Спосіб і система для виявлення ушкодження ротора двигуна літального апарата і двигун літального апарата
Формула / Реферат
1. Спосіб виявлення ушкодження ротора двигуна літального апарата, який включає вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту, який відрізняється тим, що
зчитують зібрані дані,
на основі зібраних даних обчислюють середній вектор вібрації в вибраному інтервалі швидкостей обертання ротора, причому амплітуда зазначеного інтервалу швидкостей обертання ротора відповідає значенню, що становить від 1% до 10% номінальної швидкості обертання ротора,
обчислюють різницю векторів між середнім вектором вібрації контрольованого польоту і середнім вектором вібрації контрольного польоту для вибраного інтервалу швидкостей обертання ротора,
порівнюють модуль різниці векторів з попередньо заданою граничною величиною,
генерують сигнал тривоги, якщо модуль зазначеної різниці векторів перевищує попередньо задану граничну величину,
та тим, що зазначені операції виконують за результатами контрольованого польоту.
2. Спосіб за п. 1, який відрізняється тим, що додатково
обчислюють другу різницю векторів між кожним вектором вібрації контрольованого польоту і середнім вектором вібрації контрольного польоту для того самого інтервалу швидкостей обертання ротора,
обчислюють модуль другої різниці векторів, яка зв’язана з кожним вектором вібрації, для вибору найбільшого модуля,
порівнюють найбільший модуль з попередньо заданою граничною величиною та генерують сигнал тривоги, якщо найбільший модуль перевищує попередньо задану граничну величину.
3. Спосіб за п.1, який відрізняється тим, що додатково
обчислюють третю різницю векторів між кожним вектором вібрації контрольованого польоту і середнім вектором вібрації контрольованого польоту для того самого інтервалу швидкостей обертання ротора,
обчислюють модуль третьої різниці векторів, яка зв’язана з кожним вектором вібрації, для вибору найбільшого модуля,
порівнюють найбільший модуль з попередньо заданою граничною величиною,
генерують сигнал тривоги, якщо найбільший модуль перевищує попередньо задану граничну величину.
4. Спосіб за пп.1-3, який відрізняється тим, що контрольний політ відповідає польоту, який передує контрольованому польоту.
5. Спосіб за пп.1-3, який відрізняється тим, що контрольний політ відповідає польоту, який зв’язаний зі стандартним контрольним двигуном.
6. Спосіб за пп. 1-4, який відрізняється тим, що додатково передбачає крок відновлення середніх векторів контрольного польоту на основі даних контрольованого польоту, якщо модуль чи найбільший модуль різниці векторів не перевищує попередньо заданої граничної величини.
7. Спосіб за пп.1-6, який відрізняється тим, що граничну величину модуля різниці векторів попередньо задають відповідно до розташування засобів вимірювання вібрації і вибирають в інтервалі (5.08 μm – 12.70 μm (2 mils – 5 mils)) 50-125 мкм.
8. Система виявлення ушкодження ротора двигуна літального апарата, який оснащено засобами вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту, яка відрізняється тим, що містить
засіб зчитування зібраних даних,
засіб обчислення векторів вібрації як функції швидкості обертання ротора,
засіб обчислення інтервалів швидкості обертання ротора на основі зібраних даних,
засіб обчислення середнього вектора вібрації в вибраному інтервалі швидкостей обертання ротора на основі зібраних даних, причому зазначений інтервал швидкостей обертання ротора відповідає від 1% до 10% номінальної швидкості обертання ротора,
засіб обчислення різниці векторів між середнім вектором вібрації контрольованого польоту і середнім вектором вібрації контрольного польоту для вибраного інтервалу швидкостей обертання ротора,
засіб порівняння модуля різниці векторів з попередньо заданою граничною величиною,
засіб генерації сигналу тривоги, якщо модуль різниці векторів перевищує граничну величину,
і запам’ятовуючий засіб для збереження даних, які характеризують швидкість обертання ротора, а також амплітуду й фазу його вібрації, для їхньої обробки за результатами контрольованого польоту.
9. Система за п.8, яка відрізняється тим, що додатково містить
засіб обчислення другої різниці векторів між кожним вектором вібрації контрольованого польоту і середнім вектором вібрації контрольного польоту для того самого інтервалу швидкостей обертання ротора,
засіб обчислення модуля другої різниці векторів, яка зв’язана з кожним вектором вібрації, та вибору найбільшого модуля,
засіб порівняння найбільшого модуля з попередньо заданою граничною величиною
і засіб генерації сигналу тривоги, якщо найбільший модуль перевищує попередньо задану граничну величину.
10. Система за п.8, яка відрізняється тим, що додатково містить
засіб обчислення третьої різниці векторів між кожним вектором вібрації контрольованого польоту і середнім вектором вібрації контрольованого польоту для того самого інтервалу швидкостей обертання ротора,
засіб обчислення модуля третьої різниці векторів, яка зв’язана з кожним вектором вібрації, для вибору найбільшого модуля,
засіб порівняння найбільшого модуля з попередньо заданою граничною величиною
і засіб генерації сигналу тривоги, якщо найбільший модуль перевищує попередньо задану граничну величину.
11. Система за пп.8-10, яка відрізняється тим, що щонайменше один засіб вимірювання вібрації розташований у радіальній площині двигуна.
12. Двигун літального апарата, який містить компресор, оснащений першою групою обертових дисків, і турбіну, оснащену другою групою обертових дисків, який відрізняється тим, що містить систему виявлення згідно з пп.8-11.
13. Двигун за п.12, який відрізняється тим, що система виявлення містить перший засіб вимірювання вібрації на рівні першої групи обертових дисків і другий засіб вимірювання вібрації на рівні другої групи обертових дисків.
