Пристрій робочої станції для проведення експериментів в космосі
Номер патенту: 20353
Опубліковано: 15.09.2000
Автори: Дем"яненко Володимир Васильович, Перепеченко Борис Іванович, Морейніс Михайло Йосипович, Булацев Олександр Ратмирович, Гавриш Сергій Семенович, Любомудров Ігор Георгійович, Загребельний Олександр Айзикович, Крюков Валерій Анатолійович, Патон Борис Євгенович, Марков Олександр Вікторович
Формула / Реферат
1. Устройство рабочей станции для проведения экспериментов в космосе, содержащее раму и рабочее место космонавта, отличающееся тем, что рама содержит основание с направляющей, и поручень с держателем, имеющий не менее двух гнезд, оснащенных защелками для фиксации блока сменных образцов и механизмом торможения, а рабочее место космонавта смонтировано на направляющей с возможностью перемещения по ней.
2. Устройство рабочей станции для проведения экспериментов в космосе по п.1, отличающееся тем, что рабочее место космонавта содержит: основание с вертикальной стойкой; рукоятку с клавишами управления перемещением, вращением и усилием прижатия ног космонавта, установленную в упомянутой стойке; ролики с шестеренчатыми венцами, смонтированные на нижней поверхности основания для перемещения вдоль направляющей рамы и кинематически связанные посредством системы тяг с упомянутой рукояткой с клавишами для управления продольным перемещением рабочего места космонавта; поворотную платформу, смонтированную на верхней поверхности основания посредством опорного подшипника, содержащего на наружной обойме зубчатое колесо, кинематически связанное посредством подпружиненного рычага и системы тяге вышеупомянутой рукояткой с клавишами для управления вращением поворотной платформы с космонавтом, причем поворотная платформа имеет скобы для фиксации ног космонавта, кинематически связанные с упомянутой рукояткой с клавишами для управления прижатием ног космонавта.
3. Устройство рабочей станции для проведения экспериментов в космосе по п.2, отличающееся тем, что скобы для фиксации ног космонавта выполнены в виде кривошипов с цилиндрическими пружинами, при этом ось вращения кривошипов перпендикулярна оси вращения платформы.
4. Устройство рабочей станции для проведения экспериментов в космосе по п.1, отличающееся тем, что основание рамы и поручень с держателем соединены между собой посредством по меньшей мере двух шарнирных соединений с защелкивающимися замками, оси которых выполнены с эксцентриситетом для выборки люфта после срабатывания.
Текст
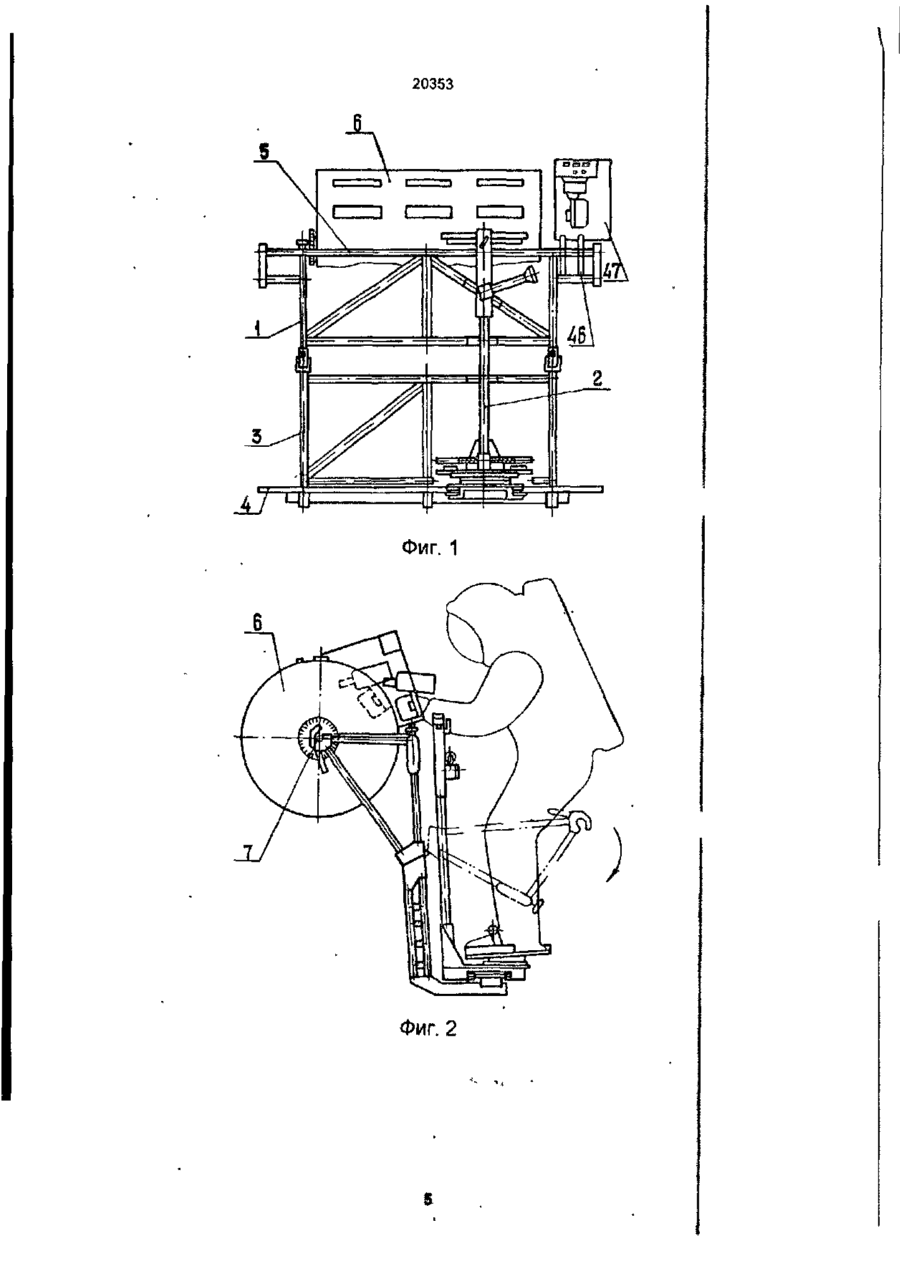
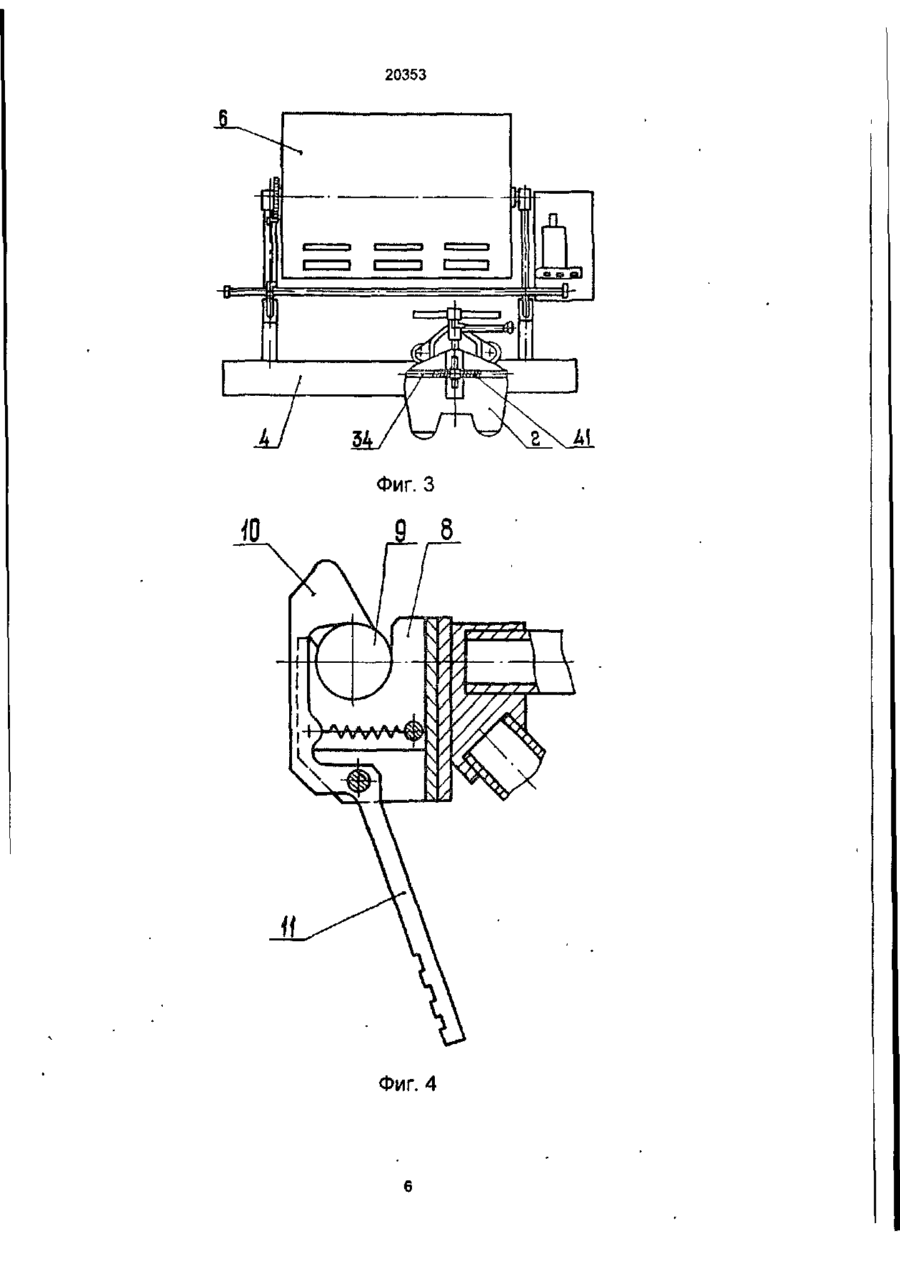
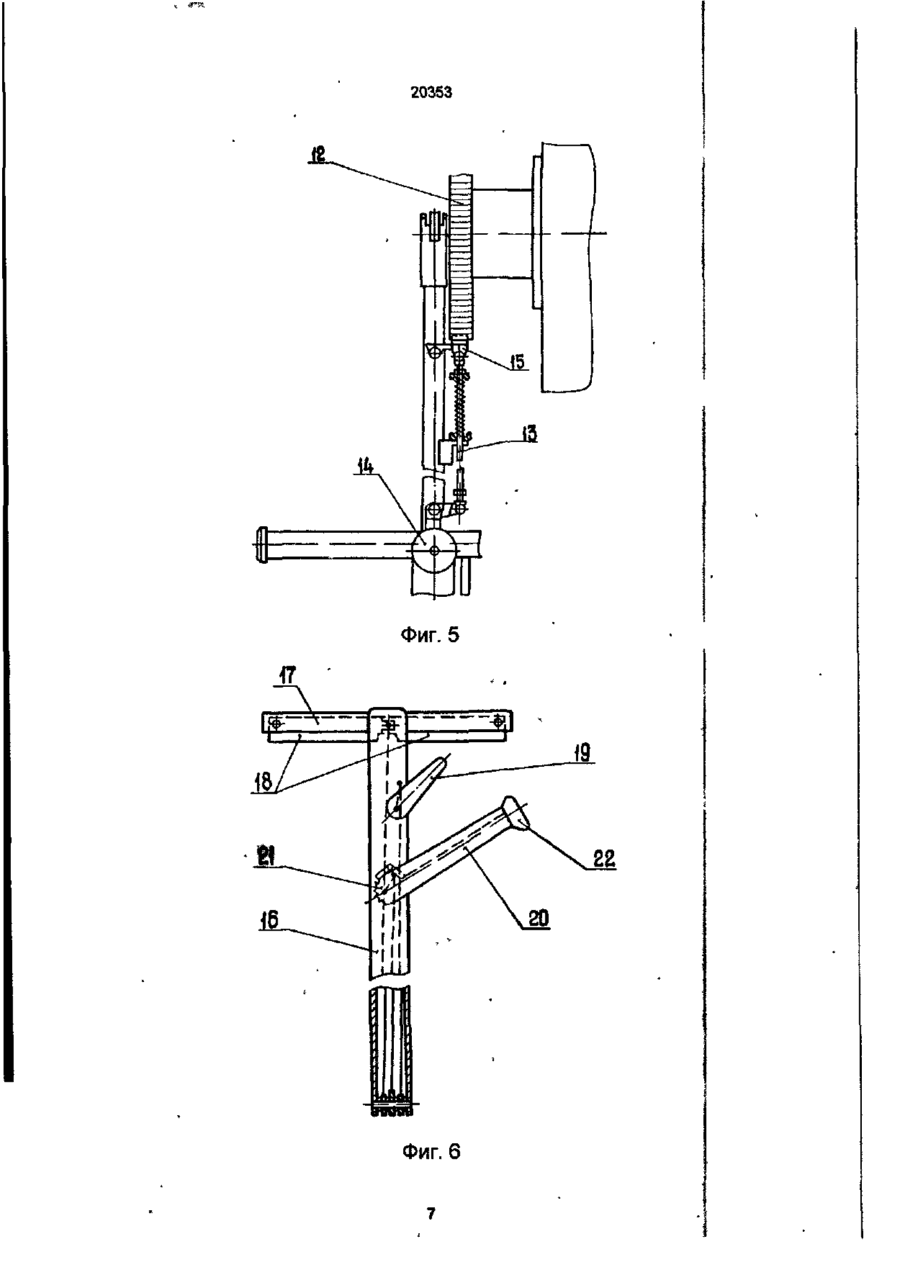
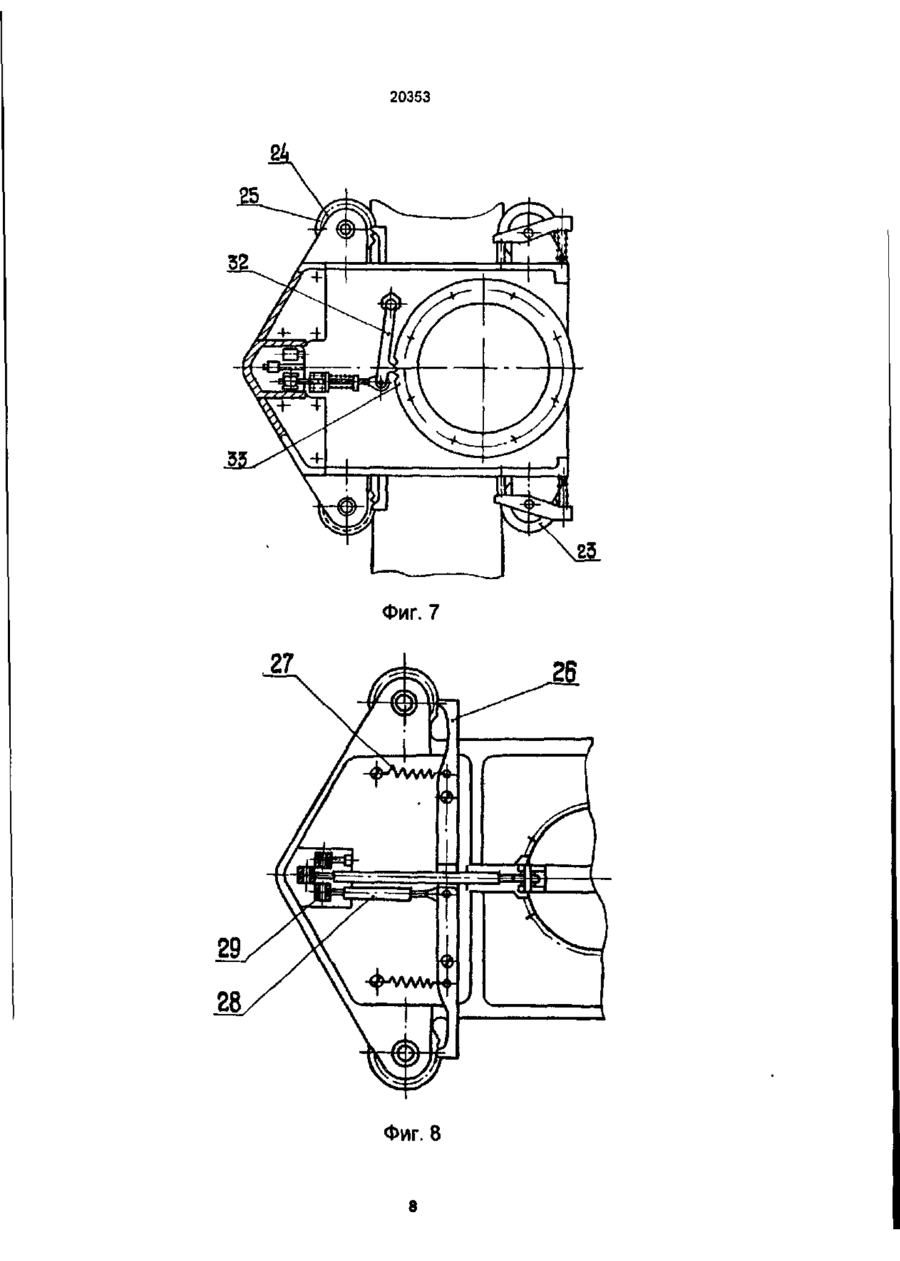
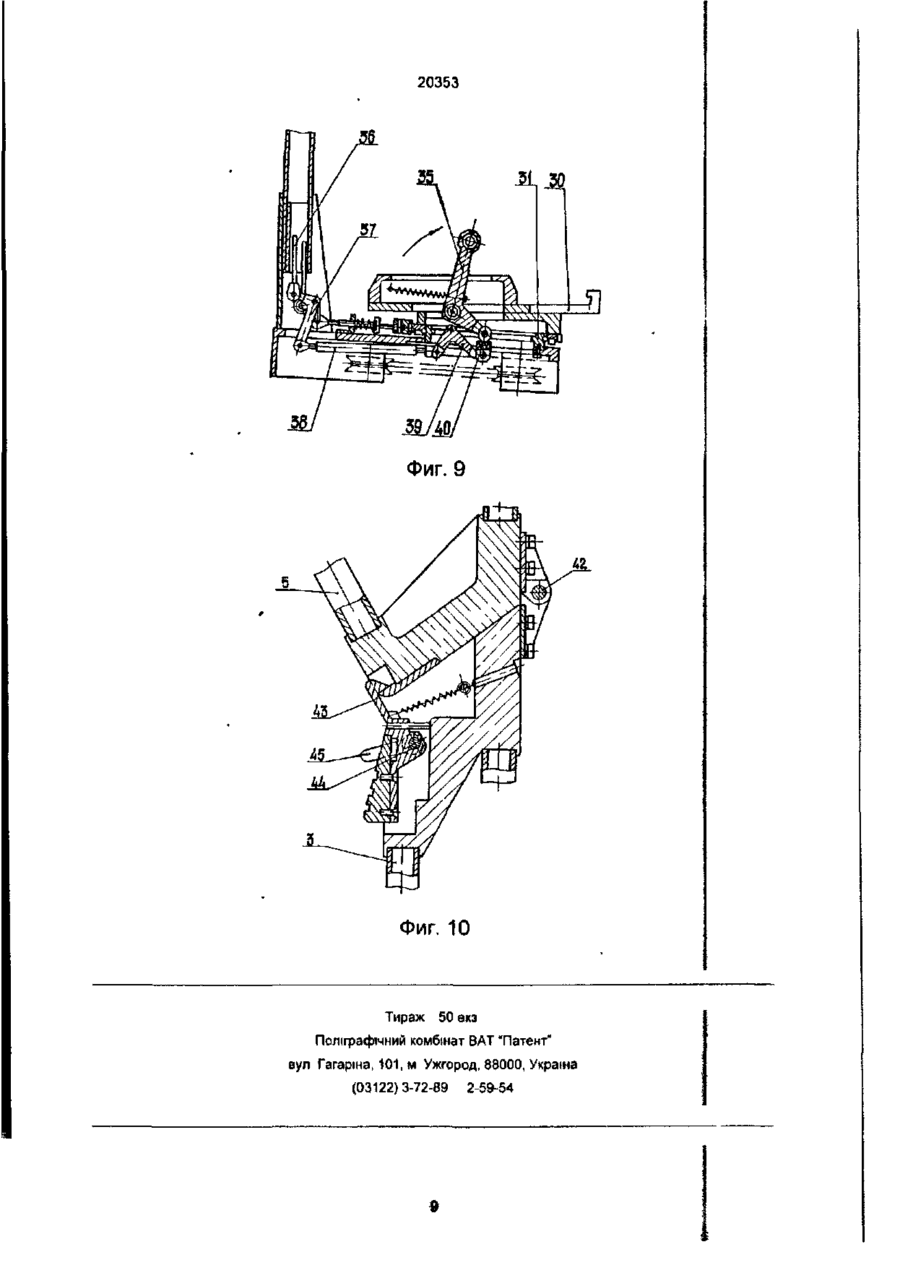
УКРАЇНА (19) UA (11,20353 (із, С2 (51, 6 B64G9/00 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОПИС ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ДО ПАТЕНТУ НА ВИНАХІД (54) ПРИСТРІЙ РОБОЧОЇ СТАНЦІЇ ДЛЯ ПРОВЕДЕННЯ ЕКСПЕРИМЕНТІВ В КОСМОСІ (21,95020653 (22)14 02 1995 {24)15 09 2000 (46) 15 09 2000, Бюл № 4, 2000 р (72) Патон Борис Євгенович, Булацев Олександр Ратмирович, Перепеченко Борис Іванович, Морейню Михайло Йосипович, Загребельний Олександр Айзикович, Марков Олександр Вікторович, RU, Любомудров'Ігор Георгійович, Крюков Валерій Анатолійович, Дем'яненко Володимир Васильович, Гавриш Серпй Семенович (73) Інститут електрозварювання ім Є О.