Пристрій для рятування частини літального апарата, що відокремлюється, та спосіб його використання
Номер патенту: 98106
Опубліковано: 25.04.2012
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
Формула / Реферат
1. Пристрій для рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який включає систему керування ступеня і рятівну двигунну установку, інформаційні входи-виходи яких з'єднані між собою, який відрізняється тим, що в нього додатково введений датчик просторового кута атаки, установлений на ступені, а рятівна двигунна установка виконана у вигляді парного числа сопел, наприклад щілинних, і газонапірної арматури, що включає дросель, розташованих в порожнині бака або на його верхньому днищі, при цьому сопла розташовані щонайменше одним ярусом в частині ступеня, що вище його центра мас, в площині, перпендикулярній його поздовжній осі, симетрично цій осі і рівномірно по периметру перетину цієї площини з поверхнею ступеня, при цьому кожне сопло через газонапірну арматуру з'єднане з порожниною бака, причому інформаційний вхід кожного дроселя через систему керування ступеня з'єднаний з інформаційним виходом датчика просторового кута атаки.
2. Спосіб застосування пристрою для рятування частини літального апарата, оснований на виконанні маневру рятування частини літального апарата, що відокремлюється, який відрізняється тим, що визначають площину просторового кута атаки і потрібний керуючий момент, визначають найближчі до площини просторового кута атаки сопла, проекція суми моментів сил тяги яких відносно центра мас ступеня на напрямок потрібного керуючого моменту співпадає з ним, а потрібну кількість сопел визначають в залежності від величини керуючого моменту, розподіляють їх порівно з обох боків вказаної площини і подають в них газ із порожнини бака через відповідні цим соплам дроселі.
3. Спосіб застосування пристрою за п. 2, який відрізняється тим, що визначають середнє значення кута атаки за період коливань і, в разі його перевищення над модулем помилки його визначення, створюють керуючий момент в площині просторового кута атаки за напрямком, протилежним моменту, необхідному для розвертання ступеня на визначений середній кут атаки, при цьому прогнозують промах відносно точки прицілювання при наступному русі від поточного моменту часу до попадання в точку прицілювання і, в разі прогнозованого попадання в точку прицілювання, припиняють створення керуючого моменту, а потім повторюють наведені операції.
Текст
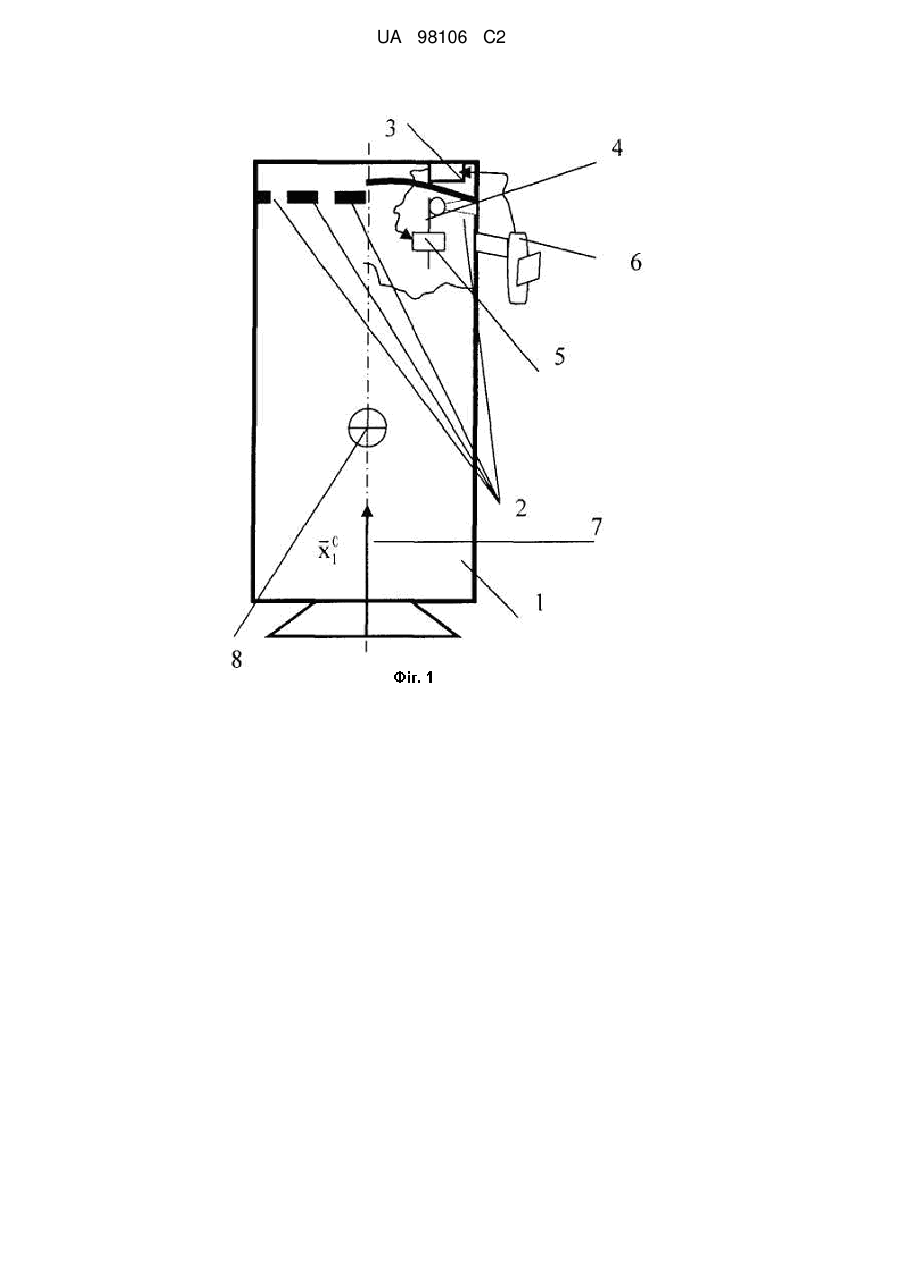
Реферат: Винахід належить до ракетно-космічної техніки, зокрема до літальних апаратів, наприклад ракет-носіїв, які здійснюють політ в атмосфері. Винахід забезпечує рятування частини літального апарата, що відокремлюється, при польоті в атмосфері з мінімальною складністю, підвищеною ефективністю за рахунок забезпечення достатньо високої точності попадання в район падіння та економічної витрати запасу енергетики. В пристрої для рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, що включає систему керування ступеня і рятівну двигунну установку, інформаційні входи-виходи яких з'єднані між собою, в нього додатково введений датчик просторового кута атаки, установлений на ступені, а рятівна двигунна установка виконана у вигляді парного числа сопел, наприклад щілинних, і газонапірної арматури, що включає дросель, розташованих в порожнині бака або на його верхньому днищі, при цьому сопла розташовані щонайменше одним ярусом в частині ступеня, що вище його центра мас, в площині, перпендикулярній його поздовжній осі, симетрично цій осі і рівномірно по периметру перетину цієї площини з поверхнею ступеня, при цьому кожне сопло через газонапірну арматуру з'єднане з порожниною бака, причому інформаційний вхід кожного дроселя через систему керування ступеня з'єднаний з інформаційним виходом датчика просторового кута атаки. В способі застосування пристрою, основаному на виконанні маневру