Спосіб гальмування шахтної підіймальної установки
Номер патенту: 114179
Опубліковано: 10.05.2017
Автори: Васильєв Євгеній Володимирович, Васильєв Володимир Іванович

Формула / Реферат
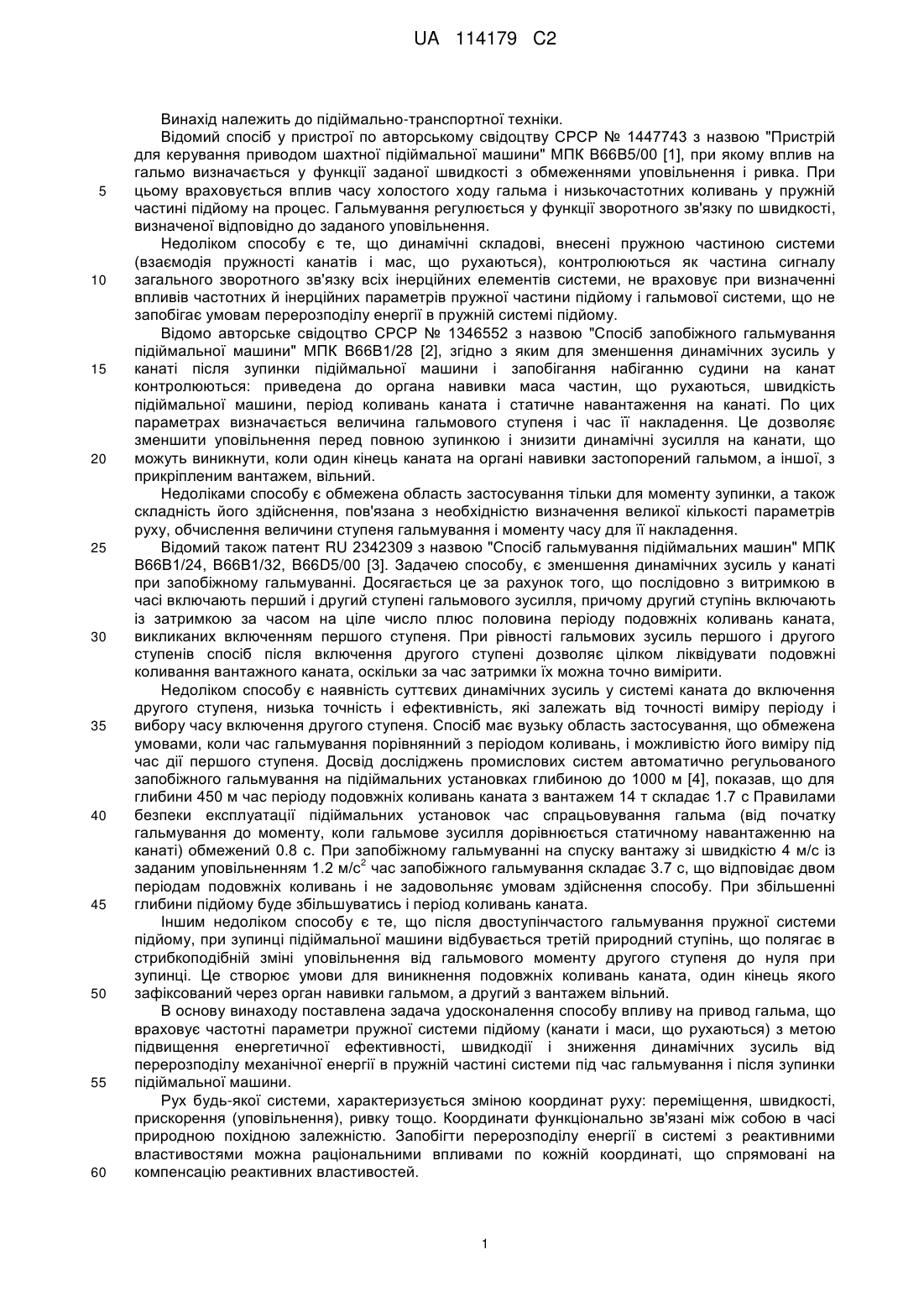
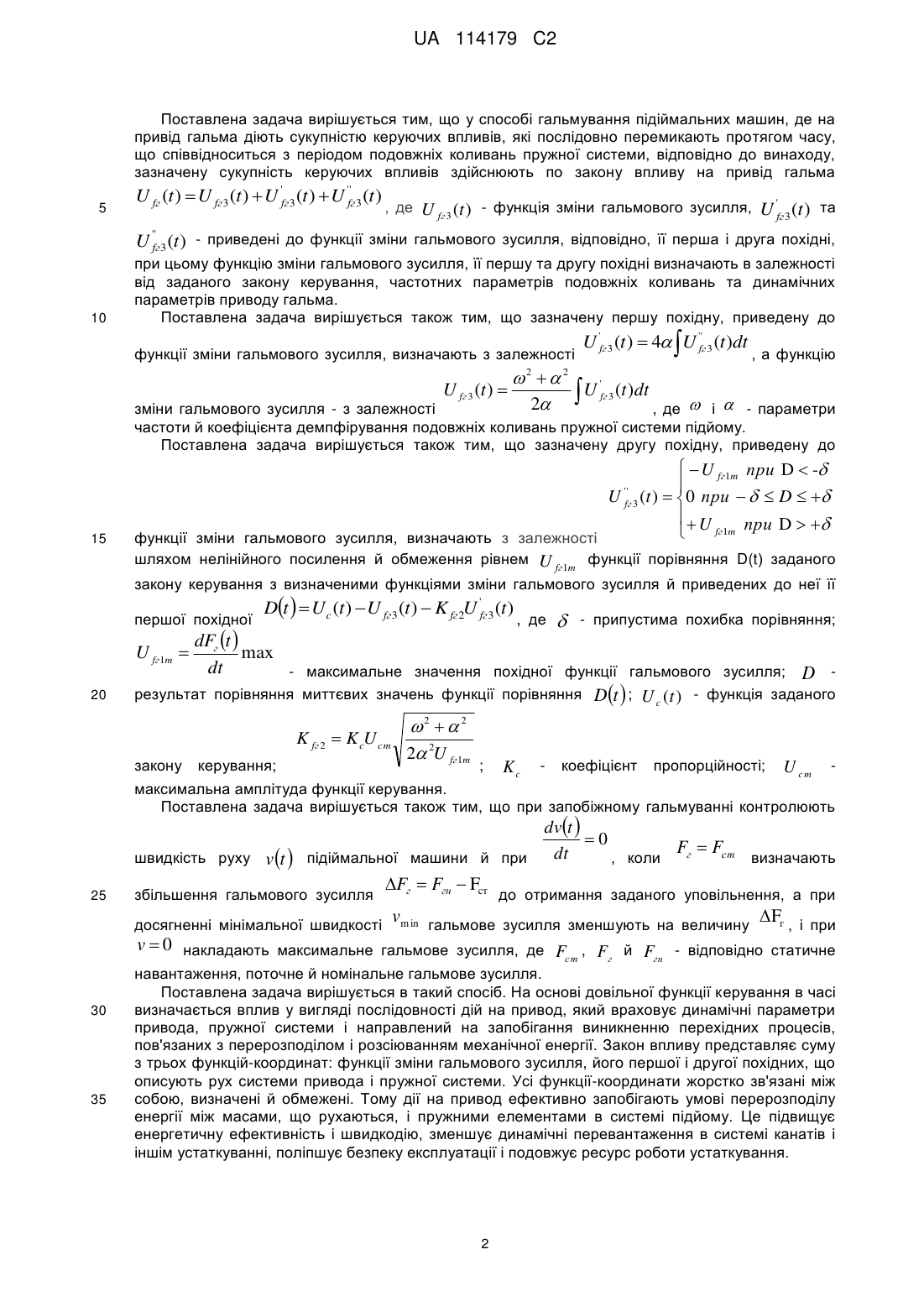
1. Спосіб гальмування підіймальних машин, де на привід гальма діють сукупністю керуючих впливів, які послідовно перемикають протягом часу, що співвідноситься з періодом подовжніх коливань пружної системи, який відрізняється тим, що зазначену сукупність керуючих впливів здійснюють по закону впливу на привід гальма ![]() , де
, де ![]() - функція зміни гальмового зусилля,
- функція зміни гальмового зусилля, ![]() та
та ![]() - приведені до функції зміни гальмового зусилля, відповідно, її перша і друга похідні, при цьому функцію зміни гальмового зусилля, її першу та другу похідні визначають в залежності від заданого закону керування, частотних параметрів подовжніх коливань та динамічних параметрів приводу гальма.