Текст
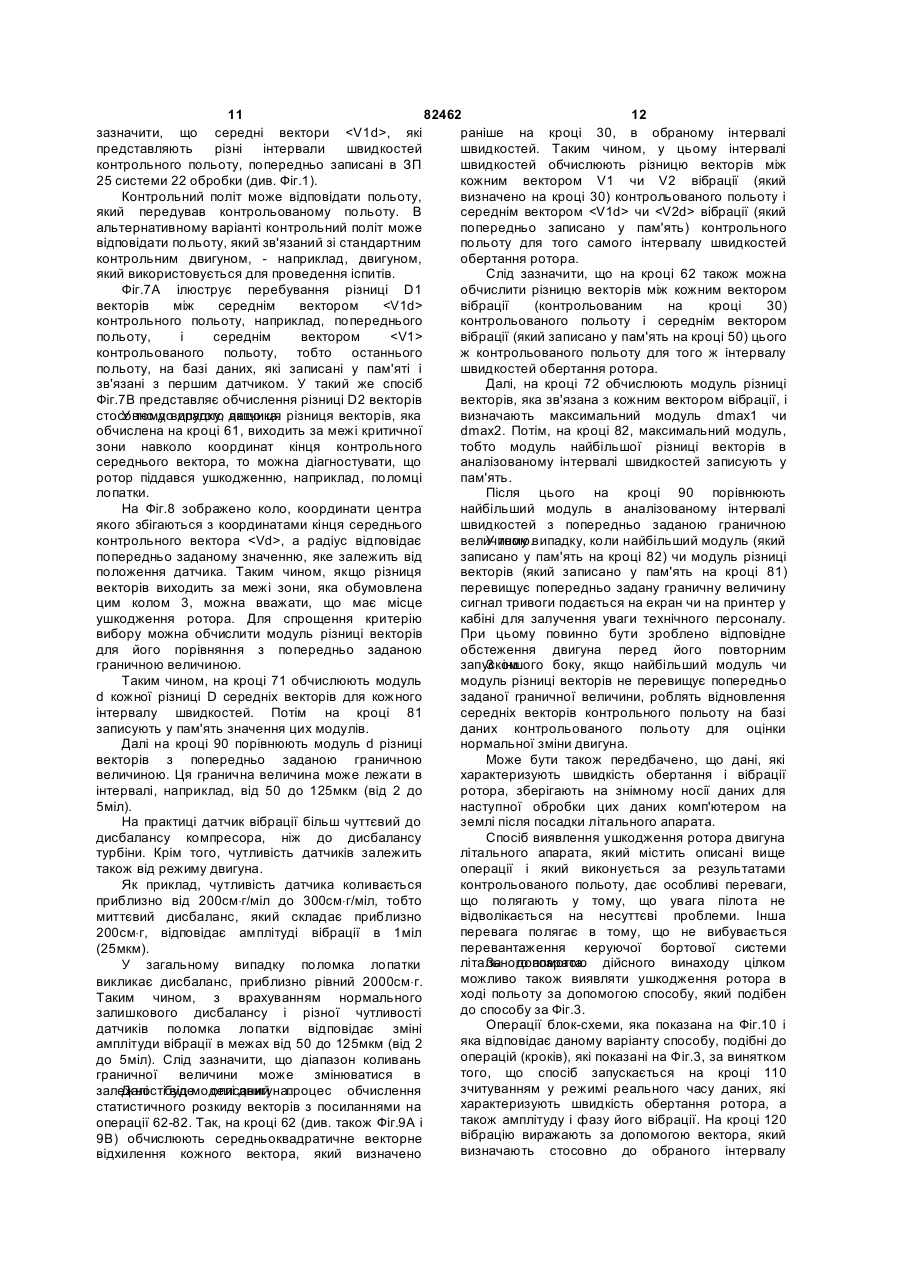
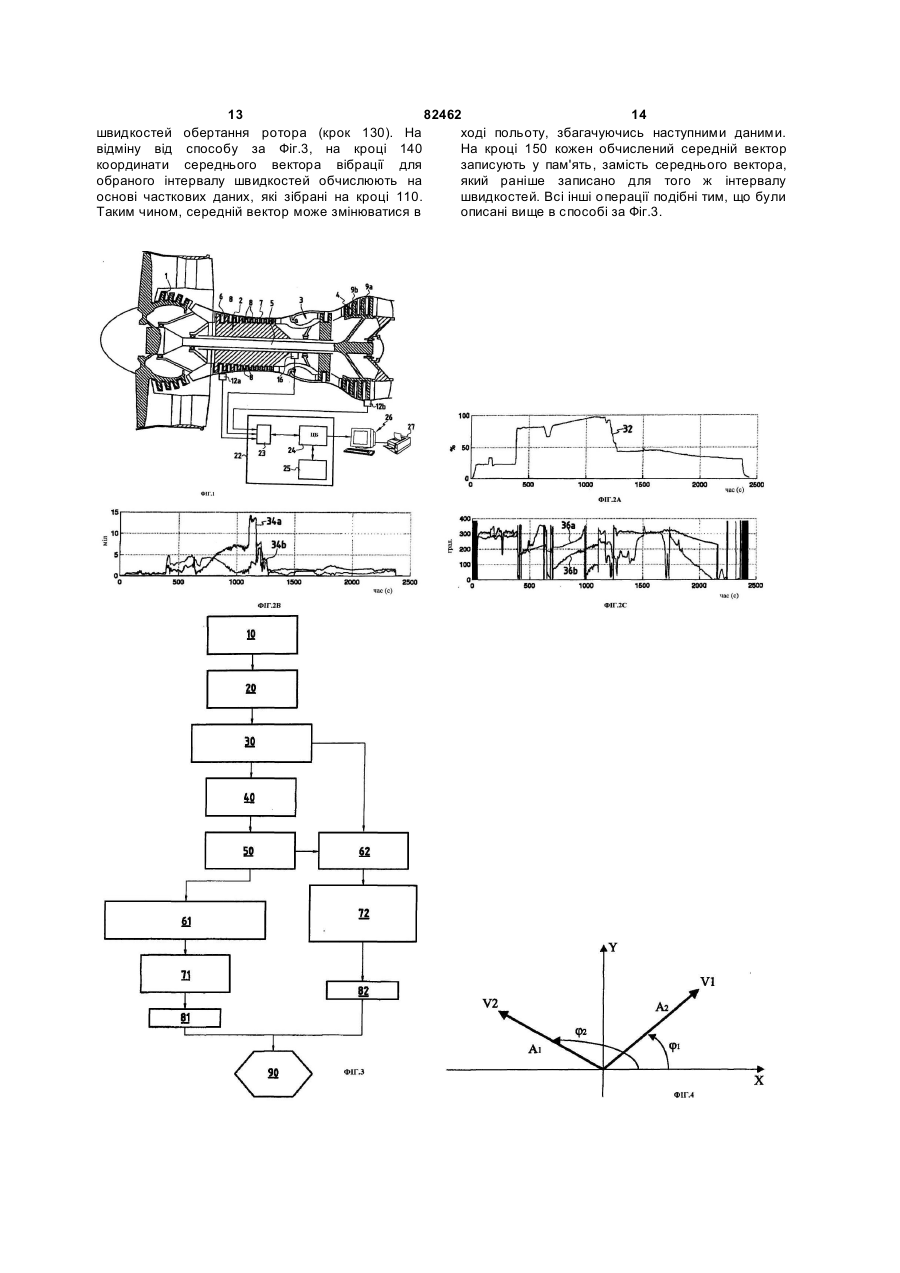
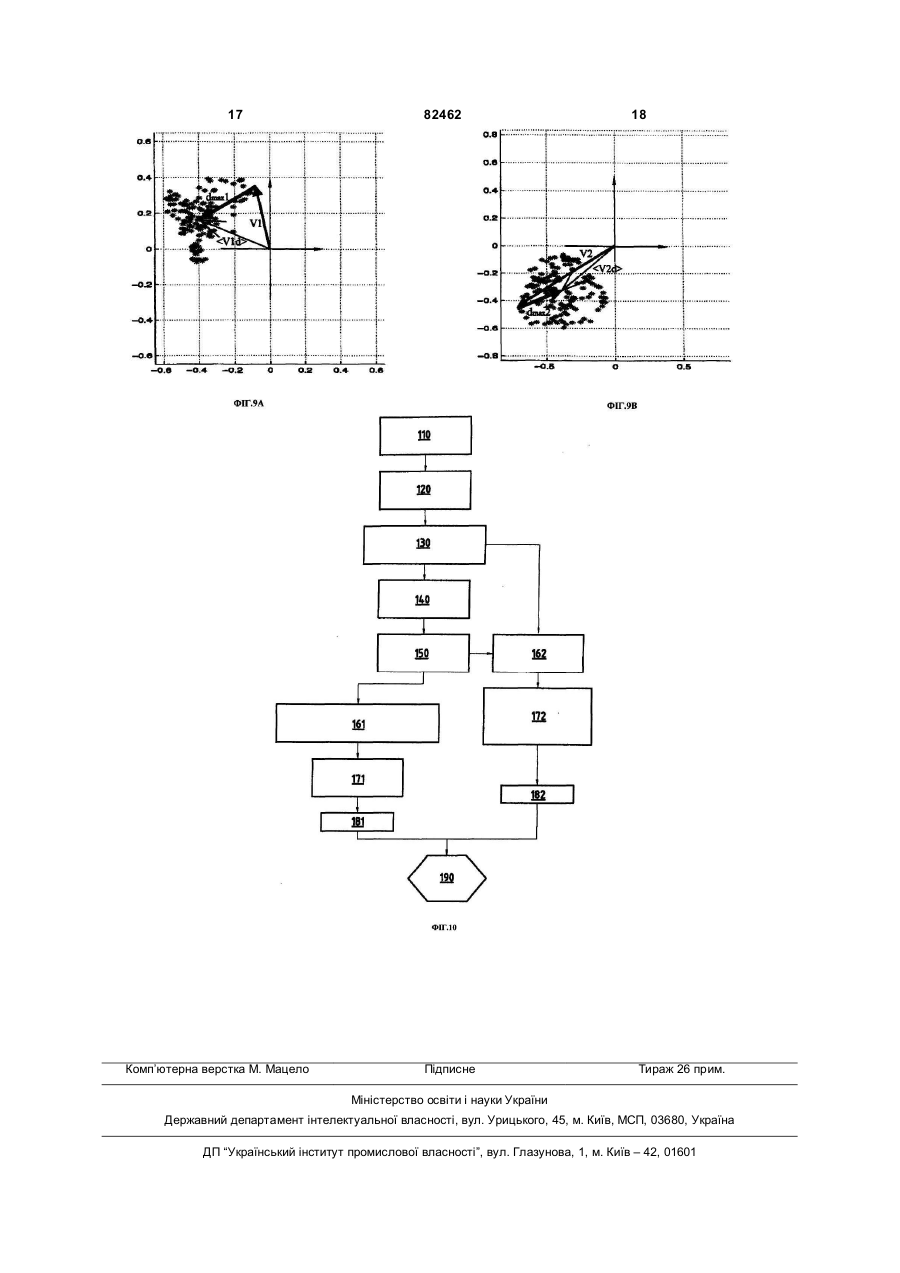
1. Спосіб виявлення ушкодження ротора двигуна літального апарата, який включає вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту, який відрізняється зчитують тим, що зібрані дані, на основі зібраних даних обчислюють середній вектор вібрації в вибраному інтервалі швидкостей обертання ротора, причому амплітуда зазначеного інтервалу швидкостей обертання ротора відповідає значенню, що становить від 1% до 10% номінальної швидкості обертання ротора, обчислюють різницю векторів між середнім вектором вібрації контрольованого польоту і середнім вектором вібрації контрольного польоту для вибраного інтервалу швидкостей обертання порівнюють модуль різниці векторів з попередньо ротора, заданою граничною величиною, генерують сигнал тривоги, якщо модуль зазначеної різниці векторів перевищує попередньо задану граничну величину, та тим, що зазначені операції виконують за результатами контрольованого польоту. 2. Спосіб за п. 1, який відрізняється тим, що додатково обчислюють другу різницю векторів між кожним вектором вібрації контрольованого польоту і середнім вектором вібрації контрольного польоту 2 (19) 1 3 82462 4 також амплітуду і фазу його вібрації під час засіб обчислення модуля другої різниці векторів, контрольованого польоту, яка відрізняється тим, яка зв’язана з кожним вектором вібрації, та вибору що містить найбільшого модуля, засіб зчитування зібраних даних, засіб порівняння найбільшого модуля з засіб обчислення векторів вібрації як функції попередньо заданою граничною величиною швидкості обертання ротора, і засіб генерації сигналу тривоги, якщо найбільший засіб обчислення інтервалів швидкості обертання модуль перевищує попередньо задану граничну ротора на основі зібраних даних, величину. засіб обчислення середнього вектора вібрації в 10. Система за п.8, яка відрізняється тим, що вибраному інтервалі швидкостей обертання додатково містить ротора на основі зібраних даних, причому засіб обчислення третьої різниці векторів між зазначений інтервал швидкостей обертання кожним вектором вібрації контрольованого ротора відповідає від 1% до 10% номінальної польоту і середнім вектором вібрації швидкості обертання ротора, контрольованого польоту для того самого засіб обчислення різниці векторів між середнім інтервалу швидкостей обертання ротора, вектором вібрації контрольованого польоту і засіб обчислення модуля третьої різниці векторів, середнім вектором вібрації контрольного польоту яка зв’язана з кожним вектором вібрації, для для вибраного інтервалу швидкостей обертання вибору найбільшого модуля, ротора, засіб порівняння найбільшого модуля з засіб порівняння модуля різниці векторів з попередньо заданою граничною величиною попередньо заданою граничною величиною, і засіб генерації сигналу тривоги, якщо найбільший засіб генерації сигналу тривоги, якщо модуль різниці модуль перевищує попередньо задану граничну векторів перевищує граничну величину, величину. і запам’ятовуючий засіб для збереження даних, які 11. Система за пп.8-10, яка відрізняється тим, що характеризують швидкість обертання ротора, а щонайменше один засіб вимірювання вібрації також амплітуду й фазу його вібрації, для їхньої розташований у радіальній площині двигуна. обробки за результатами контрольованого 12. Двигун літального апарата, який містить польоту. компресор, оснащений першою групою обертових 9. Система за п.8, яка відрізняється тим, що дисків, і турбіну, оснащену другою групою додатково містить обертових дисків, який відрізняється тим, що засіб обчислення другої різниці векторів між містить систему виявлення згідно з пп.8-11. кожним вектором вібрації контрольованого 13. Двигун за п.12, який відрізняється тим, що польоту і середнім вектором вібрації контрольного система виявлення містить перший засіб польоту для того самого інтервалу швидкостей вимірювання вібрації на рівні першої групи обертання ротора, обертових дисків і другий засіб вимірювання вібрації на рівні другої групи обертових дисків. Даний винахід відноситься до виявлення ушкодження ротора двигуна літального апарата. Діючі правила в цивільній авіації вимагають спостереження за вібрацією двигуна літального апарата. Це спостереження виконується звичайно за допомогою акселерометрів. Сигнал, який надходить від кожного акселерометра, спочатку обробляється для виділення з нього частотних складових, які відповідають швидкостям обертання роторів ступеней та низького тиску і