Спосіб автоматичного регулювання кутової швидкості електропривода
Номер патенту: 59878
Опубліковано: 15.09.2003
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Збруцький Олександр Васильович, Прохорчук Олександр Віталійович
Формула / Реферат
Спосіб автоматичного регулювання кутової швидкості електропривода, який полягає в тому, що формують задавальний сигнал, вимірюють сигнал, пропорційний значенню кутової швидкості електропривода, задавальний сигнал порівнюють із сигналом, пропорційним кутовій швидкості електропривода, результат порівняння алгебраїчно підсумовують із сигналом, пропорційним моменту навантаження, і формують сигнал керування електроприводом пропорційно отриманій сумі, який відрізняється тим, що результат порівняння подають на вхід моделі, сигнал на вході моделі масштабують і алгебраїчно підсумовують із сигналом керування електроприводом, вимірюють сигнал на вході моделі, визначають значення нелінійної складової зовнішнього моменту навантаження відповідно з рівнянням:
F(M) = aUm,
вимірюють значення задавального сигналу і кутову швидкість електропривода, визначають значення сигналу компенсації діючого моменту навантаження у відповідності з рівнянням:
εк = b1ω + b2F(M) - b3ε3, де
ω - кутова швидкість електропривода;
ε3 - задавальний сигнал;
εк - сигнал компенсації;
Um - сигнал на виході моделі;
F(M) - поліном, що характеризує нелінійність механічної характеристики електропривода;
a, b1, b2, b3 - постійні коефіцієнти, що зберігаються в пам'яті мікропроцесора, а сигнал керування формують як алгебраїчну суму задавального сигналу і сигналу компенсації.
Текст
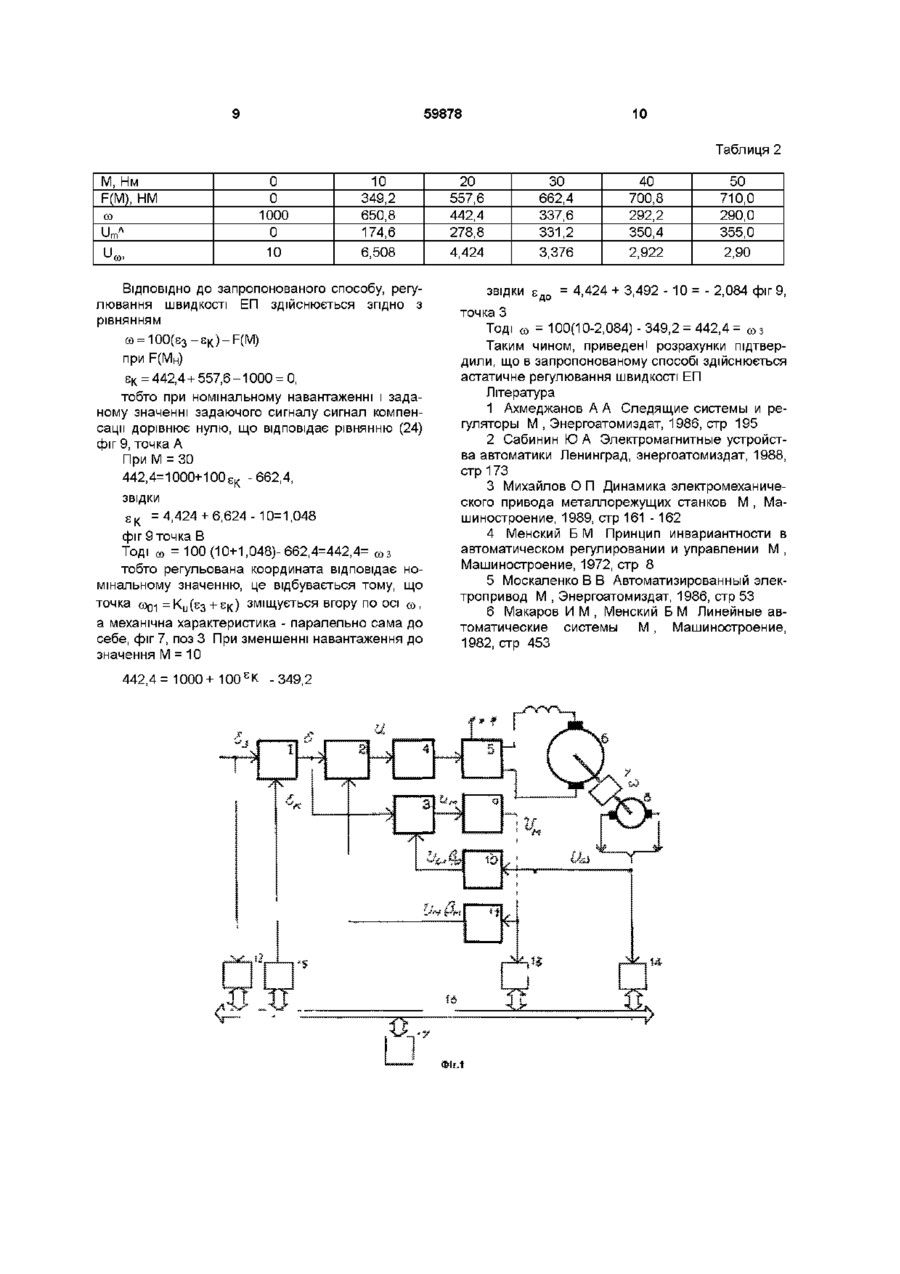
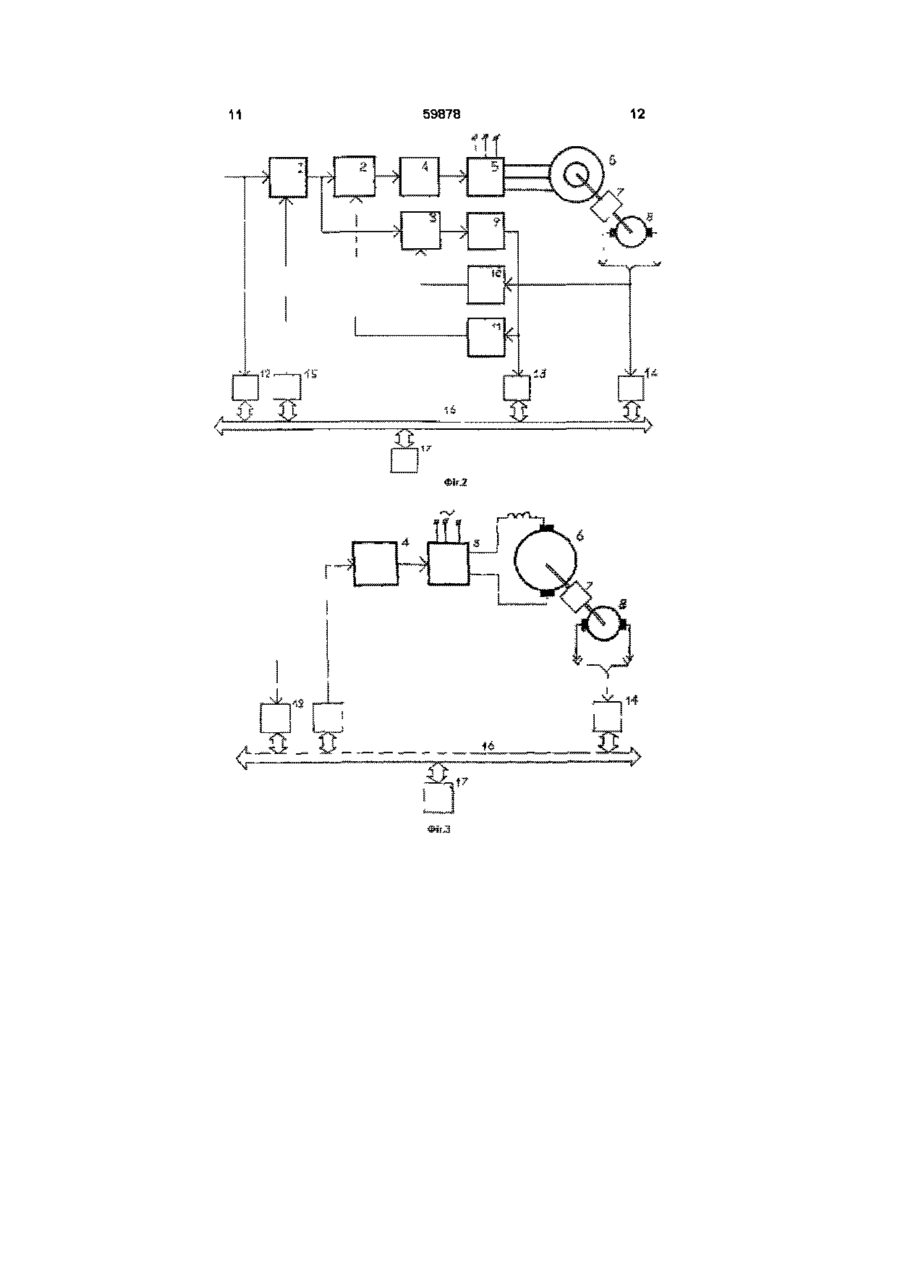
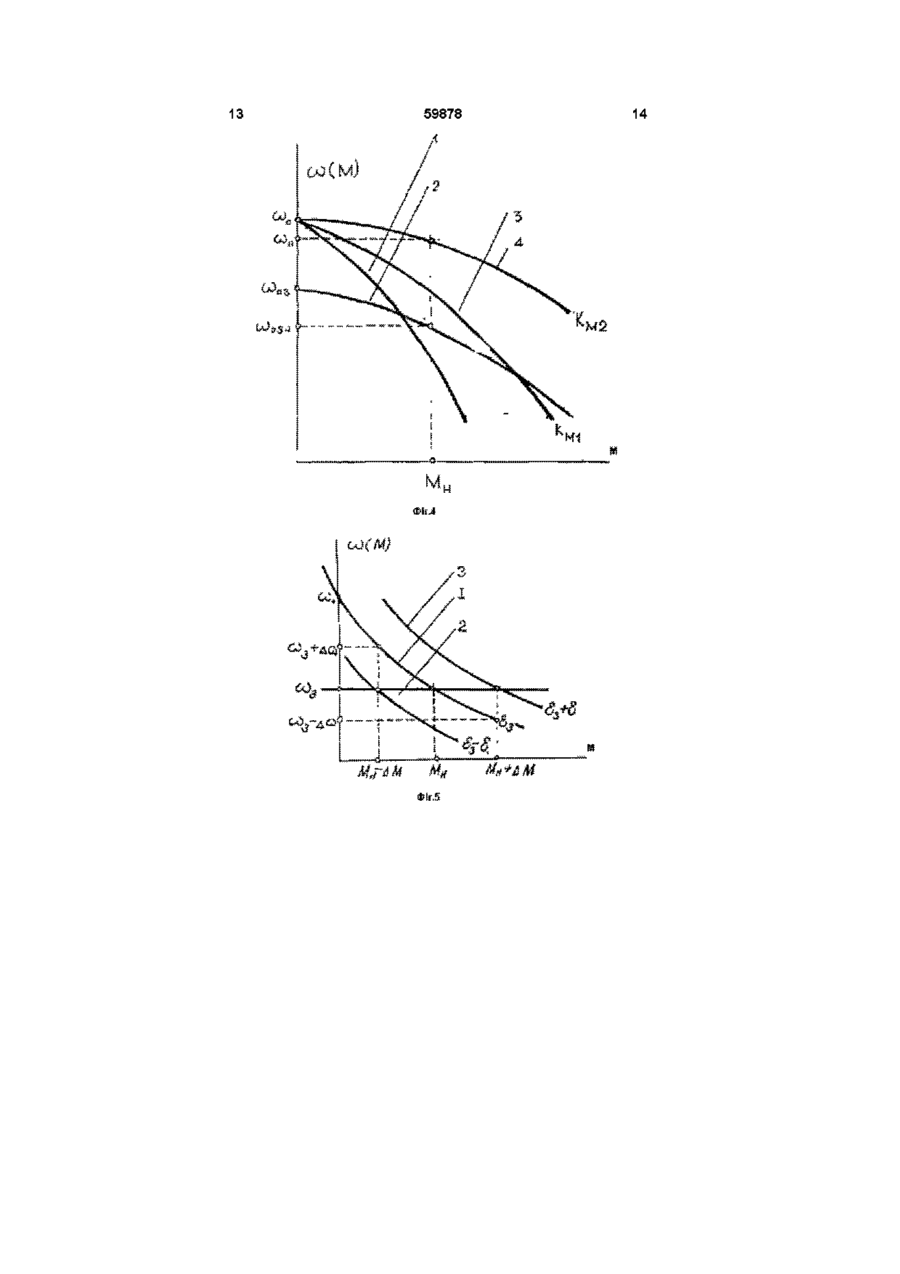
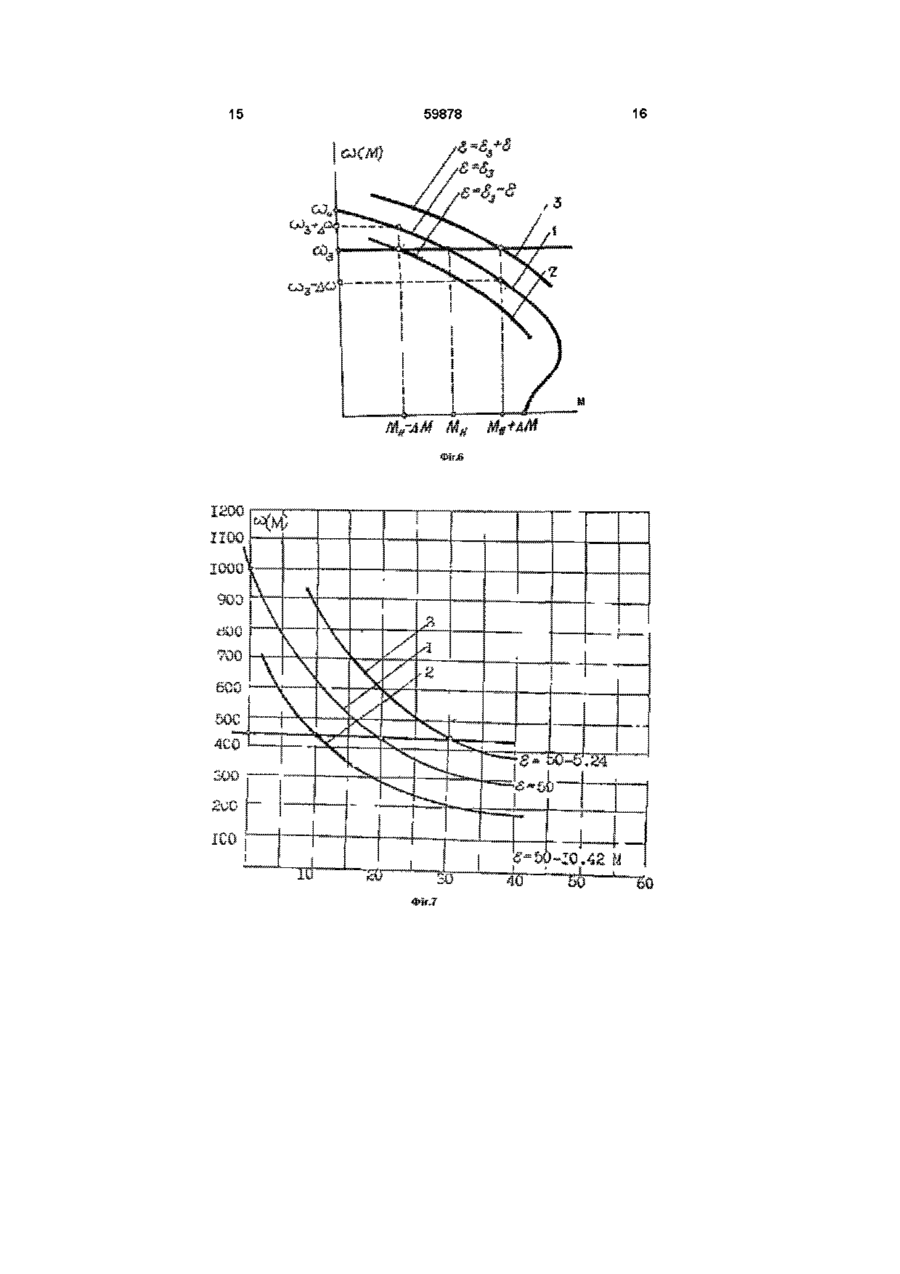
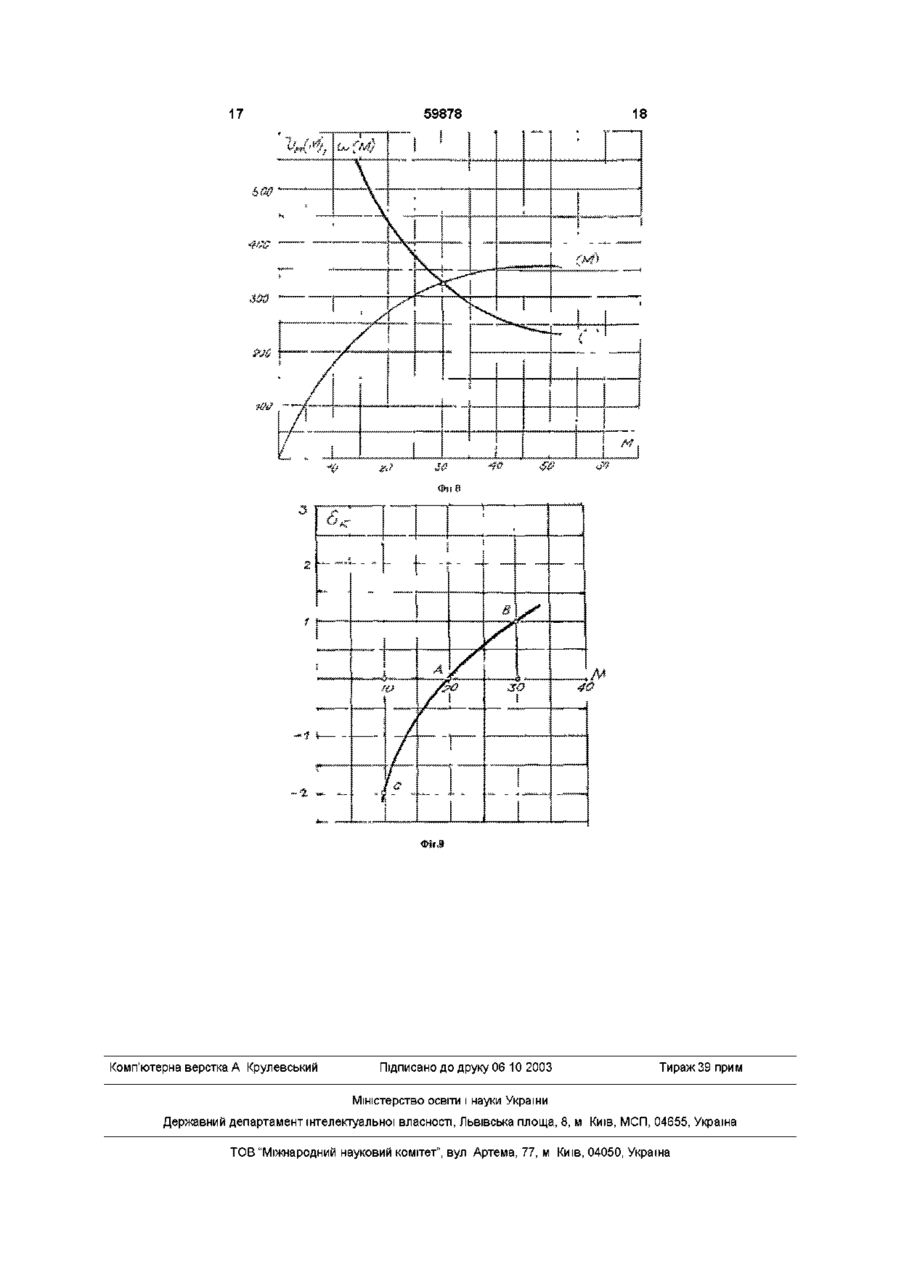
Спосіб автоматичного регулювання кутової швидкості електропривода, який полягає в тому, що формують задавальний сигнал, вимірюють сигнал, пропорційний значенню кутової швидкості електропривода, задавальний сигнал порівнюють із сигналом, пропорційним кутовій швидкості електропривода, результат порівняння алгебраїчно підсумовують із сигналом, пропорційним моменту навантаження, і формують сигнал керування електроприводом пропорційно отриманій сумі, який відрізняється тим, що результат порівняння подають на вхід моделі, сигнал на вході моделі мас штабують і алгебраїчно підсумовують із сигналом керування електроприводом, вимірюють сигнал на вході моделі, визначають значення нелінійної складової зовнішнього моменту навантаження ВІДПОВІДНО з рівнянням F(M) = aUm, вимірюють значення задавального сигналу і