Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна
Номер патенту: 106288
Опубліковано: 25.04.2016
Автори: Топалов Андрій Миколайович, Коробко Олексій Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Козлов Олексій Валерійович, Герасін Олександр Сергійович
Формула / Реферат
Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна, згідно з яким у робочому просторі резервуара встановлюють перший та другий вимірювачі і здійснюють одночасно неперервну реєстрацію їх електричних сигналів, причому перший та другий вимірювачі виконують у вигляді гідростатичних датчиків тиску, а значення рівня рідини в резервуарі визначають гідростатичним методом на основі реєстрованих електричних сигналів, який відрізняється тим, що у робочому просторі резервуара додатково встановлюють третій та четвертий вимірювачі, які виконують у вигляді гідростатичних датчиків тиску, та здійснюють одночасно неперервну реєстрацію вихідних електричних сигналів першого, другого, третього та четвертого вимірювачів, які попередньо встановлюють по периметру днища суднового резервуара у вершинах умовного прямокутника, відповідні сторони якого паралельні повздовжній та поперечній осям судна, при цьому обчислюють поточне середнє арифметичне значення від реєстрованих електричних сигналів всіх вимірювачів, здійснюють його подальшу фільтрацію за допомогою фільтра низьких частот та на основі відфільтрованого сигналу визначають гідростатичним методом поточне значення рівня рідини в судновому резервуарі з компенсацією впливу крену та диференту судна.
Текст
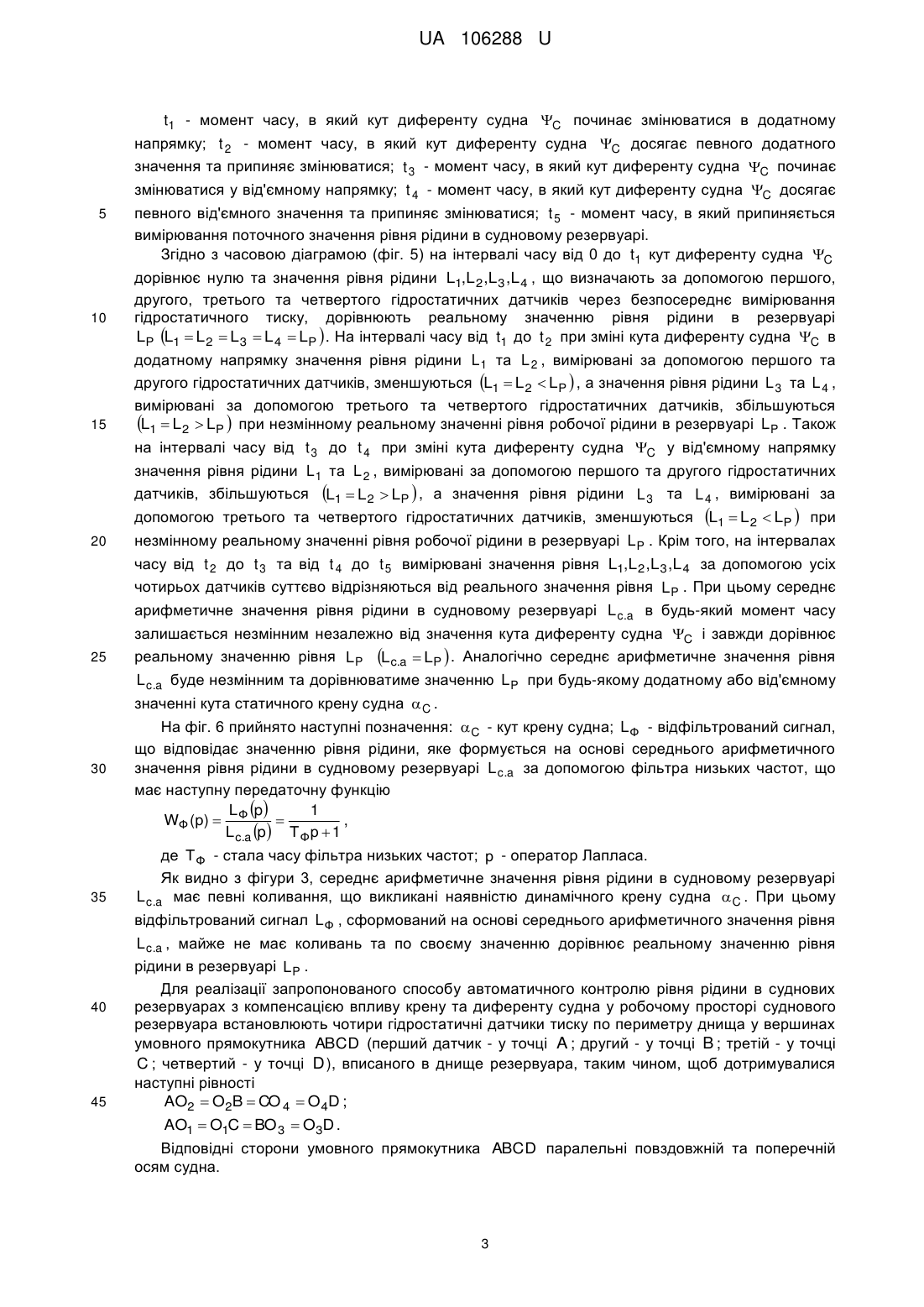
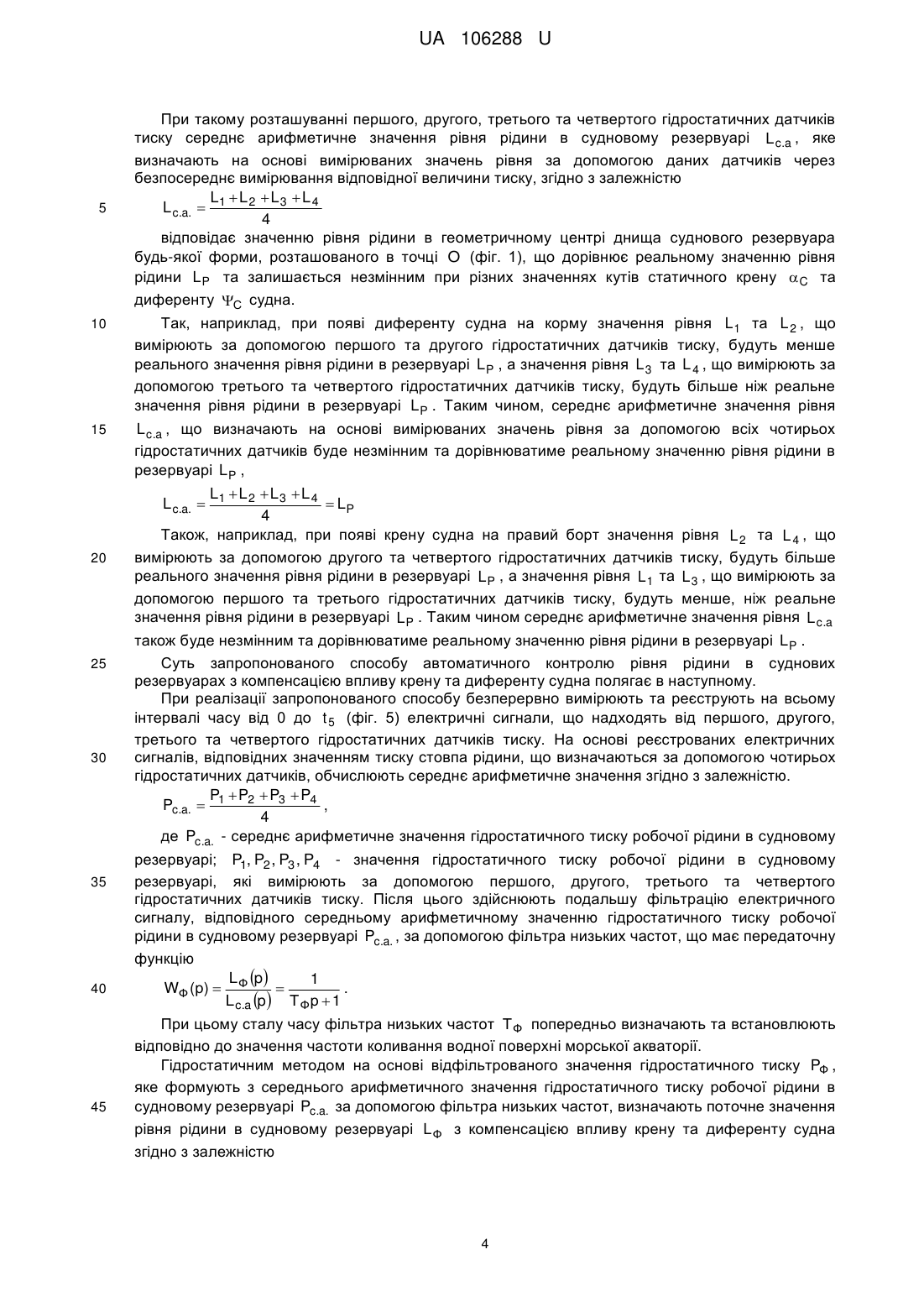
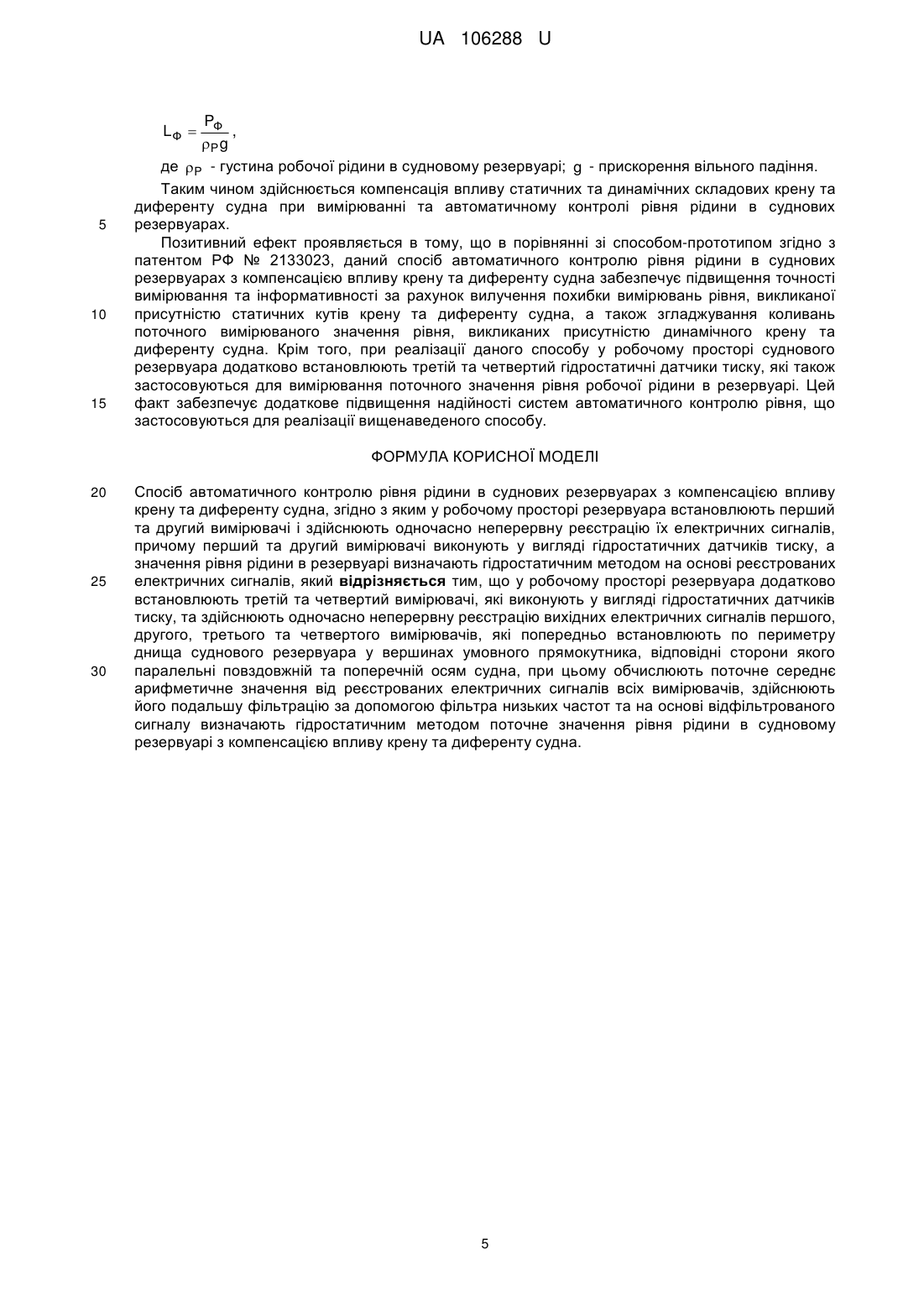
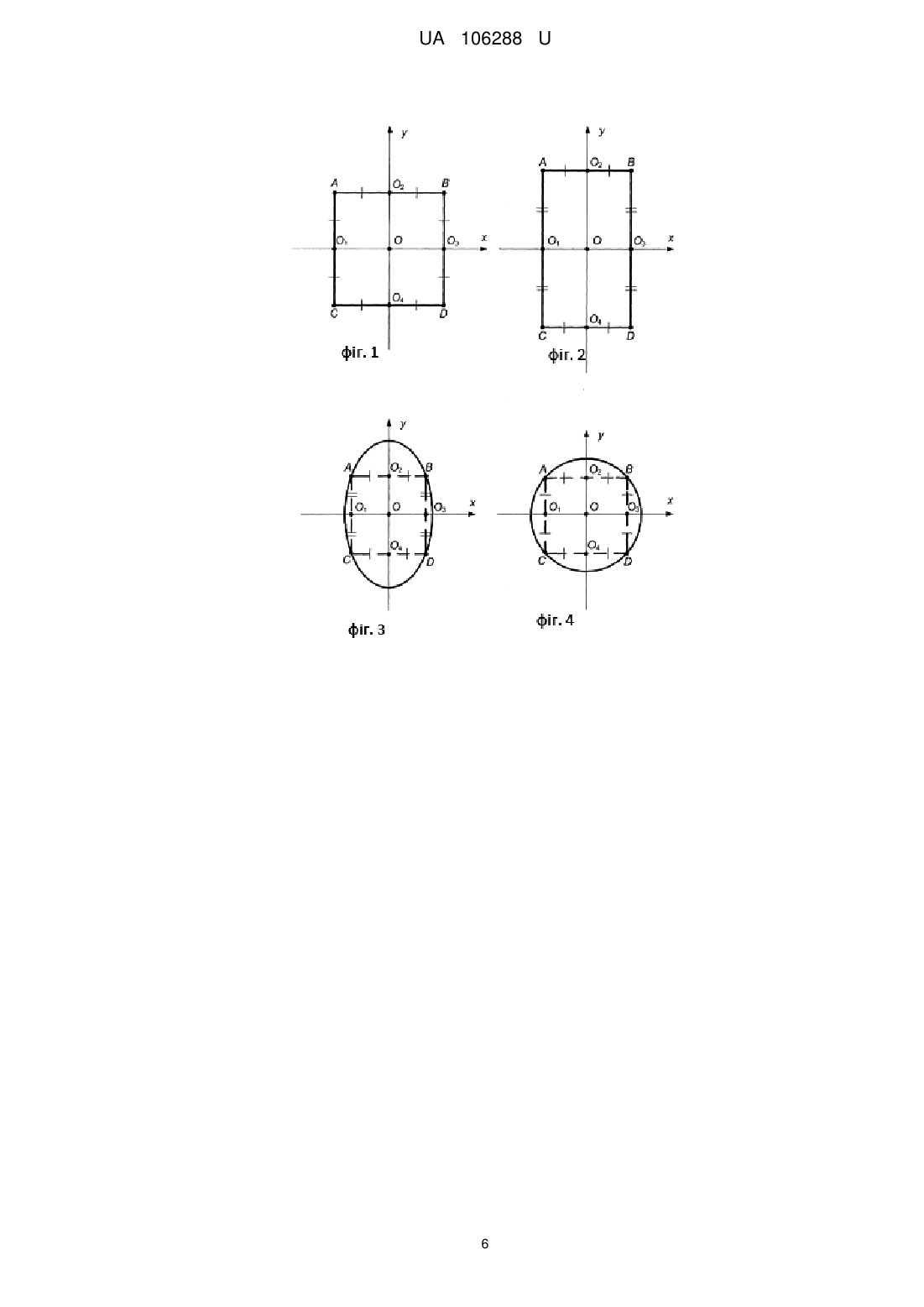
Реферат: Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна, згідно з яким у робочому просторі резервуара встановлюють перший та другий вимірювачі і здійснюють одночасно неперервну реєстрацію їх електричних сигналів, причому перший та другий вимірювачі виконують у вигляді гідростатичних датчиків тиску, а значення рівня рідини в резервуарі визначають гідростатичним методом на основі реєстрованих електричних сигналів. У робочому просторі резервуара додатково встановлюють третій та четвертий вимірювачі, які виконують у вигляді гідростатичних датчиків тиску, та здійснюють одночасно неперервну реєстрацію вихідних електричних сигналів першого, другого, третього та четвертого вимірювачів, які попередньо встановлюють по периметру днища суднового резервуара у вершинах умовного прямокутника, відповідні сторони якого паралельні повздовжній та поперечній осям судна, при цьому обчислюють поточне середнє арифметичне значення від реєстрованих електричних сигналів всіх вимірювачів. UA 106288 U (12) UA 106288 U UA 106288 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки й може бути використана при проектуванні систем автоматичного контролю рівня рідини в суднових резервуарах різнотипного призначення. Відомо про способи вимірювання та автоматичного контролю рівня рідких та сипучих середовищ в різнотипних суднових резервуарах, які базуються на розміщенні в даних резервуарах поплавкових, ємнісних, ультразвукових, радарних та ротаційних датчиків рівня, датчиків тиску і термочутливих датчиків, а також на подальшій реєстрації електричних сигналів, що надходять від датчиків, та визначенні поточного значення рівня. Прикладом такого способу є спосіб вимірювання щільності та рівня рідини [Патент РФ № 2260776 С1, G01F 23/14, G01N 9/26, заявл. 