Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірювань прискорення вільного падіння
Номер патенту: 96904
Опубліковано: 12.12.2011
Автори: Вінніченко Олександр Іванович, Болюх Володимир Федорович
Формула / Реферат
1. Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірів прискорення вільного падіння, який містить пробне тіло з оптичним кутовим відбивачем, вакуумну камеру, штовхач пробного тіла, напрямні елементи, електромеханічний привод, який складається з коаксіально розташованих якоря і котушки з обмоткою, який відрізняється тим, що використаний електромеханічний привод індукційно-динамічного типу, який виконаний у вигляді обмотки дискової форми, яка підключена до ємнісного накопичувача енергії і розташована в котушці з ізоляційного матеріалу, якір виконаний у вигляді диска з електропровідного матеріалу, нижня сторона якого повернена до верхньої сторони обмотки котушки, а його верхня сторона з'єднана з силовим штовхаючим диском так, що упорядковано розташовані в тангенціальному напрямку на одному радіусі силового диска принаймні три отвори з підшипниками охоплюють напрямні елементи, виконані у вигляді вертикальних стійок круглого перерізу, при цьому обмотка з'єднана з ємнісним накопичувачем енергії за допомогою двох зустрічно-паралельно з'єднаних керованих тиристорів, один з яких забезпечує початкове відштовхування, а інший - наступне гальмування якоря відносно обмотки котушки.
2. Балістичний гравіметр за п. 1, який відрізняється тим, що масивна силова плита, на якій зафіксовані котушка і радіально охоплюючі її вертикальні стійки, встановлена на демпферах на днище вакуумної камери.
3. Балістичний гравіметр за п. 1, який відрізняється тим, що до днища пробного тіла аксіально приєднаний напрямний конус, форма бокових стінок якого збігається з формою напрямної конусоподібної аксіальної виїмки котушки, а в якорі і силовому диску виконані центральні отвори для напрямного конуса.
4. Балістичний гравіметр за п. 1, який відрізняється тим, що вертикальні стойки, які забезпечують вільне вертикальне переміщення якоря з силовим диском, в нижній частині виконані зі збільшеним діаметром для підшипників силового диска, в верхній частині виконані зі зменшеним діаметром, причому зазначені частини вертикальних стійок плавно з'єднані конусоподібними ділянками.
5. Балістичний гравіметр за п. 4, який відрізняється тим, що котушка розташована ззовні вакуумної камери, на кінцях вертикальних стійок встановлені пружні демпфери і силовий диск з'єднаний з пробним тілом.
6. Балістичний гравіметр за п. 1, який відрізняється тим, що вертикальні стійки, які забезпечують фіксоване вертикальне переміщення якоря з силовим диском і вільне вертикальне переміщення пробного тіла, в верхній частині з'єднані з встановленими на масивній силовій плиті горизонтальними упорами, до яких приєднані пружні демпфери, так що встановлені на вертикальних ділянках горизонтальних упорів пружні елементи забезпечують утримання якоря з силовим диском за відсутності взаємодії пробного тіла з силовим диском.
7. Балістичний гравіметр за п. 1, який відрізняється тим, що при забезпеченні фіксованого вертикального переміщення якоря з силовим диском і вільного вертикального переміщення пробного тіла на охоплюючих вертикальні стійки підшипниках встановлені коаксіальні зачепи, верхня розширена частина яких взаємодіє з пружними елементами захватів, з'єднаних з горизонтальними упорами, забезпечуючи утримання якоря з силовим диском за відсутності взаємодії пробного тіла з силовим диском.
8. Балістичний гравіметр за п. 1 який відрізняється тим, що зовнішній і внутрішній діаметри якоря і обмотки котушки виконані однаковими.
9. Балістичний гравіметр за п. 1, який відрізняється тим, що якір виконаний з міді.
10. Балістичний гравіметр за п. 1, який відрізняється тим, що обмотка котушки замонолічена епоксидним компаундом.
Текст
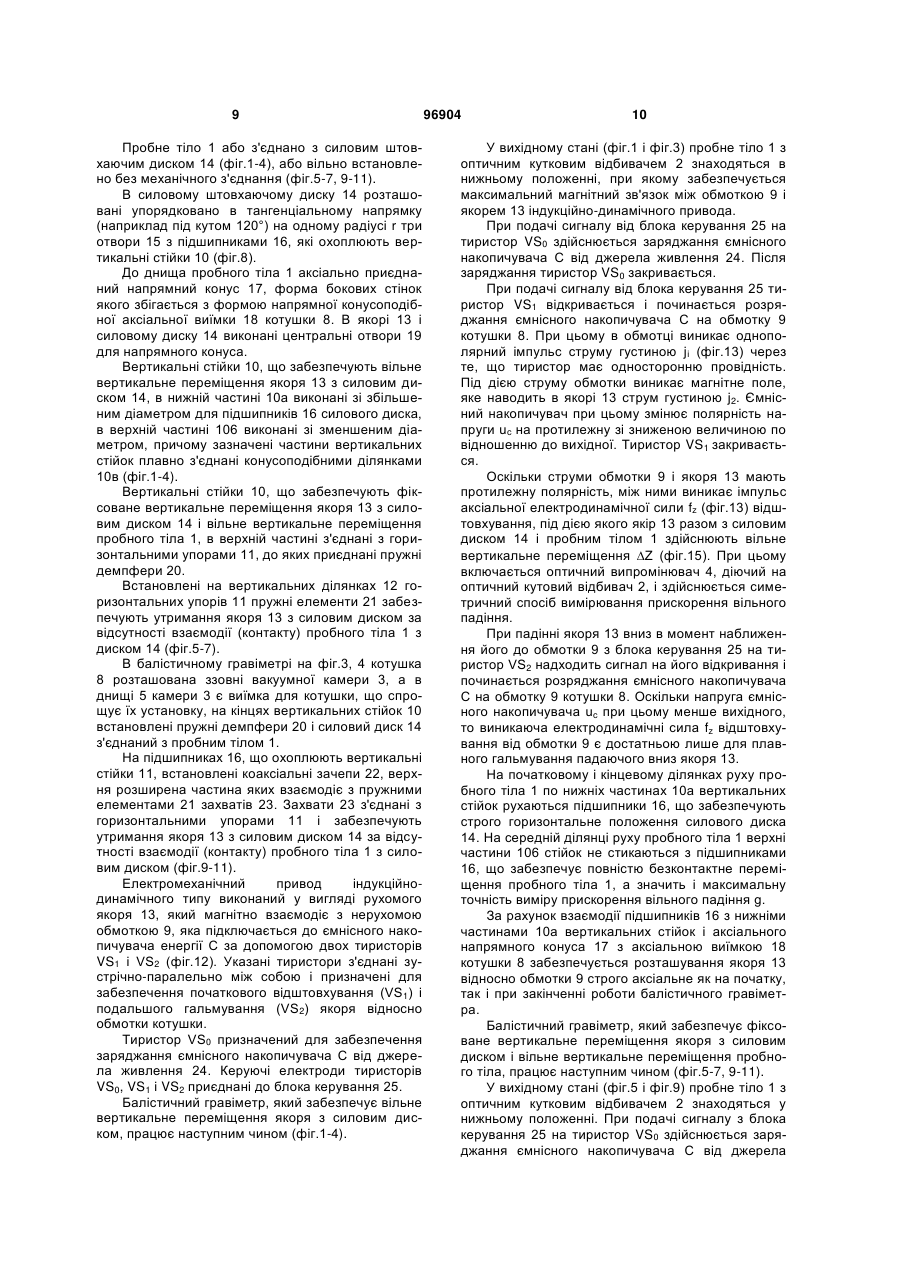
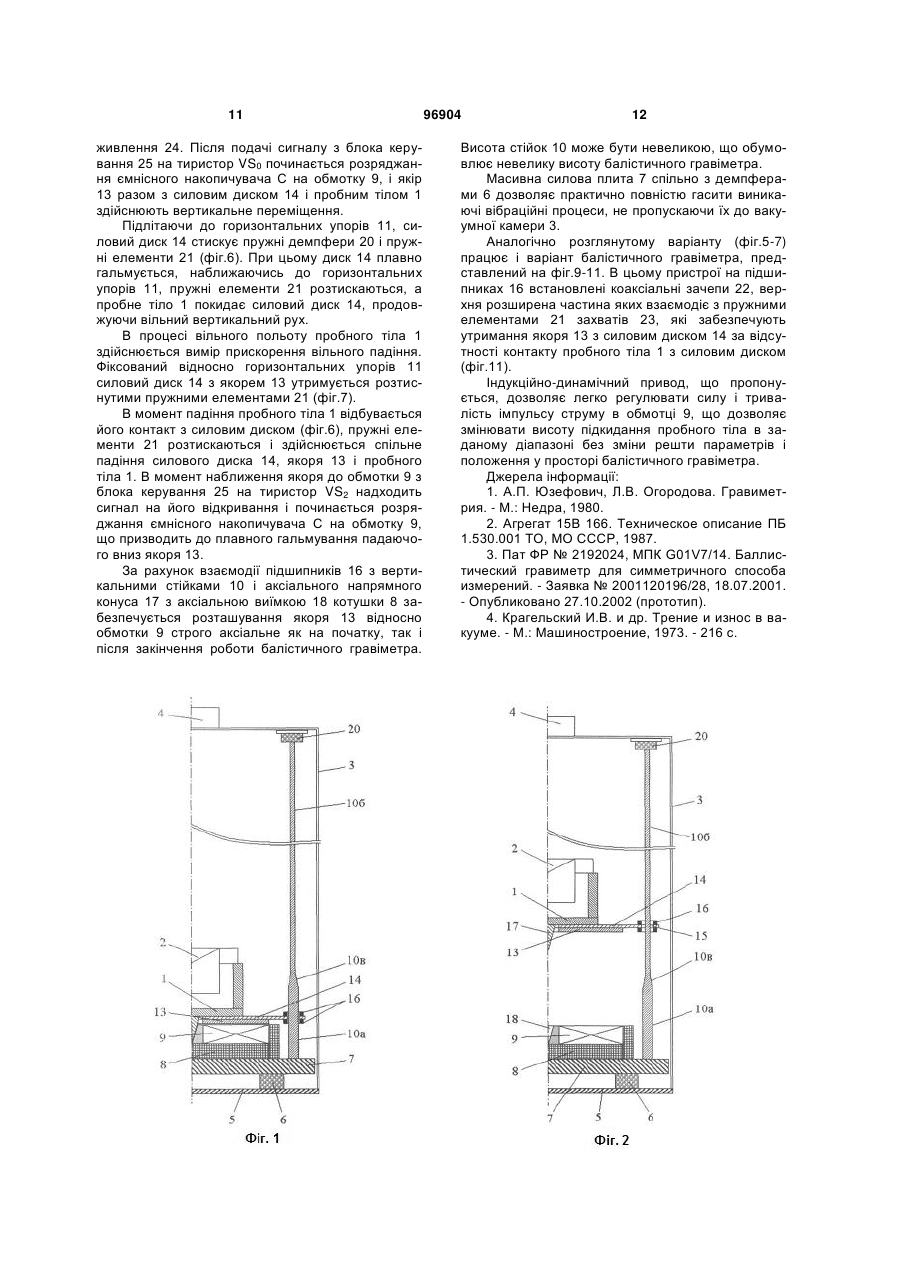
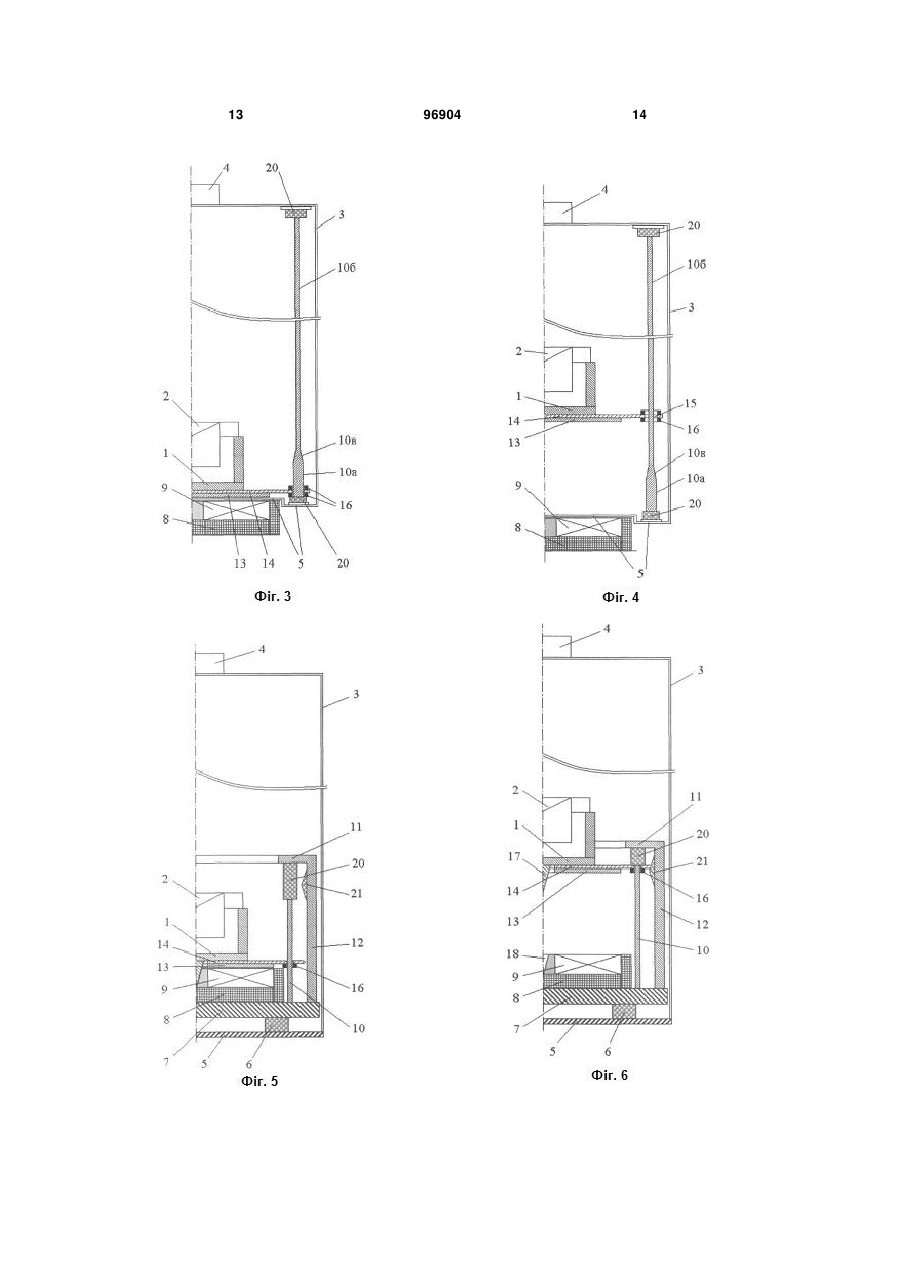
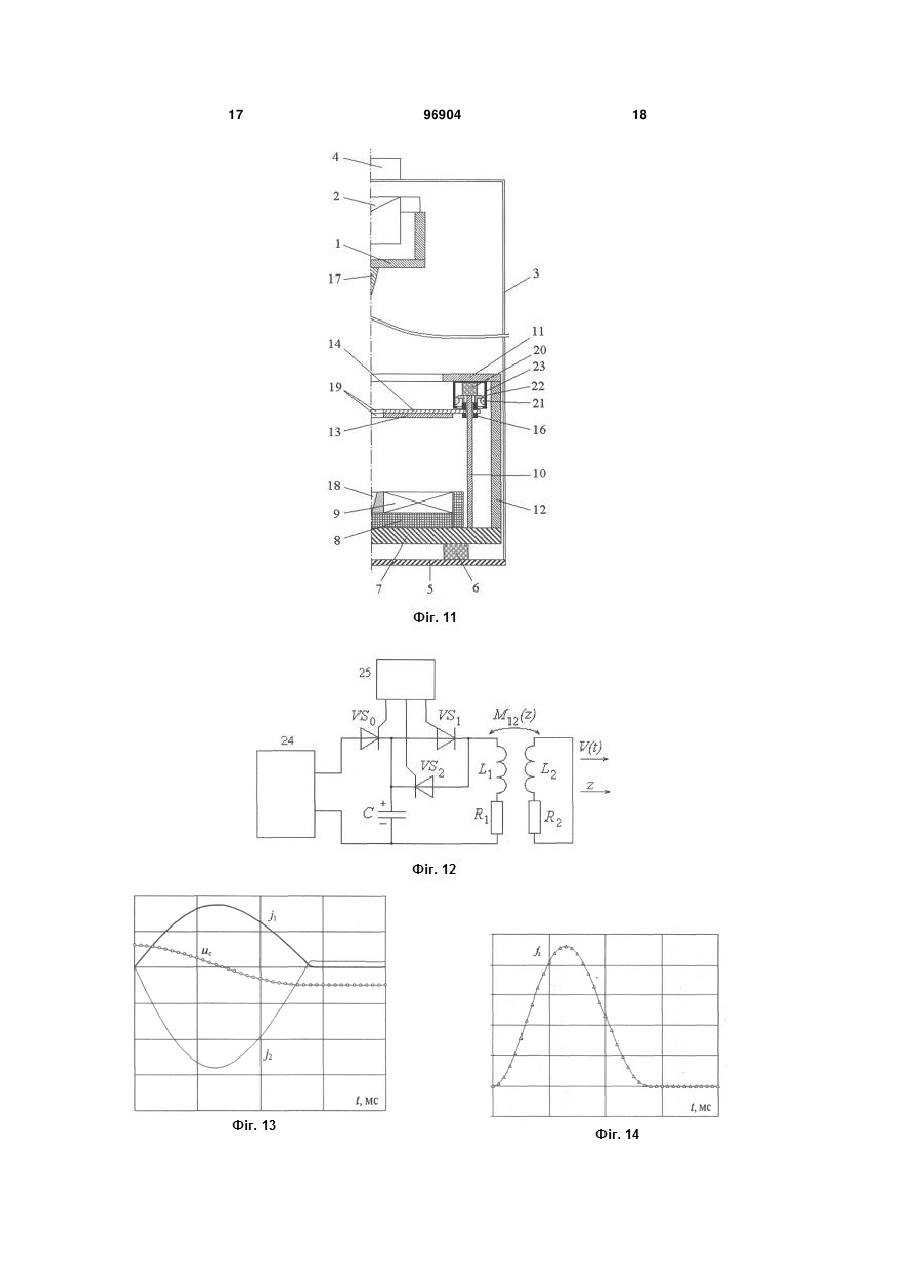