кутову швидкість електропривода, визначають значення сигналу компенсації діючого моменту навантаження у ВІДПОВІДНОСТІ з рівнянням єк = Ьіш + b2F(M) - Ь3єз, де ш - кутова швидкість електропривода, єз - задавальний сигнал, єк - сигнал компенсації, U m - сигнал на виході моделі, F(M) - поліном, що характеризує нелінійність механічної характеристики електропривода, а, Ь-і, Ьг, Ьз - ПОСТІЙНІ коефіцієнти, що зберігаються в пам'яті мікропроцесора, а сигнал керування формують як алгебраїчну суму задавального сигналу і сигналу компенсації 00 Винахід відноситься до області автоматичного регулювання координат електропривода в спостерігаючих системах з нелінійними механічними характеристиками Відомий спосіб автоматичного регулювання швидкості електроприводу (ЕП) полягає в тому, що вимірюють кутову швидкість регульованої координати, отримане значення порівнюють із задаючим сигналом і формують сигнал керування ЕП Цей спосіб відноситься до статичного регулювання швидкості ЕП і характеризується тим, що одночасно зі зменшенням статичної помилки зменшується коефіцієнт передачі по задаючому сигналу, що зменшує потужність на валу ЕП [1] Для надання відомому способу астатизму першого порядку вводять інтегрування сигналу помилки [2] Недолік такого способу є зменшення швидкодії процесу регулювання і, як наслідок, зменшення запасу СТІЙКОСТІ системи [3] Із цього випливає, що обмеження на збільшення добротності ЕП по швидкості пов'язані із втратою СТІЙКОСТІ При цьому, наявність зворотного зв'язку так само зменшує потужність на валу ЕП Відомий спосіб автоматичного регулювання з використанням принципу шваріантості [4] Цей принцип реалізовано у комбінованому способі автоматичного регулювання в замкнутих системах і він полягає у тому, що вимірюють момент збурювання, отримане значення алгебраїчно підсумовують із задаючим сигналом і формують сигнал компенсації моменту збурювання [5] Недоліки даного способу полягають утому, що проблема реалізації подібного додаткового зворотного зв'язку ускладнюється необхідністю використання спеціальних датчиків моменту збурювання, вбудовування яких у ЕП сполучене зі значними труднощами [3, стр 165] 00 ю 59878 Другий недолік пов'язаний з тим, що точність компенсації зовнішнього моменту визначається метрологічною точністю вимірювача моменту Третій недолік зв'язаний з тим, що наявність зворотного зв'язку зменшує потужність на валу ЕП Відомий спосіб комбінованого регулювання, що використовується в автоматичних системах для забезпечення шваріантості регульованої величини від збурювання [6], прототип, який полягаємо, що вимірюють момент збурювання, отримане значення