Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами
Номер патенту: 107719
Опубліковано: 10.02.2015
Автори: Гадяка Володимир Григорович, Паненко Вадим Григорович, Гончаров Валерій Володимирович, Філімоніхін Геннадій Борисович
Формула / Реферат
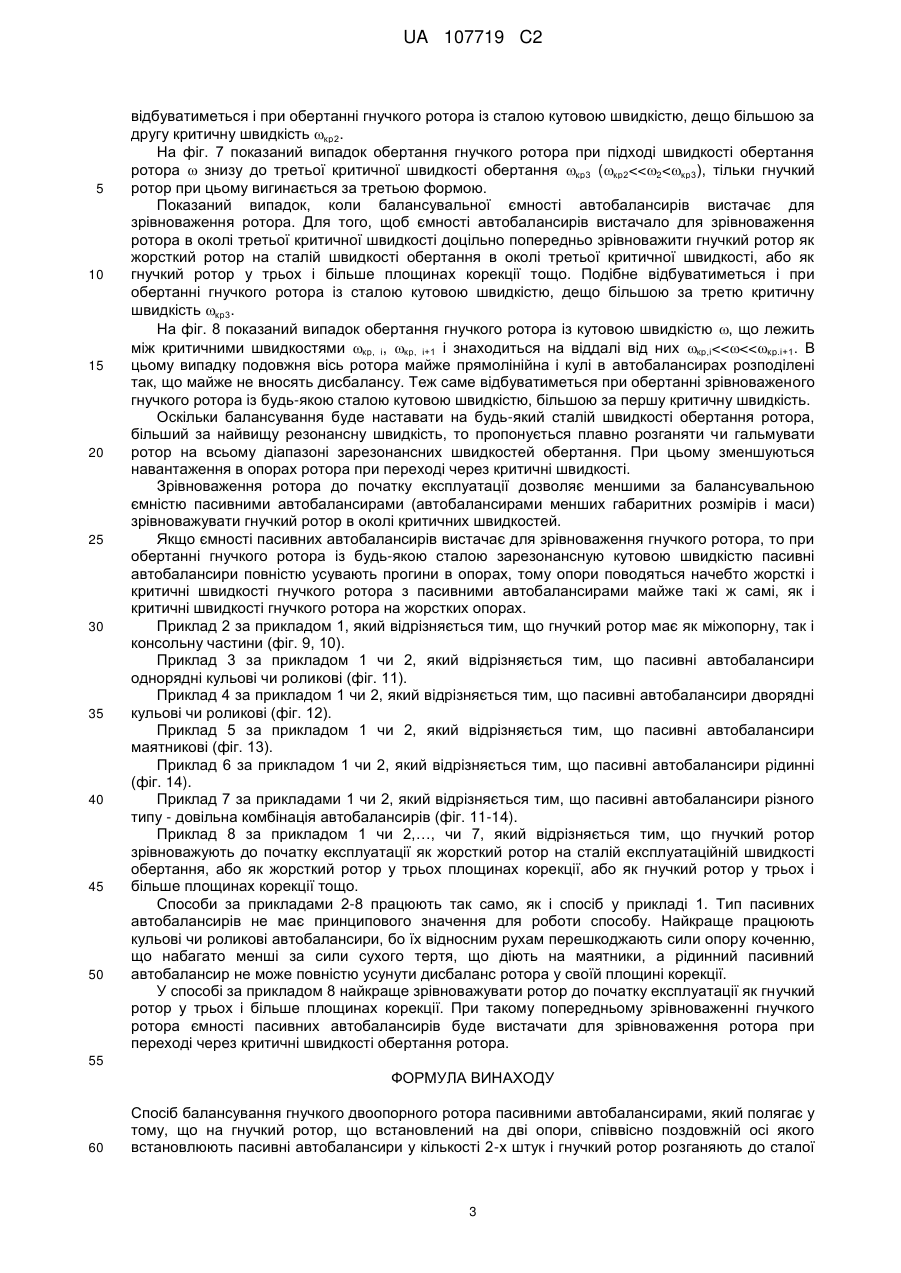
Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами, який полягає у тому, що на гнучкий ротор, що встановлений на дві опори, співвісно поздовжній осі якого встановлюють пасивні автобалансири у кількості 2-х штук і гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну швидкість, який відрізняється тим, що пасивні автобалансири розміщують в площинах, близьких до опор, а опори виконують пружно-в'язкими.
