Пристрій спіцина для закріплення рухомого залізничного складу
Номер патенту: 32031
Опубліковано: 15.12.2000
Автори: Спіцин Василь Олександрович, Шевчук Сергій Олександрович, Іончиков Анатолій Миколайович
Текст
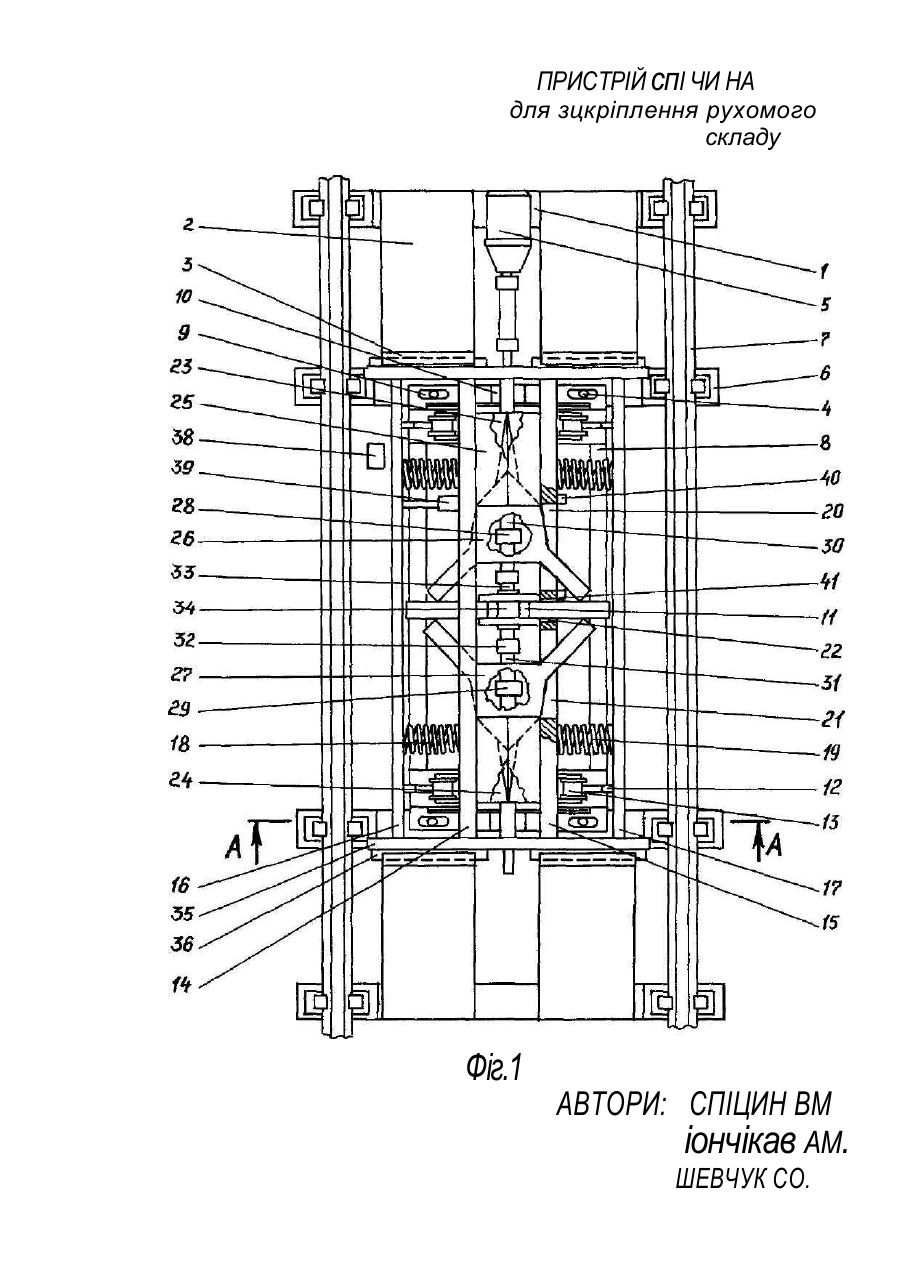
ВДК SB 6ПС I/IS П Р И С Т Р І Й С П І Ц М Н А ДЯЯ ЗАКРІПЛЕННЯ РУХОІЮГО ЗАЛІЗНИЧНОГО СКЛАДУ Винах ід н алеж ит ь до засобів мех ані зац ії на з алі зн иц і, а сам е - до фіксаторів дяя закріплення рухомого складу й може бути використаний да закріплення складу на рейках нісля відчеплення локомотиву. Відомий пристрій дія закріплення рухомого складу , що містить змон*» товану в колії поміж рейками раму з упорами, розпірний механізм, викон; ний у вигляді рухомої каретки з пружинними блоками та розпірними тяга * ми, шарнірно з "вданими з закріплюючими балками , привід, що має двигун, розміщений поза колією та елементи нередачі* шарнірно з*еднанІ з рухом( кареткою, забезпеченою блоком обмеження II поздовжного руху та блок контролю положення рухомого складу (a.e.CPCP J&I&43268 Ц. Кл. 61 6Ш 7 / 1 6 І 99 І р ^ ан а ло г ) Відомий пристрій не забезпечує високої надійності so причині знач* ноі вірогідності виходу з ладу приводу. Через велику КІЛЬКІСТЬ шарнірів та важелевих передач кінематична ехема пристрою недосконала по ири ' ні наявності надошкових ЗВ * ЯЗК ІВ , які викликають перекоси, заклинення, тобто надмірне навантаженн я приводу та передчасний вихід його & ладу. Крім того, відсутність контролю зусилля прижаття закріплюючих балок до внутрішніх иоверхкей колісних дар також знижує надійність Найбільш близьким до заявляйомого винаходу но технічній суті і досягаемому результату є пристрій дяя закріплення рухомого залізнич** ного складу (а.є, СРСР &І235779 МЛСл, 6В 6Ш 7/16 1986р.), прийнятий як прототип* що містить раму з упорами, розміщену в колії номіж рей** каш» розпірний механізм, виконаний у вигляді рухомої каретки з щ>у жинними блоками та розпірними важелями , шарнірно з"єднаними з закріп люючими балками, закріпленими на рамі за допомогою механізму ИІДВІС -ки, щривід, включаючий двигун» розміщений поза колією, гвинтову передачу», систему валів та черв и ячну передачу, механізм обмеження ноздов* жного руху рухомої каретки, датчик положення рухомого складу * Проте, відомий пристрій також не забезпечує потрібної надійності, так як не компенсує зміни експлуатаційних параметр їв таких , як зміна відстані між внутрішніми поверхнями колесС є допуск ІЗмм при ВИГОТОВ * л енні їх ), в ерти кал ьні п еремі щенн я рей о к н ід ді єю рі зн ої ваг и р із * та платформ, можливе зміщення колісних пар в поперечному 2 . н а ирямку від поздовжної осі до 50мм, прототип також не мае контролю зусилля нрижаття закріплюючих балок до внутрішніх новерхней колісних пар. Іее це в цілому знижує надійність закріплення складу та пристрою в цілому. Ознаками прототипу, співпадаючими з суттєвими ознаками заявляемого винаходу, є: • рама з упорами; - двигун приводний; - закріплюючі балки; . • пружинні блоки| • розпірний механізм; • гвинтова передача; - блок обмеження кінцевих положень розпірного механізму; - датчик