Велосипед з лінійним приводом “нім”

Формула / Реферат
Велосипед, що містить раму, на якій закріплено переднє і заднє колеса, сідло водія, кермо, вилку переднього колеса та привід, який включає перетворювач руху педалі, вал каретки, втулку, ведене зубчате колесо, ведучу зірочку, ланцюг, ведену зірочку, обгінну муфту та вал заднього колеса, перетворювач рухів педалі містить ведуче зубчате колесо, ліву та праву педалі, лівий та правий подовжені шатуни, корпус, в якому встановлені ведучий вал, дві втулки шатунів, дві обгінні муфти, два зубчаті конічні колеса та одне проміжне зубчате конічне колесо, вал якого встановлено перпендикулярно до ведучого вала, який відрізняється тим, що містить лінійний привід, який включає блок педаль - кареток, привідний круглий ремінь, обмотаний кілька разів кругом шківа, та зубчатий перетворювач прямолінійно-зворотних рухів педаль - кареток в обертові рухи вала, блок педаль - кареток включає ліву та праву напрямні, ліву та праву педаль - каретки, каркасні пластини, ліву та праву півосі напрямних, три пари коліщаток лівої педаль - каретки, три пари коліщаток правої педаль - каретки, дві амортизаційні пружини та каркасну розпору, зубчатий перетворювач прямолінійно - зворотних рухів педаль - кареток в обертові рухи вала включає шків, дві пари напрямних роликів привідного ременя, чотири валики та корпус, в якому встановлені вал шківа, два опорних підшипники, зубчате конічне колесо, ведучий вал, два опорних підшипника, два зубчатих конічних колеса та дві обгінні муфти.
Текст
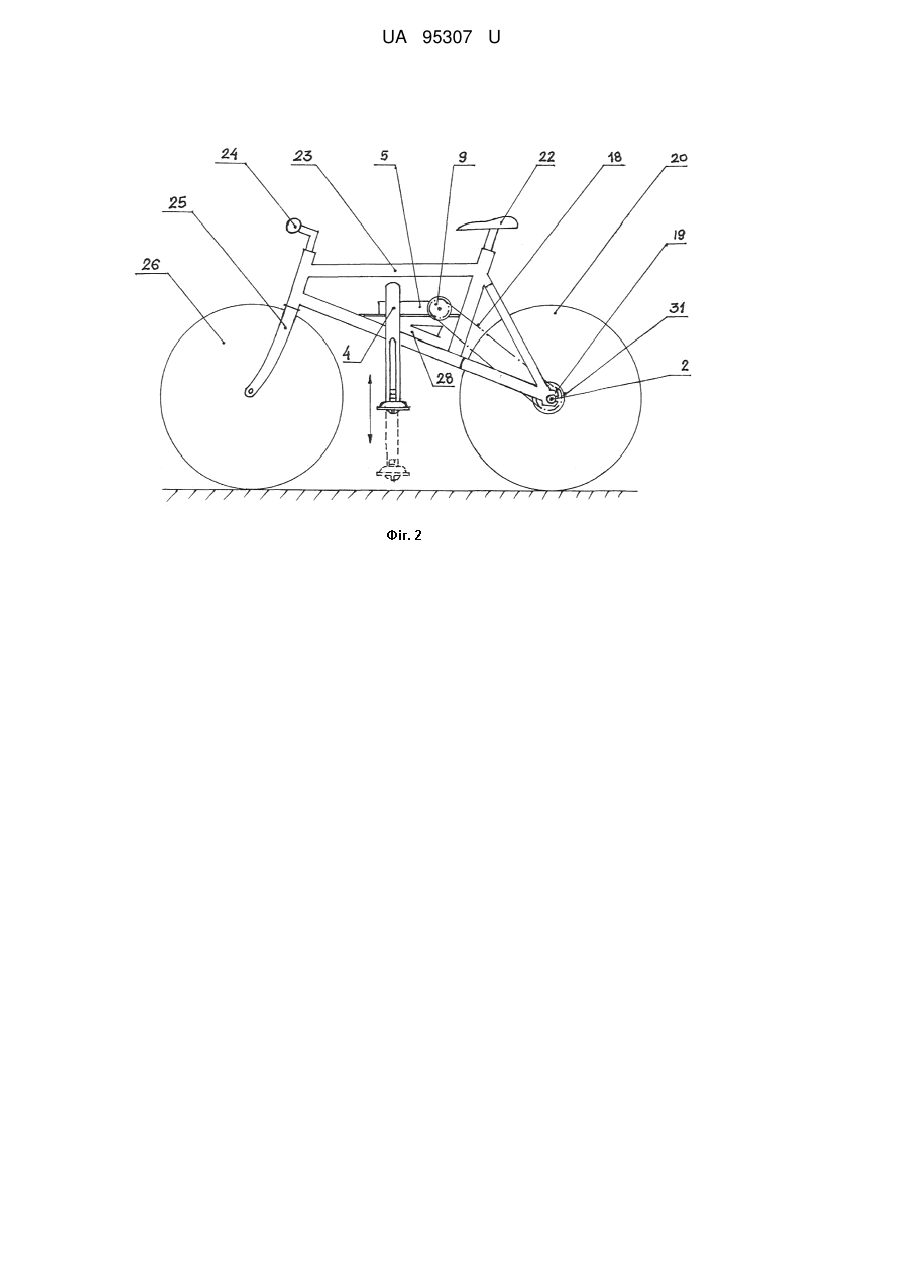
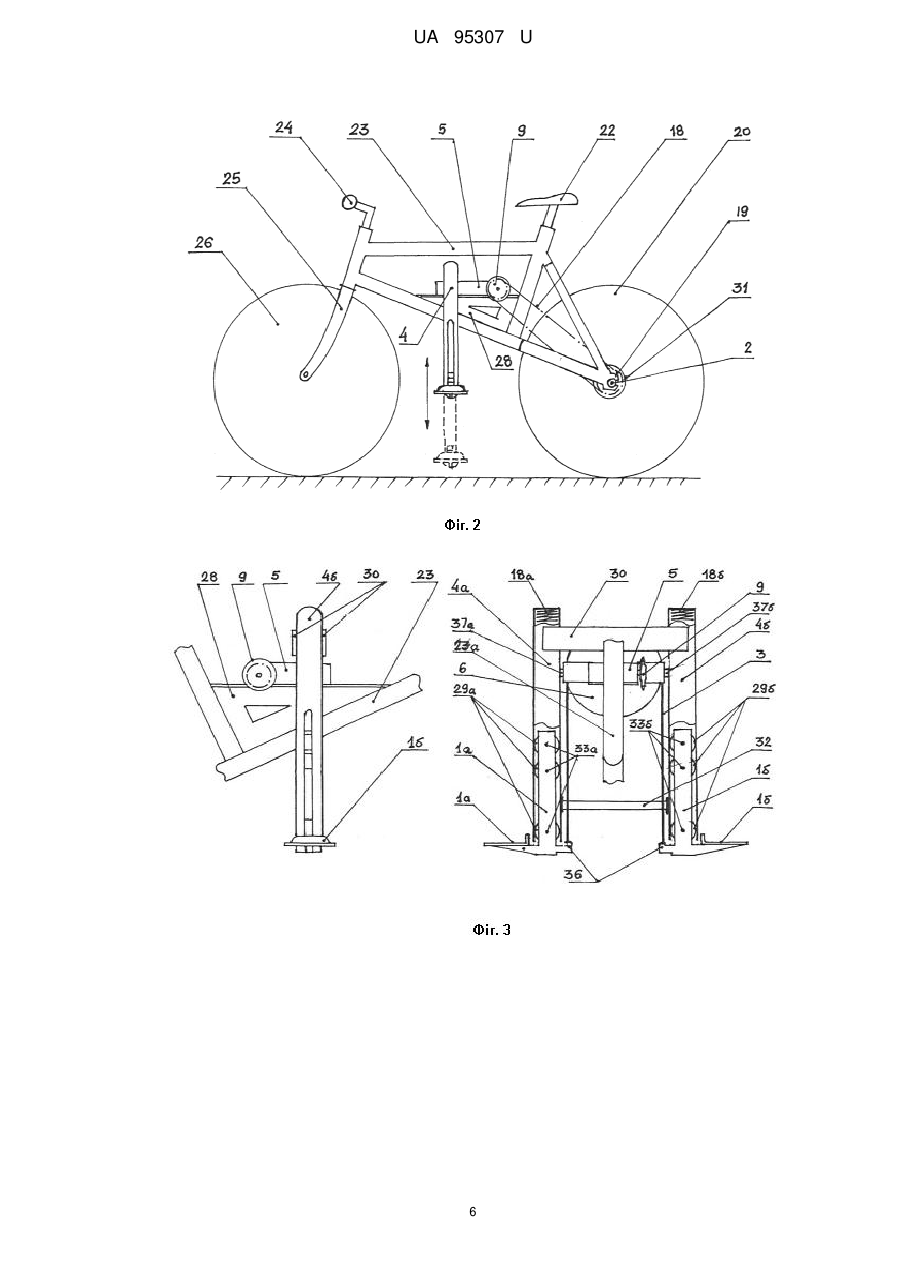
Реферат: UA 95307 U UA 95307 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до велосипедного машинобудування і може бути використана в транспортному машинобудуванні для виробництва велосипедів і інших транспортних засобів з м'язовим приводом. Відомо використання м'язових приводів на всіх велосипедах для їх переміщення по твердій поверхні William Hudson, Myths and Milestones in Bicycle Evolution, сайт Інтернету http://www.jimlangley.net/ride/bicyclehistorywh.html#tline0). Основним недоліком таких м'язових приводів є низька ефективність перетворення роботи ніг велосипедиста в крутний момент велосипеда і незручність в педалюванні, особливо під гору. Вказаний недолік викликаний тим, що використовуються м'язові приводи з круговим обертанням шатунів педалями, які є нелінійними, тому що нога велосипедиста і шатуни з педалями утворюють кривошипно-шатуновий механізм, у якого значення крутного моменту залежить від кута повороту шатунів і змінюється від нуля до максимуму по нелінійному синусоїдальному закону. Такий велосипед з нелінійним приводом має низьку ефективність перетворення роботи ніг велосипедиста в крутний момент велосипеда, яка теоретично складає (без урахування тертя) 64 % від максимальної сили ноги людини, прикладеної до педалі шатунів велосипеда. Найближчим аналогом корисної моделі є велосипед з коливальним рухом шатунів і педалі та ланцюговою передачею крутного моменту на заднє колесо, що включає в себе