Спосіб стабілізації літального апарата і пристрій для його реалізації
Номер патенту: 70873
Опубліковано: 10.01.2008
Автори: Пашков Анатолій Володимирович, Дронь Микола Михайлович, Гринчишин Юрій Леонідович, Хорольський Петро Георгійович
Формула / Реферат
1. Спосіб стабілізації літального апарата на атмосферній ділянці траєкторії, що полягає у заборі набігаючого потоку, формуванні направленого струменя для створення бокової тяги в зоні носової частини літального апарата, який відрізняється тим, що відслідковують площину просторового кута атаки за допомогою симетричної V-подібної аеродинамічної поверхні, розміщеної в носовій частині і звільненої для обертання навколо поздовжньої осі літального апарата, напрям стабілізуючої бокової тяги фіксують відносно площини просторового кута атаки, а величину бокової тяги регулюють в залежності від величини цього кута.
2. Пристрій для реалізації способу за п. 1, що містить розміщені в носовій частині літального апарата послідовно з'єднані повітрозабірник, вал-регулятор газового потоку, газохідні канали і бокові сопла, який відрізняється тим, що носова частина літального апарата оснащена симетричною V-подібною аеродинамічною поверхнею і з'єднана з його корпусом за допомогою обертального шарніра, вісь якого співпадає з поздовжньою віссю літального апарата.
3. Пристрій за п. 2, який відрізняється тим, що V-подібна аеродинамічна поверхня встановлена на осі обертання, перпендикулярній до поздовжньої осі літального апарата і кінематично зв'язана з регулятором газового потоку.
4. Пристрій за пп. 2, 3, який відрізняється тим, що вал-регулятор має розподільний канал, вісь якого при нульовому значенні просторового кута атаки співпадає з поздовжньою віссю повітрозабірника, форма та розміри вхідного отвору цього каналу узгоджені з формою та розмірами вихідного отвору повітрозабірника, форма та розміри вихідного отвору того ж каналу узгоджені з формою та розмірами вхідних отворів газохідних каналів.
5. Пристрій за п. 4, який відрізняється тим, що між вхідними отворами газохідних каналів знаходиться поверхня, форма та розміри якої узгоджені з вихідним отвором розподільного каналу вала-регулятора з можливістю його повного перекриття при нульовому значенні просторового кута атаки.
6. Пристрій за пп. 2, 5, який відрізняється тим, що носова частина виконана із двох частин, утворених її розрізом площиною, перпендикулярною до поздовжньої осі, так, що вона проходить через найближчі зони контакту вхідних отворів газохідних каналів і вала-регулятора з можливістю повороту цих частин одна відносно одної навколо поздовжньої осі та їх фіксації.