положення рухомого складу. Причиною, перешкоджаючою одержанню технічного результату» ноляга* ючому в нідвищенні надійності нристрою й безпеки руху на транспорті» є недосконалість розпірного механізму , приводу та відсутність контролю зусилля нрижаття закріплюючих балок до внутрішніх новерхней коліс* них пар» що в сукупності не забезпечує гарантійного закріплюючого зусилля ари зміжах експлуатаційних параметрів колісних нар та рейкової #сййіЛ наприклад, при зміщеннях колісних пар в поперечному напрямку відносно поздовжної осі колії до 50мм, при допустимому граничному відхиленні відстані між внутрішніми поверхнями колісних нар І Змм, ари вертикальних переміщеннях рейки нід дією ваги вагонів, а також через недюсконалість кінематичної схеми шарнірно-іажелевих механізмів, що мають надлишкові зв яязки, які викликають перекоси, заклинення» в результаті чого виникають иеренавантаження приводу й вихід його з ла,ау». що знижує надійність пристрою й підвищує можливість сходу складу нід уклін. Це зюшуе безпеку руху на транспорті, В основу винаходу поставлена задача: удосконалити пристрій дяя закріплення рухомого залізничного складу й ПІДВИЩИТИ ЙОГО надійність за рахунок автоматичної компенсації змін експлуатаційних параметрів колісних пар вагонів та рейкової колії, а також забезпечення необхід* ного гарантованого закріплюючого зусилля шляхом розміщення розпірного механізму на проміжній рухомій рамі, забезпечуючій самоцентрування йс відносно внутрішніх поверхне! колісних пар, а також контролю та компенсації вертикальних переміщень, зусилля натиску закріплюючих балок до внутрішніх поверхней колісних пар* Поставлена задача вирішується тим, що пристрій Сніцина для закріплення рухомого залізничного складу, що містить основну раму з упорами та приводним двигуном, закріплену в колії між рейками, закріплюючі балки з пружинними блоками, розпір-. ний механізм з гвинтовою передачею, блок обмеження кінцевих положень з» рознірного механізму І датчик положення рухомого складу, при цьому він додатково забезпечений блоком контролю нажимного зусилля, нажим-НКМЙ балками з опорними роликами, з"єднаними з закріпляючими балками, за допомогою пружинних блоків І забезпеченими поперечними та ноздовжними направляючими пазами, в одній площині з якими закріплені попарно й симетрично нерухомі клини з направляючими пластинами, проміжною рухомою рамою, забезпеченою похилими опорами з ламаним профілем,, вертика ними направляючими й поперечними направляючими, за ДОПОМОГІЮ ЯКИХ вона розміщується на вертикальних штирях основної рами» закріплених через діелектричні прокладки на ЕІДОШВІ рейок, упори якої додатково забезпечені виступами, проміжним валом в ПІДВІСНІЙ ЙІДШИННИКОВІЙ опорі, розміщеній в нонеречнизйшнрвляючих пазах нажимних балок, поперечними підтримуючими балками з виступами, маючими можливість зачеплення з виступ ми упорів на основній рамі, а також забезпечених направляючими пазами, в яких розміщені ВІДПОВІДДІ КІНЦІ закріплюючих та нажимних балок, при цьому розпірний механізм виконаний у вигляді симетрично розташовзяих/ї хомих клинів, розміщених в поздовжних