Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги
Номер патенту: 91641
Опубліковано: 10.07.2014
Автори: Потапов Антон Леонідович, Ромашихін Юрій Володимирович, Ткаченко Юрій Вікторович, Рєзнік Дмитро Володимирович, Родькін Дмитро Йосипович
Формула / Реферат
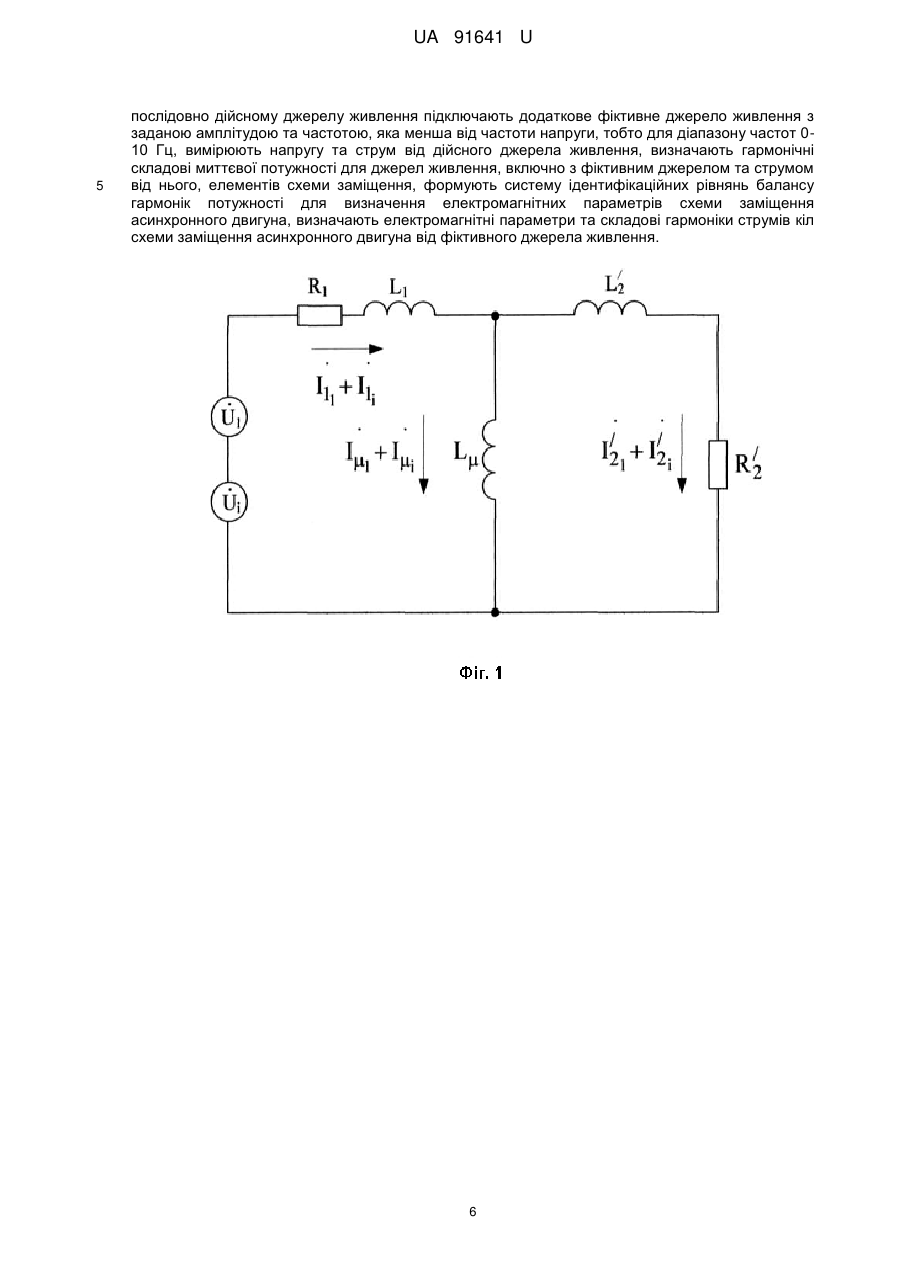
Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги, який полягає у підключенні дослідного асинхронного двигуна до джерела живлення, з використанням частот напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь балансу потужності джерела напруги та на елементах схеми заміщення асинхронного двигуна, визначенні електромагнітних параметрів асинхронного двигуна шляхом розв'язання системи ідентифікаційних рівнянь, який відрізняється тим, що в схему заміщення асинхронного двигуна послідовно дійсному джерелу живлення підключають додаткове фіктивне джерело живлення з заданою амплітудою та частотою, яка менша від частоти напруги, тобто для діапазону частот 0-10 Гц, вимірюють напругу та струм від дійсного джерела живлення, визначають гармонічні складові миттєвої потужності для джерел живлення, включно з фіктивним джерелом та струмом від нього, елементів схеми заміщення, формують систему ідентифікаційних рівнянь балансу гармонік потужності для визначення електромагнітних параметрів схеми заміщення асинхронного двигуна, визначають електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна від фіктивного джерела живлення.