06.04.2004, опубл. 20.09.2005], що полягає в розміщенні у робочому просторі резервуара двох датчиків тиску на фіксованій відстані один від одного по висоті резервуара, фіксації значення тиску нижнього датчика в момент переходу рідиною рівня верхнього датчика, використання цього зафіксованого тиску і значення відстані між датчиками для обчислення щільності та рівня рідини в резервуарі. Такий спосіб має наступні проблеми: - низька точність вимірювання при застосуванні даного способу для вимірювання значення рівня рідини в суднових резервуарах при наявності певних значень кутів статичного крену та диференту судна, що суттєво впливає на показання датчиків тиску, встановлених по висоті резервуара, та значно збільшує похибку їх вимірювань; - низька інформативність при застосуванні даного способу для вимірювання значення рівня рідини в резервуарах на різнотипних плавзасобах через наявність постійних коливань рідини в резервуарі та, відповідно, вимірюваного значення її рівня, що викликане присутністю динамічного крену та диференту даних плавзасобів через постійне коливання водної поверхні морської акваторії. Найбільш близьким до запропонованого є спосіб автоматичного контролю рівня і щільності розчину у випарному апараті [Патент РФ №2133023 С1, G01N 9/26, заявл. 10.02.1998, опубл. 10.07.1999], що прийнятий як прототип. Згідно з даним способом у сепараційному просторі випарного апарата нижче рівня розчину встановлюють два гідростатичні вимірювачі на фіксованій відстані один над одним, здійснюють одночасно неперервну реєстрацію їх електричних сигналів, обчислюють поточне значення різниці між даними сигналами і на підставі цієї різниці та значення відстані між вимірювачами обчислюють поточні значення рівня та щільності рідини у випарному апараті. Такий спосіб має наступні проблеми: - низька точність вимірювання при застосуванні даного способу для вимірювання значення рівня рідини у резервуарах, встановлених на різнотипних плавзасобах, що пов'язано з можливістю появи суттєвої похибки вимірювання через наявність різних значень статичного крену та диференту відповідних плавзасобів; - низька інформативність при застосуванні даного способу для вимірювання значення рівня рідини в суднових резервуарах через присутність коливань робочої рідини всередині резервуара та, як наслідок, поточного вимірюваного значення рівня, оскільки судна та різнотипні плавзасоби завжди мають відповідний динамічний крен та диферент певної величини, що викликано постійним коливанням водної поверхні акваторії. В основу винаходу поставлено задачу удосконалення способу автоматичного контролю рівня рідини в резервуарах шляхом компенсації впливу статичних та динамічних складових крену та диференту судна за рахунок додаткового встановлення третього та четвертого вимірювачів у робочому просторі резервуара таким чином, що всі чотири вимірювачі розташовані по периметру днища суднового резервуара у вершинах умовного прямокутника, для здійснення обчислень поточного середнього арифметичного значення від реєстрованих електричних сигналів всіх вимірювачів, його подальшої фільтрації за допомогою фільтра низьких частот та визначення поточного значення рівня рідини гідростатичним методом на основі