направляючих пазах нажимних бале та направляючих пластинах нерухомих клинів з можливістю взаємодії з ни ми та з гайками гвинтової передачі, котра виконана у вигляді двох гвин тових пар, ВІДПОВІДНО з лівою та правою різьбою, з иеднаних за допомогою проміжного валу І шарнірів з приводним двигуном, при цьому розпірний механізм разом з нажимними р закріплюючими та поперечними підтримуючими балками має можливість переміщень в вертикальних направляючих проміжної рухомої рами й разом з нею можливість поперечних переміщень за допомогою II поперечних направляючих пазів та вертикальних штирі^ основної рами, крім того клини виконані з ламаним профілем поверхні ковзання, причому кут нахилу в II носовій частині в7-І0 разів біль ший за кут II нахилу в хвостовій частині. Запропонована сукупність ознак, характеризуючих винахід, забезпечує надійне закріплення складу шляхом автоматичної компенсації змін експлуатаційних параметрів, наприклад, змін відстані між внутрішніми поверхнями колес, вертикальних переміщень рейок під дією ваги вагонів, зміщень колісних пар в поперечному напрямку від поздоюної осі колії, а також шляхом контролю зусилля прижаття закріплюючих балок до внутрішніх поверхней колісних пар. Таким чином досягається поставлена задача - вдосконалення й підвищення надійності пристрою й безпека руху транспорту. Суть винаходу пояснюється кресленнями, де на фіг«І наведений загальний вигляд в плані прстрою для закріплення рухомого залізничного складу» на фіг. 2 наведений розріз пристрою по А~А і його вихідному С розкріпленому стані; на фіг.З наведений розрізпристрою но А-А в закріпленому стані складу» Пристрій Сніцина для закріплення рухомого залізничного складу містить основну раму І з упорами 2, забезпечся виступами З, вертикаль ними штирями 4 та приводним двигуном 5, розміщену в колії та закрінлен; через діелектричні прокладки 6 на підошвах рейок 7, на якій розміщена проміжна рухома рама 3 за допомогою поперечних пазів 9, якими вона за*» безнечеиа, на вертикальних штирях 4- основної рами, з вертикальними на* нравляшими ІОДІ та похилими опорами з ламаним профілем 12, взаємодіючими з опорними роликами ІЗ» нерухомо закріпленими на нажимних балках 14,15» з"еднаних з закріплюючими балками 16,17 за допомогою пружинних блоків 18,19 та забезпечених ноздовжниш 20,21 та ноперечними 22 на п>авляючими пазами, в одній площині з якими закріплені попарнр й симетрично нерухомі клини 23,24 з направляючими пластинами 25. В поздовж них направляючих пазах 20,21 та направляючих пластинах 25 розміщені рухомі клини 26,27 розпірного механізму, на яких закріплені ВІДЛОВІДЛО гайки 28,29, що мають одна ліву, другд праву різьбі* та взаємодіючі з й ВІДПОВІДНИМИ гвинтами 30,31, з едйаними між собою за допомогою шарні * рів 32, наприклад, карданних та проміжного вала 33 в ПІДВІСНІЙ ЙІДШИН онорі 34, розміщеній в поперечних направляючих пазах 22 нажимних балок 14,15 та вертикальних направляючих II нрміжної рухомої рами В ІЛЬНІ КІНЦІ ГВИЇТІВ 30,31 розміщені в вертикальних направляючих 10 нроміжної рами, взаємодіючи з поперечними підтримуючими балками 35, що мають