Адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі
Номер патенту: 80207
Опубліковано: 27.05.2013
Автори: Бандура Валентина Миколаївна, Зозуляк Оксана Володимирівна, Зозуляк Ігор Анатолійович, Чубик Роман Васильович
Формула / Реферат
Адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі, що складається з корпусу U-подібної форми із торцевими стінками, котрий оснащено дебалансним вібратором, що виконаний двосекційним з автономними самовільно синхронізуючими приводами, вали секцій вібратора розміщені вздовж корпусу U-подібної форми в площині, що проходить через його центр ваги при повному завантаженні, який відрізняється тим, що корпус U-подібної форми виконано суцільним, а вібратор керованим і привод керованого вібратора електрично з'єднаний з одним із трьох виходів блока регуляторів та одним із двох входів детектора зсуву фаз, а другий вхід детектора зсуву фаз електрично з'єднаний з одним із двох входів блока оптимальних параметрів, одним із двох входів першого компаратора та давачем вібрації, що закріплений на суміжній боковій стінці, паралельній секції корпусу U-подібної форми, вихід детектора зсуву фаз електрично з'єднано з одним із двох входів другого компаратора, другий вхід другого та першого компаратора електрично з'єднаний з двома із трьох виходів блока оптимальних параметрів, а виходи даних компараторів електрично з'єднані із двома із трьох входів блока регуляторів, третій вхід блока регуляторів електрично з'єднаний із третім виходом блока оптимальних параметрів, а другий із двох входів блока оптимальних параметрів електрично з'єднаний із блоком введення даних, а другий із трьох виходів блока регуляторів електрично з'єднаний із повітряним насосом, що закріплений на торцевій стінці корпусу U-подібної форми напроти торцевої стінки, до якої закріплена вивантажувальна горловина і повітряний насос, пневматично з'єднаний із пустотілим патрубком, що має газорозподільні отвори та розташований між даними торцевими стінками у нижній частині секції корпусу U-подібної форми, третій із трьох виходів блока регуляторів електрично з'єднаний із електротеном, що розташований в центральній частині секції корпусу U-подібної форми тена напроти торцевої стінки, до якої закріплена завантажувальна горловина.
Текст
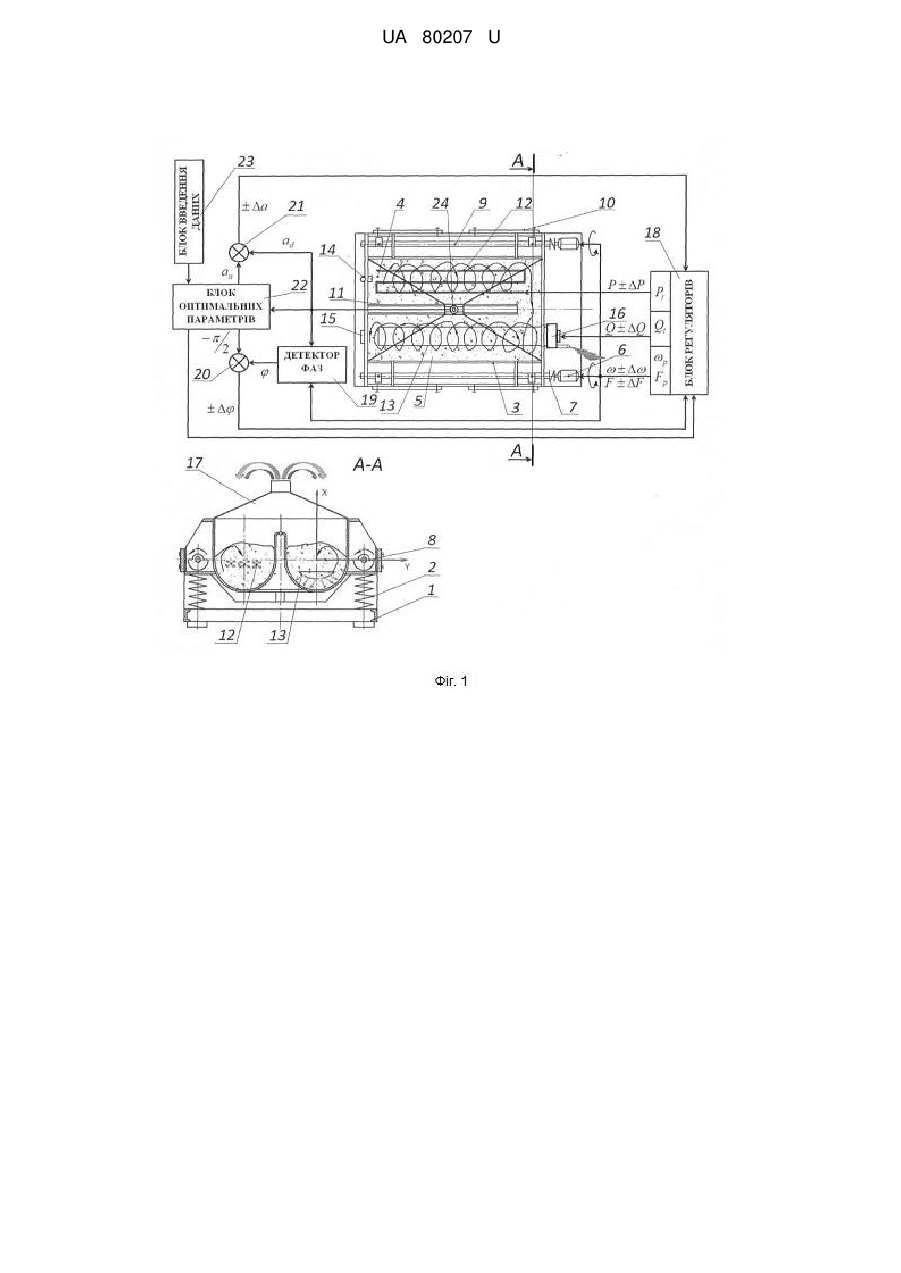
Реферат: UA 80207 U UA 80207 U 5 10 15 20 25 30 35 40 45 Пристрій призначений для сушіння гранульованих і зернистих матеріалів та використовується в харчовій, фармацевтичній, хімічній та інших галузях промисловості. Відомий пристрій [1] призначений для сушіння матеріалу у киплячому шарі, що складається із корпусу з газорозподільною решіткою, що виконана U-подібної форми із торцевими стінками, котрі з'єднані із корпусом за допомогою гнучких зв'язків, та оснащена дебалансним вібратором для надання їй коливних рухів по круговій траєкторії. В корпусі розміщені вертикальні направляючі перегородки, що встановлені під кутом до осі вала вібратора для забезпечення гвинтоподібного переміщення матеріалу. Недоліком даного пристрою є низька якість сушіння, яка обумовлена низькою інтенсивністю процесів тепло-масообміну, що є наслідком недостатнього рівня питомої потужності вібраційного поля корпусу з газорозподіляючою решіткою, що виконана U-подібної форми. Найбільш близьким аналогом є пристрій [2], призначений для сушіння матеріалу у киплячому шарі, що складається із корпусу з газорозподільною решіткою, що виконана Uподібної форми із торцевими стінками, які з'єднані із корпусом за допомогою гнучких зв'язків, та оснащена дебалансним вібратором, що виконаний двосекційним з автономними самовільно синхронізуючими приводами, вали секцій вібратора розміщені вздовж решітки в площині, що проходить через її центнер ваги при повному завантаженні, а напрямні перегородки виконані у вигляді призматичних тіл, що закріплені на бокових стінках решітки. Недоліком даного пристрою є низька якість сушіння, яка обумовлена низькою інтенсивністю процесів тепло-масообміну та великі енергозатрати на дебалансний вібропривод решітки Uподібної форми. Задачею корисної моделі є розширення технологічних можливостей та зменшення енергозатрат на привод. Поставлена задача вирішується тим, що в адаптивному пристрої для сушіння матеріалу у віброкиплячому шарі, що складається з корпусу U-подібної форми із торцевими стінками, який оснащено дебалансним вібратором, що виконаний двосекційним з автономними самовільно синхронізуючими приводами, вали секцій вібратора