Трикоординатний секвентний радіолокатор
Формула / Реферат
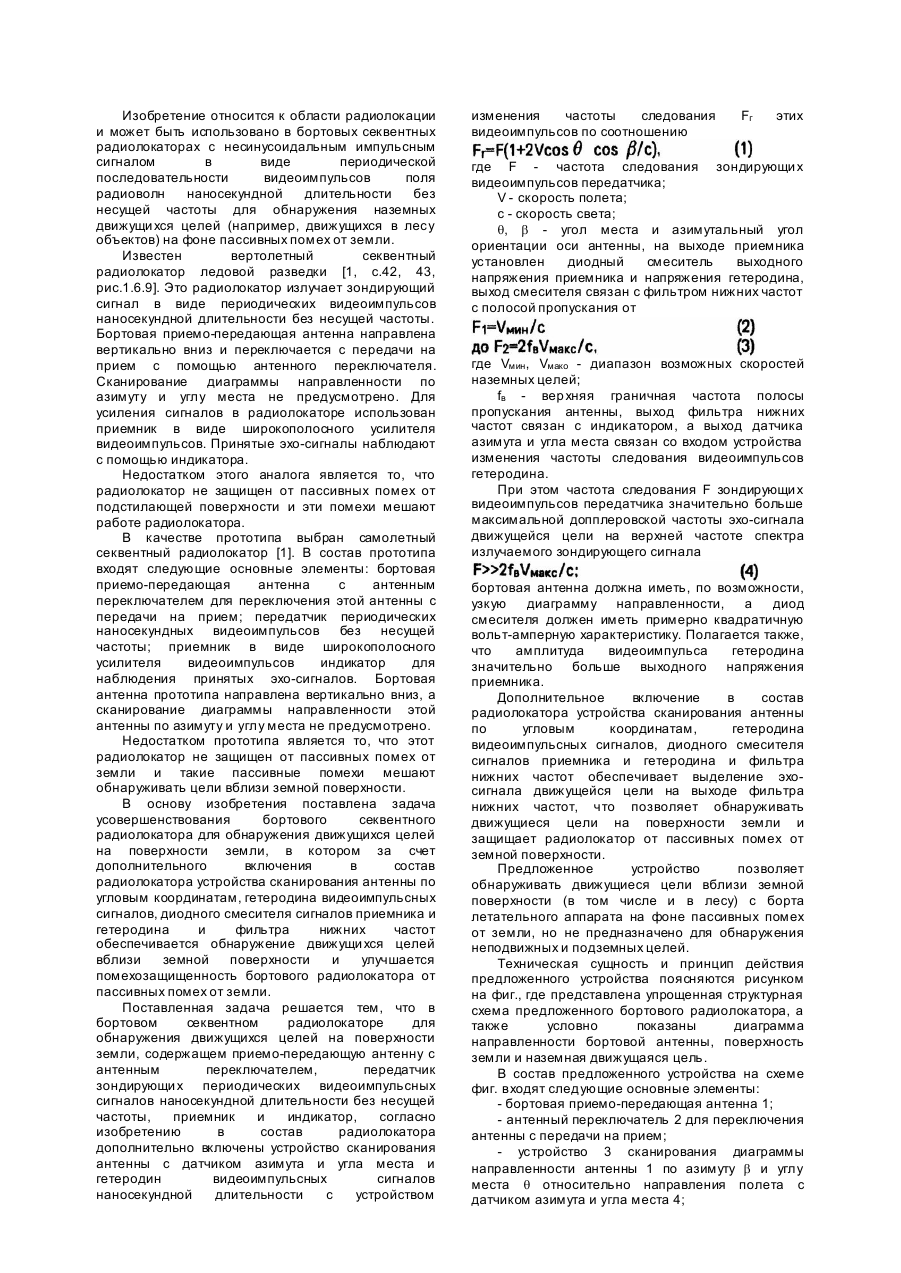
Трехкоординатный секвентный радиолокатор, содержащий антенную систему из двух разнесенных по горизонтали антенн, одна из которых является приемо-передающей, а другая - приемной, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты и приемник, отличающийся тем, что на выходе приемной антенны установлено устройство вычитания сигналов приемной антенны из сигналов приемо-передающей антенны, выход которого связан со входом приемника, на выходе приемника включены параллельно два широкополосных диода противоположной полярности, выходы которых связаны с измерителями времени запаздывания положительных и отрицательных видеоимпульсов эхо-сигналов относительно зондирующего видеоимпульса передатчика, выходы этих измерителей связаны с вычислителем трех координат цели по соотношениям
где r, q, b - наклонная дальность, угол места и азимутальный угол цели соответственно;
h - высота подъема антенн над землей;
d - разнос антенн по горизонтали;
c - скорость света;
tп1 tп2, tп3 - время запаздывания первого, второго и третьего положительных видеоимпульсов сигнала;
to1, to2, to3 - время запаздывания первого, второго и третьего отрицательных видеоимпульсов сигнала относительно зондирующего видеоимпульса соответственно.
