Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами
Номер патенту: 74641
Опубліковано: 12.11.2012
Автори: Гончаров Валерій Володимирович, Олійніченко Любов Сергіївна, Філімоніхін Геннадій Борисович

Формула / Реферат
Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами, який полягає у тому, що на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але є меншою за першу критичну швидкість обертання гнучкого ротора, який відрізняється тим, що ротор встановлюють у корпусі так, що поздовжній осьовий момент інерції ротора менший за суму осьових моментів інерції корпуса і ротора відносно будь-якої поперечної осі ротора, з можливістю обертання відносно корпуса навколо власної поздовжньої осі, а корпус встановлюють на в'язко-пружні опори.
Текст
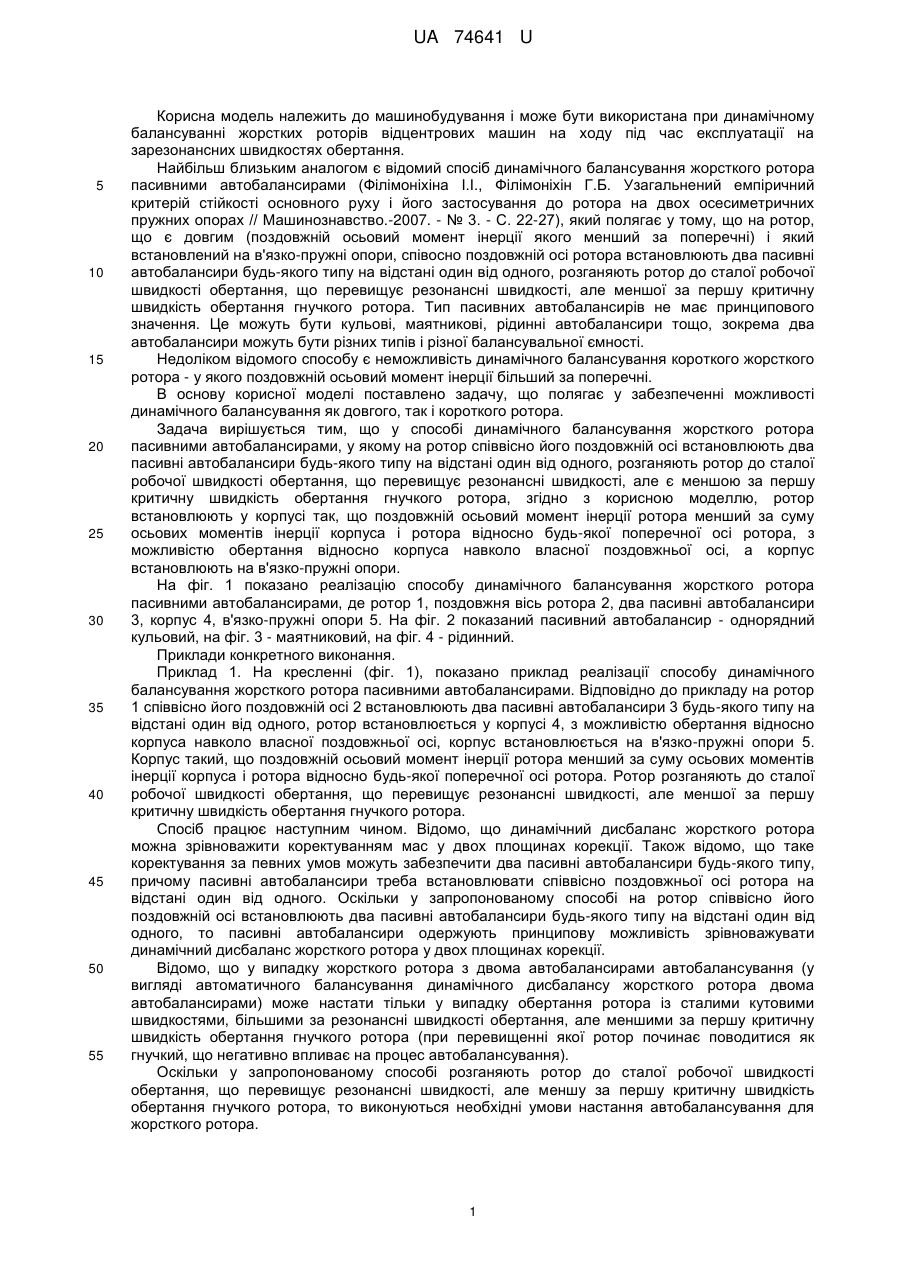
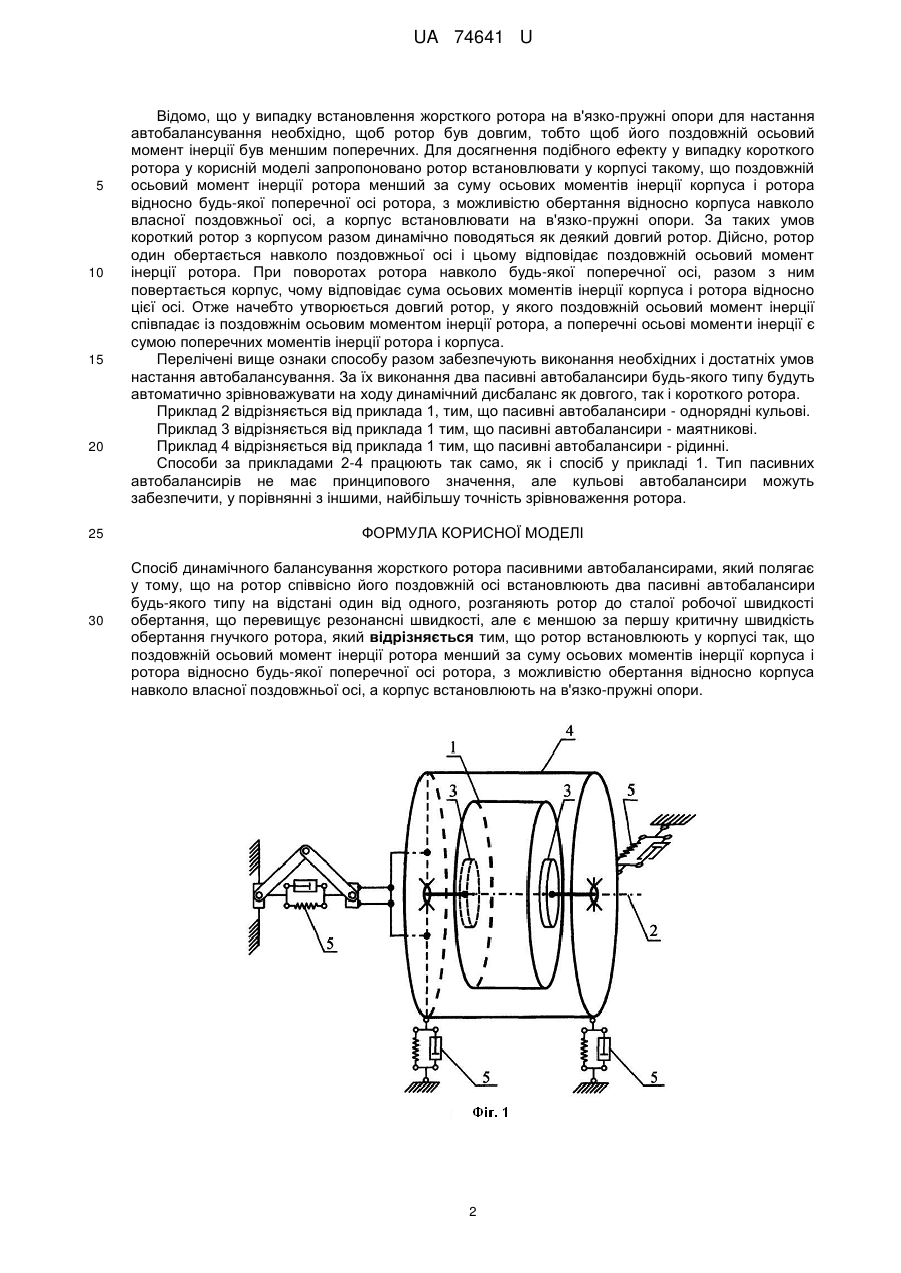
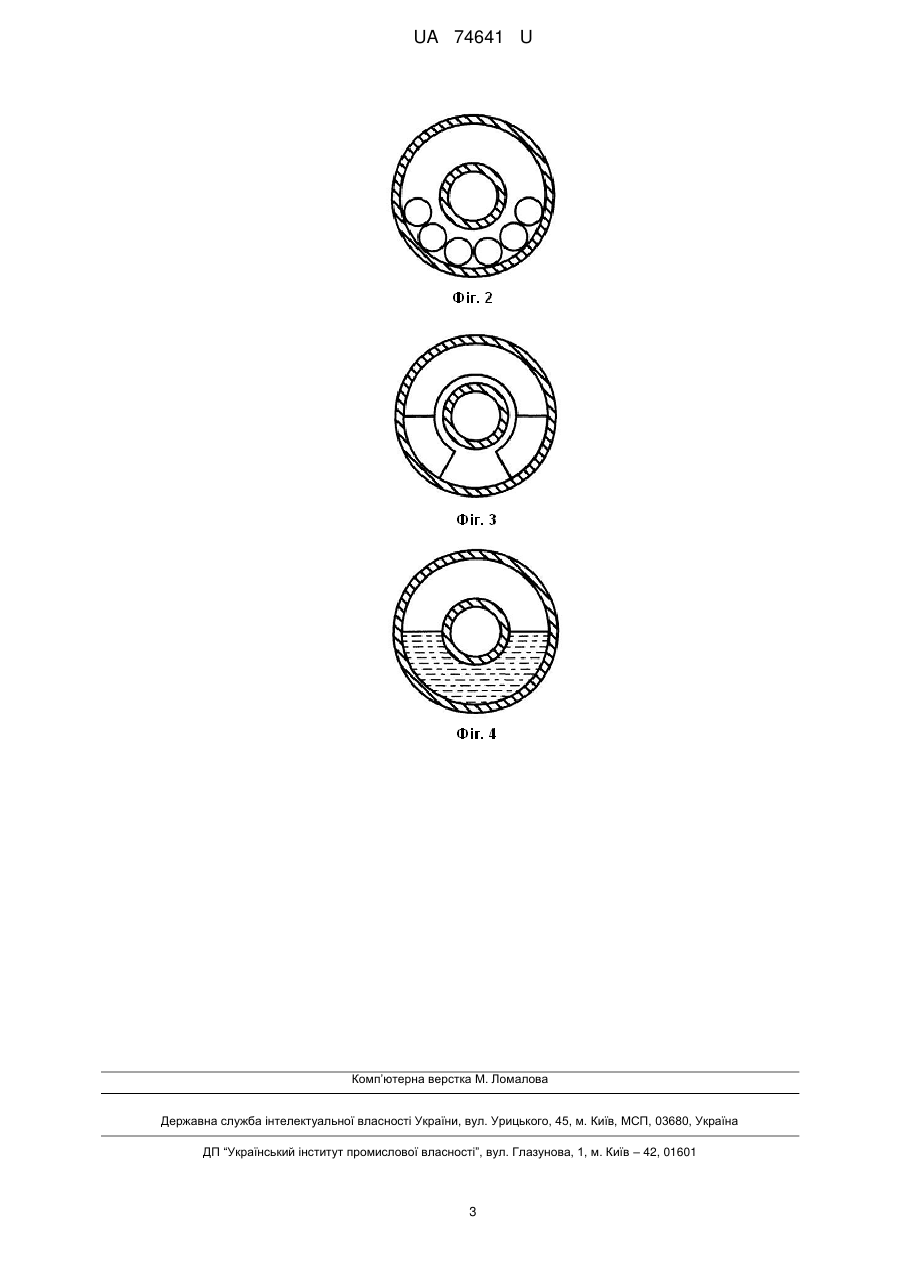
Реферат: Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами, у якому на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості. Ротор встановлюють у корпусі так, що поздовжній осьовий момент інерції ротора менший за суму осьових моментів інерції корпуса і ротора відносно будь-якої поперечної осі ротора. UA 74641 U (12) UA 74641 U UA 74641 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування і може бути використана при динамічному балансуванні жорстких роторів відцентрових машин на ходу під час експлуатації на зарезонансних швидкостях обертання. Найбільш близьким аналогом є відомий спосіб динамічного балансування жорсткого ротора пасивними автобалансирами (Філімоніхіна І.І., Філімоніхін Г.