виступи 36 та направляючі пази 37, причому ода з КІНЦІВ гвинта, наприклад ЗО, шарнірно з"еднаний з приводним двигуном 5. В направляю чих пазах 37 поперечних підтримуючих балок розміщені ВІДПОВІДНІ КІНЦІ нажимних 14,15 та закріплюючих балок 16,17, крім того ви с ту ни % поперечних підтримуючих балок мають можливість взаємодії з вистумамиЗ упорів 2 при вертикальних переміщеннях розпірного механізму. В зоні роз міщення пристрою встановлений датчик положення складу 38* На нажимній балці, наприклад 14, закріплений блок контролю нажимного зусилля 39 з можливістю взаємодії з закріплюючою балкою 16. На нажимній балді , наприклад 15, розміщений блок обмеження кінцевих положень розпірного ме ханізму, виконаним, наприклад, у вигляді двох кінцевих вимикачів 40,41 НИКОЇІЙ Робота пристрою здійнюеться слідуючим чином Пристрій може бути в двох кінцевих положеннях, а саме: в вихідно^ С склад розкріплений) та робочому (склад закріплений). Робота пристрою нри закріпленні складу. Встановлюють колісну пару першого вагона залізничного складу в зоні дії пристрою. При цьому спрацьовує здтчик положення складу 38 й за микає свої контакти (на кресленні не показані) в ланцюгу запуску двигуна 5. Включаюіь двигун 5 * ШЙЙ нриводять * обс^^тя з*еднанІ з ни 5. гвинти 30,31, забезпечені ВІДПОВІДНО ЛІВОЮ та правою різьбою, котрі в свою чергу взаємодіють з ВІДПОВІДНИМИ гайками 28,29 І переміщують їх в протилежні боки разом з рухомими клинами 26,27 розпірного механГ зму, на яких вони встановлені. При переміщенні клинів 26,27 в повздов жних направляючих 20,21 НЗЖИМНЙХ балокІ4,І5 та направляючих пластинах 25 нерухомих клинів 23,24,вони діють на нерухомі клини23,24 І переміщують їх разом з нажимними 14,15 І закріплюючими балками 16,17 в протилежні боки від повздовжної осі колії до внутрішніх ловерхней кояісноі пари-Одночасно з горизонтальним переміщенням в поперечному напряла ку нажимні 14,15 та закріплюючі 16,17 балки І весь розпірний механізм піддімают^ен вгрру за допомогою опорних роликів ІЗ та похилих опор з ламаним профілем 12 до виходу їх на горизонтальну ділянку«При цьому кутДІІд яким розміщені поверхні взаємодіючих носових частин рухомих 26,27 І нерухомих 23,24 клинів,забезпечує максимальне використання пс тужності приводу на створеннязусилля по переміщенню розпірного механі му з найбільш можливою швидкістю, що значно скорочує час спрацювання пристрою* Після виходу опорних роликів ІЗ на горизонтальну ділянку похилих опор 12 підйом розпірного механізму завершується. К УТ, ПІД ЯКИМ розм] щені взаємодіючі поверхні рухомих 26,27 та нерухомих 23,24клинІв,ста< на порядок меншим,що забезпечує розвиток максимально можливого зусил; нажаття при заданій потужності приводу.