Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму
Номер патенту: 103507
Опубліковано: 25.12.2015
Автори: Миколаєнко Юлія Олександрівна, Слободенюк Дмитро Володимирович, Бялобржеський Олексій Володимирович, Боркунов Віталій Сергійович
Формула / Реферат
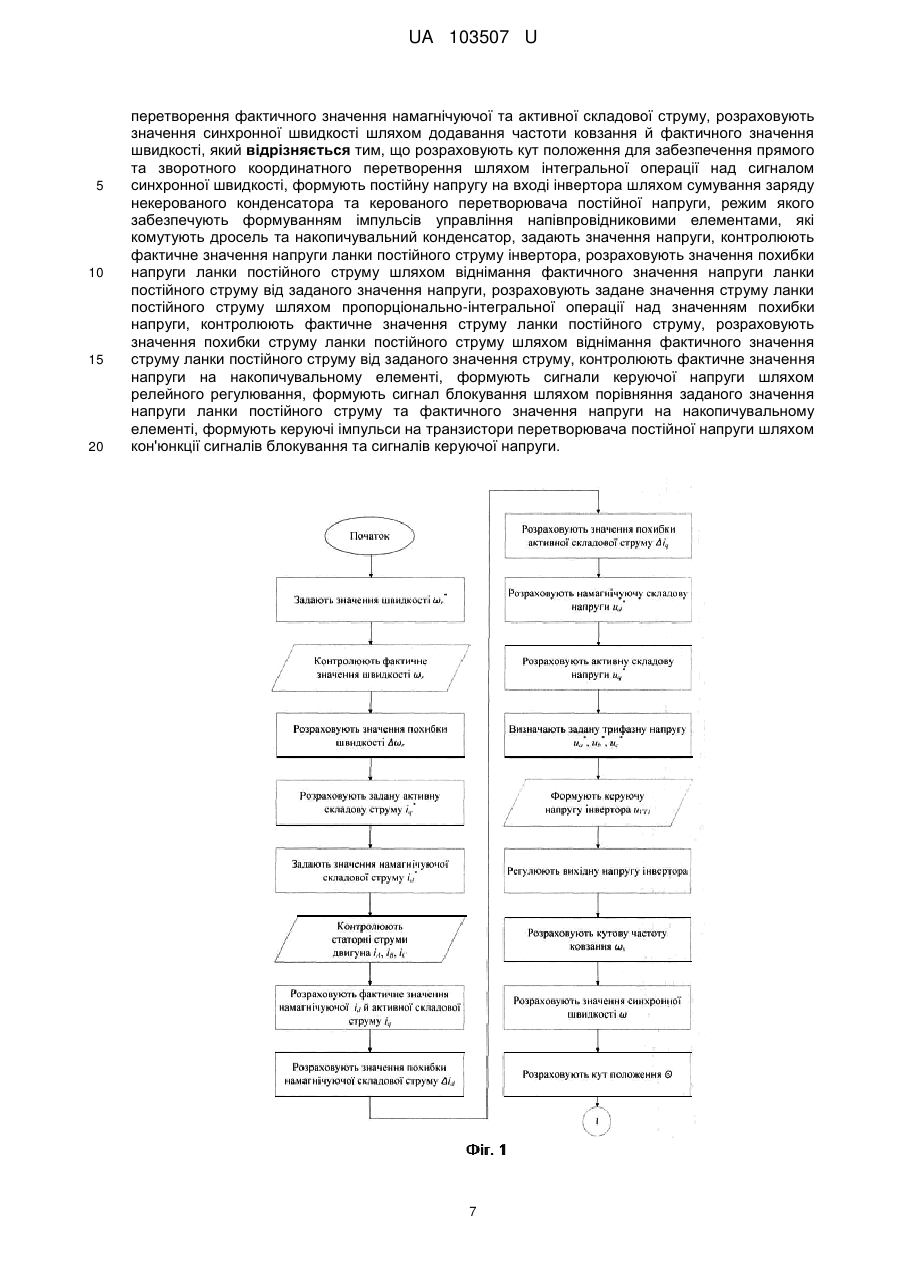
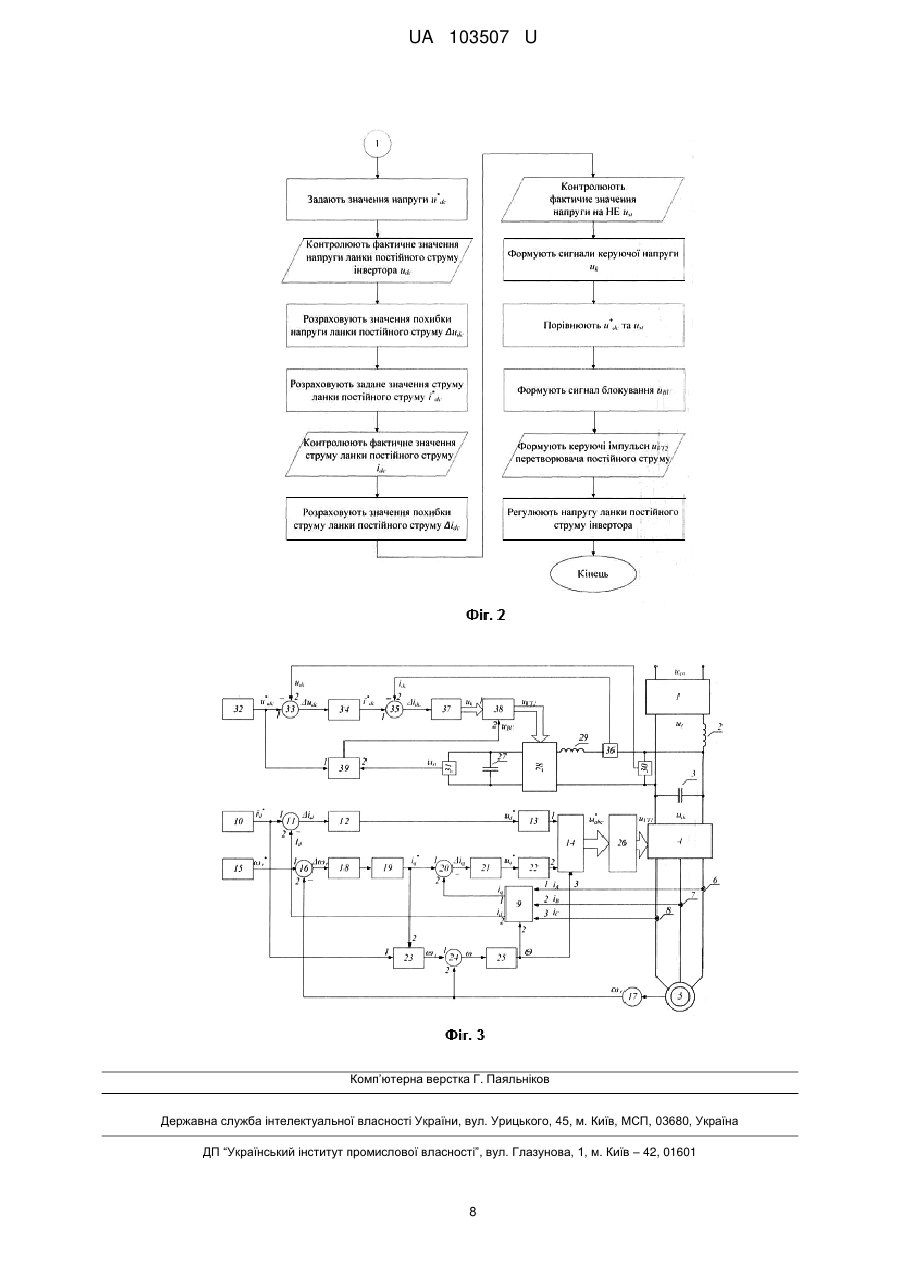
Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму, в якому управляють асинхронним двигуном шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна, задають значення швидкості, контролюють фактичне значення швидкості, розраховують значення похибки швидкості шляхом віднімання фактичного значення швидкості від заданого значення швидкості, розраховують задану активну складову струму шляхом пропорціонально-інтегральної операції над значенням похибки швидкості, задають значення намагнічуючої складової струму, контролюють статорний струм двигуна, розраховують фактичне значення намагнічуючої складової струму й фактичне значення активної складової струму шляхом векторного перетворення з трифазних статорних струмів двигуна, розраховують значення похибок намагнічуючої складової струму шляхом віднімання фактичного значення намагнічуючої складової струму від заданого значення, розраховують значення похибок активної складової струму шляхом віднімання фактичного значення активної складової струму від заданого значення, розраховують намагнічуючу складову напруги шляхом пропорційно-інтегральної операції над значенням похибки намагнічуючої складової струму, розраховують активну складову напруги шляхом пропорційно-інтегральної операції над значенням похибки активної складової струму, визначають задану трифазну напругу шляхом векторного перетворення активної та намагнічуючої складової напруги, формують керуючу напругу шляхом порівняння напруг на вентилі