Текст
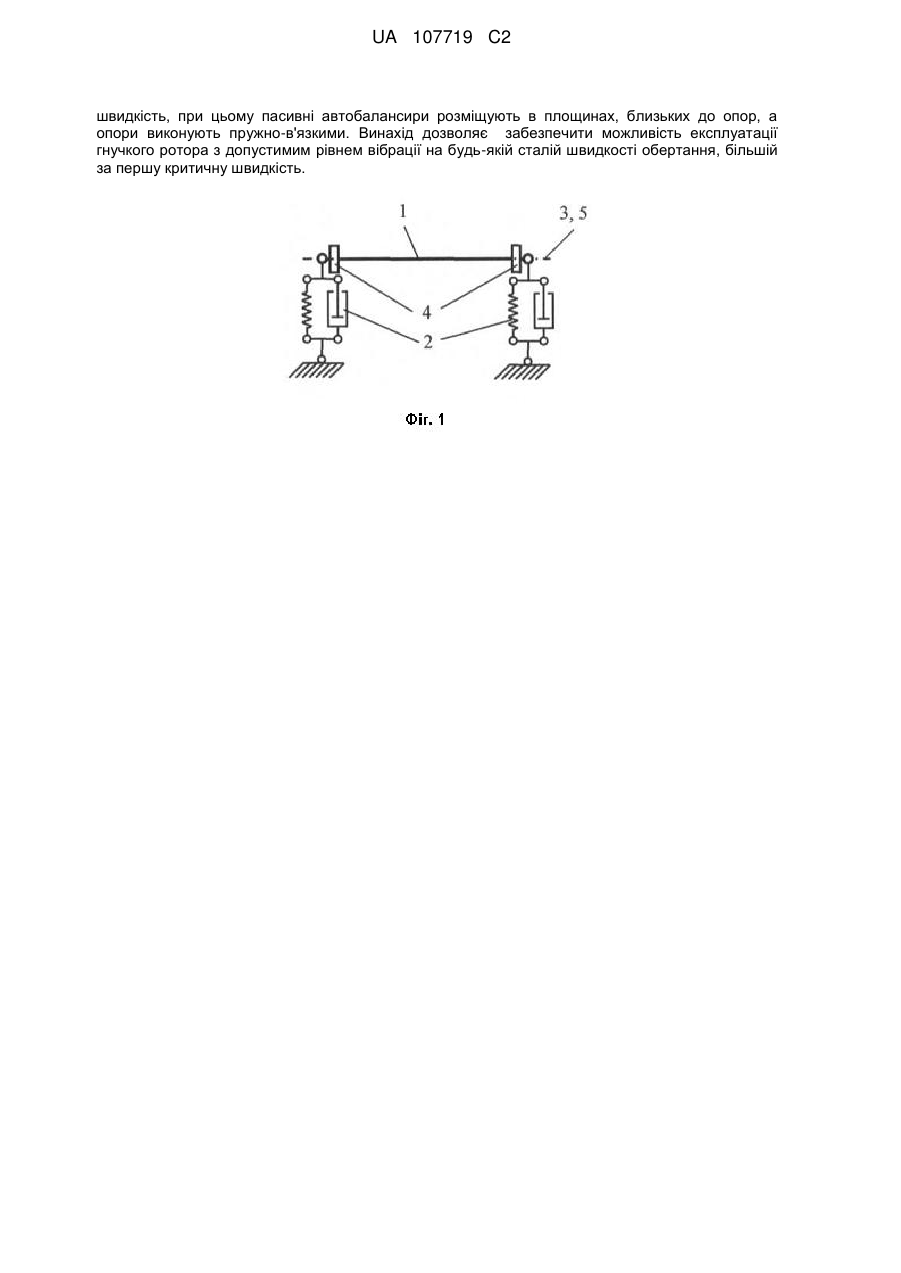
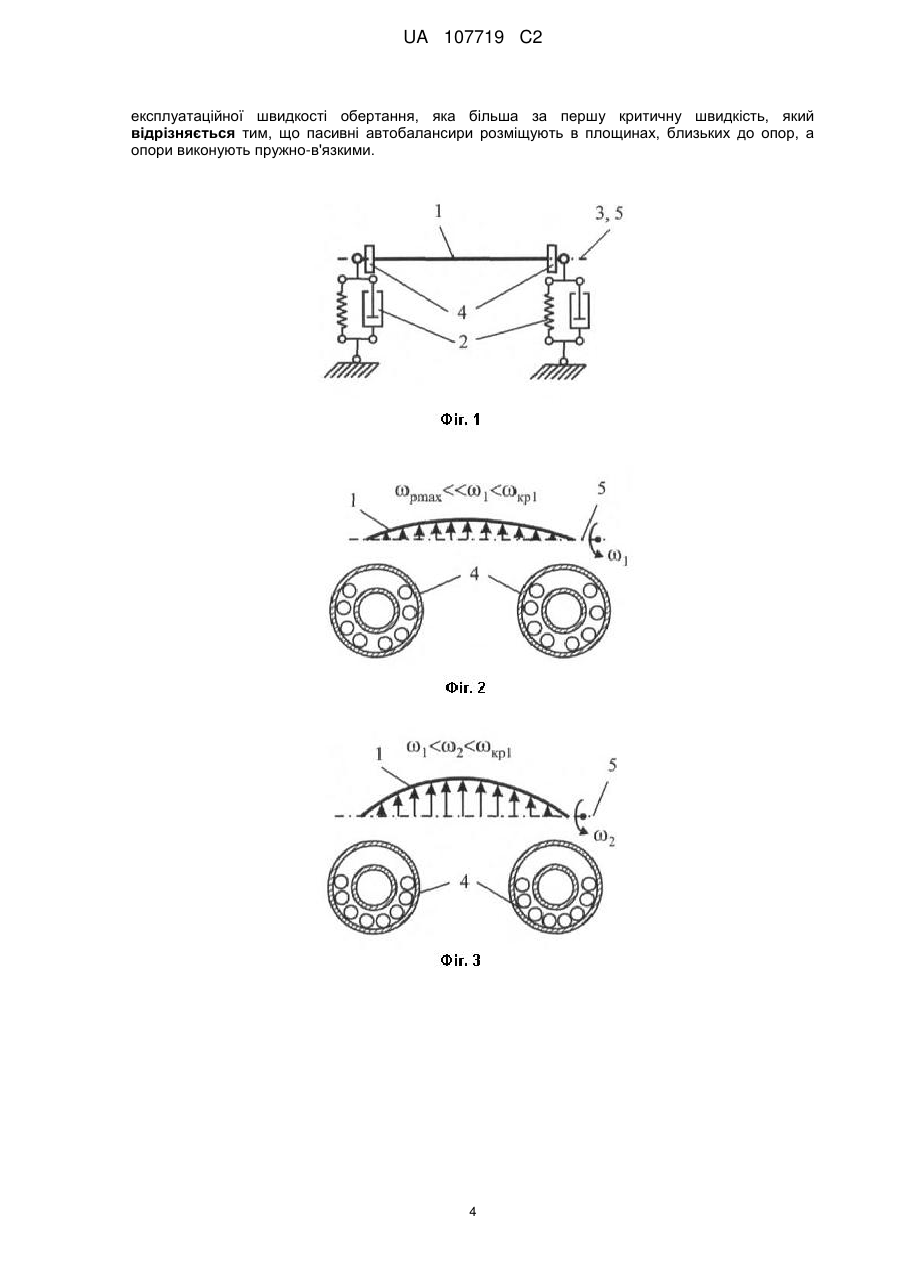
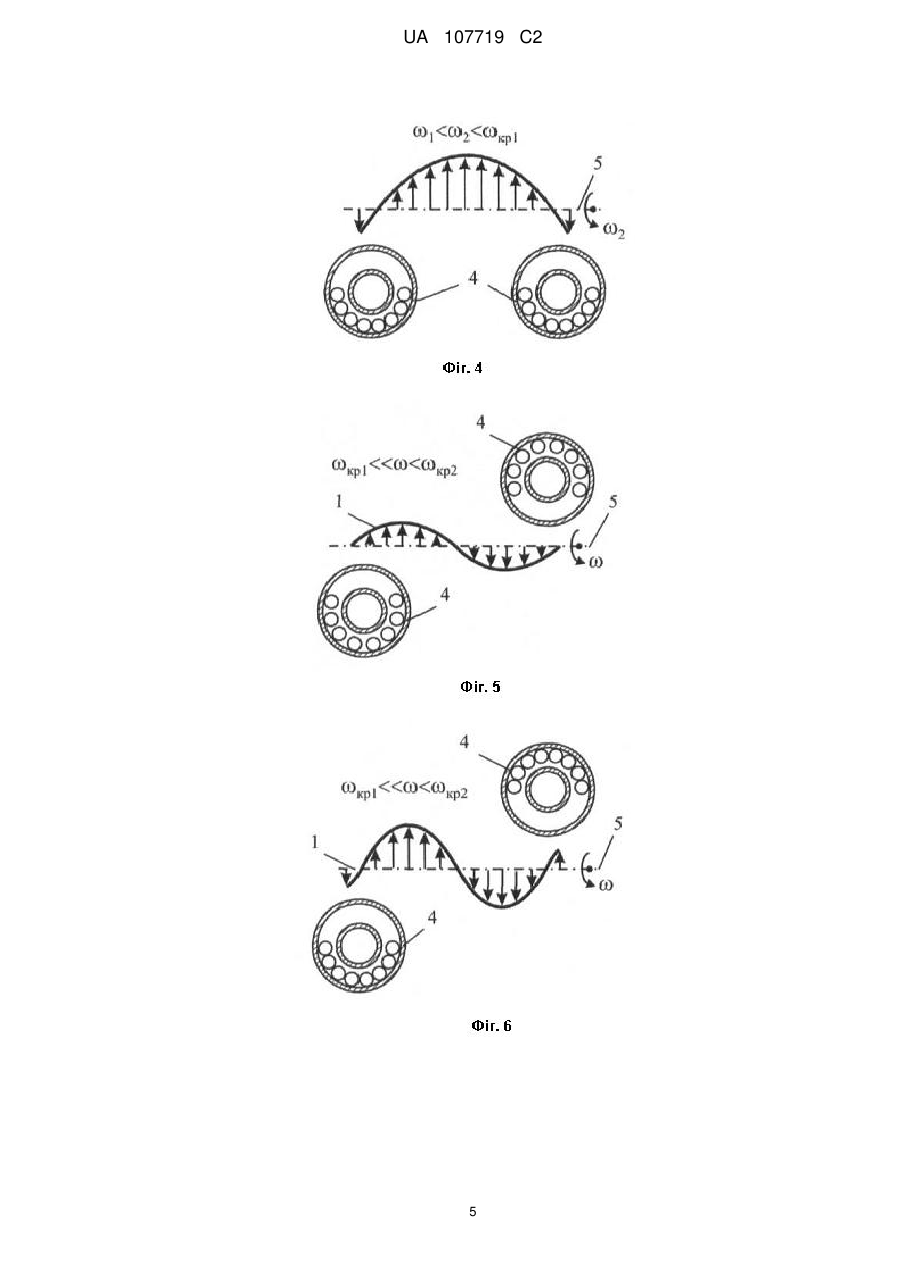
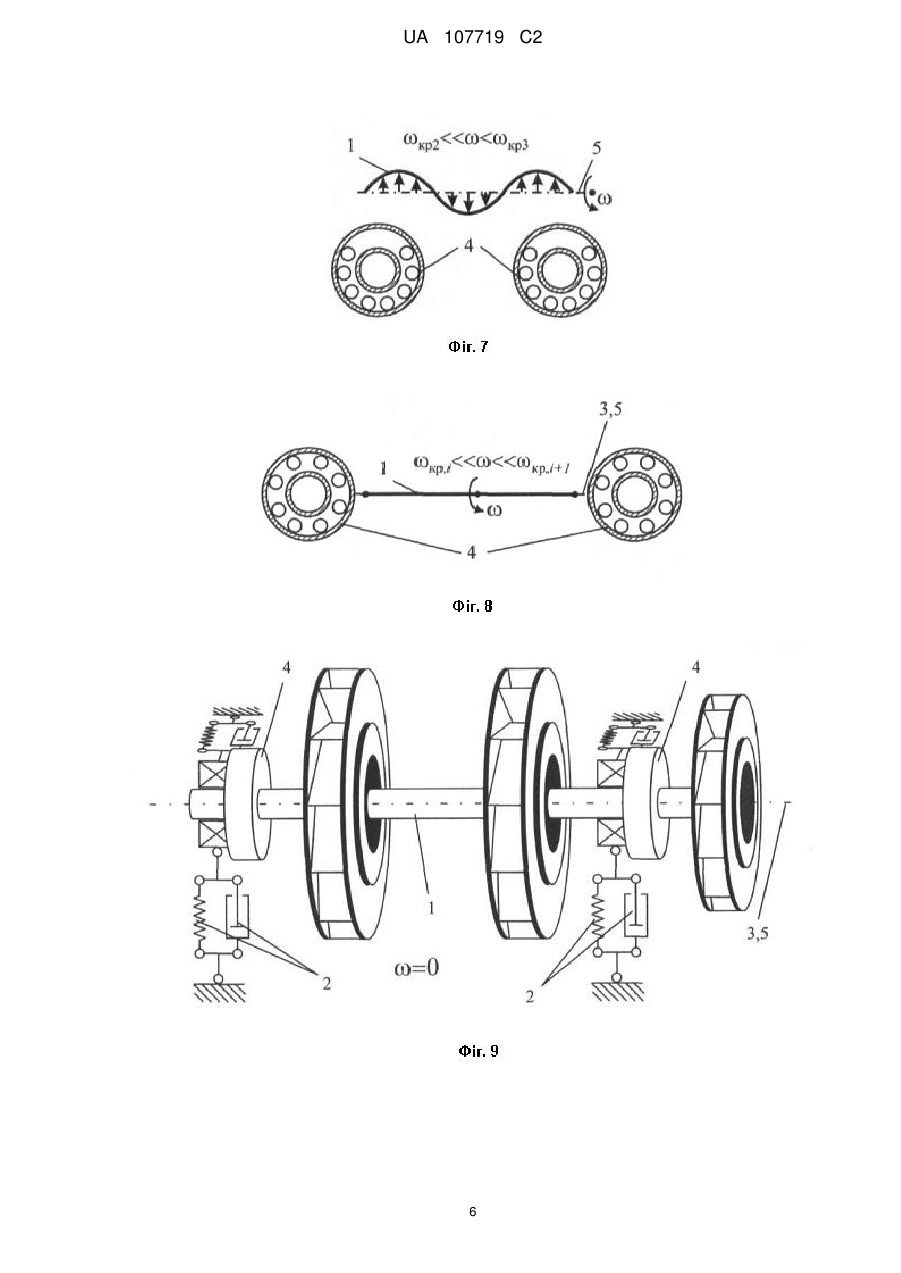
Реферат: Винахід може бути використаний при балансуванні на ходу в процесі експлуатації гнучких двоопорних роторів газотурбінних двигунів, турбоагрегатів для нафтової і газової промисловості тощо. Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами полягає у тому, що на гнучкий ротор, що встановлений на дві опори, співвісно поздовжній осі якого встановлюють пасивні автобалансири у кількості 2-х штук і гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну UA 107719 C2 (12) UA 107719 C2 швидкість, при цьому пасивні автобалансири розміщують в площинах, близьких до опор, а опори виконують пружно-в'язкими. Винахід дозволяє забезпечити можливість експлуатації гнучкого ротора з допустимим рівнем вібрації на будь-якій сталій швидкості обертання, більшій за першу критичну швидкість. UA 107719 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до машинобудування і може бути використаний при балансуванні на ходу, в процесі експлуатації гнучких двоопорних роторів газотурбінних двигунів, турбоагрегатів для нафтової і газової промисловості тощо. Найбільш близьким технічним рішенням, вибраним за прототип є відомий спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами (Філімоніхін Г.Б. Зрівноваження і віброзахист роторів автобалансирами з твердими коригувальними вантажами: Монографія. - Кіровоград: КНТУ, 2004. - 352 c.), який полягає у тому, що на гнучкий ротор, встановлений на дві опори, що є жорсткими, співвісно поздовжній осі гнучкого