Патона Національної академії наук України (56) 1. Журнал «Наука и жизнь», № 2,1986 г 2 Инженерная психология в авиации и космонавтике Машиностроение, 1972, стр 224, 229 (прототип) (57,1. Устройство рабочей станции для проведения экспериментов в космосе, содержащее раму и рабочее место космонавта, отличающееся тем, что рама содержит основание с направляющей и поручень с держателем, имеющий не менее двух гнезд, оснащенных защелками для фиксации блока сменных образцов и механизмом торможения, а рабочее место космонавта смонтировано на направляющей с возможностью перемещения по ней 2 Устройство рабочей станции для проведения экспериментов в космосе по п 1. отличающееся тем, что рабочее место космонавта содержит основание с вертикальной стойкой, рукоятку с клавишами управления перемещением, вращением и усилием прижатия ног космонавта, установленную _ Настоящее изобретение относится к вспомогательному оборудованию, устанавливаемому на борту космических объектов в открытом космосе, а точнее к устройству рабочей станции для проведения экспериментов в космосе Устройство предназначено для закрепления на внешней поверхности долговременной орбитальной космической станции типа «Мир», либо в грузовом отсеке транспортного многоразового аппарата типа "Shuttle" Изобретение может быть с успехом использовано при проведении космонавтом, сі в скафандр, экспериментов, исследований,^технологий и материалов в УПОМЯНУТОЙ стойке, ролики с шестеренчатыми венцами, смонтированные на нижней поверхности основания для перемещения вдоль направляющей рамы и кинематически связанные посредством системы тяг с УПОМЯНУТОЙ рукояткой с клавишами для управления продольным перемещением рабочего места космонавта, поворотную платформу, смонтированную на верхней поверхности основания посредством опорного подшипника, содержащего на наружной обойме зубчатое колесо, кинематически связанное посредством подпружиненного рычага и системы тяг с вышеупомянутой рукояткой с клавишами для управления вращением поворотной платформы с космонавтом, причем поворотная платформа имеет скобы для фиксации ног космонавта, кинематически связанные с упомянутой рукояткой с клавишами для управления прижатием ног космонавта 3 Устройство рабочей станции для проведения экспериментов в космосе по п 2, отличающееся тем, что скобы для фиксации ног космонавта выполнены в виде кривошипов с цилиндрическими пружинами, при этом ось вращения кривошипов перпендикулярна оси вращения платформы 4 Устройство рабочей станции для проведения экспериментов в космосе по п.1, отличающееся тем, что основание рамы и поручень с держателем соединены между собой посредством, по меньшей мере, двух шарнирных соединений с защелкивающимися замками, оси которых выполнены с эксцентриситетом для выборки люфта после срабатывания Одной из важных проблем в космосе является перемещение человека в пространстве в условиях невесомости Отсутствие силы тяжести существенно изменяет координацию и характер движений человека при взаимодействии с окружающими его предметами, заставпяет перестроить многие привычные двигательные акты и по-новому распределить мышечные усилия Нужно обладать высокоразвитыми механизмами координации движений, чтобы совершать целенаправленные движения и выполнять рабочие операции r-^r-flm-расширения функций космонавта в открытом космосе возникла проблема создания устраїючих станций с органами управления фонду експертизи О СО ю со 20353 перемещением, торможения вращений и фиксации ног космонавта Причем, из-за трудностей управления обычными ручками потребовалось создание устройств с клавишным управлением Известно устройство для фиксации ног, закрепляющее космонавта и обеспечивающее работоспособность в