раму, на якій закріплено переднє і заднє колеса, сідло водія, кермо, вилку переднього колеса та нелінійний привід, який включає зубчатий перетворювач коливальних рухів педалі в обертові рухи вала, ведене зубчате колесо, вал каретки, втулку, ведучу зірочку ланцюгової передачі, ланцюг, ведену зірочку, обгінну муфту та вал заднього колеса, зубчатий перетворювач коливальних рухів педалі в кругові рухи включає ліву та праву педалі, лівий та правий подовжені шатуни, ведуче зубчате колесо та корпус, в якому встановлені ведучий вал, дві втулки шатунів, дві обгінні муфти, два зубчаті конічні колеса та одне проміжне конічне колесо, вал якого встановлено перпендикулярно до ведучого вала (Кропп А.Е. Як поліпшити велосипед? cайт інтернету http://www.vk-engineering.com/articles.php?pg=4&lng=ru від 08.10.2009 p.). Основним недоліком цього приводу також є, низька ефективність перетворення роботи ніг велосипедиста в крутний момент велосипеда, який теоретично складає 83 % від максимуму прикладеної сили ноги на педаль. У найближчому аналозі подовжили шатуни велосипеда в 1,5 рази, щоб збільшити довжину робочого шляху ноги велосипедиста, так як довжина хорди сектора звичайних шатунів при коливанні педалі в діапазоні 120 градусів, менше в 1,5 рази порівняно із довжиною хорди сектора звичайних шатунів в діапазоні 180 градусів. Подовження шатунів в 1,5 рази призведе до неефективної дії сил ніг велосипедиста на педалі при їх коливанні, тому що сила ноги буде прикладатися до педалі, а значить і до плеча подовженого шатуна, не під прямим кутом і тому крутний момент буде значно нижчий, очікуване підвищення ефективності до 83 % не відбулось. Довжина шатунів сучасних велосипедів встановлена з урахуванням ергономічних середньостатистичних параметрів довжини ніг сучасної людини і не може змінюватись, так як їх подовження призведе до порушення кінематичної схеми рухів ніг у нелінійному приводі і великим незручностям для велосипедиста. Крім цього коливання шатунів в діапазоні 120 градусів є частиною кругового руху, який, як показано вище, теж знижує ефективність м'язового приводу велосипеда аналога. Рухати ногами по колу з перемінною силою, або коливання педалями з довгими шатунами в секторі кола під кутом до горизонталі для людини не є комфортно, так як в процесі життя вона цього не робить. Людині природно рухати ногами прямолінійно-зворотно, як вона робить це при ходьбі чи піднімає своє тіло сходами в гору, переборюючи силу тяжіння землі. Задачею корисної моделі є підвищення ефективності перетворення роботи лінійнозворотних рухів ніг велосипедиста в крутний момент велосипеда, особливо при їзді в гору. Поставлена задача вирішується тим, що велосипед містить раму, на якій закріплено переднє і заднє колеса, сідло водія, кермо, вилку переднього колеса та привід, який включає перетворювач руху педалі, вал каретки, втулку, ведене зубчате колесо, ведучу зірочку, ланцюг, ведену зірочку, обгінну муфту та вал заднього колеса, перетворювач рухів педалі містить ведуче зубчате колесо, ліву та праву педалі, лівий та правий подовжені