Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 89602
Опубліковано: 25.04.2014
Автори: Пилипенко Олег Вікторович, Горєв Микола Борисович, Доронін Олексій Володимирович, Привалов Євген Миколайович, Коджеспірова Інна Федорівна


Формула / Реферат
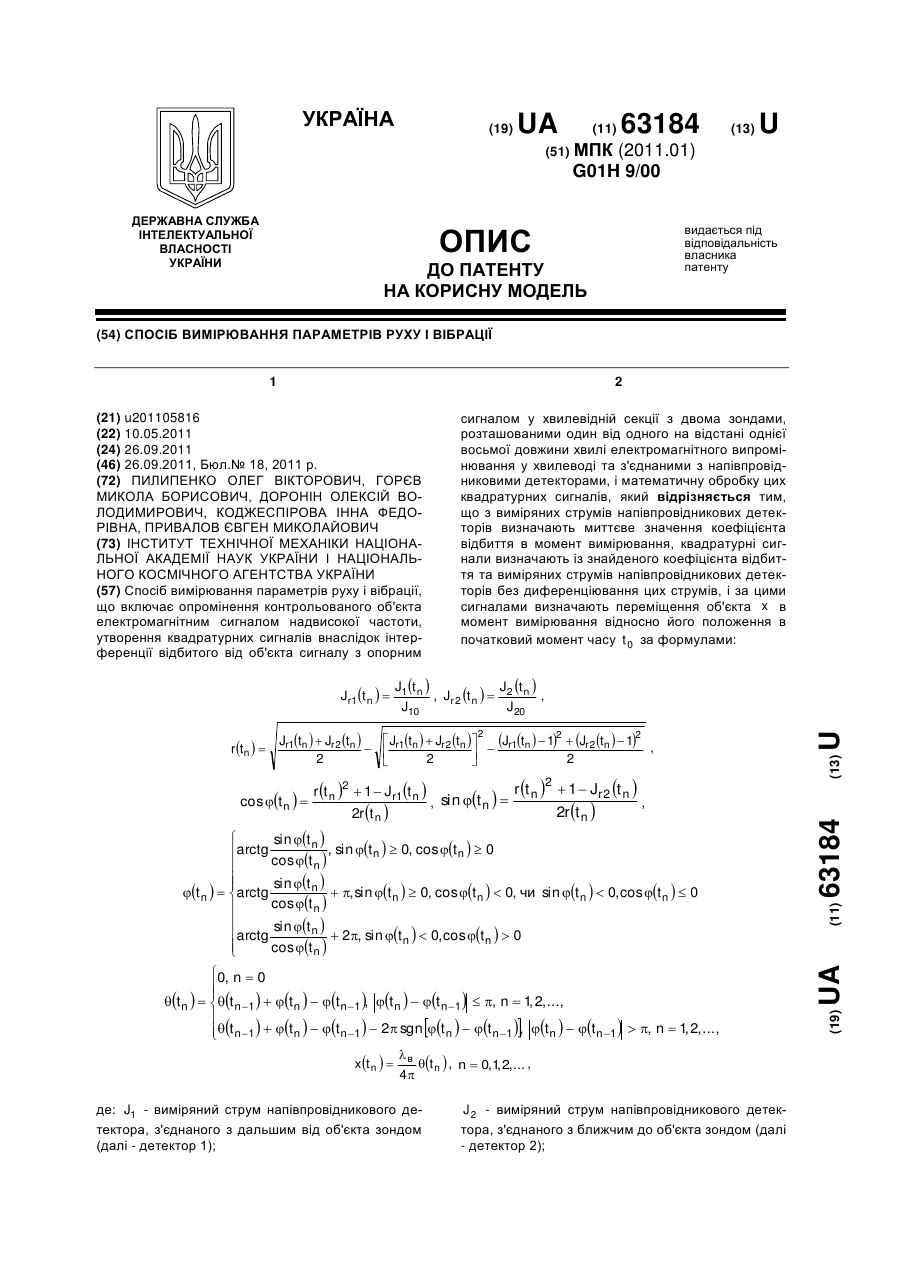
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, з'єднаними з напівпровідниковими детекторами, і визначення переміщення об'єкта x в момент вимірювання відносно його положення в початковий момент часу t0 за формулами:

![]()
де j - нерозгорнута фаза;
q - розгорнута фаза;
t0, t1, t2,...., tn,... - моменти вимірювань;
n = 0,1,2,... - номер вимірювання;
lв - довжина хвилі електромагнітного випромінювання генератора у вільному просторі;
причому cos j(tn), який входить в вирази для визначення переміщення, знаходиться зі струмів напівпровідникових детекторів та визначеного за цими струмами ефективного коефіцієнта відбиття як:
![]()
де Jr1 - струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом, нормований на його значення в режимі біжучої хвилі;
ref - ефективний коефіцієнт відбиття об'єкта, що визначається як менший додатний корінь біквадратного рівняння, якому задовольняє дійсний коефіцієнт відбиття r;
який відрізняється тим, що зонди розташовані один від одного на відстані однієї десятої довжини хвилі електромагнітного випромінювання у хвилеводі; біквадратне рівняння, якому задовольняє дійсний коефіцієнт відбиття r, має вигляд

де Jr2 - струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом, нормований на його значення в режимі біжучої хвилі; і sinj(tn), який входить в вирази для визначення переміщення, знаходиться зі струмів напівпровідникових детекторів та визначеного за цими струмами ефективного коефіцієнта відбиття як:
![]()
Текст
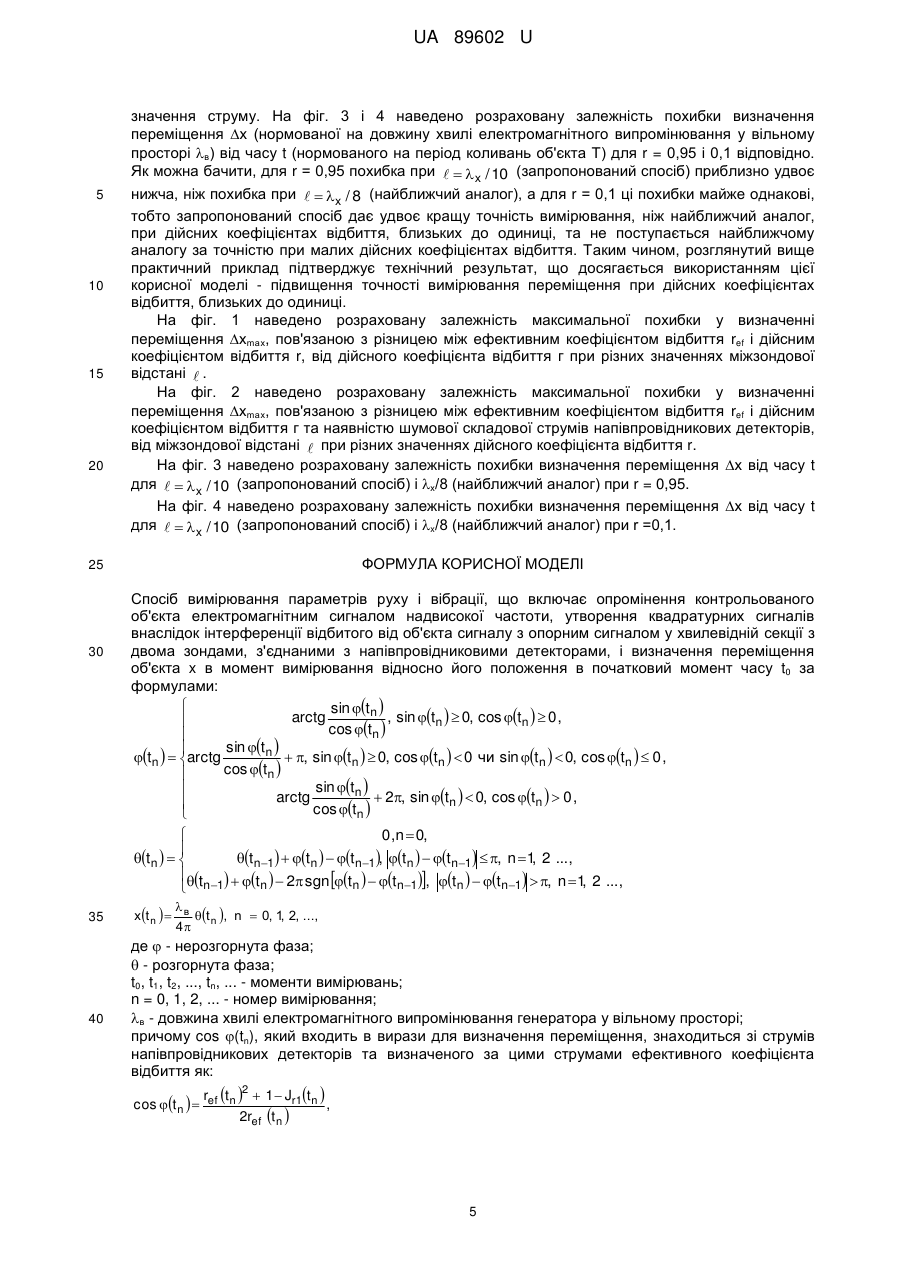
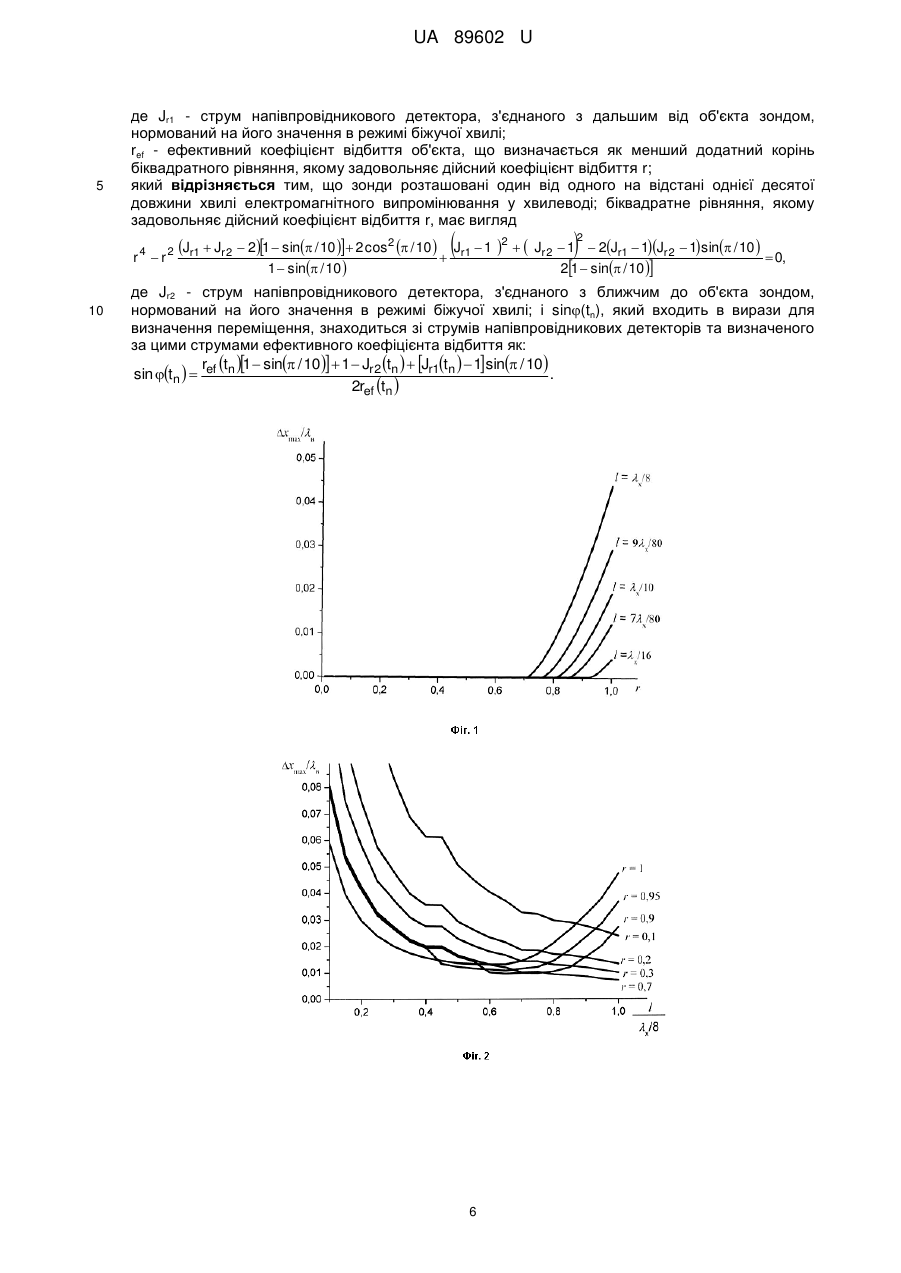
Реферат: Спосіб вимірювання параметрів руху і вібрації включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, з'єднаними з напівпровідниковими детекторами, і визначення переміщення об'єкта x в момент вимірювання відносно його положення в початковий момент. Зонди розташовані один від одного на відстані однієї десятої довжини хвилі електромагнітного випромінювання у хвилеводі; біквадратне рівняння, якому задовольняє дійсний коефіцієнт відбиття. UA 89602 U (12) UA 89602 U UA 89602 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки, зокрема до засобів вимірювання параметрів вібрації. Для побудови вимірювачів параметрів руху, зокрема вібрацій досить привабливим є застосування радіохвильових методів. Це зумовлене цілою низкою причин, найбільш вагомими з яких є безінерційність і відсутність механічного контакту з контрольованим об'єктом. Одним з поширених радіохвильових методів є інтерференційний метод (Викторов В. А. Радиоволновые измерения параметров технологических процессов / В.А.Викторов, Б.В.Лункин, А.С.