условиях открытого космоса [1] Это устройство содержит рабочее место космонавта, выполненное в виде подножки - «якоря», содержащего специальные стационарные опорные платформы для ног со скобами, заранее отрегулированными по высоте и фиксирующие иоски сапог скафандра Кроме этого, на пятке сапога имеется шпора, для которой на устройстве установлено специальное гнездо с защелкой Это устройство может быть установлено как внутри, так и снаружи космического корабля для работы с различными приборами и оборудованием Такое устройство не может быть эффективно использовано для проведения экспериментов и исследований технологий в условиях открытого космоса, т к в нем нет средств для смены исследуемых образцов и возможности перемещения космонавта вдоль рабочей зоны Кроме того при постановке носка сапога скафандра в скобу, а шпоры в гнездо развиваются большие усилия, которые передаются через узлы крепления опорной платформы на объект Аварийное покидание рабочего места затруднено, т к зацепление за гнездо шпорой и определенное положение ноги в скобе требуют для извлечения ноги определенных усилий и затрат времени Известно устройство рабочей станции для проведения экспериментов в космосе [2] (прототип), содержащее раму в виде рельсов, по которой перемещается рабочее место космонавта, выполненное и виде герметичной монтажной капсулы В передней части капсулы располагается иллюминатор осмотра и несколько наружных дистанционно-управляемых манипуляторов При работе на поверхности корабля капсула может крепиться к кораблю с помощью внешних рельсов Основным недостатком такого устройства является то, что космонавт, располагаясь в монтажной капсуле, не имеет возможность осуществлять быструю смену обрабатываемых образцов, свободно перемещаться вдоль рамы и вокруг своей оси, быстро покидать рабочее место в аварийной ситуации В основу изобретения положена задача создать такое устройство рабочей станции для проведения экспериментов в космосе, которое за счет нового конструктивного выполнения рамы и рабочего места космонавта позволило бы размещать на раме приборы и аппаратуру, например, электронно-лучевую осуществлять быструю смену обрабатываемых образцов, а космонавт, располагаясь на рабочем месте, имел бы возможность свободно перемещаться вдоль рамы и вокруг своей оси с возможностью управления своим движением с помощью рукояток с клавишами управления и иметь возможность быстро покидать рабочее место в аварийной ситуации Эта задача решена тем, что предложено устройство рабочей станции для проведения экспериментов в космосе, содержащее раму и рабочее место космонавта, в котором рама содержит осно вание с направляющей, по которой перемещается на роликах рабочее место космонавта и поручень с держателем, имеющий не менее двух гнезд, оснащенных защелками для фиксации блока сменных образцов Рабочее место космонавта содержит основание с вертикальной стойкой, рукоятку с клавишами управления перемещением, вращением и усилием прижатия ног космонавта, установленную в упомянутой стойке ролики с шестеренчатыми венцами, смонтированные на нижней поверхности основания для перемещения вдоль направляющей рамы и кинематически связанные посредством системы тяг с упомянутой рукояткой с клавишами для управления продольным перемещением рабочего места космонавта, поворотную платформу, смонтированную на верхней поверхности основания посредством опорного подшипника, содержащего на наружной обойме зубчатое колесо, кинематически связанное посредством подпружиненного рычага и системы тяг с вышеупомянутой