Б. Узагальнений емпіричний критерій стійкості основного руху і його застосування до ротора на двох осесиметричних пружних опорах // Машинознавство.-2007. - № 3. - С. 22-27), який полягає у тому, що на ротор, що є довгим (поздовжній осьовий момент інерції якого менший за поперечні) і який встановлений на в'язко-пружні опори, співосно поздовжній осі ротора встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але меншої за першу критичну швидкість обертання гнучкого ротора. Тип пасивних автобалансирів не має принципового значення. Це можуть бути кульові, маятникові, рідинні автобалансири тощо, зокрема два автобалансири можуть бути різних типів і різної балансувальної ємності. Недоліком відомого способу є неможливість динамічного балансування короткого жорсткого ротора - у якого поздовжній осьовий момент інерції більший за поперечні. В основу корисної моделі поставлено задачу, що полягає у забезпеченні можливості динамічного балансування як довгого, так і короткого ротора. Задача вирішується тим, що у способі динамічного балансування жорсткого ротора пасивними автобалансирами, у якому на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але є меншою за першу критичну швидкість обертання гнучкого ротора, згідно з корисною моделлю, ротор встановлюють у корпусі так, що поздовжній осьовий момент інерції ротора менший за суму осьових моментів інерції корпуса і ротора відносно будь-якої поперечної осі ротора, з можливістю обертання відносно корпуса навколо власної поздовжньої осі, а корпус встановлюють на в'язко-пружні опори. На фіг. 1 показано реалізацію способу динамічного балансування жорсткого ротора пасивними