Спосіб роботи накопичувача петлі, носій даних та накопичувач петлі
Формула / Реферат
1. Спосіб роботи накопичувача петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги (1),
- при цьому смуга (1) подається у накопичувач петлі на вході (2) накопичувача і видається з накопичувача петлі на виході (3) накопичувача,
- при цьому за допомогою розташованого на стороні входу пристрою (9) вимірювання натягу вимірюють натяг (Z1), що є на вході (2) накопичувача в смузі (1), на стороні входу, і за допомогою розташованого на стороні виходу пристрою (9) вимірювання натягу вимірюють натяг (Z2), що є на виході (3) накопичувача в смузі (1), на стороні виходу,
- при цьому вхідний натяг (Z1) і вихідний натяг (Z2) подають в управляючий пристрій (11),
- при цьому управляючий пристрій (11) визначає щонайменше для одного розташованого між входом (2) накопичувача і виходом (3) накопичувача привідного ролика (6) залежно від вхідного натягу (Z1) і вихідного натягу (Z2) сигнал управління (m*, n*) і подає його щонайменше на один привідний ролик (6),
- при цьому накопичена у накопичувачі петлі смуга (1) навантажується щонайменше одним привідним роликом (6) згідно з управляючим сигналом (m*, n*),
- при цьому управляючий пристрій (11) визначає управляючий сигнал так, що різниця (![]() Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці (
Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці (![]() Z*) натягу.
Z*) натягу.
2. Спосіб роботи за п. 1, який відрізняється тим, що величина заданої різниці (![]() Z*) натягу значно менше вхідного натягу (Z1) і вихідного натягу (Z2).
Z*) натягу значно менше вхідного натягу (Z1) і вихідного натягу (Z2).
3. Спосіб роботи за п. 2, який відрізняється тим, що задана різниця (![]() Z*) натягу має значення нуль.
Z*) натягу має значення нуль.
4. Спосіб роботи за будь-яким з пп. 1-3, який відрізняється тим, що між входом (2) накопичувача і виходом (3) накопичувача є додатково щонайменше до одного привідного ролика (6) непривідні ролики (4, 5), і що число непривідних роликів (4, 5) більше числа привідних роликів (6).
5. Спосіб роботи за п. 4, який відрізняється тим, що число привідних роликів (6) складає щонайменше три, і що між кожними двома привідними роликами (6) розташовано стільки ж непривідних роликів (4, 5).
6. Спосіб роботи за будь-яким з пп. 1-5, який відрізняється тим, що накопичувач петлі має декілька розташованих послідовно одна за одною ділянок (14) накопичувача, що для кожної ділянки (14) накопичувача задають власний заданий коефіцієнт заповнення, і що кожна ділянка (14) накопичувача працює так, що дійсний коефіцієнт заповнення кожної ділянки накопичувача (14) наближається до відповідного заданого коефіцієнта заповнення.
7. Спосіб роботи за п. 6, який відрізняється тим, що щонайменше в двох ділянках (14) накопичувача розташований щонайменше один привідний ролик (6), що управляючий пристрій (11) визначає для кожного привідного ролика (6) залежно від натягу (Z1) на стороні входу і натягу (Z2) на стороні виходу відповідний управляючий сигнал (m*, n*) і подає на відповідний привідний ролик (6), і що накопичена у накопичувачі петлі смуга
(1) навантажується кожним привідним роликом (6) згідно з відповідним управляючим сигналом (m*, n*).
8. Носій даних з управляючою програмою (12), що зберігається на носії даних, при цьому управляюча програма (12) приводить до того, що управляючий пристрій (11) визначає щонайменше для одного розташованого між входом (2) накопичувача і виходом (3) накопичувача привідного ролика (6) залежно від вхідного натягу (Z1) і вихідного натягу (Z2) сигнал управління (m*, n*) і подає управляючий сигнал (m*, n*) щонайменше на один привідний ролик (6), коли управляюча програма (12) виконується управляючим пристроєм (11), при цьому управляючий пристрій (11) визначає управляючий сигнал (m*, n*) так, що різниця (![]() Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці (
Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці (![]() Z*) натягу.
Z*) натягу.
9. Накопичувач петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги (1),
- при цьому накопичувач петлі має вхід (2) накопичувача, призначений для подачі смуги (1) у накопичувач петлі,
- при цьому накопичувач петлі має вихід (3) накопичувача, призначений для видачі смуги (1) з накопичувача петлі,
- при цьому накопичувач петлі має щонайменше один розташований між входом (2) накопичувача і виходом (3) накопичувача привідний ролик (6),
- при цьому накопичувач петлі має розташований на стороні входу і розташований на стороні виходу пристрій (9, 10) вимірювання натягу, за допомогою якого можна вимірювати вхідний натяг (Z1), що є на вході (2) накопичувача в смузі (1), і вихідний натяг (Z2), що є на виході (3) накопичувача в смузі (1),
- при цьому накопичувач петлі має управляючий пристрій (11), в який подаються вхідний і вихідний натяг (Z1, Z2),
- при цьому управляючий пристрій (11) визначає щонайменше для одного розташованого між входом (2) накопичувача і виходом (3) накопичувача привідного ролика (6) залежно від вхідного натягу (Z1) і вихідного натягу (Z2) сигнал управління (m*, n*) і подає його щонайменше на один привідний ролик (6),
- при цьому накопичена у накопичувачі петлі смуга (1) навантажується щонайменше одним привідним роликом (6) згідно з управляючим сигналом (m*, n*),
- при цьому управляючий пристрій (11) виконаний так, що він визначає залежно від вхідного натягу (Z1) і вихідного натягу (Z2) управляючий сигнал щонайменше для одного привідного ролика (6) і видає його щонайменше на один привідний ролик (6),
- при цьому управляючий пристрій (1) виконаний так, що він визначає управляючий сигнал (m*, n*) так, що різниця (![]() Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці (
Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці (![]() Z*) натягу.
Z*) натягу.
10. Накопичувач петлі за п. 9, який відрізняється тим, що управляючий пристрій (1) виконаний так, що величина заданої різниці (![]() Z*) натягу значно менше вхідного натягу (Z1) і вихідного натягу (Z2).
Z*) натягу значно менше вхідного натягу (Z1) і вихідного натягу (Z2).
11. Накопичувач петлі за п. 10, який відрізняється тим, що управляючий пристрій (1) виконаний так, що задана різниця (![]() Z*) натягу має значення нуль.
Z*) натягу має значення нуль.
12. Накопичувач петлі за будь-яким з пп. 9-11, який відрізняється тим, що між входом (2) накопичувача і виходом (3) накопичувача є додатково щонайменше до одного привідного ролика (6) непривідні ролики (4, 5), і що число непривідних роликів (4, 5) більше числа привідних роликів (6).
13. Накопичувач петлі за п. 12, який відрізняється тим, що число привідних роликів (6) складає щонайменше три, і що між кожними двома привідними роликами (6) розташовано стільки ж непривідних роликів (4, 5).
14. Накопичувач петлі за будь-яким з пп. 9-13, який відрізняється тим, що накопичувач петлі має декілька розташованих послідовно одна за одною ділянок (14) накопичувача, що управляючий пристрій (1) виконаний так, що для кожної ділянки (14) накопичувача задається власний заданий коефіцієнт заповнення, і що кожна ділянка (14) накопичувача працює так, що дійсний коефіцієнт заповнення кожної ділянки накопичувача (14) наближається до відповідного заданого коефіцієнта заповнення.