шатуни, корпус, в якому встановлені ведучий вал, дві втулки шатунів, дві обгінні муфти, два зубчаті конічні колеса та одне проміжне зубчате конічне колесо, вал якого встановлено перпендикулярно до ведучого вала, згідно з корисною моделлю, що включає лінійний привід, який включає, блок педаль кареток, привідний круглий ремінь, обмотаний кілька разів кругом шківа та зубчатий перетворювач прямолінійно-зворотних рухів педаль - кареток в обертові рухи вала, блок педаль - кареток включає ліву та праву напрямні, ліву та праву педаль - каретки, каркасні пластини, ліву та праву півосі напрямних, три пари коліщаток лівої педаль - каретки, три пари коліщаток правої педаль - каретки, двох амортизаційних пружин та каркасну розпору, зубчатий 1 UA 95307 U 5 10 15 20 25 30 35 40 45 50 55 60 перетворювач прямолінійно - зворотних рухів педаль - кареток в обертові рухи вала включає шків, дві пари напрямних роликів привідного ременя, чотири валики та корпус, в якому встановлені вал шківа, два опорних підшипники, зубчате конічне колесо, ведучий вал, два опорних підшипника, два зубчатих конічних колеса та дві обгінні муфти. Корисна модель пояснюється кресленнями (фіг. 1 - фіг. 6). Фіг. 1. Графіки крутного моменту на ведучих валах велосипеда аналога і того, що заявляється. Фіг. 2. Загальний вид велосипеда з м'язовим лінійним приводом "HIM", що заявляється. Фіг. 3. Конструкція м'язового лінійного приводу велосипеда "HIM", що заявляється, у зборі. Фіг. 4. Конструкція зубчатого перетворювача прямолінійно-зворотних рухів педаль - кареток в обертові рухи вала. Фіг. 5. Принципова кінематична схема велосипеда з лінійним приводом "HIM", що заявляється. Фіг. 6. Схема положення блока педаль - кареток лінійного приводу при їзді велосипеда вгору, вниз та горизонталі. Велосипед (Фіг. 2, Фіг. 3) з м'язовим лінійним приводом "HIM" включає раму 23, на якій встановлено переднє колесо 26, заднє колесо 20, сідло водія 22, кермо 24, вилка переднього колеса 25 та лінійний привід, який складається з блока педаль - кареток 4, привідного круглого ременя 3, зубчатого перетворювача 5 прямолінійно-зворотних рухів педаль - кареток в кругові рухи вала, ведучої зірочки 9, ланцюга 18, веденої зірочки 31 заднього колеса, обгінної муфти 19 заднього колеса та вала 2, заднього колеса. Блок педаль - кареток 4 (Фіг. 3) складається з лівої напрямної 4а, правої напрямної 46, лівої педалі - каретки 1а, правої педалі - каретки 1б, каркасних пластин 30, амортизаційних пружин 18а, 18б, півосі 31а лівої напрямної, півосі 31б правої напрямної, трьох пар педаль - кареткових коліщаток 29а лівої педаль - каретки, трьох пар педаль - кареткових коліщаток 29б правої педаль - каретки, каркасної розпори 32. Педаль - каретки 1а і 1б конструктивно об'єднані в одне ціле педалі для ніг та довгі карети для їх руху по напрямним 4а, 4б за допомогою трьох пар коліщаток 29а, 29б, встановлених на валиках 33 (Фіг. 3). Привідний круглий ремінь 3, обмотаний навколо шківа один раз, напрямляється з допомогою роликів 34 зверху вниз до педаль - кареток 1а, 1б, на яких його кінці закріплюються