автобалансирами, де ротор 1, поздовжня вісь ротора 2, два пасивні автобалансири 3, корпус 4, в'язко-пружні опори 5. На фіг. 2 показаний пасивний автобалансир - однорядний кульовий, на фіг. 3 - маятниковий, на фіг. 4 - рідинний. Приклади конкретного виконання. Приклад 1. На кресленні (фіг. 1), показано приклад реалізації способу динамічного балансування жорсткого ротора пасивними автобалансирами. Відповідно до прикладу на ротор 1 співвісно його поздовжній осі 2 встановлюють два пасивні автобалансири 3 будь-якого типу на відстані один від одного, ротор встановлюється у корпусі 4, з можливістю обертання відносно корпуса навколо власної поздовжньої осі, корпус встановлюється на в'язко-пружні опори 5. Корпус такий, що поздовжній осьовий момент інерції ротора менший за суму осьових моментів інерції корпуса і ротора відносно будь-якої поперечної осі ротора. Ротор розганяють до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але меншої за першу критичну швидкість обертання гнучкого ротора. Спосіб працює наступним чином. Відомо, що динамічний дисбаланс жорсткого ротора можна зрівноважити коректуванням мас у двох площинах корекції. Також відомо, що таке коректування за певних умов можуть забезпечити два пасивні автобалансири будь-якого типу, причому пасивні автобалансири треба встановлювати співвісно поздовжньої осі ротора на відстані один від одного. Оскільки у запропонованому способі на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, то пасивні автобалансири одержують принципову можливість зрівноважувати динамічний дисбаланс жорсткого ротора у двох площинах корекції. Відомо, що у випадку жорсткого