розміщені вздовж корпусу U-подібної форми в площині, що проходить через його центр ваги при повному завантаженні, у якому, згідно з корисною моделлю, корпус U-подібної форми виконано суцільним, а вібратор керованим і привод керованого вібратора електрично з'єднаний з одним із трьох виходів блока регуляторів та одним із двох входів детектора зсуву фаз, а другий вхід детектора зсуву фаз електрично з'єднаний з одним із двох входів блока оптимальних параметрів, одним із двох входів першого компаратора та давачем вібрації, що закріплений на суміжній боковій стінці паралельній секції корпусу U-подібної форми, вихід детектора зсуву фаз електрично з'єднано з одним із двох входів другого компаратора, другий вхід другого та першого компаратора електрично з'єднаний із двома із трьох виходів блока оптимальних параметрів, а виходи даних компараторів електрично з'єднані із двома із трьох входів блока регуляторів, третій вхід блока регуляторів електрично з'єднаний із третім виходом блока оптимальних параметрів, а другий із двох входів блока оптимальних параметрів електрично з'єднаний із блоком введення даних, а другий із трьох виходів блока регуляторів електрично з'єднаний із повітряним насосом, що закріплений на торцевій стінці корпусу U-подібної форми напроти торцевої стінки, до якої закріплена вивантажувальна горловина і повітряний насос, пневматично з'єднаний із пустотілим патрубком, що має газорозподільні отвори та розташований між даними торцевими стінками у нижній частині секції корпусу U-подібної форми, третій із трьох виходів блока регуляторів електрично з'єднаний із електротеном, що розташований в центральній частині секції корпусу U-подібної форми та напроти торцевої стінки, до якої закріплена завантажувальна горловина. В результаті відслідковування власної резонансної частоти 0 та постійної автоматичної 50 адаптації частоти 0 циклічної примусової сили Fp керованого віброприводу до її ( 0 ) значення забезпечуються мінімально можливі енергозатрати на привод при реалізації перемішування сипучого матеріалу в технологічному процесі сушіння із температурним градієнтом та технологічному процесі конвективного сушіння. В результаті відслідковування дійсної амплітуди a d коливань корпусу 3 U-подібної форми на 55 резонансній частоті 0 та автоматичній корекції амплітуди циклічної примусової сили Fp керованого віброприводу забезпечується стабільне в часі, оптимальне значення питомої потужності вібраційного поля при довільній продуктивності вібросушарки та довільній масі завантаження, що в свою чергу дозволяє забезпечити задану якість перемішування сипучого матеріалу при технологічному процесі сушіння із температурним градієнтом та технологічному процесі конвективного сушіння. 1 UA 80207 U В результаті відслідковування маси завантаження секцій 4 та 5 корпусу 3 U-подібної форми сипучим матеріалом, провадиться автоматична корекція температурного Pt та конвективного Qt , градієнта відповідно до дійсної (реальної) маси сипучого матеріалу в секціях 4 та 5, що 5 10 15 20 25 30 35 40 дозволяє забезпечити задані технологічно оптимальні умови для процесу сушіння сипучого матеріалу та відповідну якість кінцевої продукції. На фіг. 1 зображено електромеханічну структуру запропонованого адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі. На фіг. 2 зображено перемішування сипучого матеріалу по спіралеподібній траєкторії. Адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі складається із рами 1, на якій на пружній підвісці 2 встановлено корпус U-подібної форми 3. Корпус U-подібної форми складається із першої секції 4 та другої секції 5, на суміжній боковій стінці паралельнії секції Uподібної форми 11 закріплено давач вібрації 24. На корпусі U-подібної форми 3 розміщено приводи 6 керованого інерційного віброприводу секцій U-подібної форми, котрі через муфти 7 та вали 9 передають крутний момент до дебалансних вантажів 8 керованих вібраторів. На корпусі U-подібної форми 3 по бокам розташовано додатковий вантаж 10, що дозволяє усунути вплив маси завантаження сипучого середовища секцій U-подібної форми на самосинхронізацію приводів. В першій U-подібній секції 4 корпусу 3 розташована завантажувальна горловина 14 та електротен 12, що розташований в центральній частині секції 4 корпусу U-подібної форми 3 та навпроти торцевої стінки, до якої закріплена завантажувальна горловина 14. В другій U-подібній секції 5 корпусу 3 розташована вивантажувальна горловина 15 та пустотілий патрубок 