ЗакрІплюючІ балкиІ6Д7 починаі взаємодіяти з внутрішніми поверхнями колісних пар одночасно чи одна : них раніше,в цьому випадку реакція колеса,що вступило у взаємодію paj ше,д[е на проміжну рухому раму 8 через розпірний механізм І буде пер міщати II в протилежному напрямку до вступу у взаємодію з колесом др гої нажимної балки, нісля чого їх поперечне переміщення припиняється а нажимні балки 14,15 продовжують переміщатись І зжимають далі попер ньо зжаті пружини пружинних блоків 18,19,які передають наростаюче зу силля зжаття через закріплюючі балки І6,І7на внутрішніх поверхнях ко лісних пар до досягнення заданого значення,що визначається блоком ко тролю нажймного зусилля 39,який в цей момент своїми контактамиСна кр ленні не показано) розриває ланцюг запуску двигуна 5 І він зупияяеть На іЩвму процес закріплення закінчується» Ддя попередження виходу Із строю приводу І складових частин розя ного механізму в аварійних випадках, при профілактичних включеннях Е строю без колісних пар в зоні його дії або з причини граничного знос клинових поверхней,відключення привідного двигуна5призводить блок о( меження кінцевих положень розпірного механізму,наприклад,кІнцевий в* микач4ОсвоІми контактамиСна кресленні не показано), розмикає ланцюг запуску двигуна 5, при взаємодії з рухомим клином 26 в його крайні му допустимому положенні» Робота пристрою при розкріпленні складу» Виякак» двигун 5 в протилежному напряшсу обертання, який приво дить в обертання також в протилежному напрямку гвинти 30,31, які вза емойюзь з ВІДПОВІДНИМИ гайками 28,29, переміщують їх разом з рухвш ми клинами 26,27 в протилежному напрямку. При цьому нажимні балки 14,1 під дією сили зжатих пружин пружинних блоків 18» 19 переміщуються в го зонтальному напрямку до поздовжної осі колії, а опорні ролики ІЗ, закр плені на них, котяться по горизонтальній ДІЛЯНЦІ ПОХИЛИХ опор з ламани профілем 12. В момент випрямлення пружинних блоків 18,19 до вихідногс попередньо напруженого стану ролики викочуються на похилі ділянки похи лих onopJ2, взаємодія закріплюючих балок 16,17 з колісними парами закі чується І весь розпірний механізм під дією власної ваги за допомогою опорних роликів ІЗ, що переміщуються по похилих ділянках похилих опор з ламаним профілем 12, повертається в вихідне кінцеве положення» Рухомий клич, наприклад 27, * v; діє на блок обмеження кінцевих положень розпірного механізму, наприклад, на кінцевий вимикач 41, який своїми контактами (на кресленні не показано) розмикає ланцюг запуску двигуна І він зупиняється. На цьому процес закріплення закінчується, а пристр] готовий до повторного циклу закріплення-розкріпленяя. Виготовлення рознірного механізму у вигляді симетричної клинової системи дозволяє уникнути, ,в порівнянні з прототипом, малонадійну важі левешарнірну систему І забезпечить повну взаємну компенсацію реактивних зусиль з боку колісних пар, а значить уникаютьея перекоси в розпі; му механізмі й зусилля , сприймаемі проміжною й основною рамами, що з. но підвищує надійність закріплення складу й знижує можливість поломки розпірного механізму. Розміщення розпірного механізму на рухливій проміжній рамі дає м ливість йому самому самоцентруватись відносно внутрішніх поверхней ко них пар І компенсувати їх можливі поперечні зміщення -25мм від осі кс й тим самим забезпечити рівномірне розподілення навантаження на обиді сторони, що також підвищує надійність закріплення складу». Наявність блоку контролю нажимного зусилля гарантує автоматичне відключення приводу тільки при досягненні закріплюючого зусилля нео^з но заданої величини, що забезпечує значне підвищення надійності закр] лення складу. Розміщення проміжного валу в ПІДВІСНІЙ ПІДШИПНИКОВІЙ опорі в су] ності з застосуванням симетрично розміщених гвинтових пар з протилежі ми різьбами дозвляе повністю взаємно скомпенсува.