7. Пристрій за пп. 5, 6, який відрізняється тим, що газохідні канали розташовані симетрично відносно поздовжньої осі носової частини, а бокові сопла лежать у площині, що проходить через поздовжню вісь носової частини з можливістю фіксації їх відносно площини симетрії V-подібної аеродинамічної поверхні.
Текст
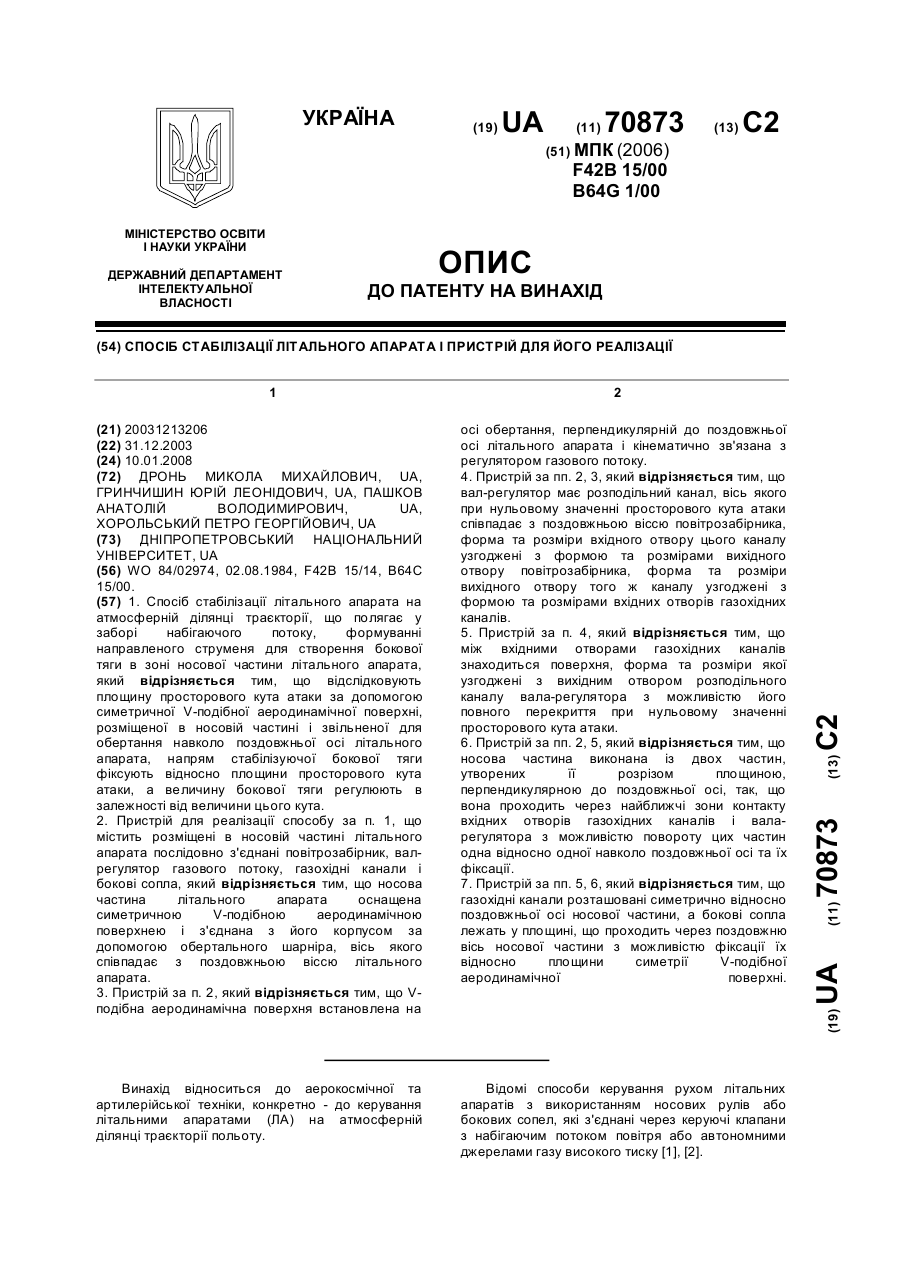
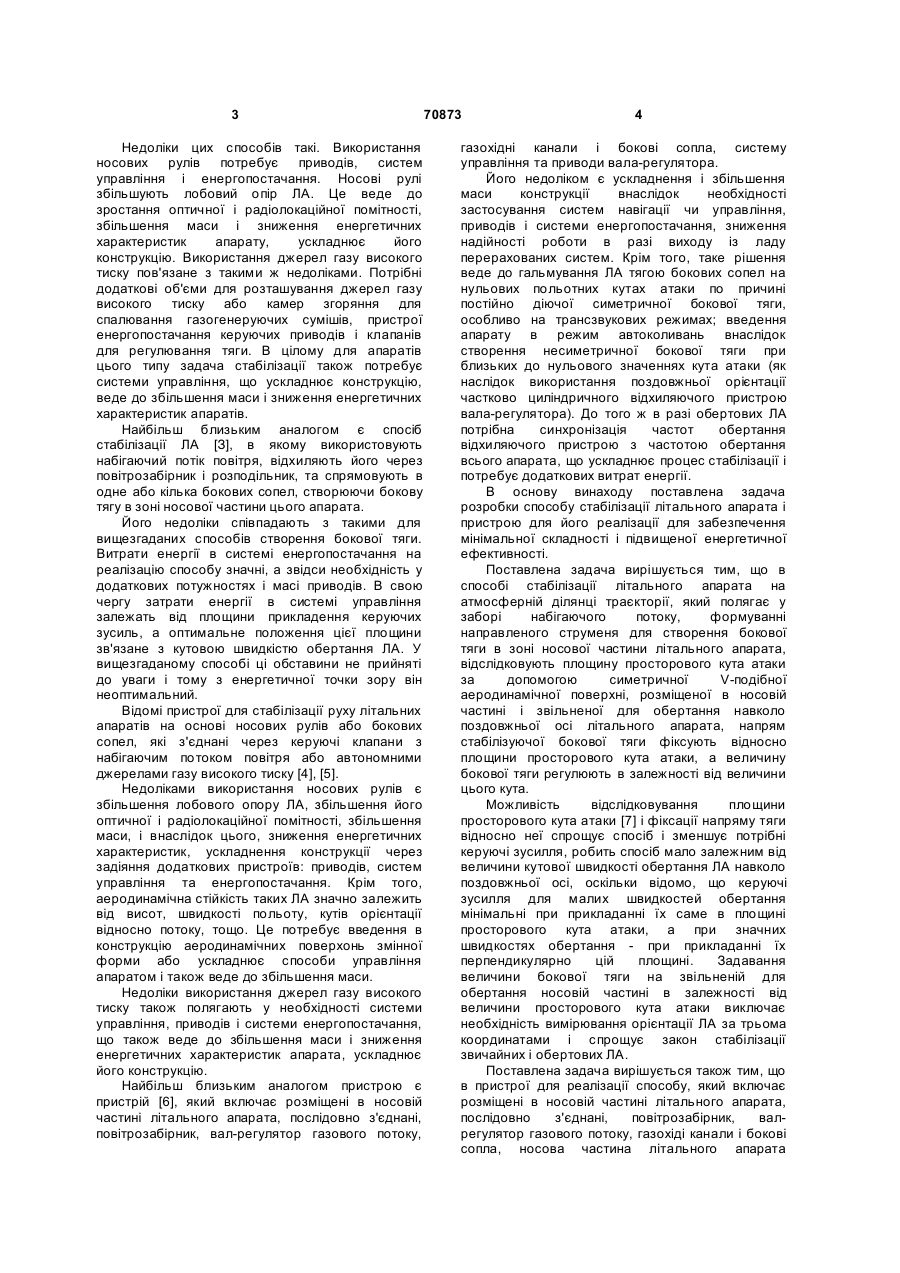
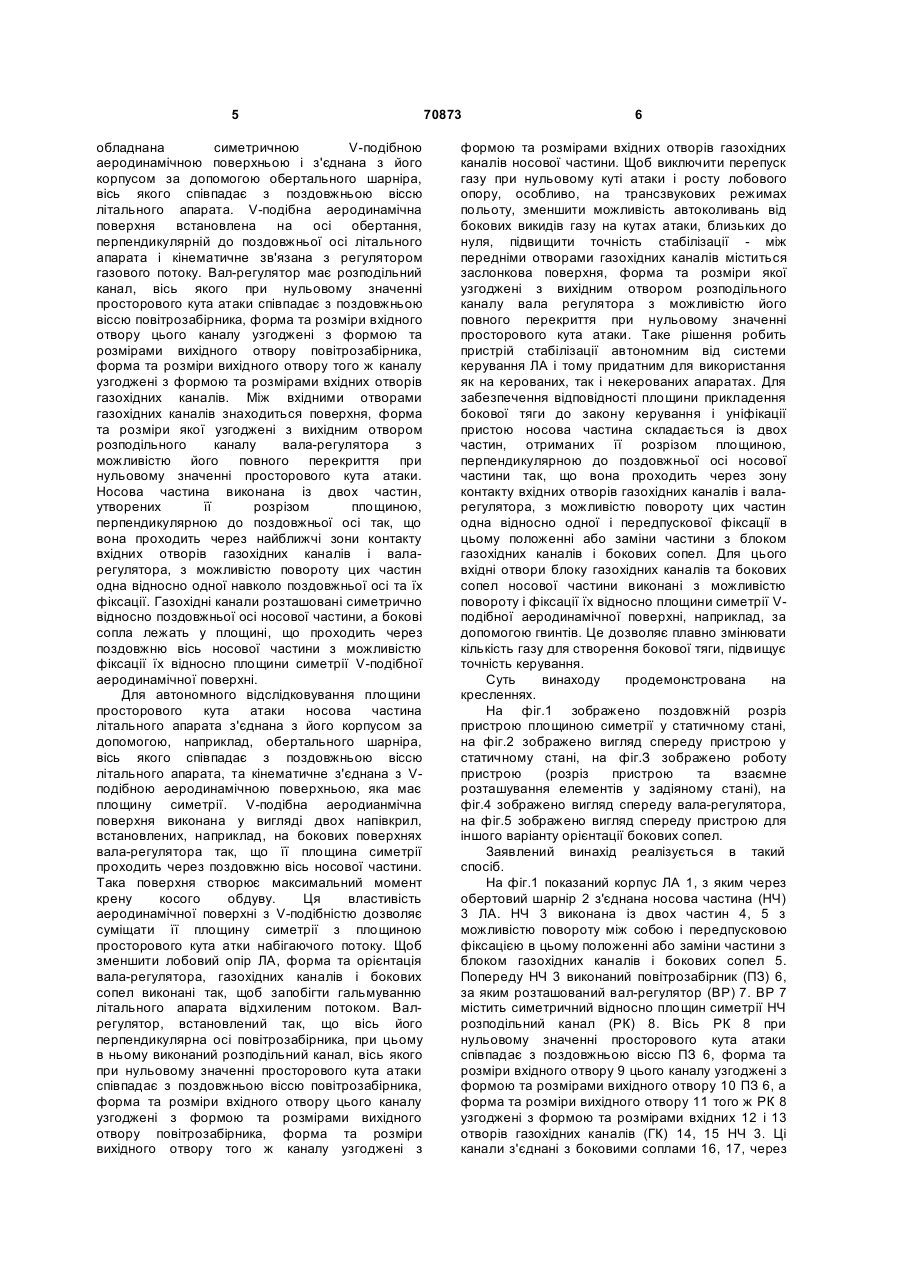
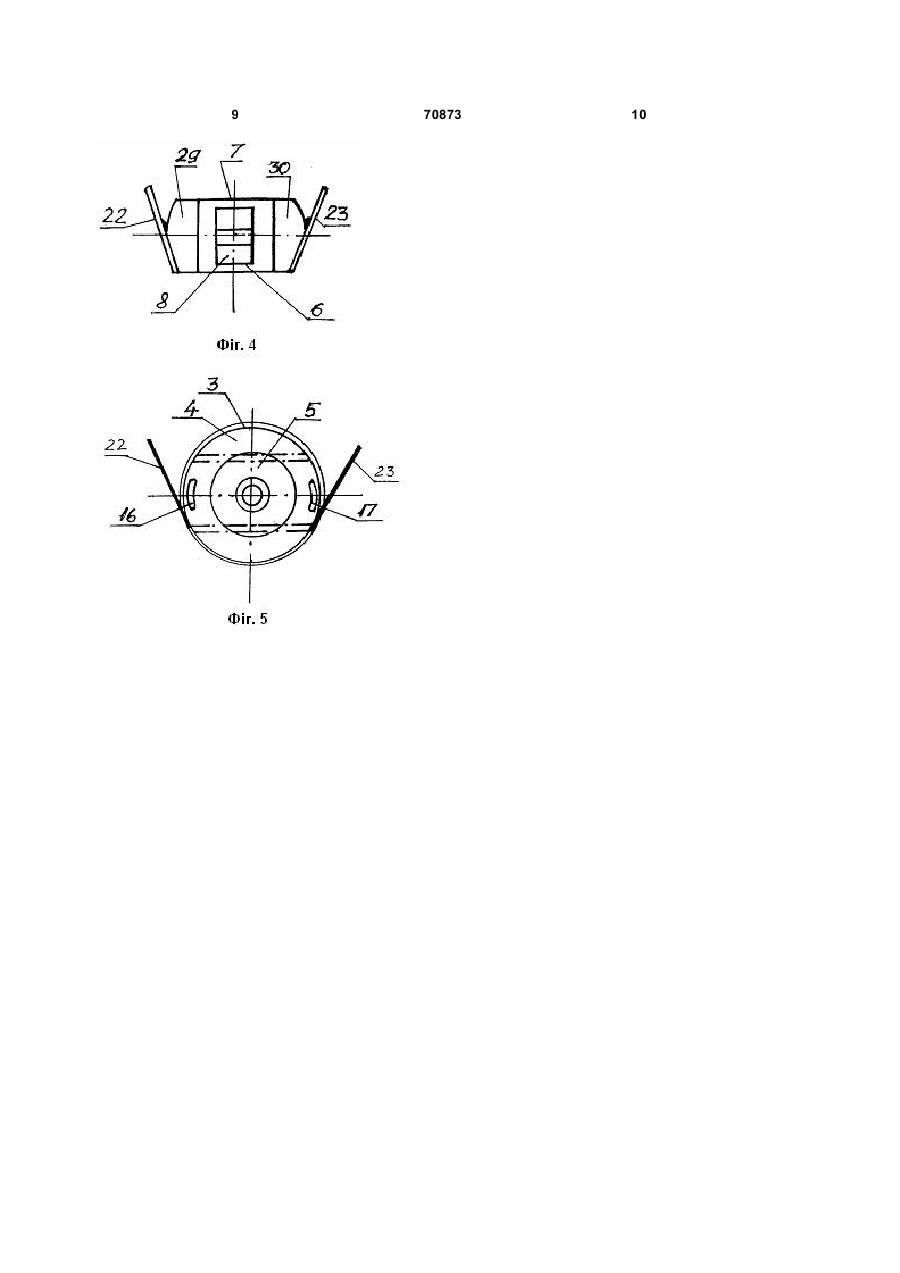
1. Спосіб стабілізації літального апарата на атмосферній ділянці траєкторії, що полягає у заборі набігаючого потоку, формуванні направленого струменя для створення бокової тяги в зоні носової частини літального апарата, який відрізняється тим, що відслідковують площину просторового кута атаки за допомогою симетричної V-подібної аеродинамічної поверхні, розміщеної в носовій частині і звільненої для обертання навколо поздовжньої осі літального апарата, напрям стабілізуючої бокової тяги фіксують відносно площини просторового кута атаки, а величину бокової тяги регулюють в залежності від величини цього кута. 2. Пристрій для реалізації способу за п. 1, що містить розміщені в носовій частині літального апарата послідовно з'єднані повітрозабірник, валрегулятор газового потоку, газохідні канали і бокові сопла, який відрізняється тим, що носова частина літального апарата оснащена симетричною V-подібною аеродинамічною поверхнею і з'єднана з його корпусом за допомогою обертального шарніра, вісь якого співпадає з поздовжньою віссю літального апарата. 3. Пристрій за п. 2, який відрізняється тим, що Vподібна аеродинамічна поверхня встановлена на C2 2 UA 1 3 Недоліки цих способів такі. Використання носових рулів потребує приводів, систем управління і енергопостачання. Носові рулі збільшують лобовий опір ЛА. Це веде до зростання оптичної і радіолокаційної помітності, збільшення маси і зниження енергетичних характеристик апарату, ускладнює його конструкцію. Використання джерел газу високого тиску пов'язане з такими ж недоліками. Потрібні додаткові об'єми для розташування джерел газу високого тиску або камер згоряння для спалювання газогенеруючих сумішів, пристрої енергопостачання керуючих приводів і клапанів для регулювання тяги. В цілому для апаратів цього типу задача стабілізації також потребує системи управління, що ускладнює конструкцію, веде до збільшення маси і зниження енергетичних характеристик апаратів. Найбільш близьким аналогом є спосіб стабілізації ЛА [З], в якому використовують набігаючий потік повітря, відхиляють його через повітрозабірник і