високого тиску, які входять у склад двигуна. Дані амплітуди цих складових направляються в режимі реального часу в кабіну, і деякі необхідні для контролю величини записуються в пам'ять для наступного використання. Звичайно для одного польоту в стійких умовах, які попередньо задані, записують від 5 до 10 величин. На жаль, трапляється, що ротор двигуна літального апарату ушкоджується, наприклад, при відриві лопаток, і це ушкодження залишається не виявленим через недостатню кількість отримуваних даних. Таким чином, існує насущна потреба в системі, яка забезпечує безпомилкове виявлення ушкодження ротора двигуна літального апарата. Задача, на рішення якої спрямований дійсний винахід, полягає в створенні способу виявлення ушкодження ротора двигуна літального апарата для забезпечення гарного функціонування двигуна і безпеки літального апарата. Іншою задачею є забезпечення по можливості швидкої діагностики для того, щоб фахівці з технічного обслуговування могли підготуватися до вирішення виниклої проблеми. Ще однією задачею є виконання профілактичного технічного обслуговування. Згідно з винаходом рішення поставленої задачі досягається за рахунок створення способу виявлення ушкодження ротора двигуна літального апарата, який містить засоби вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту. Спосіб за винаходом характеризується тим, що передбачає наступні операції: зчитують зазначені зібрані дані, на основі зазначених зібраних даних обчислюють середній вектор вібрації в обраному інтервалі швидкостей обертання ротора, 5 82462 6 обчислюють різницю векторів між середнім яка дозволяє здійснювати спосіб, який описаний вектором вібрації контрольованого польоту і вище. середнім вектором вібрації контрольного польоту Рішення поставленої задачі забезпечується за для обраного інтервалу швидкостей обертання рахунок створення системи виявлення ротора, порівнюють модуль зазначеної різниці векторів ушкодження ротора двигуна літального апарата, з попередньо заданою граничною величиною, який оснащено засобами виміру вібрації і причому зазначені операції обчислення, швидкості для збору даних, які характеризують порівняння і генерації виконують за результатами швидкість обертання ротора, а також амплітуду і контрольованого польоту, сразу його вібрації під час контрольованого генерують сигнал тривоги, якщо модуль польоту. Система за винаходом містить: зазначеної різниці векторів перевищує зазначену засіб зчитування зібраних даних, граничну величину, засіб обчислення векторів вібрації як функції при цьому зазначені операції" виконують за швидкості обертання ротора, результатами контрольованого польоту. засіб обчислення безлічі інтервалів швидкості Спосіб згідно з винаходом може також обертання ротора на основі зазначених зібраних передбачати наступні операції: даних, обчислюють другу різницю векторів між засіб обчислення середнього вектора вібрації кожним вектором вібрації контрольованого в обраному інтервалі швидкостей обертання польоту і середнім вектором вібрації контрольного ротора на основі зазначених зібраних даних, польоту для того самого інтервалу швидкостей засіб обчислення різниці векторів між середнім обертання ротора, вектором вібрації контрольованого польоту і обчислюють модуль зазначеної другої різниці середнім вектором вібрації контрольного польоту векторів, яка зв'язана з кожним вектором вібрації, для обраного інтервалу швидкостей обертання для вибору найбільшого модуля, ротора, порівняння модуля зазначеної різниці засіб порівнюють зазначений найбільший модуль з векторів з попередньо заданою граничною попередньо заданою граничною величиною, величиною, генерують сигнал тривоги, якщо зазначений засіб генерації сигналу тривоги, якщо модуль найбільший модуль перевищує попередньо задану зазначеної різниці векторів перевищує зазначену граничну величину. граничну величину і Крім того, спосіб згідно з винаходом може запам'ятовуючий засіб для збереження також передбачати наступні операції: зазначених даних, які характеризують швидкість обчислюють третю різницю векторів між обертання ротора, а також амплітуду і фазу його кожним вектором вібрації контрольованого вібрації, для їхньої обробки за результатами польоту і середнім вектором вібрації контрольованого польоту. контрольованого польоту для того самого Система виявлення згідно з винаходом може інтервалу швидкостей обертання ротора, також містити: обчислюють модуль зазначеної третьої різниці засіб обчислення другої різниці векторів між векторів, яка зв'язана з кожним вектором вібрації, кожним