Платформа з автоматичним регулюванням попереднього напруження
Формула / Реферат
1. Платформа для використання в процесі спорудження мостів, віадуків та інших конструкцій, яка містить суттєво подовжену основну конструкцію; щонайменше один напружуваний трос, не зчеплений з бетоном з одним кінцем, прикріпленим до основної конструкції за допомогою першого анкерного пристрою, і протилежним кінцем напружуваного троса, не зчепленого з бетоном, прикріпленим до різних місцеположень на основній конструкції за допомогою другого анкерного пристрою;
виконавчий механізм, який постійно розташований між основною конструкцією і напружуваним тросом, не зчепленим з бетоном;
щонайменше один блок датчиків, призначений для реєстрації вимірювань фізичних змін в основній конструкції і передачі вказаних вимірювань до електронного інтерфейсу, який перетворює їх у зчитувані дані, які приймаються контролером, який регулює розтягнення виконавчого механізму, так що вказаний виконавчий механізм розтягується або втягується для того, щоб збільшити або зменшити, відповідно, натяг напружуваного троса, не зчепленого з бетоном, відповідно до збільшення або зменшення навантаження або внутрішніх сил, які діють на основну конструкцію.
2. Платформа за п. 1, в якій контролер виконаний з можливістю регулювання інтенсивності і спрямування сил, які прикладаються виконавчим механізмом на напружуваний трос, не зчеплений з бетоном.
3. Платформа за п. 1, в якій напружуваний трос, не зчеплений з бетоном, виконаний внутрішнім або зовнішнім відносно контуру основної конструкції.
4. Платформа за п. 1, в якій напружуваний трос, не зчеплений з бетоном, має лінійне або багатолінійне розташування.
5. Платформа за п. 1, в якій виконавчий механізм являє собою щонайменше одну висувну стійку з першим кінцем, з можливістю відведення з'єднаним з опорою в контакті з напружуваним тросом, не зчепленим з бетоном, і з другим кінцем, з можливістю відведення з'єднаним з основною конструкцією.
6. Платформа за п. 5, в якій стійка виконана з можливістю відведення або переміщення за допомогою поступального руху або обертання.
7. Платформа за п. 1, в якій вона виконана з можливістю забезпечення опори для опалубки за місцем відливання конструкцій або для сегментів та мостових ферм, що заздалегідь відливаються, або навіть для інших конструктивних елементів.
8. Платформа за п. 1, в якій виконавчий механізм виконаний з можливістю зміщення першого або другого анкерного пристрою у напрямку до основної конструкції або від неї так, що відповідно зменшується або збільшується натяг напружуваного троса, не зчепленого з бетоном.
9. Спосіб забезпечення наявної раніше платформи системою саморегулювання попереднього напруження, який відрізняється тим, що платформу, яка була раніше, оснащують елементами за п. 1.
Текст
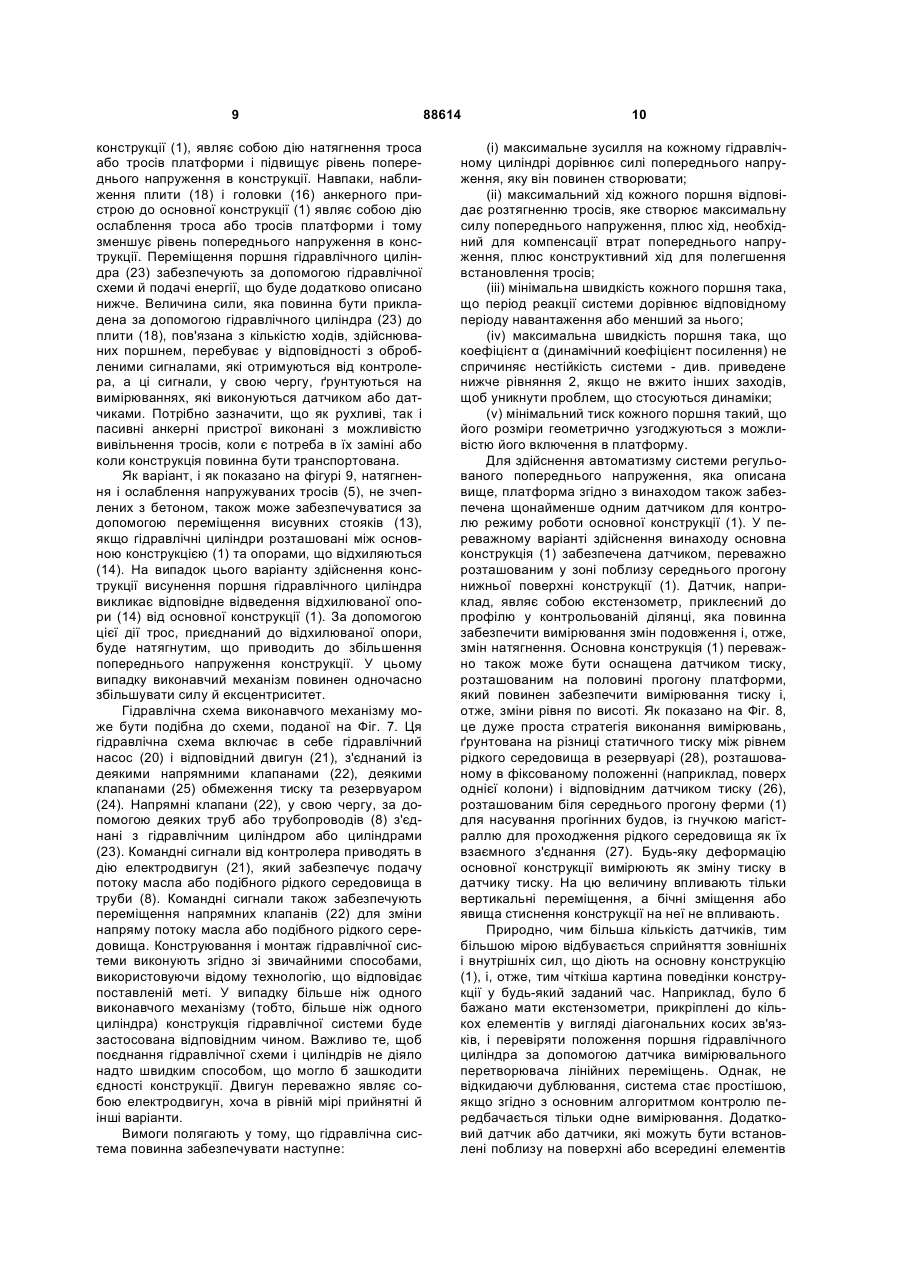
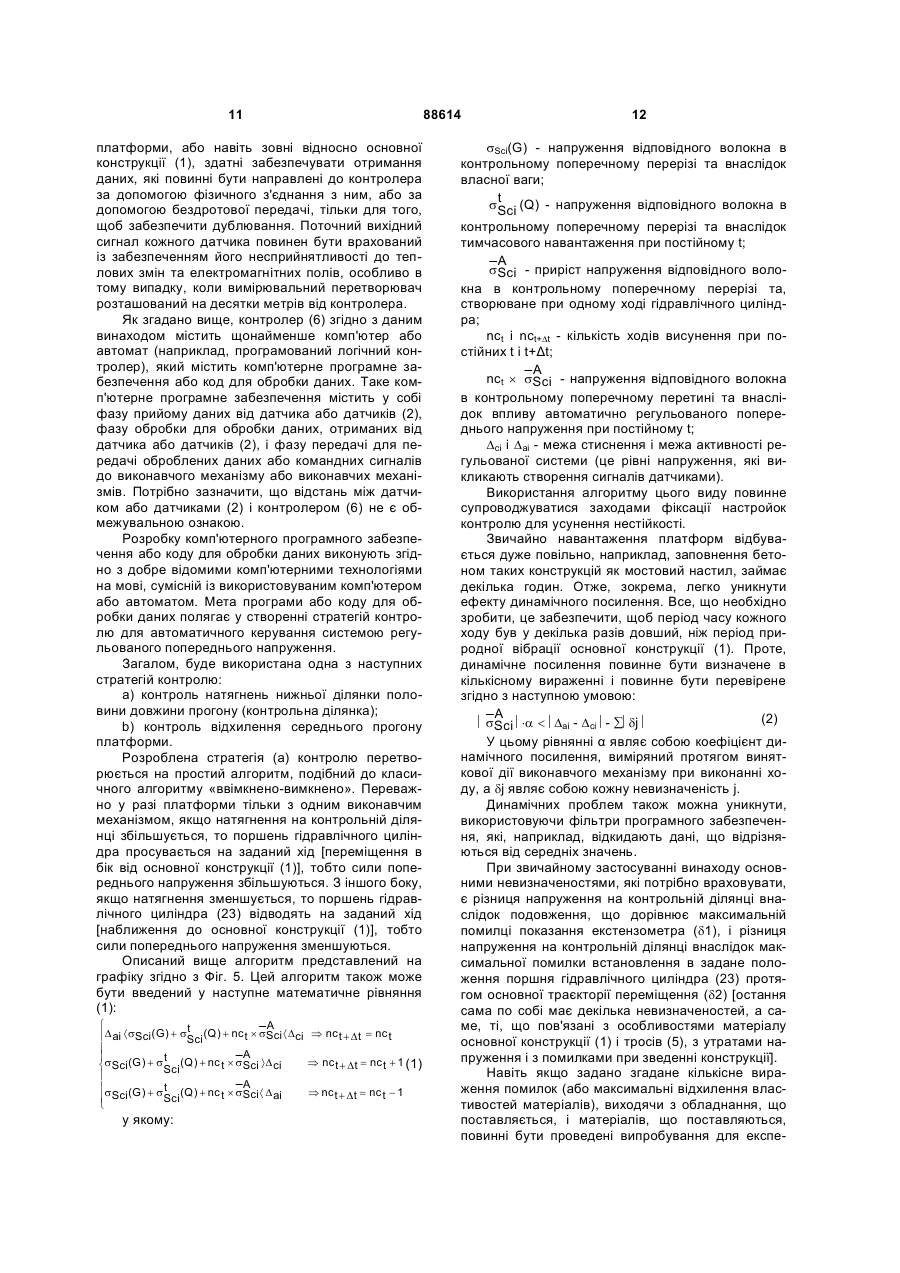
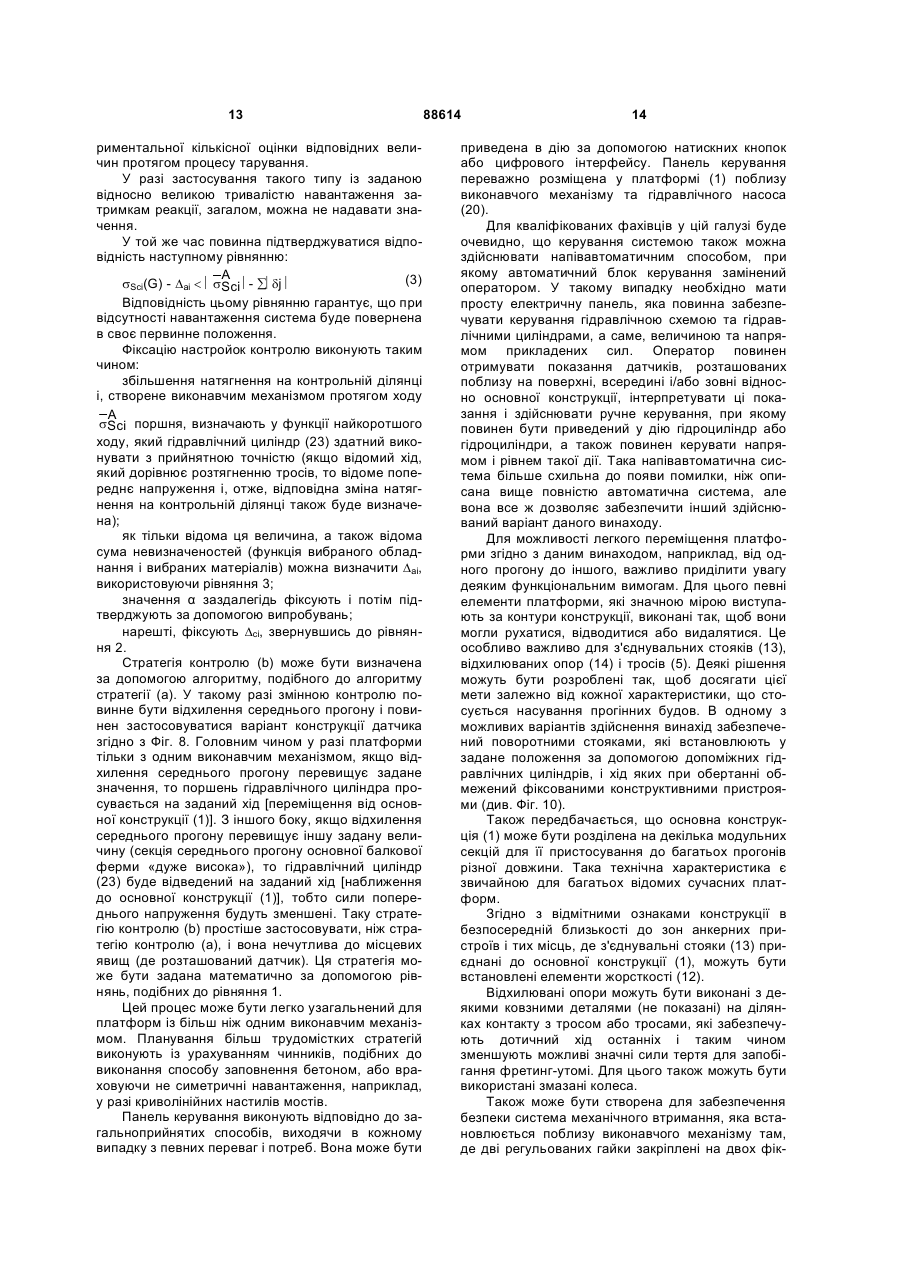
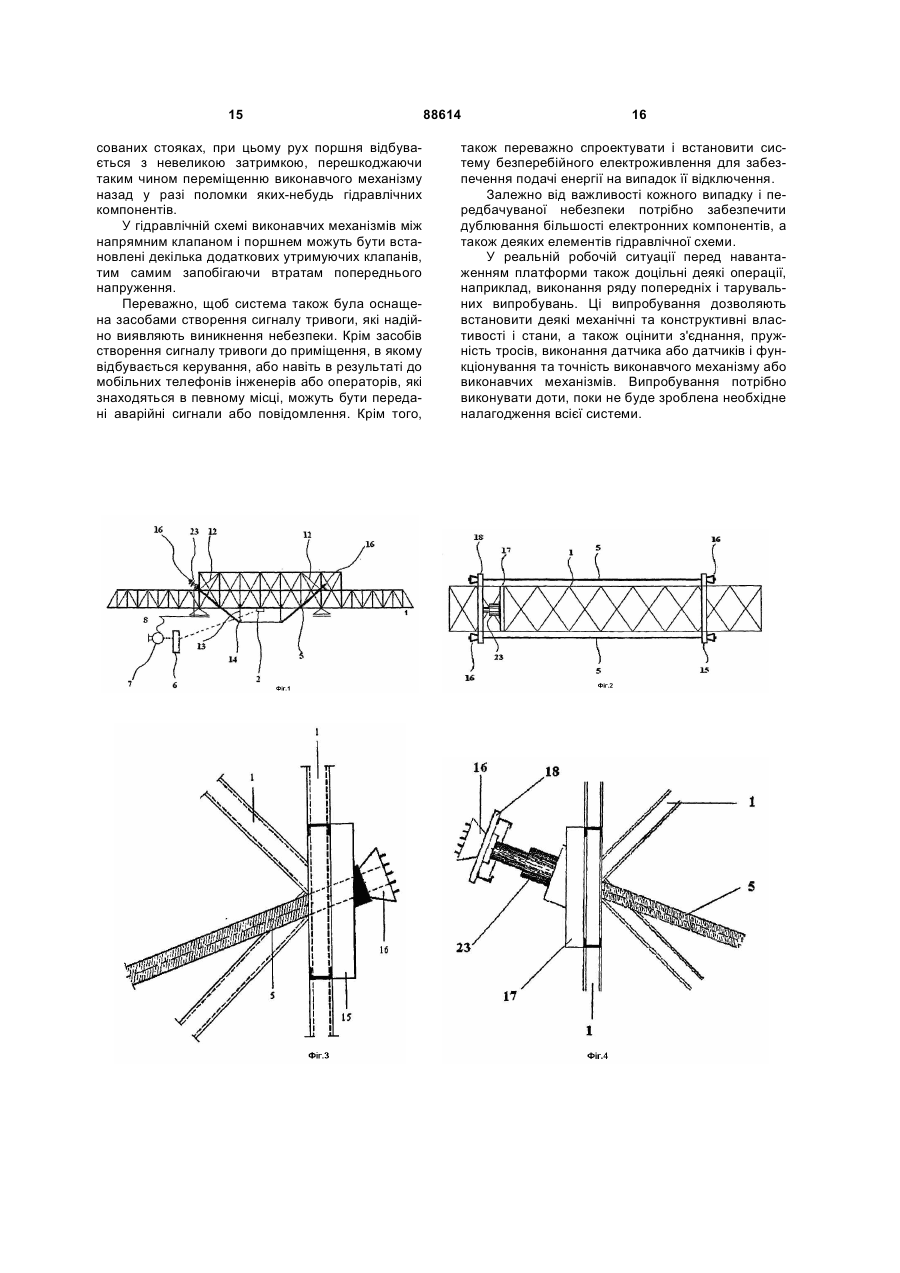
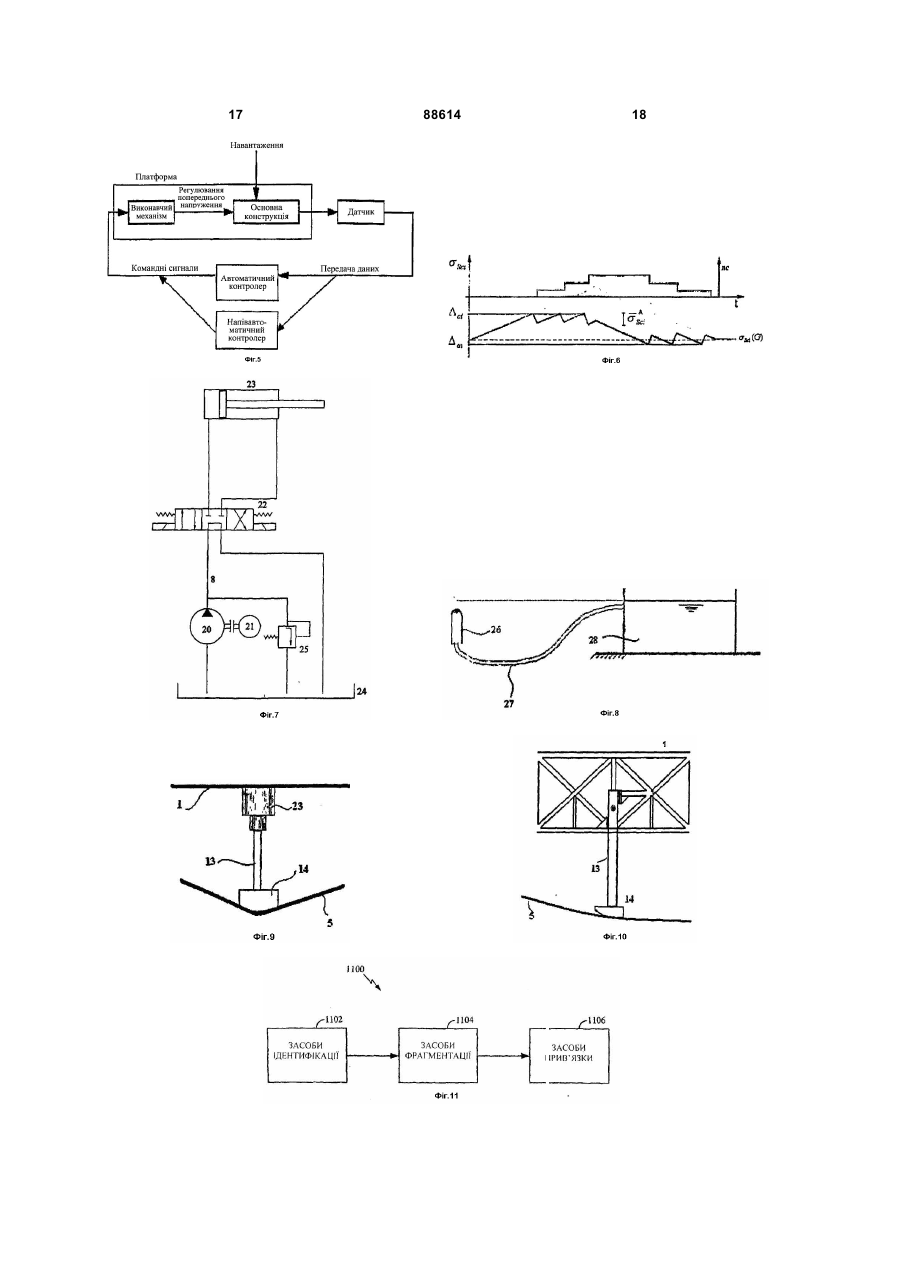
1. Платформа для використання в процесі спорудження мостів, віадуків та інших конструкцій, яка містить суттєво подовжену основну конструкцію; щонайменше один напружуваний трос, не зчеплений з бетоном з одним кінцем, прикріпленим до основної конструкції за допомогою першого анкерного пристрою, і протилежним кінцем напружуваного троса, не зчепленого з бетоном, прикріпленим до різних місцеположень на основній конструкції за допомогою другого анкерного пристрою; виконавчий механізм, який постійно розташований між основною конструкцією і напружуваним тросом, не зчепленим з бетоном; щонайменше один блок датчиків, призначений для реєстрації вимірювань фізичних змін в основній конструкції і передачі вказаних вимірювань до електронного інтерфейсу, який перетворює їх у зчитувані дані, які приймаються контролером, який регулює розтягнення виконавчого механізму, так що вказаний виконавчий механізм розтягується або втягується для того, щоб збільшити або зменшити, відповідно, натяг напружуваного троса, не C2 2 (19) 1 3 льного риштування, що спираються на ґрунт. Однак обставина, яка перешкоджає їх поширенішому використанню, полягає в тому, що вони вимагають великих капітальних вкладень, які стосуються матеріалів і витрат праці на їх споруду. Хоч наявні платформи можуть використовуватися повторно, щодо них також досить звичайною є вимога повторного пристосування, зокрема, коли згідно з проектом потрібно, щоб вони витримували більш високе навантаження порівняно з тим, для якого вони були призначені спочатку. Таке пристосування саме по собі є процесом, який вимагає досить значних витрат часу і коштів, і який звичайно затримує темпи ведення будівництва. Використання відомих платформ також містить у собі серйозну небезпеку. Це пояснюється тим, що вони являють собою конструкції, призначені для утримання багатьох постійних і змінних навантажень, що може призвести до великої кількості деформацій і напружень, які ослаблюють конструкцію і в результаті можуть викликати її обвалення. У минулому відбувалися нещасні випадки. Раніше для посилення і зміцнення бетонних балкових ферм використовували троси або елементи заздалегідь напружуваної арматури, що описано в заявках на патент WO 00/68508 (Interconstec Co. Ltd), WO 02/28168 (Interconstec Co. Ltd) і WO 01/27406. Проте ці конструкції вимагають впровадження зовнішніх інструментів для збільшення або зменшення натягнення тросів. Крім того, у відповідь на навантаження, прикладені до конструкції у будь-який заданий час, регулювання не виконувалося, а було включене в стратегію періодичного технічного обслуговування платформ. Основне завдання даного винаходу полягає у створенні платформи з автоматичною або напівавтоматичною системою для регулювання попереднього напруження конструкції платформи згідно із зовнішніми впливами, прикладеними до неї, коли відбувається навантаження. Ще одне завдання даного винаходу