ти реактивні зусилля виникаючі у гвинтах І тим самим уникнути можливості їх передачі на є. менти привода и приводний двигун, уникаючи їх вихід з ладу по цій пр чині, тим самим також підвищує наЯйнІсть пристрою, а значить І наді 7. ність закріплення складу* Кріплення основної рами до ЙІДОЇЇШ рейок забезпечує незалежність ВИСОТИ підйому закріплюючих балок в закріпленому стані й висоти їх підвищення над рівнем головок рейок у ВІДПОВІДНОСТІ з габаритом наб ження споруд ГОСТ 9238-83 при любих вертикальних переміщеннях рейкової колії, що також забезпечує підвищення надійності закріплення скл ДУ. По пропонованому пристрою в 1998р. виготовлена масштабна діюча модель, що показує ВІДМІННІ результати, розроблена конструкторська документація на експерементальний зразок, виготовлення й випробування якого планується В І998/99р. на одній Із залізничних станцій* Джерела Інформації: ' І.а.с. СРСР ІІ643268 МКЛ.6В6Ш 7/КД99Ір.-аналог 2.a.ce GPGP #1235779 Ж Кл.бВбШ 7/І6Д98бр.~пріШ)їШі ПРИСТРІЙ спІ ЧИ НА для зцкріплення рухомого складу Фіг.1 АВТОРИ: СПІЦИН ВМ іончікав AM. ШЕВЧУК CO. ПРИСТРІЙ СПІЦИНА (ІЛЯ 3QK/?l/7J7e//Mff окладу 7/7УУУУ/ 35 16 т 16 Ш ftiS2*f2?f0e*f5 ІЗ 19 Л? 1? as гч г? ЗР 35 10 г* is 1г w 1? АВТОРИ: СПІЦИН В.О. ІОНЧІ КОВАН ШЕВЧУК CO.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of spitsyn for fastening of rolling stock
Автори англійськоюSpitsyn Vasyl Oleksandrovych, Ionchykov Anatolii Mykolaiovych, Shevchuk Serhii Oleksandrovych
Назва патенту російськоюУстройство спицына для крепления подвижного железнодорожного состава
Автори російськоюСпицин Василий Александрович, Иончиков Анатолий Николаевич, Шевчук Сергнй Александрович
МПК / Мітки
МПК: B61K 7/00
Мітки: закріплення, пристрій, залізничного, рухомого, спіцина, складу
Код посилання
<a href="https://ua.patents.su/10-32031-pristrijj-spicina-dlya-zakriplennya-rukhomogo-zaliznichnogo-skladu.html" target="_blank" rel="follow" title="База патентів України">Пристрій спіцина для закріплення рухомого залізничного складу</a>
Пристрій для закріплення рухомого залізничного складу
Номер патенту: 28603
Опубліковано: 16.10.2000
Автори: Потапов Ігор Ілліч, Іончиков Анатолій Миколайович, Безверхій Віталій Григорович, Єрмак Сергій Миколайович, Спіцин Василь Олександрович
МПК: B61D 7/16
Мітки: пристрій, рухомого, закріплення, залізничного, складу
Формула / Реферат:
Пристрій для закріплення рухомого залізничного складу, що містить раму, змонтовану в колії поміж рейками, рухому каретку з пружинними блоками, пару закріплюючих балок, кожна з яких шарнірно з¢єднана за допомогою двох тяг з пружинними блоками рухомої каретки, механізм підвіски закріплюючих балок, включаючий вигнуті важелі та кронштейни, шарнірно з¢єднані між собою, датчик положення залізничного складу, блок обмеження повздовжнього...