15. Накопичувач петлі за п. 14, який відрізняється тим, що щонайменше в двох ділянках (14) накопичувача розташований щонайменше один привідний ролик (6), що управляючий пристрій (11) виконаний так, що він визначає для кожного привідного ролика (6) залежно від натягу (Z1) на стороні входу і натягу (Z2) на стороні виходу відповідний управляючий сигнал (m*, n*) і подає на відповідний привідний ролик (6), і що накопичена у накопичувачі петлі смуга (1) навантажується кожним привідним роликом (6) згідно з відповідним управляючим сигналом (m*, n*).
Текст
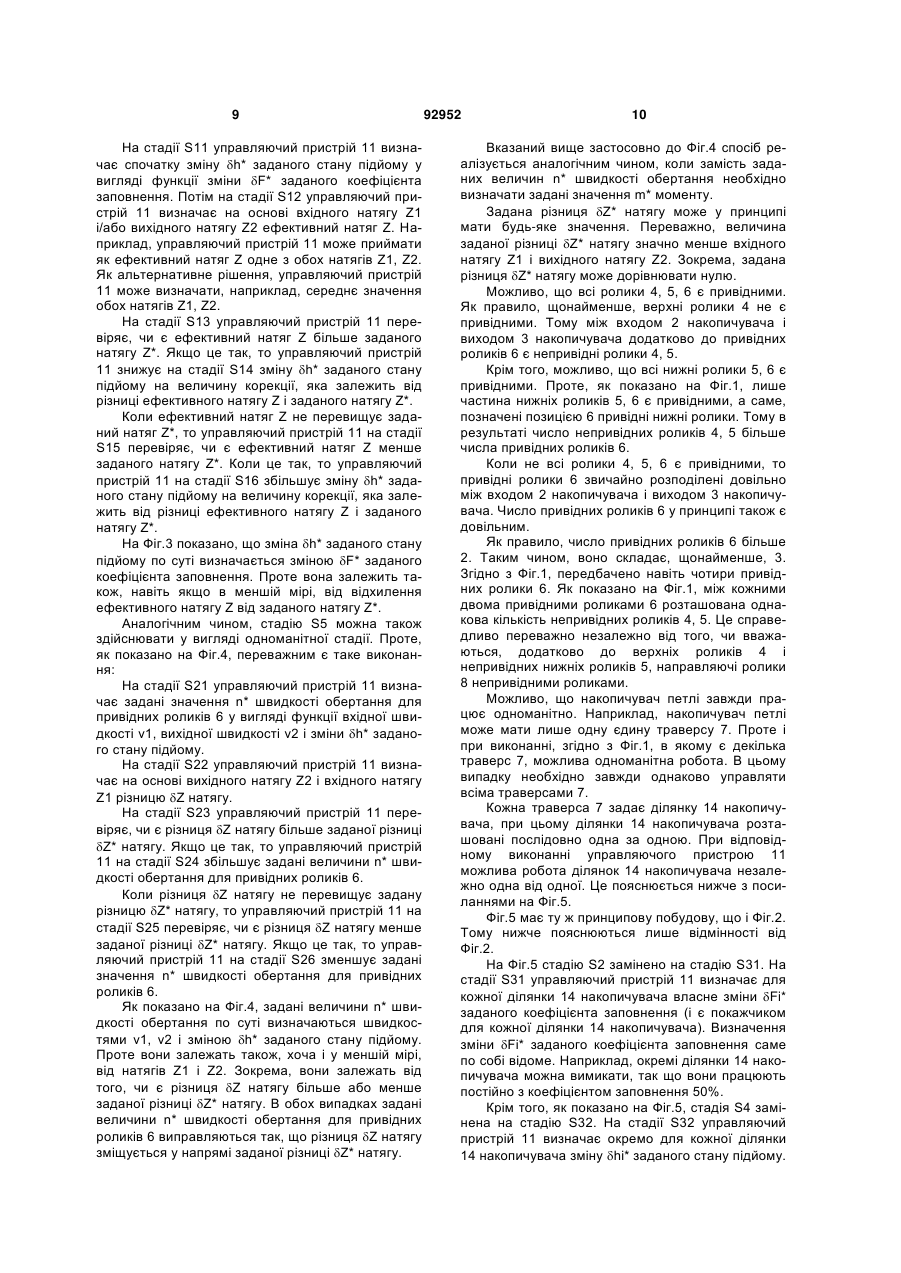
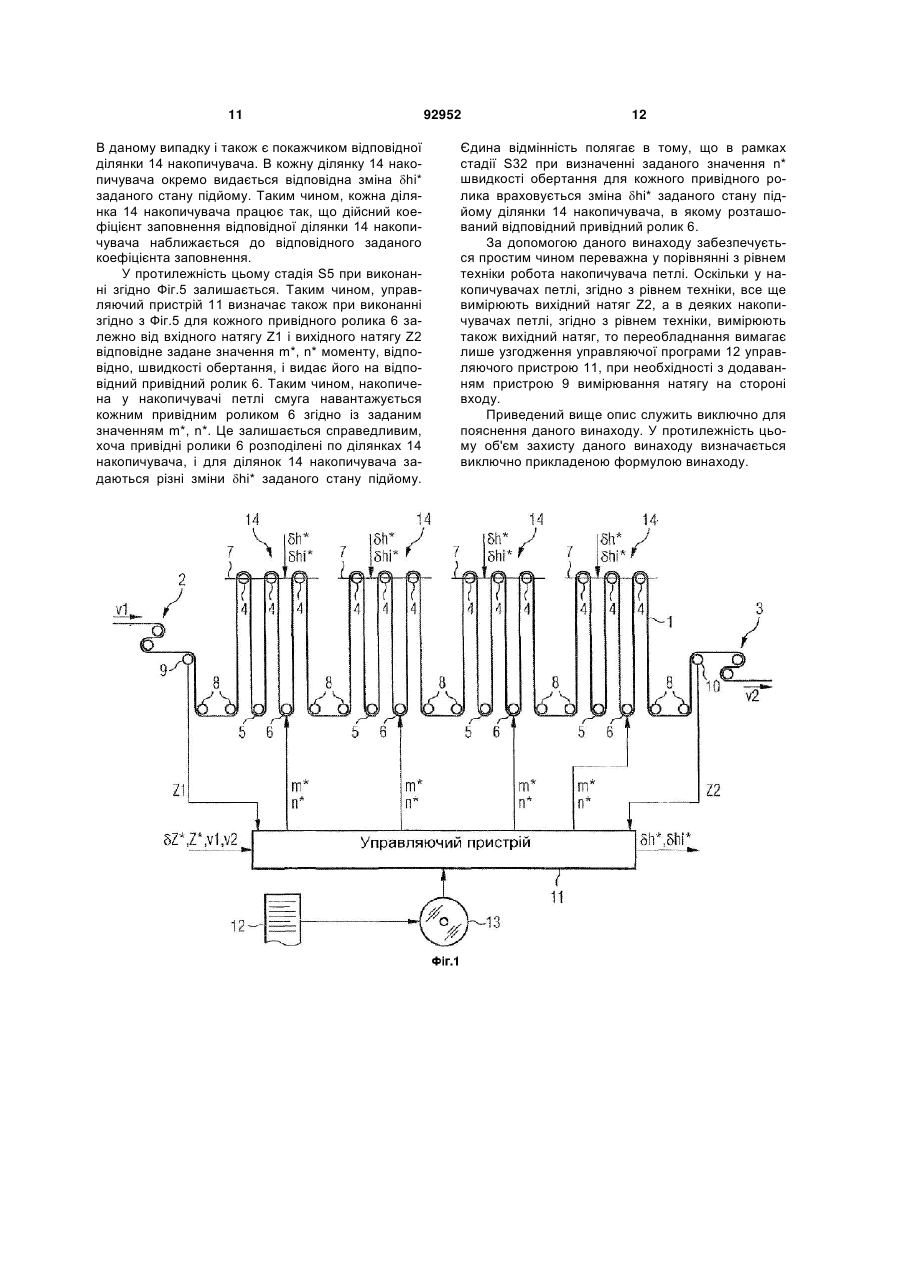
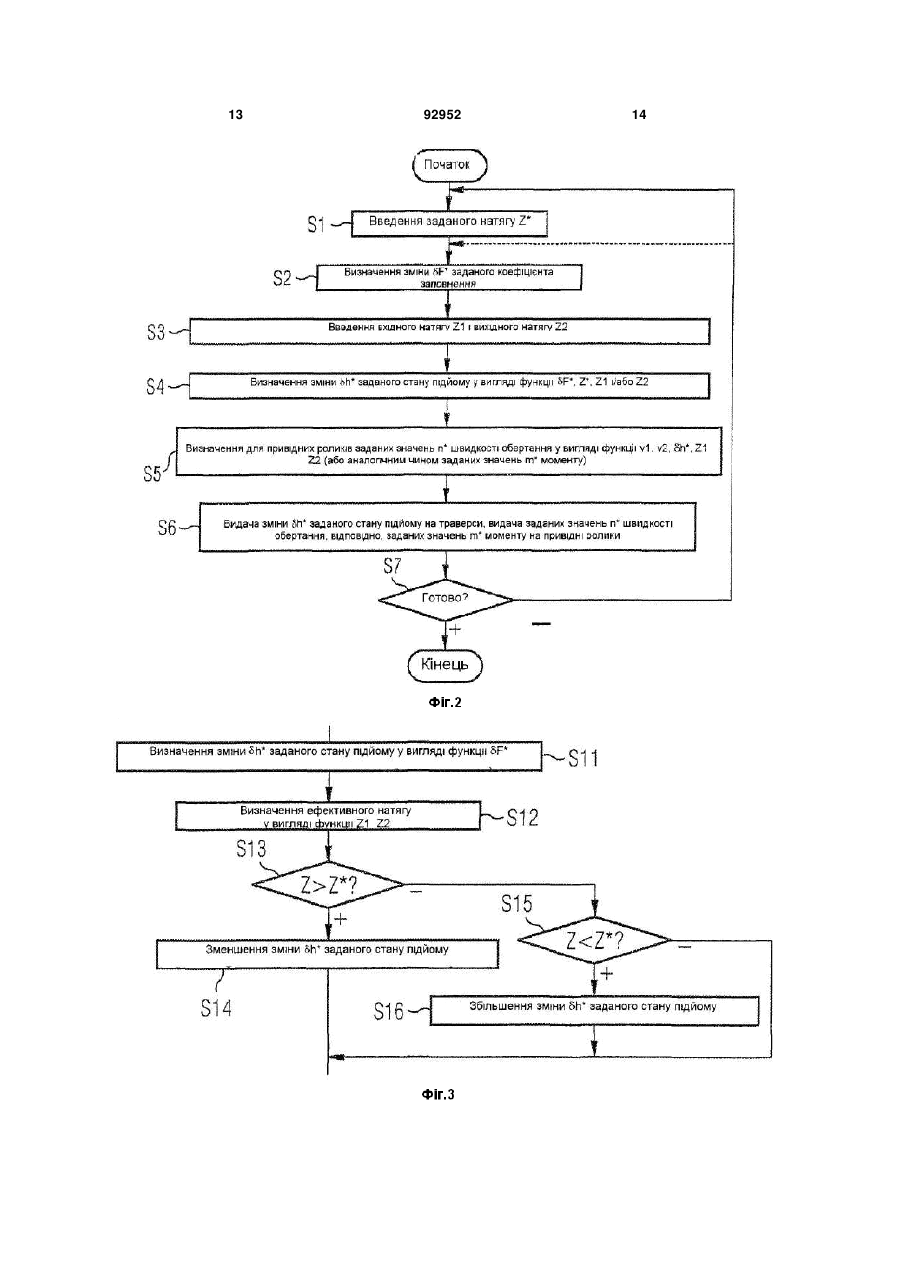
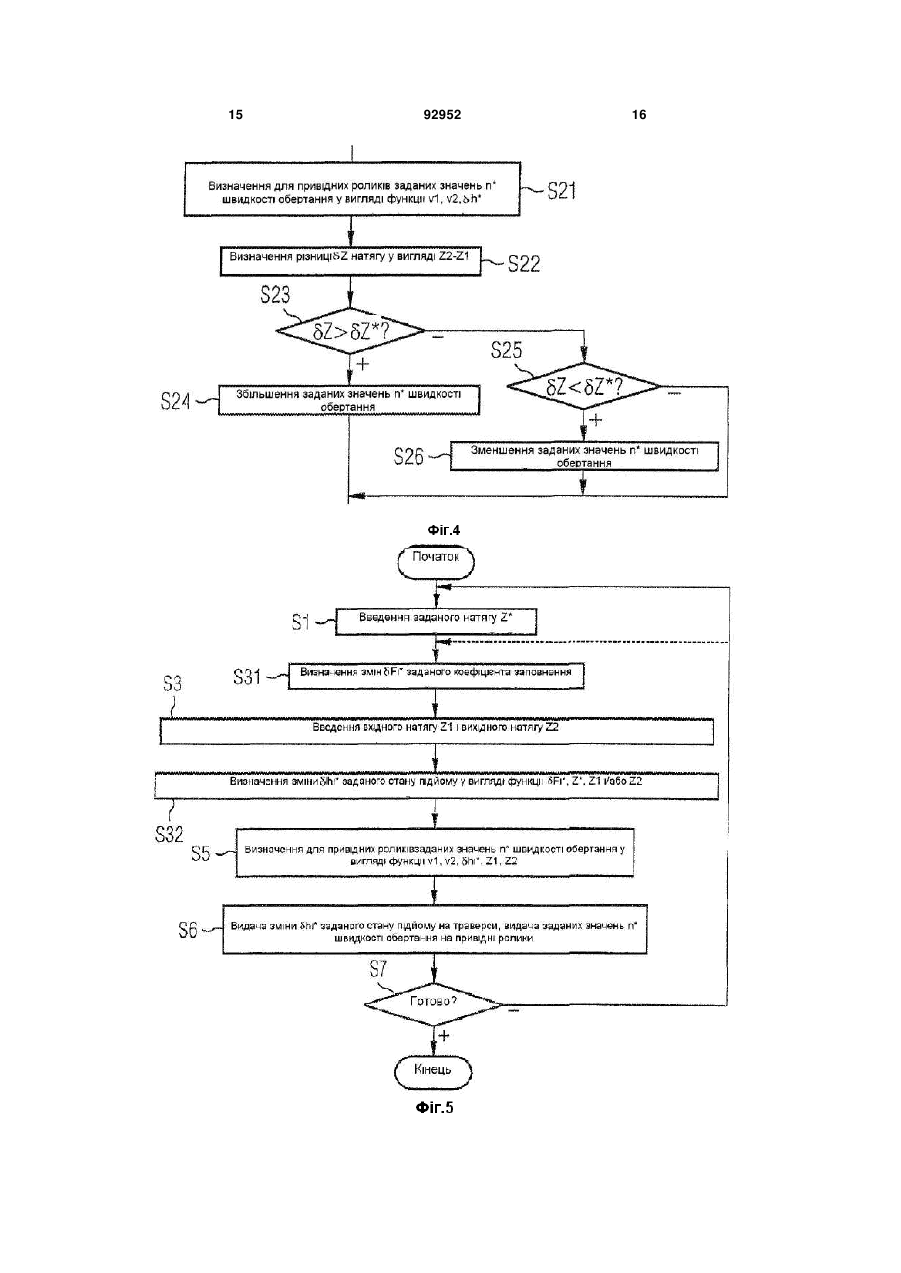
УКРАЇНА (19) UA (11) 92952 (13) C2 (51) МПК-2011.01 B65H 20/00 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС ДО ПАТЕНТУ НА ВИНАХІД (54) СПОСІБ РОБОТИ НАКОПИЧУВАЧА ПЕТЛІ, НОСІЙ ДАНИХ ТА НАКОПИЧУВАЧ ПЕТЛІ C2 (13) 92952 (11) 3. Спосіб роботи за п. 2, який відрізняється тим, що задана різниця ( Z*) натягу має значення нуль. 4. Спосіб роботи за будь-яким з пп. 1-3, який відрізняється тим, що між входом (2) накопичувача і виходом (3) накопичувача є додатково щонайменше до одного привідного ролика (6) непривідні ролики (4, 5), і що число непривідних роликів (4, 5) більше числа привідних роликів (6). 5. Спосіб роботи за п. 4, який відрізняється тим, що число привідних роликів (6) складає щонайменше три, і що між кожними двома привідними роликами (6) розташовано стільки ж непривідних роликів (4, 5). 6. Спосіб роботи за будь-яким з пп. 1-5, який відрізняється тим, що накопичувач петлі має декілька розташованих послідовно одна за одною ділянок (14) накопичувача, що для кожної ділянки (14) накопичувача задають власний заданий коефіцієнт заповнення, і що кожна ділянка (14) накопичувача працює так, що дійсний коефіцієнт заповнення кожної ділянки накопичувача (14) наближається до відповідного заданого коефіцієнта заповнення. 7. Спосіб роботи за п. 6, який відрізняється тим, що щонайменше в двох ділянках (14) накопичувача розташований щонайменше один привідний ролик (6), що управляючий пристрій (11) визначає для кожного привідного ролика (6) залежно від натягу (Z1) на стороні входу і натягу (Z2) на стороні виходу відповідний управляючий сигнал (m*, n*) і подає на відповідний привідний ролик (6), і що накопичена у накопичувачі петлі смуга (1) навантажується кожним привідним роликом (6) згідно з відповідним управляючим сигналом (m*, n*). 8. Носій даних з управляючою програмою (12), що зберігається на носії даних, при цьому управляюча програма (12) приводить до того, що управляючий пристрій (11) визначає щонайменше для одного розташованого між входом (2) накопичувача і виходом (3) накопичувача привідного ролика (6) залежно від вхідного натягу (Z1) і вихідного натягу (Z2) сигнал управління (m*, n*) і подає управляючий сигнал (m*, n*) щонайменше на один привідний ролик (6), коли управляюча програма (12) виконується управляючим пристроєм (11), при цьому управляючий пристрій (11) визначає управляючий UA (21) a200900601 (22) 26.06.2007 (24) 27.12.2010 (86) PCT/EP2007/056335, 26.06.2007 (31) 10 2006 035 008.1 (32) 28.07.2006 (33) DE (46) 27.12.2010, Бюл.№ 24, 2010 р. (72) ШУЛЬЦЕ БЕРТРАМ, DE (73) СІМЕНС АКЦІЕНГЕЗЕЛЬШАФТ, DE (56) US 2004118892 24.06.2004 US 4915282 10.04.1990 EP 0425715 08.05.1991 (57) 1. Спосіб роботи накопичувача петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги (1), - при цьому смуга (1) подається у накопичувач петлі на вході (2) накопичувача і видається з накопичувача петлі на виході (3) накопичувача, - при цьому за допомогою розташованого на стороні входу пристрою (9) вимірювання натягу вимірюють натяг (Z1), що є на вході (2) накопичувача в смузі (1), на стороні входу, і за допомогою розташованого на стороні виходу пристрою (9) вимірювання натягу вимірюють натяг (Z2), що є на виході (3) накопичувача в смузі (1), на стороні виходу, - при цьому вхідний натяг (Z1) і вихідний натяг (Z2) подають в управляючий пристрій (11), - при цьому управляючий пристрій (11) визначає щонайменше для одного розташованого між входом (2) накопичувача і виходом (3) накопичувача привідного ролика (6) залежно від вхідного натягу (Z1) і вихідного натягу (Z2) сигнал управління (m*, n*) і подає його щонайменше на один привідний ролик (6), - при цьому накопичена у накопичувачі петлі смуга (1) навантажується щонайменше одним привідним роликом (6) згідно з управляючим сигналом (m*, n*), - при цьому управляючий пристрій (11) визначає управляючий сигнал так, що різниця ( Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці ( Z*) натягу. 2. Спосіб роботи за п. 1, який відрізняється тим, що величина заданої різниці ( Z*) натягу значно менше вхідного натягу (Z1) і вихідного натягу (Z2). 