ротора встановлюють пасивні автобалансири будь-якого типу у кількості 2-х штук в вузлах 3-ої форми головних коливань гнучкого ротора і гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну швидкість і лежить в діапазоні між 2-ю і 3-ю критичними швидкостями. Тип пасивного автобалансира не має принципового значення. Це може бути однорядний кульовий чи роликовий автобалансир, дворядний кульовий чи роликовий автобалансир, маятниковий автобалансир, рідинний автобалансир тощо. Зокрема два автобалансири можуть бути різних типів і різної балансувальної ємності. Також гнучкий ротор може бути зрівноважений до початку експлуатації як жорсткий ротор на сталій експлуатаційній швидкості обертання, або як жорсткий ротор у трьох площинах корекції, або як гнучкий ротор у трьох і більше площинах корекції тощо. Основним недоліком відомого способу є те, що балансування гнучкого ротора пасивними автобалансирами відбувається тільки в діапазоні між 2-ю і 3-ю критичними швидкостями. Тому на інших швидкостях обертання гнучкого ротора (на яких балансування не відбувається) його вібрації виходять за допустимі. Додатковим недоліком відомого способу є те, що під час розгону чи вибігу гнучкого ротора перехід через критичні швидкості відбувається при значних навантаженнях на опори. Задача, яку вирішує винахід - забезпечення можливості експлуатації гнучкого ротора з допустимим рівнем вібрації на будь-якій сталій швидкості обертання, більшій за першу критичну, шляхом забезпечення балансування гнучкого ротора пасивними автобалансирами на будь-якій сталій швидкості обертання, більшій за першу критичну. Суть винаходу полягає у тому, що