13 із газорозподільними отворами, до кінця пустотілого патрубку 13 пневматично під'єднаний повітряний насос 16, що закріплений на торцевій стінці корпусу U-подібної форми 3 навпроти торцевої стінки, до якої закріплена вивантажувальна горловина 15. Корпус U-подібної форми 3 закривається газовивідною кришкою 17. Приводи 6 керованих вібраторів електрично з'єднані із виходом блока регуляторів 18, також із відповідними виходами блока регуляторів 18 електрично з'єднані електротен 12 та повітряний насос 16. Давач вібрації 24 електрично з'єднаний із входами блока оптимальних параметрів 22, детектором фаз 19 та першим компаратором 21. Інший вхід детектора фаз 19 електрично з'єднаний із приводами 6 керованих вібраторів, а вихід детектора фаз 19 електрично з'єднаний із входом другого компаратора 20. Два виходи блока оптимальних параметрів 22 електрично з'єднані із входами першого (21) та другого (20) компараторів, а виходи даних компараторів електрично з'єднані із входами блока регуляторів 18. Ще один вихід блока оптимальних параметрів 22 електрично з'єднаний із входом блока регуляторів 18, вхід блока оптимальних параметрів 22 електрично з'єднаний із виходом блока введення даних 23. Адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі працює наступним чином. Після запуску приводів 6 корпус U-подібної форми 3 разом із сипучим матеріалом в Uподібних секціях 4 та 5 починає здійснювати коливні рухи по коловій (еліптичній) траєкторії на частоті p , відмінній від власної резонансної 0 для коливної механічної системи запропонованого адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі. Коловий рух (еліптичний) будь-якої точки корпус U-подібної форми 3 пояснюється тим, що під дією керованого вібратора накладаються коливання в двох взаємно перпендикулярних напрямах X та Y, що знову ж таки обумовлено різною жорсткістю спіральних пружин (пружної підвіски 2) у вертикальному та горизонтальному напрямах, і в результаті дійсне значення амплітуди 2 45 50 2 визначається ad ax ax . Стійкий коливний V Y рух по коловій (еліптичній) траєкторії корпусу U-подібної форми 3 досягається завдяки синхронній роботі керованих вібраторів, тобто завдяки самосинхронізації приводів 6. Для забезпечення самосинхронізації приводів у вібромашинах із аналогічною будовою корпусу (U-подібної форми) в роботах [3, 4, 5] використано додатковий вантаж. Зокрема в запропонованій конструкції адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі для забезпечення самосинхронізації приводів 6 по бокам корпусу Uподібної форми 3 розташовано додатковий вантаж 10, відповідно [3, 4, 5], це дозволяє усунути негативний вплив маси завантаження сипучого матеріалу в секціях 4 та 5 на самосинхронізацію х приводів 6. Протягом декількох секунд роботи приводів 6 при сталій початковій частоті p 55 циклічної примусової сили Fp керованого вібратора (віброприводу) відбувається встановлення (врівноваження) амплітуди коливань корпус U-подібної форми 3. В результаті колових рухів сипучого матеріалу в U-подібних секціях 4 та 5 проходить перемішування сипучого матеріалу. За рахунок безперервної подачі сипучого матеріалу через завантажувальну горловину 14 відбувається процес ідеального витіснення, котрий, відповідно до [6], полягає у поршневому 2 UA 80207 U 5 10 15 20 25 30 35 переміщенні потоку сипучого матеріалу та повному перемішуванні в напрямі перпендикулярному до руху потоку сипучого матеріалу. Отже у встановленому режимі роботи адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі, в U-подібних секціях 4 та 5 проходить перемішування сипучого матеріалу по спіралеподібній траєкторії (фіг. 2). Така форма руху сипучого матеріалу по секції 4 U-подібного корпусу забезпечує рівномірне прогрівання всього об'єму сипучого матеріалу електротеном 12. В результаті температурного градієнта в першій секції 4 U-подібного корпусу, відповідно до [7], відбуватиметься вилучення вологи із верхніх шарів елементів (елементарних частинок), що являють собою сипучий матеріал. Відповідно до [7], при інтенсивному нагріванні вологого тіла (в нашому випадку елементарної частинки сипучого матеріалу) в його середині виникає надлишковий тиск через внутрішній опір тіла руху пари, що утворилась в результаті швидкого випаровування вологи. Тобто, при температурному градієнті в першій секції 4 U-подібного корпусу попри випаровування вологи із верхніх шарів, волога все ж таки залишається в центральних шарах елементарних частинок сипучого середовища. Для