Текст
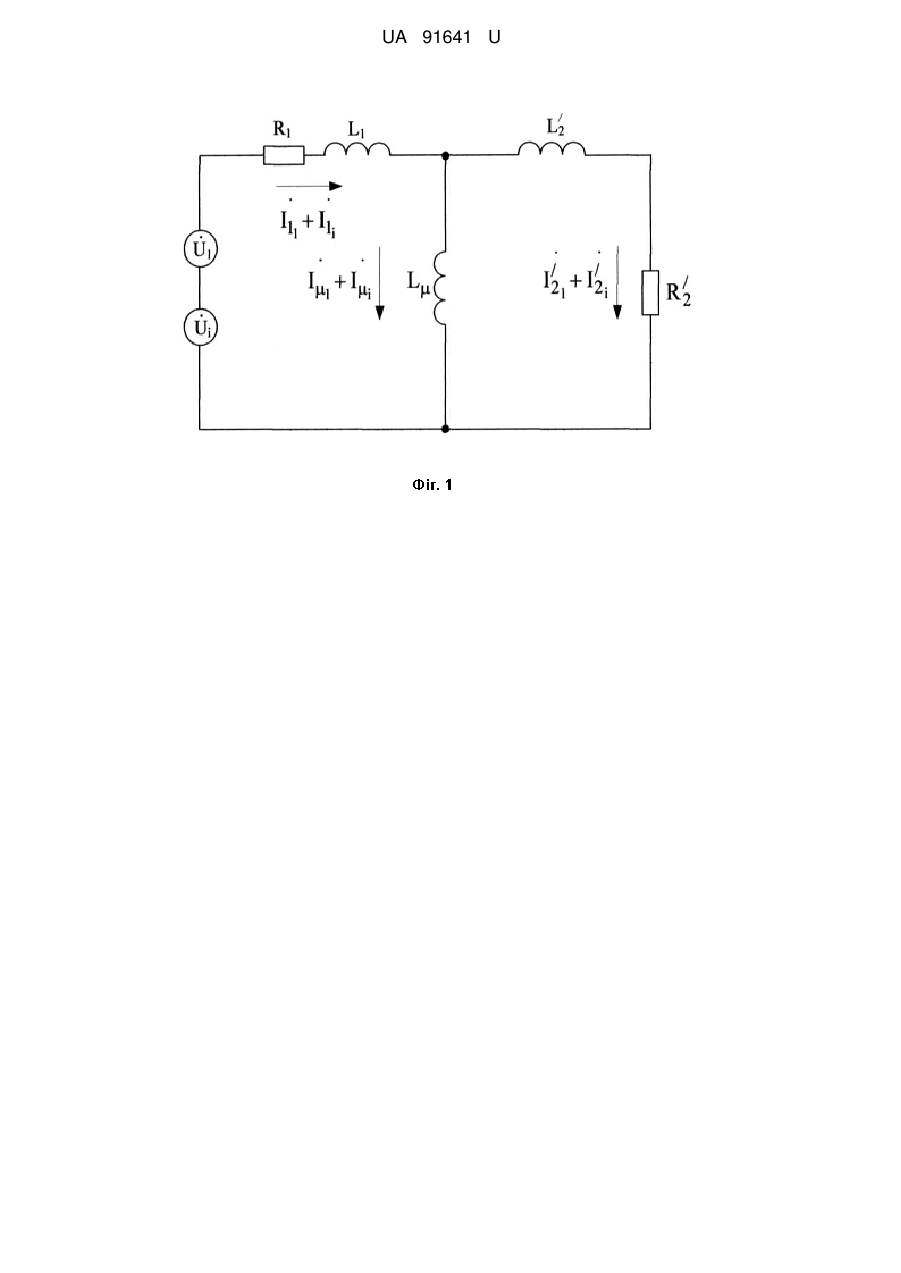
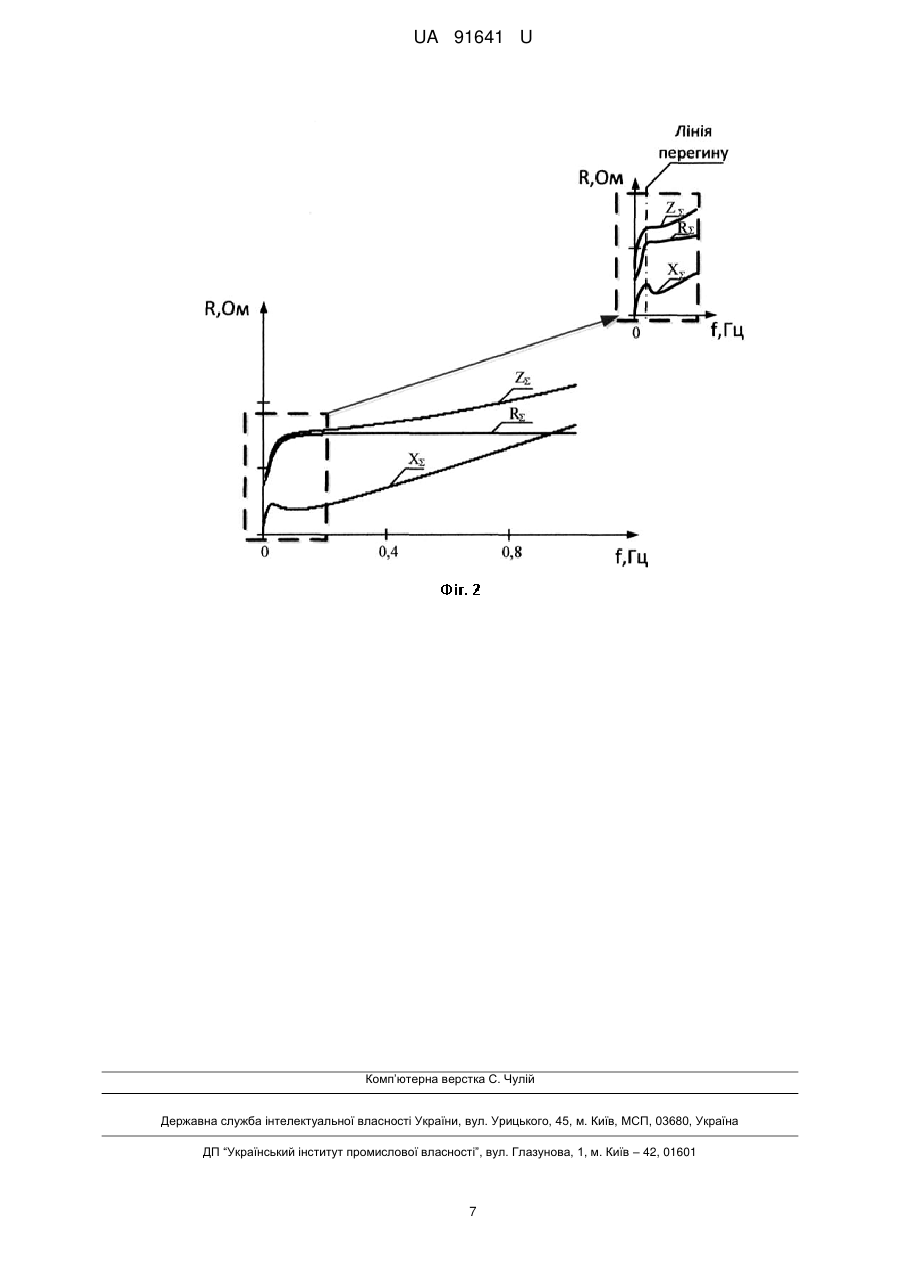
Реферат: Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги, який полягає у підключенні дослідного асинхронного двигуна до джерела живлення, з використанням частот напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь балансу потужності джерела напруги та на елементах схеми заміщення асинхронного двигуна, визначенні електромагнітних параметрів асинхронного двигуна шляхом розв'язання системи ідентифікаційних рівнянь, причому в схему заміщення асинхронного двигуна послідовно дійсному джерелу живлення підключають додаткове фіктивне джерело живлення з заданою амплітудою та частотою, яка менша від частоти напруги, тобто для діапазону частот 0-10 Гц, вимірюють напругу та струм від дійсного джерела живлення, визначають гармонічні складові миттєвої потужності для джерел живлення, включно з фіктивним джерелом та струмом від нього, елементів схеми заміщення, формують систему ідентифікаційних рівнянь балансу гармонік потужності для визначення електромагнітних параметрів схеми заміщення асинхронного двигуна, визначають електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна від фіктивного джерела живлення. UA 91641 U (12) UA 91641 U UA 91641 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки, зокрема до методів визначення електромагнітних параметрів асинхронних двигунів. Корисна модель може бути використана для задач ідентифікації електромагнітних параметрів (ЕМП) асинхронних двигунів (АД) при живленні від джерела синусоїдної напруги без виведення двигуна з технологічного процесу виробництва на підприємстві. Відомий спосіб визначення активних та індуктивних опорів ротора [Способ определения активных и индуктивных сопротивлений рассеяния обмотки ротора асинхронного двигателя А.С. СССР 1372259: G01R 31/34 / Г.Г. Рогозин, Ю.И. Печуркин, В.И. Алексеев], за яким нерухомий АД підключають до однофазного джерела живлення промислової частоти, вимірюють значення напруги, струму статора та кута між ними, відключають джерело у момент переходу струму через нуль, вимірюють миттєві значення напруги, що загасає. За отриманими даними розраховують активні та індуктивні опори ротора. Спільні ознаки із корисною моделлю, що заявляється: - підключення АД до джерела живлення; - вимірювання значення напруги, струму статора та кута між ними; - визначення електромагнітних параметрів асинхронного двигуна. Недоліками наведеного способу визначення параметрів є: - низька точність результатів, що обумовлюється неврахуванням опорів, еквівалентних втратам у сталі ротора та статора, ефекту витіснення струму в роторі; - необхідність у розбиранні АД для визначення індуктивного опору розсіювання статора; - розділення операцій по визначенню параметрів двигуна (статора за однією схемою, а ротора - за іншою) робить зазначений спосіб малопридатним для практичного визначення параметрів АД. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, вибраним як прототип, є спосіб [Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією: Корисна модель № 76422: G01R 27/08 / М.В. Загірняк, Д.Й. Родькін, Ю.В. Ромашихін, О.П. Чорний, В.В. Ящук, Д.І. Родькін, Ж.І. Ромашихіна - заявка № 201011459; опубліковано 26.04.2011, бюл. № 8/2011] ідентифікації електромагнітних параметрів асинхронних двигунів за Т-подібною схемою заміщення з використанням рівнянь балансу складових миттєвої потужності. Спосіб полягає у підключенні АД до джерела живлення, вимірюванні сигналів напруги та струму статора протягом періоду змінної напруги Т, формуванні системи рівнянь балансу складових миттєвої потужності, порядок якої визначається кількістю невідомих, розрахунку системи рівнянь, визначенні електромагнітних параметрів асинхронного двигуна. В схему заміщення асинхронного двигуна послідовно дійсному джерелу живлення підключають додаткове фіктивне джерело живлення з заданою амплітудою та частотою, які відрізняються від параметрів відомого джерела. Вимірюють напругу та струм від дійсного джерела живлення, визначають гармонічні складові миттєвої потужності для джерел живлення, включно з фіктивним джерелом та струмом від нього, елементів схеми заміщення. Визначають електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна. Спільні ознаки із корисною моделлю, що заявляється: - підключають додаткове фіктивне джерело живлення з заданою амплітудою та частотою; - вимірюють напругу та струм від дійсного джерела живлення; - визначають гармонічні складові миттєвої потужності для джерел живлення, включно з фіктивним джерелом та струмом від нього, елементів схеми заміщення, формують систему ідентифікаційних рівнянь балансу гармонік потужності для визначення електромагнітних параметрів схеми заміщення асинхронного двигуна; - визначають електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна від фіктивного джерела живлення. Недоліком наведеного способу визначення ЕМП АД є недостатня точність визначення електромагнітних параметрів АД у зв'язку з використанням високочастотних джерел напруги та струму. В основу корисної моделі поставлено задачу підвищити точність та достовірність визначення ЕМП АД шляхом використання рівнянь балансу складових миттєвої потужності при живленні від джерела синусоїдної напруги, що забезпечує точність визначення параметрів електричних машин при живленні від джерела синусоїдної напруги. Згаданий технічний результат при реалізації корисної моделі досягається тим, що дослідний АД підключають до джерела синусоїдної напруги через датчики напруги та струму, вимірюють напругу та струм статора, обирають раціональну схему заміщення, задають параметри фіктивного джерела, визначають гармонічні складові миттєвої потужності, складають та 1 UA 91641 U розв'язують систему рівнянь балансу з урахуванням реального та фіктивного джерела живлення, визначають