розподільник, та спрямовують в одне або кілька бокових сопел, створюючи бокову тягу в зоні носової частини цього апарата. Його недоліки співпадають з такими для вищезгаданих способів створення бокової тяги. Витрати енергії в системі енергопостачання на реалізацію способу значні, а звідси необхідність у додаткових потужностях і масі приводів. В свою чергу затрати енергії в системі управління залежать від площини прикладення керуючих зусиль, а оптимальне положення цієї площини зв'язане з кутовою швидкістю обертання ЛА. У вищезгаданому способі ці обставини не прийняті до уваги і тому з енергетичної точки зору він неоптимальний. Відомі пристрої для стабілізації руху літальних апаратів на основі носових рулів або бокових сопел, які з'єднані через керуючі клапани з набігаючим потоком повітря або автономними джерелами газу високого тиску [4], [5]. Недоліками використання носових рулів є збільшення лобового опору ЛА, збільшення його оптичної і радіолокаційної помітності, збільшення маси, і внаслідок цього, зниження енергетичних характеристик, ускладнення конструкції через задіяння додаткових пристроїв: приводів, систем управління та енергопостачання. Крім того, аеродинамічна стійкість таких ЛА значно залежить від висот, швидкості польоту, кутів орієнтації відносно потоку, тощо. Це потребує введення в конструкцію аеродинамічних поверхонь змінної форми або ускладнює способи управління апаратом і також веде до збільшення маси. Недоліки використання джерел газу високого тиску також полягають у необхідності системи управління, приводів і системи енергопостачання, що також веде до збільшення маси і зниження енергетичних характеристик апарата, ускладнює його конструкцію. Найбільш близьким аналогом пристрою є пристрій [6], який включає розміщені в носовій частині літального апарата, послідовно з'єднані, повітрозабірник, вал-регулятор газового потоку, 70873 4 газохідні канали і бокові сопла, систему управління та приводи вала-регулятора. Його недоліком є ускладнення і збільшення маси конструкції внаслідок необхідності застосування систем навігації чи управління, приводів і системи енергопостачання, зниження надійності роботи в разі виходу із ладу перерахованих систем. Крім того, таке рішення веде до гальмування ЛА тягою бокових сопел на нульових польотних кутах атаки по причині постійно діючої симетричної бокової тяги, особливо на трансзвукових режимах; введення апарату в режим автоколивань внаслідок створення несиметричної бокової тяги при близьких до нульового значеннях кута атаки (як наслідок використання поздовжньої орієнтації частково циліндричного