Спосіб автоматичного балансування ротора та пристрій для його здійснення
Формула / Реферат
1. Спосіб автоматичного балансування ротора, що полягає в тому, що на роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира, причому при нерухомому роторі компенсуючі вантажі зафіксовані відносно ротора, який відрізняється тим, що для автоматичного балансування ротора, що обертається із сталою частотою обертання, створюють керуючий силовий вплив на ротор у вигляді примусової стрибкоподібної зміни миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення, за допомогою притискного механізму автобалансира в результаті дії моменту сил інерції обертання, що виникає при стрибкоподібній зміні миттєвої швидкості обертання, звільняють компенсуючі вантажі і здійснюють таким чином процес автобалансування ротора, потім після закінчення процесу автобалансування ротора знову створюють керуючий силовий вплив на ротор у вигляді примусової стрибкоподібної зміни миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення, у результаті чого притискним механізмом автобалансира фіксують компенсуючі вантажі відносно ротора.
2. Спосіб автоматичного балансування ротора за п. 1, який відрізняється тим, що керуючий силовий вплив на ротор створюють у вигляді примусового стрибкоподібного збільшення або зменшення миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення.
3. Пристрій для автоматичного балансування ротора, що містить корпус, жорстко встановлений на роторі, кільцеву камеру, виконану коаксіально осі ротора, в якій вільно розміщені компенсуючі вантажі у вигляді тіл кочення, і притискний механізм для звільнення та фіксації компенсуючих вантажів відносно ротора, який відрізняється тим, що притискний механізм містить керуючий інерційний диск, встановлений з можливістю прокручування навколо осі ротора з одночасним осьовим зсувом, пружину, яка віджимає інерційний диск в осьовому напрямку від компенсуючих вантажів, і храповий механізм, виконаний з можливістю переривчастого односпрямованого прокручування інерційного диска навколо осі ротора під дією моменту сил інерції обертання, який виникає при стрибкоподібній зміні миттєвої швидкості обертання ротора, при цьому храповий механізм складається з кільцевого бурту, нерухомого щодо ротора, з впадинами в осьовому напрямку та фіксаторів у кількості не менше двох, вісесиметрично встановлених в інерційному диску і притиснутих до впадин бурту пружинами в осьовому напрямку, причому впадини на бурті виконані несиметрично зі скосом і неоднакової глибини в осьовому напрямку, крім того впадини чергуються великої та малої глибини і розташовані вісесиметрично по окружності бурта, при цьому в положенні, при якому фіксатори знаходяться в малих впадинах, інерційний диск зсунутий в осьовому напрямку в бік компенсуючих вантажів і притискає вантажі до внутрішньої торцевої стінки корпусу автобалансира, фіксуючи їх положення відносно ротора, а у положенні, при якому фіксатори знаходяться у великих впадинах, інерційний диск віджатий пружиною диска в осьовому напрямку в бік від компенсуючих вантажів, забезпечуючи свободу переміщення вантажів по кільцевій камері автобалансира.
4. Пристрій для автоматичного балансування ротора за п. 3, який відрізняється тим, що впадини на бурті храпового механізму виконані несиметрично зі скосом в напрямку обертання ротора або в напрямку, протилежному до обертання ротора, за рахунок чого храповий механізм забезпечує можливість переривчастого односпрямованого прокручування інерційного диска в сторону обертання ротора або в сторону, протилежну обертанню ротора, під дією моменту сил інерції обертання, який виникає при стрибкоподібному, відповідно зменшенні або збільшенні миттєвої швидкості обертання ротора.
Текст