у способі балансування гнучкого двоопорного ротора пасивними автобалансирами, в якому на гнучкий ротор, встановлений на дві опори співвісно поздовжній осі гнучкого ротора, встановлюють пасивні автобалансири будь-якого типу в кількості 2-х штук і гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну швидкість, з метою забезпечення можливості експлуатації гнучкого ротора з допустимим рівнем вібрації на будь-якій сталій швидкості обертання, більшій за першу критичну, пасивні автобалансири розміщують в площинах, близьких до опор, а опори закріплюють пружно-в'язко. Як і у прототипі тип пасивного автобалансира не має принципового значення. Це може бути однорядний кульовий чи роликовий автобалансир, дворядний кульовий чи роликовий автобалансир, маятниковий автобалансир, рідинний автобалансир тощо. Зокрема два автобалансири можуть бути різних типів і різної балансувальної ємності. Також гнучкий ротор може бути зрівноважений до початку експлуатації як жорсткий ротор на сталій експлуатаційній швидкості обертання або як жорсткий ротор у трьох площинах корекції, або як гнучкий ротор у трьох і більше площинах корекції тощо. На фіг. 1-8 показано реалізацію способу балансування для гнучкого двоопорного ротора пасивними автобалансирами, де 1 - гнучкий двоопорний ротор - міжопорний, 2 -дві пружно-в'язкі опори, 3 - подовжня вісь гнучкого ротора, 4 - пасивні автобалансири будь-якого типу у кількості 2-х штук, 5 - вісь обертання ротора. На фіг. 2-8 показані форми зігнутої подовжньої осі ротора при обертанні ротора з зарезонансними швидкостями, дещо меншими за: першу критичну швидкість - фіг. 2-4; другу - фіг. 5-6; третю - фіг. 7. На фіг. 8 зображено подовжню вісь гнучкого ротора при обертанні зі швидкостями, що знаходяться між і-ою і (i+1)-ою критичними швидкостями на віддалі від них, або у випадку зрівноваженого ротора. На фіг. 9-10 показаний приклад реалізації способу для двоопорного ротора, що має як міжопорну, так і консольну частини. При цьому на фіг. 9 - ротор в нерухомому стані (=0), а на фіг. 10 - ротор обертається зі сталою швидкістю, більшою за першу критичну (>кр1). На фіг. 11-14 зображені пасивні автобалансири: фіг. 11 - однорядний кульовий чи роликовий, фіг. 12 - дворядний кульовий чи роликовий, фіг. 13 - маятниковий, фіг. 14 - рідинний. Приклади конкретного виконання. Приклад 1. Приклад реалізації способу балансування гнучкого двоопорного ротора пасивними автобалансирами показаний на фіг. 1-8. У способі (фіг. 1) гнучкий міжопорний ротор 1 встановлюють на дві пружно-в'язкі опори 2, співвісно поздовжній осі 3 гнучкого ротора 1 UA 107719 C2 5 10 15 20 25 30 35 40 45 50 55 встановлюють пасивні автобалансири 4 будь-якого типу у кількості 2-х штук, причому пасивні автобалансири 4 розміщують як можна ближче до опор 2. Потім гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну швидкість. Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами працює наступним чином. Відомо, що гнучкий двоопорний ротор на сталій швидкості обертання можна зрівноважити як жорсткий корегуванням мас у двох площинах корекції. Також відомо, що таке балансування за певних умов можуть забезпечити два пасивні автобалансири будь-якого типу, для чого їх необхідно встановити на ротор по одному у кожній площині корекції співвісно його поздовжній