- приведені до функції зміни гальмового зусилля, відповідно, її перша і друга похідні, при цьому функцію зміни гальмового зусилля, її першу та другу похідні визначають в залежності від заданого закону керування, частотних параметрів подовжніх коливань та динамічних параметрів приводу гальма.
2. Спосіб за п. 1, який відрізняється тим, що зазначену першу похідну, приведену до функції зміни гальмового зусилля, визначають з залежності ![]() , а функцію зміни гальмового зусилля - з залежності
, а функцію зміни гальмового зусилля - з залежності ![]() , де
, де ![]() і
і ![]() - параметри частоти й коефіцієнта демпфірування подовжніх коливань пружної системи підйому.
- параметри частоти й коефіцієнта демпфірування подовжніх коливань пружної системи підйому.
3. Спосіб за п. 1, який відрізняється тим, що зазначену другу похідну, приведену до функції зміни гальмового зусилля визначають з залежності  шляхом нелінійного посилення й обмеження рівним
шляхом нелінійного посилення й обмеження рівним ![]() функції порівняння D(t) заданого закону керування з визначеними функціями зміни гальмового зусилля й приведених до неї її першої похідної
функції порівняння D(t) заданого закону керування з визначеними функціями зміни гальмового зусилля й приведених до неї її першої похідної ![]() , де
, де ![]() - припустима похибка порівняння;
- припустима похибка порівняння; ![]() - максимальне значення похідної функції гальмового зусилля;
- максимальне значення похідної функції гальмового зусилля; ![]() - результат порівняння миттєвих значень функції порівняння
- результат порівняння миттєвих значень функції порівняння ![]() ;
; ![]() - функція заданого закону керування;
- функція заданого закону керування;  ;
; ![]() - коефіцієнт пропорційності;
- коефіцієнт пропорційності; ![]() - максимальна амплітуда функції керування.
- максимальна амплітуда функції керування.
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що при запобіжному гальмуванні контролюють швидкість руху ![]() підіймальної машини й при
підіймальної машини й при ![]() , коли
, коли ![]() визначають збільшення гальмового зусилля
визначають збільшення гальмового зусилля ![]() до отримання заданого уповільнення, а при досягненні мінімальної швидкості
до отримання заданого уповільнення, а при досягненні мінімальної швидкості ![]() гальмове зусилля зменшують на величину
гальмове зусилля зменшують на величину ![]() , і при
, і при ![]() накладають максимальне гальмове зусилля, де
накладають максимальне гальмове зусилля, де ![]() ,
, ![]() й
й ![]() - відповідно статичне навантаження, поточне й номінальне гальмові зусилля.
- відповідно статичне навантаження, поточне й номінальне гальмові зусилля.
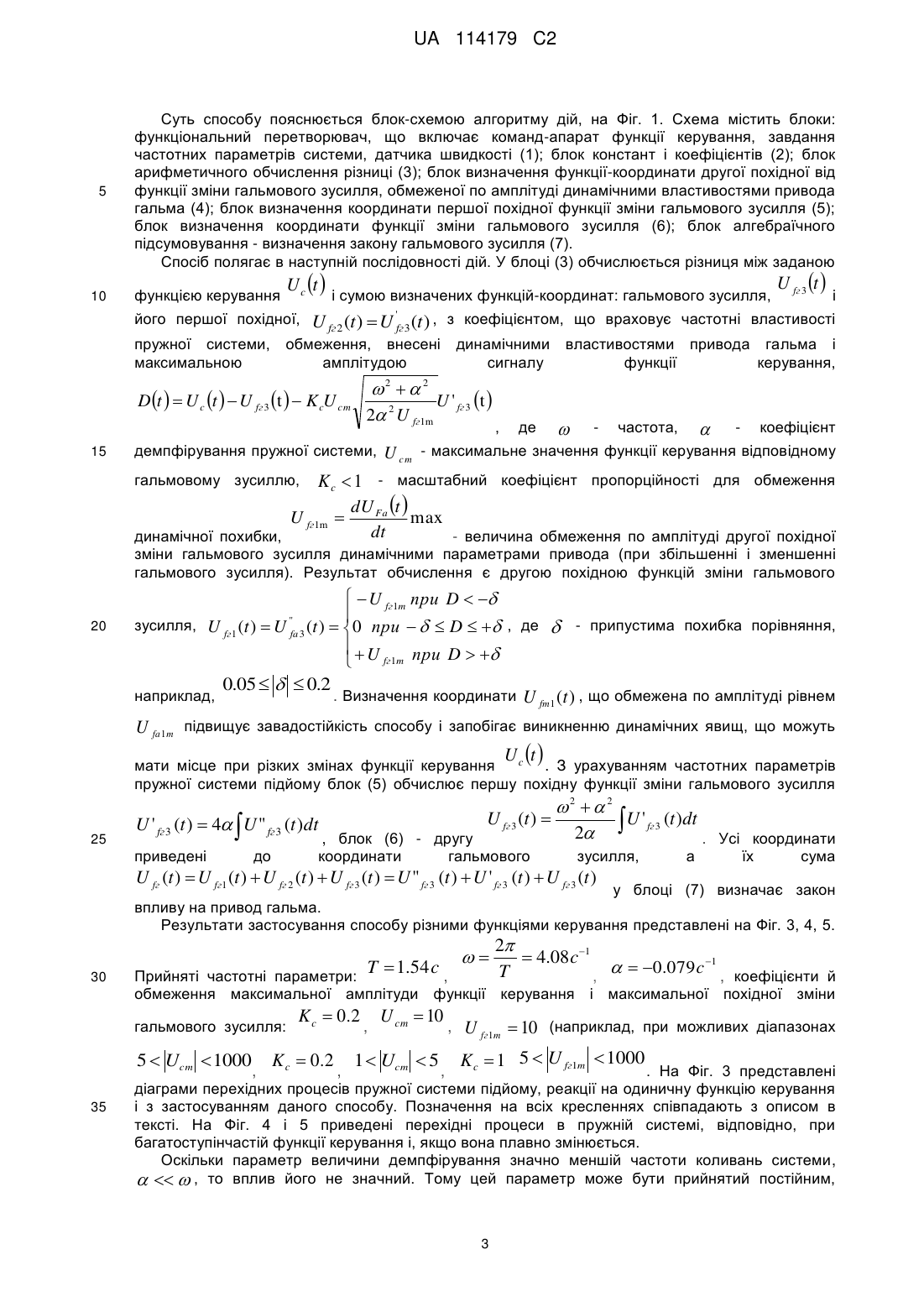
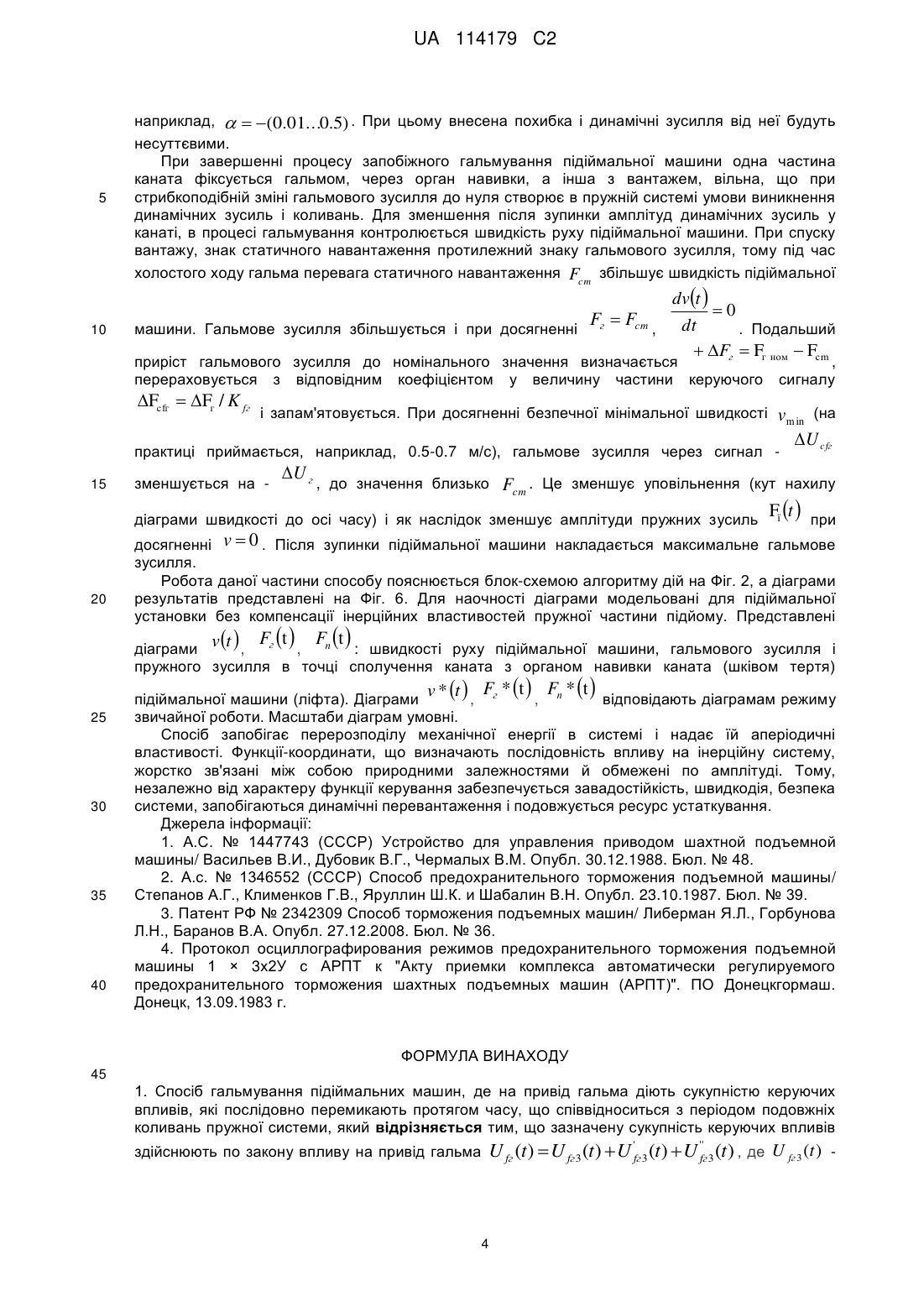
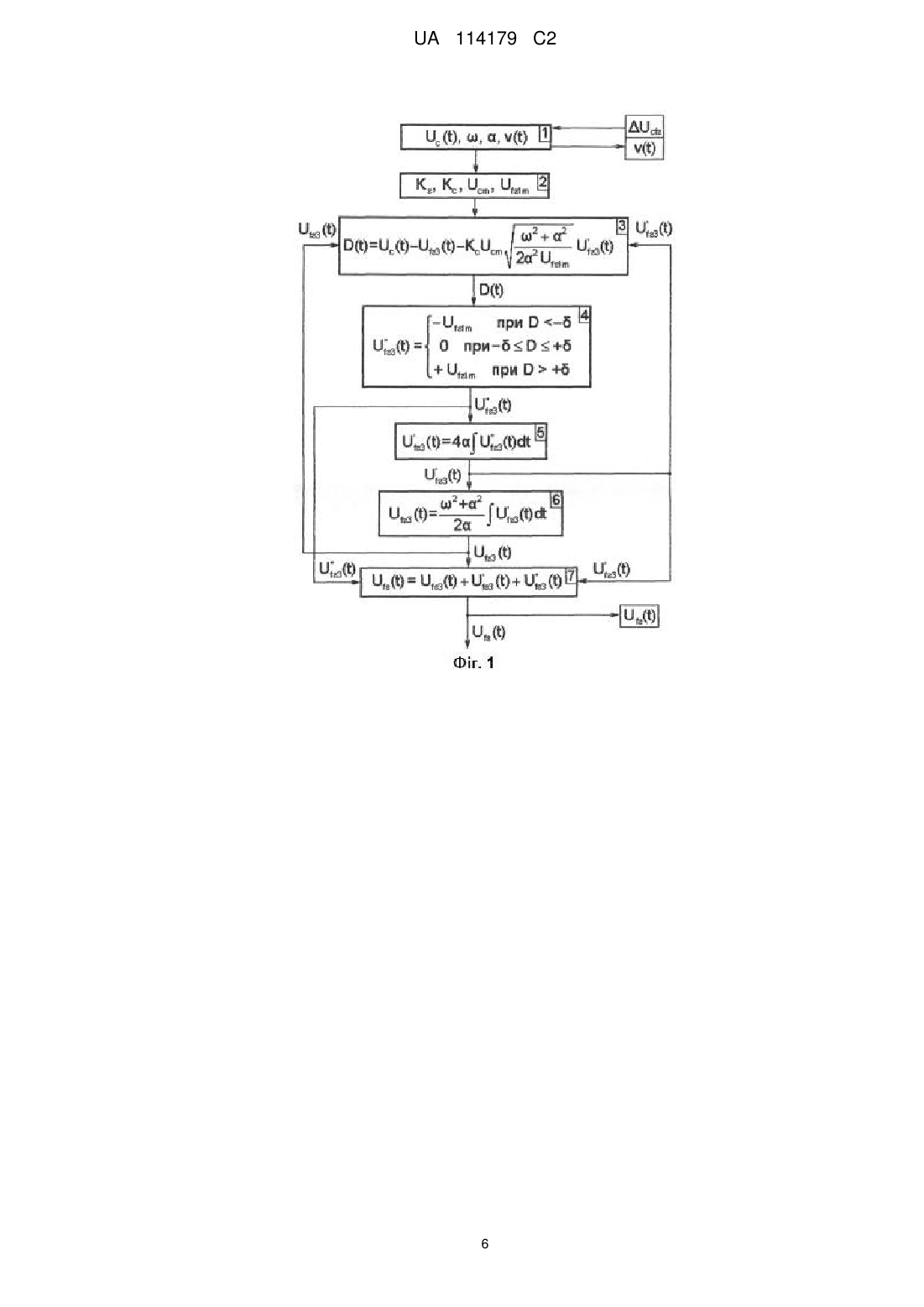
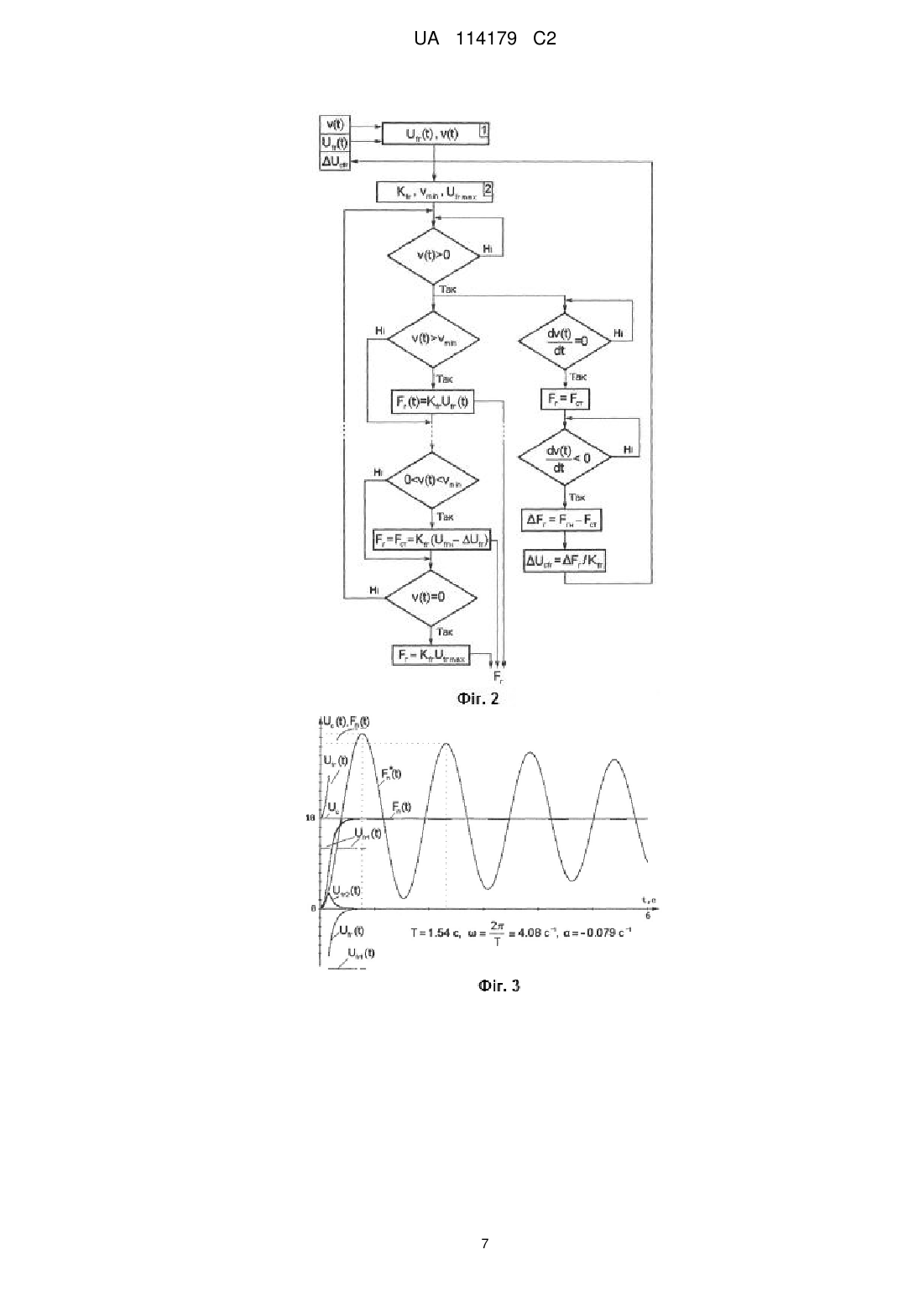
Текст
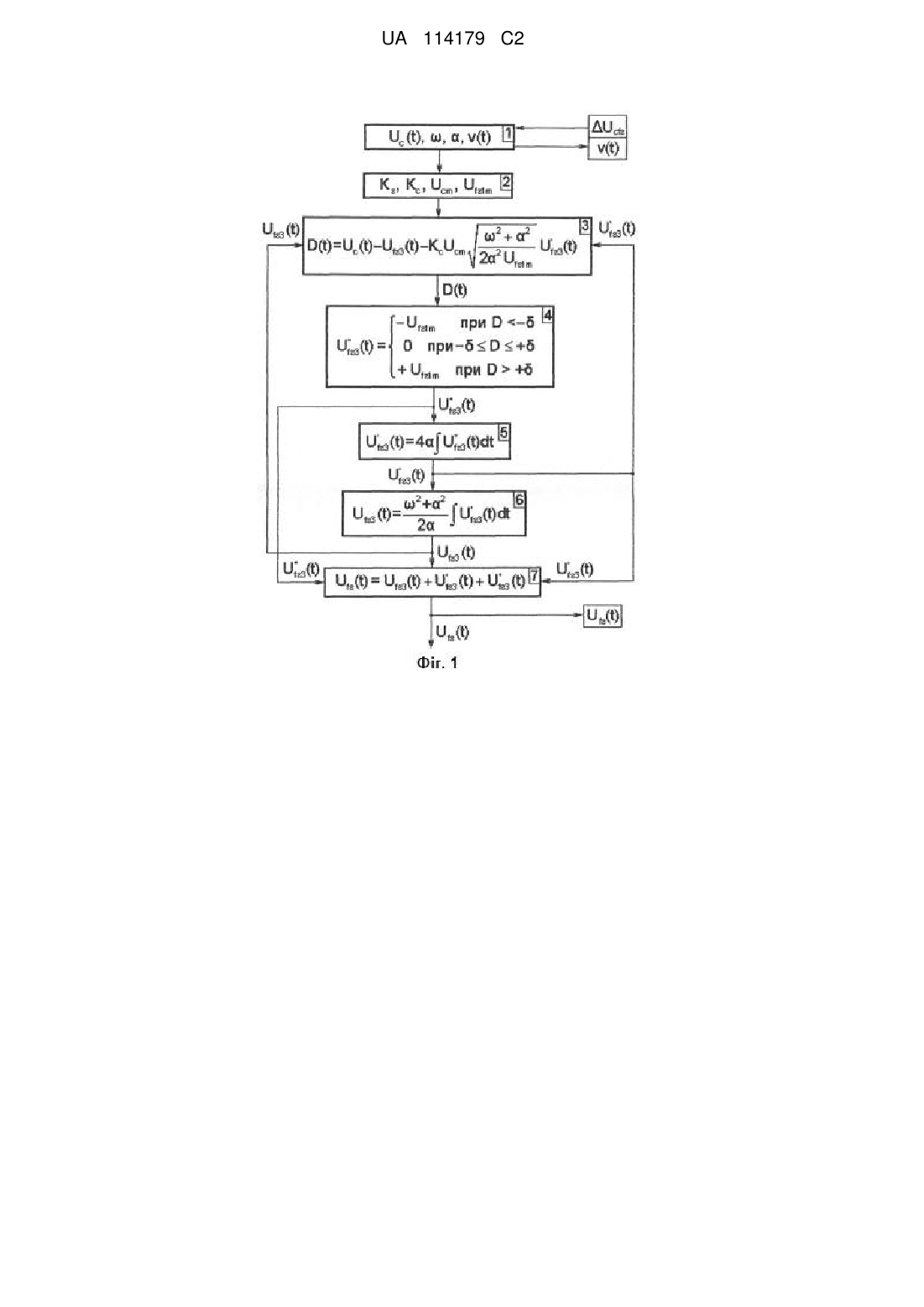
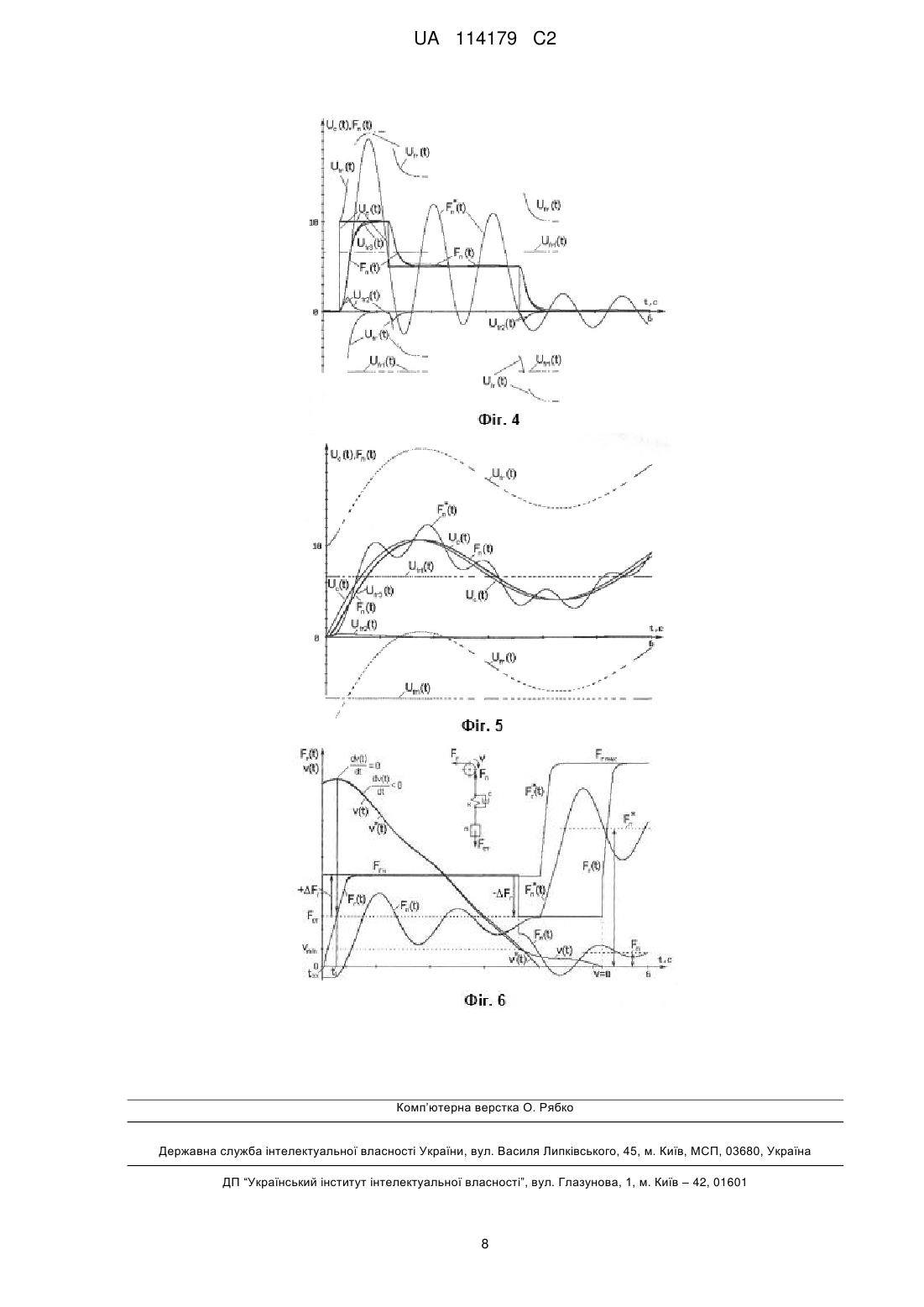
Реферат: Винахід належить до підіймально-транспортної техніки. Спосіб гальмування підіймальних машин, передбачає вплив на привід гальма за законом, що є сумою функції зміни гальмового зусилля та приведених до неї її першої і другої похідних. Функцію зміни гальмового зусилля, її першу та другу похідні визначають в залежності від заданого закону керування, частотних параметрів подовжніх коливань та динамічних параметрів приводу гальма. Технічним результатом є зменшення величини перепаду уповільнення в момент зупинки і, як наслідок, мінімізація амплітуди коливань при накладенні максимального гальмового зусилля. UA 114179 C2 (12) UA 