відхиляючого пристрою вала-регулятора). До того ж в разі обертових ЛА потрібна синхронізація частот обертання відхиляючого пристрою з частотою обертання всього апарата, що ускладнює процес стабілізації і потребує додаткових витрат енергії. В основу винаходу поставлена задача розробки способу стабілізації літального апарата і пристрою для його реалізації для забезпечення мінімальної складності і підвищеної енергетичної ефективності. Поставлена задача вирішується тим, що в способі стабілізації літального апарата на атмосферній ділянці траєкторії, який полягає у заборі набігаючого потоку, формуванні направленого струменя для створення бокової тяги в зоні носової частини літального апарата, відслідковують площину просторового кута атаки за допомогою симетричної V-подібної аеродинамічної поверхні, розміщеної в носовій частині і звільненої для обертання навколо поздовжньої осі літального апарата, напрям стабілізуючої бокової тяги фіксують відносно площини просторового кута атаки, а величину бокової тяги регулюють в залежності від величини цього кута. Можливість відслідковування площини просторового кута атаки [7] і фіксації напряму тяги відносно неї спрощує спосіб і зменшує потрібні керуючі зусилля, робить спосіб мало залежним від величини кутової швидкості обертання ЛА навколо поздовжньої осі, оскільки відомо, що керуючі зусилля для малих швидкостей обертання мінімальні при прикладанні їх саме в площині просторового кута атаки, а при значних швидкостях обертання - при прикладанні їх перпендикулярно цій площині. Задавання величини бокової тяги на звільненій для обертання носовій частині в залежності від величини просторового кута атаки виключає необхідність вимірювання орієнтації ЛА за трьома координатами і спрощує закон стабілізації звичайних і обертових ЛА. Поставлена задача вирішується також тим, що в пристрої для реалізації способу, який включає розміщені в носовій частині літального апарата, послідовно з'єднані, повітрозабірник, валрегулятор газового потоку, газохіді канали і бокові сопла, носова частина літального апарата 5 обладнана симетричною V-подібною аеродинамічною поверхньою і з'єднана з його корпусом за допомогою обертального шарніра, вісь якого співпадає з поздовжньою віссю літального апарата. V-подібна аеродинамічна поверхня встановлена на осі обертання, перпендикулярній до поздовжньої осі літального апарата і кінематичне зв'язана з регулятором газового потоку. Вал-регулятор має розподільний канал, вісь якого при нульовому значенні просторового кута атаки співпадає з поздовжньою віссю повітрозабірника, форма та розміри