Гравітаційний двигун
Формула / Реферат
Гравітаційний двигун, який має робоче колесо, обід якого поділений на рівні частини спицями, з'єднаними з ободом та ступицею, який відрізняється тим, що робоче колесо складається з двох однакових коліс, встановлених на підшипниках з обох боків коліна, нерухомого збірно-розбірного колінчастого вала 4, закріпленого на станині двигуна із спільними для обох коліс вантажами 7, встановленими на поздовжніх підшипниках на спицях 9 з можливістю руху поздовж спиць, ободи коліс з'єднані між собою кронштейнами, на болтах посередині між спицями, на яких закріплено по центру робочого колеса зубчастий вінець 17 та встановлене на підшипниках всередині робочого колеса на валу 6 коліна колінчастого вала, винесеного горизонтально на піврадіуса від осі обертання робочого колеса в сторону його обертання і закріпленого на кронштейнах 5 на валах робочого колеса 4 без можливості провертання, допоміжне колесо без обода, на ступиці якого встановлені спиці з двох частин: нерухомої 8а - з двох стальних полос з поздовжніми ненаскрізними вирізами, закріпленої на ступиці допоміжного колеса, та рухомої 8б - куліси, камінь якої складається із болта, закріпленого в спиці, та вставлених з обох боків спиці і закріплених гайками ззовні втулках з можливістю руху і провертання у вирізах нерухомої спиці 8а таким чином, щоб загальна довжина спиць допоміжного колеса разом із вантажем і ступицею в крайніх положеннях куліси становила: максимальна - радіус, а мінімальна - піврадіуса робочого колеса від осі обертання допоміжного колеса, а другий кінець куліси закріплений шарнірно в кронштейнах вантажів 7 робочого колеса на втулці, встановленій на болт у кронштейни вантажів з можливістю провертання втулки навкруги болта, та, встановлений на підшипниках на станині двигуна вал відбору потужності 13, на якому встановлена на шпонці зубчаста шестірня 12, зістикована із зубчастим вінцем 17 робочого колеса, і махове колесо 15, на якому розміщені та закріплені на станині двигуна пристрої запуску і зупинки двигуна.
Текст
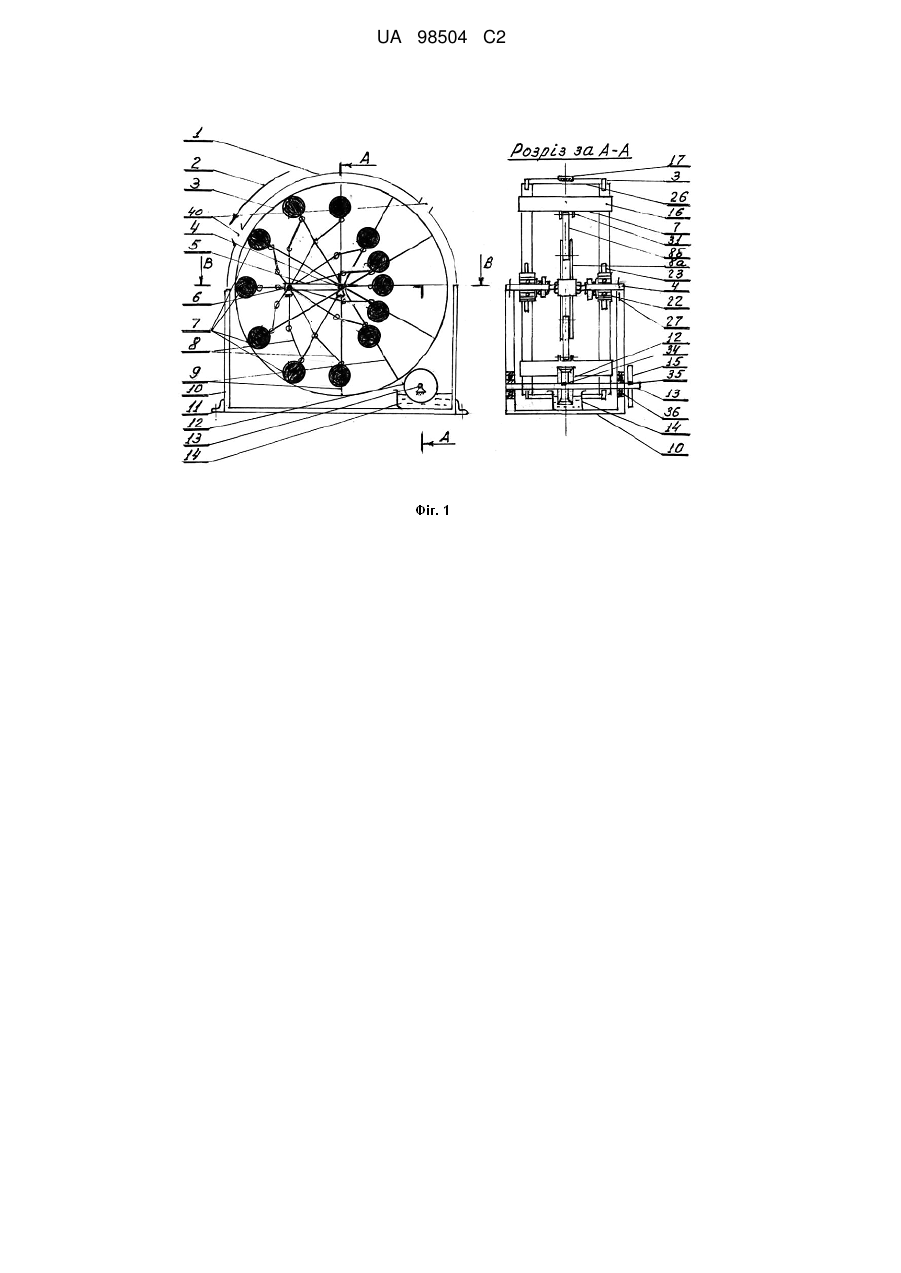
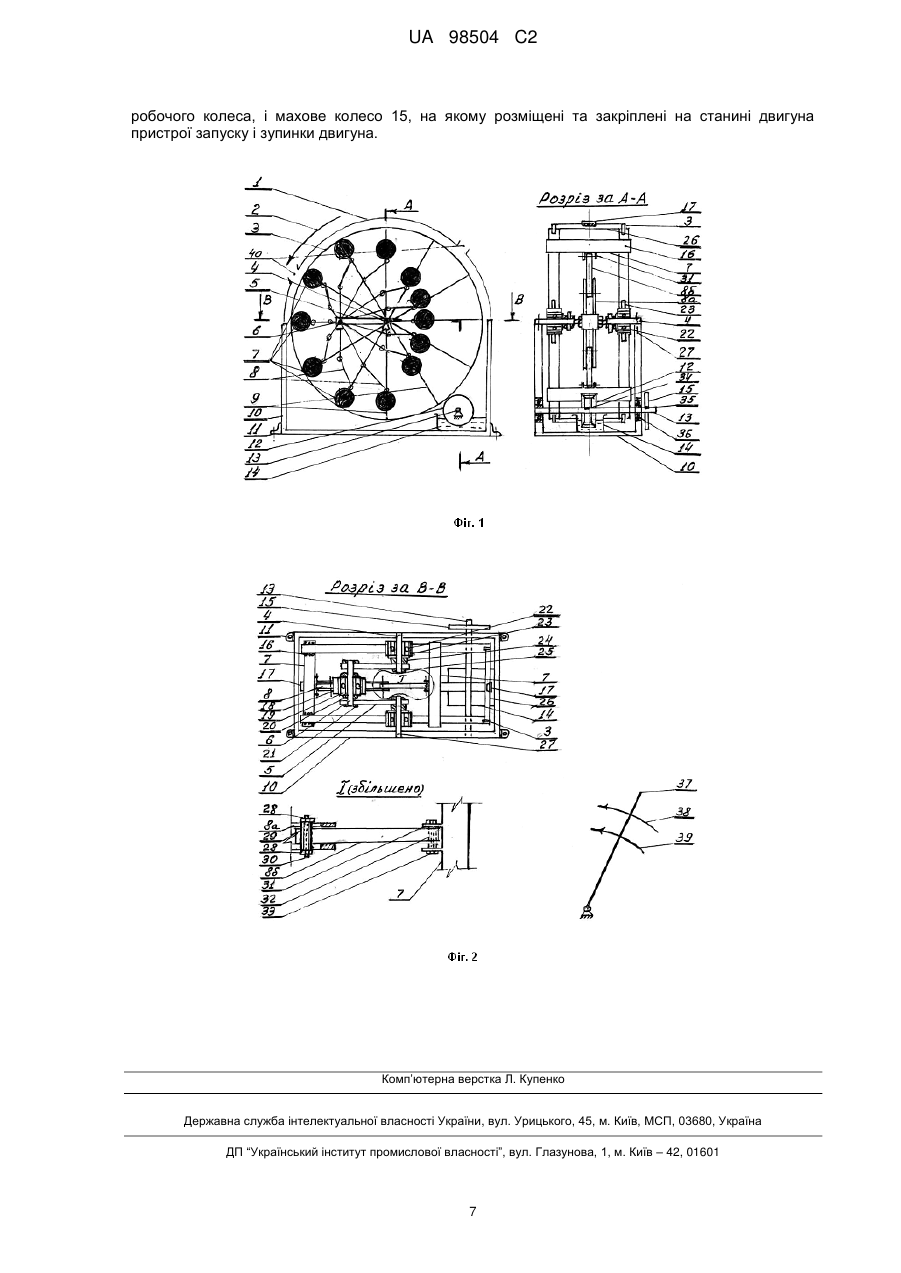
Реферат: Гравітаційний двигун має робоче колесо, обід якого поділений на рівні частини спицями, з'єднаними з ободом та ступицею. Робоче колесо складається з двох однакових коліс, встановлених на підшипниках з обох боків коліна, нерухомого збірно-розбірного колінчастого вала 4, закріпленого на станині двигуна із спільними для обох коліс вантажами 7, встановлених на поздовжніх підшипниках на спицях 9 з можливістю руху поздовж спиць, ободи коліс з'єднані між собою кронштейнами, на болтах посередині між спицями, на яких закріплено по центру робочого колеса зубчастий вінець 17 та встановлене на підшипниках всередині робочого колеса на валу 6 коліна колінчастого вала, винесеного горизонтально на піврадіуса від осі обертання робочого колеса в сторону його обертання і закріпленого на кронштейнах 5 на валах робочого колеса 4 без можливості провертання, допоміжне колесо без обода, на ступиці якого встановлені спиці з двох частин: нерухомої 8а - з двох стальних полос з поздовжніми ненаскрізними вирізами, закріпленими на ступиці допоміжного колеса, та рухомої 8б - куліси, камінь якої складається із болта, закріпленого в спиці та вставлених з обох боків спиці і закріплених гайками ззовні втулках з можливістю руху і провертання у вирізах нерухомої спиці 8а таким чином, щоб загальна довжина спиць допоміжного колеса разом із вантажем і ступицею в крайніх положеннях куліси становила: максимальна - радіус, а мінімальна піврадіуса робочого колеса від осі обертання допоміжного колеса. Другий кінець куліси закріплений шарнірно в кронштейнах вантажів 7 робочого колеса на втулці, встановленій на болт у кронштейни вантажів з можливістю провертання втулки навкруги болта та встановлений на підшипниках на станині двигуна вал відбору потужності 13, на якому встановлена на шпонці зубчаста шестірня 12, зістикована із зубчастим вінцем 17 робочого колеса, і махове колесо 15, на якому розміщені та закріплені на станині двигуна пристрої запуску і зупинки двигуна. UA 98504 C2 (12) UA 98504 C2 UA 98504 C2 5 10 15 20 25 30 35 40 45 50 55 Гравітаційний двигун - пристрій, що перетворює енергію тяжіння в механічну роботу і може знайти застосування у пристроях по виробленню електричної енергії та на транспорті. Відомо гравітаційний двигун - водяне колесо, яке має робоче колесо, обід якого поділений на рівні частини спицями з'єднаними з ободом та ступицею (Див., наприклад, А.