усунення даного недоліку технологічного процесу сушіння температурним градієнтом у другій секції 5 U-подібного корпусу при перемішуванні сипучого матеріалу за допомогою пустотілого патрубка 13 із газорозподільними отворами та повітряного насосу 16 реалізовується технологічний процес конвективного сушіння. Відповідно до [8], при конвективному сушінні волога видаляється із елементарних частинок сипучого матеріалу в результаті випаровування із верхніх шарів, а на зміну волозі, що випарувалась із центральних шарів елементарних частинок сипучого матеріалу, переміщається волога під дією градієнта концентрації вологи. В результаті чого у встановленому режимі роботи (при сталій дійсній амплітуді a d та частоті d коливань) корпусу 3 U-подібної форми при перемішуванні сипучого матеріалу реалізується технологічний процес сушіння із температурним градієнтом та технологічний процес конвективного сушіння. В процесі подачі сипучого матеріалу через завантажувальну горловину 14 (та одночасне вивантаження готової продукції через вивантажувальну горловину 15) відбувається постійна зміна маси корпусу 3 U-подібної форми, також але в меншій мірі, на зміну маси корпусу 3 U-подібної форми впливає постійне випаровування вологи та можлива зміна подачі кількості сипучого матеріалу (за одиницю часу) обумовлена зовнішніми факторами, зокрема зв'язком продуктивності запропонованого адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі із іншими технологічно пов'язаними машинами та процесами, для яких запропонований пристрій є лише одним елементом цілої структури. В будь-якому випадку, відповідно до [9, 10], зміна маси корпусу 3 Uподібної форми є причиною зміни власної резонансної частоти 0 коливної механічної системи запропонованого адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі. В свою чергу зміна власної резонансної частоти а0 коливної механічної системи при сталій початковій частоті p циклічної примусової сили Fp керованого віброприводу викличе зміну дійсної амплітуди a d та фази коливань корпусу 3 U-подібної форми. Тобто адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі почне віддалятися (або наближуватись) до власної 40 резонансної частоти 0 завдяки зміні маси корпусу 3 U-подібної форми. Відповідно до [10], мінімально можливі енергозатрати на вібропривод можливі лише при постійному резонансному режимі роботи вібромашин, тобто коли частота p циклічної примусової сили керованого віброприводу рівна власній резонансній частоті 0 коливної механічної системи адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі. Зміну даних динамічних параметрів 45 50 (дійсної амплітуди a d та фази коливань) корпусу 3 U-подібної форми фіксує давач вібрації 24, що закріплений на суміжній боковій стінці 11 паралельній секції U-подібної форми. Відповідно до [10], при резонансному режимі роботи існує відставання фази амплітуди коливань робочого органа (корпусу 3 U-подібної форми) від циклічної примусової сили керованого віброприводу на / 2 . Для того, щоб визначити в яку сторону і наскільки коливна механічна система відійшла від власної резонансної частоти 0 (при сталій p ) інформація від давача вібрації 24 надходить в детектор фаз 19, куди також надходить інформація від приводів 6 про фазу циклічної примусової сили Fp керованого віброприводу. В результаті цього в детекторі фаз 19 постійно в реальному часі проводиться визначення зсуву фаз між амплітудою коливань корпусу 3 U-подібної форми та циклічною примусовою силою Fp керованого віброприводу. Тобто, при будь-якій масі завантаження корпусу 3 U-подібної форми сипучим 3 UA 80207 U 5 матеріалом та при будь-якій заданій технологічно оптимальній продуктивності адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі на виході детектора фаз 19 отримуємо зсув фаз , який в компараторі 20 порівнюється із / 2 енергетично оптимальним значенням. В результаті такого порівняння на виході компаратора 20 отримується величина, що чітко та однозначно характеризує, в яку сторону і на скільки коливна механічна система відійшла від власної резонансної частоти 0 (при сталій p ). На основі параметра блок регуляторів 18 формує поправку ±А& частоти циклічної примусової сили Fp керованого віброприводу, тобто 10 15 20 25 30 35 корегує так, щоб завжди була справедлива рівність p 0 , забезпечуючи тим постійний резонансний режим роботи та мінімальні енергозатрати на привод запропонованого адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі. Постійний резонансний