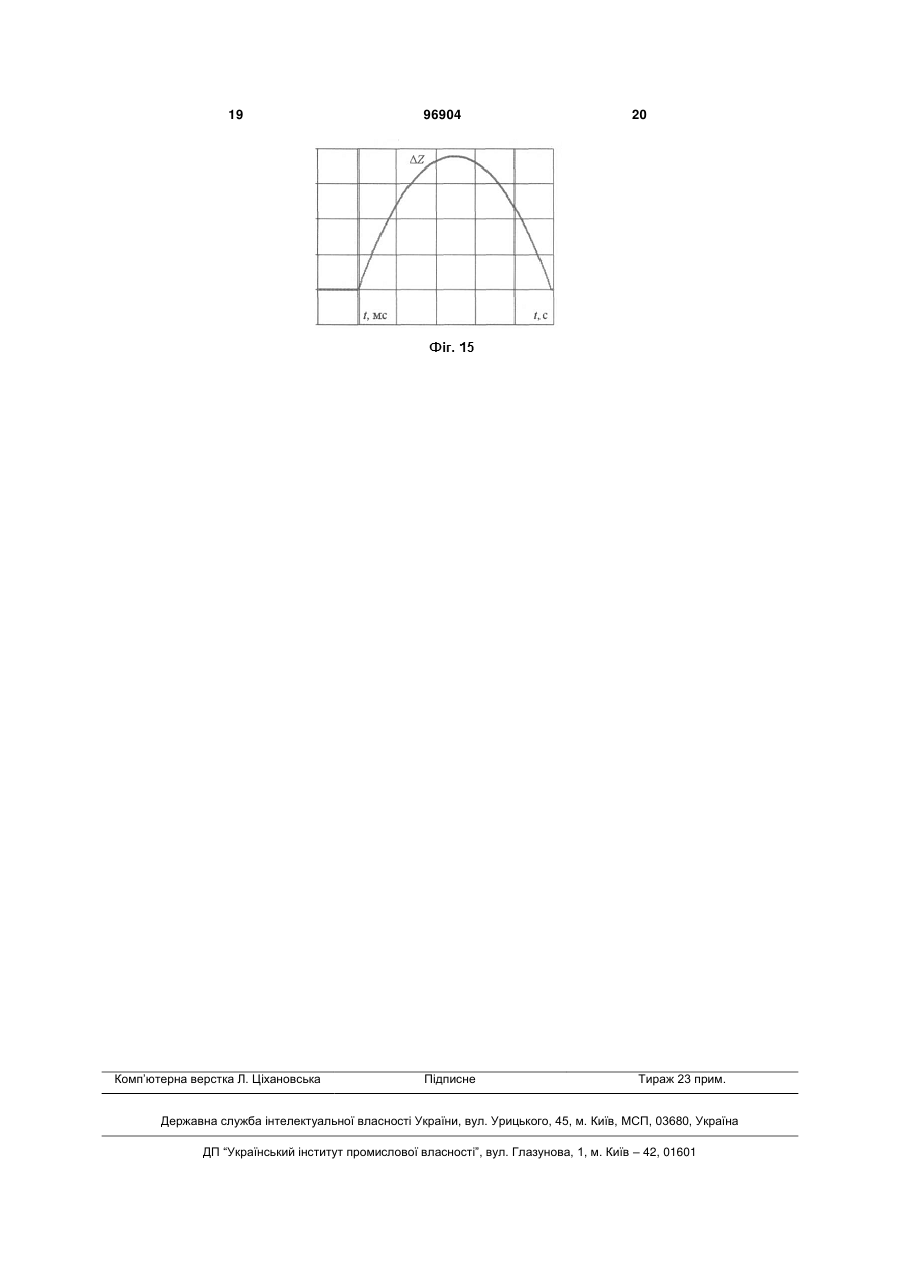
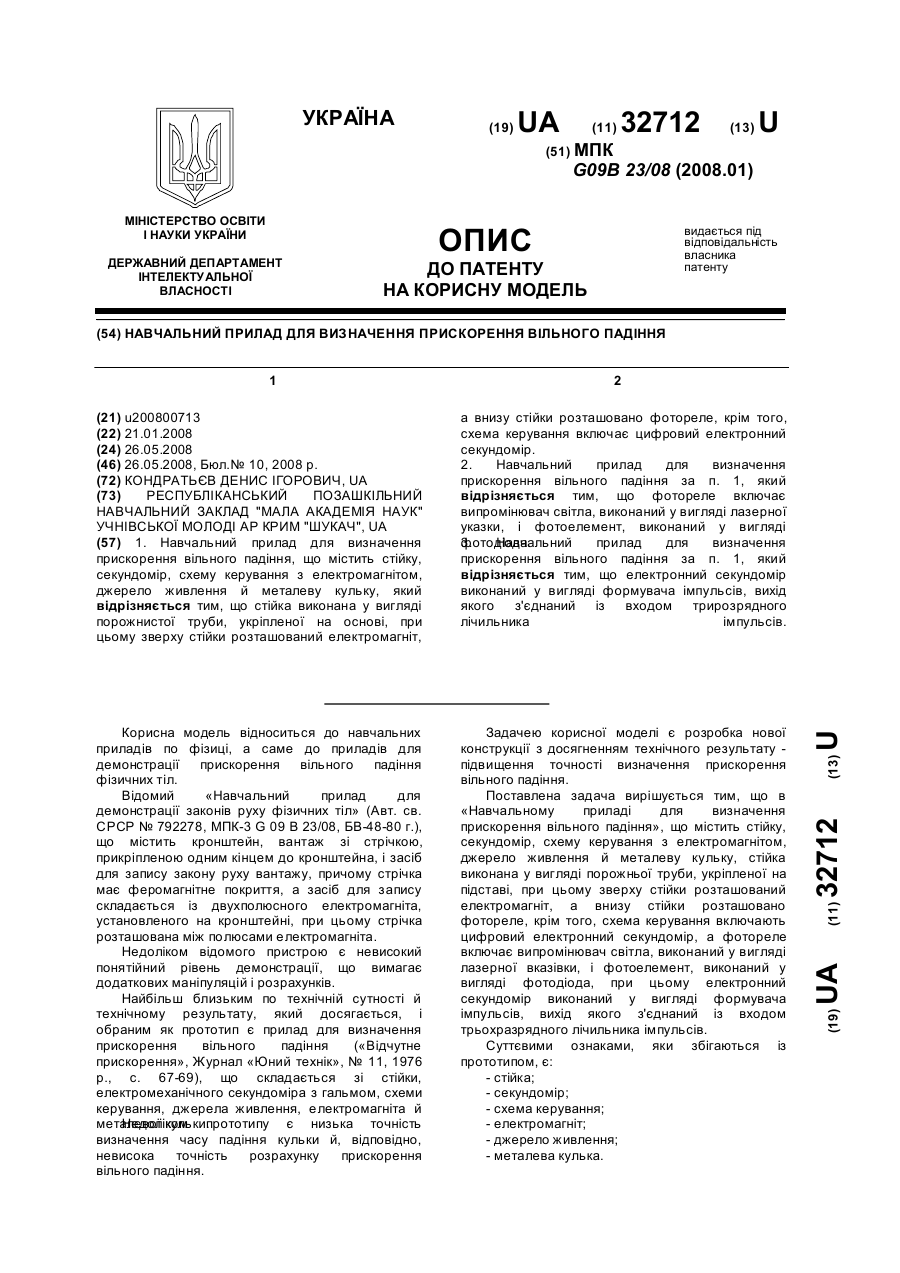
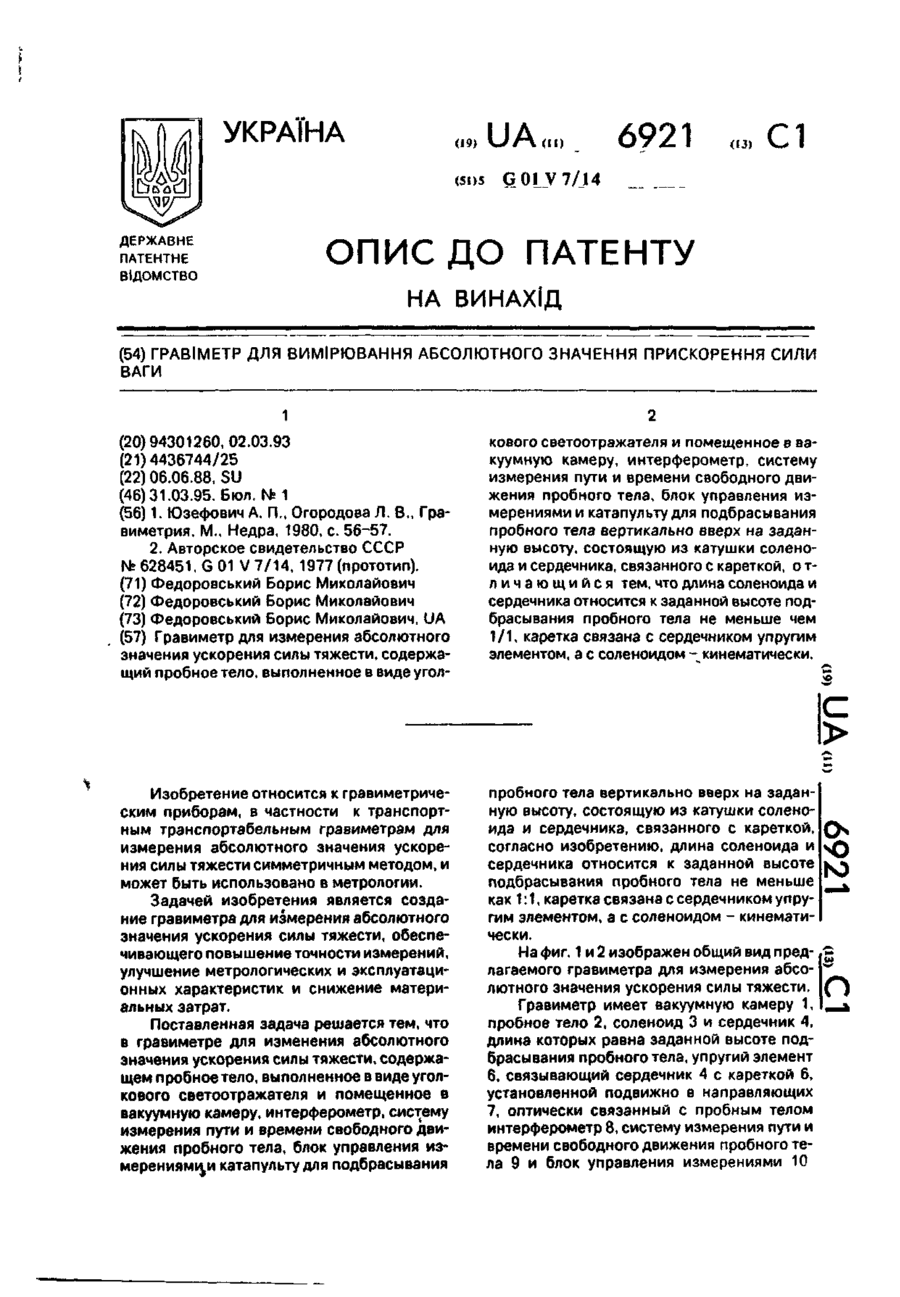
1. Балістичний гравіметр з індукційнодинамічним приводом для симетричного способу вимірів прискорення вільного падіння, який містить пробне тіло з оптичним кутовим відбивачем, вакуумну камеру, штовхач пробного тіла, напрямні елементи, електромеханічний привод, який складається з коаксіально розташованих якоря і котушки з обмоткою, який відрізняється тим, що використаний електромеханічний привод індукційнодинамічного типу, який виконаний у вигляді обмотки дискової форми, яка підключена до ємнісного накопичувача енергії і розташована в котушці з ізоляційного матеріалу, якір виконаний у вигляді диска з електропровідного матеріалу, нижня сторона якого повернена до верхньої сторони обмотки котушки, а його верхня сторона з'єднана з силовим штовхаючим диском так, що упорядковано розташовані в тангенціальному напрямку на одному радіусі силового диска принаймні три отвори з підшипниками охоплюють напрямні елементи, виконані у вигляді вертикальних стійок круглого перерізу, при цьому обмотка з'єднана з ємнісним накопичувачем енергії за допомогою двох зустрічно-паралельно з'єднаних керованих тиристорів, один з яких забезпечує початкове відштовхування, а інший - наступне гальмування якоря відносно обмотки котушки. 2. Балістичний гравіметр за п. 1, який відрізняється тим, що масивна силова плита, на якій зафіксовані котушка і радіально охоплюючі її вертикальні стійки, встановлена на демпферах на днище вакуумної камери. 2 (19) 1 3 96904 4 9. Балістичний гравіметр за п. 1, який відрізняється тим, що якір виконаний з міді. 10. Балістичний гравіметр за п. 1, який відрізняється тим, що обмотка котушки замонолічена епоксидним компаундом. Винахід належить до галузі гравіметрії і може бути використаний в балістичних гравіметрах для симетричного способу вимірювань абсолютних значень прискорення вільного падіння g. Існують гравіметри для визначення абсолютного значення прискорення вільного падіння g шляхом вимірювання параметрів вільного польоту вертикально підкинутої догори пробної маси (пробного тіла) [1]. Основними елементами такого гравіметра є: вакуумна камера з розміщеної в ній катапультою для підкидання пробного тіла у вигляді куткового оптичного відбивача, лазерний інтерферометр переміщень, електронно-рахункова система для обробки інтерференційного сигналу з виходу інтерферометра з метою обчислення g і керування роботою катапульти. Відомий балістичний гравіметр, в якому катапульта для підкидання пробного тіла виконана у вигляді якоря соленоїда і напрямних елементів для вертикального руху якоря [2]. Недоліком відомої катапульти з соленоїдним електромагнітним приводом є те, що при кидку пробного тіла наявна віддача, яка через механічний зв'язок діє на рахункову систему - лазерний інтерферометр, збуджуючи в ньому вертикальні коливання і вносячи похибку у результат виміру g. Найбільш близьким за своєю технічною суттю до винаходу, що пропонується, є балістичний гравіметр для симетричного способу вимірювань прискорення вільного падіння g, який містить пробне тіло з оптичним відбивачем, вакуумну камеру, каретку штовхача з напрямними елементами, соленоїдний електромагнітний привод, що складається з якоря і котушки (обмотки), причому каретка штовхача зв'язана з якорем соленоїда рівноплечим пантографом, забезпечуючи при цьому зменшення віддачі катапульти при підкиданні пробного тіла [3]. В даному гравіметрі за рахунок зменшення віддачі катапульти при підкиданні пробного тіла забезпечується підвищення точності виміру прискорення вільного падіння g. Недоліком відомого технічного рішення є багатоступенева передача енергії від електричного джерела, що живить обмотку котушки, на вертикальне переміщення каретки з пробним тілом. Забезпечення зазначеного перетворення енергії здійснюється через переміщення якоря вниз, осьове розтискання і радіальне стискання пантографа відносно нерухомої осі, механічна взаємодія підшипників каретки і якоря з напрямними елементами. При