опори, індуктивності та невідомі струми в контурах. Запропонований спосіб пояснюється наступним кресленням, де на фіг. 1 наведена Т подібна схема заміщення АД, на якій прийнятті позначення: U 1 5 асинхронного двигуна від дійсного джерела живлення; - напруга живлення I11 - струм статорного кола від дійсного джерела живлення; U - напруга живлення асинхронного двигуна від фіктивного джерела i живлення; I1 - струм статорного кола від фіктивного джерела живлення; I/ - струм роторного i 21 кола від дійсного джерела живлення; I/ 2 - струм роторного кола від фіктивного джерела i живлення; I - струм кола намагнічування від дійсного джерела живлення; I - струм кола 1 i 10 намагнічування від фіктивного джерела живлення; R1 - активний опір статорного кола; L1 / індуктивність статорного кола; L - індуктивність кола намагнічування; R - приведений 2 L/2 активний опір роторного кола; - приведена індуктивність роторного кола; на фіг. 2. наведені залежності від відносної частоти повного, активного та індуктивного опорів Т-подібної схеми заміщення, на якій прийняті наступні позначення: Z - повний опір; R - еквівалентний 15 активний опір; X - еквівалентний індуктивний опір. Спосіб здійснюється наступним чином: АД підключається до джерела синусоїдної напруги. Вимірюються значення напруги ut та струму it АД від дійсного джерела напруги U протягом 1 20 періоду T (фіг. 1), додатково вводиться фіктивне джерело живлення з відомою амплітудою та частотою, відмінною від частоти мережі. Сигнал напруги ut та струму it записують у вигляді тригонометричних рядів: ut u д t uшті t U1 cost N Uni cosi t ; n 1 it i д t iшті t I1a cost I1b sint M M m 1 m 1 Imai cosi t Imbi sini t , де: u д t - миттєве значення напруги дійсного джерела живлення; uшті t - миттєве значення напруги фіктивного джерела живлення; 25 U1 cost - косинусна складова напруги від дійсного джерела живлення; i - кругова частота і-го фіктивного джерела живлення; n - номер гармоніки напруги; N - число гармонік напруги; i - кількість фіктивних джерел живлення; N Uni cosit n 1 30 - сума складових напруги на n-ій гармоніці фіктивного джерела живлення; i д t - миттєве значення струму від дійсного джерела живлення; iШТІ t - миттєве значення струму фіктивного джерела живлення; I1a cost - косинусна складова струму від дійсного джерела живлення; I1b sint - синусна складова струму від дійсного джерела живлення; M Imai cosit m 1 - сума косинусних складових струму на m-ій гармоніці; 2 UA 91641 U M Imbi sinit m 1 5 10 15 - сума синусних складових струму на m-ій гармоніці; m - номер гармоніки струму; M - число гармонік струму. Кількість псевдоджерел залежить від кількості невідомих параметрів схеми заміщення. Стосовно до Т-подібної схеми заміщення (фіг. 1) невідомими параметрами є ЕМП схеми і гармоніки струмів в колі ротора і контурі намагнічування. Введення одного додаткового псевдо джерела для Т-подібної схеми заміщення