фаз інвертора, регулюють вихідну напругу інвертора, розраховують кутову частоту ковзання шляхом перетворення фактичного значення намагнічуючої та активної складової струму, розраховують значення синхронної швидкості шляхом додавання частоти ковзання й фактичного значення швидкості, який відрізняється тим, що розраховують кут положення для забезпечення прямого та зворотного координатного перетворення шляхом інтегральної операції над сигналом синхронної швидкості, формують постійну напругу на вході інвертора шляхом сумування заряду некерованого конденсатора та керованого перетворювача постійної напруги, режим якого забезпечують формуванням імпульсів управління напівпровідниковими елементами, які комутують дросель та накопичувальний конденсатор, задають значення напруги, контролюють фактичне значення напруги ланки постійного струму інвертора, розраховують значення похибки напруги ланки постійного струму шляхом віднімання фактичного значення напруги ланки постійного струму від заданого значення напруги, розраховують задане значення струму ланки постійного струму шляхом пропорціонально-інтегральної операції над значенням похибки напруги, контролюють фактичне значення струму ланки постійного струму, розраховують значення похибки струму ланки постійного струму шляхом віднімання фактичного значення струму ланки постійного струму від заданого значення струму, контролюють фактичне значення напруги на накопичувальному елементі, формують сигнали керуючої напруги шляхом релейного регулювання, формують сигнал блокування шляхом порівняння заданого значення напруги ланки постійного струму та фактичного значення напруги на накопичувальному елементі, формують керуючі імпульси на транзистори перетворювача постійної напруги шляхом кон'юнкції сигналів блокування та сигналів керуючої напруги.