осьовому розтисканні пантографа відбувається механічна взаємодія значної кількості шарнірних елементів як між собою, так і з нерухомою віссю, яка з'єднана з вакуумною камерою. За рахунок значної осьової висоти пантографа в балістичному гравіметрі збільшуються габарити неробочої зони вакуумної камери. Створення зазначеного штовхача обумовлює жорсткі вимоги до розмірів, маси і контактних поверхонь його механічних елементів для недопущення виникнення радіальних сил, що спричиняють відхилення пробного тіла від вертикальної осі. Оскільки зазначений електро-, магнітно-, механічний штовхач механічно пов'язаний з іншими нерухомими елементами, наприклад зі стінками вакуумної камери, то під час роботи балістичний гравіметр зазнає дії різних механічних коливань, спричинених ударно-вібраційними процесами. Ці вібрації являють собою нестаціонарний випадковий процес і ведуть до появи детермінованої основи у похибці виміру, яка може змінюватись. Такі систематичні складові похибки не можуть бути зменшені проведенням повторних вимірів, і подальше підвищення динамічної точності може бути досягнуте за рахунок зменшення (в ідеалі до нуля) кількості механічних взаємодій рухомих з нерухомими елементами. У відомому балістичному гравіметрі через механічну взаємодію рухомих з нерухомими елементами при роботі у вакуумі необоротно змінюються контактні поверхні: виникають мікроскопічні тріщини, руйнуються поверхневі, наприклад, окисні плівки, збільшується коефіцієнт тертя, а знос елементів може досягнути неприпустимих величин, які виключають нормальне функціонування гравіметра [4]. Взаємодія феромагнітного якоря з обмоткою котушки електромагнітного привода не дозволяє через нелінійну криву намагнічування і насичення феромагнітного матеріалу регулювати швидкість каретки штовхача в необхідних межах із забезпеченням заданої величини. Задачею винаходу є підвищення точності балістичного гравіметра за рахунок прямого перетворення електричної енергії в кінетичну, зменшення габаритів і підвищення регулювальних характеристик привода. Поставлена задача вирішується за рахунок того, що у відомому балістичному гравіметрі для симетричного способу вимірів прискорення вільного падіння, який містить пробне тіло з оптичним кутковим відбивачем, вакуумну камеру, штовхач пробного тіла, напрямні елементи, електромеханічний привод, що складається з коаксіально розташованих якоря і котушки з обмоткою, у відповідності з винаходом, що пропонується, електромеханічний привод індукційно-динамічного типу виконаний у вигляді обмотки дискової форми, яка підключається до ємнісного накопичувача енергії і розташована в котушці з ізоляційного матеріалу, якір виконаний у вигляді диска з електропро 5 відного матеріалу, нижня сторона якого звернена до верхньої сторони обмотки котушки, а верхня сторона з'єднана з силовим диском, що штовхає, так, що упорядковано розташовані в тангенціальному напрямку на одному радіусі силового диска, принаймні, три отвори з підшипниками охоплюють напрямні елементи, виконані у вигляді вертикальних стійок круглого перерізу, при цьому обмотка з'єднана з ємнісним накопичувачем енергії за допомогою двох зустрічно-паралельно з'єднаних керованих тиристорів, один з яких забезпечує початкове відштовхування, а інший - наступне гальмування якоря відносно обмотки котушки. Крім того, масивна силова плита, на якій зафіксовані котушка і вертикальні стійки, що радіально її охоплюють, встановлена на демпферах на днище вакуумної камери. Крім того, до днища пробного тіла аксіально приєднаний напрямний конус, форма бокових стінок якого збігається з формою напрямної конусоподібної аксіальної виїмки котушки, а в якорі і силовому диску виконані центральні отвори для напрямного конуса. Крім того, вертикальні стійки, що забезпечують вільне вертикальне переміщення якоря з силовим диском, в нижній частині виконані зі збільшеним діаметром для підшипників силового диска, в верхній частині виконані зі зменшеним діаметром, причому зазначені частини вертикальних стійок плавно з'єднані конусоподібними