за допомогою затисків 36. Ліва та права напрямні 4а, 4б нерухомо з'єднані між собою в каркас двома паралельними пластинами 30, який через півосі 37а, 37б напрямних поворотно-з'єднаний з зубчатим перетворювачем 5 прямолінійно-зворотних рухів педаль кареток в обертові рухи вала. Зубчатий перетворювач 5 прямолінійно-зворотних рухів педаль - кареток в кругові рухи вала (Фіг. 4) складається з корпуса 17, в якому встановлено вал шківа 7, шків 6, два опорні підшипники 8, зубчате конічне колесо 10, ведучий вал 11, зубчате конічне колесо 12, обгінна муфта 13, зубчате конічне колесо 14, обгінна муфта 15, два опорних підшипники 16, напрямні ролики 34 привідного ременя та валики 35 роликів. Зубчатий перетворювач 5 прямолінійно-зворотних рухів педаль - кареток в кругові рухи вала (Фіг. 2) нерухомо кріпиться на рамі 23 велосипеда з допомогою кронштейна 28. Ефективність велосипеда з м'язовим лінійним приводом "HIM" з точки зору механіки. Допускаємо, що сила тиску ноги велосипедиста стала і прикладається до педалі вертикально. Сили тертя в деталях механізму при наших аналізах до уваги не беруться. Згідно з конструкцією велосипеда з м'язовим лінійним приводом "HIM", що заявляється, сила ноги велосипедиста прикладається до педалі весь час вертикально тому, що вісь ОО кріплення педалі на каретках (Фіг. 5, Фіг. 6) знаходиться весь час нижче осі ВВ кріплення півосі 37а, 37б напрямних 4 педаль - кареток на корпусі перетворювача 5 прямолінійно-зворотних рухів в кругові рухи вала. У зв'язку з цим педаль - каретки 1а, 1б рухаються тільки вниз і вверх по прямій вертикальній лінії, виконуючи роботу (робота дорівнює А=F*K*Sin 90, де F - сила тиску ноги, а K - довжина лінії руху педаль - каретки зверху вниз по прямій, кут прикладання сили ноги до педалі 90 градусів, Sin 90=1). Для того, щоб порівняння з аналогом були коректні довжина K повинна дорівнювати половині довжини кола педалі з радіусом рівним довжині подовженого в 1,5 рази шатуна звичайного велосипеда. Так як, кут прикладання сили ніг до педаль - кареток 1а, 1б за весь час руху ноги не змінний, то вся сила ноги без втрат передається через привідний круглий ремінь 3 на шків 6 під кутом 90 градусів (sin90=1), який обертає вал шківа 7 зубчатого перетворювача 5 прямолінійно-зворотних рухів педаль - кареток в кругові рухи вала, а той перетворює обертово-зворотні рухи шківа 6 в односторонні обертові рухи ведучого вала 11 і ведучої зірочки 9 велосипеда. Далі крутний момент від ведучої зірочки 9 через ланцюг 18 передається на ведену зірочку 31 заднього колеса. 2 UA 95307 U 5 10 15 20 25 30 35 40 45 50 55 Таким чином, конструкція лінійного приводу велосипеда "HIM", що заявляється, забезпечує перетворення роботи прямолінійно-зворотних рухів ніг велосипедиста в рух велосипеда лінійно і максимально ефективно, теоретично наближаючись до 100 %. Велосипед з лінійним приводом "HIM", що заявляється, працює таким чином (Фіг. 2, Фіг. 5). Сила Fл лівої ноги велосипедиста прикладається вертикально до лівої педаль - каретки 1а, яка по напрямній 4а тягне за собою вниз через напрямні