ротора з двома автобалансирами автобалансування (у вигляді автоматичного балансування динамічного дисбалансу жорсткого ротора двома автобалансирами) може настати тільки у випадку обертання ротора із сталими кутовими швидкостями, більшими за резонансні швидкості обертання, але меншими за першу критичну швидкість обертання гнучкого ротора (при перевищенні якої ротор починає поводитися як гнучкий, що негативно впливає на процес автобалансування). Оскільки у запропонованому способі розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але меншу за першу критичну швидкість обертання гнучкого ротора, то виконуються необхідні умови настання автобалансування для жорсткого ротора. 1 UA 74641 U 5 10 15 20 25 30 Відомо, що у випадку встановлення жорсткого ротора на в'язко-пружні опори для настання автобалансування необхідно, щоб ротор був довгим, тобто щоб його поздовжній осьовий момент інерції був меншим поперечних. Для досягнення подібного ефекту у випадку короткого ротора у корисній моделі запропоновано ротор встановлювати у корпусі такому, що поздовжній осьовий момент інерції ротора менший за суму осьових моментів інерції корпуса і ротора відносно будь-якої поперечної осі ротора, з можливістю обертання відносно корпуса навколо власної поздовжньої осі, а корпус встановлювати на в'язко-пружні опори. За таких умов короткий ротор з корпусом разом динамічно поводяться як деякий довгий ротор. Дійсно, ротор один обертається навколо поздовжньої осі і цьому відповідає поздовжній осьовий момент інерції ротора. При поворотах ротора навколо будь-якої поперечної осі, разом з ним повертається корпус, чому