ділянками. Крім того, котушка розташована ззовні вакуумної камери, на кінцях вертикальних стійок встановлені пружні демпфери і силовий диск з'єднаний з пробним тілом. Крім того, вертикальні стійки, що забезпечують фіксоване вертикальне переміщення якоря з силовим диском і вільне вертикальне переміщення пробного тіла, в верхній частині з'єднані з встановленими на масивній силовій плиті горизонтальними упорами, до яких приєднані пружні демпфери, так що встановлені на вертикальних ділянках горизонтальних упорів пружні елементи забезпечують утримання якоря з силовим диском за відсутності взаємодії пробного тіла з силовим диском. Крім того, при забезпеченні фіксованого вертикального переміщення якоря з силовим диском і вільного вертикального переміщення пробного тіла на підшипниках, що охоплюють вертикальні стійки встановлені коаксіальні зачепи, верхня розширена частина яких взаємодіє з пружними елементами захватів, з'єднаних з горизонтальними упорами, забезпечуючи утримання якоря з силовим диском за відсутності взаємодії пробного тіла з силовим диском. Крім того, зовнішній і внутрішній діаметри якоря і обмотки котушки виконані однаковими. Крім того, якір виконаний з міді. Крім того, обмотка котушки замонолічена епоксидним компаундом. У балістичному гравіметрі, що пропонується, здійснюється безпосередня передача енергії від електричного джерела, що живить обмотку котушки, на вертикальне переміщення пробного тіла. При такому електромеханічному перетворенні енергії за допомогою магнітного поля не відбува 96904 6 ється механічної взаємодії різних механічних елементів між собою і з вакуумною камерою. Оскільки товщина (висота) і якоря і силового диска малі, то суттєво зменшується висота гравіметра за рахунок усунення неробочої зони вакуумної камери. Виготовлення круглого якоря і силового диска може бути виконано легко на токарному верстаті, не потребуючи складних технологічних операцій. Обмотка котушки і якір працюють в лінійному середовищі в магнітному відношенні, що дозволяє легко регулювати імпульс збудження струму в обмотці для зміни висоти підкидання пробного тіла. Обмотка дискової форми, магнітно взаємодіюча з електропровідним дисковим якорем, утворює індукційно-динамічний привод, який забезпечує безконтактне перетворення електричної енергії ємнісного накопичувача в кінетичну енергію вертикального переміщення пробного тіла. Однаковий зовнішній і внутрішній діаметри якоря і обмотки котушки сприяє підвищеній ефективності зазначеного привода. Цій меті підпорядковане і виготовлення якоря з міді - відносно дешевого і високоелектропровідного матеріалу. Ємнісний накопичувач може тривалий час заряджатися від зовнішнього джерела малим струмом, наприклад від автономного акумулятора, і розряджатися на обмотку котушки за короткий час великим струмом, що важливо для створення механічного імпульсу відштовхування якоря. Оскільки обмотка з'єднана з ємнісним накопичувачем енергії за допомогою двох зустрічнопаралельно з'єднаних тиристорів, то при подачі напруги на керуючий електрод першого тиристора забезпечується початкове відштовхування якоря від обмотки котушки, а при подачі через певний час напруги на керуючий електрод другого тиристора забезпечується електродинамічне гальмування якоря, що виключає його різкий удар об обмотку котушки. Замонолічування обмотки котушки (заливка з подальшим затвердінням) епоксидним компаундом робить таку конструкцію міцною, цілісною і надійною. Близьке розташування якоря з верхньою стороною обмотки забезпечує максимальний магнітний зв'язок між ними. Силовий штовхаючий диск служить для передачі кінетичної енергії пробному тілу і перешкоджає деформації (вигинанню) мідного якоря. Виконання напрямних елементів у вигляді вертикальних стійок круглого перерізу дозволяє забезпечувати строго горизонтальне положення при переміщенні силового диска з якорем в вертикальному напрямку. Це досягається за рахунок наявності упорядковано розташованих в тангенціальному напрямку на одному радіусі, принаймні, трьох отворів з підшипниками, що охоплюють