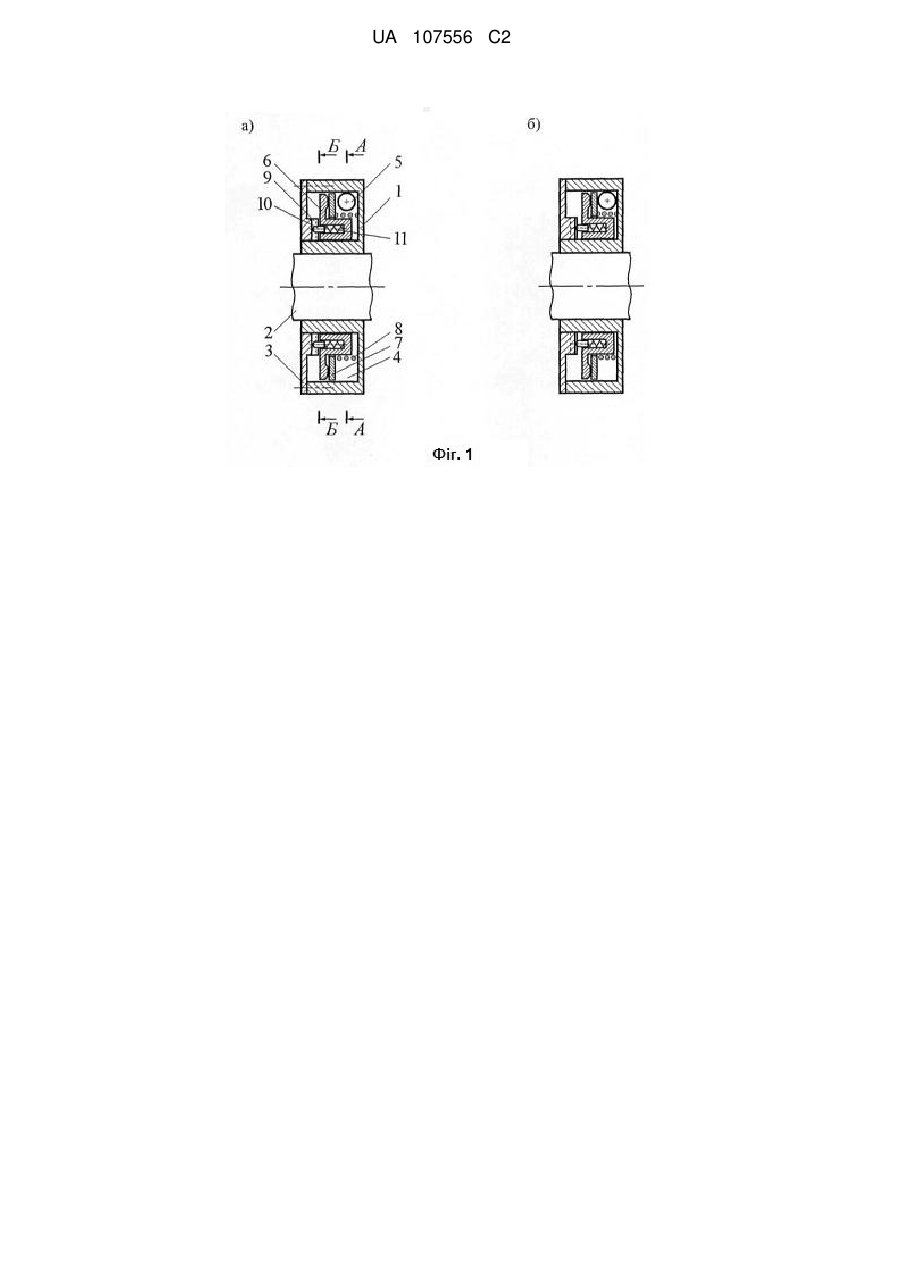
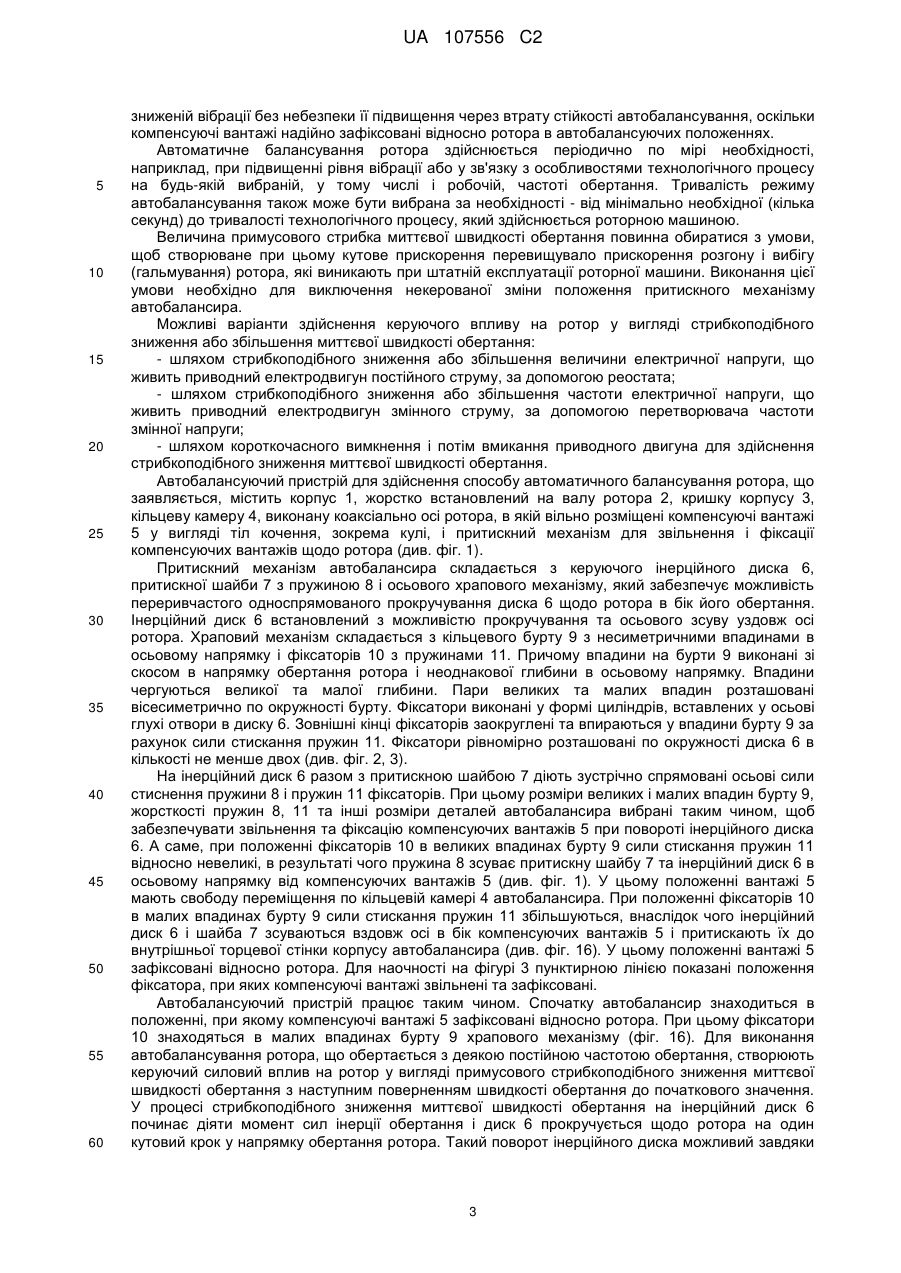
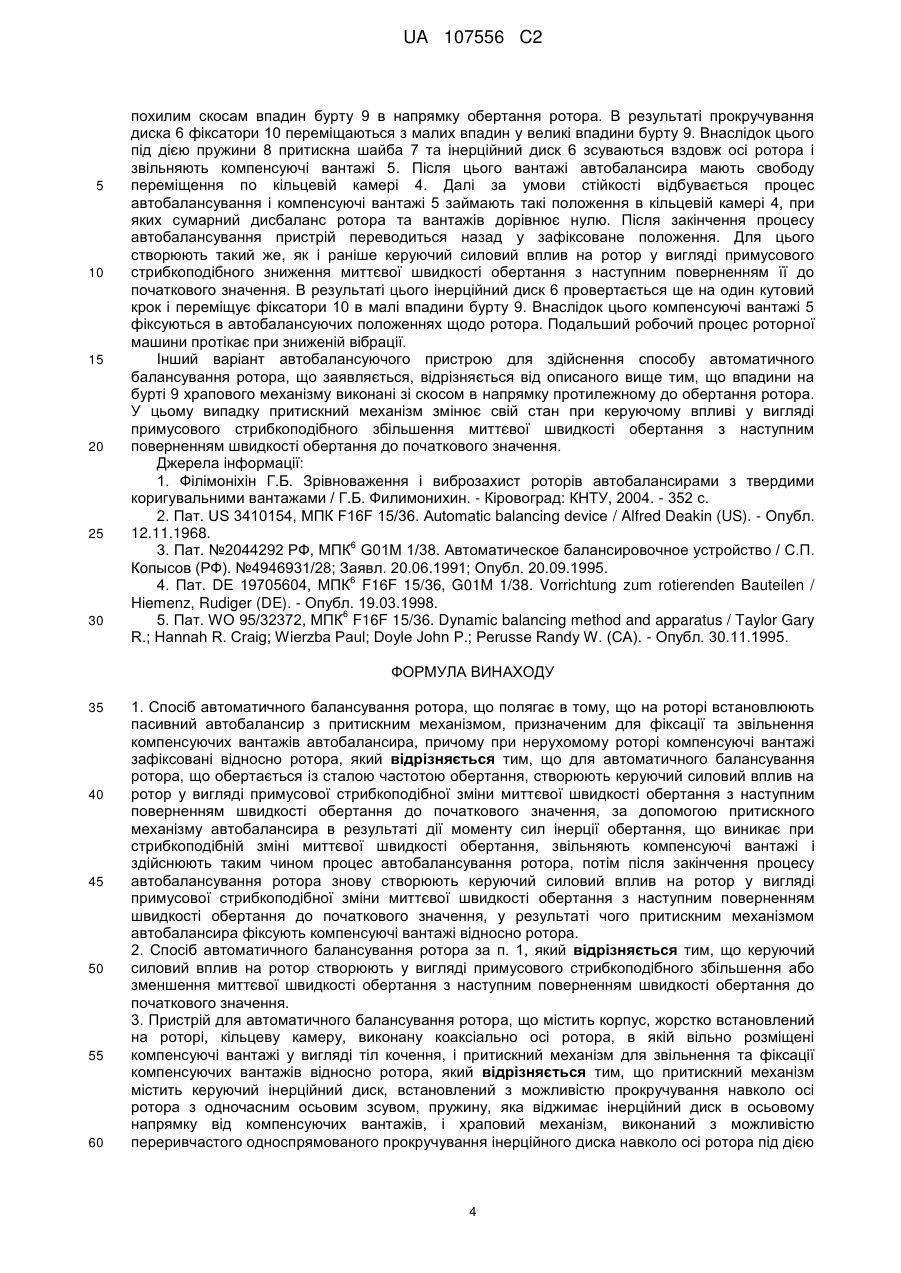
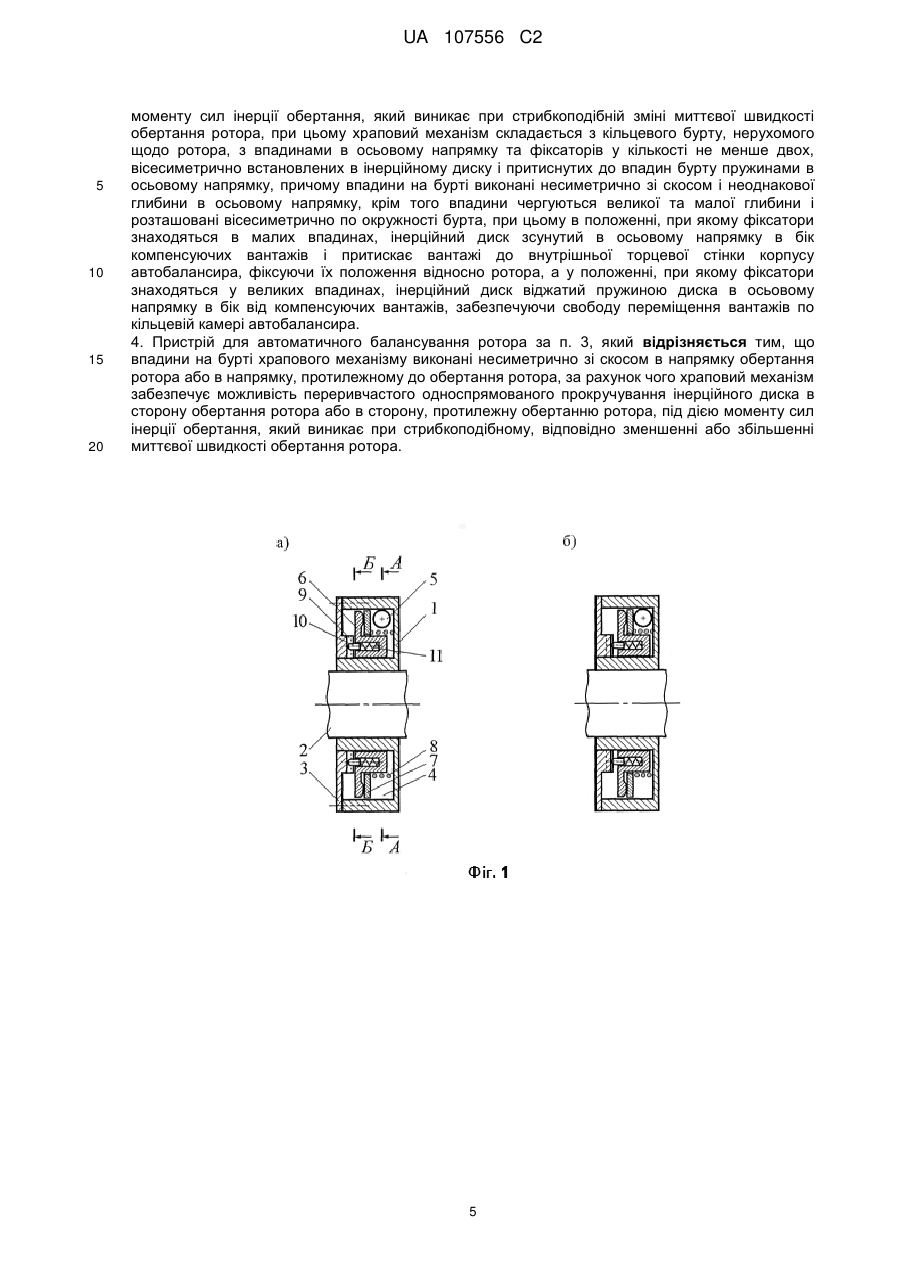
Реферат: Група винаходів належить до загального машинобудування. Спосіб автоматичного балансування ротора полягає в тому, що на роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира. Для автоматичного балансування ротора створюють керуючий силовий вплив на ротор у вигляді примусової стрибкоподібної зміни миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення. За допомогою притискного механізму автобалансира звільняють компенсуючі вантажі і здійснюють таким чином процес автобалансування. Після закінчення такого процесу знову створюють керуючий силовий вплив на ротор у вигляді примусової стрибкоподібної зміни миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення, у результаті чого притискним механізмом автобалансира фіксують компенсуючі вантажі відносно ротора. Передбачений також пристрій для автоматичного балансування. Технічним результатом є періодичне автоматичне балансування ротора безпосередньо на робочій частоті обертання при одночасному виключенні небезпеки розбалансування ротора і підвищення вібрації роторної машини. UA 107556 C2 (12) UA 107556 C2 UA 107556 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до машинобудування і може бути використаний для балансування роторів на ходу. Відомі спосіб та пристрої для автоматичного балансування неврівноваженого ротора шляхом установки на ротор автобалансира пасивного типу [1]. Такі автобалансуючі пристрої узагальнено являють собою набір компенсуючих вантажів, які приєднані до обертового ротора та мають можливість вільно переміщуватися відносно нього. Як правило, але не виключно, вантажі мають можливість вільно переміщатися по окружності з центром на осі ротора в площині, перпендикулярній до цієї осі. При певних значеннях частоти обертання та параметрів механічної системи компенсуючі вантажі займають такі стійкі положення щодо ротора, при яких сумарний дисбаланс вантажів та ротора дорівнює нулю. Недоліком такого способу автоматичного балансування ротора та пристроїв для його реалізації є те, що вони здатні ефективно працювати тільки в одному або в декількох строго певних діапазонах частот обертання ротора. При цьому автобалансування завжди нестійке при частотах обертання в діапазоні від нуля до нижчої критичної частоти обертання, що обмежує область можливого застосування такого способу та пристроїв для автоматичного балансування ротора. Іншим недоліком є те, що навіть в режимі автобалансування компенсуючі вантажі здійснюють коливання відносно ротора. Тому неминучі зовнішні впливи, такі як вібрація, поштовхи та удари, здатні порушити стійкість автобалансуючого руху механічної системи. Відомі спосіб та пристрої для автоматичного балансування неврівноваженого ротора шляхом установки на ротор автобалансира пасивного типу з додатковим притискним механізмом [2-4]. В залежності від значення сталої частоти обертання ротора притискний механізм або забезпечує нерухомість компенсуючих вантажів щодо ротора, або звільняє їх, надаючи можливість компенсуючим вантажам зайняти автобалансуючі положення щодо ротора. При цьому перехід притискного механізму з одного положення в інше положення відбувається в результаті дії радіальних сил інерції, величина яких залежить від значення сталої швидкості обертання ротора. Такий спосіб автоматичного балансування забезпечує спокійний розгін і гальмування ротора без підвищеної вібрації через розбалансування ротора на докритичних частотах обертання внаслідок втрати стійкості автобалансування. Загальним недоліком даного способу та пристроїв для автоматичного балансування ротора є те, що управління положенням притискного механізму