2 (19) 1 3 92952 4 сигнал (m*, n*) так, що різниця ( Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці ( Z*) натягу. 9. Накопичувач петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги (1), - при цьому накопичувач петлі має вхід (2) накопичувача, призначений для подачі смуги (1) у накопичувач петлі, - при цьому накопичувач петлі має вихід (3) накопичувача, призначений для видачі смуги (1) з накопичувача петлі, - при цьому накопичувач петлі має щонайменше один розташований між входом (2) накопичувача і виходом (3) накопичувача привідний ролик(6), - при цьому накопичувач петлі має розташований на стороні входу і розташований на стороні виходу пристрій (9, 10) вимірювання натягу, за допомогою якого можна вимірювати вхідний натяг (Z1), що є на вході (2) накопичувача в смузі (1), і вихідний натяг (Z2), що є на виході (3) накопичувача в смузі (1), - при цьому накопичувач петлі має управляючий пристрій (11), в який подаються вхідний і вихідний натяг (Z1, Z2), - при цьому управляючий пристрій (11) визначає щонайменше для одного розташованого між входом (2) накопичувача і виходом (3) накопичувача привідного ролика (6) залежно від вхідного натягу (Z1) і вихідного натягу (Z2) сигнал управління (m*, n*) і подає його щонайменше на один привідний ролик (6), - при цьому накопичена у накопичувачі петлі смуга (1) навантажується щонайменше одним привідним роликом (6) згідно з управляючим сигналом (m*, n*), - при цьому управляючий пристрій (11) виконаний так, що він визначає залежно від вхідного натягу (Z1) і вихідного натягу (Z2) управляючий сигнал щонайменше для одного привідного ролика (6) і видає його щонайменше на один привідний ролик (6), - при цьому управляючий пристрій (1) виконаний так, що він визначає управляючий сигнал (m*, n*) так, що різниця ( Z) між натягом (Z1) на стороні входу і натягом (Z2) на стороні виходу змінюється у напрямі заданої різниці ( Z*) натягу. 10. Накопичувач петлі за п. 9, який відрізняється тим, що управляючий пристрій (1) виконаний так, що величина заданої різниці ( Z*) натягу значно менше вхідного натягу (Z1) і вихідного натягу (Z2). 11. Накопичувач петлі за п. 10, який відрізняється тим, що управляючий пристрій (1) виконаний так, що задана різниця ( Z*) натягу має значення нуль. 12. Накопичувач петлі за будь-яким з пп. 9-11, який відрізняється тим, що між входом (2) накопичувача і виходом (3) накопичувача є додатково щонайменше до одного привідного ролика (6) непривідні ролики (4, 5), і що число непривідних роликів (4, 5) більше числа привідних роликів (6). 13. Накопичувач петлі за п. 12, який відрізняється тим, що число привідних роликів (6) складає щонайменше три, і що між кожними двома привідними роликами (6) розташовано стільки ж непривідних роликів (4, 5). 14. Накопичувач петлі за будь-яким з пп. 9-13, який відрізняється тим, що накопичувач петлі має декілька розташованих послідовно одна за одною ділянок (14) накопичувача, що управляючий пристрій (1) виконаний так, що для кожної ділянки (14) накопичувача задається власний заданий коефіцієнт заповнення, і що кожна ділянка (14) накопичувача працює так, що дійсний коефіцієнт заповнення кожної ділянки накопичувача (14) наближається до відповідного заданого коефіцієнта заповнення. 15. Накопичувач петлі за п. 14, який відрізняється тим, що щонайменше в двох ділянках (14) накопичувача розташований щонайменше один привідний ролик (6), що управляючий пристрій (11) виконаний так, що він визначає для кожного привідного ролика (6) залежно від натягу (Z1) на стороні входу і натягу (Z2) на стороні виходу відповідний управляючий сигнал (m*, n*) і подає на відповідний привідний ролик (6), і що накопичена у накопичувачі петлі смуга (1) навантажується кожним привідним роликом (6) згідно з відповідним управляючим сигналом (m*, n*). Даний винахід стосується способу роботи накопичувача петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги. Крім того, він стосується носія даних з програмою управління для виконання такого способу роботи, що зберігається на носії даних. Нарешті, винахід стосується накопичувача петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги. Накопичувачі петлі і способи роботи накопичувачів петлі в цілому відомі. Згідно з рівнем техніки, смугу подають у накопичувач петлі на вході накопичувача. На виході накопичувача смуга видається з накопичувача петлі. За допомогою пристрою вимірювання натягу вимірюють наявний в смузі натяг. Як альтернативне рішення, пристрій вимірювання натягу може бути розташований на вході накопичувача або на виході накопичувача. Виміряний натяг подається в управляючий пристрій. На основі виміряного натягу управляючий пристрій регулює стан накопичення накопичувача петлі. Крім того, накопичувач петлі може мати ролики, які приводяться в обертання і які розташовані між входом накопичувача і виходом накопичувача. Управляючий пристрій може визначати для цих роликів