ролики 34 лівий кінець привідного круглого ременя 3, який, будучи обмотаним кілька разів кругом шківа 6, повертає його вліво разом з його валом 7 шківа. Далі вал 7 шківа повертає зубчате конічне колесо 10 вліво, яке знаходиться в постійному зчепленні з зубчатими конічними колесами 12 і 14, і через заклинену обгінну муфту 13 повертає конічне колесо 12 та ведучий вал 11 вправо разом з ведучою зірочкою 9, на якому вона нерухомо закріплена (крутний момент на ведучий вал 11 передався). Одночасно з цим зубчате колесо 14, знаходячись в постійному зчепленні з зубчатим колесом 10, через розклинену обгінну муфту 15 робить вільний оберт вліво без повороту ведучого вала 11 (крутний момент на ведучий вал 11 не передався). Далі ведуча зірочка 9 через ланцюг 18 передає крутний момент від сили лівої ноги на ведену зірочку 31 і через заклинену обгінну муфту 19 на вал 2 заднього колеса 20 велосипеда. Велосипед під дією сили лівої ноги і її крутного моменту на вала 2 заднього колеса 20 їде вперед на довжину, рівну кількості обертів вала 2, помножену на довжину кола заднього колеса 20. Одночасно з цим, ліва педаль - каретка 1а, рухаючись вниз по напрямній 4а, через шків 6 затягує правий кінець привідного круглого ременя 3 разом з правою педаль - кареткою 1б вверх. Далі, права педаль-каретка 1б з верхнього положення під дією сили Fп правої ноги рухається вниз і тягне за собою через напрямні ролики 34 правий кінець привідного круглого ременя 3, який, будучи обмотаний кругом шківа 6 один раз, повертає його вправо разом з його валом шківа 7. Далі вал шківа 7 повертає зубчате конічне колесо 10 вправо, яке знаходиться в постійному зчепленні з зубчатими конічними колесами 14 і 12, і через заклинену обгінну муфту 15 повертає конічне колесо 14 та ведучий вал 11 вправо разом з ведучою зірочкою 9, на якому вона нерухомо закріплена (крутний момент на ведучий вал 11 передався). Одночасно з цим зубчате конічне колесо 12, находячись в постійному зчепленні з зубчатим конічним колесом 10, через розклинену обгінну муфту 13 робить вільний оберт вліво без повороту ведучого вала 11 (крутний момент на ведучий вал 11 не передався). Далі ведуча зірочка 9 через ланцюг 18 передає крутний момент від правої ноги на ведену зірочку 31 і через заклинену обгінну муфту 19 на вал 2 заднього колеса 20 велосипеда. Велосипед під дією сили правої ноги і її крутного моменту на валу 2 заднього колеса 20 їде вперед на довжину рівну кількості обертів вала 2 помножену на довжину кола заднього колеса 20. Одночасно з цим, права педаль - каретка 1б, рухаючись вниз по напрямній 4б, тягне через шків 6 лівий кінець привідного круглого ременя 3 разом з лівою педаль - кареткою 1а вверх. Під дією сил обох ніг велосипедиста, за допомогою вищеописаного м'язового лінійного привода однонаправлено обертаються ведучий вал 11 разом з ведучою зірочкою велосипеда 9, яка передає крутні моменти від ніг велосипедиста, через ланцюг велосипеда 18 на ведену зірочку 31, а через заклинену обгінну муфту 19 на вал 2 заднього колеса 20 велосипеда. Далі циклічно повторюються