Н. Боголюбов. Творение рук человеческих естественная история машин. М.: Знание, 1988 - С. 83, 98, 133-134). За технічною суттю та результатом, що досягається, пристрій є найбільш близьким до того, що заявляється. У пристрої прототипі енергія тяжіння води перетворюється в механічну роботу за рахунок крутного моменту відносно осі обертання внаслідок різниці в діючих силах у протилежних частинах робочого колеса при однакових плечах. Недоліком прототипу є його обов'язкове розташування на руслах річок, значні капітальні вкладення у будівництво гідротехнічних споруд, низька кутова швидкість, що унеможливлює його широке застосування. В основу винаходу поставлено задачу створити гравітаційний двигун, конструкція якого надасть можливість широко застосовувати його в промисловості і побуті, на транспорті та унеможливить шкідливий вплив на екологію, скласти достойну конкуренцію традиційним двигунам внутрішнього згорання, скоротити потреби в нафті і газу, як основних енергоносіях в даний час. Поставлена задача вирішується в гравітаційному двигуні, який має робоче колесо обід якого поділений на рівні частини спицями з'єднаними з ободом та ступицею, згідно з винаходом, робоче колесо складається з двох однакових коліс, встановлених на підшипниках з обох боків коліна нерухомого збірно-розбірного колінчастого вала 4, закріпленого на станині двигуна із спільними для обох коліс вантажами 7, встановленими на поздовжніх підшипниках на спицях 9 з можливістю руху поздовж спиць, ободи коліс з'єднані між собою кронштейнами на болтах посередині між спицями, на яких закріплено по центру робочого колеса зубчастий вінець 17 та встановлене на підшипниках всередині робочого колеса на валу 6 коліна колінчастого вала, винесеного горизонтально на піврадіуса від осі обертання робочого колеса в сторону його обертання і закріпленого на кронштейнах 5 на валах робочого колеса 4 без можливості провертання, допоміжне колесо без обода, на ступиці якого встановлені спиці з двох частин: нерухомої 8а - з двох стальних полос з поздовжніми ненаскрізними вирізами, закріпленими на ступиці допоміжного колеса, та рухомої 8б- куліси, камінь якої складається із болта, закріпленого в спиці та вставлених з обох боків спиці і закріплених гайками ззовні втулках з можливістю руху і провертання у вирізах нерухомої спиці 8а з таким розрахунком, щоб загальна довжина спиць допоміжного колеса разом із вантажем і ступицею в крайніх положеннях куліси становила: максимальна - радіус, а мінімальна - піврадіуса робочого колеса від осі обертання допоміжного колеса, а другий кінець куліси закріплений шарнірно в кронштейнах вантажів 7 робочого колеса на втулці встановленій на болт, вставлений у кронштейни вантажів з можливістю провертання втулки навкруги болта, та встановлений на підшипниках на станині двигуна вал відбору потужності 13, на якому встановлена на шпонці зубчаста шестірня 12 зістикована із зубчастим вінцем 17 робочого колеса, і махове колесо 15, на якому розміщені та закріплені на станині двигуна пристрої запуску і зупинки двигуна. Відмінними ознаками пристрою, що заявляється, є: - робоче колесо складається з двох однакових коліс, встановлених на підшипниках з обох боків коліна нерухомого збірно-розбірного колінчастого вала 4, закріпленого на станині двигуна із спільними для обох коліс вантажами 7, встановленими на поздовжніх підшипниках на спицях 9 з можливістю руху поздовж спиць, ободи коліс з'єднані між собою кронштейнами на болтах посередині між спицями, на яких закріплено по центру робочого колеса зубчатий вінець 17; - встановлене на підшипниках всередині робочого колеса на валу 6 коліна колінчастого вала, винесеного горизонтально на піврадіуса від осі обертання робочого колеса в сторону його обертання і закріпленого на кронштейнах 5 на валах робочого колеса 4 без можливості провертання, допоміжне колесо без обода, на ступиці якого встановлені спиці з двох частин: нерухомої 8а - з двох стальних полос з поздовжніми ненаскрізними вирізами, закріпленими на ступиці допоміжного колеса, та рухомої 8б - куліси, камінь якої складається із болта, закріпленого в спиці, та вставлених з обох боків спиці і закріплених гайками ззовні втулках з можливістю руху і провертання у вирізах нерухомої спиці 8а з таким розрахунком, щоб загальна довжина спиць допоміжного колеса разом із вантажем і ступицею в крайніх положеннях куліси становила максимальна - радіус, а мінімальна - піврадіуса робочого колеса від осі обертання допоміжного колеса, а другий кінець куліси закріплений шарнірно в кронштейнах вантажів 7 робочого колеса на втулці, встановленій на болт, вставлений у кронштейни вантажів з можливістю провертання втулки навкруги болта; 1 UA 98504 C2 5 10 15 20 25 30 35 40 45 50 55 - встановлений на підшипниках на станині двигуна вал відбору потужності 13, на якому встановлена на шпонці зубчаста шестірня 12, зістикована із зубчастим вінцем 17 робочого колеса, і махове колесо 15, на якому розміщені та закріплені на станині двигуна пристрої запуску і зупинки двигуна. Виходячи з описаного рівня техніки випливає, що вказані відміни пристрою, що заявляється, є новими. Завдяки встановленню всередині робочого колеса на коліні