Текст
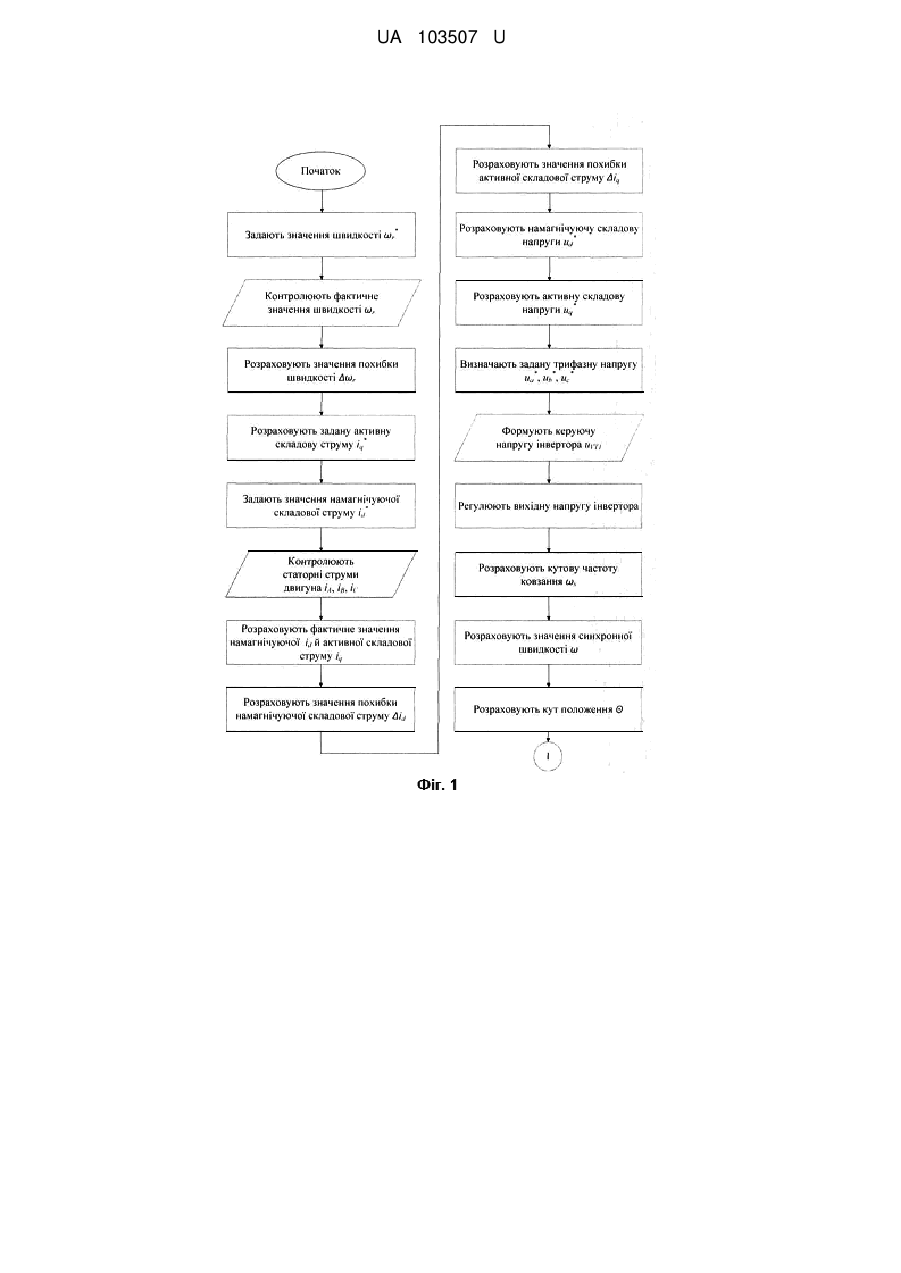
Реферат: Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму, в якому управляють асинхронним двигуном шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна. Розраховують кут положення для забезпечення прямого та зворотного координатного перетворення шляхом інтегральної операції над сигналом синхронної швидкості, формують постійну напругу на вході інвертора шляхом сумування заряду некерованого конденсатора та керованого перетворювача постійної напруги, режим якого забезпечують формуванням імпульсів управління напівпровідниковими елементами, які комутують дросель та накопичувальний конденсатор. UA 103507 U (12) UA 103507 U UA 103507 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки і може бути використана в промисловості та на електрифікованих залізницях для векторного керування електродвигуном змінного струму з автономним інвертором для забезпечення динамічних режимів руху та регенеративного гальмування з можливістю накопичення надлишкової енергії гальмування на накопичувальному елементі. Відоме технічне рішення [Спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором пат. України 55778 МПК Н02Р 21/00. Опубл. 27.12.2010 Бюл. № 24, 2010 р. Волков О. В., Косенко І. О.], спосіб керування при провалі мережної напруги асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні мережні напруги, фазні статорні струми і напруги двигуна, визначають через фазні статорні струми і напруги двигуна модулі узагальнених векторів електрорушійної сили і потокозчеплення двигуна, а через фазні мережні напруги визначають модуль вектора мережної напруги, порівнюють модуль вектора мережної напруги з його установленням і модулем вектора електрорушійної сили двигуна, при перевищенні модулем узагальненого вектора мережної напруги його установлення формують необхідні задані значення модуля вектора потокозчеплення, намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора потокозчеплення і зазначених проекцій вектора статорного струму двигуна, визначають провал мережної напруги при зменшенні модуля вектора мережної напруги нижче рівня його установлення, при провалі мережної напруги обнуляють задане значення активної проекції вектора статорного струму двигуна, порівнюють модуль вектора потокозчеплення двигуна з його заданим значенням, визначають відновлення мережної напруги при збільшенні модуля вектора мережної напруги вище рівня його установлення, при відновленні мережної напруги подають відмикаючи імпульси керування на силові ключі інвертора відповідно до штатного режиму його роботи, а при досягненні модулем вектора потокозчеплення двигуна його заданого значення формують необхідне завдання для активної проекції вектора статорного струму, контролюють струм на виході випрямляча, при провалі мережної напруги і при перевищенні модулем вектора мережної напруги значення модуля вектора електрорушійної сили двигуна регулюють фактичні значення модуля вектора потокозчеплення і намагнічуючої проекції вектора статорного струму двигуна на рівні їх заданих значень, при провалі мережної напруги після зниження модуля вектора мережної напруги менше значення модуля вектора електрорушійної сили двигуна формують відмикаючі імпульси керування для двох силових ключів в одній із фаз випрямляча, а при зменшенні вихідного струму випрямляча до нульового значення знімають відмикаючі імпульси керування з силових ключів інвертора і випрямляча. Спільними ознаками аналога та корисної моделі, що заявляється, є: спосіб керування асинхронним електроприводом з трифазним автономним інвертором, при якому контролюють фазні статорні струми двигуна, формують необхідні задані значення модуля вектора намагнічуючої й активної проекцій вектора статорного струму двигуна, на рівні яких регулюють фактичні значення модуля вектора зазначених проекцій вектора статорного струму двигуна. Причини, що перешкоджають одержанню очікуваного технічного результату: спосіб не включає в себе накопичувачів енергії, що робить неможливим режим регенеративного гальмування. Відоме технічне рішення [Пристрій і спосіб керування асинхронним електродвигуном, патент Російської федерації 2193814 МПК Н02Р 21/00. Андо Такеши, Танамачи Токуносуке, Тойота Ейичи, Наката Кийоши, Сузуки Масато, Ясуда Коуджи] спосіб векторного керування асинхронним електродвигуном, у якому асинхронний двигун управляється шляхом регулювання вихідної напруги інвертора з регулюванням частоти при регульованій напрузі й регулюванням частоти при постійній напрузі, за рахунок зміни глибини модуляції, яке виконується по команді на зміну намагнічуючої складової струму в первинній обмотці асинхронного двигуна, на який подається напруга від інвертора, і по команді на зміну компонента напруги, які формуються відповідно до згаданих