рукояткой с клавишами для управления вращением поворотной платформы с космонавтом, причем поворотная платформа имеет скобы для фиксации ног космонавта, кинематически связанные с упомянутой рукояткой с клавишами для управления прижатием ног космонавта Скобы для фиксации ног космонавта выполнены в виде кривошипов с цилиндрическими пружинами, при этом ось вращения кривошипов перпендикулярна оси вращения платформы Основание рамы и поручень с держателем соединены между собой посредством, по меньшей мере, двух шарнирных соединений с защелкивающимися замками, оси которых выполнены с эксцентриситетом для выборки люфта после срабатывания Такое выполнение устройства позволило устранить недостатки прототипа Для осуществления быстрой смены обрабатываемых образцов рама снабжена гнездами с защелками, позволяющими легко фиксировать и снимать данное оборудование Для перемещения рабочего места вдоль рамы на ней имеется направляющая, а на тележке рабочего места - подпружиненные ролики с тормозом Для поворота космонавта вокруг своей оси на тележке рабочего места имеется платформа с тормозом Для фиксации ног космонавта на рабочем месте космонавта имеются фиксирующие скобы, выполненные в виде кривошипов и рукоятка с храповым механизмом для регулирования усилия прижатия ног а для быстрого покидания рабочего места в аварийной ситуации фиксирующие скобы выполнены упругими На прилагаемом чертеже фиг 1 изображен главный вид заявляемой рабочей станции для проведения экспериментов в космосе, фиг 2 - изображен вид сбоку заявляемой рабочей станции для проведения экспериментов в космосе, фиг 3 - изображен вид сверху заявляемой рабочей станции для проведения экспериментов в космосе, фиг 4 - изображено гнездо с защелкой для 20353 фиксации блока сменных образцов; фиг. 5 - изображено зубчатое колесо блока сменных образцов с язычковым тормозом; фиг. б - изображена вертикальная стойка рабочего места космонавта с органами управления; фиг.7 - изображена тележка рабочего места космонавта; фиг. в - изображена тележка рабочего места космонавта, вид снизу; фиг. 9 - изображен разрез рабочего места космонавта; фиг. 10 - изображен шарнир с замком, соединяющий поручень и основание рамы. Предлагаемое устройство рабочей станции для проведения экспериментов в космосе состоит из рамы 1 и рабочего места космонавта 2 (фиг. 1, 2, 3). Нижняя часть рамы включает в себя основание с направляющей 3 для перемещения по ней рабочего места космонавта Верхняя часть рамы, именуемая поручнем с держателем, представляет собой трубу 4 с гладкой поверхностью и торцевыми накладками 5, позволяющими космонавту удерживаться за них в крайних положениях. Для крепления на раме блока сменных образцов 6 (фиг. 3), либо других обрабатываемых объектов, имеются два гнезда 7 (фиг. 2), чредставленных на фиг. 4. Гнездо состоит из ложемента 8, куда вставляется ось -блока сменных образцов 9 и подпружиненной защелки 10 с рукояткой 11. Защелка препятствует выходу оси из ложемента до . нажатия на рукоятку. На фиг. 5 представлен механизм торможения блока сменных образцов. На блоке сменных образцов имеется зубчатое колесо 12, которое позволяет посредством тяги 13 и рукоятки 14, связанных с подпружиненным язычком 15, выбрать космонавту любое удобное положение блока сменных образцов при их обработке. Рабочее место космонавта 2 предназначено для фиксации ног космонавта, его перемещения вдоль рамы по направляющей и поворота вокруг собственной оси. Рабочее место космонавта имеет основание, поворотную платформу и вертикальную стойку 16 (фиг. 