полягає у створенні платформи, більш ефективної відносно конструкції, ніж відомі платформи, а точніше у створенні платформи, яка має систему, здатну протидіяти деформаціям і напруженням конструкції платформи відразу ж після їх виявлення, забезпечуючи таким чином компенсацію, яка гарантує необхідні експлуатаційні характеристики. Ще одне завдання даного винаходу полягає у створенні платформи, яка може втримувати більш високе навантаження, ніж відома платформа з еквівалентними розміром і масою конструкції. Нарешті, додаткове завдання даного винаходу полягає у створенні системи, яка може використовуватися для посилення об'єктів у вигляді старих і нових платформ для насування прогінних будов. Згідно з широким аспектом даного винаходу пропонується платформа для використання в процесі спорудження мостів, віадуків та інших конструкцій, при цьому платформа містить: основну конструкцію, яка несе навантаження; щонайменше, один напружуваний трос, не зчеплений із бетоном; перший анкерний пристрій для кріплення 88614 4 одного кінця напружуваного троса, не зчепленого з бетоном, до конструкції, і другий анкерний пристрій для кріплення протилежного кінця напружуваного троса, не зчепленого з бетоном, до конструкції; відрізняється тим, що має щонайменше один датчик, призначений для вимірювання фізичної зміни основної конструкції, електронний інтерфейс, який перетворює вимірювання на зчитувані дані і передає ці дані до контролера; при цьому контролер виконаний із можливістю приведення в дію виконавчого механізму, який розташований між конструкцією і напружуваним тросом, не зчепленим з бетоном, і який може збільшити або зменшити натягнення троса згідно з отриманими вимірюваннями. Напружуваний трос, не зчеплений з бетоном, може бути внутрішнім або зовнішнім стосовно контуру основної конструкції і може допускати його лінійне або нелінійне розташування. У тому випадку, коли використовують більше ніж один трос, може бути комбінація із внутрішніх і зовнішніх тросів, кінці яких кріплять окремо за допомогою певних анкерних пристроїв, причому ці анкерні пристрої з'єднані з конструктивними елементами, які можуть кріпити більше ніж один анкерний пристрій. Такі конструктивні елементи звичайно являють собою зміцнені плити. Обмежувальна умова, загалом, полягає лише в тому, щоб розташування тросів не входило в суперечність ні з конструкцією, ні з процесом ведення будівництва. Як згадано вище, основну конструкцію контролюють за допомогою щонайменше одного датчика, розташованого поблизу, на поверхні, або всередині елемента платформи, або він навіть може знаходитися зовні основної конструкції. Загалом, місце розташування датчика або датчиків не має важливого значення за умови, що вони можуть точно вимірювати будь-які задані фізичні зміни на основній конструкції під час її використання. Вимірювання, які можуть бути використані для обчислення величини і/або напряму сили, прикладеної за допомогою виконавчого механізму, можуть, наприклад, являти собою вимірювання зміщень, поворотів, деформацій, рівнів навантаження, напружень, подовжень або тиску. Платформу також переважно оснащують одним або більше допоміжними датчиками для вимірювання температур і в результаті для вимірювання швидкостей та прискорень. Отримати правильні результати дозволяють багато видів датчиків, при цьому датчик або датчики можуть являти собою, наприклад, перетворювач тиску, екстензометр, вимірювальний перетворювач лінійних переміщень, лазерний датчик або гальванічний елемент. Датчик може бути з'єднаний із контролером безпосередньо або через ланцюг інтерфейсу, який може включати в себе підсилювач, фільтрувальний або перетворювальний пристрої. Переважно, щоб деякі перетворювачі були використані зі стандартними виходами (наприклад, 4-20 мА), не вимагаючи при цьому додаткових елементів інтерфейсу. Передача даних або сигналів у даному винаході може бути забезпечена або за допомогою фізичного з'єднання, або за допомогою бездротової технології, а точніше за допомогою електрич 5 ної проводки, оптико-волоконного зв'язку, радіочастот, інфрачервоного випромінювання, технології Wi-Fi або Bluetooth™. У разі бездротової технології, яка використовується для передачі даних або сигналів між датчиком (датчиками) і контролером, та між контролером і виконавчим механізмом (виконавчими механізмами), необхідно забезпечити ці елементи відповідними пристроями для передачі та прийому даних. Контролер згідно з даним винаходом містить щонайменше один комп'ютер або автомат, здатний забезпечувати прогін щонайменше програмного засобу або коду для обробки даних. Програмний засіб або код для обробки даних може отримувати дані від датчика або від кожного датчика, обробляти дані, отримані від датчика або від кожного датчика, і передавати оброблені дані у вигляді командних сигналів щонайменше до одного виконавчого механізму. Такі командні сигнали забезпечують приведення в дію виконавчого механізму або виконавчих механізмів, а це веде до того, що вони забезпечують точне збільшення або зменшення натягнення напружуваного троса, не зчепленого з бетоном. Переважно, щоб встановлені в контролері програмний засіб або код для обробки даних містили щонайменше три підпрограми, а саме, програму випробувань, програму навантаження і програму розвантаження. Програма випробувань включає в себе базовий алгоритм, який використовується для безпосереднього сприяння розтягненню й ослабленню тросів, і при цьому вона забезпечує проведення перевірок тарування і пристосування до технічного обслуговування. Програма навантаження включає в себе алгоритм, який відтворює стратегію керування, яка буде пристосована для конкретної платформи, що розглядається, в фазі навантаження (наприклад, під час заповнення бетоном). Програма розвантаження включає в себе алгоритм, який відтворює повернення виконавчого механізму в його положення спокою (використовується, наприклад, тоді, коли настил моста