автобалансира здійснюється шляхом зміни середнього значення сталої частоти обертання ротора. На основному експлуатаційному режимі роботи роторної машини притискний механізм автобалансира знаходиться у відкритому положенні. Тому можлива втрата стійкості автобалансуючих положень компенсуючих вантажів через вплив зовнішніх випадкових силових факторів з подальшим розбалансуванням ротора та підвищенням вібрації. Іншим недоліком є необхідність додаткової спеціальної процедури примусового виведення ротора на неробочу частоту обертання у випадку, якщо для автоматичного балансування передбачається окремий діапазон частот обертання поза робочого режиму роторної машини. За сукупністю ознак спосіб та пристрій для автоматичного балансування неврівноваженого ротора, які розкриті у винаході [5], є найближчим аналогом винаходу, що заявляється. Конкретніше спосіб розкритий в пунктах 23 і 31, а пристрій розкрито в пунктах 17, 19, 20 і 30 формули винаходу [5]. Спосіб автоматичного балансування ротора полягає в тому, що на роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира. Після розгону ротора до деякої попередньо встановленої частоти обертання притискний механізм звільняє компенсуючі вантажі автобалансира та відбувається процес автобалансування. При зниженні частоти обертання відбувається фіксація компенсуючих вантажів щодо ротора. Притискний механізм автобалансуючого пристрою управляється радіальними відцентровими силами, що діють на керуючі тіла при обертанні ротора. Таким чином, притискний механізм автобалансира реагує на середнє значення сталої частоти обертання. Недоліком найближчого аналога способу автоматичного балансування ротора та пристроїв для його реалізації є те, що при роботі роторної машини на робочій частоті обертання притискний механізм автобалансира постійно перебуває в положенні, при якому компенсуючі вантажі звільнені та здійснюють коливання відносно ротора. Тому неминучі зовнішні впливи, що діють на роторну машину, такі як вібрація, поштовхи та удари, здатні порушити стійкість автобалансуючого руху механічної системи, що призведе до розбалансування ротора та підвищення вібрації. Можливе також альтернативне використання даного способу, при якому для автоматичного балансування ротора передбачається окремий діапазон частот обертання поза робочої частоти обертання. Недоліком такого способу є знижена точність автоматичного балансування в разі, 1 UA 107556 C2 5 10 15 20 25 30 35 40 45 50 55 якщо спосіб застосовується для гнучкого ротора, оскільки величина та напрямок дисбалансу такого ротора залежать від частоти обертання. Тому гнучкий ротор, збалансований на деякій частоті обертання, стає незбалансованим після його переведення на робочу частоту обертання. Іншим недоліком такого способу автоматичного балансування є необхідність додаткової спеціальної процедури примусового виведення ротора на неробочу частоту обертання, що можливо далеко не у всіх роторних машинах. Технічна задача, на вирішення якої направлений винахід, полягає в тому, щоб забезпечити можливість періодичного, по мірі необхідності, автоматичного балансування ротора безпосередньо на робочій частоті обертання при одночасному виключенні небезпеки розбалансування ротора та підвищення вібрації роторної машини протягом основного експлуатаційного часу її роботи внаслідок втрати стійкості автобалансування. Задача вирішується тим, що за заявленим способом на роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира, причому в початковому положенні вантажі зафіксовані відносно ротора. Для автоматичного балансування ротора на робочій або іншій частоті обертання притискний механізм автобалансира примусово переводиться в положення, при якому компенсуючі вантажі звільнені, після чого відбувається