Совлуков. – М.: Энергоатомиздат, 1989. - 208 с). В основі цього методу лежить визначення параметрів руху за зсувом фази між електромагнітною хвилею, відбитою від контрольованого об'єкта, і зондуючою електромагнітною хвилею. Цей зсув фаз можна визначній з двох квадратурних сигналів. На цей час звичайним способом формування таких сигналів є застосування спеціальних пристроїв, до числа яких входить подільник потужності та аналоговий або цифровий квадратурний змішувач (Kim S. A displacement measurement technique using millimeterwave interferometry / S. Kim, С Nguyen // IEEE Transactions on Microwave Theory and Techniques. 2003. - V. 51, No 6. - P. 1724-1728; Kim S. On the development of a multifunction millimeter-wave sensor for displacement sensing and low-velocity measurement / S. Kim, C. Nguyen // IEEE Transactions on Microwave Theory and Techniques. - 2004. - V. 52, No 11. - P. 2503-2512). Однак це призводить до ускладнення конструкції; крім того, при цьому треба вживати заходи для мінімізації нелінійності фазової характеристики квадратурного змішувача, зумовленої розбалансом фаз та амплітуд. Ці недоліки усунено в способі вимірювання параметрів руху і вібрації (Патент України на корисну модель № 63184, МПК G01H9/00. Спосіб вимірювання параметрів руху і вібрації; опубл. 26.09.2011, Бюл. № 18), апаратна реалізація якого набагато простіша. В цьому способі об'єкт, що вібрує, зондується електромагнітними хвилями діапазону надвисоких частот (НВЧ). Відбитий від об'єкта сигнал інтерферує із зондуючим сигналом в хвилевідній секції, що містить два зонди, розташовані один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання в хвилеводі. З цими зондами з'єднані напівпровідникові детектори. Зі струмів цих напівпровідникових детекторів спочатку визначається коефіцієнт відбиття об'єкта, а потім зі струмів напівпровідникових детекторів та знайденого за ними коефіцієнта відбиття визначаються два квадратурні сигнали і переміщення об'єкта знаходиться з цих квадратурних сигналів за алгоритмом, наведеним в (Сильвиа М.Т. Обратная фильтрация геофизических временных рядов при разведке на нефть и газ / М.Т.Сильвиа, Э.А. Робинсон. - М.: Недра, 1983. - 447 с). Однак формула, що виражає коефіцієнт відбиття через виміряні струми напівпровідникових детекторів, є чинною тільки для коефіцієнтів відбиття, які не перевищують 1 . Це обмежує область застосовності цього способу, тому що при невеликих відстанях між 2 об'єктом та антеною коефіцієнт відбиття може бути близьким до одиниці. Найбільш близьким аналогом є спосіб вимірювання параметрів руху і вібрації (Патент України на корисну модель №80300, МПК G01H9/00. Спосіб вимірювання параметрів руху і вібрації, опубл. 27.05.2013, Бюл. № 10). На відміну від зазначеного вище способу вимірювання параметрів руху і вібрації (Патент України на корисну модель №63184, МПК G01H9/00. Спосіб вимірювання параметрів руху і вібрації; опубл. 26.09.2011, Бюл. № 18.), який є застосовним тільки для коефіцієнтів відбиття, що не перевищують 1 , найближчий аналог дозволяє 2 вимірювати переміщення об'єкта при довільному коефіцієнті відбиття. В найближчий аналог з біквадратного рівняння, яке пов'язує дійсний коефіцієнт відбиття зі струмами напівпровідникових детекторів, що з'єднані із двома установленими в хвилевідній секції зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання в хвилеводі, знаходиться ефективний коефіцієнт відбиття як менший додатний корінь цього рівняння і квадратурні сигнали, які потрібні для обчислення переміщення об'єкта за алгоритмом, наведеним в (Сильвиа М.