піддають попередньому напруженню). Як згадано вище, під час прийому командних сигналів від контролера буде забезпечено переміщення виконавчого механізму або виконавчих механізмів. Командні сигнали сприяють тому, що виконавчий механізм або виконавчі механізми будуть забезпечувати необхідну величину сили і/або її відповідний напрям. Тому виконавчий механізм або виконавчі механізми відповідає/відповідають за зміну натягнення напружуваного троса або тросів, не зчеплених з бетоном, і таким чином регулюють попереднє напруження основної конструкції. Для кваліфікованих фахівців у цій галузі буде очевидно, що збільшення або зменшення натягнення троса буде/повинно відповідати необхідності протидіяти внутрішнім силам, які створюються в конструкції зовнішніми впливами. У тому випадку, якщо є більше ніж один трос, натягнення тросів може бути посилене або ослаблене погоджено або незалежно один від одного. Така характеристика забезпечує можливість регулювання попереднього напруження в певних частинах основної конструкції. 88614 6 В інших, менш сприятливих варіантах даного винаходу, функцію контролера може виконувати оператор, який здійснює керування за допомогою електронної панелі керування, яка дозволяє приводити в дію виконавчий механізм або виконавчі механізми. У цьому варіанті оператор отримує дані, які передаються від датчика або датчиків, та інтерпретує їх. Залежно від зчитування оператор надалі забезпечує переміщення виконавчого механізму або виконавчих механізмів для здійснення впливу на основну конструкцію сил самоврівноваження. Таке напівавтоматичне регулювання попереднього напруження конструкції буде не таким точним, як у випадку повністю автоматичного контролера, і, отже, не таким безпечним і надійним. Воно також викликає необхідність постійного керування оператором виконавчим механізмом або виконавчими механізмами протягом значних періодів часу, які досягають декількох годин, наприклад, протягом заповнення настилу моста бетоном. Також потрібно зазначити, що даний винахід передбачає оснащення системою автоматичного регулювання попереднього напруження та існуючих платформ. Цей спосіб виконують за допомогою оснащення існуючої платформи згаданими вище важливими елементами та системою згідно з винаходом. Велика перевага даного винаходу полягає в тому, що він забезпечує можливість застосування попереднього напруження значної величини без виникнення небажаних деформацій в основній конструкції, коли не прикладені зовнішні навантаження. Якщо попереднє напруження такої величини було б застосоване, використовуючи відоме «фіксоване» попереднє напруження без прикладеного зовнішнього навантаження, то основна конструкція була б зруйнована «зверху вниз». Крім того, даний винахід забезпечує значне зменшення втрат попереднього напруження. Платформа з автоматичним регулюванням попереднього напруження має значно зменшені відхилення середнього прогону, оскільки регулювання попереднього напруження дозволяє компенсувати основне навантаження. Хоч попереднє напруження включає в себе напруження стиснення, з тієї ж самої причини, яка вказувалась раніше, згинальні переміщення на основній конструкції значно зменшені, що приводить до зменшення максимальних напружень в елементах основної конструкції. Таким чином, секції з конструктивними елементами можуть бути значно зменшені, забезпечуючи отримання більш легкої та більш функціональної платформи. Крім того, така платформа також економічно більш ефективна, ніж відомі наявні платформи, оскільки вона забезпечує можливість значно більшого повторного використання однієї платформи. З опису цього патенту буде очевидно, що платформа з можливістю автоматичного регулювання попереднього напруження може бути використана в далеко більшій кількості ситуацій, ніж відомі платформи, завдяки її пристосованості до значно більшої кількості діапазонів рівнів навантажень (або 7 діапазонів прогонів) без необхідності значних додаткових посилень. Ще одна значна перевага полягає в тому, що режим роботи конструкції платформи перебуває під безперервним контролем, при цьому небезпечним деформаціям або натягненням, які викликані зовнішнім впливом, буде надана негайна протидія і по них буде ухвалено відповідне рішення. Коли використовують дублювання, головним чином відносно електронних компонентів або деяких механічних пристроїв, то у разі виходу з ладу будьякого компонента, це не вплине на безпеку платформи. Потрібно зазначити, що термін «попереднє напруження» в тому значенні, в якому він тут використовується, передбачає вплив на конструкцію сім'ї самозрівноважувальних сил, які будуть протидіятивнутрішнім силам, що створюються в конструкції зовнішніми впливами. Суть винаходу пояснюється на кресленнях, де: на Фіг. 1 представлений спрощений бічний вигляд варіанту здійснення даного винаходу, на якому показані основні елементи, що складають винахід; на Фіг. 2 представлений схематичний вигляд у плані варіанту здійснення конструкції платформи згідно з Фіг. 1; на Фіг. 3 представлений кінець напружуваного троса, не зчепленого з бетоном, прикріплений до основної конструкції, використовуючи анкерне кріплення, яке знаходиться в пасивному/нерухомому стані; на Фіг. 4 представлений кінець напружуваного троса, не зчепленого з бетоном, прикріплений до основної конструкції, використовуючи анкерне кріплення, яке знаходиться в активному/рухомому стані за допомогою гідроциліндра, розташованого між ними; на Фіг. 5 представлена схематична діаграма послідовності дій при можливому процесі автоматичного керування згідно з даним винаходом; на Фіг. 6 представлена схема можливого здійснення алгоритму керування згідно з даним винаходом; на Фіг. 7 представлене спрощене зображення гідравлічної схеми; на Фіг. 8 представлене схематичне зображення замкненого потоку рідкого середовища, в яке введений датчик тиску; на Фіг. 9 представлене спрощене зображення висувного з'єднувального стояка та відхилюваної