алгебраїчно підсумовують із задаючим сигналом і формують сигнал керування ЕП Недоліком відомого способу є зменшення потужності виконавчого органа, що керує об'єктом Задача винаходу - підвищення потужності і швидкодії процесів регулювання Поставлена задача досягається тим, що результат порівняння подають на вхід моделі, сигнал з виходу моделі маштабують і алгебраїчно підсумовують із сигналом керування, вимірюють сигнал виході моделі, визначають значення нелінійної складової зовнішнього моменту навантаження ВІДПОВІДНО ДО керування F(M) = a U H вимірюють задаючий сигнал і сигнал, пропорційний значенню регульованої координати, визначають значення сигналу компенсації навантаження ВІДПОВІДНО з виразом задаючий сигнал алгебраїчно підсумовують із сигналом компенсації і формують сигнал керування електроприводом, пропорційно отриманій сумі де и г а - сигнал, пропорційний значенню кутової швидкості електропривода, U H - сигнал на виході моделі, S 3 - задаючий сигнал, F(M) - нелінійний поліном N-oro ступеня, М - момент зовнішнього навантаження, a, b і, Ьг, Ьз- ПОСТІЙНІ коефіцієнти На фіг 1 приведена структурна схема системи регулювання кутової швидкості ЕП постійного струму послідовного збудження для реалізації запропонованого способу На фіг 2 приведена структурна схема системи регулювання кутової швидкості ЕП перемінного струму На фіг 3 приведена структурна схема системи автоматичного регулювання, в якій блоки 1, 2, 3, 9, 10 і 11 реалізовані програмним шляхом у мікропроцесорі На фіг 4 приведені регулювальні характеристики контуру статичного регулювання у ВІДПОВІДНОСТІ з прототипом і ВІДПОВІДНО до запро понованого способу На фіг 5 приведені регулювальні характеристики контуру астатичного регулювання ЕП постійного струму ВІДПОВІДНО до запропонованого способу На фіг 6 приведені регулювальні характеристики астатического контуру регулювання ЕП перемінного струму На фіг 7 приведені регулювальні характеристики для розрахункового прикладу На фіг 8 приведена характеристика сигналу на виході моделі від діючого збудження На фіг 9 приведена характеристика сигналу компенсації рід діючого збудження Система для автоматичного регулювання швидкості електропривода містить перший, другий і третій 1, 2, 3 суматори, підсилювач 4, перетворювач 5, електропривод 6, навантаження 7, вимірник кутової швидкості 8, модель 9, перший і другий масштабні перетворювачі 10 і 11, перший, другий і третій 12, 13 і 14 модулі введення аналогових сигналів (АЦП), модуль виводу цифрових сигналів (ЦАП) 15, інтерфейс 16, мікропроцесор 17 Спосіб автоматичного регулювання кутової швидкості ЕП здійснюється наступним чином Рівняння