Т. Обратная фильтрация геофизических временных рядов при разведке на нефть и газ. - М. : Недра, 1983. - 447 с.), визначаються зі струмів напівпровідникових детекторів та знайденого за цими струмами ефективного коефіцієнта відбиття. Однак недоліком найближчого аналога є те, що оскільки при дійсних коефіцієнтах відбиття, близьких до одиниці, ефективний коефіцієнт відбиття може не співпадати з дійсним коефіцієнтом відбиття, у вимірюванні переміщення може виникати похибка. При вимірюваннях за найближчим аналогом максимальна величина цієї похибки становить близько 4,4 % від довжини хвилі зондуючого електромагнітного випромінювання у вільному просторі в, тобто при роботі на частоті 10 ГГц (в = 3 см) максимальна похибка (яка досягається при дійсному коефіцієнті відбиття, що дорівнює одиниці) становить близько 1,3 мм. 1 UA 89602 U 5 Технічною задачею, на вирішення якої направлена корисна модель, є зниження похибки визначення відносного переміщення, пов'язаної з різницею між ефективним та дійсним коефіцієнтом відбиття. У відповідності зі сказаним вище, технічний результат, що досягається при здійсненні корисної моделі, полягає в підвищенні точності вимірювань при дійсних коефіцієнтах відбиття, близьких до одиниці. Поставлена задача вирішується у способі, що полягає у відмові від вимоги, щоб міжзондова відстань становила одну восьму довжини хвилі зондуючого електромагнітного випромінювання, та розгляді випадку довільної міжзондової відстані. Хай міжзондова відстань дорівнює . Тоді дійсний коефіцієнт відбиття об'єкта r задовольняє такому біквадратному рівнянню: r4 r2 10 J Jr1 Jr 2 21 sin 2 cos2 r1 1 15 20 1 sin 2 Jr 2 1 2Jr1 1Jr 2 1sin 0,. 21 sin 2 x / 8 де ; 2 x / 8 х - довжина хвилі зондуючого електромагнітного випромінювання у хвилеводі; Jr1 - струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом, який нормовано на його значення в режимі біжучої хвилі; Jr2 - струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом, який нормовано на його значення в режимі біжучої хвилі. Це рівняння має два додатні корені, один з яких є дійсним коефіцієнтом відбиття, а другий є побічним коренем. Введемо, як і у найближчому аналозі, ефективний коефіцієнт відбиття об'єкта ref, який тепер визначатиметься як менший додатний корінь наведеного вище біквадратного рівняння, і будемо знаходити переміщення об'єкта з використанням цього ефективного коефіцієнта відбиття. Тоді, як і у найближчому аналозі, переміщення об'єкта χ в момент вимірювання tn, n = 0,1,2,..., відносно його положення в початковий момент часу t0 буде визначатися за формулами: sin t n arctg , sin t n 0, cos t n 0 , cos t n sin t n t n arctg , sin t n 0, cos t n 0 чи sin t n 0, cos t n 0 , cos t n sin t n arctg 2, sin t n 0, cos t n 0 , cos t n 25 0 , n 0, t n t n1 t n t n1 , t n t n1 , n 1 2 ... , , t t 2 sgn t t , t t , n 1, 2 ... , n n n1 n n1 n1 в t n , n 0, 1 2, ..., , 4 де - нерозгорнута фаза; θ - розгорнута фаза; в - довжина хвилі