114179 C2 UA 114179 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до підіймально-транспортної техніки. Відомий спосіб у пристрої по авторському свідоцтву СРСР № 1447743 з назвою "Пристрій для керування приводом шахтної підіймальної машини" МПК В66В5/00 [1], при якому вплив на гальмо визначається у функції заданої швидкості з обмеженнями уповільнення і ривка. При цьому враховується вплив часу холостого ходу гальма і низькочастотних коливань у пружній частині підйому на процес. Гальмування регулюється у функції зворотного зв'язку по швидкості, визначеної відповідно до заданого уповільнення. Недоліком способу є те, що динамічні складові, внесені пружною частиною системи (взаємодія пружності канатів і мас, що рухаються), контролюються як частина сигналу загального зворотного зв'язку всіх інерційних елементів системи, не враховує при визначенні впливів частотних й інерційних параметрів пружної частини підйому і гальмової системи, що не запобігає умовам перерозподілу енергії в пружній системі підйому. Відомо авторське свідоцтво СРСР № 1346552 з назвою "Спосіб запобіжного гальмування підіймальної машини" МПК В66В1/28 [2], згідно з яким для зменшення динамічних зусиль у канаті після зупинки підіймальної машини і запобігання набіганню судини на канат контролюються: приведена до органа навивки маса частин, що рухаються, швидкість підіймальної машини, період коливань каната і статичне навантаження на канаті. По цих параметрах визначається величина гальмового ступеня і час її накладення. Це дозволяє зменшити уповільнення перед повною зупинкою і знизити динамічні зусилля на канати, що можуть виникнути, коли один кінець каната на органі навивки застопорений гальмом, а іншої, з прикріпленим вантажем, вільний. Недоліками способу є обмежена область застосування тільки для моменту зупинки, а також складність його здійснення, пов'язана з необхідністю визначення великої кількості параметрів руху, обчислення величини ступеня гальмування і моменту часу для її накладення. Відомий також патент RU 2342309 з назвою "Спосіб гальмування підіймальних машин" МПК В66В1/24, В66В1/32, B66D5/00 [3]. Задачею способу, є зменшення динамічних зусиль у канаті при запобіжному гальмуванні. Досягається це за рахунок того, що послідовно з витримкою в часі включають перший і другий ступені гальмового зусилля, причому другий ступінь включають із затримкою за часом на ціле число плюс половина періоду подовжніх коливань каната, викликаних включенням першого ступеня. При рівності гальмових зусиль першого і другого ступенів спосіб після включення другого ступені дозволяє цілком ліквідувати подовжні коливання вантажного каната, оскільки за час затримки їх можна точно вимірити. Недоліком способу є наявність суттєвих динамічних зусиль у системі каната до включення другого ступеня, низька точність і ефективність, які залежать від точності виміру періоду і вибору часу включення другого ступеня. Спосіб має вузьку область застосування, що обмежена умовами, коли час гальмування порівнянний з періодом коливань, і можливістю його виміру під час дії першого ступеня. Досвід досліджень промислових систем автоматично регульованого запобіжного гальмування на підіймальних установках глибиною до 1000 м [4], показав, що для глибини 450 м час періоду подовжніх коливань каната з вантажем 14 т складає 1.7 с Правилами безпеки експлуатації підіймальних установок час спрацьовування гальма (від початку гальмування до моменту, коли гальмове зусилля дорівнюється статичному навантаженню на канаті) обмежений 0.8 с. При запобіжному гальмуванні на спуску вантажу зі