колінчастого вала допоміжного колеса із спицями з двох частин, одна з яких є кулісою, що з'єднана шарнірно з вантажем робочого колеса та має можливість рухатися і провертатися в ненаскрізних вирізах другої нерухомої спиці, закріпленій на ступиці допоміжного колеса з таким розрахунком, щоб максимальна довжина куліси і нерухомої спиці разом із вантажем і ступицею становила радіус, а мінімальна - піврадіуса робочого колеса від осі обертання допоміжного колеса, створюється різниця в плечах відносно осі обертання у протилежних частинах робочого колеса сил тяжіння вантажів, встановлених на поздовжніх підшипниках на його спиці, що забезпечує вантажам безперешкодний рух поздовж спиць, завдяки чому при умові надання зовнішнім джерелом енергії робочому і допоміжному колесам початкової кутової швидкості обертання, достатньої для того, щоб вантажі, рухаючись поздовж спиць робочого колеса внаслідок дії відцентрової сили інерції, зайняли крайнє положення на ободі робочого колеса в одній його частині, а в протилежній частині, внаслідок утримання вантажів спицями допоміжного колеса, на відстані піврадіуса від осі обертання робочого колеса, створюється крутний момент відносно осі обертання робочого колеса, який передається через зубчасту передачу на вал відбору потужності двигуна. У пристрої, що заявляється, шляхом під'єднання вала відбору потужності до редуктора або мультиплікатора, виконанням багатоступеневої конструкції з необхідною кількістю робочих коліс для одержання крутного моменту, встановленого завданням на проектування, забезпечується необхідна кутова швидкість та потужність, що забезпечує його широке застосування у промисловості та побуті, на транспорті, здійснюється гравітаційний двигун незалежний від традиційних енергоносіїв, конкурентноздатний відносно до двигунів внутрішнього згорання. На Фіг. 1 подано схему пристрою, що заявляється, розрізи за А-А та В-В, у збільшеному вигляді конструкцію куліси допоміжного колеса, на Фіг. 2 динамічна модель двигуна у вигляді ланки приведення. Гравітаційний двигун, що заявляється, має робоче колесо з двох однакових коліс, які мають обід 3, по дванадцять спиць 9, ступиці 23 встановлені на підшипниках 22, які встановлені з натягом на вали 4 колінчастого збірно-розбірного колінчастого нерухомого вала, розташовані по обидва боки коліна вала з тим, щоб на валу 6, винесеного на кронштейнах 5 в бік обертання робочого колеса на відстань піврадіуса від осі обертання робочого колеса, встановлюється на підшипнику 19 допоміжне колесо, яке має ступицю 18, дванадцять спиць 8 поділені на частини, одна з яких 8а нерухома закріплена на ступиці 18, а інша - рухома 8б - куліса шарнірно з'єднана з вантажем 7 робочого колеса за допомогою втулки 32, вставленій у спицю 8б та болта 33, вставленого у втулку 32, та нерухомою спицею 8а кронштейна вантажу 31 і закріпленого гайкою та втулками 29, встановленими з обох боків куліси 8б в ненаскрізні вирізи нерухомої спиці 8а на болт 30 і закріпленими гайкою 28. Підшипники 23 робочого колеса і 19 допоміжного колеса встановлюються на вали 4 і 6 з натягом з постановкою сальників і шайб та затягуються гайками 24 і 20. Кронштейни 5 встановлюються на вал 4 робочого колеса на виконані горизонтально фаски, що унеможливлює їх провертання, і закріплюються гайками 25. Вал 6 допоміжного колеса в кронштейнах 5 закріплюється гайками 21. На спиці 9 робочого колеса на поздовжніх підшипниках 16, які шплінтуються у вантажах, встановлюються вантажі 7, спільні для обох коліс робочого колеса. Посередині між спицями 9 робочого колеса встановлюються на болтах до ободів 3 робочого колеса з можливістю регулювання кронштейни 26, на яких закріплений зубчастий вінець 17. Колінчастий вал закріплюється на станині двигуна 10 болтами 27. На станині двигуна 10 на підшипниках 36 встановлений вал відбору потужності 13, на якому на шпонках 34 і 35 встановлена зубчаста ведена шестірня 12 та махове колесо 15. Шестірня 12 знаходиться у зчепленні із зубчастим вінцем (ведуча шестірня) 17 та обертається в оливі, для якої на станині 10 закріплена ємність 14. Станина двигуна 10 закріплюється до основи за допомогою кронштейнів 11. Зверху двигун закривається кожухом 1, який має жалюзі 40 для забору і відведення повітря при роботі двигуна. Стрілка 2 показує напрям обертання робочого колеса двигуна. 