6), оснащенную рукояткой 17 с двумя дублирующими друг друга клавишами 18. При нажатии любой клавиши растормаживается механизм поворота платформы рабочего места. Тормоз рабо- • чего места управляется рычагом 19. Рычаг 19 имеет два положения: в одном положении рабочее место космонавта стопорится, в другом - свободно перемешается. Рычаг 20 управляет положением фиксирующих скоб, причем положение рукоятки и фиксирующей скобы регулируется с помощью храпового механизма 21 и клавиши 22, позволяющей менять усилие прижатия ног космонавта к платформе рабочего места. Движение осуществляется по направляющей 3 на роликах 23 и 24 {фиг. 7), установленных в нижней части рабочего места, называемым основанием. Пара роликов 23, расположенных по одной стороне направляющей, подпружинена, что позволяет выбирать люфты между направляющей и рабочим местом космонавта. Для остановки и фиксации рабочего места в необходимом положении вторая пара роликов 24 (фиг. 7) оснащена зубчатыми венцами 25, взаимо действующими с подпружиненными рычагами 26 (фиг. 8). Торможение происходит, когда зуб рычага находится в зацеплении с венцом колеса под действием пружины 27. Управление рычагами осуществляется посредством тяги 28 через рычаг 29 и далее на стойку с рычагами управления. Поворот верхней части рабочего места космонавта, именуемой платформой 30 (фиг. 9),.осуществляется за счет опорного подшипника 31, а фиксация платформы в нужном для космонавта положении происходит подпружиненным рычагом 32 (фиг. 7), расположенным на тележке, и зубчатым венцом 33, расположенным на наружной обойме подшипника. Управление поворотом верхней части рабочего места космонавта осуществляется аналогично управлению рычагом тормоза. Для крепления ног космонавта па рабочем месте вращающаяся платформа снабжена фиксирующими скобами в виде кривошипов 34 (фиг. 3), которые закреплены на поворотном рычаге 35 (фиг. 9). При повороте рычага по стрелке (фиг. 9) вышеупомянутые скобы прижимают ноги космонавта к плоскости платформы. Рычаг приводится в действие посредством тяги 36, рычага 37, тяги 38, рычага 39и сферического подшипника 40, ось которого совпадает с осью вращения платформы. Тяга 36 управляется горизонтальной рукояткой с храповым механизмом, расположенным на стойке рабочего места космонавта. Фиксирующая скоба в виде кривошипа имеет участок с цилиндрической пружиной 41 (фиг. 3). Жесткость пружины подобрана так, "чтобы ноги космонавта прижимались к платформе рабочего места с усилием, достаточным для выполнения всех операций. Если в процессе работы функционирсь вание устройства нарушится и космонавт не сможет открыть скобы, чтобы выйти из рабочего места, то пружины позволяют провести аварийную расфиксацию ног космонавта. Шарниры, соединяющие верхнюю и нижнюю части рамы представлены на фиг. 10. Каждый шарнир имеет ось вращения 42 и подпружиненную защелку 43, фиксирующую раму в рабочем положении. Защелка вращается на оси 44 с двумя эксцентриковыми опорами. Это позволяет рукояткой 45 путем поворота ее выбрать люфты в защелке после ввода рамы в рабочее положение. С правой стороны поручня имеется кронштейн 46, на котором крепится блок технологической аппаратуры 47. Рабочая станция в зависимости от целей эксперимента устанавливается либо в грузовом отсеке "Shuttle", либо выносится в транспортном положении и монтируется в рабочее положение на внешней поверхности космической станции типа «МИР». Процесс происходит следующим образом: в сложенном положении с направляющей 3 рабочей станции снято рабочее место 2 "космонавта, поручень 