опори; на Фіг. 10 представлене спрощене зображення іншого варіанту здійснення конструкції системи (пересувної за допомогою обертання) з пересувним стояком і відхилюваною опорою. Нижче приведено докладний опис винаходу з посиланнями на конкретні переважні варіанти його здійснення та на згадані вище фігури. Опис варіантів здійснення конструкції та фігур представлений лише як приклад і його не потрібно розглядати як обмеження обсягу винаходу, який визначений у наведених пунктах формули винаходу. Як показано на Фіг. 1, створена платформа, що містить основну конструкцію (1), утворену дво 88614 8 ма зовнішніми секціями й однією середньою секцією. Дві зовнішні секції, які призначені для сприяння процесу насування прогінних будов, нижчі по висоті, ніж середня секція, яка призначена для опорної опалубки та основних навантажень. Основна конструкція являє собою наскрізну коробчасту ферму, яка має вигляд, подібний до показаного на Фіг. 1. Місце знаходження опор визначене за типовою будівельною технологією, коли кожна ділянка заповнення бетоном, яка має одну й ту ж довжину в прогоні конструкції, починається на відстані, що приблизно становить 1/5 прогону від передньої опори попередньої ділянки. Основна конструкція (1) оснащена двома зовнішніми тросами (5), по одному з кожної подовжньої сторони конструкції. Троси з видимих причин не повинні бути зчеплені з бетоном і можуть складатися з однієї сталки або великої кількості сталок. Напружувані, не зчеплені з бетоном троси, можуть бути забезпечені пластиковими трубками, заповненими густим мастилом, або можуть бути виконані згідно з іншими відомими рішеннями. Ексцентриситет кожного зовнішнього троса (5) забезпечують за допомогою двох віддалених одна від одної зовнішніх відхилюваних опор (14), які втримуються за допомогою двох відповідних з'єднувальних стояків (13). Кожний з'єднувальний стояк (13) має перший кінець, з'єднаний з однією відхилюваною опорою (14), і другий кінець, з'єднаний з основною конструкцією (1). З'єднувальні стояки (13) переважно виконані всувними (за допомогою обертання) або висувними для сприяння процесу насування прогінних будов (див. Фіг. 10). Кожний кінець обох тросів (5) прикріплений до основної конструкції (1) за допомогою двох анкерних пристроїв. Перші кінці обох зовнішніх тросів (5) прикріплені до основної конструкції за допомогою фіксованих або «пасивних» відомих кріпильних пристроїв. Як показано на Фіг. 3, ці кріпильні пристрої складаються з головок (16) відомих кріпильних пристроїв, які прикріплені до міцних плит (15), постійно з'єднаних з основною конструкцією (1). Протилежні кінці обох тросів (5) прикріплені до рухомого анкерного пристрою згідно з даним винаходом. Як показано на Фіг. 4, рухомий анкерний пристрій згідно з даним винаходом містить головку (16) відомого анкерного пристрою, яка прикріплена до міцної плити (18), прикріпленої до одного гідравлічного циліндра (23). Гідравлічний циліндр прикріплений до міцної протидійної плити (17), яка постійно з'єднана з основною конструкцією (1). Потрібно підкреслити, що можливі й інші варіанти здійснення конструкції, наприклад, протидійна плита (17) може мати два гідравлічних циліндри, встановлених по бічним сторонам, а троси можуть знаходитися в середній секції, або, якщо потрібна певна кількість тросів, яка дорівнює кількості виконавчих механізмів, то вони можуть проходити через них (порожнисті циліндри згідно з відомим рівнем техніки). Переміщення поршня гідравлічного циліндра (23), яке може бути здійснене за допомогою елементарних ходів, які штовхають плиту (18) і головку (16) анкерного пристрою в бік від основної 9 конструкції (1), являє собою дію натягнення троса або тросів платформи і підвищує рівень попереднього напруження в конструкції. Навпаки, наближення плити (18) і головки (16) анкерного пристрою до основної конструкції (1) являє собою дію ослаблення троса або тросів платформи і тому зменшує рівень попереднього напруження в конструкції. Переміщення поршня гідравлічного циліндра (23) забезпечують за допомогою гідравлічної схеми й подачі енергії, що буде додатково описано нижче. Величина сили, яка повинна бути прикладена за допомогою гідравлічного циліндра (23) до плити (18), пов'язана з кількістю ходів, здійснюваних поршнем, перебуває у відповідності з обробленими сигналами, які отримуються від контролера, а ці сигнали, у свою чергу, ґрунтуються на вимірюваннях, які виконуються датчиком або датчиками. Потрібно зазначити, що як рухливі, так і пасивні анкерні пристрої виконані з можливістю вивільнення тросів, коли є потреба в їх заміні або коли конструкція повинна бути транспортована. Як варіант, і як показано на фігурі 9, натягнення і ослаблення напружуваних тросів (5), не зчеплених з бетоном, також може забезпечуватися за допомогою переміщення висувних стояків (13), якщо гідравлічні циліндри розташовані між основною конструкцією (1) та опорами, що відхиляються (14). На випадок цього варіанту здійснення конструкції висунення поршня гідравлічного циліндра викликає відповідне відведення відхилюваної опори (14) від основної конструкції (1). За допомогою цієї дії трос, приєднаний до відхилюваної опори, буде натягнутим, що приводить до збільшення попереднього напруження конструкції. У цьому випадку виконавчий механізм повинен одночасно збільшувати силу й ексцентриситет. Гідравлічна схема виконавчого механізму може бути подібна до схеми, поданої на Фіг. 7. Ця гідравлічна схема включає в себе гідравлічний насос (20) і відповідний двигун (21), з'єднаний із деякими напрямними клапанами (22), деякими клапанами (25) обмеження тиску та резервуаром (24). Напрямні клапани (22), у свою чергу, за допомогою деяких труб або трубопроводів (8) з'єднані з гідравлічним циліндром або циліндрами (23). Командні сигнали від контролера приводять в дію електродвигун (21), який забезпечує подачу потоку масла або подібного рідкого середовища в труби (8). Командні сигнали також забезпечують переміщення напрямних клапанів (22) для зміни напряму потоку масла або подібного рідкого середовища. Конструювання і монтаж гідравлічної системи виконують згідно зі звичайними способами, використовуючи відому технологію, що відповідає поставленій меті. У випадку більше ніж одного виконавчого механізму (тобто, більше ніж одного циліндра) конструкція гідравлічної системи буде застосована відповідним чином. Важливо те, щоб поєднання гідравлічної схеми і циліндрів не діяло надто швидким способом, що могло б зашкодити єдності конструкції. Двигун переважно являє собою електродвигун, хоча в рівній мірі прийнятні й інші варіанти. Вимоги полягають у тому, що гідравлічна система повинна забезпечувати наступне: 88614 10 (і) максимальне зусилля на кожному гідравлічному циліндрі дорівнює силі попереднього напруження, яку він повинен створювати; (іі) максимальний хід кожного поршня відповідає розтягненню тросів, яке створює максимальну силу попереднього напруження, плюс хід, необхідний для компенсації втрат попереднього напруження, плюс конструктивний хід для полегшення встановлення тросів; (ііі) мінімальна швидкість кожного поршня така, що період реакції системи дорівнює відповідному періоду навантаження або менший за нього; (iv) максимальна швидкість поршня така, що коефіцієнт α (динамічний коефіцієнт посилення) не спричиняє нестійкість системи - див. приведене нижче рівняння 2, якщо не вжито інших заходів, щоб уникнути проблем, що стосуються динаміки; (ν) мінімальний тиск кожного поршня такий, що його розміри геометрично узгоджуються з можливістю його включення в платформу. Для здійснення автоматизму системи регульованого попереднього напруження, яка описана вище, платформа згідно з винаходом також забезпечена щонайменше одним датчиком для контролю режиму роботи основної конструкції (1). У переважному варіанті здійснення винаходу основна конструкція (1) забезпечена датчиком, переважно розташованим у зоні поблизу середнього прогону нижньої поверхні конструкції (1). Датчик, наприклад, являє собою екстензометр, приклеєний до профілю у контрольованій ділянці, яка повинна забезпечити вимірювання змін подовження і, отже, змін натягнення. Основна конструкція (1) переважно також може бути оснащена датчиком тиску, розташованим на половині прогону платформи, який повинен забезпечити вимірювання тиску і, отже, зміни рівня по висоті. Як показано на Фіг. 8, це дуже проста стратегія виконання вимірювань, ґрунтована на різниці статичного тиску між рівнем рідкого середовища в резервуарі (28), розташованому в фіксованому положенні (наприклад, поверх однієї колони) і відповідним датчиком тиску (26), розташованим біля середнього прогону ферми (1) для насування прогінних будов, із гнучкою магістраллю для проходження рідкого середовища як їх взаємного з'єднання (27). Будь-яку деформацію основної конструкції вимірюють як зміну тиску в датчику тиску. На цю величину впливають тільки вертикальні переміщення, а бічні зміщення або явища стиснення конструкції на неї не впливають. Природно, чим більша кількість датчиків, тим більшою мірою відбувається сприйняття зовнішніх і внутрішніх сил, що діють на основну конструкцію (1), і, отже, тим чіткіша картина поведінки конструкції у будь-який заданий час. Наприклад, було б бажано мати екстензометри, прикріплені до кількох елементів у вигляді діагональних косих зв'язків, і перевіряти положення поршня гідравлічного циліндра за допомогою датчика вимірювального перетворювача лінійних переміщень. Однак, не відкидаючи дублювання, система стає простішою, якщо згідно з основним алгоритмом контролю передбачається тільки одне вимірювання. Додатковий датчик або датчики, які можуть бути встановлені поблизу на поверхні або всередині елементів 11 платформи, або навіть зовні відносно основної конструкції (1), здатні забезпечувати отримання даних, які повинні бути направлені до контролера за допомогою фізичного з'єднання з ним, або за допомогою бездротової передачі, тільки для того, щоб забезпечити дублювання. Поточний вихідний сигнал кожного датчика повинен бути врахований із забезпеченням його несприйнятливості до теплових змін та електромагнітних полів, особливо в тому випадку, коли вимірювальний перетворювач розташований на десятки метрів від контролера. Як згадано вище, контролер (6) згідно з даним винаходом містить щонайменше комп'ютер або автомат (наприклад, програмований логічний контролер), який містить комп'ютерне програмне забезпечення або код для обробки даних. Таке комп'ютерне програмне забезпечення містить у собі фазу прийому даних від датчика або датчиків (2), фазу обробки для обробки даних, отриманих від датчика або датчиків (2), і фазу передачі для передачі оброблених даних або командних сигналів до виконавчого механізму або виконавчих механізмів. Потрібно зазначити, що відстань між датчиком або датчиками (2) і контролером (6) не є обмежувальною ознакою. Розробку комп'ютерного програмного забезпечення або коду для обробки даних виконують згідно з добре відомими комп'ютерними технологіями на мові, сумісній із використовуваним комп'ютером або автоматом. Мета програми або коду для обробки даних полягає у створенні стратегій контролю для автоматичного керування системою регульованого попереднього напруження. Загалом, буде використана одна з наступних стратегій контролю: a) контроль натягнень нижньої ділянки половини довжини прогону (контрольна ділянка); b) контроль відхилення середнього прогону платформи. Розроблена стратегія (а) контролю перетворюється на простий алгоритм, подібний до класичного алгоритму «ввімкнено-вимкнено». Переважно у разі платформи тільки з одним виконавчим механізмом, якщо натягнення на контрольній ділянці збільшується, то поршень гідравлічного циліндра просувається на заданий хід [переміщення в бік від основної конструкції (1)], тобто сили попереднього напруження збільшуються. З іншого