відповідає сума осьових моментів інерції корпуса і ротора відносно цієї осі. Отже начебто утворюється довгий ротор, у якого поздовжній осьовий момент інерції співпадає із поздовжнім осьовим моментом інерції ротора, а поперечні осьові моменти інерції є сумою поперечних моментів інерції ротора і корпуса. Перелічені вище ознаки способу разом забезпечують виконання необхідних і достатніх умов настання автобалансування. За їх виконання два пасивні автобалансири будь-якого типу будуть автоматично зрівноважувати на ходу динамічний дисбаланс як довгого, так і короткого ротора. Приклад 2 відрізняється від приклада 1, тим, що пасивні автобалансири - однорядні кульові. Приклад 3 відрізняється від приклада 1 тим, що пасивні автобалансири - маятникові. Приклад 4 відрізняється від приклада 1 тим, що пасивні автобалансири - рідинні. Способи за прикладами 2-4 працюють так само, як і спосіб у прикладі 1. Тип пасивних автобалансирів не має принципового значення, але кульові автобалансири можуть забезпечити, у порівнянні з іншими, найбільшу точність зрівноваження ротора. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами, який полягає у тому, що на ротор співвісно його поздовжній осі встановлюють два пасивні автобалансири будь-якого типу на відстані один від одного, розганяють ротор до сталої робочої швидкості обертання, що перевищує резонансні швидкості, але є меншою за першу критичну швидкість обертання гнучкого ротора, який відрізняється тим, що ротор встановлюють у корпусі так, що поздовжній осьовий момент інерції ротора менший за суму осьових моментів інерції корпуса і ротора відносно будь-якої поперечної осі ротора, з можливістю обертання відносно корпуса навколо власної поздовжньої осі, а корпус встановлюють на в'язко-пружні опори. 