управляючі сигнали і видавати на привідні ролики. В цьому випадку накопичена у накопичувачі петель смуга навантажується привідними роликами згідно з управляючими сигналами. Накопичувачі петлі для смуг мають, як правило, велику кількість роликів, при цьому смуга від ролика до ролика поперемінно охоплює верхню сторону і нижню сторону роликів. Ролики встановлені з можливістю перестановки по висоті відносно 5 один одного. За рахунок регулювання вертикальної відстані роликів один від одного можна змінювати довжину накопиченої накопичувачем петлі ділянки смуги. Установка вертикальної відстані здійснюється звичайно за рахунок регулювання моментів або швидкостей залежно від заданого ступеня заповнення накопичувача петлі. Якщо між входом накопичувача і виходом накопичувача приводяться в обертання привідні ролики, то ролики регулюються по окремості відносно моменту і швидкості залежно від вхідної швидкості і/або вихідної швидкості, з якою смуга подається у накопичувач петель, відповідно, видається з нього. Коли момент, відповідно, швидкість, за допомогою яких встановлюється вертикальна відстань роликів один від одного, встановлені неправильно, то це неправильне встановлення здійснює вплив на натяг ділянки смуги, яка знаходиться у накопичувачі петлі. Такий вплив на натяг може мати негативні наслідки для встановлених після накопичувача петлі пристроїв. Згідно з рівнем техніки для запобігання коливань натягу вимірюють натяг, наприклад, на стороні виходу, і подають в управляючий пристрій. Управляючий пристрій виправляє установку вертикальної швидкості залежно від вимірюваного натягу. З US 2004/118892 А1 відомий спосіб регулювання напруги тканого матеріалу. В цьому способі вимірюють в двох місцях матеріалу відповідну напругу розтягування і подають в управляючий пристрій. Управляючий пристрій визначає для привідного ролика, який знаходиться між обома вказаними місцями, задану швидкість обертання, щоб мати на стороні виходу заданий натяг. На основі натягу на стороні входу управляють розташованим перед входом роликом, з якого змотується тканий матеріал. US 4 915 282 має аналогічний зміст розкриття. Накопичувач петлі, згідно з рівнем техніки, вже працює достатньо добре. Проте його роботу можна поліпшити. В основу даного винаходу поставлена задача створення поліпшеного способу роботи накопичувача петлі і пов'язаних з цим предметів (носій даних з відповідною програмою управління, відповідним чином виконаний накопичувач петлі). Задача вирішена за допомогою способу роботи накопичувача петлі, який має ознаки пункту 1 формули винаходу. Крім того, задача вирішена за допомогою носія даних з ознаками пункту 8 і накопичувача петлі з ознаками пункту 9 формули винаходу. Згідно з винаходом, смугу подають у накопичувач петлі на вході накопичувача. Смуга видається з накопичувача петлі на виході накопичувача. Вимірюють як натяг на стороні входу, так і натяг на стороні виходу за допомогою відповідного пристрою вимірювання натягу і подають в управляючий пристрій. Управляючий пристрій визначає залежно від натягу на стороні входу і натягу на стороні виходу сигнал управління, щонайменше, для одного розташованого між входом накопичувача і виходом накопичувача привідного ролика і подає цей управляючий сигнал, щонайменше, на один привідний ролик. Щонайменше, один привід 92952 6 ний ролик навантажує накопичену у накопичувачі петлі смугу згідно з управляючим сигналом. При цьому управляючий пристрій визначає управляючий сигнал так, що різниця між натягом на стороні входу і на стороні виходу змінюється у напрямі заданої різниці натягу. За рахунок цього досягається заданий хід зміни натягу в накопиченій у накопичувачі петлі смузі від входу накопичувача до виходу накопичувача. Крім того, за рахунок цього забезпечується відносно просте визначення управляючого сигналу. Переважно, величина заданої різниці натягу значно менше, ніж натяг на стороні входу і натяг на стороні виходу. За рахунок цього досягається по суті рівномірний натяг смуги, поки вона знаходиться у накопичувачі петлі. Переважно, задана різниця натягу має навіть величину нуль. Як правило, між входом накопичувача і виходом накопичувача є додатково, щонайменше, до одного привідного ролика непривідні ролики. Переважно, число непривідних роликів більше числа привідних роликів. За рахунок цього можна утримувати мінімальними витрати на техніку управління, а також витрати на конструктивне виконання. Коли число привідних роликів складає, щонайменше, три, то між кожними двома привідними роликами переважно знаходиться стільки ж непривідних роликів. За рахунок цього забезпечується рівномірне навантаження на розтяг смуги. Крім того, за рахунок цього полегшується визначення управляючих сигналів. Можливо, що накопичувачпетлі має декілька розташованих послідовно одна за одною ділянок накопичувача. В цьому випадку можливо, що