боку, якщо натягнення зменшується, то поршень гідравлічного циліндра (23) відводять на заданий хід [наближення до основної конструкції (1)], тобто сили попереднього напруження зменшуються. Описаний вище алгоритм представлений на графіку згідно з Фіг. 5. Цей алгоритм також може бути введений у наступне математичне рівняння (1): A ì t ïD ai á sSci ( G) + sSci (Q) + nc t ´ sSci á Dci Þ nc t + Dt = nc t ï A ï t Þ nc t + Dt = nc t + 1 (1) ísSci (G) + sSci (Q) + nc t ´ sSci ñ D ci ï A ïs (G) + s t (Q) + nc ´ s á D Þ nc t + Dt = nc t - 1 Sci ai t ï Sci Sci î у якому: 88614 12 sSci(G) - напруження відповідного волокна в контрольному поперечному перерізі та внаслідок власної ваги; s t (Q) - напруження відповідного волокна в Sci контрольному поперечному перерізі та внаслідок тимчасового навантаження при постійному t; A sSci - приріст напруження відповідного волокна в контрольному поперечному перерізі та, створюване при одному ході гідравлічного циліндра; nct і nct+Dt - кількість ходів висунення при постійних t і t+Δt; A nct ´ sSci - напруження відповідного волокна в контрольному поперечному перетині та внаслідок впливу автоматично регульованого попереднього напруження при постійному t; Dсі і Dаі - межа стиснення і межа активності регульованої системи (це рівні напруження, які викликають створення сигналів датчиками). Використання алгоритму цього виду повинне супроводжуватися заходами фіксації настройок контролю для усунення нестійкості. Звичайно навантаження платформ відбувається дуже повільно, наприклад, заповнення бетоном таких конструкцій як мостовий настил, займає декілька годин. Отже, зокрема, легко уникнути ефекту динамічного посилення. Все, що необхідно зробити, це забезпечити, щоб період часу кожного ходу був у декілька разів довший, ніж період природної вібрації основної конструкції (1). Проте, динамічне посилення повинне бути визначене в кількісному вираженні і повинне бути перевірене згідно з наступною умовою: A (2) ê sSci ê×a < êDai - Dci ê- åêdj ê У цьому рівнянні α являє собою коефіцієнт динамічного посилення, виміряний протягом виняткової дії виконавчого механізму при виконанні ходу, a dj являє собою кожну невизначеність j. Динамічних проблем також можна уникнути, використовуючи фільтри програмного забезпечення, які, наприклад, відкидають дані, що відрізняються від середніх значень. При звичайному застосуванні винаходу основними невизначеностями, які потрібно враховувати, є різниця напруження на контрольній ділянці внаслідок подовження, що дорівнює максимальній помилці показання екстензометра (d1), і різниця напруження на контрольній ділянці внаслідок максимальної помилки встановлення в задане положення поршня гідравлічного циліндра (23) протягом основної траєкторії переміщення (d2) [остання сама по собі має декілька невизначеностей, а саме, ті, що пов'язані з особливостями матеріалу основної конструкції (1) і тросів (5), з утратами напруження і з помилками при зведенні конструкції]. Навіть якщо задано згадане кількісне вираження помилок (або максимальні відхилення властивостей матеріалів), виходячи з обладнання, що поставляється, і матеріалів, що поставляються, повинні бути проведені випробування для експе 13 риментальної кількісної оцінки відповідних величин протягом процесу тарування. У разі застосування такого типу із заданою відносно великою тривалістю навантаження затримкам реакції, загалом, можна не надавати значення. У той же час повинна підтверджуватися відповідність наступному рівнянню: A (3) sSci(G) - Dai < ê sSci ê- åêdj ê Відповідність цьому рівнянню гарантує, що при відсутності навантаження система буде повернена в своє первинне положення. Фіксацію настройок контролю виконують таким чином: збільшення натягнення на контрольній ділянці і, створене виконавчим механізмом протягом ходу A sSci поршня, визначають у функції найкоротшого ходу, який гідравлічний циліндр (23) здатний виконувати з прийнятною точністю (якщо відомий хід, який дорівнює розтягненню тросів, то відоме попереднє напруження і, отже, відповідна зміна натягнення на контрольній ділянці також буде визначена); як тільки відома ця величина, а також відома сума невизначеностей (функція вибраного обладнання і вибраних матеріалів) можна визначити Dai, використовуючи рівняння 3; значення α заздалегідь фіксують і потім підтверджують за допомогою випробувань; нарешті, фіксують Dci, звернувшись до рівняння 2. Стратегія контролю (b) може бути визначена за допомогою алгоритму, подібного до алгоритму стратегії (а). У такому разі змінною контролю повинне бути відхилення середнього прогону і повинен застосовуватися варіант конструкції датчика згідно з Фіг. 8. Головним чином у разі платформи тільки з одним виконавчим механізмом, якщо відхилення середнього прогону перевищує задане значення, то поршень гідравлічного циліндра просувається на заданий хід [переміщення від основної конструкції (1)]. З іншого боку, якщо відхилення середнього прогону перевищує іншу задану величину (секція середнього прогону основної балкової ферми «дуже висока»), то гідравлічний циліндр (23) буде відведений на заданий хід [наближення до основної конструкції (1)], тобто сили попереднього напруження будуть зменшені. Таку стратегію контролю (b) простіше застосовувати, ніж стратегію контролю (а), і вона нечутлива до місцевих явищ (де розташований датчик). Ця стратегія може бути задана математично за допомогою рівнянь, подібних до рівняння 1. Цей процес може бути легко узагальнений для платформ із більш ніж одним виконавчим механізмом. Планування більш трудомістких стратегій виконують із урахуванням чинників, подібних до виконання способу заповнення бетоном, або враховуючи не симетричні навантаження, наприклад, у разі криволінійних настилів мостів. Панель керування виконують відповідно до загальноприйнятих способів, виходячи в кожному випадку з певних переваг і потреб. Вона може бути 88614 14 приведена в дію за допомогою