рятування частини літального апарата, визначають площину просторового кута атаки і потрібний керуючий момент, визначають найближчі до площини просторового кута атаки сопла, проекція суми моментів сил тяги яких відносно центра мас ступеня на напрямок потрібного керуючого моменту співпадає з ним, а потрібну кількість сопел визначають в залежності від величини керуючого моменту, розподіляють їх нарівно з обох боків вказаної площини і подають в них газ із порожнини бака через відповідні цим соплам дроселі. UA 98106 C2 (12) UA 98106 C2 UA 98106 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до ракетно-космічної техніки, зокрема до літальних апаратів (ЛА), здебільшого частин ракет-носіїв, що відокремлюються, які здійснюють спуск в атмосфері. Відомі гальмівні пристрої для рятування відокремлюваних елементів конструкції ракет типу парашутів [1], аеродинамічних екранів [2] і гальм [3], балонів, зв'язаних тросами зі ступенем [4]. Недоліками цих рішень є підвищена складність із-за необхідності використання додаткових пристроїв, невелика точність влучання в район падіння внаслідок збурень на ділянці спуску в атмосфері, знижена масово-енергетична ефективність ЛА внаслідок необхідності виведення додаткових мас пристроїв, що не використовуються безпосередньо для виведення корисного навантаження. Відомий також пристрій для рятування ступеня ракети, який включає подовжені кумулятивні заряди для розрізання корпусу в поперечних площинах, перпендикулярних до поздовжньої осі, та троси, які зв'язують частини ступеня, що відокремлюються одна від одної [5]. Недоліком пристрою є порушення цілісності ступеня, що рятується. Найбільш близьким аналогом є відокремлюваний ступінь ракети, що повертається, [6], що додатково оснащена рятівною двигунною установкою і системою керування ступеня. Її недоліками є: підвищена складність внаслідок використання потужних двигунів для виконання маневрів повернення на землю та складної системи керування (СК) для виконання маневрів та керування системами ступеня, оскільки повернення ступеня потребує таких же складних дій, як і виведення на орбіту; знижена масово-енергетична ефективність внаслідок неповного використання енергетичних можливостей ступеня і необхідності виведення додаткових запасів палива, які використовуються лише для маневру повернення ступеня, а також невикористання додаткових двигунів на активній ділянці траєкторії виведення ракетою корисного вантажу. Відомий спосіб керування апаратом, що спускається в атмосфері, (СА) [7, с. 267], відповідно до якого СА орієнтують на задані кути атаки та крену, причому кут атаки формують в заданому діапазоні величин. Відомий спосіб рятування пілотованого апарата [8], що полягає у русі по програмі заданої орієнтації відносно набігаючого потоку (кута атаки). Найбільш близьким аналогом є спосіб повернення відокремлюваного ступеня ракети [6] шляхом запуску її двигунів і виконання маневру повернення на поверхню планети. Недоліки всіх вищенаведених технічних рішень [7], [8] полягають у необхідності забезпечення апарата, що спускається, повертається або рятується, значним запасом статичної стійкості або оснащення керуючими пристроями з суттєвими керуючими зусиллями. Якщо запаси або зусилля малі, то це призводить до значного коливального руху навколо центра мас і великої ймовірності появи режимів пікірування або кабрування (середніх за період коливання значень кутів атаки відповідного знаку), що і є причиною великих відхилень від точки прицілювання. Крім того, ці рішення енергетично неефективні, оскільки потребують підвищеної витрати палива на маневр внаслідок безперервної роботи двигунів для виконання керуючих та стабілізаційних рухів. В основу винаходу поставлена задача розробки пристрою для рятування частини літального апарата, що відокремлюється, при польоті в атмосфері мінімальної складності, підвищеної ефективності за рахунок забезпечення можливості його