автобалансування. Потім притискний механізм автобалансира примусово переводиться в фіксуюче положення, в результаті чого виключається небезпека втрати стійкості автобалансуючих положень вантажів на основному робочому режимі роторної машини. При цьому згідно із заявленим способом переведення притискного механізму автобалансира з одного положення в інше здійснюється шляхом примусового стрибкоподібного зменшення, або збільшення миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення. У результаті такого керуючого впливу створюється досить велике кутове прискорення і момент сил інерції обертання, діючий на керуючі деталі притискного механізму. Таким чином, притискний механізм реагує на кутове прискорення обертання ротора, а не на швидкість обертання, і автоматичне балансування може здійснюватися по мірі необхідності на будь-якій вибраній, в тому числі і робочій, частоті обертання, на відміну від найближчого аналога. Задача вирішується також тим, що автобалансуючий пристрій містить притискний механізм, конструкція якого забезпечує зміну його положення в результаті керуючого силового впливу на нього у вигляді примусового стрибкоподібного зменшення або збільшення миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення. Притискний механізм пристрою, який заявляється, реагує на кутове прискорення обертання ротора, а не на швидкість обертання. Це і відрізняє даний пристрій від найближчих аналогів, які реагують на середнє значення усталеної частоти обертання. Автобалансуючий пристрій по способу автоматичного балансування ротора, що заявляється, показано на фігурах: на фіг. 1а показано автобалансуючий пристрій у положенні, при якому компенсуючі вантажі звільнені; на фіг. 1б показано автобалансуючий пристрій у положенні, при якому компенсуючі вантажі зафіксовані; на фіг. 2 показані поперечні перерізи А-А і Б-Б автобалансуючого пристрою; на фіг. 3 показана кришка автобалансуючого пристрою з кільцевим буртом храпового механізму, вид збоку. Спосіб автоматичного балансування ротора здійснюється наступним чином. На роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира, причому при нерухомому роторі компенсуючі вантажі зафіксовані відносно ротора. Для автоматичного балансування ротора на робочій або іншій вибраній усталеній частоті обертання створюють керуючий силовий вплив на ротор у вигляді примусового стрибкоподібного зниження або збільшення миттєвої швидкості обертання з наступним поверненням її до початкового значення. У результаті такого керуючого впливу створюється досить велике кутове прискорення і момент сил інерції обертання, який діє на керуючі деталі притискного механізму. Під дією моменту сил інерції обертання притискний механізм автобалансира звільняє компенсуючі вантажі та відбувається процес автобалансування ротора. Потім по закінченні процесу автобалансування знову створюють керуючий силовий вплив на ротор у вигляді примусового стрибкоподібного зниження або збільшення миттєвої швидкості обертання з наступним поверненням її до початкового значення. У результаті цього притискний механізм автобалансира фіксує компенсуючі вантажі відносно ротора. Подальша експлуатація роторної машини на робочому режимі відбувається при 2 UA 107556 C2 5 10 15 20 25 30 35 40 45 50 55 60 зниженій вібрації без небезпеки її підвищення через втрату стійкості автобалансування, оскільки компенсуючі вантажі надійно зафіксовані відносно ротора в автобалансуючих положеннях. Автоматичне балансування ротора здійснюється періодично по мірі необхідності, наприклад, при підвищенні рівня вібрації або у зв'язку з особливостями технологічного процесу на будь-якій вибраній, у тому числі і робочій, частоті обертання. Тривалість режиму автобалансування також може бути вибрана за необхідності - від