вхідного отвору цього каналу узгоджені з формою та розмірами вихідного отвору повітрозабірника, форма та розміри вихідного отвору того ж каналу узгоджені з формою та розмірами вхідних отворів газохідних каналів. Між вхідними отворами газохідних каналів знаходиться поверхня, форма та розміри якої узгоджені з вихідним отвором розподільного каналу вала-регулятора з можливістю його повного перекриття при нульовому значенні просторового кута атаки. Носова частина виконана із двох частин, утворених її розрізом площиною, перпендикулярною до поздовжньої осі так, що вона проходить через найближчі зони контакту вхідних отворів газохідних каналів і валарегулятора, з можливістю повороту цих частин одна відносно одної навколо поздовжньої осі та їх фіксації. Газохідні канали розташовані симетрично відносно поздовжньої осі носової частини, а бокові сопла лежать у площині, що проходить через поздовжню вісь носової частини з можливістю фіксації їх відносно площини симетрії V-подібної аеродинамічної поверхні. Для автономного відслідковування площини просторового кута атаки носова частина літального апарата з'єднана з його корпусом за допомогою, наприклад, обертального шарніра, вісь якого співпадає з поздовжньою віссю літального апарата, та кінематичне з'єднана з Vподібною аеродинамічною поверхньою, яка має площину симетрії. V-подібна аеродианмічна поверхня виконана у вигляді двох напівкрил, встановлених, наприклад, на бокових поверхнях вала-регулятора так, що її площина симетрії проходить через поздовжню вісь носової частини. Така поверхня створює максимальний момент крену косого обдуву. Ця властивість аеродинамічної поверхні з V-подібністю дозволяє суміщати її площину симетрії з площиною просторового кута атки набігаючого потоку. Щоб зменшити лобовий опір ЛА, форма та орієнтація вала-регулятора, газохідних каналів і бокових сопел виконані так, щоб запобігти гальмуванню літального апарата відхиленим потоком. Валрегулятор, встановлений так, що вісь його перпендикулярна осі повітрозабірника, при цьому в ньому виконаний розподільний канал, вісь якого при нульовому значенні просторового кута атаки співпадає з поздовжньою віссю повітрозабірника, форма та розміри вхідного отвору цього каналу узгоджені з формою та розмірами вихідного отвору повітрозабірника, форма та розміри вихідного отвору того ж каналу узгоджені з 70873 6 формою та розмірами вхідних отворів газохідних каналів носової частини. Щоб виключити перепуск газу при нульовому куті атаки і росту лобового опору, особливо, на трансзвукових режимах польоту, зменшити можливість автоколивань від бокових