використання на активній ділянці траєкторії виведення корисного вантажу на орбіту із забезпеченням достатньо високої точності влучання в район падіння та з мінімальною потребою в запасах енергії. В основу винаходу поставлена задача розробки способу використання пристрою для рятування частини літального апарата, що відокремлюється, при польоті в атмосфері мінімальної складності, підвищеної ефективності за рахунок забезпечення достатньо високої точності влучання в район падіння та економічної витрати запасу енергетики. Поставлена задача вирішується тим, що в пристрої для рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який включає систему керування ступеня і рятівну двигунну установку, інформаційні входи-виходи яких з'єднані між собою, в нього додатково введений датчик просторового кута атаки, установлений на ступені, а рятівна двигунна установка виконана у вигляді парного числа сопел, наприклад щілинних, і газонапірної арматури, що включає дросель, розташованих в порожнині бака або на його верхньому днищі, при цьому сопла розташовані щонайменше одним ярусом в частині ступеня, що вище його центра мас, в площині, перпендикулярній його поздовжній осі, симетрично цій осі і рівномірно по периметру перетину цієї площини з поверхнею ступеня, при цьому кожне сопло через газонапірну арматуру з'єднано з порожниною бака, причому інформаційний вхід кожного 1 UA 98106 C2 5 10 15 20 25 30 35 40 45 50 55 60 дроселя через систему керування ступеня з'єднано з інформаційним виходом датчика просторового кута атаки. Поставлена задача вирішується також тим, що в способі застосування пристрою для рятування частини літального апарата, основаному на виконанні маневру рятування частини літального апарата, визначають площину просторового кута атаки і потрібний керуючий момент, визначають найближчі до площини просторового кута атаки сопла, проекція суми моментів сил тяги яких відносно центра мас ступеня на напрямок потрібного керуючого моменту співпадає з ним, а потрібну кількість сопел визначають в залежності від величини керуючого моменту, розподіляють їх порівно з обох боків вказаної площини і подають в них газ із порожнини бака через відповідні цим соплам дроселі. Визначають середнє значення кута атаки за період коливань і, в разі його перевищення над модулем помилки його визначення, створюють керуючий момент в площині просторового кута атаки за напрямком, протилежним моменту, необхідному для розвертання ступеня на визначений середній кут атаки, при цьому прогнозують промах відносно точки прицілювання при наступному русі від поточного моменту часу до попадання в точку прицілювання і, в разі прогнозованого попадання в точку прицілювання, припиняють створення керуючого моменту, а потім повторюють наведені операції. Ступінь ракети є його основним агрегатом, що забезпечує виведення корисного вантажу на цільову орбіту. Після вироблення палива ступінь відокремлюється і по балістичній траєкторії спускається на землю. Рятування ступеня можливо, зокрема, за умови зниження кінетичної енергії в момент зустрічі з поверхнею та високої точності влучання в район падіння, що полегшує його пошук та евакуацію. Керування ступенем після відокремлення від ракети-носія (РН) можливо, якщо він оснащений виконавчими органами та джерелами енергії для приведення їх в дію. Будь-які додаткові пристрої, в тому числі місця розміщення для джерела енергії та матеріальне джерело її (паливо або інше робоче тіло), які не використовуються для досягнення основної задачі виведення на орбіту корисного навантаження, це додаткова маса, що приводить до зниження масово-енергетичної ефективності ступеня та РН в цілому. Для технічного рішення, що заявляється, характерне використання як джерела енергії газу наддування, що зостається в баках ступеня, та власне баків як сховища енергії. Для твердопаливних ракет тиск в баці вище зовнішнього тиску навіть якщо не виконується відсічка тяги і