натискних кнопок або цифрового інтерфейсу. Панель керування переважно розміщена у платформі (1) поблизу виконавчого механізму та гідравлічного насоса (20). Для кваліфікованих фахівців у цій галузі буде очевидно, що керування системою також можна здійснювати напівавтоматичним способом, при якому автоматичний блок керування замінений оператором. У такому випадку необхідно мати просту електричну панель, яка повинна забезпечувати керування гідравлічною схемою та гідравлічними циліндрами, а саме, величиною та напрямом прикладених сил. Оператор повинен отримувати показання датчиків, розташованих поблизу на поверхні, всередині і/або зовні відносно основної конструкції, інтерпретувати ці показання і здійснювати ручне керування, при якому повинен бути приведений у дію гідроциліндр або гідроциліндри, а також повинен керувати напрямом і рівнем такої дії. Така напівавтоматична система більше схильна до появи помилки, ніж описана вище повністю автоматична система, але вона все ж дозволяє забезпечити інший здійснюваний варіант даного винаходу. Для можливості легкого переміщення платформи згідно з даним винаходом, наприклад, від одного прогону до іншого, важливо приділити увагу деяким функціональним вимогам. Для цього певні елементи платформи, які значною мірою виступають за контури конструкції, виконані так, щоб вони могли рухатися, відводитися або видалятися. Це особливо важливо для з'єднувальних стояків (13), відхилюваних опор (14) і тросів (5). Деякі рішення можуть бути розроблені так, щоб досягати цієї мети залежно від кожної характеристики, що стосується насування прогінних будов. В одному з можливих варіантів здійснення винахід забезпечений поворотними стояками, які встановлюють у задане положення за допомогою допоміжних гідравлічних циліндрів, і хід яких при обертанні обмежений фіксованими конструктивними пристроями (див. Фіг. 10). Також передбачається, що основна конструкція (1) може бути розділена на декілька модульних секцій для її пристосування до багатьох прогонів різної довжини. Така технічна характеристика є звичайною для багатьох відомих сучасних платформ. Згідно з відмітними ознаками конструкції в безпосередній близькості до зон анкерних пристроїв і тих місць, де з'єднувальні стояки (13) приєднані до основної конструкції (1), можуть бути встановлені елементи жорсткості (12). Відхилювані опори можуть бути виконані з деякими ковзними деталями (не показані) на ділянках контакту з тросом або тросами, які забезпечують дотичний хід останніх і таким чином зменшують можливі значні сили тертя для запобігання фретинг-утомі. Для цього також можуть бути використані змазані колеса. Також може бути створена для забезпечення безпеки система механічного втримання, яка встановлюється поблизу виконавчого механізму там, де дві регульованих гайки закріплені на двох фік 15 сованих стояках, при цьому рух поршня відбувається з невеликою затримкою, перешкоджаючи таким чином переміщенню виконавчого механізму назад у разі поломки яких-небудь гідравлічних компонентів. У гідравлічній схемі виконавчих механізмів між напрямним клапаном і поршнем можуть бути встановлені декілька додаткових утримуючих клапанів, тим самим запобігаючи втратам попереднього напруження. Переважно, щоб система також була оснащена засобами створення сигналу тривоги, які надійно виявляють виникнення небезпеки. Крім засобів створення сигналу тривоги до приміщення, в якому відбувається керування, або навіть в результаті до мобільних телефонів інженерів або операторів, які знаходяться в певному місці, можуть бути передані аварійні сигнали або повідомлення. Крім того, 88614 16 також переважно спроектувати і встановити систему безперебійного електроживлення для забезпечення подачі енергії на випадок її відключення. Залежно від важливості кожного випадку і передбачуваної небезпеки потрібно забезпечити дублювання більшості електронних компонентів, а також деяких елементів гідравлічної схеми. У реальній робочій ситуації перед навантаженням платформи також доцільні деякі операції, наприклад, виконання ряду попередніх і тарувальних випробувань. Ці випробування дозволяють встановити деякі механічні та конструктивні властивості і стани, а також оцінити з'єднання, пружність тросів, виконання датчика або датчиків і функціонування та точність виконавчого механізму або виконавчих механізмів. Випробування потрібно виконувати доти, поки не буде зроблена необхідне налагодження всієї системи. 17 88614 18 19 Комп’ютерна верстка Л.Литвиненко 88614 Підписне 20 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGantry with auto-adjusting prestressing
Автори англійськоюPACHECO, Pedro, Alvares, Ribeiro do Carmo
Назва патенту російськоюПлатформа с автоматической регулировкой предварительного напряжения
Автори російськоюПашеку Педру Алвареш Рибейру ду Карму
МПК / Мітки
МПК: E01D 21/00
Мітки: платформа, напруження, попереднього, регулюванням, автоматичним
Код посилання
<a href="https://ua.patents.su/10-88614-platforma-z-avtomatichnim-regulyuvannyam-poperednogo-napruzhennya.html" target="_blank" rel="follow" title="База патентів України">Платформа з автоматичним регулюванням попереднього напруження</a>
Спосіб армування та попереднього напруження арматури трубчастих залізобетонних виробів
Номер патенту: 16286
Опубліковано: 15.08.2006
Автор: Погрібний Дмитро Пилипович
МПК: E04G 21/12
Мітки: напруження, трубчастих, арматури, попереднього, виробів, залізобетонних, армування, спосіб
Формула / Реферат:
Спосіб армування та попереднього напруження арматури трубчастих залізобетонних виробів, що включає розміщення у формі спіральної арматури у вигляді соленоїда з його натягненням на упори форми, введення в бетонну суміш феромагнітних елементів, що розміщуються в тілі бетону по напрямках силових ліній магнітного поля, створюваного соленоїдом під час пропускання по ньому електричного струму, який відрізняється тим, що із холоднотягнутого...