мінімально необхідної (кілька секунд) до тривалості технологічного процесу, який здійснюється роторною машиною. Величина примусового стрибка миттєвої швидкості обертання повинна обиратися з умови, щоб створюване при цьому кутове прискорення перевищувало прискорення розгону і вибігу (гальмування) ротора, які виникають при штатній експлуатації роторної машини. Виконання цієї умови необхідно для виключення некерованої зміни положення притискного механізму автобалансира. Можливі варіанти здійснення керуючого впливу на ротор у вигляді стрибкоподібного зниження або збільшення миттєвої швидкості обертання: - шляхом стрибкоподібного зниження або збільшення величини електричної напруги, що живить приводний електродвигун постійного струму, за допомогою реостата; - шляхом стрибкоподібного зниження або збільшення частоти електричної напруги, що живить приводний електродвигун змінного струму, за допомогою перетворювача частоти змінної напруги; - шляхом короткочасного вимкнення і потім вмикання приводного двигуна для здійснення стрибкоподібного зниження миттєвої швидкості обертання. Автобалансуючий пристрій для здійснення способу автоматичного балансування ротора, що заявляється, містить корпус 1, жорстко встановлений на валу ротора 2, кришку корпусу 3, кільцеву камеру 4, виконану коаксіально осі ротора, в якій вільно розміщені компенсуючі вантажі 5 у вигляді тіл кочення, зокрема кулі, і притискний механізм для звільнення і фіксації компенсуючих вантажів щодо ротора (див. фіг. 1). Притискний механізм автобалансира складається з керуючого інерційного диска 6, притискної шайби 7 з пружиною 8 і осьового храпового механізму, який забезпечує можливість переривчастого односпрямованого прокручування диска 6 щодо ротора в бік його обертання. Інерційний диск 6 встановлений з можливістю прокручування та осьового зсуву уздовж осі ротора. Храповий механізм складається з кільцевого бурту 9 з несиметричними впадинами в осьовому напрямку і фіксаторів 10 з пружинами 11. Причому впадини на бурти 9 виконані зі скосом в напрямку обертання ротора і неоднакової глибини в осьовому напрямку. Впадини чергуються великої та малої глибини. Пари великих та малих впадин розташовані вісесиметрично по окружності бурту. Фіксатори виконані у формі циліндрів, вставлених у осьові глухі отвори в диску 6. Зовнішні кінці фіксаторів заокруглені та впираються у впадини бурту 9 за рахунок сили стискання пружин 11. Фіксатори рівномірно розташовані по окружності диска 6 в кількості не менше двох (див. фіг. 2, 3). На інерційний диск 6 разом з притискною шайбою 7 діють зустрічно спрямовані осьові сили стиснення пружини 8 і пружин 11 фіксаторів. При цьому розміри великих і малих впадин бурту 9, жорсткості пружин 8, 11 та інші розміри деталей автобалансира вибрані таким чином, щоб забезпечувати звільнення та фіксацію компенсуючих вантажів 5 при повороті інерційного диска 6. А саме, при положенні фіксаторів 10 в великих впадинах бурту 9 сили стискання пружин 11 відносно невеликі, в результаті чого пружина 8 зсуває притискну шайбу 7 та інерційний диск 6 в осьовому напрямку від компенсуючих вантажів 5 (див. фіг. 1). У цьому положенні вантажі 5 мають свободу переміщення по кільцевій камері 4 автобалансира. При положенні фіксаторів 10 в малих впадинах бурту 9 сили стискання пружин 11 збільшуються, внаслідок чого інерційний диск 6 і шайба 7 зсуваються вздовж осі в бік компенсуючих вантажів 5 і притискають їх до внутрішньої торцевої стінки корпусу автобалансира (див. фіг. 16). У цьому положенні вантажі 5 зафіксовані відносно ротора. Для наочності на фігурі 3 пунктирною лінією показані положення фіксатора, при яких компенсуючі вантажі звільнені та зафіксовані. Автобалансуючий пристрій працює таким чином. Спочатку автобалансир