Текст
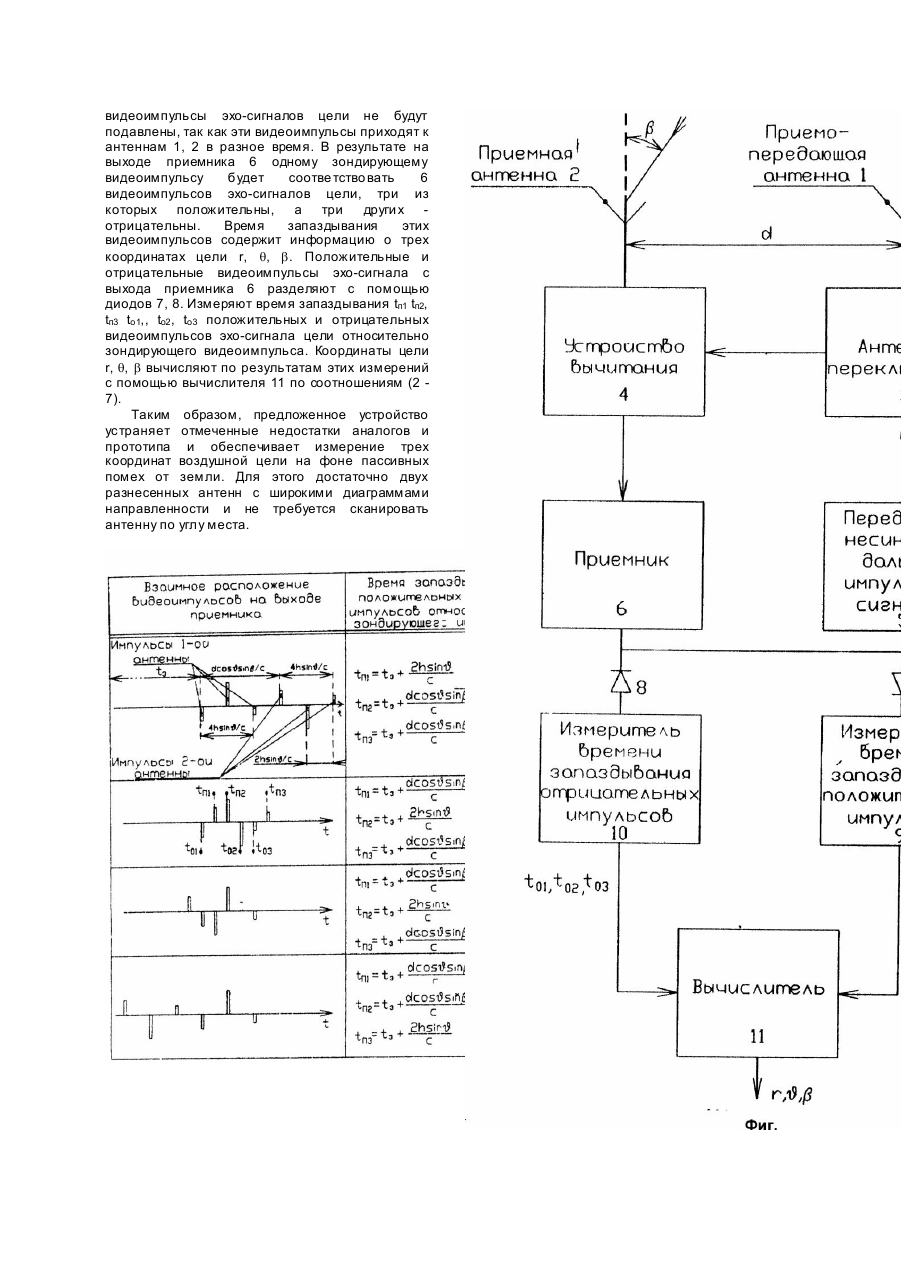
Изобретение относится к области радиолокации и может быть использовано в наземных секвентных радиолокаторах с несинусоидальным импульсным зондирующим сигналом в виде периодических видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты для измерения дальности, азимута и угла места цели на фоне пассивных помех от земли. Известна трехкоординатная радиолокационная станция [1], содержащая антенную систему, которая вращается в азимутальном направлении и создает диаграмму направленности в виде луча, сканируемого в некотором диапазоне углов места. Для качания луча по углу места в аналоге использовано частотное сканирование путем скачкообразного изменения частоты зондирующего радиоимпульса. Недостатком этого аналога является то, что для такой РЛС требуется сложное устройство частотного сканирования антенны по углу места. Другой недостаток аналога состоит в том, что это устройство нельзя использовать в секвентных радиолокаторах с несинусоидальным импульсным сигналом. Известна также радиолокационная система с трехкоординатной индикацией положения цели [2]. Эта система содержит две антенны, которые вращают по азимуту синхронно и синфазно. Первая антенна имеет диаграмму направленности, узкую по азимуту и широкую по углу места. Вторая антенна имеет узкую диаграмму направленности по азимуту и углу места, которую сканируют в угломестной плоскости. Плоскость сканирования второй антенны компланарна плоскости луча первой антенны. Недостатком этого аналога является то, что для такой радиолокационной системы требуется сложное устройство сканирования второй антенны по углу места. Другой недостаток этого аналога состоит в том, что вторая антенна должна иметь узкую диаграмму направленности, то есть большие размеры апертуры. Третьим недостатком аналога является то, что такую систему нельзя использовать в секвентном радиолокаторе с несинусоидальным импульсным сигналом, т.е. такая система не может обеспечить тех преимуществ, которые позволяет получить секвентный радиолокатор (например, высокое разрешение по дальности, возможность обнаружения целей с поглощающими покрытиями и т.п.). В качестве прототипа выбран секвентный радиолокатор, который можно использовать для измерения дальности и двух угловы х координат цели [3]. Такой радиолокатор излучает несинусоидальный импульсный зондирующий сигнал в виде периодических видеоимпульсов поля радиоволн наносекундной длительности без несущей часто ты. В состав прототипа входят следующие основные элементы: антенная система из четырех разнесенных антенн, одна из которых является приемопередающей, а другие - приемные; антенный переключатель для переключения приемо-передающей антенны с передачи на прием; передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты; приемник, имеющий четыре какала приема, каждый из которых связан со своей антенной. Прототип содержит также устройства для измерения времени запаздывания видеоимпульсов эхо-сигнала цели относительно зондирующего видеоимпульса. В прототипе дальность цели определяют по времени запаздывания видеоимпульса эхосигнала цели в том или ином канале приема относительно зондирующего видеоимпульса. Для обеспечения однозначности измерения дальности в прототипе требуется, чтобы период следования зондирующи х видеоимпульсов T