режим роботи адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі супроводжується зміною частоти 0 та амплітуди a d коливань корпусу 3 U-подібної форми. Даний корпус (3) виконує роботу по перемішуванні сипучого матеріалу (при заданому ідеальному витіснені, тобто заданій технологічно оптимальній продуктивності) при технологічному процесі сушіння із температурним градієнтом та технологічному процесі конвективного сушіння. При заданому технологічно оптимальному часі перебування сипучого матеріалу в адаптивному пристрої для сушіння матеріалу у віброкиплячому шарі зміна динамічних параметрів (дійсної амплітуди a d та власної резонансної частоти 0 , що рівна p ) може бути причиною недовиконання (перевиконання) роботи з перемішування сипучого матеріалу. У випадку недовиконання роботи з перемішування, сипучий матеріал буде недосушеним, через недостатньо якісне перемішування та розділення елементарних складових частинок сипучого матеріалу за об'ємом U-подібних секцій 4 та 5, що зумовить згустки та локальні об'єднання із підвищеною вологістю, які пройдуть "необробленими" крізь температурний градієнт та конвективне сушіння. У випадку перевиконання роботи з перемішування, сипучий матеріал при стабільній подачі (продуктивності, витісненні) пройде довгий шлях по витках спіралі (пройде по спіралі із більшим діаметром ніж потрібно для оптимального сушіння), тому довше буде знаходитись в полі температурного градієнта та конвективного сушіння, що негативно вплине на фізико-хімічні характеристики кінцевого продукту. Також слід врахувати той факт, що від динамічних параметрів частоти cdq та амплітуди ad коливань корпусу 3 U-подібної форми залежить час перебування елементарної частинки сипучого матеріалу в корпусі 3 U-подібної форми та безпосередньо під дією температурного градієнта. Відповідно до [11], для того щоб стабілізувати роботу з перемішування сипучого матеріалу на заданому технологічно оптимальному рівні доцільно скористатись стабілізацією питомої потужності вібраційного поля (відома ще під назвою як інтегральний критерій оцінки рівності вібрацій різних частот [12, 13]) корпусу 3 U-подібної форми. Враховуючи, що питома потужність вібраційного поля корпусу 3 U-подібної форми - це питома робота (над одиницею маси) за одиницю часу, то, стабілізувавши її при будь яких a d та 0 над одиницею сипучого матеріалу, буде виконана задана робота за заданий технологічно оптимальний час сушіння. Відповідно до [11], питома потужність вібраційного поля корпусу 3 U40 2 3 подібної форми визначається як (a d ) (0 ) . Якщо оптимальною є питома потужність 2 3 вібраційного поля, що визначається як задана (a z ) (z ) , де a z та z - задані технологічно оптимальні параметри вібраційного поля, при яких протягом заданого часу сушіння отримуємо задане значення якості вихідної продукції. Тому, для того, щоб не змінилась питома потужність вібраційного поля необхідне значення амплітуди коливань a n корпусу 3 U-подібної форми при 45 мінімальних енергозатратах на вібропривод (тобто, при 2 3 2 0 ) можна легко вирахувати, 3 прирівнявши (an ) (0 ) (a z ) (z ) . Для того, щоб стабілізувати питому роботу вібраційного поля корпусу 3 U-подібної форми сигнал із давача вібрації 24 надходить в компаратор 21, де дійсне a d значення амплітуди коливань корпусу 3 U-подібної форми (при даній резонансній частоті б)0) порівнюється із необхідним значенням амплітуди коливань a n корпусу 3 U-подібної 50 форми. Необхідне значення амплітуди коливань a n корпусу 3 U-подібної форми безпосередньо в блоці оптимальних параметрів 22 обчислюється постійно (в реальному масштабі часу) за 4 UA 80207 U 2 3 3 наступним законом an (az ) (z ) (0 ) . Всі технологічно оптимальні параметри, що стосуються енергетичних режимів роботи пристрою / 2 , питомої потужності вібраційного поля az та z , технологічних параметрів сушіння (зокрема часу сушіння t , продуктивності повітряного насоса Q t задана та виділеної потужності тепла Pt задана на електротені для заданої 5 10 маси завантаження сипучим матеріалом корпусу 3 U-подібної форми) в блок технологічно оптимальних параметрів 22 потрапляють із блока введення даних 23. В результаті постійного в часі порівняння на виході компаратора 21 отримується параметр a , який чітко та однозначно дозволяє зробити висновок, на скільки і в яку сторону необхідно провести корекцію амплітуди коливань корпусу 3 U-подібної форми для того, щоб забезпечити стабільне в часі значення питомої потужності