дозволяє скласти десять ідентифікаційних рівнянь балансу складових миттєвої потужності. Постійну складову отримують при відніманні відповідних одночастотних складових напруги та струму 1 2 , тобто при 1 2 . Синусні та косинусні складові отримують як суму або різницю одночастотних і різночастотних складових. Завдяки використанню псевдоджерела отримуються складові миттєвої потужності на джерелі живлення, на активному опорі й індуктивності. При живленні АД низькочастотною напругою з'являються області частот, в яких спостерігається характерна зміна ЕМП. Зазначену властивість отримують при аналізі виразів для еквівалентних опорів Т-подібної схеми заміщення (фіг. 1): - еквівалентний активний опір: R R1 2 2R 2 X m R 2 X 2 X m 2 ; 2 - еквівалентний індуктивний опір X X1 20 25 30 35 40 2 R 2 X m 3 X 2 X m 3 X 2 X m 2 2 R 2 X 2 Xm 2 2 , X1 - індуктивний опір статора; X2 - індуктивний опір ротора; R1 - активний опір статора; де: R 2 - активний опір ротора; Xm - опір контуру намагнічування. Залежності зміни еквівалентних опорів схеми заміщення від частоти (фіг. 2) показують перегин, який пояснює перерозподіл енергії між контурами в області низьких частот. При цьому точки перегину залежно від потужності і конструкційних особливостей зміщуються відносно частоти. Тобто джерело живлення повинно забезпечувати необхідний гармонічний склад напруги та струму в діапазоні від 0 до 10 Гц. При цьому нехтуються втрати сталі зважаючи на їх незначний вплив, що дозволяє спростити процедуру визначення ЕМП АД. Визначаються складові миттєвої потужності для джерел живлення, активного опору, індуктивності. У відповідності зі схемою заміщення АД (фіг. 1) складаються рівняння енергетичного балансу для складових гармонік миттєвої потужності. Для двох гармонік напруги і струму можна скласти десять ідентифікаційних рівнянь. Невідомими параметрами є електромагнітні параметри (активні опори та індуктивні статорного, роторного кола та кола намагнічування) та гармоніки струму від фіктивного джерела живлення. Рівняння енергетичного балансу складаються у відповідності з тим, що складові гармонік миттєвої потужності джерела синусоїдної напруги дорівнюють сумі складових гармонік миттєвих потужностей на кожному елементі Т-подібної схеми заміщення асинхронного двигуна (фіг. 1). Складається система рівнянь енергетичного балансу складових гармонік миттєвої потужності відповідно до схеми заміщення (фіг. 1): P0 д P0R j ; Pkac д Pkac R j Pkac L j ; P kbc д Pkbc R j Pkbc L j ; Pka д Pka R Pka L ; s j s j s Pkb s д Pkb sR j Pkb sL j , де P0 д - нульова складова гармонік миттєвої потужності джерела синусоїдної напруги; Pkac д , Pkbc д - косинусні та синусні канонічні складові гармонік миттєвої потужності джерела синусоїдної напруги відповідно; Pka s д , Pkb s д - косинусні та синусні неканонічні складові гармонік миттєвої потужності джерела синусоїдної напруги відповідно; складових миттєвої