2 UA 98504 C2 5 10 15 20 25 30 35 40 45 50 55 60 Динамічна модель двигуна у вигляді ланки приведення на Фіг. 2 показує приведений момент інерції 37, приведений момент сил 38 та напрямок обертання 39. Гравітаційний двигун, що заявляється, виконується у вигляді робочого колеса, що складається з двох однакових коліс, поділених спицями 9 на дванадцять рівних частин, які з'єднуються з ободами 3 на болтах і ступицями 23 зварюванням. Ступиці 23 посаджені на підшипники 22 з натягом, які встановлені на вал 6, заповнюються консистентним мастилом, встановлюються сальники, шайби і затягуються з необхідним натягом гайками, які шплінтуються. На спицях 9, розміщених одна навпроти одної до закріплення ободів 3 встановлюються на поздовжніх підшипниках 16 вантажі 7, спільні для обох коліс, після чого підшипники 16 шплінтуються. Спиці робочого колеса 9 виготовляються із стальних труб, ободи 3 із стальних полос, вантажі 7 із чавуну з отворами для встановлення поздовжніх підшипників 16. Розміри перерізу спиць, товщина і довжина зварювальних швів на ступицях та болтового з'єднання з ободом визначаються розрахунком на міцність при граничній кутовій швидкості робочого колеса двигуна. На знятті горизонтально фаски вала 4 після встановлення робочого колеса встановлюють кронштейни 5 із стальної полоси з прямокутними вирізами на валу 4, що запобігають їх провертанню і затягують гайками 25. Зібране на стенді допоміжне колесо, яке має підшипник 19, ступицю 18, нерухомі спиці 8а, встановлюють всередині робочого колеса між кронштейнами 5, після чого встановлюють в отвори кронштейнів та внутрішню обойму підшипника 19 з натягом вал 6. З одного боку підшипника встановлюють сальник, шайбу і гайку 20, заповнюють підшипник консистентним мастилом і встановлюють сальник, шайбу і гайку 20 з другого боку. Затягуванням гайок 20 забезпечують необхідний натяг зовнішньої обойми підшипника 19 у втулці ступиці 18. Вал 6 закріплюють гайками 21 в кронштейнах 5. Далі встановлюють рухомі спиці 8б, вставляючи у ненаскрізні вирізи спиці 8а з обох боків спиці 8б втулки 29, заповнюють їх консистентним мастилом, після чого вставляють у втулки 29 і отвір спиці 8б болт із шайбою на головці і шайбу та гайку, яку затягують, з іншого боку спиці 8а. Далі вставляють у отвір спиці 8б з боку вантажу 7 втулку 32, заповнюють її мастилом, після чого в отвори кронштейнів 31 вантажів 7 та втулку 32 встановлюють болт 33, який затягується гайкою 28. Спиці 8а закріплюються на ступиці 18 зварюванням, виготовляються із двох стальних полос, встановлених паралельно з відстанню між ними, що дорівнює перерізу спиць 8б, виготовлених із труб з необхідною щілиною для вільного руху спиць 8б поздовж спиць 8а та їх провертання. Втулки 29 і 32 виготовляються із труб. Далі встановлюють кронштейни 26 із закріпленим на них зубчастим вінцем 17 на ободи 3 посередині між спицями 9 і закріплюють їх болтами з гайками у вирізах ободів 3 з можливістю регулювання для забезпечення належного зчеплення із веденою зубчастою шестірнею 12, яка встановлюється на шпонці 34, на вал відбору потужності 13 встановлений на підшипниках 36 на станині двигуна 10. Для змащення ведучої і веденої шестерень на станині встановлюється ємність 14, яка заповнюється гіпоїдною оливою. Змащення ведучої шестірні 17 здійснюється розбризкуванням оливи при обертанні веденої шестірні 12 в ємності з оливою. На консолі вала відбору потужності 13, яка виходить за межі станини двигуна 10, на шпонці 35 встановлюється махове колесо 15, на якому встановлюються та закріплюються на станині двигуна пристрої для запуску і зупинки двигуна. Збірно-розбірний колінчастий вал закріплюється на станині двигуна болтами 27, зверху двигун закривається стальним кожухом, який має жалюзі 40 для забору і відведення повітря для охолодження підшипників при роботі двигуна. Підшипники 16, 19, 22, 36 підбираються відповідно до стандартів в залежності від навантажень. При значних кутових швидкостях доцільно використовувати масляні підшипники, що застосовуються у двигунах внутрішнього згорання. При цьому колінчастий вал виготовляється суцільним із каналами і насосом подачі мастила, а втулки ступиць робочого і допоміжного коліс виготовляються збірно-розбірними та закріплюються на валу болтами з гайками після встановлення прокладок. В статичному стані пристрій, що заявляється, перебуває при загальмованому маховому колесі 15 гальмівним пристроєм для зупинки двигуна. При цьому робоче і допоміжне колеса, вал відбору потужності є нерухомими, п'ять вантажів 7 у верхньому секторі робочого колеса лежать на ступиці 23, сім вантажів 7 у нижньому секторі робочого колеса знаходяться на тих же місцях, що були при обертанні колеса. Тобто, двигун без загальмовування буде неврівноваженим. Гравітаційний двигун працює таким чином. Махове колесо 15 пристрою, що знаходиться в статичному стані розгальмовується. Після цього робочому колесу через вал відбору потужності 13, ведену 12 і ведучу 17 шестерні за рахунок зовнішнього джерела енергії через пусковий 3 UA 98504 C2 5 10 15 20 25 30 35 40 45 50 55 60 пристрій, встановлений на маховому колесі 15 надається початкова кутова швидкість обертання, необхідна для того, щоб вантажі 7 під дією відцентрової сили інерції рухаючись поздовж спиць 9 зайняли крайнє положення в лівій частині робочого колеса на ободі 3, при цьому довжина спиць 8а і 8б допоміжного колеса є мінімальною, та на