вібраційного поля в секціях 4 та 5 корпусу 3 U-подібної форми. На основі блок регуляторів 18 проводить корекцію амплітуди циклічної примусової сили Fp керованого віброприводу та забезпечує стабільне значення питомої потужності вібраційного поля корпусу 3 U-подібної форми, що в свою чергу забезпечує задану якість перемішування сипучого матеріалу. Зміна власної резонансної частоти 0 свідчить про зміну маси завантаження сипучим матеріалом в секціях 4 та 5 корпусу 3 U-подібної форми вона може бути зовнішньо обумовлена (іншими технологічними пристроями чи процесами), зокрема зміною продуктивності адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі, або зміною фізичних параметрів сипучого матеріалу (зокрема густини). Якість технологічного процесу сушіння із температурним градієнтом та технологічного процесу конвективного сушіння пов'язана [7, 8] певними оптимальними співвідношеннями між часом сушіння, масою сипучого матеріалу, температурним та конвективним градієнтом. Тому, у адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі включено корекцію температурного та конвективного градієнта в залежності від маси сипучого матеріалу, що перебуває секціях 4 та 5 корпусу 3 Uподібної форми. Інформація про масу завантаження сипучим матеріалом (про її зміну) a 15 20 25 передається через власну резонансну частоту 0 корпусу 3 U-подібної форми давачем вібрації 24 в блок оптимальних параметрів 22. В блоці оптимальних параметрів 22, виходячи із заданих оптимальної продуктивності повітряного насоса Q t задана та оптимальної виділеної потужності тепла Pt задана на електротені, для заданої маси завантаження сипучим матеріалом корпусу 3 U30 подібної форми (тобто для певного заданого 0 задана ) проводить визначення необхідної продуктивності повітряного насоса Q t та оптимальної виділеної потужності тепла Pt на електротені для дійсної маси завантаження сипучим матеріалом (тобто для реальної 0 ) секцій 4 та 5. При лінійних залежностях між масою сипучого матеріалу, температурою, кількістю повітря та часом сушіння можна стверджувати про те, що при 35 0 задана Q t задана , а при 0 Qt то із даного припущення легко обчислити необхідну поправку для Q t . В даному випадку Qt Qt задана 0 0 задана електротеном Pt Для визначення поправки на корекцію виділеної потужності тепла можна обчислити із тих же самихміркувань Pt Pt задана 0 0 задана Pt задана . У випадку нелінійних залежностей між масою сипучого 40 матеріалу, температурою, кількістю повітря та часом сушіння поправку можна обчислити, виходячи із даних залежностей, але запропоноване конструктивне рішення адаптивного пристрою для сушіння матеріалу у віброкиплячому шарі реалізувати можливість корекції температурного та конвективного градієнта по будь-якому закону. Тому, на основі Qt та Pt блок регуляторів проводить безпосередній вплив на кількість тепла, що виділяється (12), та 45 на продуктивність повітряного насоса 16, забезпечуючи оптимальні параметри для сушіння сипучого матеріалу в секціях 4 та 5 корпусу 3 U-подібної форми. Джерела інформації: 1. Авт. св. № 252191 (СРСР), М. Кл. F 26В. Устройство для сушения материала в кипящем слое. Э.Н. Гулида, О.П. Калиновская, А.И. Чернявский, В.Д. Кармазин (СРСР). - № 1248885/216; Опубл. 20.07.1968; Бюл. № 9, 2 ст. 5 UA 80207 U 5 10 15 20 25 30 35 40 45 50 2. Авт. св. № 388180 (СРСР), М. Кл. F26В. Устройство для сушения материала в кипящем слое. О.П. Калиновская, А. И. Чернявский, В. И. Лабай, М. Н. Осередчук, И. Ш. Тюктяев, В.Я. Лысенко, А. В. Филатов. (СРСР). - № 1671772/24-6; Опубл. 22.06.1973; Бюл. № 28, 2 ст. 3. Авт. св. № 406711 (СРСР), М. Кл. В24В 31/06. Установка для вибрационной обработки деталей. В.А. Повидайло, П. Д. Денисов, В.А. Щигель (СРСР). - № 1663153/25-8; Опубл. 21.11.1973; Бюл. № 46, 2 ст. 4. Авт. св. № 795905 (СРСР), М. Кл. В24В 31/06.Установка для вибрационной обработки деталей. П.Д. Денисов, В. И. Кармалюк, Н. Ф. Брайлян (СРСР). - № 2693889/25-8; Опубл. 15.06.1982; Бюл. № 22, 3 ст. 5. Авт. св. № 935256 (СРСР), М. Кл. В24В 31/06. Вибрационная установка. П.Д. Денисов, В.И. Кармалюк, Н.Ф. Брайлян (СРСР). - № 2693889/25-8; Опубл. 15.01.1981; Бюл. № 2, 2 ст. 6. Анисимов А. В., Тимофеев B. C. Расчет и оптимизация химических реакторов. Часть 1. Идентификация структуры потоков в химических реакторах методом исследования функций откликов. Конспект лекций. - М.: МИТХТ, Росвузнаука, 1992.-40 с. 7. Лыков М. В. Сушка в химической промышленности. - М.: Химия, 1970.