осі. Також відомо, що балансування у вигляді автоматичного зрівноваження гнучкого ротора двома автобалансирами може наставати тільки при обертанні ротора із сталою кутовою швидкістю. Оскільки у запропонованому способі на гнучкий ротор, встановлений на дві опори, співвісно його поздовжній осі встановлюють пасивні автобалансири будь-якого типу у кількості 2-х штук, гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, то виконуються необхідні умови, за яких можливо автоматично зрівноважити дисбаланс гнучкого ротора у двох площинах корекції цими пасивними автобалансирами. Оскільки у запропонованому способі стала експлуатаційна швидкість обертання ротора більша за першу критичну швидкість, то ротор поводиться як гнучкий. Відповідно до винаходу пасивні автобалансири розміщують в площинах близьких до опор, тому вони будуть зрівноважувати ротор у двох площинах корекції, що практично співпадають із площинами опор. Відомо, що пасивні автобалансири можуть здійснювати балансування тільки, якщо вони встановленні податливо, тобто якщо вони можуть переміщуватися разом з ротором під дією поперечних щодо ротора сил. Тому у винаході запропоновано опори закріплювати пружно-в'язко. При встановленні ротора на пружно-в'язкі опори у нього з'являються резонансні швидкості обертання, менші за першу критичну швидкість обертання ротора. Відомо, що при перевищенні резонансних швидкостей обертання ротора два пасивні автобалансири автоматично зрівноважують у своїх площинах корекції жорсткий ротор. Отже додатковим позитивним ефектом винаходу буде настання балансування на всьому діапазоні зарезонансних швидкостей обертання