4 отстегнут и сложен вокруг шарниров 42, блок крепления сменных образцов 6 и технологическое оборудование 47 снято. После установки рабочей станции космонавта на крепежные места, поручень поднимают и защелкивают с помощью подпружиненной защелки 43, которая затем затягивается с помощью рычага 45 и эксцентриковой оси 44. Блок крепления сменных образцов устанавливается в гнезда 8 с помощью подпружиненных язычков 10, которые 20353 блокируют его и не дают возможности выпасть. Блок технологической аппаратуры крепится с помощью кронштейна 46, имеющего подпружиненный замок . Рабочее место 2 накатывается на направляющую 3 с любой удобной стороны, при этом необходимо снять его с тормозов 26 с помощью рукоятки 19. После установки рабочего места 2 оно фиксируется на направляющей 3 с помощью рукоятки 19 и готово к работе. Работа на рабочей станции производится следующим образом. Операторы в скафандрах (двое) устанавливают в гнезда 8 блок сменных образцов 6, имеющий ось 9 . Когда оси 9 сели в гнезда 8, их блокируют защелками 10 с помощью рукояток 11. С левой стороны блока сменных образцов б имеется зубчатое колесо 12 С помощью рукоятки 14, язычка 15 и вышеозначенного колеса 12 космонавты могут выбирать наиболее удобное положение для работы и менять образцы во время эксперимента Рабочее место космонавта 2 предназначено для фиксации ног космонавта, его передвижения вдоль рамы по направляющей и поворота вокруг собственной оси и работает следующим образом. Движение вдоль рабочей зоны осуществляется по направляющей 3 на роликах 23 и 24 (фиг. 7), установленных на тележке рабочего места (фиг. 7). Пара роликов 23, расположенных по одной стороне направляющей 3 подпружинена, что позволяет выбирать люфты между направляющей 3 и рабочим местом 2, и обеспечивает плавный ход по направляющей. Для остановки и фиксации рабочего места 2 в необходимом положении вторая пара роликов 24 (фиг 6) оснащена зубчатыми венцами 25, взаимодействующими с подпружиненными рычагами 26. Торможение происходит, когда зуб рычага 26 находится в зацеплении с венцом колеса 25 под действием пружины 27. Управление рычагами 26 осуществляется посредством тяги 28 через рычаг 29 и далее на стойку 16 с элементами управления с помощью рычага 19. Рычаг 19 имеет два рабочих по ложения левое -торможение , а правое свободный ход. Поворот платформы 30 (фиг. 9) верхней части рабочего места космонавта осуществляется за счет подшипника 31, а фиксация платформы 30 в нужном для космонавта положении происходит подпружиненным рычагом 32 (фиг 7) и зубчатым венцом 33, расположенным на наружной обойме подшипника 31. Управление поворотом верхней части рабочей площадки космонавта 30 осуществляется с помощью двух клавиш 18, дублирующих друг друга, на рукоятке рабочего места 17. При нажатии любой клавиши 18 растормаживается механизм поворота платформы. Для крепления ног космонавта на рабочем месте 2 вращающаяся платформа 30 снабжена скобами в виде кривошипов 34 (фиг. 3), которые закреплены на поворотном рычаге 35 (фиг. 9) При повороте рычага 35 по стрелке (фиг. 9) вышеупомянутые скобы 7 прижимают ноги космонавта к плоскости платформы 30. Рычаг 35 приводится в действие посредством тяги 36, рычага 37, тяги 38, рычага 39 и сферического подшипника 40, ось которого совпадает с осью вращения платформы 30. Тяга 36 управляется рукояткой 20, расположенной на стойке 16 рабочего места космонавта 30, причем положение рукоятки 20 и эксцентриковой скобы 34 регулируется с помощью храпового механизма, позволяющего менять усилие прижатия ног космонавта к верхней части рабочего места 30. Скоба 34 в виде кривошипа имеет участок с цилиндрической пружиной 41 (фиг. 3). Жесткость пружины 41 подобрана так, чтобы ноги космонавта прижимались к платформе рабочего места 30 с усилием, достаточным для выполнения всех операций. Если в процессе работы функционирование устройства нарушится и космонавт не сможет открыть скобы, чтобы выйти из рабочего места, то пружины 41 позволят провести аварийную расфиксацию ног космонавта. 