відповідних компонентів і виконуються відповідно до команди на зміну активної складової струму статора, після переходу від керування в режимі регулювання частоти при регульованій напрузі до керування в режимі регулювання частоти при постійній випрямленій напрузі глибина модуляції обмежена попередньо заданою величиною обмеження й при збільшенні вихідної частоти інвертора величина сигналу команди на зміну намагнічуючої складової струму статора збільшується за умови, що заданий намагнічуючий струм підтримують постійної величини. Спільними ознаками аналога і корисної моделі, що заявляється, є: спосіб векторного керування асинхронним електродвигуном, у якому асинхронний двигун управляється шляхом регулювання вихідної напруги інвертора, за рахунок зміни глибини модуляції, яке виконується 1 UA 103507 U 5 10 15 20 25 30 35 40 45 50 55 по команді на зміну намагнічуючої складової струму в первинній обмотці асинхронного двигуна, на який подається напруга від інвертора, і по команді на зміну компонента напруги, які формуються відповідно до згаданих відповідних компонентів і виконуються відповідно до команди на зміну активної складової струму статора, заданий намагнічуючий струм підтримують на постійній величині. Причини, що перешкоджають одержанню очікуваного технічного результату: спосіб не включає в себе накопичувачів енергії, що робить неможливим режим регенеративного гальмування; спосіб не включає в себе вихідного випрямляча, що робить неможливим живлення системи від мережі змінного струму. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є [Пристрій векторного керування й спосіб здійснюючий його, патент США 6528966. МПК Н02Р 1/24, Опубл. 21.02.2002 Сеунг Хо На] векторне керування асинхронним електродвигуном, у якому асинхронний двигун управляється шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний без датчиків для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна, що містить етапи; одержання значення швидкості відповідно до заданого на вході контролера швидкості; отримання значення похибки швидкості шляхом віднімання фактичного значення з отриманого датчика швидкості від заданого значення швидкості; одержання заданої активної складової струму шляхом пропорціонально-інтегральної операції над значенням похибки швидкості; одержання синхронної швидкості; задання значення намагнічуючої складової струму, фактичного значення намагнічуючої складової струму й фактичного значення активної складової струму шляхом векторного перетворення з трифазних статорних струмів двигуна з датчиків струму; отримання значення похибок намагнічуючої та активної складової струму шляхом віднімання фактичного значення намагнічуючої та активної складової струму від заданого значення намагнічуючої та активної складової струму; генерації активної складової напруги й намагнічуючої складової напруги шляхом пропорційно-інтегральної операції над значенням похибок намагнічуючої та активної складової струму; векторного перетворення в трифазну напругу; забезпечення трифазної напруги в інвертор шляхом широтно-імпульсної модуляції; регулювання похибки активної та намагнічуючої складової струму виконується окремо; одержання синхронної швидкості, містить у собі: стадію генерування кутової частоти ковзання шляхом перетворення фактичного значення намагнічуючої та активної складової струму; стадію, на якій частота ковзання й задане значення швидкості додають для одержання синхронної швидкості. Спільними ознаками аналога і корисної моделі, що заявляється, векторне керування асинхронним електродвигуном, у якому асинхронний двигун управляється шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний без датчиків для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна, що містить етапи; одержання значення швидкості відповідно до заданого на вході контролера швидкості; отримання значення похибки швидкості шляхом віднімання фактичного значення з отриманого датчика швидкості від заданого значення швидкості; одержання заданої активної складової струму шляхом пропорціонально-інтегральної операції над значенням похибки швидкості; одержання синхронної швидкості; задання значення намагнічуючої складової струму, фактичного значення намагнічуючої складової струму й фактичного значення активної складової струму шляхом векторного перетворення з трифазних статорних струмів двигуна з датчиків струму; отримання значення похибок намагнічуючої та активної складової струму шляхом віднімання фактичного значення намагнічуючої та активної складової струму від заданого значення намагнічуючої та активної складової струму; генерації активної складової напруги й намагнічуючої складової напруги шляхом пропорційно-інтегральної операції над значенням похибок намагнічуючої та активної складової струму; векторного перетворення