викидів газу на кутах атаки, близьких до нуля, підвищити точність стабілізації - між передніми отворами газохідних каналів міститься заслонкова поверхня, форма та розміри якої узгоджені з вихідним отвором розподільного каналу вала регулятора з можливістю його повного перекриття при нульовому значенні просторового кута атаки. Таке рішення робить пристрій стабілізації автономним від системи керування ЛА і тому придатним для використання як на керованих, так і некерованих апаратах. Для забезпечення відповідності площини прикладення бокової тяги до закону керування і уніфікації пристою носова частина складається із двох частин, отриманих її розрізом площиною, перпендикулярною до поздовжньої осі носової частини так, що вона проходить через зону контакту вхідних отворів газохідних каналів і валарегулятора, з можливістю повороту цих частин одна відносно одної і передпускової фіксації в цьому положенні або заміни частини з блоком газохідних каналів і бокових сопел. Для цього вхідні отвори блоку газохідних каналів та бокових сопел носової частини виконані з можливістю повороту і фіксації їх відносно площини симетрії Vподібної аеродинамічної поверхні, наприклад, за допомогою гвинтів. Це дозволяє плавно змінювати кількість газу для створення бокової тяги, підвищує точність керування. Суть винаходу продемонстрована на кресленнях. На фіг.1 зображено поздовжній розріз пристрою площиною симетрії у статичному стані, на фіг.2 зображено вигляд спереду пристрою у статичному стані, на фіг.З зображено роботу пристрою (розріз пристрою та взаємне розташування елементів у задіяному стані), на фіг.4 зображено вигляд спереду вала-регулятора, на фіг.5 зображено вигляд спереду пристрою для іншого варіанту орієнтації бокових сопел. Заявлений винахід реалізується в такий спосіб. На фіг.1 показаний корпус ЛА 1, з яким через обертовий шарнір 2 з'єднана носова частина (НЧ) 3 ЛА. НЧ 3 виконана із двох частин 4, 5 з можливістю повороту між собою і передпусковою фіксацією в цьому положенні або заміни частини з блоком газохідних каналів і бокових сопел 5. Попереду НЧ 3 виконаний повітрозабірник (ПЗ) 6, за яким розташований вал-регулятор (ВР) 7. ВР 7 містить симетричний відносно площин симетрії НЧ розподільний канал (РК) 8. Вісь РК 8 при нульовому значенні просторового кута атаки співпадає з поздовжньою віссю ПЗ 6, форма та розміри вхідного отвору 9 цього каналу узгоджені з формою та розмірами вихідного отвору 10 ПЗ 6, а форма та розміри вихідного отвору 11 того ж РК 8 узгоджені з формою та розмірами вхідних 12 і 13 отворів газохідних каналів (ГК) 14, 15 НЧ 3. Ці канали з'єднані з боковими соплами 16, 17, через 7 які при ненульовому куті атаки спрямовується відібраний ПЗ 6 набігаючий потік (НП) 18 і створює бокову тягу (як це показано на фіг.