ротора, менших за першу критичну швидкість, на яких ротор поводиться як жорсткий. На фіг. 2 зображений гнучкий ротор при обертанні (навколо осі обертання 5) із сталою кутовою швидкістю 1, що більша за найбільшу резонансну кутову швидкість обертання жорсткого ротора на пружно-в'язких (податливих) опорах рmах і дещо менша за першу критичну швидкість кр1 (рmах
ДивитисяДодаткова інформація
Автори англійськоюFilimonikhin Hennadii Borysovych, Panenko Vadym Hryhorovych
Автори російськоюФилимонихин Геннадий Борисович, Паненко Вадим Григорьевич
МПК / Мітки
МПК: G01M 1/32
Мітки: ротора, спосіб, гнучкого, двоопорного, пасивними, балансування, автобалансирами
Код посилання
<a href="https://ua.patents.su/10-107719-sposib-balansuvannya-gnuchkogo-dvoopornogo-rotora-pasivnimi-avtobalansirami.html" target="_blank" rel="follow" title="База патентів України">Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами</a>
Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами
Номер патенту: 78898
Опубліковано: 10.04.2013
Автори: Паненко Вадим Григорович, Гадяка Володимир Григорович, Філімоніхін Геннадій Борисович, Гончаров Валерій Володимирович
Мітки: ротора, двоопорного, автобалансирами, балансування, спосіб, пасивними, гнучкого
Формула / Реферат:
Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами, який полягає у тому, що на гнучкий ротор, встановлений на дві опори, співвісно поздовжній осі гнучкого ротора встановлюють пасивні автобалансири будь-якого типу, у кількості 2-х штук, і гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну швидкість, який відрізняється тим, що пасивні автобалансири розміщують в площинах,...
Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами
Номер патенту: 74641
Опубліковано: 12.11.2012
Автори: Гончаров Валерій Володимирович, Олійніченко Любов Сергіївна, Філімоніхін Геннадій Борисович
МПК: F04D 29/66, G01M 1/32
Мітки: балансування, спосіб, пасивними, автобалансирами, ротора, жорсткого, динамічного
Формула / Реферат:
Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами, який полягає у тому, що на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але є меншою за першу критичну швидкість обертання гнучкого ротора, який відрізняється тим, що ротор встановлюють у корпусі так, що...
Спосіб автоматичного балансування ротора та пристрій для його здійснення
Номер патенту: 107556
Опубліковано: 12.01.2015
Автор: Горбенко Олександр Миколайович
МПК: F16F 15/36, G01M 1/36, G01M 1/38, G01M 1/18
Мітки: здійснення, пристрій, спосіб, автоматичного, ротора, балансування
Формула / Реферат:
1. Спосіб автоматичного балансування ротора, що полягає в тому, що на роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира, причому при нерухомому роторі компенсуючі вантажі зафіксовані відносно ротора, який відрізняється тим, що для автоматичного балансування ротора, що обертається із сталою частотою обертання, створюють керуючий силовий вплив на ротор...
Спосіб балансування ротора машини по нестабільній амплітуді вібраціії
Номер патенту: 30640
Опубліковано: 11.03.2008
Автори: Романов Віктор Олександрович, Лісовий Георгій Миколайович, Вишневський Володимир Мирославович
МПК: G01B 5/00
Мітки: амплітуди, нестабільній, ротора, машини, вібраціії, спосіб, балансування
Формула / Реферат:
Спосіб балансування ротора машини по нестабільній амплітуді вібрації, при якому виконують вимірювання параметрів вібрації машини в початковому стані, а потім при закріпленні коректувальної маси, з однаковим дисбалансом одне в вільно вибране місце і два по колу з кутом на 120° і 240° від нього, та по їх параметрах знаходять місце знаходження і розмір зрівноважуючої маси, який відрізняється тим, що виміряють максимальні і мінімальні значення...
Спосіб визначення допустимого залишкового дисбалансу ротора тягового електродвигуна безкорпусного виконання
Номер патенту: 28461
Опубліковано: 10.12.2007
Автори: Ковальов Олександр Юхимович, Карпенко Володимир Владиславович
МПК: G01M 7/00
Мітки: спосіб, дисбалансу, допустимого, безкорпусного, визначення, виконання, залишкового, електродвигуна, тягового, ротора
Формула / Реферат:
Спосіб визначення допустимого залишкового дисбалансу ротора тягового електродвигуна (ТЕД) безкорпусного виконання, який включає встановлення класу точності балансування ротора ТЕД безкорпусного виконання, а також виконання вимог до балансування і методів розрахунку дисбалансів за державним стандартом, що і для ротора ТЕД корпусного виконання, який відрізняється тим, що клас точності балансування ротора ТЕД безкорпусного виконання вибирають на...
Попередній патент: Система подачі нев’язкого полімерного розчину на основі простагландину, який не містить консерванта
Наступний патент: Синергічна гербіцидна композиція, яка містить піроксулам і сульфосульфурон
Випадковий патент: Спосіб рафінування сталі в проміжних розливних ковшах