удовлетворял следующему соотношению где rm - максимальная дальность обнаружения; c - скорость света. Определение двух угловы х координат цели в прототипе осуществляют по измерению дальностей от четырех разнесенных антенн до цели, а дальности определяют по измерению времени запаздывания видеоимпульсов четырех разнесенных антенн относительно одного зондирующего видеоимпульса. Недостатком прототипа является то, что для измерения трех координат цели требуется не менее четырех разнесенных антенн и четыре канала приема со своими широкополосными усилителями видеоимпульсов. Другой недостаток прототипа состоит в том, что обратные помеховые отражения зондирующи х сигналов от земной поверхности затрудняют работу прототипа и мешают обнаруживать цели и измерять их координаты. В основу изобретения поставлена задача усовершенствования трехкоординатного секвентного радиолокатора, в котором за счет дополнительного включения в состав радиолокатора устройства вычитания сигналов приемных антенн и диодов для разделения положительных и отрицательных видеоимпульсов выходного напряжения приемника обеспечиваются измерение трех координат цели по измерению времени запаздывания положительных и отрицательных видеоимпульсов сигнала, защита от пассивных помех и упрощение антенной и приемной систем секвентного радиолокатора. Поставленная задача решается тем, что в трехкоординатном секвентном радиолокаторе, содержащем антенную систему из двух разнесенных по горизонтали антенн, одна из которых является приемопередающей, а другая приемной, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей часто ты и приемник, согласно изобретению на выходе приемной антенны установлено устройство вычитания сигналов приемной антенны из сигналов приемопередающей антенны, выход которого связан со входом приемника, на выходе приемника включены параллельно два широкополосных диода противоположной полярности, выходы которых связаны с измерителями времени запаздывания положительных и отрицательных видеоимпульсов эхо-сигналов относительно зондирующего видеоимпульса передатчика, выходы эти х измерителей связаны с вычислителем соотношениям трех координат цели по где r, q, b - наклонная дальность, угол места и азимутальный угол цели соответственно; h - высота подъема антенн над землей; d - разнос антенн по горизонтали; с - скорость света; tп1 tп2, tп3 - время запаздывания первого, второго и третьего положительных видеоимпульсов сигнала; to1 , to2, t o3 - время запаздывания первого, второго и третьего отрицательных видеоимпульсов сигнала относительно зондирующего видеоимпульса соответственно. При этом отсчет азимутального угла цели b производится от оси антенной системы, угол места воздушной цел и считается положительным и отсчитывается ввер х от горизонтали, а полярность зондирующего видеоимпульса условно принята положительной. В предложенном устройстве период следования зондирующи х видеоимпульсов также определен ограничением (1), используются только две разнесенные по горизонтали одинаковые антенны с широкими диаграммами направленности, охватывающими рабочие секторы по азимуту и углу места, и принципиально необходимо облучать земную поверхность. Сканирование антенн по углу места не требуется и достаточно только одного канала приема с одним широкополосным приемником. Дополнительное включение в