спицях 9 у правій частині робочого колеса на відстані, яка дозволена при максимальній довжині спиць 8а і 8б допоміжного колеса, внаслідок чого досягається різниця плечей вантажів відносно осі обертання робочого колеса в піврадіуса та радіуса в протилежних частинах робочого колеса. Початкову кутову швидкість обертання робочого колеса знаходимо з того, що відцентрова сила інерції повинна бути більша ваги вантажу 7 з коефіцієнтом 1,1, що враховує опір сил тертя куліси 8б. В пристрої найменше значення відцентрової сили інерції буде при знаходженні вантажів 7 на ступиці 23 на відстані третини довжини радіуса від осі обертання робочого колеса. Отже: 2 1 3,3g 1,1Fц≥mω 0 /3R>1.1mg; звідси: ω0≥√ /R, де: Fц - відцентрова сила інерції вантажів 7; m - маса вантажу 7; ω0 - початкова кутова швидкість робочого колеса; g - прискорення вільного падіння; R - радіус робочого колеса двигуна; Після надання робочому колесу необхідної кутової швидкості відключаємо пусковий пристрій на маховому колесі 15. Двигун працює під дією крутного моменту, створеного силами тяжіння вантажів 7 та різниці в плечах створеної допоміжним колесом за рахунок куліси 8б. У лівій частині робочого колеса плече по осі абсцис дорівнює радіусу, а в правій - піврадіусу, при розміщенні початку осей координат на осі обертання робочого колеса. Реакції підшипників робочого колеса 22 та допоміжного колеса 19, рушійний момент вантажів 7 відносно осі обертання робочого колеса знаходимо підрахунком. Реакції підшипника робочого колеса 22. ∑Х=Х22-Fц - 2FцCos30° - 2FцCos60°=Х22-Fц(1+2Cos30+2Cos60°); 2 Х22=3,73mω R; де: Х22 - реакція підшипника 22 по осі абсцис; Fц - відцентрова сила інерції вантажів 7; m - маса одного вантажу 7; ω - кутова швидкість робочого колеса двигуна; R - радіус робочого колеса; ∑Y=Y22-Q - 10Р=0; Звідси: Y22=Q+10P; де: Y22 - реакція підшипника 22 по осі ординат; Q - власна вага робочого колеса; Р - вага одного вантажу 7; Вага вантажів 7 у верхній і нижній точках по осі ординат не передається на підшипник 22, позаяк вони рухаються по спицях 9 безперешкодно. З цієї ж причини не передаються по осі абсцис на підшипник 22 робочого колеса відцентрові сили вантажів 7 у правій частині робочого колеса, позаяк вони через кулісу і нерухому спицю допоміжного колеса передаються на підшипник 19. Реакції від відцентрової сили на підшипники 19 і 22 по осі ординат взаємно врівноважуються. Реакції підшипника допоміжного колеса 19. 0 ∑Х=-X19+Fц+2FцCos15°+2FцCos30 +2FцCos60°=0; 2 X19=Fц (1+2Cos15+2Cos30+2Cos60)=5,664mRω ; де: X19- реакція підшипника допоміжного колеса 19 по осі абсцис; Fц - відцентрова сила інерції вантажів 7; m - маса одного вантажу 7; ω - кутова швидкість робочого колеса; R - радіус робочого колеса; Рушійний момент сил робочого колеса. Mp=PR+2PRCos30+2PRCos60-0,5PR-2PR(Cos15-0,5)-2PR(Cos30-0,5)=3,732PR2,164PR=1,568PR; де: Мр - рушійний момент сил робочого колеса; Р - вага одного вантажу 7; R - радіус робочого колеса; Опір рухові робочого колеса у пристрої, що заявляється, здійснюється силою опору повітря при обертанні вантажів 7 та силою тертя в підшипниках. При коефіцієнтові корисної дії підшипників кочення, що становить 0,97, та враховуючи складні умови їх роботи із-за наявності горизонтальної і вертикальної складових реакцій, беремо коефіцієнт 0,95 на який зменшуємо рушійний момент, враховуючи сили опору тертя в підшипниках. Отже: М р = 0,95*l, 568PR=l, 48PR; Сили опору повітря визначаємо за формулою: 1 2 Fоп.= /2cxρSv ; де: Fоп. - сила опору повітря; сх - безрозмірний коефіцієнт опору повітря залежний від форми вантажів; ρ - щільність повітря, при температурі 15 градусів Цельсія і 1 кг атмосферному тиску 760 мм. ртутного стовпа, дорівнює /89,81 /м3; S - площа проекції вантажів на площину, перпендикулярну направленню руху (площа міделя); v - швидкість руху вантажів; 4 UA 98504 C2 5 10 15 20 25 30 Враховуючи, що v=ωR, та приймаючи за одиницю коефіцієнт опору вантажів 2 2 2 2 2 cxFоп.=0,5*0,125*9,81SR ω =0,574SR ω ; Звідси момент опору дорівнює: Моп.=0,574SR 2 3 2 ω (5R+2Sin60R+5*0,5R)=5,3SR ω ; де: Моп. - момент сил опору повітря; S - площа проекції вантажів на площину, перпендикулярну направленню руху (площа міделя); R - радіус вантажів від осі обертання робочого колеса; ω - кутова швидкість обертання робочого колеса; 3 2 Позначивши величину 5,3SR =μ, одержимо: Моп.=μω . Таким чином приведений момент сил 2 двигуна дорівнює: Mпр.=Mp - Моп.=l, 48PR - μω ; Момент інерції ланки приведення знаходимо з того, що сума кінетичних енергій всіх ланок механізму дорівнює кінетичній енергії ланки приведення. 2 Іпр.=Ірк.+Ідк.+(ωвш./ω) (Івш.+Імах.