порожнина сполучається з зовнішнім середовищем, тому що газ виходить не миттєво. Оскільки центр мас ступеня після відділення знаходиться ближче до хвоста, де розташований двигун, то ступінь в номіналі після входу в атмосферу рухається хвостом уперед. Повітря заходить в порожнину бака і внаслідок його підвищеної в порівнянні з атмосферою температури нагрівається, розширяється і тиск його вище ніж в атмосфері. Поза атмосферою та в її розріджених шарах заявлена рятівна двигунна установка (ДУ) створює тягу, поки не впаде витрата газу, а потім, доки тиск в баках вище зовнішнього, вона працює як інтерцептор за рахунок вдування газу в набігаючий потік, що створює локальну зону підвищеного тиску. На активній ділянці руху ступеня в складі РН додаткова рятівна ДУ може бути використана безпосередньо для керування польотом. Ефективність ДУ з падінням висоти також зменшується. Основною причиною промаху ступеня відносно точки прицілювання є поява режимів пікірування (РП) або кабрування (РК). Найбільш ймовірний режим руху ступеня на спуску в атмосфері навколо центра мас в площині польоту - це коливальний, що представляє проблему для визначення появи вказаних РП або РК. Причому можливі тільки три режими - коливань навколо нульового значення просторового кута атаки (ПКА), РП та РК. Всі вони для статистично значимого числа пусків практично рівноймовірні для ЛА з нейтральною та малою статичною стійкістю. Використання традиційних способів керування рухом, коли воно виконується безперервно (навіть для дискретних систем керування внаслідок досить малого кроку власне дискретизації) - водночас вимірювання і формування керуючого сигналу з видачею його на виконавчі органи, призводить до передчасної видачі газу і зниження ефективності. Дійсно, реалізація, наприклад ПІД (пропорційноінтегрально-диференційного) регулятора забезпечить витримування величини просторового кута атаки, близького до нульового значення і демпфірування коливань, що потребує значних видатків газу через ДУ. В способі, що заявляється, процес керування починається лише після визначення початку РП або РК. Визначення виконується завдяки осередненню ПКА на періоді коливань. Це може бути здійснено і за допомогою "вікна, що ковзає" (змінного масштабу часу вимірювань, що 2 UA 98106 C2 5 10 15 20 25 потребує запам'ятовування минулих вимірювань в стеку запам'ятовуючого пристрою системи керування). Як тільки середнє значення ПКА стає більше помилки його визначення, це означає, що реалізувався один з режимів - РК або РП. Тоді створюється керуючий момент, направлений на компенсування прогнозованого промаху на місцевості, причому прогнозування ведеться з урахуванням наступного руху, найімовірніше коливального. Керування (створення керуючого моменту) припиняється, як тільки досягається нульовий прогнозований промах. Поява режимів РК та РП після цього теж має вірогідний характер, вони можуть і не з'явитися. Тому знову повторюється цикл нагляду за режимом руху на періоді коливань. Керуючий момент створюється знову лише в разі появи потреби. Це економить подачу газу. Розташування сопел по периметру бокової поверхні ступеня в умовах некерованого обертання ступеня по крену дає можливість формувати керуючий момент в площині ПКА за рахунок відповідного вибору сопел, що задіюються, в напрямку, зворотному до напрямку обертання по крену. Оскільки сопла розташовані з кутовим кроком, то в кожний момент часу буде формуватися нескомпенсована тяга в боковому напрямку, що призводить до промаху на місцевості по боку. Але внаслідок тієї ж дискретності та обертання по крену бокова проекція сумарної тяги буде змінюватися за значенням та знаком, тобто відбуватися самокомпенсація промаху. Крім того, похідні промаху по боку від параметрів поступового руху набагато менші за такі ж похідні по дальності. Тому вплив нескомпенсованого імпульсу бокової тяги буде незначним. Відсутність же керуючих сопел в каналі крену