в трифазну напругу; забезпечення трифазної напруги в інвертор шляхом широтно-імпульсної модуляції; регулювання похибки активної та намагнічуючої складової струму виконується окремо; одержання синхронної швидкості, містить у собі: стадію генерування кутової частоти ковзання шляхом перетворення фактичного значення намагнічуючої та активної складової струму; стадію, на якій частота ковзання й задане значення швидкості додають для одержання синхронної швидкості. Причини, що перешкоджають одержанню очікуваного технічного результату: спосіб не включає в себе накопичувачів енергії, що робить неможливим режим регенеративного гальмування; спосіб не включає в себе вихідного випрямляча, що робить неможливим живлення системи від мережі змінного струму. Відоме технічне рішення вибрано як прототип корисної моделі, що заявляється. 2 UA 103507 U 5 10 15 20 25 30 35 40 45 50 55 В основу корисної моделі поставлена задача мінімізації втрат електричної енергії, що забезпечується способом з керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного стум з мінімізацією значень спотворень струмів та реактивної потужності. Зазначений технічний результат досягається тим, що спосіб керування накопичувальнокомпенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму, у якому управляють асинхронним двигуном шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна, задають значення швидкості, контролюють фактичне значення швидкості, розраховують значення похибки швидкості шляхом віднімання фактичного значення швидкості від заданого значення швидкості, розраховують задану активну складову струму шляхом пропорціонально-інтегральної операції над значенням похибки швидкості, задають значення намагнічуючої складової струму, контролюють статорний струм двигуна, розраховують фактичне значення намагнічуючої складової струму й фактичне значення активної складової струму шляхом векторного перетворення з трифазних статорних струмів двигуна, розраховують значення похибок намагнічуючої складової струму шляхом віднімання фактичного значення намагнічуючої складової струму від заданого значення, розраховують значення похибок активної складової струму шляхом віднімання фактичного значення активної складової струму від заданого значення, розраховують намагнічуючу складову напруги шляхом пропорційно-інтегральної операції над значенням похибки намагнічуючої складової струму, розраховують активну складову напруги шляхом пропорційноінтегральної операції над значенням похибки активної складової струму, визначають задану трифазну напругу шляхом векторного перетворення активної та намагнічуючої складової напруги, формують керуючу напругу шляхом порівняння напруг на вентилі фаз інвертора, регулюють вихідну напругу інвертора, розраховують кутову частоту ковзання шляхом перетворення фактичного значення намагнічуючої та активної складової струму, розраховують значення синхронної швидкості, шляхом додавання частоти ковзання й фактичного значення швидкості, згідно з корисною моделлю, розраховують кут положення для забезпечення прямого та зворотного координатного перетворення, шляхом інтегральної операції над сигналом синхронної швидкості, формують постійну напругу на вході інвертора шляхом сумування заряду некерованого конденсатора та керованого перетворювача постійної напруги, режим якого забезпечують формуванням імпульсів управління напівпровідниковими елементами, які комутують дросель та накопичувальний конденсатор, задають значення напруги, контролюють фактичне значення напруги ланки постійного струму інвертора, розраховують значення похибки напруги ланки постійного струму шляхом віднімання фактичного значення напруги ланки постійного струму від заданого значення напруги, розраховують задане значення струму ланки постійного струму шляхом пропорціонально-інтегральної операції над значенням похибки напруги, контролюють фактичне значення струму ланки постійного струму, розраховують значення похибки струму ланки постійного струму, шляхом віднімання фактичного значення струму ланки постійного струму від заданого значення струму, контролюють фактичне значення напруги на накопичувальному елементі, формують сигнали керуючої напруги шляхом релейного регулювання, формують сигнал блокування шляхом порівняння заданого значення напруги ланки постійного струму та фактичного значення напруги на накопичувальному елементі, формують керуючі імпульси на транзистори перетворювача постійної напруги шляхом кон'юнкції сигналів блокування та сигналів керуючої напруги. Корисна модель пояснюється кресленням на якому (фіг. 1, 2) наведено алгоритм способу керування накопичувально-компенсуючим пристроєм; наведена схема пропонованого пристрою (фіг. 3) яка містить: 1 - випрямляч; 2 - індуктивність LC-фільтра; 3 - ємність LC-фільтра; 4 