знаходиться в положенні, при якому компенсуючі вантажі 5 зафіксовані відносно ротора. При цьому фіксатори 10 знаходяться в малих впадинах бурту 9 храпового механізму (фіг. 16). Для виконання автобалансування ротора, що обертається з деякою постійною частотою обертання, створюють керуючий силовий вплив на ротор у вигляді примусового стрибкоподібного зниження миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення. У процесі стрибкоподібного зниження миттєвої швидкості обертання на інерційний диск 6 починає діяти момент сил інерції обертання і диск 6 прокручується щодо ротора на один кутовий крок у напрямку обертання ротора. Такий поворот інерційного диска можливий завдяки 3 UA 107556 C2 5 10 15 20 25 30 похилим скосам впадин бурту 9 в напрямку обертання ротора. В результаті прокручування диска 6 фіксатори 10 переміщаються з малих впадин у великі впадини бурту 9. Внаслідок цього під дією пружини 8 притискна шайба 7 та інерційний диск 6 зсуваються вздовж осі ротора і звільняють компенсуючі вантажі 5. Після цього вантажі автобалансира мають свободу переміщення по кільцевій камері 4. Далі за умови стійкості відбувається процес автобалансування і компенсуючі вантажі 5 займають такі положення в кільцевій камері 4, при яких сумарний дисбаланс ротора та вантажів дорівнює нулю. Після закінчення процесу автобалансування пристрій переводиться назад у зафіксоване положення. Для цього створюють такий же, як і раніше керуючий силовий вплив на ротор у вигляді примусового стрибкоподібного зниження миттєвої швидкості обертання з наступним поверненням її до початкового значення. В результаті цього інерційний диск 6 провертається ще на один кутовий крок і переміщує фіксатори 10 в малі впадини бурту 9. Внаслідок цього компенсуючі вантажі 5 фіксуються в автобалансуючих положеннях щодо ротора. Подальший робочий процес роторної машини протікає при зниженій вібрації. Інший варіант автобалансуючого пристрою для здійснення способу автоматичного балансування ротора, що заявляється, відрізняється від описаного вище тим, що впадини на бурті 9 храпового механізму виконані зі скосом в напрямку протилежному до обертання ротора. У цьому випадку притискний механізм змінює свій стан при керуючому впливі у вигляді примусового стрибкоподібного збільшення миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення. Джерела інформації: 1. Філімоніхін Г.Б. Зрівноваження і виброзахист роторів автобалансирами з твердими коригувальними вантажами / Г.Б. Филимонихин. - Кіровоград: КНТУ, 2004. - 352 с. 2. Пат. US 3410154, МПК F16F 15/36. Automatic balancing device / Alfred Deakin (US). - Опубл. 12.11.1968. 6 3. Пат. №2044292 РФ, МПК G01М 1/38. Автоматическое балансировочное устройство / С.П. Копысов (РФ). №4946931/28; Заявл. 20.06.1991; Опубл. 20.09.1995. 6 4. Пат. DE 19705604, МПК F16F 15/36, G01M 1/38. Vorrichtung zum rotierenden Bauteilen / Hiemenz, Rudiger (DE). - Опубл. 19.03.1998. 6 5. Пат. WO 95/32372, МПК F16F 15/36. Dynamic balancing method and apparatus / Taylor Gary R.; Hannah R. Craig; Wierzba Paul; Doyle John P.; Perusse Randy W. (СА). - Опубл. 30.11.1995. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 60 1. Спосіб автоматичного балансування ротора, що полягає в тому, що на роторі встановлюють пасивний автобалансир з притискним механізмом, призначеним для фіксації та звільнення компенсуючих вантажів автобалансира, причому при нерухомому роторі компенсуючі вантажі зафіксовані відносно ротора, який відрізняється тим, що для автоматичного балансування ротора, що обертається із сталою частотою обертання, створюють керуючий силовий вплив на ротор у вигляді примусової стрибкоподібної зміни миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення, за допомогою притискного механізму автобалансира в результаті дії моменту сил інерції обертання, що виникає при стрибкоподібній зміні миттєвої швидкості обертання, звільняють компенсуючі вантажі і здійснюють таким чином процес автобалансування ротора, потім після закінчення процесу автобалансування ротора знову створюють керуючий силовий вплив на ротор у вигляді примусової стрибкоподібної зміни миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення, у результаті чого притискним механізмом автобалансира фіксують компенсуючі вантажі відносно ротора. 