зазначені вертикальні стійки. Установка масивної силової плити, на якій зафіксовані котушка і вертикальні стійки, що радіально її охоплюють, на демпферах на днище вакуумної камери, дозволяє суттєво зменшити передачу силового імпульсу вакуумній камері і її 7 вібраційні процеси, що важливо для вимірювальної системи гравіметра. Приєднання до днища пробного тіла вздовж його осі напрямного конуса і виконання напрямної конусоподібної осьової виїмки в котушці з формами, що збігаються, бокових стінок дозволяє легко центрувати пробне тіло у вихідному і кінцевому (після підкидання) стані відносно обмотки котушки, забезпечуючи строго вертикальне переміщення пробного тіла. При забезпеченні вільного вертикального переміщення якоря з силовим диском і пробним тілом вертикальні стійки в нижній частині виконані зі збільшеним діаметром для підшипників силового диска, в верхній частині виконані зі зменшеним діаметром, причому зазначені частини вертикальних стійок плавно з'єднані конусоподібними ділянками. В нижній частині строго горизонтальне положення переміщуваного силового диска задається взаємодією підшипників з розширеною частиною стійок, а на більшій висоті польоту зазначені підшипники не стикаються зі стійками, що виключає їх вплив на величину прискорення вільного падіння, забезпечуючи лише страховку від аварійного бокового зміщення силової пластини з прикріпленим до неї пробним тілом. Конусоподібні ділянки вертикальних стійок дозволяють плавно "ловити" падаючі вниз елементи, забезпечуючи центрування їх відносно обмотки котушки. При забезпеченні фіксованого вертикального переміщення якоря з силовим диском і вільного вертикального переміщення пробного тіла в верхній частині вертикальні стійки з'єднані з горизонтальними упорами. Розміщення їх на масивній силовій плиті виключає передачу силових імпульсів вакуумній камері. Пружні демпфери усувають різкий удар силового диска об горизонтальні упори, що також сприяє зменшенню вібраційних процесів. Наявність пружних елементів на вертикальних ділянках горизонтальних упорів забезпечує фіксування якоря з силовим диском від падіння і стискання (зменшення внутрішнього діаметра) при взаємодії пробного тіла з силовим диском. На фіг.1 схематично показаний балістичний гравіметр з індукційно-динамічним приводом, який забезпечує вільне вертикальне переміщення якоря з силовим диском і пробним тілом, у якому котушка розташована всередині вакуумної камери, у вихідному стані; на фіг.2 - балістичний гравіметр на фіг.1 в момент вільного польоту якоря з силовим диском і пробним тілом; на фіг.3 - балістичний гравіметр, який забезпечує вільне вертикальне переміщення якоря з силовим диском і пробним тілом, у якому котушка розташована ззовні вакуумної камери, у вихідному стані; на фіг.4 - балістичний гравіметр на фіг.3 в момент вільного польоту якоря з силовим диском і пробним тілом; на фіг.5 - балістичний гравіметр, який забезпечує фіксування якоря з силовим диском пружними елементами, встановленими на вертикальних ділянках горизонтальних упорів, і вільне 96904 8 вертикальне переміщення пробного тіла, у вихідному стані; на фіг.6 - балістичний гравіметр на фіг.5 в момент фіксування якоря з силовим диском пружними елементами; на фіг.7 - балістичний гравіметр на фіг.5 в момент вільного вертикального переміщення пробного тіла; на фіг.8 - вид А на фіг.7; на фіг.9 - балістичний гравіметр, який забезпечує фіксування якоря з силовим диском захватами, і вільне вертикальне переміщення пробного тіла, у вихідному стані; на фіг.10 - балістичний гравіметр на фіг.9 в момент фіксування якоря з силовим диском; на фіг.11 - балістичний гравіметр на фіг.9 в момент вільного вертикального переміщення пробного тіла; на фіг.12 - електрична схема індукційнодинамічного привода балістичного гравіметра, де L1, R2 - індуктивність і опір обмотки; L2, R2 - індуктивність і опір якоря; М12 - взаємна індуктивність між обмоткою і якорем; V - швидкість переміщення якоря вздовж вертикальної осі z; t - час; С - ємність ємнісного накопичувача енергії; VS0, VS1, VS2 