вектором вібрації контрольованого для вибору найбільшого модуля, польоту і середнім вектором вібрації контрольного порівнюють зазначений найбільший модуль з польоту для того самого інтервалу швидкостей попередньо заданою граничною величиною, обертання ротора, генерують сигнал тривоги, якщо зазначений засіб обчислення модуля зазначеної другої найбільший модуль перевищує попередньо задану різниці векторів, яка зв'язана з кожним вектором граничну величину. вібрації, для вибору найбільшого модуля, Згідно з першою особливістю винаходу засіб порівняння зазначеного найбільшого контрольний політ відповідає польоту, який модуля з попередньо заданою граничною передує контрольованому польоту. величиною і Згідно з другою особливістю винаходу засіб генерації сигналу тривоги, якщо контрольний політ відповщає польоту, який зазначений найбільший модуль перевищує зв'язаний зі стандартним контрольним двигуном. попередньо задану граничну величину. В оптимальному прикладі здійснення спосіб за Крім того, система виявлення згідно з винаходом передбачає операцію відновлення винаходом може також містити: середніх векторів контрольного польоту на основі засіб обчислення третьої різниці векторів між даних контрольованого польоту, якщо зазначений кожним вектором вібрації контрольованого модуль чи найбільший модуль різниці векторів не польоту і середнім вектором вібрації перевищує попередньо заданої граничної контрольованого польоту для того самого величини. інтервалу швидкостей обертання ротора, Зазначений інтервал швидкостей обертання засіб обчислення модуля зазначеної третьої ротора переважно відповідає від 1% до 10% різниці векторів, яка зв'язана з кожним вектором номінальної швидкості обертання ротора. вібрації, для вибору найбільшого модуля, Гранична величина попередньо задається засіб порівняння зазначеного найбільшого згідно з розташуванням засобів виявлення вібрації модуля з попередньо заданою граничною і обирається в інтервалі 50-125мкм (2-5мл). величиною і Винахід охоплює також систему виявлення засіб генерації сигналу тривоги, якщо ушкодження ротора двигуна літального апарата, зазначений найбільший модуль перевищує попередньо задану граничну величину. 7 82462 8 утворений комплектом дисків, на яких укріплені Система виявлення переважно містить рухливі лопатки 8. Статор утворений декількома щонайменше один засіб виміру вібрації, який рядами нерухомих лопаток, які можуть бути розташований у радіальній площині двигуна. укріплені на корпусі 7. Винахід охоплює також двигун літального Турбіна 4 містить одну чи кілька ступеней, апарата, який містить компресор, який оснащений причому кожна ступень складається з фат першою групою обертових дисків, і турбіну, яка нерухомих лопаток 9а і ґрат рухливих лопаток 9b, оснащена другою групою обертових дисків, і в які укріплені на диску. який функціонує система виявлення, яка При роботі турбіни різні лопатки піддаються охарактеризована вище. впливу аеродинамічних зусиль. Крім того, рухливі У доцільнішому прикладі здійснення двигуна лопатки 8 і 9b піддані впливу відцентрового система виявлення містить перший засіб виміру зусилля, яке пропорційно квадрату швидкості вібрації на рівні першої групи обертових дисків і обертання. Таким чином, лопатки і їхнє кріплення другий засіб виміру вібрації на рівні другої групи на диску розраховуються по розмірах на найважчі обертових дисків. умови експлуатації. Не є обмежуючими приклади здійснення Лопатка, яка являє собою свого роду дійсного винаходу будуть докладніше описані пластину, може вібрувати з власною частотою, яка нижче з посиланнями на додані креслення, на залежить від форми і розмірів лопатки і виду її яких: Фіг.1 зображений турбореактивний двигун на кріплення на диску. літального апарата і схема системи виявлення Ця вібрація може збуджуватися вихровими ушкодження ротора згідно з винаходом, потоками, які зароджуються на вихідній крайці Фіг.2А-2С ілюструють реєстрацію даних, які лопаток, механічними силами, які виникають у характеризують відповідно швидкість, амплітуду і роторі, коли він має занадто великий дисбаланс, фазу, які згідно з винаходом записуються в чи аеродинамічною нестабільністю. Створювана в пам'ять запам'ятовуючого пристрою (ЗП), результаті цього вібрація може викликати поломку Фіг.3 являє собою органиграмму, тобто блокчи втрату однієї чи декількох лопаток. схему способу виявлення ушкодження ротора При цьому деякі ушкодження обертових літального апарата згідно з винаходом, деталей породжують різку зміну дисбалансу Фіг.4 являє собою діаграму