автономний інвертор; 5 - тяговий електродвигун змінного струму; 6 - перший датчик струму; 7 другий датчик струму; 8 - третій датчик струму; 9 - прямий координатний перетворювач; 10 задатчик намагнічуючої складової струму; 11 - перший суматор; 12 - регулятор намагнічуючої складової струм струму; 13 - перший обмежувач; 14 - зворотній координатний перетворювач; 15 - задатчик швидкості; 16 - другий суматор; 17 - датчик швидкості; 18 регулятор швидкості; 19 другий обмежувач; 20 - третій суматор; 21 регулятор активної складової струму; 22 - третій обмежувач; 23 - генератор кутової частоти ковзання; 24 - четвертий суматор; 25 - інтегратор; 26 - блок широтно-імпульсної модуляції; 27 накопичувальний елемент; 28 перетворювач постійної напруги; 29 - дросель; 30 - перший датчик напруги; 31 - другий датчик напруги; 32 - задатчик напруги; 33 - п'ятий суматор; 34 - блок регулятора напруги;35 - шостий суматор; 36 - четвертий датчик струму; 37 - релейний регулятор; 38 - елемент блокування; 39 - блок порівняння напруги. 3 UA 103507 U Векторне керування асинхронним електродвигуном, у якому управління асинхронним двигуном шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна. 5 * Задають значення швидкості відповідно до заданого r . Розраховують значення похибки r шляхом віднімання фактичного значення r отриманого з датчика швидкості * від заданого значення швидкості r r r* r . (1) швидкості Розраховують задану активну складову струму 10 операції над значенням похибки швидкості HSC k wp i* шляхом пропорціонально-інтегральної q r i* JK r k sv JK r k sv k wi q . (2) 2 S 3Z pL mk SS Tks 12Z pL mk SS Tks s r Задають значення намагнічуючої складової струму i * . Розраховують фактичне значення d намагнічуючої складової струму i d й фактичне значення активної складової струму i q шляхом 15 векторного перетворення з трифазних статорних струмів двигуна i A ,iB , i C з першого, другого та третього датчиків струму 2 2 2 i d 3 i A cos iB cos( 3 ) i C cos( 3 ) 2 2 2 i q i A sin iB sin( ) i C sin( ) . (3) 3 3 3 1 i 0 ( i A iB i C ) 3 Розраховують значення похибки намагнічуючої складової струму i d шляхом віднімання фактичного значення намагнічуючої складової струму i d від заданого значення i * d i d i * i d . (4) d 20 Розраховують значення похибки активної складової струму i q шляхом віднімання фактичного значення активної складової струму i q від заданого значення i* q iq i* iq . (5) q Розраховують намагнічуючу складову напруги u * шляхом пропорційно-інтегральної операції d над значенням похибки намагнічуючої складової струму i d 25 TsR s u* ki 1 d . (6) s 2Tkc k fc k sc (2Tkc k fc k sc / R s )s i d Розраховують активну складову напруги u * шляхом пропорційно-інтегральної операції над d значенням похибки активної складової струму i q d HCC1 k p q HCC2 k p u* TsR s ki 1 q . (7) s 2Tkc k fc k sc (2Tkc k fc k sc / R s )s i q Шляхом векторного перетворення активної 30 * * * визначають задану трифазну напругу u a , u b , u c 4 u * та намагнічуючої складової напруги u * d q UA 103507 U * u a u d cos u q sin ; 2 2 * ub u d cos( ) u q sin( ). (8) 3 3 * u c (u a ub ). Формують керуючу напругу шляхом порівняння напруг на вентилі фаз інвертора, наприклад для вентилів фази А: * u 1a 1if (ucarr ua ) else 0; VT * u 1a 0if (ucarr ua ) else1. VT 5 (9) 2 ucarr arctgtg fmod 2t . , (10) 2 де fmod - частота модуляції. де Розраховують значення синхронної швидкості , що містить у собі: стадію де розраховують кутову частоту ковзання s шляхом перетворення фактичного значення намагнічуючої i d та активної i q складової струму 10 s i dR r . (11) i qL r Розраховують значення синхронної швидкості , що забезпечується шляхом додавання частоти ковзання s й фактичного значення швидкості r s r . (12) 15 20 Розраховують кут положення для забезпечення прямого та зворотного координатного перетворення шляхом інтегральної операції над сигналом синхронної частоти . Постійну напругу на вході інвертора формують шляхом сумування заряду некерованого конденсатора та керованого перетворювача постійної напруги, режим якого забезпечують формуванням імпульсів управління напівпровідниковими елементами, які комутують дросель та накопичувальний конденсатор: i d dc u st F L b F dt u Cf u dc . , (13) 1 FiL dt u st C st де u st - напруга на накопичувачі; u dc - напруга на вході автономного інвертора; L b індуктивність дроселя; u Cf - напруга на фільтрі; iL - струм дроселя; C st - ємність накопичувача; F - комутаційна функція F u VT.br u VT.acc 25 Задають значення напруги u * . Розраховують значення похибки напруги ланки постійного dc струму u dc шляхом віднімання фактичного значення напруги ланки постійного струму u dc , отриманої з першого датчика напруги від заданого значення напруги u * dc u dc u * u dc . (14) dc Розраховують 30 задане