20353 Фиг. 1 Фиг. 2 5 20353 Фиг. 3 Фиг. 4 20353 Фиг. 5 20353 Фиг. 7 27 Фиг 8 20353 Фиг. 9 Фиг 10 Тираж 50 екз Поліграфчний комбінат ВАТ "Патент" вул Гагаріна, 101, м Ужгород, 88000, Україна (03122)3-72-89 2-59-54
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of working station for performance of experiments in space
Автори англійськоюPaton Borys Yevhenovych, Bulatsev Oleksandr Ratmyrovych, Perepechenko Borys Ivanovych, Moreinis Mykhailo Josypovych, Zahrebelnyi Oleksandr Aizykovych, Markov Oleksandr Viktorovych, Liubomudrov Ihor Heorhiivych, Kriukov Valerii Anatoliiovych, Dem'ianenko Volodymyr Vasyliovych, Havrysh Serhii Semenovych
Назва патенту російськоюУстройство рабочей станции для проведения экспериментов в космосе
Автори російськоюПатон Борис Евгеньевич, Булацев Александр Ратмирович, Перепеченко Борис Иванович, Морейнис Михаил Иосифович, Загребельный Александр Айзикович, Марков Александр Викторович, Любомудров Игорь Георгиевич, Крюков Валерий Анатольевич, Демьяненко Владимир Васильевич, Гавриш Сергей Семенович
МПК / Мітки
МПК: B64G 9/00
Мітки: пристрій, проведення, експериментів, станції, робочої, космосі
Код посилання
<a href="https://ua.patents.su/10-20353-pristrijj-robocho-stanci-dlya-provedennya-eksperimentiv-v-kosmosi.html" target="_blank" rel="follow" title="База патентів України">Пристрій робочої станції для проведення експериментів в космосі</a>
Пристрій а.а.вітова та ю.в.грубніка для проведення лігатури
Номер патенту: 9412
Опубліковано: 30.09.1996
Автори: Вітов Альберт Анатолійович, Грубнік Юрій Володимирович
МПК: A61B 17/12
Мітки: лігатури, пристрій, проведення, а.а.вітова, ю.в.грубніка
Формула / Реферат:
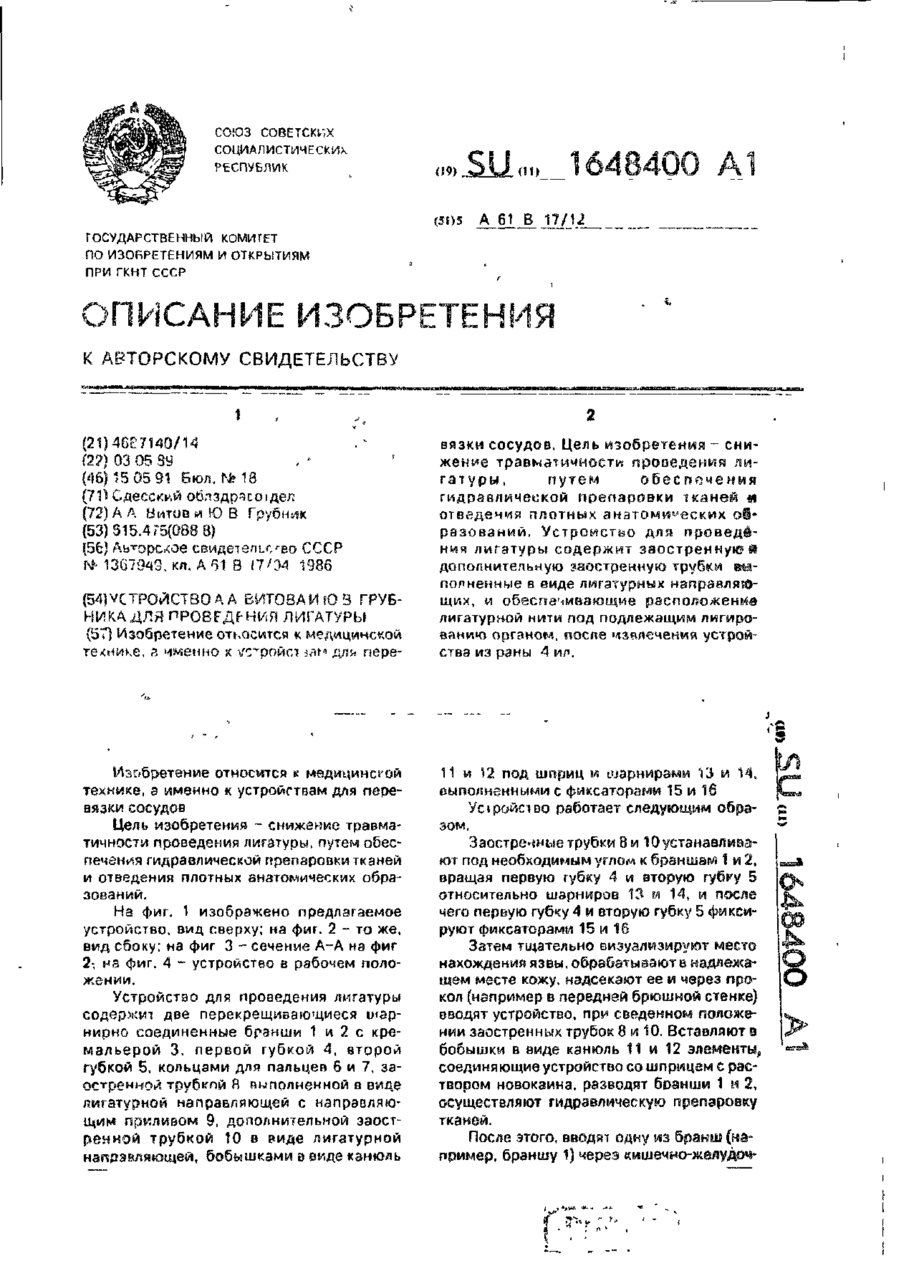
Устройство для проведення лигатуры, содержащее две перекрещивающиеся шариирно соединенные бранши с губками, кольцами для пальцев и заостренной трубкой в виде лигатурной направляющей, установленной на первой губке, отличающееся тем, что, с целью снижения травматичности проведения лигатуры путем обеспечения гидравлической препаровки тканей и отведения плотных анатомических образований при лапароскопической остановке к ровотечения, оно...
Пристрій для розміщення, закріплювання і передвижки приводної станції забійної гірської машини
Номер патенту: 5791
Опубліковано: 29.12.1994
Автори: Івлєв Пєтр Єгорович, Шаповалов Олег Васильович, Подпружніков Василь Іванович, Рибалкін Анатолій Тихонович
МПК: E21C 27/32, E21F 13/08
Мітки: пристрій, станції, забійної, приводної, машини, закріплювання, гірської, передвижки, розміщення
Формула / Реферат:
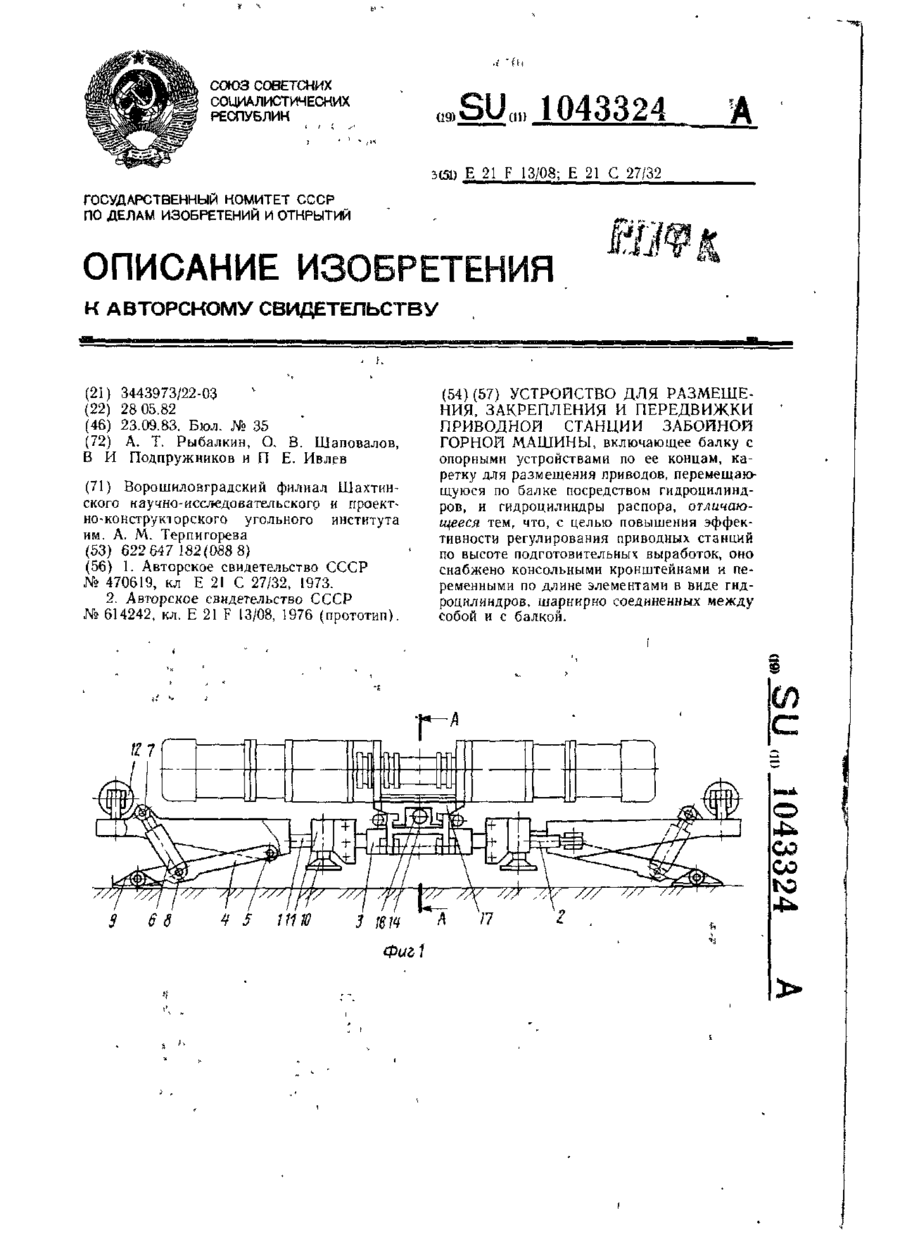
Устройство для размещения, закрепления и передвижки приводной станции забойной горной машины, включающее балку с опорными устройствами по ее концам, каретку для размещения приводов, перемещающуюся по балке посредством гидроцилиндров, и гидроцилиндры распора, отличающееся тем, что, с целью повышения эффективности регулирования приводных станций по высоте подготовительных выработок, оно снабжено консольными кронштейнами и переменными по...