векторів вібрації, відповідного ротора і, як наслідок, вібрацію. яка одержується згідно зі способом за Фіг. У загальному випадку вібрація двигунів Фіг.5 представляє амплітуди векторів вібрації відслідковується акселерометрами чи іншими в залежності від швидкості згідно зі способом за датчиками вібрації. Кожен датчик може складатися Фіг.3, з двох датчиків, які утворюють між собою кут, Фіг.6А і 6В представляють скупчення крапок, переважно кут 90°, у радіальній площині двигуна. які представляють декартові координати кінців Датчики можуть бути розміщені на корпусі 7 на векторів вібрації і відповідні їм середні вектори для рівні турбіни 4, одного з компресорів 1, 2 чи між обраного інтервалу швидкостей згідно зі способом компресорами. Зрозуміло, доцільніше, щоб датчик за Фіг.3, вібрації був розташований напроти рухливого на Фіг.7А і 7В показані різниці векторів між диска чи дисків, що підлягають спостереженню. середніми векторами контрольного польоту і На Фіг.1 схематично показаний перший датчик середніх векторів контрольованого польоту згідно 12а вібрації, який поміщений на рівні компресора зі способом за Фіг.3, 2, і другий датчик 12b вібрації, який розміщений на на Фіг.8 зображено коло, яке обмежує рівні турбіни 4. Очевидно, що число датчиків граничну зону згідно зі способом за Фіг.3, вібрації може бути будь-яким, а їхнє розташування на Фіг.9А і 9В показані різниці векторів між може бути різним. середніми векторами контрольного польоту і Відомим образом кожен датчик вібрації чи векторами контрольованого польоту згідно зі інший вимірювальний засіб подає електричний способом за Фіг.3, сигнал, який представляє механічну вібрацію Фіг.10 зображує органиграмму, тобто блоккомпресора чи турбіни. Після посилення і схему варіанта способу виявлення ушкодження фільтрації сигнал перетвориться в цифрові дані ротора літального апарата в ході польоту. аналого-цифровим перетворювачем для Відомості, які підтверджують можливість кількісного аналізу. здійснення винаходу Крім того, датчик 16 швидкості вимірює На Фіг.1 зображена частина двигуна швидкість обертання ротора, який входить до літального апарата, зокрема, турбореактивного складу компресора, причому мається також інший двигуна. Турбореактивний двигун містить датчик швидкості (не представлений), який компресор 1 низького тиску і компресор 2 високого вимірює швидкість обертання ротора, який тиску, який подає стиснене повітря в камеру 3 входить до складу турбіни. згоряння для забезпечення беззупинного згоряння Як дуже схематично показано на Фіг.1, палива. Гази під високим тиском і з високою система виявлення ушкодження згідно з температурою виходять з високою швидкістю винаходом містить систему 22 обробки даних. До через реактивне сопло (не показане). Компресори складу цієї системи 22 звичайним образом приводяться в дію турбіною 4, яка забирає частину входить блок 23 інтерфейсу, який одержує енергії стиснутого газу і перетворює її в тепло і цифрові дані від датчиків і передає їх у механічну енергію. Кожен компресор містить обертову частину, чи запам'ятовуюче пристрій (ЗП) 25 для обробки цих ротор 5, нерухому частину, чи статор 6, і оболонку, даних центральним блоком (ЦБ) 24. Система чи корпус 7. Ротор містить барабан, який 9 82462 10 датчиків. Довжини векторів V1 і V2 пропорційні обробки зв'язана з екраном і/чи з принтером, що їхнім модулям А1 і А2, а кути, які вони складають з розташовані, наприклад, у кабіні літального головної (координатної) віссю, відповідають їх апарата. На Фіг.2А-2С представлений приклад даних, фазам φ1 і j2. які записані згідно з винаходом у ЗП 25 під час На кроці 30 (цив. також Фіг.5) вектори вібрації, польоту. Таким чином, ЗП 25 є засобом які відповідають даним від кожного датчика нагромадження даних, що характеризують вібрації, параметризуют у функції швидкості швидкість обертання ротора, а також амплітуду і обертання ротора. Після цього діапазон швидкості фазу його вібрації, для їхньої обробки за обертання ротора розбивають на безліч інтервалів результатамиФіг.2А представлена залежність 32 Так, на польоту. швидкості обертання ротора і, відповідно, вектори швидкості N(t) обертання ротора від часу польоту вібрації групують за цими інтервалами.