швидкістю 4 м/с із 2 заданим уповільненням 1.2 м/с час запобіжного гальмування складає 3.7 с, що відповідає двом періодам подовжніх коливань і не задовольняє умовам здійснення способу. При збільшенні глибини підйому буде збільшуватись і період коливань каната. Іншим недоліком способу є те, щопісля двоступінчастого гальмування пружної системи підйому, при зупинці підіймальної машини відбувається третій природний ступінь, що полягає в стрибкоподібній зміні уповільнення від гальмового моменту другого ступеня до нуля при зупинці. Це створює умови для виникнення подовжніх коливань каната, один кінець якого зафіксований через орган навивки гальмом, а другий з вантажем вільний. В основу винаходу поставлена задача удосконалення способу впливу на привод гальма, що враховує частотні параметри пружної системи підйому (канати і маси, що рухаються) з метою підвищення енергетичної ефективності, швидкодії і зниження динамічних зусиль від перерозподілу механічної енергії в пружній частині системи під час гальмування і після зупинки підіймальної машини. Рух будь-якої системи, характеризується зміною координат руху: переміщення, швидкості, прискорення (уповільнення), ривку тощо. Координати функціонально зв'язані між собою в часі природною похідною залежністю. Запобігти перерозподілу енергії в системі з реактивними властивостями можна раціональними впливами по кожній координаті, що спрямовані на компенсацію реактивних властивостей. 1 UA 114179 C2 Поставлена задача вирішується тим, що у способі гальмування підіймальних машин, де на привід гальма діють сукупністю керуючих впливів, які послідовно перемикають протягом часу, що співвідноситься з періодом подовжніх коливань пружної системи, відповідно до винаходу, зазначену сукупність керуючих впливів здійснюють по закону впливу на привід гальма 5 ' U fг (t ) U fг 3 (t ) U 'fг 3 (t ) U 'fг 3 (t ) , де U fг 3 (t ) - функція зміни гальмового зусилля, U 'fг 3 (t ) та ' U 'fг 3 (t ) - приведені до функції зміни гальмового зусилля, відповідно, її перша і друга похідні, 10 при цьому функцію зміни гальмового зусилля, її першу та другу похідні визначають в залежності від заданого закону керування, частотних параметрів подовжніх коливань та динамічних параметрів приводу гальма. Поставлена задача вирішується також тим, що зазначену першу похідну, приведену до функції зміни гальмового зусилля, визначають з залежності U fг 3 (t ) 2 2 2 ' U 'fг 3 (t ) 4 U 'fг 3 (t )dt U ' fг 3 , а функцію (t )dt зміни гальмового зусилля - з залежності , де і - параметри частоти й коефіцієнта демпфірування подовжніх коливань пружної системи підйому. Поставлена задача вирішується також тим, що зазначену другу похідну, приведену до U 15 '' fг 3 U fг1m при D - (t ) 0 при D U fг1m при D функції зміни гальмового зусилля, визначають з залежності шляхом нелінійного посилення й обмеження рівнем U fг1m функції порівняння D(t) заданого закону керування з визначеними функціями зміни гальмового зусилля й приведених до неї її першої похідної Dt Uc (t ) U fг 3 (t ) K fг 2U 'fг 3 (t ) , де - припустима похибка порівняння; dFг t max dt - максимальне значення похідної функції гальмового зусилля; D результат порівняння миттєвих значень функції порівняння Dt ; U c (t ) - функція заданого U fг1m 20 K fг 2 K cU cm закону керування; 2 2 2 2U fг1m ; Kc коефіцієнт пропорційності; U cm максимальна амплітуда функції керування. Поставлена задача вирішується також тим, що при запобіжному гальмуванні контролюють швидкість руху 25 v t dvt 0 Fг Fст dt підіймальної машини й при , коли визначають Fг Fгн Fcт збільшення гальмового зусилля до