Екранований ротор турбомашини з автоматичним регулюванням теплообміну
Номер патенту: 78219
Опубліковано: 15.03.2007
Автори: Худяков Володимир Федорович, Харченко Андрій Олександрович, Салов Микола Миколайович
МПК: F02C 7/12
Мітки: теплообміну, турбомашині, автоматичним, регулюванням, екранований, ротор
Формула / Реферат:
Екранований ротор турбомашини з автоматичним регулюванням теплообміну, що містить вал, з'єднані по периферії лабіринтовими проставками диски з маточинами, екран з додатковими циліндричними ділянками по обидві сторони диска, зміщені до задньої поверхні диска ежекційні канали, підвідні канали у вигляді порожнин і наскрізних циліндричних отворів на периферії екрана, який відрізняється тим, що на верхній і нижній поверхнях ежекційних каналів по...
Осьовий вентилятор з автоматичним регулюванням тиску
Номер патенту: 28878
Опубліковано: 25.12.2007
Автори: Мавродій Сергій Вячеславович, Киклевич Юрій Миколайович, Іванов Сергій Констянтинович
МПК: F04D 27/00, F04D 19/00, F04D 29/46
Мітки: автоматичним, осьовий, тиску, регулюванням, вентилятор
Формула / Реферат:
1. Осьовий вентилятор з автоматичним регулюванням тиску, що містить робоче колесо, напрямний апарат, оздоблений поворотними напрямними лопатками і механізмом повороту напрямних лопаток, який відрізняється тим, що механізм повороту напрямних лопаток кінематично з’єднаний з підпружиненим штоком, переміщуваним за допомогою закріпленої на ньому повітронепроникної перегородки, розташованої в пневмокамері і розділяючої пневмокамеру на передню і...
Обприскувач з автоматичним регулюванням витрати рідини
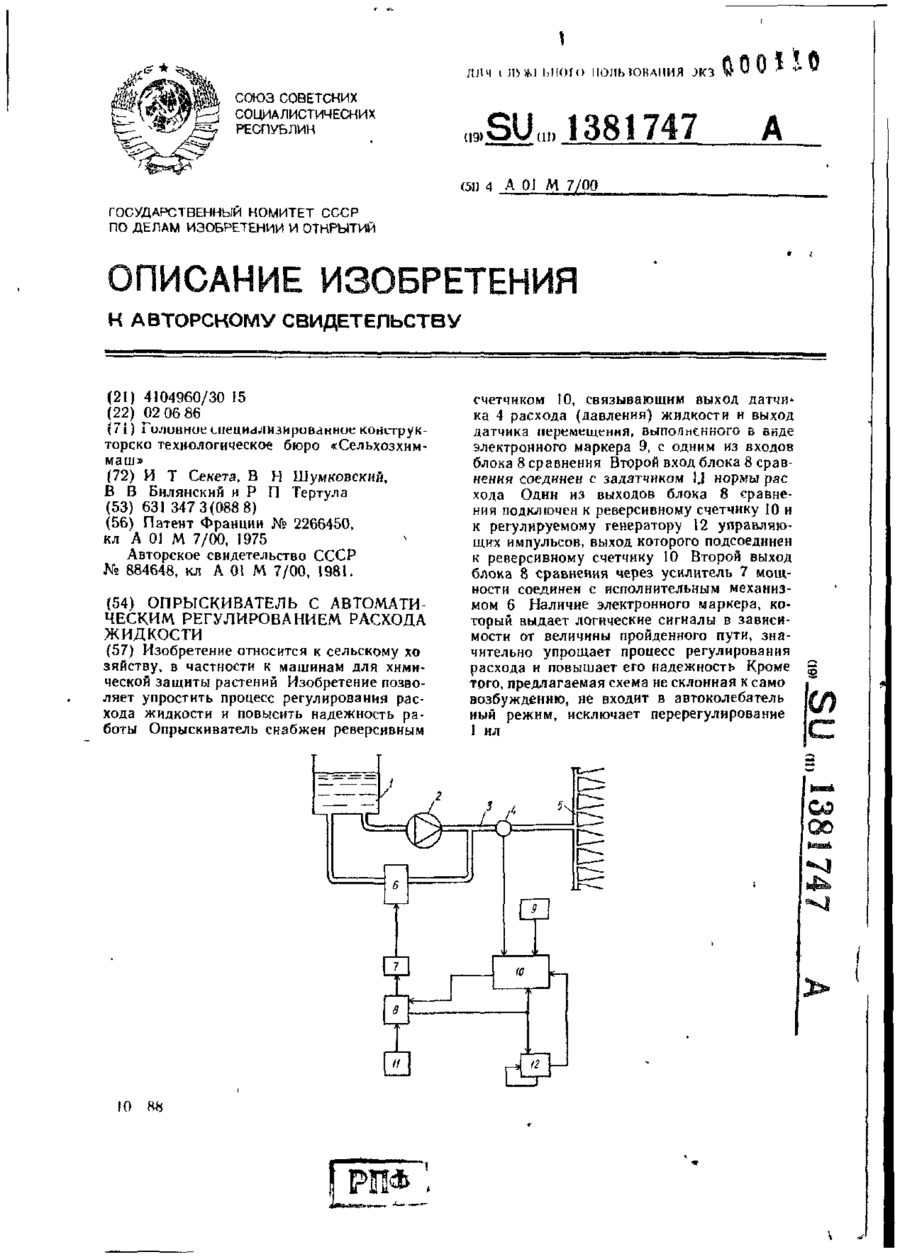
Номер патенту: 11325
Опубліковано: 25.12.1996
Автори: Секета Ігор Тадейович, Білянський Василь Володимирович, Шумковський Валерій Миколайович, Тертула Роман Петрович
МПК: A01M 7/00
Мітки: рідини, обприскувач, автоматичним, регулюванням, витрати
Формула / Реферат:
Опрыскиватель с автоматическим регулированием расхода жидкости, содержащий резервуар для жидкости, насос, нагнетательную магистраль с датчиком расхода жидкости, на выходе которой установлено распыливающее устройство, исполнительный механизм, подключенный через усилитель мощности к блоку сравнения, связанному с датчиком расхода жидкости и датчиком перемещения агрегата, и задатчик нормы расхода, отличающийся тем, что, с целью упрощения...
Розтискний пристрій з автоматичним регулюванням зазору гальмового механізму
Номер патенту: 28183
Опубліковано: 16.10.2000
Автори: Магерамов Лютфалі-Курбан Алієвич, Большаков Анатолій Костянтинович, Дуель Яков Ісаакович, Шепеленко Ігор Георгієвич
МПК: F16D 65/16
Мітки: гальмового, зазору, механізму, регулюванням, розтискний, пристрій, автоматичним
Формула / Реферат:
Разжимное устройство с автоматическим регулированием зазора тормозного механизма, включающее корпус, в котором расположены два толкателя, между которыми установлен клин с опорными роликами, выполненными с возможностью перемещения между толкателями и воздействия на прижим колодки, отличающееся тем, что каждый толкатель выполнен из двух частей и вместе с корпусом и прижимом колодки образуют гидравлическую полость, соединенную через устройство...
Попередній патент: Режекторний фільтр
Наступний патент: Компактна установка для одержання гарячекатаної сталевої штаби
Випадковий патент: Пюре-напівфабрикат з цукрового буряку