состав предложенного радиолокатора устройства вычитания сигналов приемных антенн и диодов для разделения положительных и отрицательных видеоимпульсов выходного напряжения приемника обеспечивает измерение трех координат цели по измерению времени запаздывания положительных и отрицательных видеоимпульсов сигнала. Предложенное техническое решение и указанные связи между элементами радиолокатора улучшают защиту от пассивных помех от земли и упрощают антенную и приемную системы секвентного радиолокатора. Техническая сущность и принцип действия предложенного устройства поясняются чертежом, где представлена упрощенная структурная схема трехкоординатного секвентного радиолокатора и условно показана его разнесенная антенная система. В состав предложенного устройства на схеме чертежа входят следующие основные элементы: - приемо-передающая антенна 1; - приемная антенна 2, удаленная от первой антенны по горизонтали в поперечном направлении на расстояние d (обе антенны одинаковы и установлены на одинаковой высоте h над землей); антенный переключатель 3 для переключения первой приемо-передающей антенны 1 с передачи на прием; - широкополосное устройство 4 вычитания сигналов второй антенны 2 из сигналов первой антенны 1; - передатчик 5 периодических видеоимпульсов наносекундной длительности без несущей частоты; - приемник 6 в виде одноканального широкополосного усилителя видеоимпульсов; - широкополосные диоды 7, 8 для разделения положительных и отрицательных видеоимпульсов эхо-сигналов цели с вы хода приемника 6; - измеритель 9 времени запаздывания tп1 tп2, tп3 трех положительных видеоимпульсов эхо-сигнала цели относительно зондирующего видеоимпульса; - измеритель 10 времени запаздывания to1, t o2, to3 трех отрицательных видеоимпульсов эхосигнала цели относительно зондирующего видеоимпульса; - вычислитель 11 трех координат r, воздушной цели по результатам измерений времени запаздывания tп1 tп2, tп3 , t o1 , to2, to3 с помощью соотношений (2 - 7). Для подтверждения возможности реализации предложенного устройства и получения положительного эффекта ниже обосновываются существенные отличительные признаки этого устройства и поясняется принцип его действия. Принцип действия предложенного устройства основан на использовании прямых и отраженных от земли эхо-сигналов цели, а также на использовании особых свойств несинусоидальных импульсных сигналов наносекундной длительности, которые проявляются в высокой разрешающей способности по дальности и способности таких сигналов изменять полярность видеоимпульсов поля радиоволн при отражении от земли или цели [3]. Пассивная помеха от земли представляет протяженное несинусоидальное периодическое напряжение отрицательной полярности, длительность которого сравнима с периодом T следования зондирующи х видеоимпульсов и значительно превышает длительность зондирующего видеоимпульса. Для подавления пассивной помехи от земли предлагается принять эту помеху двумя одинаковыми разнесенными по горизонтали антеннами и вычесть выходные напряжения антенн 1, 2 с помощью широкополосного устройства вычитания 4. При этом пассивная помеха от земли будет подавлена на выходе устройства вычитания, а эхо-сигналы воздушной цели не будут подавлены, Это объясняется тем, что время запаздывания видеоимпульсов эхо-сигнала воздушной цели в антеннах 1, 2 