З). В статичному, а для ЛА - вихідному, стані, вихідний отвір 11 ВР 7 закритий заслонковою поверхнею 19. На фіг.2 показано, як на зовнішніх бокових поверхнях (ліва - 20, права - 21) ВР 7 встановлені напівкрила 22, 23 V-подібної аеродинамічної поверхні (V-АДП). Там же видно, що площина симетрії цієї поверхні співпадає з площиною симетрії РК 8 ВР 7. Якщо аеродинамічний кут крену (jп відмінний від нуля, як це показано на фіг.2, крила 22, 23 V-АДП розвертають НЧ 3 (завдяки ВР 2) площиною симетрії навколо поздовжньої осі в площину просторового кута атаки. В польоті при нульовому куті атаки набігаючий потік 18 через ПЗ 6 попадає в РК 8 ВР 7. Далі він не виходить, це не дозволяє поверхня 19. Якщо просторовий кут атаки a п відмінний від нуля, як це показано на фіг.З, крила 22, 23 V-АДП розвертають ВРнавколо поперечної осі до встановлення флюгерного положення, тобто на величину цього ж кута. ГК 14 в такому разі перекритий, а ГК 15 - відкритий для НП 18, який поступає крізь ПВ 6 і РК 8. Через бокове сопло 17 створюється бокова тяга вихідного потоку 24, яка протидіє збуренню, що викликало появу кута атаки a п. При цьому інтенсивність потоку через 17 залежить від ступені перекриття вхідного отвору 13 ГК 15 вихідним отвором 11 ВР 7, тобто від величини a п. На фіг.4 показаний варіант виконання ВР 7, з V-АДП який забезпечує відслідковування кута атаки в польоті. Відповідно до вищенаведеного, площина прикладення бокової тяги залежить від закону керування. Тому НЧ 3 виконана з двох частин 4, 5. Перед експлуатацією ЛА визначають орієнтацію цієї площини відносно площини симетрії V-АДП, відповідно розвертають між собою частини 4, 5 (або замінюють частину з блоком газохідних каналів і бокових сопел 5 на частину з відповідною орієнтацією отворів) і фіксують в такому стані, що показано на фіг.5, де орієнтація бокових сопел 16, 17 відрізняються від такої ж на фіг. 2 на 90°. Така орієнтація відповідає випадку обертових ЛА. Таким чином заявлені спосіб стабілізації літального апарату і пристрій для його реалізації забезпечують мінімальну складність і підвищення енергетичної ефективності. ДЖЕРЕЛА ІНФОРМАЦІЇ 1. Патент Великобританії 539224. 2. Патент США 3.139.725. 3. Патент США PCT/US83/00082. 4. Патент США 3.210.93 7. 5. Патент США 3.749.334. 6. Патент США PCT/US83/00086. 7. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. ГОСТ 20058-80. 70873 8 9 70873 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stabilization of aircraft and device for its realization