в секундах. У цьому прикладі швидкість віднесена Розбивка швидкості обертання ротора не чи приведена до номінальної швидкості і обов'язково виконується рівномірною, причому представлена у вигляді відносної швидкості (у %). кожен інтервал може складати від 1 до 10% Вібрація v(t) характеризується її амплітудою номінальної швидкості обертання ротора. Краще A(t), тобто максимальним відхиленням щодо робити більш дрібну розбивку для підвищених рівноважного положення, і частотою j(t). Таким швидкостей обертання ротора, тому що в цьому діапазоні вібрація є більш високою, і, отже, більш чином, амплітуда має розмірність довжини, яка високий ризик утрати лопаток. Як приклад, для виражена тут у мікрометрах чи мілах, тобто поданих швидкостей обертання ротора від 80% до тисячних частках дюйма, а частота може бути 110% можна вибирати інтервали розбивки виражена в радіанах чи градусах у секунду. У розміром 1%. При цьому доцільно збільшити розмір загальному вигляді вібрація виражається як інтервалів на низьких швидкостях і навіть забрати комплексна змінна з модулем A(t) і аргументом j(t) нижню частину діапазону швидкості, щоб не у радіанах по формулі перевантажувати пам'ять і не витрачати час на v(t)=A(t)exp(ij(t)). обробку даних. Так наприклад, можна виконати Таким чином, у кожний даний момент вібрація розбивку з кроком у 2% чи більше для швидкостей характеризується амплітудою і фазою чи кутом. обертання ротора в області нижче 80% і усунути Приклади за Фіг.2В і 2С представляють, область нижче 20%. відповідно, амплітуду і фазу вібрації, На Фіг.5 показаний приклад розподілу зареєстровані в ході контрольованого польоту. амплітуд (у мілах) векторів, які визначені за Фіг.2В показує зміну амплітуди A(t) у мілах у даними датчиків, у функції поданої швидкості функції часу в секундах. Перша крива 34а A1(t) обертання ротора. представляє дані, які вимірині першим датчиком На кроці 40 обчислюють координати 12а вібрації. Друга крива 34b A2(t) представляє середнього вектора вібрації для кожного дані, які вимірині другим датчиком 12b вібрації. інтервалу швидкостей і для кожного датчика. Фіг.2С показує зміну фази j(t) у градусах у Фіг.6А представляє приклад скупчення функції часу в секундах. Перша крива 36а срази (групування) крапок, які представляють декартові j1(t) представляє дані, вимірині першим датчиком координати кінців векторів вібрації, які 12а вібрації. Друга крива 36b фази j1(t) контрольовані за даними від першого датчика для представляє дані, обмірювані другим датчиком обраного інтервалу швидкостей. Зокрема, на цій 12b Як приклад частота вимірів даних на Фіг.2А-2С вібрації. діаграмі представлені вектори вібрації в інтервалі складає 1с-1. швидкостей від 80% до 82% номінальної Фіг.3-9В ілюструють спосіб виявлення швидкості. Середній вектор вібрації в ушкодження ротора двигуна літального апарата обраному інтервалі може бути визначений шляхом згідно з винаходом. обчислення центра ваги скупчення крапок. Варто На Фіг.3 приведена органиграмма, чи блоквідмітити, що якщо число крапок, які схема, яка ілюструє спосіб виявлення ушкодження представляють координати векторів, мале, то для за результатами контрольованого польоту. Спосіб підвищення якості аналізу доцільно не здійснюється з використанням програм, які враховувати ці крапки. Подібним же чином Фіг.6В представляє записані у ЗП 25 системи 22 обробки. Процес декартові координати векторів вібрації, які запускається (операція, чи крок 10) зчитуванням контрольовані за даними від другого датчика, а даних, які характеризують швидкість обертання, також середній вектор вібрації в обраному амплітуду і фазу вібрації ротора, які записані у ЗП інтервалі швидкостей. 25 під час польоту. На кроці 50 середній вектор, який представляє Таким чином, по закінченні кожного польоту кожен інтервал і кожен датчик, записують у центральний блок ЦБ зчитує дані, які пам'ять. характеризують швидкість обертання ротора Починаючи з кроку 50, зміну цих векторів (Фіг.2А), а також амплітуди (Фіг.2В) і фази (Фіг.2С) аналізують за допомогою виконання кроків 61-81 вібрації, які зібрані різними засобами виміру. і/чи кроків 62-82. На кроці 20 вібрація в момент t виражається Так, на кроці 61 для кожного інтервалу вектором V вібрації, який визначається за швидкостей і для кожного датчика обчислюють значеннями амплітуди A(t) і срази j(t) вібрації різницю D векторів між середнім вектором ротора в даний момент t. контрольного (еталонного) польоту і середнім Фіг.4 зображує в полярних координатах вектором контрольованого польоту, - зрозуміло, миттєву діаграму векторів V1 і V2 вібрації, які для одного і того ж інтервалу швидкостей. Слід отримані, відповідно, від першого і другого 11 82462 12 раніше на кроці 30, в обраному інтервалі зазначити, що середні вектори , які швидкостей. Таким чином, у цьому інтервалі представляють різні інтервали швидкостей швидкостей