механічної характеристики (MX) ЕП з нелінійною залежністю між кутовою швидкістю і моментом зовнішнього навантаження (МЗН) визначається наступною залежністю =KuU-F(M) ro (1) де а, - регульована координата, U - сигнал керування, Ки- коефіцієнт передачі по керуючому впливу , F (М) - поліном, що характеризує нелінійність зовнішнього навантаження F(M)= аім + Э2М + + ам м а-і, аг, ,а - коефіцієнти полінома, що визначаються із системи рівнянь а2 мі + + a M а2 м2 + + 32 MN + + Q N де Mi, М2, M N І (0-1,(02, ,(ом - координэти MX ЕП, які визначаються експериментально ю 0 - кутова швидкість ЕП при відсутності МЗН (точка холостого ходу) N - порядок поліному Для реалізації запропонованого способу формують сигнал s , вимірюють кутову швидкість ЕП у ВІДПОВІДНОСТІ з рівнянням U со - К со го (3) де U со - сигнал на виході вимірювача кутової швидкості, К с - коефіцієнт пропорційності о Для здійснення запропонованого способу використовується модель 9 з функцією перетворення и м = К м UM, (4) де им - сигнал на вході моделі, UM - сигнал на виході моделі, Км - коефіцієнт передачі моделі Далі, отриманий сигнал порівнюють із сигналом керування s та отримують сигнал на виході моделі ВІДПОВІДНО до рівняння UM= S - р и и и , (5) де р и - коефіцієнт передачі масштабного перетворювача 10 З врахуванням (3) рівняння (5) можна представити в наступному вигляді U M = КмС є - К ^ ю ) (6) Сигнал на виході моделі 9 UM маштабують і алгебраїчно підсумовують із сигналом s та фор 5 59878 мують сигнал керування ЕГТ ВІДПОВІДНО ДО рівняння де р м - коефіцієнт масштабного перетворю вача 11 На підставі рівнянь (1) - (7) одержують систему 2-х координатно-взаємозалежних рівнянь K u p m U m = K u s -F(M) (8) Km К » р и ( 0 -HJm^KmS (9) Систему (8) - (9) можна представити в матричній формі F(M) Kr (10) Розв'язуючи систему (9) одержують систему з 2-х параметрично-взаємозалежних рівняння (1 + К и К щ К ^ р ^ с о = K u (1 + K m p m ) s - F(M) (1 + K u K J о природної MX, що забезпечує при тому самому М навантаження більш високі швидкості регулювання, у порівнянні з прототипом, звідси випливає, що запропонований спосіб дозволяє збільшити потужність на валу ЕП як добуток діючого момента на кутову швидкість N = Mco (19) Звідси випливає важливий висновок при забезпеченні швидкостей регулювання по прототипу необхідно зменшувати потужність ЕП, що дає економію електричної енергії ЕП, що споживається з мережі З рівняння (15) випливає, що сигнал виходу моделі є пропорційним моменту навантаження, та інваріантний щодо задаючого сигналу s ВІДПОВІДНО ДО запропонованого способу сигнал керування формують як алгебраїчну суму задання