Автоматизований пристрій для закріплення рухомого складу залізничного транспорту
Номер патенту: 14982
Опубліковано: 04.03.1997
Автори: Потапов Ігор Ільіч, Новіков Григорій Іванович, Каплун Микола Дмитрович, Літвінцев Микола Олексійович, Шевченко Віктор Михайлович, Безверхій Віталій Григорович, Іончиков Анатолій Миколайович
МПК: B61K 7/00
Мітки: складу, транспорту, пристрій, закріплення, залізничного, автоматизований, рухомого
Формула / Реферат:
1 Автоматизированное устройство для закрепления подвижного железнодорожного состава, включающее привод с блоком управления и источником литания, датчик положения железнодорожного состава с контактными элементами, датчик положения подвижного закрепляющего модуля с контактными элементами и ограничителями хода и блок сигнализации с другим источником питания, отличающееся тем, что блок управления приводом включает размыкающий ключевой...
Переносний пристрій для закріплення рухомого складу на залізничних коліях
Номер патенту: 3075
Опубліковано: 26.12.1994
Автори: Чеботарьов Григорій Аврамович, Шумейко Василь Андрійович
МПК: B61K 7/00
Мітки: пристрій, складу, залізничних, переносний, коліях, закріплення, рухомого
Формула / Реферат:
Переносное устройство для закрепления состава на железнодорожных путях, содержащее установленный на рельсы колесный упор, несущий рычаги для охвата одними концами головку рельса, винт, резьбовым соединением связанный с другим концом одного из рычагов, и механизм поджатия указанных одних концов рычагов к рельсу, включающий в себя штангу для взаимодействия с колесом вагона, отличающееся тем, что рычаги шарнирно закреплены средней частью на...
Додаткова сходинка для залізничного рухомого складу
Номер патенту: 1856
Опубліковано: 20.12.1994
Автор: Курт Кауер
МПК: B61D 23/00
Мітки: складу, сходинка, рухомого, залізничного, додаткова
Формула / Реферат:
1. Дополнительная ступенька для железнодорожного подвижного состава, регулируемая по высоте и подвижная в почти горизонтальном положении, содержащая приводной рычажный механизм, связанный с площадкой тамбура, ось поворота которой расположена поперек подвижного состава и через точку поворота приводного элементу механизма связана с приводным валом, на котором закреплены одноплечие рычаги указанного механизма, другие концы которых соединены...