відфільтрованого сигналу, що дозволить суттєво підвищити точність вимірювання рівня з виключенням похибки, викликаної наявністю різних значень статичного крену та диференту судна, а також підвищити інформативність даного способу з виключенням постійних коливань поточного вимірюваного значення рівня, що викликані присутністю динамічного крену та диференту судна. Поставлена задача вирішується тим, що при реалізації способу автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна, згідно з яким у робочому просторі резервуара встановлюють перший та другий вимірювачі та здійснюють одночасно неперервну реєстрацію їх електричних сигналів, причому перший та другий вимірювачі виконують у вигляді гідростатичних датчиків тиску, а значення рівня рідини в 1 UA 106288 U 5 10 15 20 25 30 35 40 45 50 резервуарі визначають гідростатичним методом на основі реєстрованих електричних сигналів, згідно з пропозицією у робочому просторі резервуара додатково встановлюють третій та четвертий вимірювачі, які виконують у вигляді гідростатичних датчиків тиску, та здійснюють одночасно неперервну реєстрацію вихідних електричних сигналів першого, другого, третього та четвертого вимірювачів, які попередньо встановлюють по периметру днища суднового резервуара у вершинах умовного прямокутника, відповідні сторони якого паралельні повздовжній та поперечній осям судна, при цьому обчислюють поточне середнє арифметичне значення від реєстрованих електричних сигналів всіх вимірювачів, здійснюють його подальшу фільтрацію за допомогою фільтра низьких частот та на основі відфільтрованого сигналу визначають гідростатичним методом поточне значення рівня рідини в судновому резервуарі з компенсацією впливу крену та диференту судна. Винахідницький задум полягає в тому, що спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна дозволяє визначати поточне значення рівня на основі реєстрованих електричних сигналів, що надходить від чотирьох гідростатичних датчиків тиску, та водночас здійснювати компенсацію впливу статичних та динамічних складових крену та диференту судна за допомогою обчислення середнього арифметичного значення від реєстрованих електричних сигналів всіх вимірювачів та його подальшої фільтрації за допомогою фільтра низьких частот. При цьому суттєво підвищується точність вимірювання рівня та інформативність даного способу. Суть запропонованого способу пояснюється за допомогою фігур 1-6. На фіг. 1-4 наведено схематичні зображення днищ суднових резервуарів різнотипних форм: а - квадратна; б - прямокутна; в - овальна; г - кругла; на фіг. 5 наведено часові діаграми процесів зміни вимірюваного значення рівня рідини в судновому резервуарі першим, другим, третім та четвертим гідростатичними датчиками в залежності від зміни кута статичного диференту судна; на фіг. 6 наведено часові діаграми процесів зміни середнього арифметичного значення рівня рідини в судновому резервуарі при наявності динамічного крену судна, викликаного коливанням водної поверхні морської акваторії. На фігурі 1 прийнято наступні позначення: x - поперечна вісь суднового резервуара, яка проходить паралельно поперечній осі судна; у-повздовжня вісь суднового резервуара, що проходить паралельно повздовжньої осі судна; O - точка, що знаходиться в геометричному центрі днища суднового резервуара; A,B, C,D - вершини умовного прямокутника, вписаного в днище