обчислюють різницю векторів між контрольного польоту, попередньо записані в ЗП кожним вектором V1 чи V2 вібрації (який 25 системи 22 обробки (див. Фіг.1). визначено на кроці 30) контрольованого польоту і Контрольний політ може відповідати польоту, середнім вектором чи вібрації (який який передував контрольованому польоту. В попередньо записано у пам'ять) контрольного альтернативному варіанті контрольний політ може польоту для того самого інтервалу швидкостей відповідати польоту, який зв'язаний зі стандартним обертання ротора. контрольним двигуном, - наприклад, двигуном, Слід зазначити, що на кроці 62 також можна який використовується для проведення іспитів. обчислити різницю векторів між кожним вектором Фіг.7А ілюструє перебування різниці D1 вібрації (контрольованим на кроці 30) векторів між середнім вектором контрольованого польоту і середнім вектором контрольного польоту, наприклад, попереднього вібрації (який записано у пам'ять на кроці 50) цього польоту, і середнім вектором ж контрольованого польоту для того ж інтервалу контрольованого польоту, тобто останнього швидкостей обертання ротора. польоту, на базі даних, які записані у пам'яті і Далі, на кроці 72 обчислюють модуль різниці зв'язані з першим датчиком. У такий же спосіб векторів, яка зв'язана з кожним вектором вібрації, і Фіг.7В представляє обчислення різниці D2 векторів визначають максимальний модуль dmax1 чи стосовно до другого датчика. різниця векторів, яка У тому випадку, якщо ця dmax2. Потім, на кроці 82, максимальний модуль, обчислена на кроці 61, виходить за межі критичної тобто модуль найбільшої різниці векторів в зони навколо координат кінця контрольного аналізованому інтервалі швидкостей записують у середнього вектора, то можна діагностувати, що пам'ять. ротор піддався ушкодженню, наприклад, поломці Після цього на кроці 90 порівнюють лопатки. найбільший модуль в аналізованому інтервалі На Фіг.8 зображено коло, координати центра швидкостей з попередньо заданою граничною якого збігаються з координатами кінця середнього величиною.випадку, коли найбільший модуль (який У тому контрольного вектора , а радіус відповідає записано у пам'ять на кроці 82) чи модуль різниці попередньо заданому значенню, яке залежить від векторів (який записано у пам'ять на кроці 81) положення датчика. Таким чином, якщо різниця перевищує попередньо задану граничну величину векторів виходить за межі зони, яка обумовлена сигнал тривоги подається на екран чи на принтер у цим колом 3, можна вважати, що має місце кабіні для залучення уваги технічного персоналу. ушкодження ротора. Для спрощення критерію При цьому повинно бути зроблено відповідне вибору можна обчислити модуль різниці векторів обстеження двигуна перед його повторним для його порівняння з попередньо заданою запуском. З іншого боку, якщо найбільший модуль чи граничною величиною. модуль різниці векторів не перевищує попередньо Таким чином, на кроці 71 обчислюють модуль заданої граничної величини, роблять відновлення d кожної різниці D середніх векторів для кожного середніх векторів контрольного польоту на базі інтервалу швидкостей. Потім на кроці 81 даних контрольованого польоту для оцінки записують у пам'ять значення цих модулів. нормальної зміни двигуна. Далі на кроці 90 порівнюють модуль d різниці Може бути також передбачено, що дані, які векторів з попередньо заданою граничною характеризують швидкість обертання і вібрації величиною. Ця гранична величина може лежати в ротора, зберігають на знімному носії даних для інтервалі, наприклад, від 50 до 125мкм (від 2 до наступної обробки цих даних комп'ютером на 5міл). землі після посадки літального апарата. На практиці датчик вібрації більш чуттєвий до Спосіб виявлення ушкодження ротора двигуна дисбалансу компресора, ніж до дисбалансу літального апарата, який містить описані вище турбіни. Крім того, чутливість датчиків залежить операції і який виконується за результатами також від режиму двигуна. контрольованого польоту, дає особливі переваги, Як приклад, чутливість датчика коливається що полягають у тому, що увага пілота не приблизно від 200см×г/міл до 300см×г/міл, тобто відволікається на несуттєві проблеми. Інша миттєвий дисбаланс, який складає приблизно перевага полягає в тому, що не вибувається 200см×г, відповідаєамплітуді вібрації в 1міл перевантаження керуючої бортової системи (25мкм). літального апарата. дійсного винаходу цілком За допомогою У загальному випадку поломка лопатки можливо також виявляти ушкодження ротора в викликає дисбаланс, приблизно рівний 2000см×г. ході