отримання заданого уповільнення, а при v Fг , і при досягненні мінімальної швидкості m in гальмове зусилля зменшують на величину v 0 накладають максимальне гальмове зусилля, де F , F й F - відповідно статичне ст г гн 30 35 навантаження, поточне й номінальне гальмове зусилля. Поставлена задача вирішується в такий спосіб. На основі довільної функції керування в часі визначається вплив у вигляді послідовності дій на привод, який враховує динамічні параметри привода, пружної системи і направлений на запобігання виникненню перехідних процесів, пов'язаних з перерозподілом і розсіюванням механічної енергії. Закон впливу представляє суму з трьох функцій-координат: функції зміни гальмового зусилля, його першої і другої похідних, що описують рух системи привода і пружної системи. Усі функції-координати жорстко зв'язані між собою, визначені й обмежені. Тому дії на привод ефективно запобігають умові перерозподілу енергії між масами, що рухаються, і пружними елементами в системі підйому. Це підвищує енергетичну ефективність і швидкодію, зменшує динамічні перевантаження в системі канатів і іншім устаткуванні, поліпшує безпеку експлуатації і подовжує ресурс роботи устаткування. 2UA 114179 C2 5 10 Суть способу пояснюється блок-схемою алгоритму дій, на Фіг. 1. Схема містить блоки: функціональний перетворювач, що включає команд-апарат функції керування, завдання частотних параметрів системи, датчика швидкості (1); блок констант і коефіцієнтів (2); блок арифметичного обчислення різниці (3); блок визначення функції-координати другої похідної від функції зміни гальмового зусилля, обмеженої по амплітуді динамічними властивостями привода гальма (4); блок визначення координати першої похідної функції зміни гальмового зусилля (5); блок визначення координати функції зміни гальмового зусилля (6); блок алгебраїчного підсумовування - визначення закону гальмового зусилля (7). Спосіб полягає в наступній послідовності дій. У блоці (3) обчислюється різниця між заданою U c t функцією керування його першої похідної, пружної системи, максимальною і сумою визначених функцій-координат: гальмового зусилля, і U fг 2 (t ) U (t ) , з коефіцієнтом, що враховує частотні властивості ' fг 3 обмеження, внесені амплітудою динамічними сигналу 2 2 U ' fг 3 t 2 2 U fг1m Dt U c t U fг 3 t K cU cm 15 U fг3 t , де властивостями привода гальма і функції керування, частота, коефіцієнт демпфірування пружної системи, U cm - максимальне значення функції керування відповідному K c 1 - масштабний коефіцієнт пропорційності для обмеження dU Fa t U fг1m max dt динамічної похибки, - величина обмеження по амплітуді другої похідної гальмовому зусиллю, зміни гальмового зусилля динамічними параметрами привода (при збільшенні і зменшенні гальмового зусилля). Результат обчислення є другою похідною функцій зміни гальмового 20 зусилля, U fг1 (t ) U наприклад, " fa 3 U fг1m при D (t ) 0 при D , де - припустима похибка порівняння, U fг1m при D 0.05 0.2 . Визначення координати U fm1 (t ) , що обмежена по амплітуді рівнем U fa1m підвищує завадостійкість способу і запобігає виникненню динамічних явищ, що можуть U t c мати місце при різких змінах функції керування . З урахуванням частотних параметрів пружної системи підйому блок (5) обчислює першу похідну функції зміни гальмового зусилля 25 U fг 3 (t ) U ' fг 3 (t ) 4 U " fг 3 (t )dt приведені , блок (6) - другу координати гальмового до 2 2 U ' fг 3 (t )dt 2 . зусилля, а Усі координати їх сума U fг (t ) U fг1 (t ) U fг 2 (t ) U fг 3 (t ) U " fг 3 (t ) U ' fг 3 (t ) U fг 3 (t ) у блоці (7) визначає закон впливу на привод гальма. Результати застосування способу різними функціями керування представлені на Фіг. 3, 4, 5. 