+Івал.); де: Іпр. - момент інерції ланки приведення; Ірк. – момент інерції робочого колеса; Ідк. - момент інерції допоміжного колеса; ωвш. - кутова швидкість веденої шестірні; ω - кутова швидкість ланки приведення, що дорівнює кутовій швидкості робочого та допоміжного коліс; Івш. - момент інерції веденої шестірні; Імах. - момент інерції маховика; Івал. момент інерції вала відбору потужності; Враховуючи, що відношення кутових швидкостей дорівнює зворотному відношенню радіусів 2 або чисел зубів шестерень: Іпр. = Ірк.+Ідк.+(Івш.+Імах.+Івал.)(Zрк./Zвш.), де: Zрк. - число зубів ведучої шестірні робочого колеса; Zвш. - число зубів веденої шестірні; щодо сил опору при рухові вантажів 7 по спицях 9 робочого колеса під впливом куліси 8б, то загальна сума робіт при їх рухові дорівнює нулю, отже ці внутрішні сили не впливають на роботу двигуна. Так, у четвертій чверті координатної сітки, при розміщенні її центру на осі обертання робочого колеса, вантажі 7 внаслідок сили впливу куліси рухаються поздовж спиць, переборюючи сили інерції, тобто виконується негативна робота. В той же час, у першій чверті координатної сітки, вантажі 7, повертаються в попереднє положення під впливом сил інерції, тобто виконується позитивна робота, а сума цих робіт дорівнює нулю. Рівняння обертального руху двигуна відповідно з принципом Даламбера знаходимо з того, що сума моментів відносно осі обертання активних сил і сил інерції дорівнює нулю. ∑М=0; dω 2 dω Звідси: Іпр. /dt=Mp-μω ; де: Іпр. - момент інерції ланки приведення; /dt - кутове прискорення ланки приведення; Мр. - рушійний момент сил ланки приведення; μ - коефіцієнт опору повітря; ω - кутова швидкість ланки приведення; розділюючи змінні та позначивши відношення (μ/Іпр.=n, беремо від обох частин рівності відповідні визначені інтеграли Мр-μω2 35 40 45 55 Мр -nt -nt 0 Mp.d / Mp. 2 n dt ; t 0 Звідси: ln /Мр.=-nt, або: ln /Мр.=ℓ ; Звідси: ω=√ /μ1-ℓ ), де: ω - кутова швидкість ланки приведення; Мр. - рушійний момент сил; μ - коефіцієнт опору повітря; n - відношення коефіцієнта опору повітря до моменту інерції ланки приведення; t - час в секундах; Mp Кутова швидкість з часом зростає, наближаючись до граничного значення ω гр = √ /μ, де: ωгр - гранична кутова швидкість ланки приведення; Мр - рушійний момент сил; μ - коефіцієнт опору повітря; При цьому початкова кутова швидкість, яка надається двигуну зовнішньою силою, є складовою кутової швидкості ланки приведення тому, що вона не буде зберігатися на заданому рівні без дії рушійного моменту двигуна. Суть значення граничної кутової швидкості полягає в тому, що двигун внаслідок прискорення, викликаного дією рушійного моменту після запуску двигуна, за певний час набуває граничної кутової швидкості внаслідок рівності значень рушійного і опорного моментів. При цьому приведений момент сил буде дорівнювати нулю, тобто двигун працюватиме в режимі холостого ходу. При прикладенні корисного навантаження кутова швидкість зменшиться до необхідної, значення рушійного моменту зросте і двигун буде виконувати корисну роботу. Рівняння руху двигуна в енергетичній формі: Iпр. 2 / 2 Iпр. 0 2 / 2 50 Мр-μω2 0 Mпр. d Де: Іпр. - момент інерції ланки приведення; ω - кутова швидкість ланки приведення; ω0 - початкова кутова швидкість ланки приведення; М пр. - момент сил ланки приведення, який дорівнює сумі моментів рушійного і опору; У зв'язку з неспівпаданням законів зміни приведених моментів сил рушійних і сил опору в режимі руху, що встановився (робочий режим), відбувається коливання кутової швидкості у бік збільшення та зменшення відносно середнього її значення. З метою зменшення частоти коливань на валу відбору потужності встановлюється махове колесо 15 (маховик), який розраховується по методу Мерцалова. Координати центра тяжіння (центра мас) робочого колеса двигуна будуть: 1,759PR Хс = /Q+12P. Yc=0, де: Хс - координата центра тяжіння робочого колеса двигуна по осі абсцис; Р - вага одного вантажу 7; R - радіус робочого колеса двигуна; 5 UA 98504 C2 5 10 15 20 25 30 35 Q - власна вага робочого колеса; Yc - координата центра тяжіння робочого колеса двигуна по осі ординат; Координати центра тяжіння (центра мас) робочого колеса двигуна, як і в пристрої прототипі, зміщені в бік обертання робочого колеса по осі абсцис та залишаються нерухомими в будьякому положенні вантажів 7 при роботі двигуна, тому потенційна енергія системи дорівнює нулю і двигун є динамічно врівноваженим. У пристрої потенційна енергія тяжіння відносно до вантажів 7 є активною зовнішньою силою, що створює крутний момент за рахунок різниці в плечах вантажів відносно осі обертання. Закон збереження механічної енергії у пристрої виконується. Так, в робочому режимі у двигуні підтримується середнє значення кутової швидкості, що, при незмінному значенні початкової кутової швидкості, означає постійне значення кінетичної енергії. Отже, при нульовому значенні потенційної енергії системи, повна механічна енергія системи є величиною незмінною. Незначні коливання кутової швидкості пояснюються наявністю сил опору повітря та сил тертя в підшипниках при рухові двигуна (сили непотенційні), що допускається цим законом. Конструювання двигуна проводиться відповідно до завдання, яким визначається необхідна потужність (N) та кутова швидкість (ω). Враховуючи, що потужність N=Мпр.