польоту за допомогою способу, який подібен Таким чином, з врахуванням нормального до способу за Фіг.3. залишкового дисбалансу і різної чутливості Операції блок-схеми, яка показана на Фіг.10 і датчиків поломка лопатки відповідає зміні яка відповідає даному варіанту способу, подібні до амплітуди вібрації в межах від 50 до 125мкм (від 2 операцій (кроків), які показані на Фіг.3, за винятком до 5міл). Слід зазначити, що діапазон коливань того, що спосіб запускається на кроці 110 граничної величини може змінюватися в зчитуванням у режимі реального часу даних, які залежностібуде описаний процес обчислення Далі від моделі двигуна. характеризують швидкість обертання ротора, а статистичного розкиду векторів з посиланнями на також амплітуду і фазу його вібрації. На кроці 120 операції 62-82. Так, на кроці 62 (див. також Фіг.9А і вібрацію виражають за допомогою вектора, який 9В) обчислюють середньоквадратичне векторне визначають стосовно до обраного інтервалу відхилення кожного вектора, який визначено 13 82462 14 ході польоту, збагачуючись наступними даними. швидкостей обертання ротора (крок 130). На На кроці 150 кожен обчислений середній вектор відміну від способу за Фіг.3, на кроці 140 записують у пам'ять, замість середнього вектора, координати середнього вектора вібрації для який раніше записано для того ж інтервалу обраного інтервалу швидкостей обчислюють на швидкостей. Всі інші операції подібні тим, що були основі часткових даних, які зібрані на кроці 110. описані вище в способі за Фіг.3. Таким чином, середній вектор може змінюватися в 15 82462 16 17 Комп’ютерна верстка М. Мацело 82462 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and system for detecting damage to the rotor of an aircraft engine
Автори англійськоюComperat Patrick, Even Philippe
Назва патенту російськоюСпособ и система для выявления повреждения ротора двигателя летательного аппарата и двигатель летательного аппарата
Автори російськоюКомпера Патрик, Еван Филипп
МПК / Мітки
МПК: G01M 1/22, G01H 1/00, F01D 21/00
Мітки: апарата, система, двигуна, спосіб, ушкодження, ротора, літального, виявлення, двигун
Код посилання
<a href="https://ua.patents.su/9-82462-sposib-i-sistema-dlya-viyavlennya-ushkodzhennya-rotora-dviguna-litalnogo-aparata-i-dvigun-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб і система для виявлення ушкодження ротора двигуна літального апарата і двигун літального апарата</a>
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата
Номер патенту: 76129
Опубліковано: 17.07.2006
Автор: Єрмоленко Іван Миколайович
МПК: F02K 9/80, F02K 9/50, F02K 9/56, F02K 9/46, F02K 7/00
Мітки: згоряння, палива, літального, подачі, камеру, двигуна, спосіб, компонентів, апарата
Формула / Реферат:
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата, що включає витіснення компонентів палива з паливних баків по трубопроводах їхньої подачі в камеру згоряння двигуна, який відрізняється тим, що в паливних порожнинах в процесі подачі компонентів палива в камеру згоряння двигуна створюють керований обертальний рух компонентів палива, наприклад в трубопроводах їхньої подачі за рахунок протікання компонентів палива...
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата
Номер патенту: 74847
Опубліковано: 15.02.2006
Автор: Єрмоленко Іван Миколайович
Мітки: спосіб, згоряння, компонентів, двигуна, літального, камеру, палива, подачі, апарата
Формула / Реферат:
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата, що включає витіснення компонентів палива з паливних баків під дією газів, що подаються в паливні баки, який відрізняється тим, що гази подають у напрямку, тангенціальному до циліндричної бокової поверхні паливних баків.
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Снагіцький Сергій Володимирович
МПК: B64G 1/24
Мітки: швидкостей, вісесиметричного, система, апарата, космічного, кутових, демпфірування, літального
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Бандура Іван Миколайович, Колесников Геннадій Викторович
МПК: B64G 1/24
Мітки: літального, апарата, космічного, демпфірування, швидкостей, система, кутових
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Шапранов Ілля Володимирович
МПК: B64G 1/24
Мітки: гасіння, літального, апарата, система, швидкостей, вісесиметричного, початкових, кутових, космічного
Формула / Реферат:
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Попередній патент: Машина для прокладки контактної мережі
Наступний патент: Спосіб визначення силіцію у водному середовищі
Випадковий патент: Прес безперервної дії