значення струму ланки постійного струму пропорціонально-інтегральної операції над значенням похибки напруги u dc HVC (s) k p i* k i k v Cf k C v f2 dc . (15) s 3Tkv 12sTkv udc 5 i* dc шляхом UA 103507 U Розраховують значення похибки струму ланки постійного струму i dc шляхом віднімання фактичного значення струму ланки постійного струму i dc , отриманої з четвертого датчика струму від заданого значення струму i * dc i dc i * i dc . (16) dc Формують сигнали керуючої напруги 5 uk.br uk.acc де i 10 * dc i * dc 1при i dc i , i * dc * dc * dc * dc * dc * dc * dc * dc u k шляхом релейного регулювання: 0; 0 при i dc i , i 0; ,(17) 1при i dc i , i 0; 0 при i dc i , i ширина зони 0. гістерезису релейного регулятора, 0,051dc .nom розрахункового струму автономного інвертора, i приймається * dc рівною - похідна струму автономного інвертора. Формують сигнал блокування u BU шляхом порівняння заданого значення напруги ланки постійного струму u * та фактичного значення напруги на накопичувальному елементі u st dc отриманого з другого датчика напруги uBU 1приu st u * ; dc 0 приu st u . * dc (18) Формують керуючі імпульси 15 u TV 2 на транзистори перетворювача постійної напруги, шляхом об'єднання сигналів блокування u BU та сигналів керуючої напруги u k u VT.br uk.br uBU ; u VT.acc uk.acc uBU . 20 (19) В результаті роботи наведеного способу забезпечується: накопичення енергії, яка виробляється електродвигуном в процесі гальмування на накопичувально-компенсуючий пристрій в схемі перетворювача частоти з ланкою постійного струму (регенеративне гальмування), акумулювання та використання накопиченої енергії для роботи електродвигуна в наступному циклі руху та для підтримки заданого рівня напруги в ланці постійного струму. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму, в якому управляють асинхронним двигуном шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна, задають значення швидкості, контролюють фактичне значення швидкості, розраховують значення похибки швидкості шляхом віднімання фактичного значення швидкості від заданого значення швидкості, розраховують задану активну складову струму шляхом пропорціонально-інтегральної операції над значенням похибки швидкості, задають значення намагнічуючої складової струму, контролюють статорний струм двигуна, розраховують фактичне значення намагнічуючої складової струму й фактичне значення активної складової струму шляхом векторного перетворення з трифазних статорних струмів двигуна, розраховують значення похибок намагнічуючої складової струму шляхом віднімання фактичного значення намагнічуючої складової струму від заданого значення, розраховують значення похибок активної складової струму шляхом віднімання фактичного значення активної складової струму від заданого значення, розраховують намагнічуючу складову напруги шляхом пропорційно-інтегральної операції над значенням похибки намагнічуючої складової струму, розраховують активну складову напруги шляхом пропорційноінтегральної операції над значенням похибки активної складової струму, визначають задану трифазну напругу шляхом векторного перетворення активної та намагнічуючої складової напруги, формують керуючу напругу шляхом порівняння напруг на вентилі фаз інвертора, регулюють вихідну напругу інвертора, розраховують кутову частоту ковзання шляхом 6 UA 103507 U 5 10 15 20 перетворення фактичного значення намагнічуючої та активної складової струму, розраховують значення синхронної швидкості шляхом додавання частоти ковзання й фактичного значення швидкості, який відрізняється тим, що розраховують кут положення для забезпечення прямого та зворотного координатного перетворення шляхом інтегральної операції над сигналом синхронної швидкості, формують постійну напругу на вході інвертора шляхом сумування заряду некерованого конденсатора та керованого перетворювача постійної напруги, режим якого забезпечують формуванням імпульсів управління напівпровідниковими елементами, які комутують дросель та накопичувальний конденсатор, задають значення напруги, контролюють фактичне значення напруги ланки постійного струму інвертора, розраховують значення похибки напруги ланки постійного струму шляхом віднімання фактичного значення напруги ланки постійного струму від заданого значення напруги, розраховують задане значення струму ланки постійного струму шляхом пропорціонально-інтегральної операції над значенням похибки напруги, контролюють фактичне значення струму ланки постійного струму, розраховують значення похибки струму ланки постійного струму шляхом віднімання фактичного значення струму ланки постійного струму від заданого значення струму, контролюють фактичне значення напруги на накопичувальному елементі, формують сигнали керуючої напруги шляхом релейного регулювання, формують сигнал блокування шляхом порівняння заданого значення напруги ланки постійного струму та фактичного значення напруги на накопичувальному елементі, формують керуючі імпульси на транзистори перетворювача постійної напруги шляхом кон'юнкції сигналів блокування та сигналів керуючої напруги. 7 UA 103507 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 21/00, B60L 7/10