спрощує, здешевлює та робить легшу конструкцію. Суть винаходу демонструється на кресленні. На Фіг. 1 зображено головний вигляд пристрою, на Фіг. 2 - вигляд зверху, на Фіг. 3 - пристрій в дії, на Фіг. 4 - схема передачі даних, на Фіг. 5 -схема використання пристрою, на Фіг. 6 - схема компенсації промаху за допомогою пристрою. На Фіг. 1 і Фіг. 2 показано ступінь (С) 1 з щілинними соплами (ЩС) 2, виконаними в стінці бака, системою керування СК 3 та газонапірною арматурою 4 з дроселем (Д) 5, датчиком ПКА (ДПКА) 6, розташованими в порожнині бака. Інформаційний вихід ДПКА 6 зв'язаний з інформаційним входом СК 3, інформаційні виходи якої зв'язані з інформаційними входами Д 5. 0 30 35 40 45 50 55 На Фіг. 1 також показано поздовжню вісь ступеня 7 (вектор x1 ) та її центр мас 8. В польоті ДПКА 6 визначає площину ПКА 9 (див. Фіг. 3). Там же показано потрібний керуючий момент 10. Визначають найближчі до площини просторового кута атаки сопла, у яких проекції векторів тяг на напрямок потрібного керуючого моменту співпадають з ним. На Фіг. 3 пунктиром зі стрілкою показано напрямок обертання ступеня по крену, а напрямок вибору сопел для створення потрібного керуючого моменту в процесі спуску в атмосфері - суцільною лінією зі стрілкою. Потрібну кількість сопел визначають в залежності від величини керуючого моменту і розподіляють їх порівно з обох боків вказаної площини. Газ подають через відповідні дроселі 5 в визначені сопла. Тобто для створення керуючого моменту 10 відкривають Д 5 і подають газ в сопла верхньої (для фігури) напівплощини, через які створюється тяга P . ДПКА 6 визначає величину та орієнтацію площини ПКА 9 і передає дані на інформаційний вхід СК 3 (Фіг. 4), яка визначає сопла, через які потрібно подавати газ і видає команду на відкриття відповідних до вибраних сопел дроселі 5 на їхні інформаційні входи. Ракета із двох послідовних ступенів (Фіг. 5), першим із яких є С 1, виводиться по траєкторії 11 до моменту розділення ступенів. Керування ракетою відбувається за допомогою двигунів рятівної ДУ. Після відокремлення С 1 від другого ступеня 12 в точці траєкторії 13 остання рухається далі по своїй траєкторії виведення 14, а С 1 - по траєкторії 15 до попадання на землю в точку 16. С 1 рухається по номінальній траєкторії 17 (Фіг. 6) до попадання в точку прицілювання 18. В збуреному русі реалізується траєкторія з режимом кабрування 19, який веде до промаху відносно точки прицілювання. Відповідно до способу, що заявляється, завдяки ДПКА 6 визначають середнє значення ПКА за період коливань. З цього моменту починають керування компенсацію промаху. Якщо ПКА перевищує модуль помилки його визначення, то створюють керуючий момент 10 в площині ПКА 9 за напрямком, протилежним моменту, необхідному для розвертання ступеня на визначений середній кут атаки. При цьому прогнозують кінцевий промах L(t) для поточного моменту часу t відносно точки прицілювання (ТП) 18 при наступному русі від t до попадання в ТП 18, наприклад, за формулою L( t ) де L ( t ) ( t ) , L ( t ) - поточне значення похідної дальності L по ПКА . 3 UA 98106 C2 5 10 15 20 25 На цьому етапі С 1 рухається по ділянці траєкторії 20. Якщо L(t) = 0, то припиняють створення керуючого моменту і далі рух відбувається по ділянці траєкторії 21. Наведені операції повторюються, якщо середнє значення ПКА більше за помилку його визначення. В нашому випадку режим кабрування зірвано і ступінь попадає в точку прицілювання 18. Але далі весь час визначається середнє за період коливань значення ПКА. Якщо виявиться РК або РП, то ділянки руху 20 знову будуть відновлюватися. Таким чином вирішена поставлена задача розробки пристрою для рятування частини літального апарата, що відокремлюється, при польоті в атмосфері та способу його використання мінімальної складності (проста за конструкцією рятівна двигунна установка, яка не потребує окремих баків з пальним, системи подачі пального та ін.; спрощений спосіб