Пристрій для зварювання з вентиляцією робочої зони
Номер патенту: 16920
Опубліковано: 29.08.1997
Автор: Липцин Фелікс Григорович
МПК: B23K 37/08, B23K 7/00, F24F 13/02
Мітки: пристрій, зони, вентиляцією, зварювання, робочої
Формула / Реферат:
Устройство для сварки с вентиляцией рабочей зоны, содержащее закрепленное на корпусе вентиляционное устройство с узлом для подачи приточного воздуха в зону сварки и узлом для отсоса вредностей из зоны сварки с плоскостями вытяжки и притока, параллельными друг другу, отличающееся тем, что, с целью повышения эффективности отсасывания вредностей и сокращения объема отсасываемого воздуха, плоскость притока воздуха размещена параллельно рабочей...
Пристрій захисту станційного обладнання електронної автоматичної телефонної станції від перенапруг
Номер патенту: 20740
Опубліковано: 07.10.1997
Автори: Швидкий Ігор Миколайович, Круглов Олександр Аркадійович, Бадія Віктор Олександрович, Федосенко Анатолій Федорович
МПК: H02H 7/00
Мітки: станції, електронної, автоматичної, захисту, станційного, телефонної, пристрій, обладнання, перенапруг
Формула / Реферат:
Устройство защиты станционного оборудования электронной автоматической телефонной станции от перенапряжений, содержащее полый пластмассовый держатель с двумя основными плоскими пружинными контактами, закрепленными внутри держателя при помощи выводов для пайки, вставленных в отверстия о держателе, и установленный между контактами разрядник, отличающееся тем, что между корпусом держателя и основными контактами установлены два...
Пристрій одноканального автопідстроювання частоти гетеродина в імпульсній радіолокаційній станції
Номер патенту: 14308
Опубліковано: 25.04.1997
Автори: Жарій Ігор Олександрович, Павлов Юрій Єфімович, Косінський Олексій Сергійович
МПК: H03L 7/00, G01S 13/00, G01S 13/34, H03L 7/08
Мітки: імпульсний, автопідстроювання, гетеродина, пристрій, частоти, одноканального, радіолокаційний, станції
Формула / Реферат:
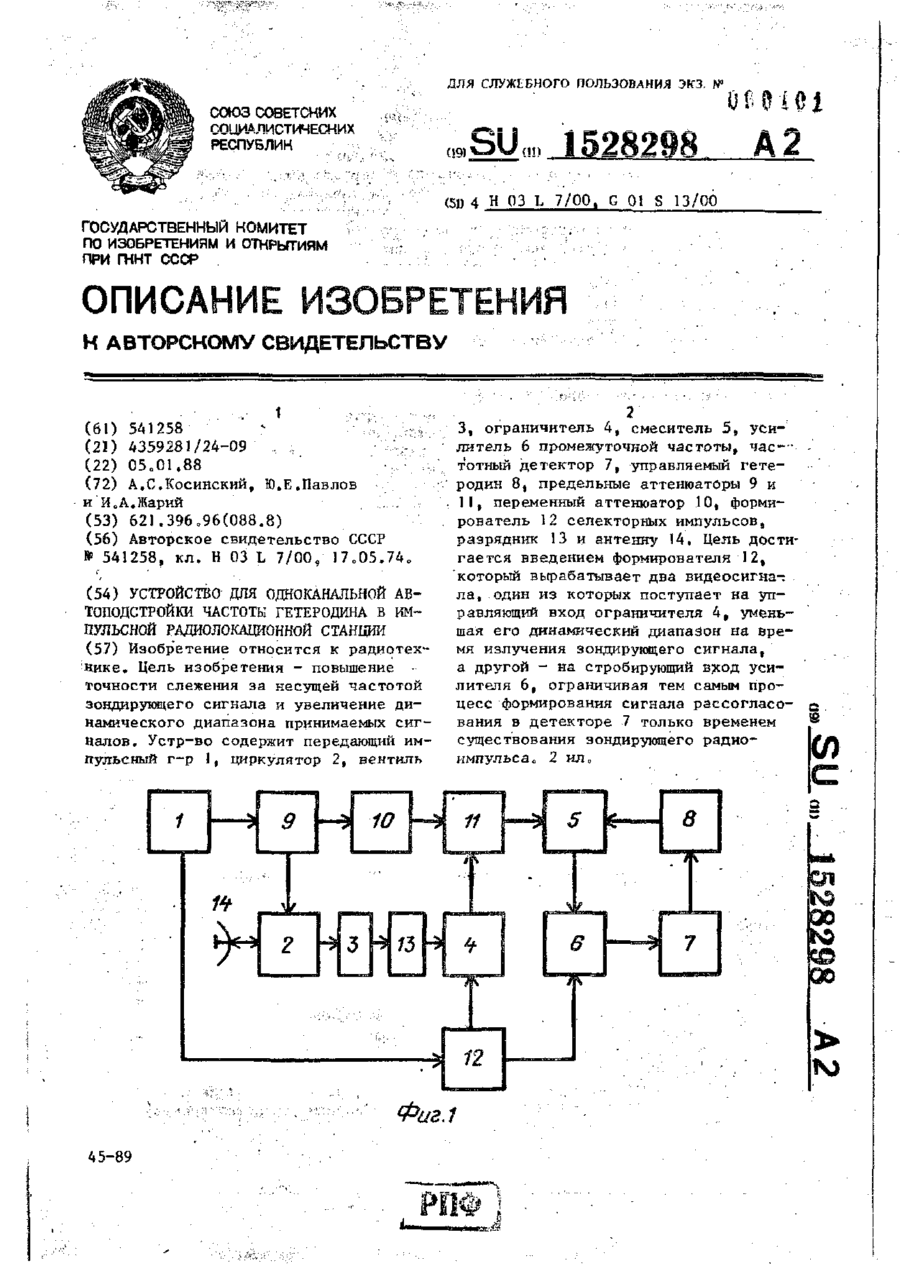
Устройство для одноканальной автоподстройки частоты гетеродина в импульсной радиолокационной станции по авт. св. № 541258, отличающееся тем, что, с целью повышения точности слежения за несущей частотой зондирующего сигнала и увеличения динамического диапазона принимаемых сигналов, в него введен формирователь селекторных импульсов, вход и первый и второй выходы которого соединены соответственно с дополнительным выходом передающего...
Попередній патент: Спосіб одержання теплоакумулювального матеріалу
Наступний патент: Спосіб вимірювання характеристик розсіяння об’єкта в субміліметровому діапазоні радіохвиль і пристрій для його здійснення
Випадковий патент: Спосіб кальцинації гідрокарбонату натрію