тиристори, відповідно, на заряджання ємнісного накопичувача, на відштовхування і гальмування якоря відносно обмотки котушки; фіг.13 - напруга ємнісного накопичувача uс, густина струму в обмотці котушки j1 і в якорі j2; на фіг.14 - імпульс електродинамічної сили fz, що діє на якір; на фіг.15 - вільне вертикальне переміщення Z якоря з силовим диском і пробним тілом на двох часових інтервалах. Балістичний гравіметр з індукційнодинамічним приводом для симетричного способу вимірювань прискорення вільного падіння містить пробне тіло 1 з оптичним кутовим відбивачем 2, вакуумну камеру 3, на верхній стінці якої через оптичне скло (на фіг. не показано) встановлений оптичний випромінювач 4. На днище 5 вакуумної камери 3 на демпферах 6 встановлена масивна силова плита 7 (фіг.1, 2, 5-7, 9-11). На плиті 7 зафіксовані котушка 8 з обмоткою 9, напрямні елементи у вигляді вертикальних стійок 10 круглого перерізу і горизонтальні упори 11 з вертикальними ділянками 12. Котушка 8 виконана з ізоляційного матеріалу, наприклад, склотекстоліту. Обмотка 9 має форму диска, замонолічена епоксидним компаундом і розташована всередині котушки 8. У вакуумній камері 3 розташований якір 13, який з'єднаний з силовим штовхаючим диском 14. Якір виконаний у вигляді диска з електропровідного матеріалу, наприклад міді. Силовий диск виконаний з міцного матеріалу, наприклад нержавіючої сталі. Зовнішній і внутрішній діаметри якоря 13 і обмотки 9 котушки виконані однаковими. У вихідному стані нижня сторона якоря 13 стикається з верхньою стороною обмотки 9 котушки 8 (фіг.1, 2, 5-7, 9-11). 9 Пробне тіло 1 або з'єднано з силовим штовхаючим диском 14 (фіг.1-4), або вільно встановлено без механічного з'єднання (фіг.5-7, 9-11). В силовому штовхаючому диску 14 розташовані упорядковано в тангенціальному напрямку (наприклад під кутом 120°) на одному радіусі r три отвори 15 з підшипниками 16, які охоплюють вертикальні стійки 10 (фіг.8). До днища пробного тіла 1 аксіально приєднаний напрямний конус 17, форма бокових стінок якого збігається з формою напрямної конусоподібної аксіальної виїмки 18 котушки 8. В якорі 13 і силовому диску 14 виконані центральні отвори 19 для напрямного конуса. Вертикальні стійки 10, що забезпечують вільне вертикальне переміщення якоря 13 з силовим диском 14, в нижній частині 10а виконані зі збільшеним діаметром для підшипників 16 силового диска, в верхній частині 106 виконані зі зменшеним діаметром, причому зазначені частини вертикальних стійок плавно з'єднані конусоподібними ділянками 10в (фіг.1-4). Вертикальні стійки 10, що забезпечують фіксоване вертикальне переміщення якоря 13 з силовим диском 14 і вільне вертикальне переміщення пробного тіла 1, в верхній частині з'єднані з горизонтальними упорами 11, до яких приєднані пружні демпфери 20. Встановлені на вертикальних ділянках 12 горизонтальних упорів 11 пружні елементи 21 забезпечують утримання якоря 13 з силовим диском за відсутності взаємодії (контакту) пробного тіла 1 з диском 14 (фіг.5-7). В балістичному гравіметрі на фіг.3, 4 котушка 8 розташована ззовні вакуумної камери 3, а в днищі 5 камери 3 є виїмка для котушки, що спрощує їх установку, на кінцях вертикальних стійок 10 встановлені пружні демпфери 20 і силовий диск 14 з'єднаний з пробним тілом 1. На підшипниках 16, що охоплюють вертикальні стійки 11, встановлені коаксіальні зачепи 22, верхня розширена частина яких взаємодіє з пружними елементами 21 захватів 23. Захвати 23 з'єднані з горизонтальними упорами 11 і забезпечують утримання якоря 13 з силовим диском 14 за відсутності взаємодії (контакту) пробного тіла 1 з силовим диском (фіг.9-11). Електромеханічний привод індукційнодинамічного типу виконаний у вигляді рухомого якоря 13, який магнітно взаємодіє з нерухомою обмоткою 9, яка підключається до ємнісного накопичувача енергії С за допомогою двох тиристорів VS1 і VS2 (фіг.12). Указані тиристори з'єднані зустрічно-паралельно між собою і призначені для забезпечення початкового відштовхування (VS1) і подальшого гальмування (VS2) якоря відносно обмотки котушки. Тиристор VS0 призначений для забезпечення заряджання ємнісного накопичувача С від джерела живлення 24. Керуючі електроди тиристорів VS0, VS1 і VS2 приєднані до блока керування 25. Балістичний гравіметр, який забезпечує вільне вертикальне переміщення якоря з силовим диском, працює наступним чином (фіг.1-4). 