относительно друг друга обычно значительно больше длительности видеоимпульса и эти видеоимпульсы в антеннах 1,2 не совпадают по времени прихода. То есть высокая разрешающая способность секвентного радиолокатора по дальности обеспечивает выделение наносекундных видеоимпульсов эхосигнала цели и подавление пассивной помехи от земли большой протяженности с помощью устройства вычитания 4. Исключение составляет частный случай, когда азимут цели точно совпадает с направлением оси антенны. В этом частном случае эхо-сигнал цели будет подавлен так же, как и помеха. Для обеспечения работоспособности устройства в этом частном случае следует немного отклонить ось антенной системы по азимуту в любую сторону. Для измерения азимута b и угла места в воздушной цели предлагается совместно использовать эхо-сигналы цели прямых и отраженных от земли радиоволн в двух разнесенных антеннах. Это предложение обеспечивает измерение двух угловы х координат b и q с помощью только двух разнесенных антенн. Сигналы от приемо-передающей антенны 1 до цели и обратно распространяются следующими возможными путями: 1) антенна 1 - цель - антенна 1; 2) антенна 1 - цель - земля - антенна 1; 3) антенна 1 - земля - цель - антенна 1; 4) антенна 1 - земля - цель - земля -антенна 1; 5) антенна 1 - цель - антенна 2;. 6) антенна 1 - цель - земля - антенна 2; 7) антенна 1 - земля - цель - антенна 2; 8) антенна 1 - земля - цель - земля -антенна 3. То есть одному зондирующему видеоимпульсу соответствует 8 видеоимпульсов эхо-сигнала цели в антеннах 1, 2. При отражении от земли и цели полярность импульсов поля радиоволн изменяется [3]. Полярность видеоимпульсов, принятых антенной 2, еще раз будет изменена устройством вычитания 4. Пути 2) и 3) одинаковы по длине, а видеоимпульсы этих путей складываются при приеме в антенне 1 и образуют один видеоимпульс почти удвоенной амплитуды и положительной полярности. Видеоимпульсы путей 1) и 4) имеют на выходе приемника 6 отрицательную полярность. Видеоимпульсы путей 6) и 7) также складываются в антенне 2 и образуют один импульс, который на выходе приемника 6 имеет отрицательную полярность. Видеоимпульсы путей 5) и 8) имеют на выходе приемника положительную полярность. В результате на выходе приемника 6 одному зондирующему видеоимпульсу соответствует 6 видеоимпульсов эхо-сигнала цели, три из которых имеют положительную полярность, а три други х отрицательную полярность. Взаимное положение этих видеоимпульсов зависит от угловых координат цели q и b. В зависимости от азимутального угла цели b возможны четыре варианта взаимного расположения положительных и отрицательных видеоимпульсов на выходе приемника 6, которые схематически показаны в таблице. В этой же таблице для каждого варианта взаимного расположения этих видеоимпульсов представлены соотношения, определяющие время запаздывания tп1 tп2, t п3 положительных импульсов и время запаздывания to1 , to2, t o3 отрицательных импульсов эхо-сигнала на выходе приемника 6 относительно зондирующего видеоимпульса. Там же указана нумерация соотношений. В соотношениях таблицы tз - время запаздывания видеоимпульса прямой волны (путь 1) в антенне 1 относительно зондирующего видеоимпульса; h - высота подъема антенн над землей; d - разнос антенн по горизонтали. Соотношения (8 - 19) таблицы получены из известной геометрии