електромагнітного випромінювання генератора у вільному просторі; і cos(tn) буде знаходитися зі струмів напівпровідникових детекторів J r1 і Jr2 та визначеного за ними ефективного коефіцієнта відбиття ref як xt n 30 r t 2 1 Jr1t n cos t n ef n , 2ref t n 35 але, на відміну від найближчого аналога, наведене вище біквадратне рівняння, якому задовольняє дійсний коефіцієнт відбиття r і менший додатний корінь якого дає ефективний коефіцієнт відбиття ref буде мати інший вигляд, ніж у найближчому аналозі, і sin(tn) буде знаходитися зі струмів напівпровідникових детекторів Jr1 і Jr2 та визначеного за ними ефективного коефіцієнта відбиття ref як: sin tn ref tn 2 1 sin 1 Jr 2 tn Jr1tn 1sin . 2ref tn 2 UA 89602 U На фіг. 1 наведено залежність максимальної похибки у визначенні переміщення хmах, що виникає при цьому, від дійсного коефіцієнта відбиття r при різних значеннях міжзондової відстані : x / 8 (як у найближчому аналозі), 5 10 15 20 25 0,9x / 8 9x / 80 , 0,8x / 8 x / 10 , 0,7x / 8 7x / 80 , i 0,5x / 8 9x / 16 . Як видно з фіг. 1, похибка визначення переміщення має місце при дійсних коефіцієнтах відбиття, близьких до одиниці, і вона швидко зменшується зі зменшенням міжзондової відстані. Але на практиці міжзондову відстань можна зменшувати лише до певної границі. Справа в тому, що при зменшенні міжзондової відстані значення струмів напівпровідникових детекторів наближаються одне до одного, в результаті чого зростає похибка у визначенні переміщення об'єкта, зумовлена похибкою у струмах напівпровідникових детекторів, зокрема через наявність шумів. Тому раціональним значенням міжзондової відстані є таке, при якому, з одного боку, зменшується похибка, зумовлена різницею між ефективним та дійсним коефіцієнтом відбиття, а з іншого боку, похибка, зумовлена шумами струмів напівпровідникових детекторів, ще є незначною. Для визначення цього раціонального значення було проведене комп'ютерне моделювання процесу вимірювання переміщення об'єкта при різних значеннях міжзондової відстані та дійсного коефіцієнта відбиття. Моделювалося визначення переміщення об'єкта, який здійснює гармонійні коливання з амплітудою А, що перевищує довжину хвилі електромагнітного випромінювання у вільному просторі в (A=2,5в). При моделюванні вважалося, що струми напівпровідникових детекторів містять шумову компоненту, що приймає випадкове значення в межах ±3% від поточного розрахункового значення струму. Результати моделювання представлено на фіг. 2, де наведено залежність максимальної похибки у визначенні переміщення хmах від міжзондової відстані (нормованої на x / 8 ) при різних значеннях дійсного коефіцієнта відбиття об'єкта r. Як видно з фіг. 2, за таке раціональне значення міжзондової відстані можна вибрати 0,8 x / 8 x / 10 , при якому у порівнянні з x / 8 похибка хmax зменшується більш ніж удвічі для дійсних коефіцієнтів відбиття, близьких до одиниці (r = 1; 0,95; 0,9) та лишається приблизно такою ж самою, тобто не погіршується, для менших дійсних коефіцієнтів відбиття (r = 0,7; 0,3; 0,2; 0,1). Саме таке значення міжзондової відстані й використане у способі, що пропонується в цій корисній моделі. При цьому значенні x / 10 x / 8 , і тому біквадратне рівняння, якому 2 x / 8 10 задовольняє дійсний коефіцієнт відбиття r і менший додатний корінь якого дає ефективний коефіцієнт відбиття ref, стає таким: міжзондової 30 r4 r2 J відстані Jr1 Jr 2 21 sin / 10 2 cos2 / 10 1 sin / 10 r1 1 2 Jr 2 1 2Jr1 1Jr 2 1 sin / 10 0,. 