2 UA 74641 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for dynamic balancing a rigid rotor with passive self balancers
Автори англійськоюFilimonikhin Hennadiy Borysovych, Honcharov Valerii Volodymyrovych, Oliinichenko Liubov Serhiivna
Назва патенту російськоюСпособ динамического балансирования жесткого ротора пассивными автобалансирами
Автори російськоюФилимонихин Геннадий Борисович, Гончаров Валерий Владимирович, Олийниченко Любовь Сергеевна
МПК / Мітки
МПК: F04D 29/66, G01M 1/32
Мітки: динамічного, спосіб, жорсткого, пасивними, автобалансирами, ротора, балансування
Код посилання
<a href="https://ua.patents.su/5-74641-sposib-dinamichnogo-balansuvannya-zhorstkogo-rotora-pasivnimi-avtobalansirami.html" target="_blank" rel="follow" title="База патентів України">Спосіб динамічного балансування жорсткого ротора пасивними автобалансирами</a>
Верстат для динамічного балансування вертикальних роторів
Номер патенту: 18499
Опубліковано: 25.12.1997
Автори: Гавріков Андрій Віталійович, Новиков Ігорь Анатолійович
МПК: G01M 1/04
Мітки: верстат, динамічного, балансування, вертикальних, роторів
Формула / Реферат:
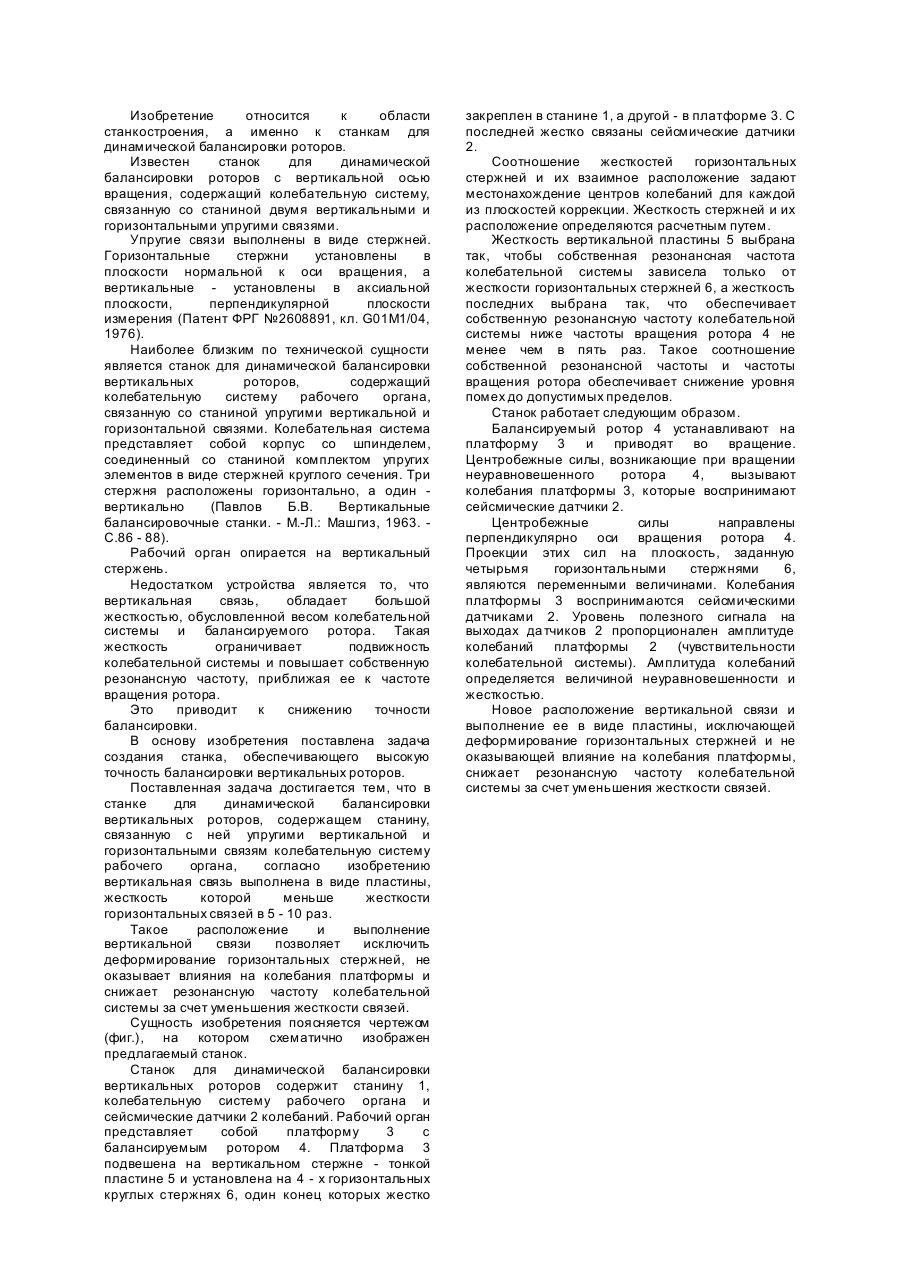
Станок для динамической балансировки вертикальных роторов, содержащий станину, связанную с ней упругими вертикальной и горизонтальной связями колебательную систему рабочего органа, отличающийся тем, что вертикальная связь выполнена в виде пластины, жесткость которой меньше жесткости горизонтальных связей в 5 - 10 раз.