30 T 1.54 c , Прийняті частотні параметри: 2 4.08 c 1 0.079 c 1 , коефіцієнти й T , обмеження максимальної амплітуди функції керування і максимальної похідної зміни гальмового зусилля: 5 Ucm 1000 35 K c 0 .2 K 0 .2 , U cm 10 1 U 5 , U fг1m 10 (наприклад, при можливих діапазонах K 1 5 U 1000 fг1m cm c c , , , . На Фіг. 3 представлені діаграми перехідних процесів пружної системи підйому, реакції на одиничну функцію керування і з застосуванням даного способу. Позначення на всіх кресленнях співпадають з описом в тексті. На Фіг. 4 і 5 приведені перехідні процеси в пружній системі, відповідно, при багатоступінчастій функції керування і, якщо вона плавно змінюється. Оскільки параметр величини демпфірування значно меншій частоти коливань системи, , то вплив його не значний. Тому цей параметр може бути прийнятий постійним, 3 UA 114179 C2 5 10 наприклад, (0.01...0.5) . При цьому внесена похибка і динамічні зусилля від неї будуть несуттєвими. При завершенні процесу запобіжного гальмування підіймальної машини одна частина каната фіксується гальмом, через орган навивки, а інша з вантажем, вільна, що при стрибкоподібній зміні гальмового зусилля до нуля створює в пружній системі умови виникнення динамічних зусиль і коливань. Для зменшення після зупинки амплітуд динамічних зусиль у канаті, в процесі гальмування контролюється швидкість руху підіймальної машини. При спуску вантажу, знак статичного навантаження протилежний знаку гальмового зусилля, тому під час холостого ходу гальма перевага статичного навантаження Fcm збільшує швидкість підіймальної машини. Гальмове зусилля збільшується і при досягненні Fг Fcm dvt 0 dt , . Подальший Fг Fг ном Fсm приріст гальмового зусилля до номінального значення визначається перераховується з відповідним коефіцієнтом у величину частини керуючого , сигналу і запам'ятовується. При досягненні безпечної мінімальної швидкості vm in (на U cfг Fcfг Fг / K fг практиці приймається, наприклад, 0.5-0.7 м/с), гальмове зусилля через сигнал 15 20 зменшується на U г , до значення близько Fcm . Це зменшує уповільнення (кут нахилу F t при діаграми швидкості до осі часу) і як наслідок зменшує амплітуди пружних зусиль ї досягненні v 0 . Після зупинки підіймальної машини накладається максимальне гальмове зусилля. Робота даної частини способу пояснюється блок-схемою алгоритму дій на Фіг. 2, а діаграми результатів представлені на Фіг. 6. Для наочності діаграми модельовані для підіймальної установки без компенсації інерційних властивостей пружної частини підйому. Представлені v t F t F t г n діаграми , , : швидкості руху підіймальної машини, гальмового зусилля і пружного зусилля в точці сполучення каната з органом навивки каната (шківом тертя) v * t F * t F * t 25 30 35 40 підіймальної машини (ліфта). Діаграми , г , п відповідають діаграмам режиму звичайної роботи. Масштаби діаграм умовні. Спосіб запобігає перерозподілу механічної енергії в системі і надає їй аперіодичні властивості. Функції-координати, що визначають послідовність впливу на інерційну систему, жорстко зв'язані між собою природними залежностями й обмежені по амплітуді. Тому, незалежно від характеру функції керування забезпечується завадостійкість, швидкодія, безпека системи, запобігаються динамічні перевантаження і подовжується ресурс устаткування. Джерела інформації: 1. А.С. № 1447743 (СССР) Устройство для управления приводом шахтной подъемной машины/ Васильев В.И., Дубовик В.Г., Чермалых В.М. Опубл. 30.12.1988. Бюл. № 48. 2. А.