потужності на активних опорах j-гo кола; 3 P0R j - сума постійних UA 91641 U Pka R , Pkb R , Pka L , Pkb L 5 - сума косинус них та синусних канонічних складових c j c j c j c j миттєвої потужності на активних опорах та індуктивностях j-гo кола відповідно; PkasR j , PkbsR j , PkasL j , PkbsL j - сума косинусних та синусних неканонічних складових миттєвої потужності на активних опорах та індуктивностях j-гo кола відповідно. З урахуванням отриманих вище виразів складаються рівняння для ідентифікації ЕМП АД з використанням енергетичного методу: 1 U1b1I1b2 U1a1I1a2 U1b2I1b1 U1a2I1a1 2 R1I1b1I1b2 I1a1I1a2 R 2 I2b1I2b2 I2a1I2a2 1 L11I1a1I1b2 I1b1I1a2 2 1 L 2 1I2a1I2b2 I2b1I2a2 2 1 L m 1Ima1Imb2 Imb1Ima2 ; 2 1 U1a1I1a2 U1a2I1a1 U1b2I1b1 U1b1I1b2 2 R1I1a1I1a2 I1b1I1b2 R 2 I2a1I2a2 I2b1I2b2 1 L11I1a1I1b2 I1b1I1a2 2 1 L 2 1I2a1I2b2 I2b1I2a2 2 1 L m 1Ima1Imb2 Imb1Ima2 ; 2 1 2 2 U1a2I1a2 Uab2I1b2 1 R1 I1a2 I1b2 2 2 1 R 2 I2a2 I2b2 L11I1a2I1b2k 2 2 2 L 2 1I2a2I2b2k L m 1Ima2Imb2k; 1 2 2 U1a1I1a1 U1b1I1b1 1 R1 I1a1 I1b1 2 2 1 R2 I2a1 I2b1 L11I1a1I1b1 2 2 2 L 21I2a1I2b1 Lm1Ima 1Imb 1; 10 2 2 U1b1I1b1 U1a1I1a1 R1I1a1 I1b1 R2 I2a1 I2b1; 2 2 2 2 2 U1a2I1a2 U1b2I1b2 R1I1a2 I1b2 R2 I2a2 I2b2 ; 2 1 U1b2I1a1 U1a1I1b2 U1a2I1b1 U1b1I1a2 2 R1I1a1I1b2 I1b1I1a2 R2 I2a1I2b2 I2b1I2a2 1 L11I1a1I1a2 I1b1I1b2 k 1 2 1 L 21I2a1I2a2 I2b1I2b2 k 1 2 1 Lm1Ima 1Ima 2 Imb 1Imb 2 k 1; 2 4 UA 91641 U 1 U1a2I1b1 U1a1I1b2 U1b2I1a1 U1b1I1a2 2 R1I1a1I1b2 I1b1I1a2 R2 I2a1I2b2 I2b1I2a2 1 L11I1a1I1a2 I1b1I1b2 k 1 2 1 L 21I2a1I2a2 I2b1I2b2 k 1 2 1 Lm1Ima 1Ima 2 Imb 1Imb 2 k 1; 2 1 U1b2I1a2 U1a2I1b2 R1I1a2I1b2 R2I2a2I2b2 2 1 1 2 2 L11 I1a2 I1b2 k L21 I2a2 I2b2 k 2 2 2 2 1 2 2 Lm1 Ima 2 Imb 2 k; 2 1 U1b1I1a1 U1a1I1b1 R1I1a1I1b1 R 2I2a1I2b1 2 1 1 2 2 L11 I1a1 I1b1 L 2 1 I2a1 I2b1 2 2 2 2 1 2 2 L m 1 Ima 1 Imb 1 . 2 Система рівнянь для двох частот матиме вигляд: 5 Ima1 I2a1 I1a1; Imb1 I2b1 I1b1; Ima2 I2a2 I1a2 ; Imb2 I2b2 I1b2 де I1a1,I1b1 - косинусні та синусні складові струму статорного кола від дійсного джерела відповідно; I1a 3 ,I1b 3 - косинусні та синусні складові струму статорного кола від фіктивного / / джерела відповідно; I2a1 , I2b1 - косинусні та синусні складові струму роторного кола від дійсного / / джерела відповідно; I2a 3 ,I2b 3 10 15 - косинусні та синусні складові струму роторного кола від фіктивного джерела відповідно; Ia1,Ib1 - косинусні та синусні складові струму кола намагнічування від дійсного джерела відповідно; Ia 3 ,Ib 3 - косинусні та синусні складові струму кола намагнічування від фіктивного джерела відповідно. Відповідно до фіг. 2 формують систему рівнянь та знаходять ЕМП схеми заміщення для одного значення k . Змінюють значення k в діапазоні від 0 до 10 Гц, формують систему рівнянь для кожного значення k , визначають ЕМП схеми заміщення для кожного значення k . k Відповідно k - номер гармоніки. Мінімальна похибка визначення ЕМП відповідає точкам 1 перегину. Відповідно остаточно вибирають ЕМП, які відповідають точкам перегину. Корисна модель дозволяє підвищити точність ідентифікації ЕМП АД при живленні від джерела синусоїдної напруги без виводу двигуна з технологічного процесу. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги, який полягає у підключенні дослідного асинхронного двигуна до джерела живлення, з використанням частот напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь балансу потужності джерела напруги та на елементах схеми заміщення асинхронного двигуна, визначенні електромагнітних параметрів асинхронного двигуна шляхом розв'язання системи ідентифікаційних рівнянь, який відрізняється тим, що в схему заміщення асинхронного двигуна 5 UA 91641 U 5 послідовно дійсному джерелу живлення підключають додаткове фіктивне джерело живлення з заданою амплітудою та частотою, яка менша від частоти напруги, тобто для діапазону частот 010 Гц, вимірюють напругу та струм від дійсного джерела живлення, визначають гармонічні складові миттєвої потужності для джерел живлення, включно з фіктивним джерелом та струмом від нього, елементів схеми заміщення, формують систему ідентифікаційних рівнянь балансу гармонік потужності для визначення електромагнітних параметрів схеми заміщення асинхронного двигуна, визначають електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна від фіктивного джерела живлення. 6 UA 91641 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюRodkin Dmytro Yosypovych, Romashykhin Yurii Volodymyrovych, Reznik Dmytro Volodymyrovych
Автори російськоюРодькин Дмитрий Иосифович, Ромашихин Юрий Владимирович, Резник Дмитрий Владимирович
МПК / Мітки
МПК: G01R 27/08
Мітки: двигуна, синусоїдної, визначення, напруги, живленні, асинхронного, джерела, спосіб, параметрів
Код посилання
<a href="https://ua.patents.su/9-91641-sposib-viznachennya-parametriv-asinkhronnogo-dviguna-pri-zhivlenni-vid-dzherela-sinusodno-naprugi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги</a>
Спосіб пуску асинхронного двигуна при живленні від індуктивно-ємнісного перетворювача з додатковими обмотками дроселя
Номер патенту: 20706
Опубліковано: 15.02.2007
Автори: Гонтар Віктор Григорович, Решетняк Анатолій Володимирович, Некрасов Андрій Вікторович, Соловйов Денис Сергійович
МПК: H02P 1/00
Мітки: спосіб, перетворювача, індуктивно-ємнісного, обмотками, живленні, асинхронного, дроселя, двигуна, додатковими, пуску
Формула / Реферат:
Спосіб пуску асинхронного двигуна при живленні від індуктивно-ємнісного перетворювача з додатковими обмотками дроселя з контролем процесу запуску у функції обертів, який відрізняється тим, що для збільшення пускового моменту дроселі індуктивно-ємнісного перетворювача мають додаткові обмотки, які під час запуску асинхронного двигуна підключаються до мережі живлення, в результаті чого напруга на обмотках статора збільшується на величину,...