S3, пропорційного заданій кутової швидкості, і сигналу SK компенсації помилки регулювання s - sз+sк (20) З врахуванням (18) рівняння (14) буде відповідати наступному виразу (21) F(M) P звідки значення сигналу компенсації S K буде відповідати рівнянню 1 s k = — со н І^ І\|| (16) Рівняння (14) можна представити в наступному вигляді F(M) 1 S3, ТОДІ F(M H ) 1 к 1 (17) 1 + KmPm Якщо навантаження на регульовану координату відповідаємо деякому номінальному значенню М = Мн, а сигнал s - значенню задаючого сигналу 1 F(M)-s3 (18) (22) Іґ ГЛ. у ( 2 3 ) — F(MH)-s3 (24) к Ь-\=—, bo = , b") = Ku K u> •SA' + 'SnPmJ ПОСТІЙНІ коефіцієнти, що зберігаються в пам'яті мікропроцесора Рівняння (21) у випадку номінального навантаження буде мати вигляд 1 c = co0 o \s (Л і І\|| ^ І ~Г Рівняння (22) можна представити в наступному вигляді s k = b-jC03 + b 2 F(M) - b 3 s 3 , де к , Де KF = 1 Порівнявши рівняння (17) і (22) одержимо, що в цьому випадку сигнал S|< - 0 тому що со3 1 1 F(M H ) = (25) Нехай навантаження ЕП зросте і стане дорівнювати F(M)= F ( M H + ДМ) Це приведе до зменшення кутової швидкості ЕП на значення 59878 со = соз-Асо і створення сигналу компенсації ВІДПОВІДНО до виразу 1 F(MH+AM), (26) ЗВІДКИ _ co3 - Aco S K ~ 1 + KU Ku(1 + Kmpm) F(MH + AM) - s3 (27) буде мати позитивне значення, пропорційне збільшенню моментального навантаження і зменшенню швидкості Регулювальна характеристика при цьому буде відповідати фіг 5, 6 поз З При зменшенні навантаження до значення F (Мн - А М), що приведе до збільшення швидкості ЕП до величини со = со3-Асо Це приведе до виникнення сигналу компенсації виразу I = 1 K S ВІДПОВІДНО ДО S U( 3~ K) -F(MH-AM)-s3, (28) значення в точці з координатами («,3 . Мн) фіг 5 і 6, поз 1 При цьому відбувається вимірювання сигналу з виходу моделі, введення в мікропроцесор і визначення діючого моменту зовнішнього навантаження ВІДПОВІДНО з рівнянням (16) При цьому, значення коефіцієнта передачі KF зберігається в пам'яті процесора як постійний коефіцієнт В процесі зміни моменту навантаження вимірюють значення сигналу завдання S3, дійсну кутову швидкість ЕП ю і визначають значення моменту навантаження ЕП F(M) = F(MH ± А М) ПОТІМ визначають значення сигналу компенсації нелінійної складової s^, яке за допомогою модуля виводу 15 подають на другий вхід суматора 1 Таким чином, регулювальні характеристики, одержані для запропонованого способу, відповідають рівнянням - для номінального навантаження со = KUS3 = Ю3 (ЗО) ЗВІДКИ „ Дсо _юз К 1 8 - при збільшенні навантаження F(MH - AM) - s 3 (29) и 1 + KmPm буде мати негативне значення, пропорційне зменшенню навантаження і збільшенню