вертикальні прямолінійні - зворотні рухи правих і лівих ніг велосипедиста, які в свою чергу рухають прямолінійно - зворотно педаль-каретки 1а, 1б і далі ці рухи безперервно перетворюються зубчатим перетворювачем 5 в крутний момент, який рухає велосипед вперед. Із цього опису роботи велосипеда з лінійним приводом, що заявляється, видно, що сила ніг велосипедиста прикладається до педаль - кареток 1а, 1б і дальше, через привідний круглий ремінь 3, перпендикулярно до плеча шківа 6 і всіх зубчатих конічних коліс 10, 12, 14 і зірочок лінійного привода 9, 31, а це значить, що сила ніг велосипедиста передається без втрат на заднє колесо 20 велосипеда, якщо не враховувати сил тертя. В зубчатому перетворювачі 5 прямолінійно-зворотних рухів педаль - кареток в обертові рухи вала два зубчатих конічних колеса 12, 14 та обгінні муфти 13, 15 виконують роль суматора крутних моментів різнонаправлених обертів шківа 6, вала 7 і зубчатого конічного колеса 10 на однонаправлений крутний момент обертання ведучого вала 11 та ведучої зірочки 9, забезпечуючи таким чином рух велосипеда тільки вперед. На (Фіг. 1,б) показано графік крутного моменту ведучого вала 11 велосипеда з м'язовим лінійним приводом, що заявляється, з якого видно лінійність перетворення роботи прямолінійно-зворотних рухів ніг велосипедиста на різних амплітудах руху педаль - кареток 1а, 1б. 3 UA 95307 U 5 10 15 20 25 30 35 40 45 50 За допомогою кронштейна 28 велосипедист може закріплювати лінійний привід на рамі 23 велосипеда (Фіг. 2) що заявляється, так, щоб забезпечувався ефективний і оптимальний ергономічний прямолінійно-зворотній рух його ніг індивідуально до свого росту. Обертальне положення блока педаль - кареток 4 на півосях 37а, 37б по відношенню до зубчатого перетворювача 5 прямолінійно-зворотних рухів педаль кареток в обертовий рух вала дозволяє автоматично педалювати вертикально при їзді на підйом, вниз і горизонталі однаково ефективно з різною амплітудою (Фіг. 6). Кліренс велосипедної рами з новим лінійним приводом значно більший і дозволяє комфортніше почуватись велосипедисту на поворотах і нерівній пересічній місцевості. Крім цього на верхніх кінцях напрямних 4а, 4б лінійного приводу велосипеда, що заявляється, встановлено пружини 18а, 18б, які погашають кінетичну енергію ніг велосипедиста в верхній і нижній мертвих точках траєкторії руху ноги, що робить комфортне педалювання і зменшує навантаження на суглоби ніг велосипедиста при довготривалих перегонах. Таким чином, лінійний привід для велосипеда "HIM", що заявляється підвищує ефективність перетворення роботи прямолінійно-зворотних рухів ніг велосипедиста в крутний момент велосипеда, особливо на підйомі, а це значить, що він може рухатись швидше при меншій затраті сил, а також велосипедист буде комфортніше педалювати, як при поїздках в гору, так і на великих швидкостях. Судячи із графіка крутного моменту (Фіг. 1б), ефективність перетворення роботи ніг велосипедиста в крутний момент на велосипеді з лінійним приводом, що заявляється, буде теоретично приближуватись до 100 % (без урахування