96904 10 У вихідному стані (фіг.1 і фіг.3) пробне тіло 1 з оптичним кутковим відбивачем 2 знаходяться в нижньому положенні, при якому забезпечується максимальний магнітний зв'язок між обмоткою 9 і якорем 13 індукційно-динамічного привода. При подачі сигналу від блока керування 25 на тиристор VS0 здійснюється заряджання ємнісного накопичувача С від джерела живлення 24. Після заряджання тиристор VS0 закривається. При подачі сигналу від блока керування 25 тиристор VS1 відкривається і починається розряджання ємнісного накопичувача С на обмотку 9 котушки 8. При цьому в обмотці виникає однополярний імпульс струму густиною jі (фіг.13) через те, що тиристор має односторонню провідність. Під дією струму обмотки виникає магнітне поле, яке наводить в якорі 13 струм густиною j2. Ємнісний накопичувач при цьому змінює полярність напруги uс на протилежну зі зниженою величиною по відношенню до вихідної. Тиристор VS1 закривається. Оскільки струми обмотки 9 і якоря 13 мають протилежну полярність, між ними виникає імпульс аксіальної електродинамічної сили fz (фіг.13) відштовхування, під дією якого якір 13 разом з силовим диском 14 і пробним тілом 1 здійснюють вільне вертикальне переміщення Z (фіг.15). При цьому включається оптичний випромінювач 4, діючий на оптичний кутовий відбивач 2, і здійснюється симетричний спосіб вимірювання прискорення вільного падіння. При падінні якоря 13 вниз в момент наближення його до обмотки 9 з блока керування 25 на тиристор VS2 надходить сигнал на його відкривання і починається розряджання ємнісного накопичувача С на обмотку 9 котушки 8. Оскільки напруга ємнісного накопичувача uс при цьому менше вихідного, то виникаюча електродинамічні сила fz відштовхування від обмотки 9 є достатньою лише для плавного гальмування падаючого вниз якоря 13. На початковому і кінцевому ділянках руху пробного тіла 1 по нижніх частинах 10а вертикальних стійок рухаються підшипники 16, що забезпечують строго горизонтальне положення силового диска 14. На середній ділянці руху пробного тіла 1 верхні частини 106 стійок не стикаються з підшипниками 16, що забезпечує повністю безконтактне переміщення пробного тіла 1, а значить і максимальну точність виміру прискорення вільного падіння g. За рахунок взаємодії підшипників 16 з нижніми частинами 10а вертикальних стійок і аксіального напрямного конуса 17 з аксіальною виїмкою 18 котушки 8 забезпечується розташування якоря 13 відносно обмотки 9 строго аксіальне як на початку, так і при закінченні роботи балістичного гравіметра. Балістичний гравіметр, який забезпечує фіксоване вертикальне переміщення якоря з силовим диском і вільне вертикальне переміщення пробного тіла, працює наступним чином (фіг.5-7, 9-11). У вихідному стані (фіг.5 і фіг.9) пробне тіло 1 з оптичним кутковим відбивачем 2 знаходяться у нижньому положенні. При подачі сигналу з блока керування 25 на тиристор VS0 здійснюється заряджання ємнісного накопичувача С від джерела 11 живлення 24. Після подачі сигналу з блока керування 25 на тиристор VS0 починається розряджання ємнісного накопичувача С на обмотку 9, і якір 13 разом з силовим диском 14 і пробним тілом 1 здійснюють вертикальне переміщення. Підлітаючи до горизонтальних упорів 11, силовий диск 14 стискує пружні демпфери 20 і пружні елементи 21 (фіг.6). При цьому диск 14 плавно гальмується, наближаючись до горизонтальних упорів 11, пружні елементи 21 розтискаються, а пробне тіло 1 покидає силовий диск 14, продовжуючи вільний вертикальний рух. В процесі вільного польоту пробного тіла 1 здійснюється вимір прискорення вільного падіння. Фіксований відносно горизонтальних упорів 11 силовий диск 14 з якорем 13 утримується розтиснутими пружними елементами 21 (фіг.7). В момент падіння пробного тіла 1 