кутової швидкості ЕП Регулювальна характеристика при цьому буде відповідати фіг 5 і 6, поз 2 Таким чином, при збільшенні навантаження регулювальна характеристика зміщується нагору, а при зменшенні - вниз відносно характеристики, що відповідає номінальному значенню фіг 5 і 6, поз 4 Ця властивість запропонованого способу забезпечує астатичне регулювання швидкості ЕП, тобто інваріантність регульованої координати від моменту зовнішнього навантаження Система автоматичного регулювання кутової швидкості ЕП працює наступним чином, фіг 1, 2 Нехай до вала ЕП прикладений МЗН, що відповідає деякому номінальному значенню Мн При подачі на вхід системи задаючого сигналу S3, після закінчення перехідного процесу кутова швидкість ЕП, ВІДПОВІДНО з рівнянням (17) досягне co = K u (s 3 + s K ) = co3 (31) - при зменшенні навантаження co = K u (s 3 + s K ) = co3 (32) і являють собою пряму лінію, фіг 5,6, поз 4 Таким чином, запропонований спосіб дає можливість визначити нелінійну складову моменту навантаження і визначати значення сигналу компенсації цього збурювання, а також формувати сигнал керування ЕП, як адитивну суміш задаючого сигналу і сигналу компенсації Для доказу працездатності і досягнення позитивного ефекту запропонованого способу приведемо розрахунковий приклад Нехай механічна характеристика нелінійного об'єкта, що відповідає рівнянню co = 100s 3 -F(M), де F(M)=(43,2+0,89M-0,0062M2)M При S3 = 10 і к г а - 0,01 розрахункові значення приведені в таблиці 1 і на фіг 7, поз 1 Таблиця 1 М, Нм F(M), H (0,1/С ии,в 0 10 1000 10,0 10 349,2 650,8 6,508 Нехай F(MH) = 20, що відповідає значенню регульованої координати о, = 442,4 Задамося значеннями зміни діючого збурювання Д М = ± 50% Задамося наступними значеннями параметрів Км=Ю, р м = 1 , (Зт = 0,1 Тоді будемо мати наступне рівняння 20 557,6 442,4 4,424 ЗО 40 50 662,4 337,6 700,8 292,2 710,0 290,0 3,376 2,922 2,900 co = 100s 3 -F(M) U m = 0,5F(M) U ra = 0,01co Розрахункові значення для цих рівнянь приведені в таблиці 2 59878 10 Таблиця 2 М, Нм F(M), HM со итЛ 0 0 1000 0 10 10 349,2 650,8 174,6 6,508 ВІДПОВІДНО ДО запропонованого способу, регулювання швидкості ЕП здійснюється згідно з рівнянням ю = 100(s 3 -s K )-F(M) при F(MH) s K = 4 4 2 , 4 + 5 5 7 , 6 - 1 0 0 0 = 0, тобто при номінальному навантаженні і заданому значенні задаючого сигналу сигнал компенсації дорівнює нулю, що відповідає рівнянню (24) фіг 9, точка А При М = ЗО 442,4=1000+100 S K -662,4, ЗВІДКИ 8 к =4,424 + 6,624-10=1,048 фіг 9 точка В Тоді С = 100 (10+1,048)-662,4=442,4= с з О о тобто регульована координата відповідає номінальному значенню, це відбувається тому, що точка