сил тертя) незалежно від значення прикладеної сили ноги на педаль. Велосипед з лінійним приводом "HIM" також дозволяє змінювати його швидкість не тільки за рахунок кількості прямолінійно-зворотних рухів ніг та переключення діаметрів ведучих і ведених зірочок, а і за рахунок зміни величини амплітуди цих рухів, що не можливо робити на сучасному велосипеді з фіксованою довжиною шатунів. Вищевказані можливості велосипеда з м'язовим лінійним приводом "HIM" дозволяють гнучко вибирати режими руху велосипеда по складній гірській і пересічній місцевості та зменшувати фізичні витрати велосипедиста. Виробництво велосипедів з таким ефективним лінійним приводом не потребує великих матеріальних і фінансових затрат для значного збільшення його можливостей, а мала металоємність та незначні витрати в сукупності дають значний техніко-економічний ефект від використання корисної моделі у виробництві велосипедів нового покоління і всіх транспортних засобів з м'язовим приводами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Велосипед, що містить раму, на якій закріплено переднє і заднє колеса, сідло водія, кермо, вилку переднього колеса та привід, який включає перетворювач руху педалі, вал каретки, втулку, ведене зубчате колесо, ведучу зірочку, ланцюг, ведену зірочку, обгінну муфту та вал заднього колеса, перетворювач рухів педалі містить ведуче зубчате колесо, ліву та праву педалі, лівий та правий подовжені шатуни, корпус, в якому встановлені ведучий вал, дві втулки шатунів, дві обгінні муфти, два зубчаті конічні колеса та одне проміжне зубчате конічне колесо, вал якого встановлено перпендикулярно до ведучого вала, який відрізняється тим, що містить лінійний привід, який включає блок педаль - кареток, привідний круглий ремінь, обмотаний кілька разів кругом шківа, та зубчатий перетворювач прямолінійно-зворотних рухів педаль - кареток в обертові рухи вала, блок педаль - кареток включає ліву та праву напрямні, ліву та праву педаль - каретки, каркасні пластини, ліву та праву півосі напрямних, три пари коліщаток лівої педаль - каретки, три пари коліщаток правої педаль - каретки, дві амортизаційні пружини та каркасну розпору, зубчатий перетворювач прямолінійно - зворотних рухів педаль - кареток в обертові рухи вала включає шків, дві пари напрямних роликів привідного ременя, чотири валики та корпус, в якому встановлені вал шківа, два опорних підшипники, зубчате конічне колесо, ведучий вал, два опорних підшипника, два зубчатих конічних колеса та дві обгінні муфти. 4 UA 95307 U 5 UA 95307 U 6 UA 95307 U 7 UA 95307 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: велосипед, ним, приводом, лінійним
Код посилання
<a href="https://ua.patents.su/10-95307-velosiped-z-linijjnim-privodom-nim.html" target="_blank" rel="follow" title="База патентів України">Велосипед з лінійним приводом “нім”</a>
Велосипед
Номер патенту: 895
Опубліковано: 16.07.2001
Автор: Беседовський Юрій Львович
МПК: B62K 3/00, B62J 17/00
Мітки: велосипед
Формула / Реферат:
Велосипед, що містить раму, на якій закріплені руль, переднє та заднє колеса, привідний механізм коліс, котрий складається із каретки з педалями і ведучою зірочкою, веденої зірочки й безперервного ланцюга, що зв'язує ведучу і ведену зірочки, сидіння зі спинкою, встановлене на рамі між переднім і заднім колесами, який відрізняється тим, що каретка з педалями і ведучою зірочкою встановлена над переднім колесом з можливістю зміни її положення...
Академічний велосипед

Номер патенту: 91049
Опубліковано: 25.06.2010
Автор: Синило Олександр Васильович
МПК: B62M 1/00
Мітки: велосипед, академічний
Формула / Реферат:
Велосипед, що містить переднє колесо в передній вилці, стрижень якої і руль з'єднані з можливістю обертання з рамою, в якій встановлено заднє колесо, сидіння, з'єднані з віссю каретки приводу кривошипи з педалями, який відрізняється тим, що в напрямну рами встановлено з можливістю переміщення вздовж неї повзун сидіння, кривошипи довжиною від 20 см до 50 см паралельні і спрямовані в один бік, педалі споряджені засобами кріплення ніг.
Велосипед

Номер патенту: 64142
Опубліковано: 25.10.2011
Автори: Панасенко Олександр Миколайович, Панасенко Микола Іванович
МПК: B62K 3/00
Мітки: велосипед
Формула / Реферат:
1. Велосипед, що містить раму, переднє кероване колесо, яке встановлене у вилці, заднє ведуче колесо, що встановлене на рамі, шатуни з педалями, сідло, гальмо, який відрізняється тим, що педальний привід велосипеда встановлений на валу заднього колеса та складається з жорстко закріплених з обох боків вала заднього колеса шатунів з педалями, між якими жорстко закріплені на валу центральна втулка, з встановленими в ній підшипниками, та...
Велосипед з мускульним переднім приводом
Номер патенту: 43136
Опубліковано: 15.11.2001
Автор: Вакуленко Валентин Олександрович
МПК: B62M 1/00
Мітки: приводом, мускульним, переднім, велосипед
Формула / Реферат:
1. Велосипед з мускульним переднім приводом, який складається із рами з сидінням, руля, двох вилок з колесами та обгінними муфтами на одному з них та приводу з педалями, який відрізняється тим, що кожна з вилок виконана з труби у вигляді літери П і рамки, причому одна з вилок жорстко з'єднана рамою, а друга є рульовою, привід складається з двох секторів, які за допомогою знімної осі встановлені на будь-якій вилці та кінематично зв'язані із...
Привід велосипеда
Номер патенту: 52502
Опубліковано: 25.08.2010
Автор: Подлісецький Олександр Семенович
МПК: B62M 1/00
Мітки: привід, велосипеда
Формула / Реферат:
Привід велосипеда, що містить педалі, з'єднані з ведучим зубчатим колесом, ведене зубчате колесо, що перебуває на одній осі з обгінною муфтою й заднім колесом, який відрізняється тим, що педалі закріплені до рейок, що мають косі зуби, рейки встановлені із двох сторін від зубчатого колеса й перебувають із ним у зачепленні, причому зубчате колесо жорстко з'єднане з первинним валом, який має можливість вільно обертатися і переміщатися вздовж...
Попередній патент: Механізм зміни довжини педальних важелів велосипеда
Наступний патент: Спосіб бігепатикоєюностомії
Випадковий патент: Спосіб визначення експлуатаційних властивостей рідини