21 sin / 10 2 і вираз для визначення sin (tn) набуває вигляду: ref tn 2 1 sin / 10 1 Jr 2 tn Jr1tn 1sin / 10 . 2ref tn Зі сказаного вище випливає, що суттєві ознаки цієї корисної моделі полягають в тому, що з'єднані з напівпровідниковими детекторами зонди розташовані один від одного на відстані однієї десятої довжини хвилі електромагнітного випромінювання у хвилеводі, біквадратне рівняння, менший додатний корінь якого дає ефективний коефіцієнт відбиття rеf, має вигляд: sin tn 35 r4 r2 J Jr1 Jr 2 21 sin / 10 2 cos2 / 10 1 sin / 10 r1 1 40 2 Jr 2 1 2Jr1 1Jr 2 1sin / 10 0, 21 sin / 10 2 і sin (tn) знаходиться зі струмів напівпровідникових детекторів J r1 і Jr2, та визначеного за ними ефективного коефіцієнта відбиття rеf як ref tn 2 1 sin / 10 1 Jr 2 tn Jr1tn 1sin / 10 . 2ref tn Сукупність цих суттєвих ознак забезпечує досягнення зазначеного технічного результату, а саме підвищення точності вимірювань при дійсних коефіцієнтах відбиття, близьких до одиниці. sin tn 3 UA 89602 U 5 Таким чином, зазначений технічний результат (підвищення точності вимірювань при дійсних коефіцієнтах відбиття, близьких до одиниці) досягається тим, що в способі вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, з'єднаними з напівпровідниковими детекторами, і визначення переміщення об'єкта x в момент вимірювання відносно його положення в початковий момент часу t0 за формулами: sin tn arctg , sin tn 0, cos tn 0 , cos tn sin tn tn arctg , sin tn 0, cos tn 0 чи sin tn 0, cos tn 0 , cos tn sin tn arctg 2, sin tn 0, cos tn 0 , cos tn 0 , n 0, tn tn1 tn tn1, tn tn1 , n 1 2 ... , , t t 2 sgn t t , t t , n 1 2 ... , , n n n1 n n1 n1 10 15 в tn , n 0, 1 2, ... , , 4 де - нерозгорнута фаза; - розгорнута фаза; t0, t1,t2,...., tn,..., - моменти вимірювань; n = 0,1,2,..., - номер вимірювання; в - довжина хвилі електромагнітного випромінювання генератора у вільному просторі; причому cos (tn), який входить в вирази для визначення переміщення, знаходиться зі струмів напівпровідникових детекторів та визначеного за цими струмами ефективного коефіцієнта відбиття як: xtn r t 2 1 Jr1tn cos tn ef n , 2ref tn 20 25 де Jr1 - струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом, нормований на його значення в режимі біжучої хвилі; ref - ефективний коефіцієнт відбиття об'єкта, що визначається як менший додатний корінь біквадратного рівняння, якому задовольняє дійсний коефіцієнт відбиття r; згідно з пропонованою корисною моделлю, зонди розташовані один від одного на відстані однієї десятої довжини хвилі електромагнітного випромінювання у хвилеводі; біквадратне рівняння, якому задовольняє дійсний коефіцієнт відбиття r, має вигляд: r4 r2 J Jr1 Jr 2 21 sin / 10 2 cos2 / 10 1 sin / 10 r1 1 30 2 Jr 2 1 2Jr1 1Jr 2 1sin / 10 0, 21 sin / 10 2 де Jr2 - струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом, нормований на його значення в режимі біжучої хвилі; і sin (tn), який входить в вирази для визначення переміщення, знаходиться зі струмів напівпровідникових детекторів та визначеного за цими струмами ефективного коефіцієнта відбиття як: ref tn 2 1 sin / 10 1 Jr 2 tn Jr1tn 1sin / 10 . 