юоі = Ku(s3 + SK) З М | Щ У Є Т Ь С Я вгору по осі со, а механічна характеристика - паралельно сама до себе, фіг 7, поз 3 При зменшенні навантаження до значення М = 10 442,4= 1000+ 100 s K -349,2 20 557,6 442,4 278,8 4,424 звідки ЗО 662,4 337,6 331,2 3,376 £до 40 700,8 292,2 350,4 2,922 50 710,0 290,0 355,0 2,90 = 4,424 + 3,492 - 10 = - 2,084 фіг 9, точка З Тоді С = 100(10-2,084) -349,2 = 442,4= с з О о Таким чином, приведені розрахунки підтвердили, що в запропонованому способі здійснюється астатичне регулювання швидкості ЕП Література 1 Ахмеджанов А А Следящие системы и регуляторы М , Энергоатомиздат, 1986, стр 195 2 Сабинин Ю А Электромагнитные устройства автоматики Ленинград, энергоатомиздат, 1988, стр 173 3 Михайлов О П Динамика электромеханического привода металлорежущих станков М , Машиностроение, 1989, стр 161 -162 4 Менский Б М Принцип инвариантности в автоматическом регулировании и управлении М , Машиностроение, 1972, стр 8 5 Москаленко В В Автоматизированный электропривод М , Энергоатомиздат, 1986, стр 53 6 Макаров И М , Менский Б М Линейные автоматические системы М , Машиностроение, 1982, стр 453 11 59878 Фїг.3 12 13 59878 УнА 14 15 59878 ФїгЛ 16 17 Комп'ютерна верстка А Крулевський 59878 Підписано до друку 06 10 2003 18 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic controlling rotation frequency of a motor
Автори англійськоюZbrutskyi Oleksandr Vasyliovych
Назва патенту російськоюСпособ автоматического регулирования частоты вращения электродвигателя
Автори російськоюЗбруцкий Александр Васильевич
МПК / Мітки
МПК: H02P 5/00
Мітки: спосіб, електропривода, кутової, регулювання, автоматичного, швидкості
Код посилання
<a href="https://ua.patents.su/9-59878-sposib-avtomatichnogo-regulyuvannya-kutovo-shvidkosti-elektroprivoda.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання кутової швидкості електропривода</a>
Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Номер патенту: 34183
Опубліковано: 15.02.2001
Автор: Ключковський Сергій Миронович
МПК: G05D 13/00
Мітки: регулювання, здійснення, спосіб, пристрій, швидкості, кутової, автоматичного
Текст:
...і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для...
Хмельницька система автоматичного регулювання кутової швидкості теплової турбіни
Номер патенту: 836
Опубліковано: 15.12.1993
Автор: Музичук Федір Максимович
МПК: G05D 13/00
Мітки: регулювання, швидкості, система, турбіни, хмельницька, автоматичного, кутової, теплової
Формула / Реферат:
Хмельницкая система автоматического регулирования угловой скорости тепловой турбины, содержащая датчик угловой скорости, выполненный в виде подпружиненного центробежного механизма с грузами и соосной пружине муфтой, гидравлический цилиндрический поршневой серводвигатель с управляющим золотником и силовым штоком, гидравлическое цилиндрически-поршневое изодромное устройство, корпус-цилиндр которого, заполненный рабочей жидкостью, жестко связан...
Спосіб регулювання швидкості по відхиленню і регулятор швидкості для його здійснення
Номер патенту: 51957
Опубліковано: 16.12.2002
Автор: Сільченко Едуард Євгенович
МПК: H02P 5/00
Мітки: здійснення, регулятор, відхиленню, швидкості, спосіб, регулювання
Формула / Реферат:
1. Спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв’язку по швидкості, який відрізняється тим, що величину відхилення додатково зменшують на величину, рівну прогнозованій зміні швидкості при динаміці електропривода, яку спостерігають.2. Спосіб за п. 1, який відрізняється тим, що прогнозована зміна швидкості визначається за формулою:
Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів чи виробів (парс-тп) та спосіб такого регулювання
Номер патенту: 34060
Опубліковано: 15.04.2003
Автори: Костогриз Петро Васильович, Костогриз Кирило Петрович, Русінковський Олег Юрійович
МПК: F26B 3/02, F26B 21/06, F26B 25/22
Мітки: автоматичного, прогартовування, сушіння, регулювання, процесу, пристрій, парс-тп, спосіб, матеріалів, такого, виробів
Формула / Реферат:
1. Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів або виробів у сушильному агрегаті, що містить вимірювальні пристрої, кожен з яких виконаний у вигляді, принаймні одного датчика, з’єднаного з елементом порівняння, блок керування, із входами якого з’єднані вимірювальні пристрої, а вихід якого зв'язаний з виконавчим механізмом регулювального органа подачі палива у камеру спалювання, при цьому датчик першого...
Сенсор кутової швидкості
Номер патенту: 57333
Опубліковано: 16.06.2003
Автори: Кучерук Володимир Юрійович, Кулаков Павло Ігоревич, Войтович Олеся Петрівна, Поджаренко Володимир Олександрович
МПК: G01P 3/42
Мітки: швидкості, сенсор, кутової
Формула / Реферат:
Сенсор кутової швидкості, що містить вал, зв'язаний з модулятором, який має форму диска з прорізом спеціальної форми, джерело світла, розташоване перед модулятором, два лінійних фотоприймачі, зсунутих між собою відносно центра модулятора на кут, рівний 180°, діафрагму, встановлену перед першим лінійним фотоприймачем і другим лінійним фотоприймачем, яка має прорізи, форми яких обмежені двома променями, які починаються в центрі модулятора,...
Попередній патент: Завантажувальний бункер дробарки
Наступний патент: Пристрій для лікування уретритів
Випадковий патент: Спосіб опалення мартенівської печі