с. № 1346552 (СССР) Способ предохранительного торможения подъемной машины/ Степанов А.Г., Клименков Г.B., Яруллин Ш.К. и Шабалин В.Н. Опубл. 23.10.1987. Бюл. № 39. 3. Патент РФ № 2342309 Способ торможения подъемных машин/ Либерман Я.Л., Горбунова Л.Н., Баранов В.А. Опубл. 27.12.2008. Бюл. № 36. 4. Протокол осциллографирования режимов предохранительного торможения подъемной машины 1 × 3х2У с АРПТ к "Акту приемки комплекса автоматически регулируемого предохранительного торможения шахтных подъемных машин (АРПТ)". ПО Донецкгормаш. Донецк, 13.09.1983 г. ФОРМУЛА ВИНАХОДУ 45 1. Спосіб гальмування підіймальних машин, де на привід гальма діють сукупністю керуючих впливів, які послідовно перемикають протягом часу, що співвідноситься з періодом подовжніх коливань пружної системи, який відрізняється тим, що зазначену сукупність керуючих впливів здійснюють по закону впливу на привід гальма ' U fг (t ) U fг 3 (t ) U 'fг 3 (t ) U 'fг 3 (t ) , де U fг 3 (t ) 4 UA 114179 C2 функція зміни гальмового зусилля, 5 ' U 'fг 3 (t ) та U 'fг 3 (t ) - приведені до функції зміни гальмового зусилля, відповідно, її перша і друга похідні, при цьому функцію зміни гальмового зусилля, її першу та другу похідні визначають в залежності від заданого закону керування, частотних параметрів подовжніх коливань та динамічних параметрів приводу гальма. 2. Спосіб за п. 1, який відрізняється тим, що зазначену першу похідну, приведену до функції зміни гальмового зусилля, визначають з залежності U fг 3 (t ) 4 U fг 3 (t )dt , а функцію зміни ' гальмового зусилля - з залежності U fг 3 (t ) '' 2 2 ' U fг 3 (t )dt , де і - параметри частоти 2 й коефіцієнта демпфірування подовжніх коливань пружної системи підйому. 3. Спосіб за п. 1, який відрізняється тим, що зазначену другу похідну, приведену до функції 10 U fг1m при D - '' зміни гальмового зусилля визначають з залежності U fг 3 (t ) 0 при D шляхом U fг1m при D нелінійного посилення й обмеження рівним U fг1m функції порівняння D(t) заданого закону керування з визначеними функціями зміни гальмового зусилля й приведених до неї її першої Dt Uc (t ) U fг 3 (t ) K fг 2U 'fг 3 (t ) , де - припустима похибка порівняння; dF t U fг1m г max - максимальне значення похідної функції гальмового зусилля; D dt результат порівняння миттєвих значень функції порівняння Dt ; U c (t ) - функція заданого похідної 15 закону керування; K fг 2 K cU cm 2 2 2 2U fг1m ; Kc коефіцієнт пропорційності; U cm максимальна амплітуда функції керування. 4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що при запобіжному гальмуванні контролюють швидкість руху v t підіймальної машини й при 20 визначають збільшення гальмового зусилля Fг Fгн Fcт уповільнення, а при досягненні мінімальної швидкості величину vmin dvt 0 , коли Fг Fст dt до отримання заданого гальмове зусилля зменшують на Fг , і при v 0 накладають максимальне гальмове зусилля, де Fст , Fг й Fгн відповідно статичне навантаження, поточне й номінальне гальмові зусилля. 5 UA 114179 C2 6 UA 114179 C2 7 UA 114179 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66B 5/16, H02P 3/06, B66B 1/32, B66B 1/30, B66B 1/24
Мітки: гальмування, підіймальної, шахтної, установки, спосіб
Код посилання
<a href="https://ua.patents.su/10-114179-sposib-galmuvannya-shakhtno-pidijjmalno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб гальмування шахтної підіймальної установки</a>
Пристрій управління запобіжним гальмом підіймальної машини
Номер патенту: 5617
Опубліковано: 28.12.1994
Автори: Григор'єв Валерій Васильович, Бєліков Микола Лаврентійович
МПК: F15B 11/00, B66B 5/16