2ref tn Для підтвердження можливості здійснення цієї корисної моделі було проведене комп'ютерне моделювання процесу вимірювання переміщення об'єкта згідно з запропонованим способом ( x / 10 ). Як і при визначенні раціонального значення міжзондової відстані, моделювалося визначення переміщення об'єкта, що здійснює гармонійні коливання з амплітудою А, яка перевищує довжину хвилі електромагнітного випромінювання у вільному просторі в (A=2,5в), та при моделюванні вважалося, що струми напівпровідникових детекторів містять шумову компоненту, що приймає випадкове значення в межах ±3 % від поточного розрахункового sin tn 35 40 4 UA 89602 U 5 10 15 20 значення струму. На фіг. 3 і 4 наведено розраховану залежність похибки визначення переміщення х (нормованої на довжину хвилі електромагнітного випромінювання у вільному просторі в) від часу t (нормованого на період коливань об'єкта Т) для r = 0,95 і 0,1 відповідно. Як можна бачити, для r = 0,95 похибка при x / 10 (запропонований спосіб) приблизно удвоє нижча, ніж похибка при x / 8 (найближчий аналог), а для r = 0,1 ці похибки майже однакові, тобто запропонований спосіб дає удвоє кращу точність вимірювання, ніж найближчий аналог, при дійсних коефіцієнтах відбиття, близьких до одиниці, та не поступається найближчому аналогу за точністю при малих дійсних коефіцієнтах відбиття. Таким чином, розглянутий вище практичний приклад підтверджує технічний результат, що досягається використанням цієї корисної моделі - підвищення точності вимірювання переміщення при дійсних коефіцієнтах відбиття, близьких до одиниці. На фіг. 1 наведено розраховану залежність максимальної похибки у визначенні переміщення хmах, пов'язаною з різницею між ефективним коефіцієнтом відбиття ref і дійсним коефіцієнтом відбиття r, від дійсного коефіцієнта відбиття г при різних значеннях міжзондової відстані . На фіг. 2 наведено розраховану залежність максимальної похибки у визначенні переміщення хmах, пов'язаною з різницею між ефективним коефіцієнтом відбиття ref і дійсним коефіцієнтом відбиття г та наявністю шумової складової струмів напівпровідникових детекторів, від міжзондової відстані при різних значеннях дійсного коефіцієнта відбиття r. На фіг. 3 наведено розраховану залежність похибки визначення переміщення х від часу t для x / 10 (запропонований спосіб) і х/8 (найближчий аналог) при r = 0,95. На фіг. 4 наведено розраховану залежність похибки визначення переміщення х від часу t для x / 10 (запропонований спосіб) і x/8 (найближчий аналог) при r =0,1. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, з'єднаними з напівпровідниковими детекторами, і визначення переміщення об'єкта x в момент вимірювання відносно його положення в початковий момент часу t0 за формулами: sin tn arctg , sin tn 0, cos tn 0 , cos tn sin tn tn arctg , sin tn 0, cos tn 0 чи sin tn 0, cos tn 0 , cos tn sin tn arctg 2, sin tn 0, cos tn 0 , cos tn 0 , n 0, t n t n 1 tn t n 1, t n t n 1 , n 1 2 ... , , t t 2 sgn t t , t t , n 1 2 ... , , n n n 1 n n 1 n 1 35 40 xt n в t n , n 0, 1 2, ..., , 4 де - нерозгорнута фаза; - розгорнута фаза; t0, t1, t2, ..., tn, ... - моменти вимірювань; n = 0, 1, 2, ... - номер вимірювання; в - довжина хвилі електромагнітного випромінювання генератора у вільному просторі; причому cos (tn), який входить в вирази для визначення переміщення, знаходиться зі струмів напівпровідникових детекторів та визначеного за цими струмами ефективного коефіцієнта відбиття як: r t 2 1 Jr1tn cos tn ef n , 2ref tn 5 UA 89602 U 5 де Jr1 - струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом, нормований на його значення в режимі біжучої хвилі; ref - ефективний коефіцієнт відбиття об'єкта, що визначається як менший додатний корінь біквадратного рівняння, якому задовольняє дійсний коефіцієнт відбиття r; який відрізняється тим, що зонди розташовані один від одного на відстані однієї десятої довжини хвилі електромагнітного випромінювання у хвилеводі; біквадратне рівняння, якому задовольняє дійсний коефіцієнт відбиття r, має вигляд 4 r r 10 2 Jr1 Jr 2 21 sin / 10 2 cos 2 / 10 Jr1 1 2 1 sin / 10 Jr 2 1 2Jr1 1Jr 2 1sin / 10 0,. 21 sin / 10 2 де Jr2 - струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом, нормований на його значення в режимі біжучої хвилі; і sin(tn), який входить в вирази для визначення переміщення, знаходиться зі струмів напівпровідникових детекторів та визначеного за цими струмами ефективного коефіцієнта відбиття як: r t 1 sin / 10 1 Jr 2 tn Jr1tn 1sin / 10 sin tn ef n . 2ref tn 6 UA 89602 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюPylypenko Oleh Viktorovych, Horiev Mykola Borysovych, Doronin Oleksii Volodymyrovych, Kodzhespirova Inna Fedorivna, Pryvalov Yevhen Mykolaiovych
Автори російськоюПилипенко Олег Викторович, Горев Николай Борисович, Доронин Алексей Владимирович, Коджеспирова Инна Федоровна, Привалов Евгений Николаевич
МПК / Мітки
МПК: G01H 9/00
Мітки: параметрів, вимірювання, вібрації, руху, спосіб
Код посилання
<a href="https://ua.patents.su/9-89602-sposib-vimiryuvannya-parametriv-rukhu-i-vibraci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання параметрів руху і вібрації</a>
Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 80300
Опубліковано: 27.05.2013
Автори: Коджеспірова Інна Федорівна, Доронін Олексій Володимирович, Привалов Євген Миколайович, Горєв Микола Борисович, Пилипенко Олег Вікторович
МПК: G01H 9/00
Мітки: параметрів, вібрації, спосіб, вимірювання, руху
Формула / Реферат:
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі та з'єднаними з напівпровідниковими...
Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 63184
Опубліковано: 26.09.2011
Автори: Доронін Олексій Володимирович, Горєв Микола Борисович, Привалов Євген Миколайович, Коджеспірова Інна Федорівна, Пилипенко Олег Вікторович
МПК: G01H 9/00
Мітки: вібрації, спосіб, вимірювання, параметрів, руху
Формула / Реферат:
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі та з'єднаними з напівпровідниковими...
Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 55873
Опубліковано: 27.12.2010
Автори: Коджеспірова Інна Федорівна, Пилипенко Олег Вікторович, Горєв Микола Борисович, Привалов Євген Миколайович
МПК: G01H 9/00
Мітки: спосіб, вимірювання, вібрації, параметрів, руху
Формула / Реферат:
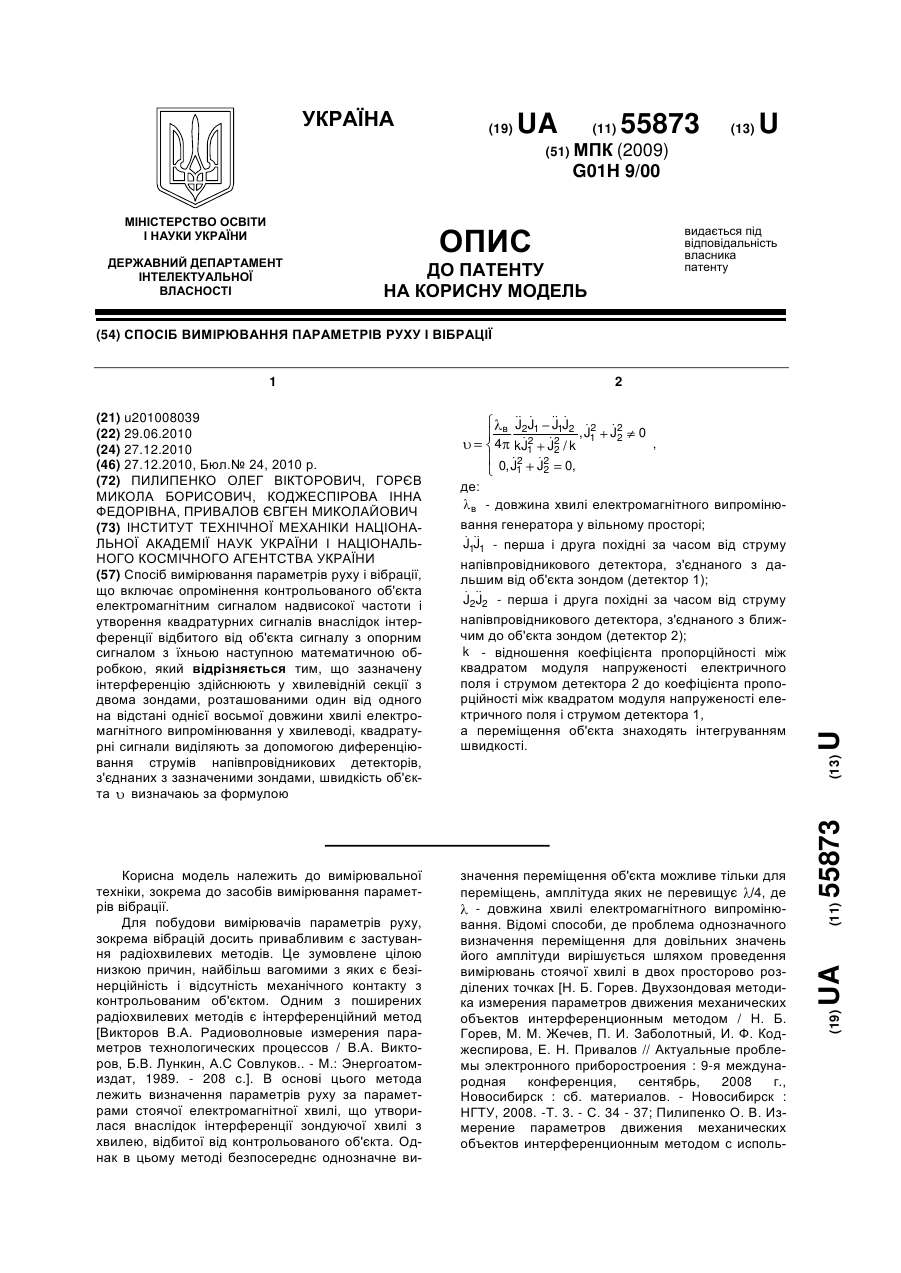
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти і утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом з їхньою наступною математичною обробкою, який відрізняється тим, що зазначену інтерференцію здійснюють у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої...
Спосіб вимірювання та контролю параметрів вібрації турбомашини
Номер патенту: 4721
Опубліковано: 15.02.2005
Автори: Жаріков Віталій Миколайович, Бойко Михайло Васильович, Гарагуль Анатолій Андрійович, Хвостов Костянтин Володимирович
МПК: G01M 7/02, G01M 7/00, G01H 11/00
Мітки: вібрації, спосіб, турбомашині, вимірювання, параметрів, контролю
Формула / Реферат:
Спосіб вимірювання та контролю параметрів вібрації турбомашин, за яким параметри вібрації вимірюють за допомогою датчиків віброприскорення, при цьому сигнали від датчиків віброприскорення перетворюють в цифрову форму, оброблюють за допомогою апаратно-програмного блоку, а результати відображаються в графічній формі на екрані дисплея апаратно-програмного блоку, який відрізняється тим, що вібраційні сигнали від датчиків віброприскорення або...
Пристрій вимірювання рівнів параметрів вібрації
Номер патенту: 60661
Опубліковано: 25.06.2011
Автори: Шантир Сергій Валерійович, Павлишин Микола Михайлович, Шантир Антон Сергійович, Шантир Діана Сергіївна
МПК: G01H 1/00
Мітки: рівнів, вимірювання, пристрій, вібрації, параметрів
Формула / Реферат:
Пристрій вимірювання рівнів параметрів вібрації, який містить віброперетворювач, перестроюваний фільтр, аналого-цифровий перетворювач, блок обчислень, перетворювач середньоквадратичного значення вихід якого з'єднаний із входом індикатора, який відрізняється тим, що додатково містить блок обчислення невизначеності та другий індикатор, причому вихід віброперетворювача з'єднаний зі входом перестроюваного фільтра, вихід якого з'єднаний зі входом...
Попередній патент: Пристрій для визначення знаку похідної пневматичного сигналу
Наступний патент: Пробіотик “субалін”
Випадковий патент: Пружина апарата поглинаючого