для кожної ділянки накопичувача задається власний заданий коефіцієнт заповнення, і кожна ділянка накопичувача працює так, що дійсний коефіцієнт заповнення кожної ділянки накопичувача наближається до заданого коефіцієнта заповнення. За рахунок цього можлива гнучка робота накопичувача петлі. Переважно, у разі наявності декількох розташованих послідовно одна за одною ділянок накопичувача, щонайменше, в двох ділянках накопичувача розташований, щонайменше, один привідний ролик. В цьому випадку управляючий пристрій визначає для кожного привідного ролика залежно від натягу на стороні входу і натягу на стороні виходу відповідний управляючий сигнал і подає на відповідний привідний ролик. Накопичена у накопичувані петлі смуга навантажується кожним привідним роликом згідно з відповідним управляючим сигналом. Не дивлячись на незалежні один від одного коефіцієнти заповнення окремих ділянок накопичувача, в цьому випадку управління привідними роликами виконують так, що встановлюється бажаний натяг смуги. Інші переваги і подробиці випливають з приведеного нижче опису прикладів виконання з посиланнями на прикладені креслення, на яких схемно зображено: Фіг.1 - блок-схема накопичувача петель і Фіг.2 - 5 - графічні схеми послідовності операцій. 7 На Фіг.1 схемно показана конструкція накопичувача петлі, за допомогою якого забезпечується можливість накопичення ділянки смуги 1. Петельний накопичувач має вхід 2 накопичувача, на якому у накопичувач петлі подається смуга 1. Подача здійснюється з вхідною швидкістю v1. Вхід 2 накопичувача може бути виконаний, як показано на Фіг.1, наприклад, у вигляді S-подібного ролика. Крім того, накопичувач петлі має вихід 3 накопичувача. Через вихід 3 накопичувача смуга 1 видається з накопичувача петлі. Видача відбувається з вихідною швидкістю v2. Вихід 3 накопичувача може бути виконаний так само, як вхід 2 накопичувача, у вигляді S-подібного ролика 3. Між входом 2 накопичувача і виходом 3 накопичувача розташована велика кількість верхніх роликів 4 і нижніх роликів 5, 6. Нижні ролики 5, 6 розташовані, як правило нерухомо. Щонайменше, один з нижніх роликів 5, 6, в даному випадку позначені позицією 6 ролики, є привідними роликами. Верхні ролики 4 розташовані, як правило, на траверсах 7. Траверси 7 встановлені з можливістю піднімання і опускання. За рахунок піднімання, відповідно, опускання траверс 7 можна встановлювати дійсний коефіцієнт заповнення накопичувача петлі (тобто зрештою довжину накопиченої у накопичувачі петлі смуги 1). Крім того, накопичувач петлі має направляючі ролики 8. Направляючі ролики 8 виконані з можливістю перекидання. За допомогою направляючих роликів 8 можна здійснювати вплив на бічний відхід смуги 1, зокрема, в сенсі запобігання і/або усунення. Крім того, накопичувач петлі має розташований на стороні входу пристрій 9 вимірювання натягу і розташований на стороні виходу пристрій 10 вимірювання натягу. За допомогою вхідного пристрою 9 вимірювання натягу можна вимірювати вхідний натяг Z1, який є в смузі 1 на вході 2 накопичувача. За допомогою вихідного пристрою 10 вимірювання натягу можна вимірювати вихідний натяг Z2, який є в смузі 1 на виході 3 накопичувача. Нарешті, накопичувач петлі має управляючий пристрій 11. Управляючий пристрій 11 програмується за допомогою управляючої програми 12. Управляюча програма 12 записана на носії 13 даних (наприклад, CD-ROM 13), у читаному виключно машиною вигляді. За допомогою носія даних 13 управляючу програму 12 можна вводити в управляючий пристрій 11 і тим самим програмувати управляючий пристрій 11. На основі програмування за допомогою управляючої програми 12 управляючий пристрій 11 управляє накопичувачем петлі згідно із способом роботи, який пояснюється нижче з посиланнями на Фіг.2. Додатково до цього робляться посилання на Фіг.1. Як показано на Фіг.2, управляючий пристрій 1 на стадії S1 приймає задану величину натягу Z*. Наприклад, не зображений на Фіг.1 оператор може вводити в управляючий пристрій 11 заданий натяг Z*. Як альтернативне рішення, заданий натяг Z* може бути заданий управляючою програмою 12. 92952 8 Як інше альтернативне рішення, заданий натяг Z* може визначатися зовнішніми умовами (наприклад, робочим станом розташованої після накопичувача петлі установки). В рамках даного винаходу не має значення, яким чином вводиться заданий натяг Z*. На стадії S2 управляючий пристрій 11 визначає зміну F* заданого коефіцієнта заповнення накопичувача петлі. Як правило, управляючий пристрій 11 визначає зміну F* заданого коефіцієнта заповнення на основі тимчасового такту, з яким він працює, у з'єднанні з вхідною швидкістю v1 і вихідною швидкістю v2. На стадії S2 управляючий пристрій 11 приймає з пристроїв 9, 10 вимірювання натягу виміряні пристроями 9, 10 величини натягу Z1, Z2. На стадії S3 управляючий пристрій 11 визначає зміну h* заданого стану