Спосіб балансування ротора машини по нестабільній амплітуді вібраціії
Номер патенту: 30640
Опубліковано: 11.03.2008
Автори: Романов Віктор Олександрович, Вишневський Володимир Мирославович, Лісовий Георгій Миколайович
МПК: G01B 5/00
Мітки: нестабільній, вібраціії, амплітуди, балансування, спосіб, машини, ротора
Формула / Реферат:
Спосіб балансування ротора машини по нестабільній амплітуді вібрації, при якому виконують вимірювання параметрів вібрації машини в початковому стані, а потім при закріпленні коректувальної маси, з однаковим дисбалансом одне в вільно вибране місце і два по колу з кутом на 120° і 240° від нього, та по їх параметрах знаходять місце знаходження і розмір зрівноважуючої маси, який відрізняється тим, що виміряють максимальні і мінімальні значення...
Пристрій для балансування обертової деталі, зокрема ротора турбореактивного двигуна
Номер патенту: 84852
Опубліковано: 10.12.2008
Автори: Шаррьє Емманюель Бернар, Марі, Супізон Жан-Люк, Пабіон Філіпп, Жан-Пьєр
МПК: F02B 53/00, F03B 3/00
Мітки: турбореактивного, балансування, обертової, деталі, двигуна, ротора, пристрій, зокрема
Формула / Реферат:
1. Пристрій для балансування обертової деталі, зокрема ротора турбіни в турбомашині, такій як турбореактивний двигун, який містить щонайменше один балансувальний тягарець, встановлений на кільцевому фланці деталі, і кріпильний засіб для кріплення балансувального тягарця на згаданому кільцевому фланці, який відрізняється тим, що балансувальний тягарець має засіб зачеплення для зачеплення на згаданому кільцевому фланці деталі, фіксувальні...
Горизонтальний барабанний вузол з автобалансирами для відцентрових машин
Номер патенту: 75931
Опубліковано: 15.06.2006
Автори: Філімоніхін Геннадій Борисович, Майоров Володимир Сергійович
МПК: G01M 1/02
Мітки: машин, горизонтальний, вузол, відцентрових, барабанний, автобалансирами
Формула / Реферат:
1. Горизонтальний барабанний вузол з автобалансирами для відцентрових машин, що містить барабан, який має ребра жорсткості та насаджений на вал, шків, який також насаджений на вал, та два зрівноважуючих автобалансири, який відрізняється тим, що автобалансири насаджені на вал, причому один автобалансир суміщений із ребрами жорсткості барабана, а другий - із шківом.2. Горизонтальний барабанний вузол за п. 1, який відрізняється тим, що...