-432 с. 8. Горбатюк В. И. Процесы и апараты пищевых производств. -М.: Колос, 1999.-335 ст. 9. Хайкии С. Э. Физические основы механики. - М.: Наука, 1971.-751 с. ІО.Пат. 87776 А Україна, B65G27/00. Спосіб керування роботою адаптивних вібраційних технологічних машин. Середа Л. П., Чубик Р. В., Ярошенко Л. В. (Україна). - № а200803685; Опубл. 10. 08. 2009; Бюл. № 15, 4 ст. 11.Пат. 92041 А Україна, B65G27/100. Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин. Середа Л. П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200806209; Опубл. 27.09.2010; Бюл. № 18, 3 ст. 12.Шмигальський В.Н. Критерий равноценности вибраций различных частот // Труды НИИЖБ. Гостстройиздат. - М.: 1959. - № 11. - С.35-41. 1З.Сердюк Л. И., Давыденко Ю. А., Осина Л. М. Различные подходы к оценке динамических, энергетических и технологических возможностей вибрационных машин //Вибрации в технике и технологиях. Всеукраїнський науково-технічний журнал. 2004. - № 3 (35) - C.113-117. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі, що складається з корпусу U-подібної форми із торцевими стінками, котрий оснащено дебалансним вібратором, що виконаний двосекційним з автономними самовільно синхронізуючими приводами, вали секцій вібратора розміщені вздовж корпусу U-подібної форми в площині, що проходить через його центр ваги при повному завантаженні, який відрізняється тим, що корпус U-подібної форми виконано суцільним, а вібратор керованим і привод керованого вібратора електрично з'єднаний з одним із трьох виходів блока регуляторів та одним із двох входів детектора зсуву фаз, а другий вхід детектора зсуву фаз електрично з'єднаний з одним із двох входів блока оптимальних параметрів, одним із двох входів першого компаратора та давачем вібрації, що закріплений на суміжній боковій стінці, паралельній секції корпусу U-подібної форми, вихід детектора зсуву фаз електрично з'єднано з одним із двох входів другого компаратора, другий вхід другого та першого компаратора електрично з'єднаний з двома із трьох виходів блока оптимальних параметрів, а виходи даних компараторів електрично з'єднані із двома із трьох входів блока регуляторів, третій вхід блока регуляторів електрично з'єднаний із третім виходом блока оптимальних параметрів, а другий із двох входів блока оптимальних параметрів електрично з'єднаний із блоком введення даних, а другий із трьох виходів блока регуляторів електрично з'єднаний із повітряним насосом, що закріплений на торцевій стінці корпусу Uподібної форми напроти торцевої стінки, до якої закріплена вивантажувальна горловина і повітряний насос, пневматично з'єднаний із пустотілим патрубком, що має газорозподільні отвори та розташований між даними торцевими стінками у нижній частині секції корпусу Uподібної форми, третій із трьох виходів блока регуляторів електрично з'єднаний із електротеном, що розташований в центральній частині секції корпусу U-подібної форми тена напроти торцевої стінки, до якої закріплена завантажувальна горловина. 6 UA 80207 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive device for material drying in vibro-boiling bed
Автори англійськоюChubyk Roman Vasyliovych, Zozuliak Ihor Anatoliiovych, Bandura Valentyna Mykolaivna, Zozuliak Oksana Volodymyrivna
Назва патенту російськоюАдаптивное устройство для сушки материала в виброкипящем слое
Автори російськоюЧубик Роман Васильевич, Зозуляк Игорь Анатольевич, Бандура Валентина Николаевна, Зозуляк Оксана Владимировна
МПК / Мітки
МПК: F26B 17/00
Мітки: сушіння, матеріалу, віброкиплячому, пристрій, адаптивний, шарі
Код посилання
<a href="https://ua.patents.su/9-80207-adaptivnijj-pristrijj-dlya-sushinnya-materialu-u-vibrokiplyachomu-shari.html" target="_blank" rel="follow" title="База патентів України">Адаптивний пристрій для сушіння матеріалу у віброкиплячому шарі</a>
Спосіб сушіння сипких газопроникних матеріалів у щільному шарі
Номер патенту: 20931
Опубліковано: 15.02.2007
Автори: Ханик Ярослав Миколайович, Римар Тетяна Іванівна, Креховецький Орест Мирославович
Мітки: щільному, сушіння, газопроникних, матеріалів, спосіб, шарі, сипких
Формула / Реферат:
Спосіб сушіння сипких газопроникних матеріалів у щільному шарі, що включає нагрівання інфрачервоним випромінюванням з одночасним профільтровуванням теплоносія під дією перепаду тисків через шар вологого матеріалу, розміщеного на перфорованій поверхні, який відрізняється тим, що сушінню піддають матеріал, попередньо сформований, наприклад, у вигляді частинок циліндричної форми.