2. Спосіб автоматичного балансування ротора за п. 1, який відрізняється тим, що керуючий силовий вплив на ротор створюють у вигляді примусового стрибкоподібного збільшення або зменшення миттєвої швидкості обертання з наступним поверненням швидкості обертання до початкового значення. 3. Пристрій для автоматичного балансування ротора, що містить корпус, жорстко встановлений на роторі, кільцеву камеру, виконану коаксіально осі ротора, в якій вільно розміщені компенсуючі вантажі у вигляді тіл кочення, і притискний механізм для звільнення та фіксації компенсуючих вантажів відносно ротора, який відрізняється тим, що притискний механізм містить керуючий інерційний диск, встановлений з можливістю прокручування навколо осі ротора з одночасним осьовим зсувом, пружину, яка віджимає інерційний диск в осьовому напрямку від компенсуючих вантажів, і храповий механізм, виконаний з можливістю переривчастого односпрямованого прокручування інерційного диска навколо осі ротора під дією 4 UA 107556 C2 5 10 15 20 моменту сил інерції обертання, який виникає при стрибкоподібній зміні миттєвої швидкості обертання ротора, при цьому храповий механізм складається з кільцевого бурту, нерухомого щодо ротора, з впадинами в осьовому напрямку та фіксаторів у кількості не менше двох, вісесиметрично встановлених в інерційному диску і притиснутих до впадин бурту пружинами в осьовому напрямку, причому впадини на бурті виконані несиметрично зі скосом і неоднакової глибини в осьовому напрямку, крім того впадини чергуються великої та малої глибини і розташовані вісесиметрично по окружності бурта, при цьому в положенні, при якому фіксатори знаходяться в малих впадинах, інерційний диск зсунутий в осьовому напрямку в бік компенсуючих вантажів і притискає вантажі до внутрішньої торцевої стінки корпусу автобалансира, фіксуючи їх положення відносно ротора, а у положенні, при якому фіксатори знаходяться у великих впадинах, інерційний диск віджатий пружиною диска в осьовому напрямку в бік від компенсуючих вантажів, забезпечуючи свободу переміщення вантажів по кільцевій камері автобалансира. 4. Пристрій для автоматичного балансування ротора за п. 3, який відрізняється тим, що впадини на бурті храпового механізму виконані несиметрично зі скосом в напрямку обертання ротора або в напрямку, протилежному до обертання ротора, за рахунок чого храповий механізм забезпечує можливість переривчастого односпрямованого прокручування інерційного диска в сторону обертання ротора або в сторону, протилежну обертанню ротора, під дією моменту сил інерції обертання, який виникає при стрибкоподібному, відповідно зменшенні або збільшенні миттєвої швидкості обертання ротора. 5 UA 107556 C2 Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16F 15/36, G01M 1/36, G01M 1/38, G01M 1/18
Мітки: балансування, пристрій, спосіб, ротора, здійснення, автоматичного
Код посилання
<a href="https://ua.patents.su/8-107556-sposib-avtomatichnogo-balansuvannya-rotora-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного балансування ротора та пристрій для його здійснення</a>
Спосіб балансування автомобільних колес та пристрій для його здійснення
Номер патенту: 39680
Опубліковано: 15.06.2001