суднового резервуара, в яких встановлюються перший, другий, третій та четвертий гідростатичні датчики тиску; O1, O2 , O3 , O4 - точки, що розташовані по периметру умовного прямокутника ABCD , вписаного в днище суднового резервуара. Для резервуарів з квадратним (фіг. 1) та прямокутним (фіг. 2) днищами вершини умовного прямокутника ABCD , в яких встановлюють перший, другий, третій та четвертий гідростатичні датчики тиску, співпадають з вершинами прямокутного периметра даних днищ. Як видно з фігури 1, перший, другий, третій та четвертий гідростатичні датчики тиску встановлюють в судновому резервуарі будь-якої форми по периметру днища у вершинах умовного прямокутника ABCD таким чином, щоб дотримувалися наступні геометричні співвідношення AO2 O2B CO 4 O4D ; AO1 O1C BO 3 O3D . Крім того, гідростатичні датчики тиску встановлюють у днищі будь-якого суднового резервуара у наступному порядку: перший датчик - у точці A ; другий - у точці B ; третій - у точці C ; четвертий - у точці D . На фіг. 5 прийнято наступні позначення: L P - реальне значення рівня робочої рідини в судновому резервуарі; C - значення кута диференту судна (приймає додатне значення при нахилі судна на корму); L1,L 2 ,L3 ,L 4 - значення рівня рідини в судновому резервуарі, що визначають за допомогою першого, другого, третього та четвертого гідростатичних датчиків, відповідно, через безпосереднє вимірювання гідростатичного тиску рідини; L c.a. - середнє арифметичне значення рівня рідини в судновому резервуарі, яке визначають на основі вимірюваних значень рівня за допомогою першого, другого, третього та четвертого гідростатичних датчиків згідно з залежністю L L2 L3 L 4 L c.a. 1 ; 4 2 UA 106288 U t1 - момент часу, в який кут диференту судна C починає змінюватися в додатному напрямку; t 2 - момент часу, в який кут диференту судна C досягає певного додатного 5 10 15 значення та припиняє змінюватися; t 3 - момент часу, в який кут диференту судна C починає змінюватися у від'ємному напрямку; t 4 - момент часу, в який кут диференту судна C досягає певного від'ємного значення та припиняє змінюватися; t 5 - момент часу, в який припиняється вимірювання поточного значення рівня рідини в судновому резервуарі. Згідно з часовою діаграмою (фіг. 5) на інтервалі часу від 0 до t1 кут диференту судна C дорівнює нулю та значення рівня рідини L1,L 2 ,L3 ,L 4 , що визначають за допомогою першого, другого, третього та четвертого гідростатичних датчиків через безпосереднє вимірювання гідростатичного тиску, дорівнюють реальному значенню рівня рідини в резервуарі LP L1 L 2 L 3 L 4 LP . На інтервалі часу від t1 до t 2 при зміні кута диференту судна C в додатному напрямку значення рівня рідини L 1 та L 2 , вимірювані за допомогою першого та другого гідростатичних датчиків, зменшуються L1 L 2 LP , а значення рівня рідини L 3 та L 4 , вимірювані за допомогою третього та четвертого гідростатичних датчиків, збільшуються L1 L2 LP при незмінному реальному значенні рівня робочої рідини в резервуарі LP . Також на інтервалі часу від t 3 до t 4 при зміні кута диференту судна C у від'ємному напрямку значення рівня рідини L 1 та L 2 , вимірювані за допомогою першого та другого гідростатичних датчиків, збільшуються L1 L 2 LP , а значення рівня рідини L 3 та L 4 , вимірювані за L1 L2 LP при незмінному реальному значенні рівня робочої рідини в резервуарі L P . Крім того, на інтервалах часу від t 2 до t 3 та від t 4 до t 5 вимірювані значення рівня L1,L 2 ,L3 ,L 4 зa допомогою усіх допомогою третього та четвертого гідростатичних датчиків, зменшуються 20 чотирьох датчиків суттєво відрізняються від реального значення рівня L P . При цьому середнє арифметичне значення рівня рідини в судновому резервуарі L c.a в будь-який момент часу 25 30 35 40 45 залишається незмінним незалежно від значення кута диференту судна C і завжди дорівнює реальному значенню рівня L P Lc.a LP . Аналогічно середнє арифметичне значення рівня L c.a буде незмінним та дорівнюватиме значенню L P при будь-якому додатному або від'ємному значенні кута статичного крену судна C . На фіг. 6 прийнято наступні позначення: C - кут крену судна; L Ф - відфільтрований сигнал, що відповідає значенню рівня рідини, яке формується на основі середнього арифметичного значення рівня рідини в судновому резервуарі L c.a за допомогою фільтра низьких частот, що має наступну передаточну функцію L p 1 , WФ (р) Ф L c.a p Т Фр 1 де Т Ф - стала часу фільтра низьких частот; р - оператор Лапласа. Як видно з фігури 3, середнє арифметичне значення рівня рідини в судновому резервуарі L c.a має певні коливання, що викликані наявністю динамічного крену судна C . При цьому відфільтрований сигнал L Ф , сформований на основі середнього арифметичного значення рівня L c.a , майже не має коливань та по своєму значенню дорівнює реальному значенню рівня рідини в резервуарі L P . Для реалізації запропонованого способу автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна у робочому просторі суднового резервуара встановлюють чотири гідростатичні датчики тиску по периметру днища у вершинах умовного прямокутника ABCD (перший датчик - у точці A ; другий - у точці B ; третій - у точці C ; четвертий - у точці D ), вписаного в днище резервуара, таким чином, щоб дотримувалися наступні рівності AO2 O2B CO 4 O4D ; AO1 O1C BO 3 O3D . Відповідні сторони умовного прямокутника ABCD паралельні повздовжній та поперечній осям судна. 3 UA 106288 U 5 10 15 20 25 30 35 40 45 При такому розташуванні першого, другого, третього та четвертого гідростатичних датчиків тиску середнє арифметичне значення рівня рідини в судновому резервуарі L c.a , яке визначають на основі вимірюваних значень рівня за допомогою даних датчиків через безпосереднє вимірювання відповідної величини тиску, згідно з залежністю L L2 L3 L 4 L c.a. 1 4 відповідає значенню рівня рідини в геометричному центрі днища суднового резервуара будь-якої форми, розташованого в точці O (фіг. 1), що дорівнює реальному значенню рівня рідини L P та залишається незмінним при різних значеннях кутів статичного крену C та диференту С судна. Так, наприклад, при появі диференту судна на корму значення рівня L 1 та L 2 , що вимірюють за допомогою першого та другого гідростатичних датчиків тиску, будуть менше реального значення рівня рідини в резервуарі L P , а значення рівня L 3 та L 4 , що вимірюють за допомогою третього та четвертого гідростатичних датчиків тиску, будуть більше ніж реальне значення рівня рідини в резервуарі L P . Таким чином, середнє арифметичне значення рівня L c.a , що визначають на основі вимірюваних значень рівня за допомогою всіх чотирьох гідростатичних датчиків буде незмінним та дорівнюватиме реальному значенню рівня рідини в резервуарі L P , L L