керування установкою з мінімальною потрібною навігаційною інформацією - тільки про просторовий кут атаки, із спрощеним прогнозом промаху), підвищеної ефективності (за рахунок забезпечення можливості використання рятівної двигунної установки і датчика ПКА на активній ділянці траєкторії виведення корисного вантажу на орбіту та мінімальної складності технічного рішення), із забезпеченням достатньо високої точності влучання в район падіння, з мінімальною потребою в запасах енергетики (відсутність окремих запасів палива на керування та мінімум додаткової маси введених додаткових елементів) та економічністю (конструктивно потрібний мінімум додаткових габаритів та мас, забезпечення мінімуму витрат газу при керуванні). Джерела інформації: 1) RU 2191140, В64D 17/80. 2) US 6076771 А, В64G 1/62. 3) JР 2934494В24163300, В64G 1/62. 4) US 3168266, НКВ 244-138. 5) UA 70266A, F42В 15/00, В64G 1/00. 6) US 6158693, B64G 1/00. 7) Сихарулидзе Ю.Г. Баллистика летательных аппаратов. - М.: Наука, 1982.-352 с. 8) UA 20362 В64G 1/00, F42В 15/00. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Пристрій для рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який включає систему керування ступеня і рятівну двигунну установку, інформаційні входи-виходи яких з'єднані між собою, який відрізняється тим, що в нього додатково введений датчик просторового кута атаки, установлений на ступені, а рятівна двигунна установка виконана у вигляді парного числа сопел, наприклад щілинних, і газонапірної арматури, що включає дросель, розташованих в порожнині бака або на його верхньому днищі, при цьому сопла розташовані щонайменше одним ярусом в частині ступеня, що вище його центра мас, в площині, перпендикулярній його поздовжній осі, симетрично цій осі і рівномірно по периметру перетину цієї площини з поверхнею ступеня, при цьому кожне сопло через газонапірну арматуру з'єднане з порожниною бака, причому інформаційний вхід кожного дроселя через систему керування ступеня з'єднаний з інформаційним виходом датчика просторового кута атаки. 2. Спосіб застосування пристрою для рятування частини літального апарата, оснований на виконанні маневру рятування частини літального апарата, що відокремлюється, який відрізняється тим, що визначають площину просторового кута атаки і потрібний керуючий момент, визначають найближчі до площини просторового кута атаки сопла, проекція суми моментів сил тяги яких відносно центра мас ступеня на напрямок потрібного керуючого моменту співпадає з ним, а потрібну кількість сопел визначають в залежності від величини керуючого моменту, розподіляють їх порівно з обох боків вказаної площини і подають в них газ із порожнини бака через відповідні цим соплам дроселі. 3. Спосіб застосування пристрою за п. 2, який відрізняється тим, що визначають середнє значення кута атаки за період коливань і, в разі його перевищення над модулем помилки його визначення, створюють керуючий момент в площині просторового кута атаки за напрямком, протилежним моменту, необхідному для розвертання ступеня на визначений середній кут атаки, при цьому прогнозують промах відносно точки прицілювання при наступному русі від поточного моменту часу до попадання в точку прицілювання і, в разі прогнозованого попадання в точку прицілювання, припиняють створення керуючого моменту, а потім повторюють наведені операції. 4 UA 98106 C2 5 UA 98106 C2 6 UA 98106 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for preservation of detachable part of aircraft and method of use thereof
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюУстройство для сохранения отделяемой части летательного аппарата и способ его использования
Автори російськоюДронь Николай Михайлович, Хорольский Пётр Георгиевич
МПК / Мітки
МПК: F42B 10/00, B64G 1/62
Мітки: рятування, апарата, відокремлюється, пристрій, літального, спосіб, частини, використання
Код посилання