підйому для траверс 7. Він визначає зміну h* заданого стану підйому у вигляді функції зміни F* заданого коефіцієнта заповнення, заданого натягу Z*, а також, щонайменше, одного з обох натягів Z1, Z2. Зміна h* заданого стану підйому може відповідати, зокрема, заданому значенню моменту або швидкості. Стадія S4 буде детально пояснена нижче застосовно до Фіг.3. На стадії S5 управляючий пристрій 11 визначає для кожного привідного нижнього ролика 6 задане значення моменту m* або задане значення швидкості обертання n*. Він визначає задані значення m*, n* залежно від положення відповідного привідного нижнього ролика 6 у накопичувачі петлі, вхідної швидкості v1, вихідної швидкості v2, зміни h* заданого стану підйому, а також обох натягів Z1, Z2. Стадія S5 буде детально пояснена нижче застосовно до Фіг.4. На стадії S6 управляючий пристрій 11 передає зміну h* заданого стану підйому на траверси 7. Крім того, він видає в рамках стадії S6 задані значення m*, n* на привідні ролики 6. Задані значення m*, n* відповідають в даному винаході управляючим сигналам. Траверси 7 відповідно переставляються на основі отриманої зміни h* заданого стану підйому. Таким чином, дійсний коефіцієнт заповнення накопичувача петлі узгоджується у відповідності з визначеною зміною F* заданого коефіцієнта заповнення. Дійсний коефіцієнт заповнення накопичувача петлі, щонайменше, наближається до відповідного заданого коефіцієнта заповнення. Таким же чином привідні ролики 6 навантажують накопичену у накопичувачі петлі смугу 1 згідно із заданими значеннями m*, n*. На стадії S7 управляючий пристрій 11 перевіряє, чи необхідно завершувати управління накопичувачем петлі. Коли це так (наприклад, при зупинці накопичувача петлі), то спосіб, згідно з Фіг.2, закінчений. В іншому випадку управляючий пристрій 11 повертається на стадію S1 або на стадію S2. Для здійснення стадії S4 на Фіг.2 можливі різні шляхи. Так, наприклад, стадію S4 можна виконувати як замкнутий однозначний процес визначення. Як показано на Фіг.3, переважним є таке виконання: 9 На стадії S11 управляючий пристрій 11 визначає спочатку зміну h* заданого стану підйому у вигляді функції зміни F* заданого коефіцієнта заповнення. Потім на стадії S12 управляючий пристрій 11 визначає на основі вхідного натягу Z1 і/або вихідного натягу Z2 ефективний натяг Z. Наприклад, управляючий пристрій 11 може приймати як ефективний натяг Z одне з обох натягів Z1, Z2. Як альтернативне рішення, управляючий пристрій 11 може визначати, наприклад, середнє значення обох натягів Z1, Z2. На стадії S13 управляючий пристрій 11 перевіряє, чи є ефективний натяг Z більше заданого натягу Z*. Якщо це так, то управляючий пристрій 11 знижує на стадії S14 зміну h* заданого стану підйому на величину корекції, яка залежить від різниці ефективного натягу Z і заданого натягу Z*. Коли ефективний натяг Z не перевищує заданий натяг Z*, то управляючий пристрій 11 на стадії S15 перевіряє, чи є ефективний натяг Z менше заданого натягу Z*. Коли це так, то управляючий пристрій 11 на стадії S16 збільшує зміну h* заданого стану підйому на величину корекції, яка залежить від різниці ефективного натягу Z і заданого натягу Z*. На Фіг.3 показано, що зміна h* заданого стану підйому по суті визначається зміною F* заданого коефіцієнта заповнення. Проте вона залежить також, навіть якщо в меншій мірі, від відхилення ефективного натягу Z від заданого натягу Z*. Аналогічним чином, стадію S5 можна також здійснювати у вигляді одноманітної стадії. Проте, як показано на Фіг.4, переважним є таке виконання: На стадії S21 управляючий пристрій 11 визначає задані значення n* швидкості обертання для привідних роликів 6 у вигляді функції вхідної швидкості v1, вихідної швидкості v2 і зміни h* заданого стану підйому. На стадії S22 управляючий пристрій 11 визначає на основі вихідного натягу Z2 і вхідного натягу Z1 різницю Z натягу. На стадії S23 управляючий пристрій 11 перевіряє, чи є різниця Z натягу більше заданої різниці Z* натягу. Якщо це так, то управляючий пристрій 11 на стадії S24 збільшує задані величини n* швидкості обертання для привідних роликів 6. Коли різниця Z натягу не перевищує задану різницю Z* натягу, то управляючий пристрій 11 на стадії S25 перевіряє, чи є різниця Z натягу менше заданої різниці Z* натягу. Якщо це так, то управляючий пристрій 11 на стадії S26 зменшує задані значення n* швидкості обертання для привідних роликів 6. Як показано на Фіг.4, задані величини n* швидкості обертання по суті визначаються швидкостями v1, v2 і зміною h* заданого стану підйому. Проте вони залежать також, хоча і у меншій мірі, від натягів Z1 і Z2. Зокрема, вони залежать від того, чи є різниця Z натягу більше або менше заданої різниці Z* натягу. В обох випадках задані величини n* швидкості обертання для привідних роликів 6 виправляються так, що різниця Z натягу зміщується у напрямі заданої різниці Z* натягу. 