L3 L 4 L c.a. 1 2 LP 4 Також, наприклад, при появі крену судна на правий борт значення рівня L 2 та L 4 , що вимірюють за допомогою другого та четвертого гідростатичних датчиків тиску, будуть більше реального значення рівня рідини в резервуарі L P , а значення рівня L 1 та L 3 , що вимірюють за допомогою першого та третього гідростатичних датчиків тиску, будуть менше, ніж реальне значення рівня рідини в резервуарі L P . Таким чином середнє арифметичне значення рівня L c.a також буде незмінним та дорівнюватиме реальному значенню рівня рідини в резервуарі L P . Суть запропонованого способу автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна полягає в наступному. При реалізації запропонованого способу безперервно вимірюють та реєструють на всьому інтервалі часу від 0 до t 5 (фіг. 5) електричні сигнали, що надходять від першого, другого, третього та четвертого гідростатичних датчиків тиску. На основі реєстрованих електричних сигналів, відповідних значенням тиску стовпа рідини, що визначаються за допомогою чотирьох гідростатичних датчиків, обчислюють середнє арифметичне значення згідно з залежністю. P P P3 P4 Pc.a. 1 2 , 4 де Pc.a. - середнє арифметичне значення гідростатичного тиску робочої рідини в судновому резервуарі; P1, P2 , P3 , P4 - значення гідростатичного тиску робочої рідини в судновому резервуарі, які вимірюють за допомогою першого, другого, третього та четвертого гідростатичних датчиків тиску. Після цього здійснюють подальшу фільтрацію електричного сигналу, відповідного середньому арифметичному значенню гідростатичного тиску робочої рідини в судновому резервуарі Pc.a. , за допомогою фільтра низьких частот, що має передаточну функцію L p 1 WФ (р) Ф . L c.a p Т Фр 1 При цьому сталу часу фільтра низьких частот Т Ф попередньо визначають та встановлюють відповідно до значення частоти коливання водної поверхні морської акваторії. Гідростатичним методом на основі відфільтрованого значення гідростатичного тиску PФ , яке формують з середнього арифметичного значення гідростатичного тиску робочої рідини в судновому резервуарі Pc.a. за допомогою фільтра низьких частот, визначають поточне значення рівня рідини в судновому резервуарі L Ф з компенсацією впливу крену та диференту судна згідно з залежністю 4 UA 106288 U PФ , P g де P - густина робочої рідини в судновому резервуарі; g - прискорення вільного падіння. Таким чином здійснюється компенсація впливу статичних та динамічних складових крену та диференту судна при вимірюванні та автоматичному контролі рівня рідини в суднових резервуарах. Позитивний ефект проявляється в тому, що в порівнянні зі способом-прототипом згідно з патентом РФ № 2133023, даний спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна забезпечує підвищення точності вимірювання та інформативності за рахунок вилучення похибки вимірювань рівня, викликаної присутністю статичних кутів крену та диференту судна, а також згладжування коливань поточного вимірюваного значення рівня, викликаних присутністю динамічного крену та диференту судна. Крім того, при реалізації даного способу у робочому просторі суднового резервуара додатково встановлюють третій та четвертий гідростатичні датчики тиску, які також застосовуються для вимірювання поточного значення рівня робочої рідини в резервуарі. Цей факт забезпечує додаткове підвищення надійності систем автоматичного