Мітки: підіймальної, пристрій, запобіжним, машини, гальмом, управління
Текст:
...з'єднана з виходів двохпозиційного трьохлінійного розподільника блоку відпрацювання параметрів першого і другого ступенів галь- 35 мування, згідно з винаходом має функціональний блок швидкості І редукційний клапан, який з'єднаний своїм входом до джерела тиску, а виходом - до входу розподільника блоку відпрацювання 40 параметрів першого І другого ступенів гальмування, сполученного другим своїм виходом о атмосферою І виконаним з...
Система управління електродвигуном для приводу тросового барабана шахтної підіймальної машини і тросової системи
Номер патенту: 26520
Опубліковано: 11.10.1999
Автори: Шмітт Вінфрід Е., Грінуей Малколм Ернест
МПК: B66B 1/00
Мітки: електродвигуном, барабана, системі, машини, система, тросової, підіймальної, управління, шахтної, приводу, тросового
Формула / Реферат:
1. Система управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы, включающей в себя транспортное средство, поддерживаемое тросом, и образующей колебательную систему, содержащая датчик нагрузки, предназначенный для постоянного контролирования нагрузки на трос и для посылки соответствующего сигнала нагрузки, датчик длины троса, постоянно контролирующий длину троса, сматываемого с тросового...
Спосіб включення сигналів гальмування транспортного засобу в разі відмови датчика включення сигналів гальмування
Номер патенту: 67064
Опубліковано: 25.01.2012
Автор: Сікоринський Віталій Валерійович
МПК: B60Q 1/44
Мітки: спосіб, відмові, транспортного, разі, гальмування, включення, датчика, сигналів, засобу
Формула / Реферат:
1. Спосіб включення сигналів гальмування транспортного засобу за рахунок дії електричного струму керування на реле включення сигналів гальмування, який відрізняється тим, що на реле включення сигналів гальмування діють електричним струмом керування, який спрямовують через електричний дріт керування, штекери входу і виходу лівого блока контрольних ламп, діод, комутаційний пристрій з кнопкою та додаткову контрольну лампу.2. Спосіб...
Спосіб роботи резонансної шахтної підйомної установки
Номер патенту: 74621
Опубліковано: 16.01.2006
Автори: Дворников Володимир Іванович, Кърцелин Евтим Руйгов, Дворников Михайло Володимирович, Пристром Володимир Адольфович, Грядущий Борис Абрамович
МПК: B66B 1/06
Мітки: резонансної, підйомної, роботи, спосіб, установки, шахтної
Формула / Реферат:
Спосіб роботи шахтної підйомної установки, що забезпечує регулювання електропривода, який приводить в дію підйомну машину, головні канати, зрівноважувальні канати та інші рухомі елементи, в тому числі підвісні посудини - скіп або кліть, який відрізняється тим, що різниця погонних мас, відповідно зрівноважувальних і головних
Гідроопора аварійно-рятувальної пересувної підіймальної машини
Номер патенту: 51947
Опубліковано: 16.12.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21F 11/00
Мітки: пересувної, машини, підіймальної, гідроопора, аварійно-рятувальної
Формула / Реферат:
Гідроопора аварійно-рятувальної пересувної підіймальної машини, що включає гідроциліндр двобічної дії, опорну плиту, яка відрізняється тим, що є частиною конструкції рами, має гідрозамок, який забезпечує фіксацію штока гідроциліндра у заданому положенні, а також має постійно закріплену на штоковій кульовій опорі плиту з пристроєм, що запобігає прокручуванню плити при транспортуванні.
Попередній патент: Комбінація, що включає інгібітор cdk4/6 і інгібітор pi3k, для лікування раку
Наступний патент: Електронний ігровий та/або розважальний пристрій
Випадковий патент: Машина для усунення ожеледі з контактного проводу