92952 10 Вказаний вище застосовно до Фіг.4 спосіб реалізується аналогічним чином, коли замість заданих величин n* швидкості обертання необхідно визначати задані значення m* моменту. Задана різниця Z* натягу може у принципі мати будь-яке значення. Переважно, величина заданої різниці Z* натягу значно менше вхідного натягу Z1 і вихідного натягу Z2. Зокрема, задана різниця Z* натягу може дорівнювати нулю. Можливо, що всі ролики 4, 5, 6 є привідними. Як правило, щонайменше, верхні ролики 4 не є привідними. Тому між входом 2 накопичувача і виходом 3 накопичувача додатково до привідних роликів 6 є непривідні ролики 4, 5. Крім того, можливо, що всі нижні ролики 5, 6 є привідними. Проте, як показано на Фіг.1, лише частина нижніх роликів 5, 6 є привідними, а саме, позначені позицією 6 привідні нижні ролики. Тому в результаті число непривідних роликів 4, 5 більше числа привідних роликів 6. Коли не всі ролики 4, 5, 6 є привідними, то привідні ролики 6 звичайно розподілені довільно між входом 2 накопичувача і виходом 3 накопичувача. Число привідних роликів 6 у принципі також є довільним. Як правило, число привідних роликів 6 більше 2. Таким чином, воно складає, щонайменше, 3. Згідно з Фіг.1, передбачено навіть чотири привідних ролики 6. Як показано на Фіг.1, між кожними двома привідними роликами 6 розташована однакова кількість непривідних роликів 4, 5. Це справедливо переважно незалежно від того, чи вважаються, додатково до верхніх роликів 4 і непривідних нижніх роликів 5, направляючі ролики 8 непривідними роликами. Можливо, що накопичувач петлі завжди працює одноманітно. Наприклад, накопичувач петлі може мати лише одну єдину траверсу 7. Проте і при виконанні, згідно з Фіг.1, в якому є декілька траверс 7, можлива одноманітна робота. В цьому випадку необхідно завжди однаково управляти всіма траверсами 7. Кожна траверса 7 задає ділянку 14 накопичувача, при цьому ділянки 14 накопичувача розташовані послідовно одна за одною. При відповідному виконанні управляючого пристрою 11 можлива робота ділянок 14 накопичувача незалежно одна від одної. Це пояснюється нижче з посиланнями на Фіг.5. Фіг.5 має ту ж принципову побудову, що і Фіг.2. Тому нижче пояснюються лише відмінності від Фіг.2. На Фіг.5 стадію S2 замінено на стадію S31. На стадії S31 управляючий пристрій 11 визначає для кожної ділянки 14 накопичувача власне зміни Fi* заданого коефіцієнта заповнення (і є покажчиком для кожної ділянки 14 накопичувача). Визначення зміни Fi* заданого коефіцієнта заповнення саме по собі відоме. Наприклад, окремі ділянки 14 накопичувача можна вимикати, так що вони працюють постійно з коефіцієнтом заповнення 50%. Крім того, як показано на Фіг.5, стадія S4 замінена на стадію S32. На стадії S32 управляючий пристрій 11 визначає окремо для кожної ділянки 14 накопичувача зміну hі* заданого стану підйому. 11 В даному випадку і також є покажчиком відповідної ділянки 14 накопичувача. В кожну ділянку 14 накопичувача окремо видається відповідна зміна hi* заданого стану підйому. Таким чином, кожна ділянка 14 накопичувача працює так, що дійсний коефіцієнт заповнення відповідної ділянки 14 накопичувача наближається до відповідного заданого коефіцієнта заповнення. У протилежність цьому стадія S5 при виконанні згідно Фіг.5 залишається. Таким чином, управляючий пристрій 11 визначає також при виконанні згідно з Фіг.5 для кожного привідного ролика 6 залежно від вхідного натягу Z1 і вихідного натягу Z2 відповідне задане значення m*, n* моменту, відповідно, швидкості обертання, і видає його на відповідний привідний ролик 6. Таким чином, накопичена у накопичувачі петлі смуга навантажується кожним привідним роликом 6 згідно із заданим значенням m*, n*. Це залишається справедливим, хоча привідні ролики 6 розподілені по ділянках 14 накопичувача, і для ділянок 14 накопичувача задаються різні зміни hi* заданого стану підйому. 92952 12 Єдина відмінність полягає в тому, що в рамках стадії S32 при визначенні заданого значення n* швидкості обертання для кожного привідного ролика враховується зміна hі* заданого стану підйому ділянки 14 накопичувача, в якому розташований відповідний привідний ролик 6. За допомогою даного винаходу забезпечується простим чином переважна у порівнянні з рівнем техніки робота накопичувача петлі. Оскільки у накопичувачах петлі, згідно з рівнем техніки, все ще вимірюють вихідний натяг Z2, а в деяких накопичувачах петлі, згідно з рівнем техніки, вимірюють також вихідний натяг, то переобладнання вимагає лише узгодження управляючої програми 12 управляючого пристрою 11, при необхідності з додаванням пристрою 9 вимірювання натягу на стороні входу. Приведений вище опис служить виключно для пояснення даного винаходу. У протилежність цьому об'єм захисту даного винаходу визначається виключно прикладеною формулою винаходу. 13 92952 14 15 92952 16 17 Комп’ютерна верстка А. Крижанівський 92952 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of operation of looping pit, data medium and looping pit