контролю рівня, що застосовуються для реалізації вищенаведеного способу. LФ 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна, згідно з яким у робочому просторі резервуара встановлюють перший та другий вимірювачі і здійснюють одночасно неперервну реєстрацію їх електричних сигналів, причому перший та другий вимірювачі виконують у вигляді гідростатичних датчиків тиску, а значення рівня рідини в резервуарі визначають гідростатичним методом на основі реєстрованих електричних сигналів, який відрізняється тим, що у робочому просторі резервуара додатково встановлюють третій та четвертий вимірювачі, які виконують у вигляді гідростатичних датчиків тиску, та здійснюють одночасно неперервну реєстрацію вихідних електричних сигналів першого, другого, третього та четвертого вимірювачів, які попередньо встановлюють по периметру днища суднового резервуара у вершинах умовного прямокутника, відповідні сторони якого паралельні повздовжній та поперечній осям судна, при цьому обчислюють поточне середнє арифметичне значення від реєстрованих електричних сигналів всіх вимірювачів, здійснюють його подальшу фільтрацію за допомогою фільтра низьких частот та на основі відфільтрованого сигналу визначають гідростатичним методом поточне значення рівня рідини в судновому резервуарі з компенсацією впливу крену та диференту судна. 5 UA 106288 U 6 UA 106288 U 7 UA 106288 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic control of level of liquid in ship reservoirs with compensation of effect of roll and trim of the vessel
Автори англійськоюKondratenko Yurii Panteleiovych, Kozlov O, Kondratenko Galyna Volodymyrivna, Korobko Oleksii Volodymyrovych, Topalov Andrii Mykolaiovych, Gerasin Oleksandr Sergiiovych
Назва патенту російськоюСпособ автоматического контроля уровня жидкости в судовых резервуарах с компенсацией влияния крена и дифферента судна
Автори російськоюКондратенко Юрий Пантелеевич, Козлов Алексей Валериевич, Кондратенко Галина Владимиривна, Коробко Алексей Владимирович, Топалов Андрей Николаевич, Герасин Александр Сергеевич
МПК / Мітки
МПК: G01F 23/00
Мітки: компенсацією, рідини, автоматичного, диференту, судна, резервуарах, крену, впливу, спосіб, суднових, рівня, контролю
Код посилання
<a href="https://ua.patents.su/10-106288-sposib-avtomatichnogo-kontrolyu-rivnya-ridini-v-sudnovikh-rezervuarakh-z-kompensaciehyu-vplivu-krenu-ta-diferentu-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна</a>
Спосіб автоматичного контролю рівня рідини в резервуарах з дискретним самотестуванням
Номер патенту: 102167
Опубліковано: 26.10.2015
Автори: Кондратенко Юрій Пантелійович, Коробко Олексій Володимирович, Топалов Андрій Миколайович, Козлов Олексій Валерійович, Герасін Олександр Сергійович, Кондратенко Галина Володимирівна
МПК: G01F 23/00
Мітки: дискретним, резервуарах, автоматичного, самотестуванням, рідини, рівня, контролю, спосіб
Формула / Реферат:
Спосіб автоматичного контролю рівня рідини в резервуарах з дискретним самотестуванням, в якому у робочому просторі резервуара встановлюють два вимірювачі на відповідній фіксованій відстані один від одного по висоті резервуара та здійснюють одночасно неперервну реєстрацію їх електричних сигналів, причому перший вимірювач виконують у вигляді гідростатичного датчика тиску, а значення рівня рідини в резервуарі визначають гідростатичним методом...