Верстат для динамічного балансування гранувальних дисків
Номер патенту: 9632
Опубліковано: 30.09.1996
Автори: Пузанов Геннадій Михайлович, Папінов Володимир Миколайович
Мітки: динамічного, дисків, гранувальних, верстат, балансування
Формула / Реферат:
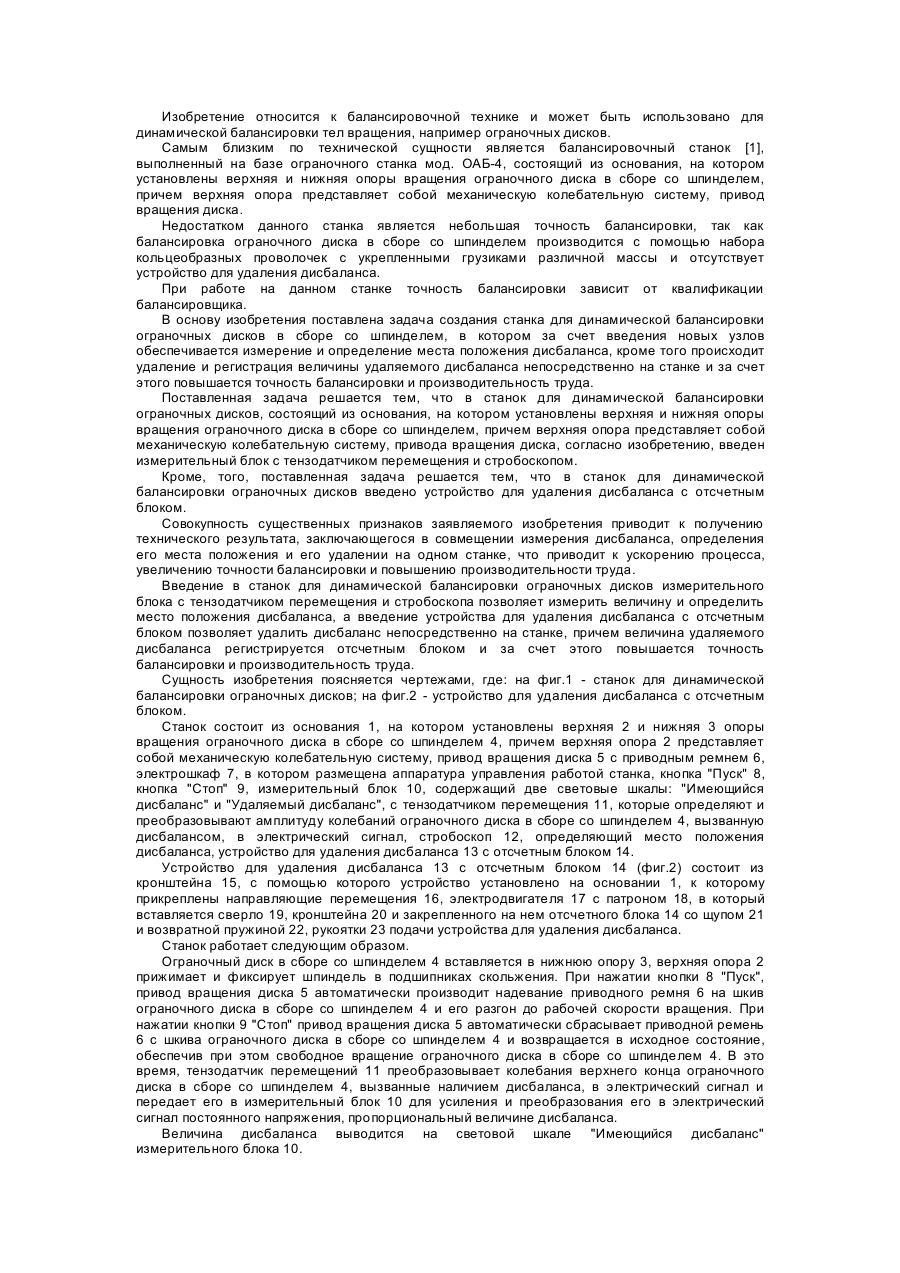
Станок для динамической балансировки ограночных дисков, состоящий из основания, на котором установлены верхняя и нижняя опоры вращения ограничного диска в сборе со шпинделем и привод вращения, причем верхняя опора выполнена в виде механической колебательной системы, отличающийся тем, что станок содержит измерительный блок с тензодатчиком перемещения и стробоскопом и устройство удаления дисбаланса с отсчетным блоком.
Попередній патент: Шпиндельний вузол верстата
Наступний патент: Інерційний повітряно-решітний сепаратор
Випадковий патент: Вологозахищенний світильник із світловипромінюючими діодами