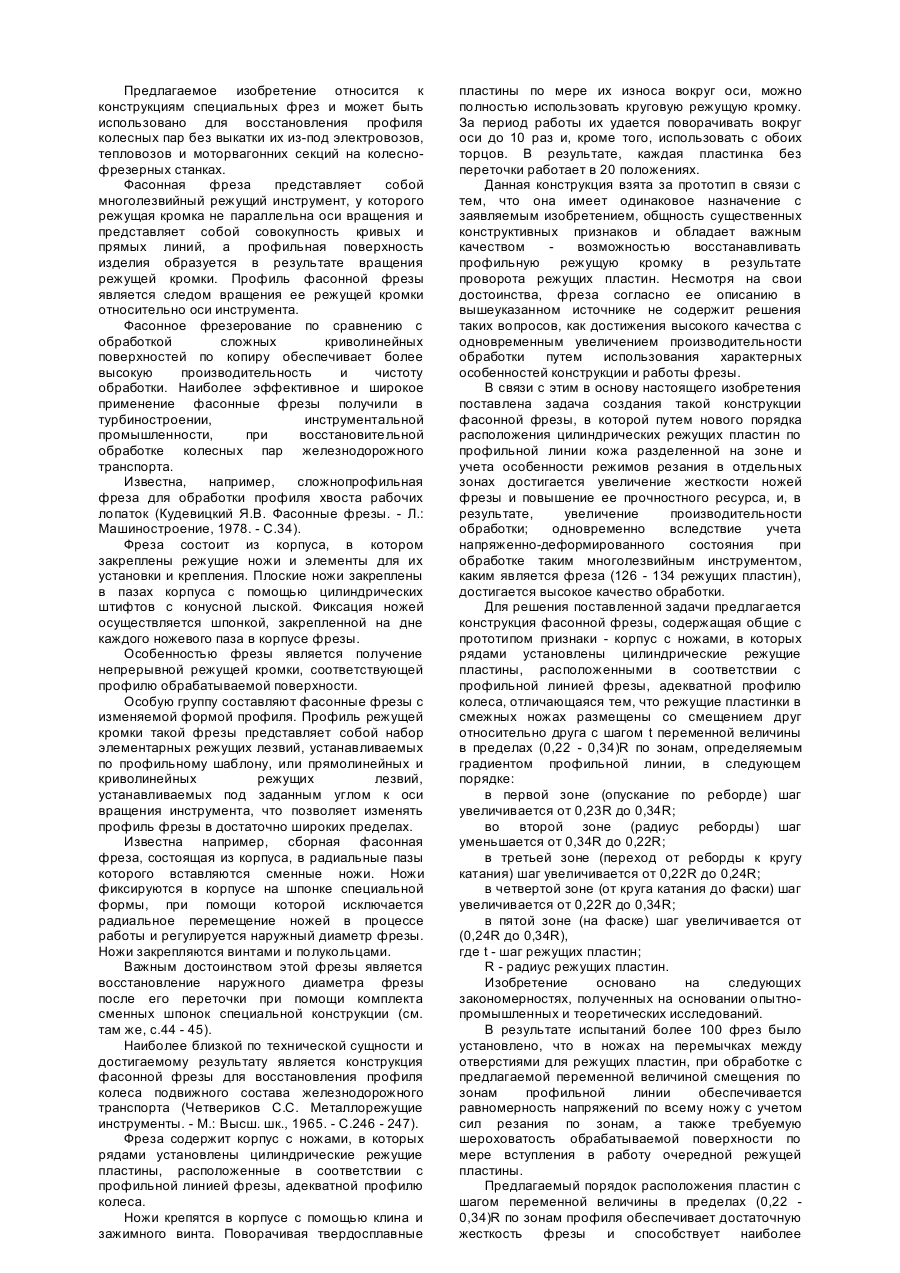
Фасонна фреза для відновлення профілю колеса рухомого складу залізничного транспорту
Номер патенту: 25091
Опубліковано: 30.10.1998
Автори: Колот Олександр Володимирович, Лишаєв Георгій Петрович, Коротун Сергій Анатолійович, Колот Володимир Олександрович, Сергієнко Микола Іванович, Малиновський Михайло Данилович
МПК: B23C 5/02
Мітки: відновлення, профілю, залізничного, фреза, транспорту, фасонна, складу, рухомого, колеса
Формула / Реферат:
Фасонная фреза для восстановления профиля колеса подвижного состава железнодорожного транспорта, содержания корпус с ножами, в которых рядами установлены цилиндрические режущие пластины, режущие кромки которых расположены по профильной линии ножа адекватной профилю колеса, отличающаяся тем, что режущие пластины в смежных ножах размещены со смещением друг относительно друга с шагом t переменной величины в пределах (0,22 - 0,34)R по зонам,...
Попередній патент: Лікарська плівка для терапії захворювань пародонту і слизової оболонки ротової порожнини
Наступний патент: Барвник для скла
Випадковий патент: Спосіб контролю стану призабійної частини масиву