ω, то необхідний Мпр=N/ω; де: Мпр - момент сил ланки приведення; N - потужність двигуна у ватах; ω - кутова швидкість двигуна; При цьому враховуємо, що кутова швидкість повинна бути більшою початкової та меншою граничної. Оптимальне її значення складає в межах 0,67-0,85 граничної кутової швидкості. Далі по встановленому значенню кутової швидкості вираховуємо момент сил опору, після чого необхідний рушійниймомент, який забезпечить встановлену завданням на конструювання потужність двигуна. Необхідний рушійний момент досягається виконанням багатоступеневої конструкції двигуна. При цьому з метою усунення впливу на станину двигуна горизонтальних реакцій підшипників 22, слід встановлювати на колінчастому валу робочі колеса попарно з обертанням в різні боки із встановленням по обидва боки робочих коліс двох валів відбору потужності. Коефіцієнт корисної дії двигуна вираховується як різниця від одиниці відношення робіт сил негативного до μω3 сил корисного опору, що в кінцевому рахунку є: К.К.Д.=1- /N; де: К.К.Д. - коефіцієнт корисної дії; μ - коефіцієнт опору повітря; ω - кутова швидкість двигуна; N - потужність двигуна у ватах; Техніко-економічні переваги пристрою, що заявляється, у порівнянні з пристроєм прототипом, полягають в можливості застосування в будь-якій точці земної поверхні без необхідності капітальних затрат на будівництво гідроспоруд, одержання необхідної потужності при менших габаритах за рахунок виконання багатоступеневої конструкції та збільшення кутової швидкості, незалежності від традиційних на сьогодні енергоносіїв, відсутності шкідливого впливу на екологію. ФОРМУЛА ВИНАХОДУ 40 45 50 55 Гравітаційний двигун, який має робоче колесо, обід якого поділений на рівні частини спицями, з'єднаними з ободом та ступицею, який відрізняється тим, що робоче колесо складається з двох однакових коліс, встановлених на підшипниках з обох боків коліна, нерухомого збірнорозбірного колінчастого вала 4, закріпленого на станині двигуна із спільними для обох коліс вантажами 7, встановленими на поздовжніх підшипниках на спицях 9 з можливістю руху поздовж спиць, ободи коліс з'єднані між собою кронштейнами, на болтах посередині між спицями, на яких закріплено по центру робочого колеса зубчастий вінець 17 та встановлене на підшипниках всередині робочого колеса на валу 6 коліна колінчастого вала, винесеного горизонтально на піврадіуса від осі обертання робочого колеса в сторону його обертання і закріпленого на кронштейнах 5 на валах робочого колеса 4 без можливості провертання, допоміжне колесо без обода, на ступиці якого встановлені спиці з двох частин: нерухомої 8а - з двох стальних полос з поздовжніми ненаскрізними вирізами, закріпленої на ступиці допоміжного колеса, та рухомої 8б - куліси, камінь якої складається із болта, закріпленого в спиці, та вставлених з обох боків спиці і закріплених гайками ззовні втулках з можливістю руху і провертання у вирізах нерухомої спиці 8а таким чином, щоб загальна довжина спиць допоміжного колеса разом із вантажем і ступицею в крайніх положеннях куліси становила: максимальна - радіус, а мінімальна - піврадіуса робочого колеса від осі обертання допоміжного колеса, а другий кінець куліси закріплений шарнірно в кронштейнах вантажів 7 робочого колеса на втулці, встановленій на болт у кронштейни вантажів з можливістю провертання втулки навкруги болта, та, встановлений на підшипниках на станині двигуна вал відбору потужності 13, на якому встановлена на шпонці зубчаста шестірня 12, зістикована із зубчастим вінцем 17 6 UA 98504 C2 робочого колеса, і махове колесо 15, на якому розміщені та закріплені на станині двигуна пристрої запуску і зупинки двигуна. Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюGravitational engine
Автори англійськоюKramarenko Vitalii Nykyforovych
Назва патенту російськоюГравитационный двигатель
Автори російськоюКрамаренко Виталий Никифорович
МПК / Мітки
МПК: F03G 3/00
Мітки: гравітаційний, двигун
Код посилання
<a href="https://ua.patents.su/9-98504-gravitacijjnijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Гравітаційний двигун</a>
Двигун

Номер патенту: 47606
Опубліковано: 10.02.2010
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
Двигун, що містить колесо, жорстко закріплене на валу, який на підшипниках встановлений на станині, та прямокутні вантажі, який відрізняється тим, що має два вали, які на підшипниках встановлені на станині, на кожному валу жорстко закріплені по два колеса з пазами та виступами і зубчасте колесо, причому відстань між валами така, щоб колеса одного вала не торкалися другого вала, та має вантажі, які висять на ланцюгах між колесами, а з кожного...