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Пасмурских Олександр Олексійович, Вошун Олексій Миколайович, Чорний Олексій Петрович, Сисюк Геннадій Юрійович, Родькін Дмитро Йосипович, Добрецов Володимир Валентинович, Долженко Віктор Володимирович, Луговой Анатолій Васильович
МПК: G01R 31/34
Мітки: параметрів, асинхронного, діагностики, ротором, спосіб, пристрій, короткозамкненим, двигуна, здійснення
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб розрахунку усталених режимів асинхронних двигунів при живленні від автономного асинхронного генератора
Номер патенту: 65505
Опубліковано: 12.12.2011
Автори: Родькін Дмитро Йосипович, Василькова Тетяна Сергіївна, Зачепа Юрій Володимирович
МПК: H02K 17/00
Мітки: спосіб, автономного, асинхронного, усталених, розрахунку, двигунів, режимів, живленні, генератора, асинхронних
Формула / Реферат:
Спосіб розрахунку усталених режимів асинхронних двигунів при живленні від автономного асинхронного генератора, який полягає у визначенні невідомих параметрів системи асинхронний генератор-асинхронний двигун (АГ-АД): активних опорів статора і ротора, реактивних опорів статора і контуру намагнічування та побудова статичних характеристик асинхронного генератора здійснюються на основі балансу провідностей відповідних ланцюгів Г-подібної схеми...
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та струму
Номер патенту: 85325
Опубліковано: 11.11.2013
Автори: Шнуренко Єгор Анатолійович, Ромашихін Юрій Володимирович, Потапов Антон Леонідович, Родькін Дмитро Йосипович, Ромашихіна Жанна Іванівна
МПК: G01R 27/08
Мітки: асинхронних, струму, електромагнітних, спосіб, параметрів, сигналами, псевдополігармонічними, напруги, ідентифікації, двигунів
Формула / Реферат:
1. Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та стуму, що полягає у підключенні дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму, поданні напруги до двигуна, запису у цифровому вигляді напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні...
Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити

Номер патенту: 80683
Опубліковано: 10.06.2013
Автори: Родькін Дмитро Йосипович, Перекрест Андрій Леонідович, Гаврилець Галина Олегівна
МПК: G01M 15/05
Мітки: визначення, стану, двигуна, кріплення, асинхронного, плити, фундаментної, спосіб
Формула / Реферат:
1. Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити, що полягає в підключенні двигуна до мережі, вимірюванні вібрацій двигуна в двох площинах, обробці параметрів вібрацій, який відрізняється тим, що додатково визначають параметри впливу на механічну систему (момент двигуна при пуску), визначають положення в просторі та здійснюють координатні перетворення сили, що породжує вібрацію і визначають її проекції на...
Попередній патент: Спосіб лікування хворих з нейробластомою високого ризику
Наступний патент: Спосіб визначення ступеня токсемії у пацієнтів при мікросатурнізмі
Випадковий патент: Спосіб безперервного розливу сталі