антенной системы для указанных четырех возможных вариантов расположения видеоимпульсов эхосигналов цели. Предлагается измерить время запаздывания tп1 tп2, tп3 to1,, to2, t o3 положительных и отрицательных видеоимпульсов эхо-сигналов на выходе приемника 6 относительно зондирующего видеоимпульса и по результатам этих измерений определить азимут b и угол места цели по соотношениям (2 - 7), которые получены из соотношений (8 - 19) таблицы q, b. Для обеспечения возможности измерения времени запаздывания tп1 tп2 , tп3 to1,, to2, t o3 положительных и отрицательных видеоимпульсов эхо-сигналов цели с выхода приемника 6 целесообразно отделить положительные импульсы от отрицательных с помощью широкополосных диодов 7, 8 противоположной полярности и проводить измерения двумя различными измерителями 9, 10. Это позволяет упростить процесс измерений и избежать возможных ошибок. Вычисление b и q по соотношениям (2 - 7) осуществляют с помощью вычислителя 11. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Антенна 1, 2, антенный переключатель 3, передатчик 5 и приемник 6 выполнены для изучения и приема наносекундных видеоимпульсных сигналов и аналогичны соответствующим устройствам прототипа. Антенны 1, 2 одинаковы и имеют широкие диаграммы направленности по азимуту и углу места, которые охватывают весь рабочий сектор радиолокатора в угломестной и азимутальной плоскостях. Принципиально необходимо, чтобы эти антенны облучали земную поверхность. Устройство вычитания 4 может быть выполнено в виде последовательного соединения выходов фидерных линий от антенны 2 и антенного переключателя 3. Диоды 7, 8 подключены к выходу приемника 6 параллельно в противоположной полярности должны иметь широкую полосу пропускания. Измерители 9, 10 могут быть выполнены, например, в виде индикаторов наносекундных видеоимпульсов и аналогичны соответствующим устройствам прототипа. Вычислитель 11 представляет собой микро-ЭВМ для вычисления r, q, b по соотношениям (2 - 7). Динамика работы предложенного устройства осуществляется следующим образом. Антенна 1 излучает зондирующий сигнал в виде периодической последовательности видеоимпульсов поля радиоволн положительной полярности и наносекундной длительности без несущей частоты. Радиоволны распространяются от антенны до цели и обратно к антеннам 1, 2 по 8 различным путям, отражаясь от земли и цели. При каждом отражении полярность видеоимпульса поля радиоволн изменяется. Антенны 1, 2 принимают также пассивную помеху от земли, представляющую протяженный сигнал отрицательной полярности, длительность которого значительно больше длительности видеоимпульса эхо-сигнала цели. Устройство вычитания 4 вычитает сигнал антенны 2 из сигнала антенны 1. При этом на выходе устройства вычитания 4 пассивная помеха от земли будет подавлена, а видеоимпульсы эхо-сигналов цели не будут подавлены, так как эти видеоимпульсы приходят к антеннам 1, 2 в разное время. В результате на выходе приемника 6 одному зондирующему видеоимпульсу будет соотве тство вать 6 видеоимпульсов эхо-сигналов цели, три из которых положительны, а три други х отрицательны. Время запаздывания этих видеоимпульсов содержит информацию о трех координатах цели r, q, b. Положительные и отрицательные видеоимпульсы эхо-сигнала с выхода приемника 6 разделяют с помощью диодов 7, 8. Измеряют