Автори англійськоюSchulze Bertram
Назва патенту російськоюСпособ работы накопителя петли, носитель данных и накопитель петли
Автори російськоюШульце Бертрам
МПК / Мітки
МПК: B65H 20/00
Мітки: накопичувач, спосіб, роботи, даних, петлі, носій, накопичувача
Код посилання
<a href="https://ua.patents.su/9-92952-sposib-roboti-nakopichuvacha-petli-nosijj-danikh-ta-nakopichuvach-petli.html" target="_blank" rel="follow" title="База патентів України">Спосіб роботи накопичувача петлі, носій даних та накопичувач петлі</a>
Спосіб керування доступом станції даних до мобільних носіїв даних, мобільний носій даних, станція даних і система для здійснення способу
Номер патенту: 46781
Опубліковано: 17.06.2002
Автор: Райнер Роберт
МПК: G06K 7/00, G06K 17/00, G06K 19/07, H04L 12/407
Мітки: здійснення, мобільній, система, станції, даних, спосіб, станція, керування, мобільних, носій, носіїв, способу, доступом
Формула / Реферат:
1. Спосіб керування доступом станції даних (61) до щонайменше двох мобільних носіїв даних (51), при якому ці носії даних на вимогу станції даних синхронно передають свої ідентифікаційні номери, і станція даних визначає, чи приймаються щонайменше в одному двійковому розряді прийнятих ідентифікаційних номерів два різних значення біта, і потім, якщо принаймні в одному двійковому розряді прийнятих ідентифікаційних номерів будуть визначені як...
Спосіб придбання електронних даних із застосуванням носія даних і відповідний носій даних
Номер патенту: 55556
Опубліковано: 15.04.2003
Автор: Борн Крістіне
МПК: G07F 7/08, G07F 19/00, G07F 17/00
Мітки: придбання, носій, електронних, застосуванням, носія, відповідний, спосіб, даних
Формула / Реферат:
1. Спосіб придбання електронних даних (D2) із застосуванням носія (1) даних, що містить процесор (2) і запам'ятовуючий пристрій (М1), згідно з яким:- встановлюють зв'язок між носієм (1) даних і розрахунковим пристроєм (3),- передають між процесором (2) носія (1) даних і розрахунковим пристроєм (3) інформацію (D1) стосовно операції оплати, яка має бути здійснена у зв'язку з придбанням даних (D2), внаслідок чого перераховується...
Записний носій даних із областю захищених даних, спосіб записування на нього та пристрої для записування/відтворення даних
Номер патенту: 76094
Опубліковано: 17.07.2006
Автори: Ліннарц Йохан П.М.Г., Калкер Антоніус А.С.М., Тальстра Йохан К.
МПК: G11B 20/00
Мітки: областю, записний, даних, записування, пристрої, захищених, спосіб, нього, носій
Формула / Реферат:
1. Спосіб записування даних на перезаписний носій даних, що має доступну тільки для читання область незмінних даних і записну область даних, в якому в згадану записну область даних записують системні дані, і який відрізняється тим, що генерують криптографічну контрольну суму згаданих системних даних і записують її в згадану область незмінних даних, де згадана криптографічна контрольна сума використовується для перевірки згаданих системних...
Носій даних для безконтактного прийому даних і енергії та спосіб його експлуатації
Номер патенту: 54501
Опубліковано: 17.03.2003
Автор: Райнер Роберт
МПК: H02J 17/00, G06K 7/00, H04B 5/02, G06K 17/00, H04L 27/06, G06K 19/07
Мітки: носій, спосіб, безконтактного, енергії, експлуатації, прийому, даних
Формула / Реферат:
1. Носій даних, зокрема, чіп-картка, який відрізняється тим, що містить:котушку (L) для безконтактного прийому даних та енергії і для безконтактної передачі даних;логічну схему (LS) для обробки прийнятих демодульованих і декодованих даних;перший демодулятор (DEM100) для демодуляції прийнятих 100% модульованих за системою ASK сигналів;другий демодулятор (DEM10) для демодуляції прийнятих модульованих за системою ASK...
Спосіб, система і носій даних для здійснення високошвидкісної передачі даних по низхідній лінії зв’язку
Номер патенту: 86364
Опубліковано: 27.04.2009
Автори: Ахсан Сієд Надім, Мудігонда Равішанкер
МПК: H04W 28/00, H04L 12/56
Мітки: низхідній, лінії, носій, зв'язку, високошвидкісної, спосіб, система, здійснення, даних, передачі
Формула / Реферат:
1. Спосіб високошвидкісної передачі даних у системі зв'язку, що включає в себе:відстежування рівня сигналу для сигналів, отриманих від активного набору базових станцій;визначення скороченого активного набору базових станцій на основі елементів згаданого активного набору базових станцій, від яких отримані високошвидкісні передачі даних;виявлення заздалегідь визначеної сукупності станів на основі відстеженого рівня сигналу;...
Попередній патент: Циліндровий механізм замка та відповідний ключ
Наступний патент: Пристрій для кріплення фурнітурних деталей на порожнистих камерних профілях
Випадковий патент: Спосіб виробництва порошку з листя волоського горіха