Двигун
Номер патенту: 38396
Опубліковано: 12.01.2009
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
Двигун, що містить колесо, жорстко закріплене на валу, який на підшипниках встановлений на станині, та прямокутні вантажі, який відрізняється тим, що на станині жорстко закріплені сектори зубчастих коліс, а на осях, які жорстко закріплені на колесі, висять вантажі, які жорстко закріплені на важелях, а важелі жорстко закріплені на зубчастих колесах, причому зубчасті колеса мають виріз для упора, а на других осях, які жорстко закріплені на...
Гравітаційний двигун лугині
Номер патенту: 65898
Опубліковано: 26.12.2011
Автор: Лугиня Василь Андрійович
МПК: F03B 17/00
Мітки: двигун, гравітаційний, лугині
Формула / Реферат:
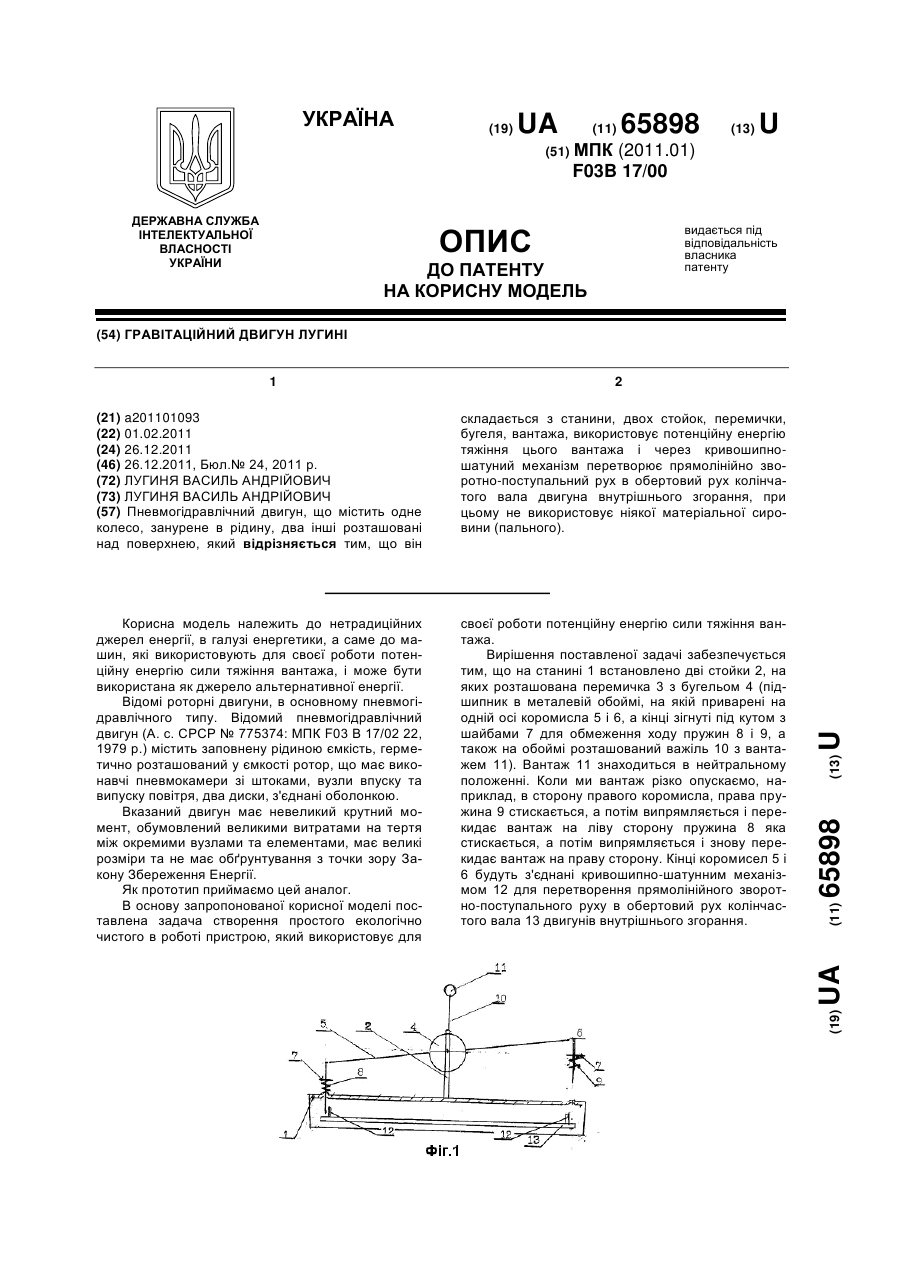
Пневмогідравлічний двигун, що містить одне колесо, занурене в рідину, два інші розташовані над поверхнею, який відрізняється тим, що він складається з станини, двох стойок, перемички, бугеля, вантажа, використовує потенційну енергію тяжіння цього вантажа і через кривошипно-шатуний механізм перетворює прямолінійно зворотно- поступальний рух в обертовий рух колінчатого вала двигуна внутрішнього згорання, при цьому не використовує ніякої...
Двигун
Номер патенту: 33502
Опубліковано: 25.06.2008
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
1. Двигун, що має колесо, жорстко закріплене на валу, та вантажі, який відрізняється тим, що на колесі жорстко закріплені зубчасті колеса, та має вантаж, на якому жорстко закріплені зубчасті колеса, який постійно зміщений від осі вала колеса в один і той же бік колесом-упором, причому вантаж з колесом жорстко не закріплений, а спирається на колесо своїми зубчастими колесами на зубчасті колеса, що закріплені на колесі.2. Двигун за п. 1,...
Гравітаційний двигун
Номер патенту: 9801
Опубліковано: 17.10.2005
Автор: Гонтар Юрій Анатолійович
МПК: F03G 3/00
Мітки: гравітаційний, двигун
Формула / Реферат:
1. Гравітаційний двигун, що містить розташований на опорах з можливістю вільного обертання на горизонтальному валу ротор, на якому рівномірно по колу встановлені об'ємні елементи, виконані у вигляді циліндрів з поршнями, який відрізняється тим, що об'ємні елементи розміщені між ротором і додатково установленим кільцевим трубопроводом та з'єднані між собою кільцевим трубопроводом, утворюючи замкнену систему, яка заповнена робочим тілом, при...
Попередній патент: Процес обробки камери з вогнетривкими стінками та застосування обробного складу для нього
Наступний патент: Бойова частина снаряда
Випадковий патент: Спосіб діагностики ефективності санації очеревинної порожнини