время запаздывания tп1 tп2, tп3 to1,, to2 , to3 положительных и отрицательных видеоимпульсов эхо-сигнала цели относительно зондирующего видеоимпульса. Координаты цели r, q, b вычисляют по результатам этих измерений с помощью вычислителя 11 по соотношениям (2 7). Таким образом, предложенное устройство устраняет отмеченные недостатки аналогов и прототипа и обеспечивает измерение трех координат воздушной цели на фоне пассивных помех от земли. Для этого достаточно двух разнесенных антенн с широкими диаграммами направленности и не требуется сканировать антенну по углу места.
ДивитисяДодаткова інформація
Назва патенту англійськоюThree-coordinate sequential radar
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюТрех координатный секвентный радиолокатор
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 13/06
Мітки: секвентний, трикоординатний, радіолокатор
Код посилання
<a href="https://ua.patents.su/4-17457-trikoordinatnijj-sekventnijj-radiolokator.html" target="_blank" rel="follow" title="База патентів України">Трикоординатний секвентний радіолокатор</a>
Секвентний радіолокатор для виявлення маловисотної цілі
Номер патенту: 17461
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: виявлення, секвентний, радіолокатор, маловисотної, цілі
Формула / Реферат:
Секвентный радиолокатор для обнаружения маловысотной цели, содержащий передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места q со своей антенной системой, на выходе приемника радиолокатора...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: секвентного, місця, цілі, наземного, кута, вимірювання, радіолокатора, спосіб
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Бортовий секвентний радіолокатор для виявлення підземних об’єктів
Номер патенту: 17464
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: бортовий, підземних, секвентний, виявлення, радіолокатор, об'єктів
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения подземных объектов, содержащий антенную систему из двух одинаковых антенн, антенный переключатель, передатчик видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что антенная система выполнена из двух приемо-передающих антенн вертикальной поляризации, оси антенн направлены в противоположные стороны от вертикали под углом в полтора раза больше...
Секвентний радіолокатор з супергетеродинним приймачем
Номер патенту: 17469
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: супергетеродинним, радіолокатор, секвентний, приймачем
Формула / Реферат:
Секвентный радиолокатор с супергетеродинным приемником, содержащий передатчик периодических импульсных зондирующих сигналов, приемо-передающую антенну с антенным переключателем, индикатор и супергетеродинный приемник с усилителем, гетеродином, смесителем и амплитудным диодным детектором, отличающийся тем, что смеситель выполнен по мостовой схеме из четырех высокочастотных широкополосных диодов с сопротивлением нагрузки, связанным с диодным...
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: поверхні, виявлення, секвентний, землі, цілей, радіолокатор, рухомих, бортовий
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Попередній патент: Рлс виявлення літака
Наступний патент: Спосіб одержання фторвмісного високотемпературного надпровідника
Випадковий патент: Машина з кулісним механізмом