Апарат для сушіння і гранулювання термолабільних продуктів у псевдозрідженому шарі
Номер патенту: 21918
Опубліковано: 10.04.2007
Автор: Марчевський Віктор Миколайович
МПК: A23J 1/00
Мітки: продуктів, термолабільних, гранулювання, псевдозрідженому, сушіння, шарі, апарат
Формула / Реферат:
1. Апарат для сушіння і гранулювання термолабільних продуктів у псевдозрідженому шарі, що містить корпус, газорозподільний пристрій, пристрій для завантаження твердих часток і вивантаження гранул, патрубок для введення рідкого продукту, пристрій для нанесення плівки рідкого продукту на тверді частинки, що розміщений у псевдозрідженому шарі, який відрізняється тим, що пристрій для нанесення плівки рідкого продукту на тверді частинки розміщений...
Спосіб сушіння і гранулювання термолабільних продуктів з розчинів і суспензій у псевдозрідженому шарі
Номер патенту: 22340
Опубліковано: 25.04.2007
Автор: Марчевський Віктор Миколайович
Мітки: псевдозрідженому, продуктів, сушіння, суспензій, спосіб, шарі, термолабільних, гранулювання, розчинів
Формула / Реферат:
Спосіб сушіння і гранулювання розчинів і суспензій у псевдозрідженому шарі, що включає нанесення рідкого продукту в потоці теплоносія та розподілення вихідного рідкого продукту у вигляді плівки на поверхні напрямних, розміщених в шарі гранул, який відрізняється тим, що рідину розподіляють у вигляді кільцевої плівки по поверхні рухомих елементів, занурених в псевдозріджений шар, які створюють і направляють потік гранул і теплоносія по поверхні...
Установка для сушіння зернистих матеріалів у псевдозрідженому шарі
Номер патенту: 5577
Опубліковано: 15.03.2005
Автори: Роман Сергій Миколайович, Хвастухін Юрій Іванович, Когута Микола Карпович, Костогриз Кирило Петрович
МПК: F26B 17/10
Мітки: зернистих, псевдозрідженому, установка, шарі, матеріалів, сушіння
Формула / Реферат:
1. Установка для сушіння зернистих матеріалів у псевдозрідженому шарі, що містить корпус з робочою і газопідвідною камерами, між якими розміщена газорозподільна решітка з отворами, завантажувальний пристрій і патрубок для розвантаження висушеного матеріалу, розміщені на протилежних торцевих стінках робочої камери, а також патрубок для підведення псевдозріджуючого агента-теплоносія, розміщений на торцевій стінці газопідвідної камери під...
Спосіб сушіння смуги матеріалу з покриттям та пристрій для здійснення сушіння
Номер патенту: 44250
Опубліковано: 15.02.2002
Автор: Сідл Пол Г.
МПК: F26B 13/10
Мітки: покриттям, сушіння, смуги, спосіб, матеріалу, здійснення, пристрій
Формула / Реферат:
1. Способ сушки полосы материала с покрытием в устройстве для сушки, кожух которого содержит, по меньшей мере, первую зону устройства для сушки и выходную зону устройства для сушки, в котором флотационно пропускают полосу материала через указанный кожух, нагревая ее, нагнетают воздух снаружи в кожух устройства для сушки и нагревают поступивший снаружи воздух, отличающийся тем, что нагретый поступивший снаружи кожуха устройства для сушки...
Попередній патент: Електролітак а.в. молодожонова “швидка допомога”
Наступний патент: Спосіб настроювання устатковання для мікрофільмування документів
Випадковий патент: Одношарова обмотка якоря електричної машини