Автори англійськоюDron Mykola Mykhailovych, Hrynchyshyn Yurii Leonidovych, Pashkov Anatolii Volodymyrovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюСпособ стабилизации летательного аппарата и устройство для его реализации
Автори російськоюДронь Николай Михайлович, Гринчишин Юрий Леонидович, Пашков Анатолий Владимирович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: B64G 1/00, F42B 15/00
Мітки: апарата, стабілізації, реалізації, спосіб, літального, пристрій
Код посилання
<a href="https://ua.patents.su/5-70873-sposib-stabilizaci-litalnogo-aparata-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації літального апарата і пристрій для його реалізації</a>
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Амеліна Ірина Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, апарата, літального, стабілізації, кутової, пристрій
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Величко Надія Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, система, літального, апарата, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Паніна Алла Володимирівна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: система, стабілізації, літального, апарата, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Антошик Вікторія Миколаївна, Амелін Сергій Вікторович, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, літального, стабілізації, система, апарата
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Спосіб спасіння ступеня літального апарата на траєкторії спуску в атмосфері і пристрій для його здійснення
Номер патенту: 70266
Опубліковано: 15.09.2004
Автори: Пашков Анатолій Володимирович, Хорольський Петро Георгійович, Дронь Микола Михайлович, Гринчишин Юрій Леонідович
МПК: F42B 15/00, B64G 1/00
Мітки: апарата, спосіб, ступеня, атмосфери, здійснення, спуску, пристрій, літального, спасіння, траєкторії
Формула / Реферат:
1. Спосіб спасіння ступеня літального апарата на траєкторії спуску в атмосфері, що полягає у прикладенні гальмуючого імпульсу аеродинамічними пристроями, зв'язаними із літальним апаратом нежорсткими елементами, який відрізняється тим, що після попадання літального апарата в атмосферу нежорсткі елементи, наприклад троси, звільняють від проміжних зв'язків із його корпусом, корпус розділяють на попередньо зв'язані цими тросами секції, наприклад...
Попередній патент: Клапан кільцевий або дисковий
Наступний патент: Похідні полінітроарилтіотриазолів та спосіб їх одержання
Випадковий патент: Напій гірка настоянка "артеміда з перцем"