Мітки: керування, схемі, перетворювача, ланкою, постійного, пристроєм, струму, спосіб, накопичувально-компенсуючим, частоти
Код посилання
<a href="https://ua.patents.su/10-103507-sposib-keruvannya-nakopichuvalno-kompensuyuchim-pristroehm-v-skhemi-peretvoryuvacha-chastoti-z-lankoyu-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму</a>
Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму
Номер патенту: 69961
Опубліковано: 25.05.2012
Автори: Сухорук Сергій Валентинович, Ломонос Андрій Іванович
МПК: G01R 31/00, G06F 1/18
Мітки: спосіб, системі, розрахунку, керування, параметрів, навантаження, постійного, машин, перетворювачем, взаємного, струму, силовим
Формула / Реферат:
Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму, при якому формується режим навантаження з впливом на коло обмотки збудження і задається постійною та змінними складовими сигналу керування, який відрізняється тим, що для розрахунку параметрів керування використовується гібридна нейронна система, а для розрахунку кожного з параметрів керування використовується окрема...
Спосіб керування силовим активним фільтром постійного струму з паралельним підключенням інвертора напруги
Номер патенту: 72104
Опубліковано: 10.08.2012
Автор: Зубенко Василь Анатолійович
МПК: H02M 1/15
Мітки: паралельним, струму, спосіб, силовим, підключенням, інвертора, напруги, активним, постійного, фільтром, керування
Формула / Реферат:
Спосіб керування силовим активним фільтром постійного струму з паралельним включенням інвертора напруги, який відрізняється тим, що вимірюють напругу пульсацій на виході випрямляча, напругу та струм в паралельній гілці фільтра та струм в послідовній гілці, розраховують напругу на послідовній гілці, визначають комплексний опір гілок фільтра на частоті і-ої гармоніки та розраховують вихідну напругу компенсації інвертора на частоті і-ої...
Спосіб регулювання струму навантаження трифазного перетворювача для частотно-керованих електроприводів змінного струму

Номер патенту: 79056
Опубліковано: 10.04.2013
Автор: Кулагін Дмитро Олександрович
МПК: H02M 7/12
Мітки: трифазного, навантаження, перетворювача, частотно-керованих, спосіб, струму, регулювання, змінного, електроприводів
Формула / Реферат:
Спосіб регулювання струму навантаження трифазного перетворювача для частотно-керованих електроприводів змінного струму, який полягає у тому, що вимірюють струм навантаження, визначають сигнал помилки, як різницю заданого та виміряного значень струму, інтегрують сигнал помилки, формують імпульси керування вентилями перетворювача з кутом керування, пропорційним сумі сигналів результату інтегрування і значення помилки, який відрізняється тим,...
Спосіб розрахунку параметрів керування силовими перетворювачами в системі взаємного навантаження машин постійного струму
Номер патенту: 82257
Опубліковано: 25.07.2013
Автори: Ломонос Андрій Іванович, Срібна Марина Вікторівна
МПК: G06F 1/18
Мітки: навантаження, машин, розрахунку, спосіб, силовими, струму, взаємного, параметрів, керування, постійного, перетворювачами, системі
Формула / Реферат:
Спосіб розрахунку параметрів керування силовими перетворювачами в системі взаємного навантаження машин постійного струму, при якому формують режим навантаження та режим компенсації з впливом на коло обмотки збудження, який відрізняється тим, що параметри керування задають шпаруватістю та кутом зсуву і для їх розрахунку використовують регресійну математичну модель, а для розрахунку кожного з параметрів керування використовують окреме рівняння...
Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі
Номер патенту: 92068
Опубліковано: 25.07.2014
Автори: Вакульчик Володимир Григорович, Довженко Володимир Порфирович, Жигало Володимир Олександрович
Мітки: аномальних, керування, спосіб, явищах, електроприводу, постійного, роботою, мережі, напрузі, живильної, струму, тиристорного
Формула / Реферат:
Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі, що включає визначення режиму роботи електродвигуна (випрямний або інверторний), вимірювання величини напруги живильної мережі і значення ЕРС (швидкості) електродвигуна, порівняння вимірюваних величин і формування сигналу в систему автоматичного керування приводом при наближенні співвідношення вимірюваних величин до...
Попередній патент: Рідке середовище для діагностики трихомоніазу “скм-1-у”
Наступний патент: Спосіб випуску відбитої руди шарами
Випадковий патент: Прутковий конвеєр