<a href="https://ua.patents.su/9-98106-pristrijj-dlya-ryatuvannya-chastini-litalnogo-aparata-shho-vidokremlyuehtsya-ta-sposib-jjogo-vikoristannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для рятування частини літального апарата, що відокремлюється, та спосіб його використання</a>
Спосіб рятування частини літального апарата
Номер патенту: 88049
Опубліковано: 10.09.2009
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
МПК: F42B 15/00, B64G 1/00
Мітки: рятування, частини, літального, спосіб, апарата
Формула / Реферат:
Спосіб рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який полягає у формуванні заданої орієнтації ступеня відносно набігаючого потоку при польоті в атмосфері, який відрізняється тим, що при вході в атмосферу ступінь розвертають поздовжньою віссю перпендикулярно площині польоту і утримують його в такому положенні та закручують навколо поздовжньої осі.
Спосіб аварійного рятування літального апарата
Номер патенту: 49951
Опубліковано: 15.10.2002
Автори: Савченко Микола Федорович, Савченко Микола Миколайович
МПК: B64D 17/00
Мітки: аварійного, рятування, спосіб, апарата, літального
Формула / Реферат:
1. Спосіб аварійного рятування літального апарата, за допомогою парашута, попередньо у складеному вигляді, змонтованому у щілиноподібному технологічному люці з системою його розкриття під час аварії для вивільнення парашута і під дією повітряного потоку подальшого розгортання купола парашута для зменшення швидкості падіння і стабілізації розташування літального апарата у просторі під час приземлення, який відрізняється тим, що вивільнення...
Спосіб стабілізації літального апарата і пристрій для його реалізації
Номер патенту: 70873
Опубліковано: 10.01.2008
Автори: Гринчишин Юрій Леонідович, Дронь Микола Михайлович, Хорольський Петро Георгійович, Пашков Анатолій Володимирович
МПК: F42B 15/00, B64G 1/00
Мітки: стабілізації, апарата, літального, пристрій, спосіб, реалізації
Формула / Реферат:
1. Спосіб стабілізації літального апарата на атмосферній ділянці траєкторії, що полягає у заборі набігаючого потоку, формуванні направленого струменя для створення бокової тяги в зоні носової частини літального апарата, який відрізняється тим, що відслідковують площину просторового кута атаки за допомогою симетричної V-подібної аеродинамічної поверхні, розміщеної в носовій частині і звільненої для обертання навколо поздовжньої осі літального...
Адаптивна система стабілізації космічного літального апарата
Номер патенту: 45233
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Вировець Аліна Володимирівна
МПК: B64G 1/24
Мітки: космічного, літального, адаптивна, апарата, стабілізації, система
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка має датчик кута, вихід якого під'єднаний до першого входу блока керування, датчик кутової швидкості, вихід якого під'єднаний до другого входу блока керування, а вихід блока керування через блок підсилювачів потужності підключений до релейних виконавчих органів, яка відрізняється тим, що в неї введені блок визначення збурюючого моменту, вихід якого під'єднаний до четвертого...
Адаптивний спосіб стабілізації космічного літального апарата
Номер патенту: 47349
Опубліковано: 25.01.2010
Автори: Бандура Іван Миколайович, Єрмолов Денис Олегович
МПК: B64G 1/24
Мітки: апарата, стабілізації, літального, спосіб, космічного, адаптивний
Формула / Реферат:
Адаптивний спосіб стабілізації космічного літального апарата, який полягає в тому, що вимірюють кут і кутову швидкість космічного літального апарата, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів, який відрізняється тим, що при збільшенні кута заданого значення однієї полярності визначають величину мінімального керуючого імпульсу шляхом вмикання, а потім вимкнення керуючого сигналу як тільки...
Попередній патент: Спосіб подання рекламної інформації
Наступний патент: Спосіб очищення рідини
Випадковий патент: Спосіб закріплення ґрунтового масиву під фундаментом споруди