Автори: Катчук Анатолій Миколайович, Смоловік Олександр Олександровіч, Беліков Валерій Григорійович, Христофоров Валерій Георгійович, Борщ Євген Григорович
Мітки: балансування, автомобільних, пристрій, спосіб, колес, здійснення
Формула / Реферат:
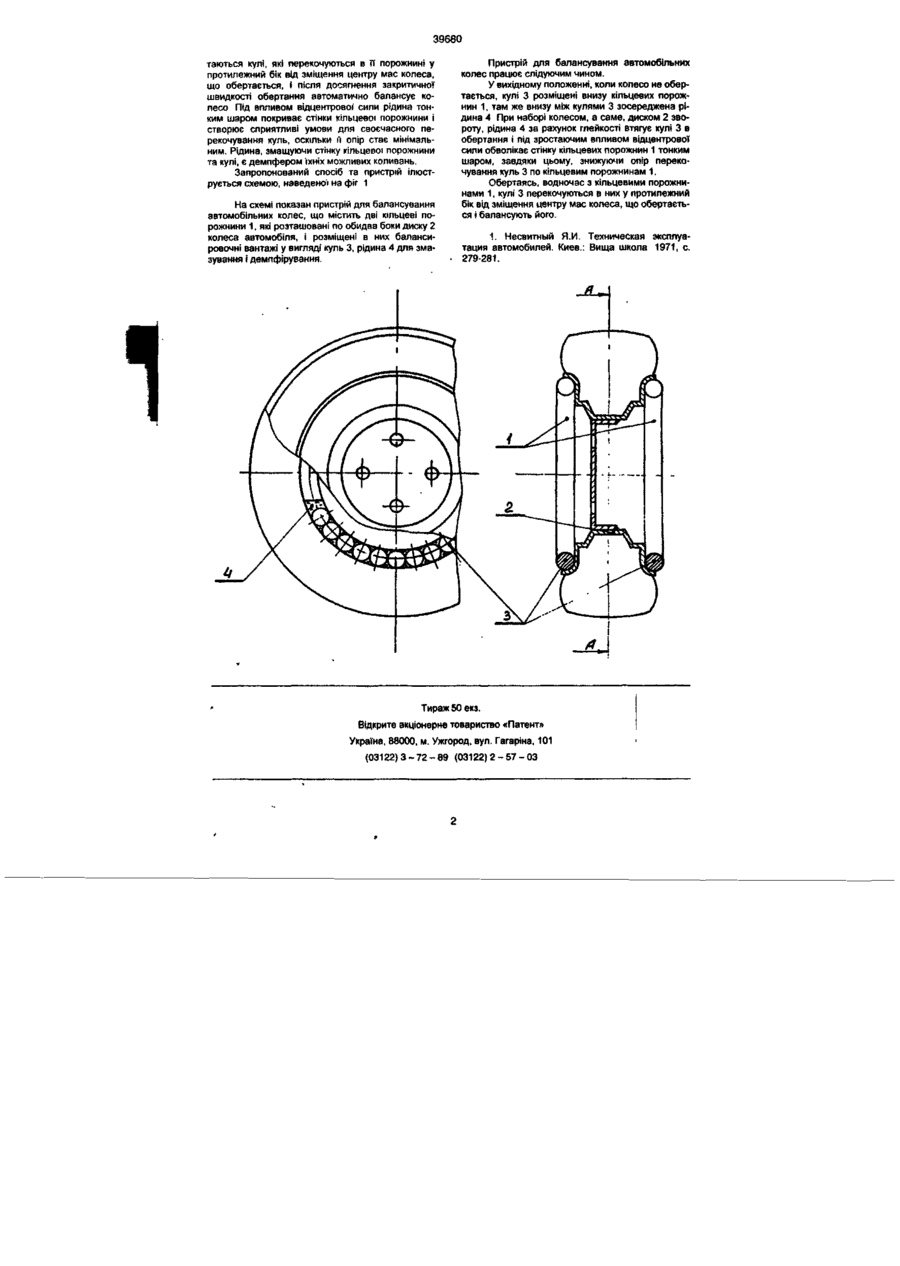
1. Спосіб балансування автомобільних коліс, що включає вплив балансувальних вантажів певної ваги у певному місці на колесо автомобіля, який відрізняється тим, що під час руху автомобіля балансувальні вантажі автоматично визначають свою вагу та місце розташування на колесі автомобіля.2. Пристрій для балансування автомобільних коліс, що містить балансувальні вантажі, скоби кріплення їх до диска колеса автомобіля, який відрізняється тим,...
Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами
Номер патенту: 78898
Опубліковано: 10.04.2013
Автори: Гончаров Валерій Володимирович, Філімоніхін Геннадій Борисович, Паненко Вадим Григорович, Гадяка Володимир Григорович
Мітки: ротора, спосіб, пасивними, двоопорного, автобалансирами, балансування, гнучкого
Формула / Реферат:
Спосіб балансування гнучкого двоопорного ротора пасивними автобалансирами, який полягає у тому, що на гнучкий ротор, встановлений на дві опори, співвісно поздовжній осі гнучкого ротора встановлюють пасивні автобалансири будь-якого типу, у кількості 2-х штук, і гнучкий ротор розганяють до сталої експлуатаційної швидкості обертання, яка більша за першу критичну швидкість, який відрізняється тим, що пасивні автобалансири розміщують в площинах,...
Пристрій для автоматичного балансування коліс автомобіля (автобалансир)
Номер патенту: 15697
Опубліковано: 17.07.2006
Автори: Драч Ілона Володимирівна, Ткачук Віталій Павлович, Чоловський Роман Геннадійович, Ройзман Вілен Петрович
МПК: G01M 1/00
Мітки: коліс, автоматичного, пристрій, балансування, автомобіля, автобалансир
Формула / Реферат:
Пристрій для автоматичного балансування коліс автомобіля (автобалансир), що виконаний у вигляді корпусу-оболонки, всередині якої вільно переміщується корегувальний вантаж (кульки та рідина), який відрізняється тим, що складається із двох жорстко з'єднаних між собою за допомогою пружних пластин торів, один із яких частково заповнений металічними кулями, а інший - частково заповнений рідиною.
Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами
Номер патенту: 74641
Опубліковано: 12.11.2012
Автори: Олійніченко Любов Сергіївна, Філімоніхін Геннадій Борисович, Гончаров Валерій Володимирович
МПК: G01M 1/32, F04D 29/66
Мітки: жорсткого, динамічного, пасивними, спосіб, балансування, автобалансирами, ротора
Формула / Реферат:
Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами, який полягає у тому, що на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але є меншою за першу критичну швидкість обертання гнучкого ротора, який відрізняється тим, що ротор встановлюють у корпусі так, що...
Пристрій для автоматичного балансування
Номер патенту: 33621
Опубліковано: 15.02.2001
Автори: Сахно Євгеній Юрійович, Федориненко Дмитро Юрійович
МПК: B23B 19/00
Мітки: автоматичного, пристрій, балансування
Текст:
...в корпусі 3. Затиск неврівноваженої деталі відбувається в патроні 11, герметично сполученого з корпусом 3, який після заповнення рідиною виконує роль гідравлічного вузла гальмування. Корегуючі диски 1 і 2 встановлені в корпусі 3 за допомогою підшипників 12. Пристрій автоматичного балансування працює таким чином. При обертанні шпинделя 4 надається обертання корпусу 3 з неврівноваженими дисками 1 і 2 та патрону 11 з неврівноваженою...
Попередній патент: Спосіб виробництва полікристалічного кремнію, придатного для виготовлення фотогальванічних сонячних елементів
Наступний патент: Автомобільна газогенераторна установка
Випадковий патент: Викатний елемент для низьковольтного розподільчого пристрою