Система автоматичного контролю рівня рідини в резервуарах з дискретним самотестуванням
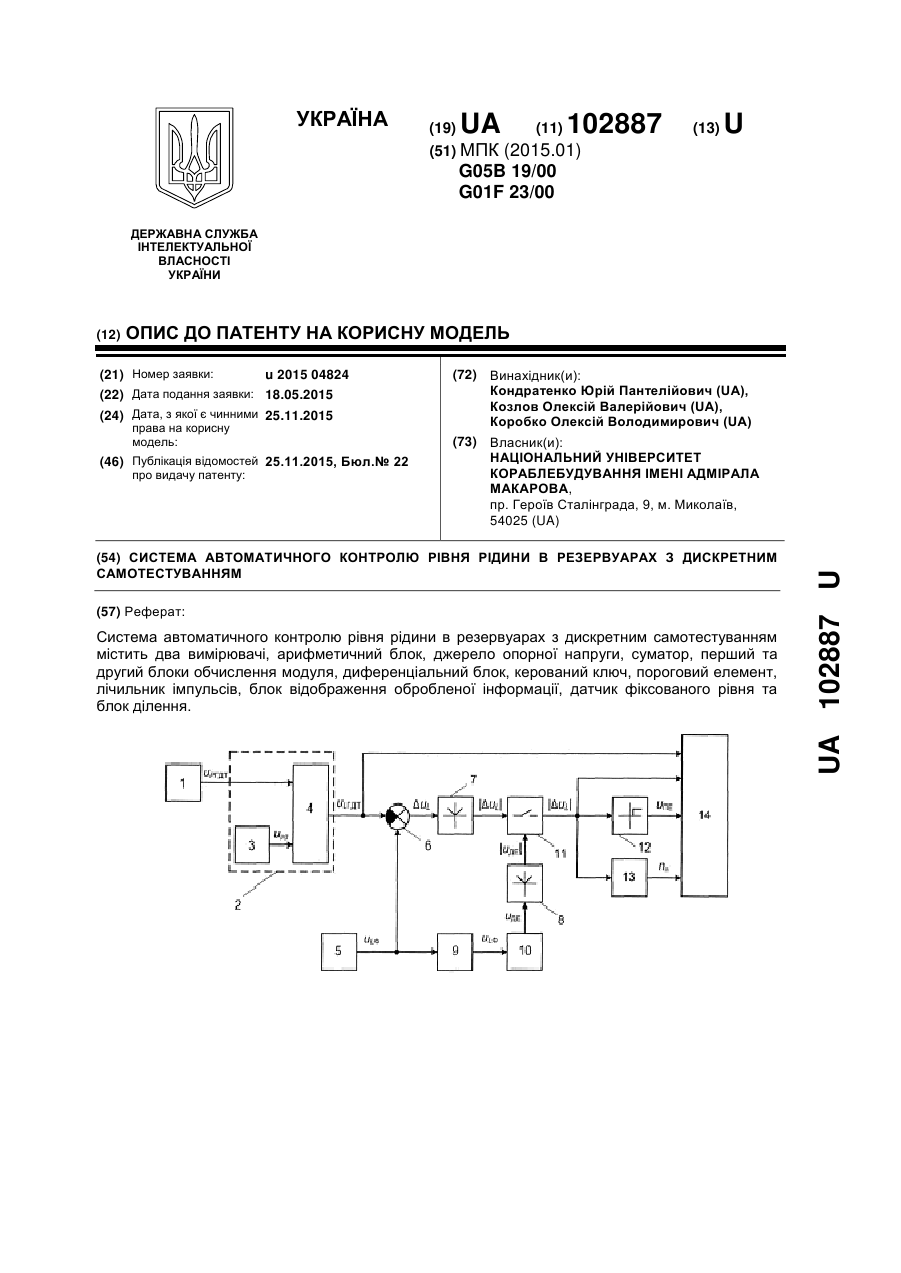
Номер патенту: 102887
Опубліковано: 25.11.2015
Автори: Кондратенко Юрій Пантелійович, Козлов Олексій Валерійович, Коробко Олексій Володимирович
МПК: G01F 23/00, G05B 19/00
Мітки: контролю, резервуарах, рідини, система, рівня, автоматичного, дискретним, самотестуванням
Формула / Реферат:
Система автоматичного контролю рівня рідини в резервуарах з дискретним самотестуванням, яка містить два вимірювачі, встановлені у робочому просторі резервуара на відповідній фіксованій відстані один від одного по висоті резервуара, та арифметичний блок, вхід якого підключений до виходу першого вимірювача, причому перший вимірювач виконаний у вигляді гідростатичного датчика тиску, яка відрізняється тим, що до складу системи введено джерело...
Пристрій для визначення осадки, крену та диференту плавзасобу

Номер патенту: 61049
Опубліковано: 11.07.2011
Автори: Жуков Юрій Даниїлович, Зівенко Олексій Васильович, Гордєєв Борис Миколайович
МПК: B63B 39/00
Мітки: крену, пристрій, осадки, визначення, плавзасобу, диференту
Формула / Реферат:
Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що датчики рівня розташовані довільно, але не в одній вертикальній...
Пристрій для вимірювання рівня рідини в резервуарах
Номер патенту: 75076
Опубліковано: 15.03.2006
Автори: Дульский Микола Васильович, Березуцький Михайло Миколаєвич
МПК: G01F 23/30, G01F 23/00
Мітки: рівня, рідини, вимірювання, пристрій, резервуарах
Формула / Реферат:
Пристрій для вимірювання рівня рідини в резервуарах, що містить тягар, підвішений на мірну стрічку, на яку насаджена поплавкова камера, який відрізняється тим, що на мірну стрічку над поплавковою камерою надіті порожнинні міри довжини.
Пристрій для визначення осадки, крену і диференту плавзасобу
Номер патенту: 18570
Опубліковано: 25.12.1997
Автори: Гордєєв Борис Миколайович, Половніков Валєрій Алєксандровіч, Жуков Юрій Даниїлович, Алєксандров Михайло Миколайович
МПК: B63B 39/00
Мітки: осадки, визначення, плавзасобу, пристрій, диференту, крену
Формула / Реферат:
Устройство для определения осадки, крена и дифферента плавсредства, содержащее по меньшей мере четыре датчика и вторичный прибор с коммутатором и индикатором, причем каждый из датчиков подключен к коммутатору, отличающееся тем, что вторичный прибор содержит вычислительный блок им последовательно соединенные импульсный высокочастотный генератор и высокочастотный приемник, причем упомянутый генератор электрически связан с коммутатором, а выход...
Попередній патент: Спосіб ізолювання зопіклону із біологічних рідин
Наступний патент: Нейрон
Випадковий патент: Спосіб одержання мастила