відбувається його контакт з силовим диском (фіг.6), пружні елементи 21 розтискаються і здійснюється спільне падіння силового диска 14, якоря 13 і пробного тіла 1. В момент наближення якоря до обмотки 9 з блока керування 25 на тиристор VS2 надходить сигнал на його відкривання і починається розряджання ємнісного накопичувача С на обмотку 9, що призводить до плавного гальмування падаючого вниз якоря 13. За рахунок взаємодії підшипників 16 з вертикальними стійками 10 і аксіального напрямного конуса 17 з аксіальною виїмкою 18 котушки 8 забезпечується розташування якоря 13 відносно обмотки 9 строго аксіальне як на початку, так і після закінчення роботи балістичного гравіметра. 96904 12 Висота стійок 10 може бути невеликою, що обумовлює невелику висоту балістичного гравіметра. Масивна силова плита 7 спільно з демпферами 6 дозволяє практично повністю гасити виникаючі вібраційні процеси, не пропускаючи їх до вакуумної камери 3. Аналогічно розглянутому варіанту (фіг.5-7) працює і варіант балістичного гравіметра, представлений на фіг.9-11. В цьому пристрої на підшипниках 16 встановлені коаксіальні зачепи 22, верхня розширена частина яких взаємодіє з пружними елементами 21 захватів 23, які забезпечують утримання якоря 13 з силовим диском 14 за відсутності контакту пробного тіла 1 з силовим диском (фіг.11). Індукційно-динамічний привод, що пропонується, дозволяє легко регулювати силу і тривалість імпульсу струму в обмотці 9, що дозволяє змінювати висоту підкидання пробного тіла в заданому діапазоні без зміни решти параметрів і положення у просторі балістичного гравіметра. Джерела інформації: 1. А.П. Юзефович, Л.В. Огородова. Гравиметрия. - М.: Недра, 1980. 2. Агрегат 15В 166. Техническое описание ПБ 1.530.001 ТО, МО СССР, 1987. 3. Пат ФР № 2192024, МПК G01V7/14. Баллистический гравиметр для симметричного способа измерений. - Заявка № 2001120196/28, 18.07.2001. - Опубликовано 27.10.2002 (прототип). 4. Крагельский И.В. и др. Трение и износ в вакууме. - М.: Машиностроение, 1973. - 216 с. 13 96904 14 15 96904 16 17 96904 18 19 Комп’ютерна верстка Л. Ціхановська 96904 Підписне 20 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBallistic gravimeter with inductive-dynamical drive for symmetric method of measurement of acceleration of free fall
Автори англійськоюBoliukh Volodymyr Fedorovych, Vinnichenko Oleksandr Ivanovych
Назва патенту російськоюБаллистический гравиметр с индукционно-динамическим приводом для симметричного способа измерений ускорения свободного падения
Автори російськоюБолюх Владимир Федорович, Винниченко Александр Иванович
МПК / Мітки
МПК: G01V 7/14
Мітки: способу, падіння, симетричного, прискорення, приводом, індукційно-динамічним, вільного, балістичний, вимірювань, гравіметр
Код посилання
<a href="https://ua.patents.su/10-96904-balistichnijj-gravimetr-z-indukcijjno-dinamichnim-privodom-dlya-simetrichnogo-sposobu-vimiryuvan-priskorennya-vilnogo-padinnya.html" target="_blank" rel="follow" title="База патентів України">Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірювань прискорення вільного падіння</a>
Навчальний прилад для визначення прискорення вільного падіння
Номер патенту: 32712
Опубліковано: 26.05.2008
Автор: Кондратьєв Денис Ігорович
МПК: G09B 23/08
Мітки: прискорення, вільного, визначення, прилад, падіння, навчальний
Формула / Реферат:
1. Навчальний прилад для визначення прискорення вільного падіння, що містить стійку, секундомір, схему керування з електромагнітом, джерело живлення й металеву кульку, який відрізняється тим, що стійка виконана у вигляді порожнистої труби, укріпленої на основі, при цьому зверху стійки розташований електромагніт, а внизу стійки розташовано фотореле, крім того, схема керування включає цифровий електронний секундомір.2. Навчальний прилад...
Гравіметр для вимірювання абсолютного значення прискорення сили ваги
Номер патенту: 6921
Опубліковано: 31.03.1995
Автор: Федоровський Борис Миколайович
МПК: G01V 7/00
Мітки: значення, ваги, прискорення, абсолютного, гравіметр, вимірювання, сили
Формула / Реферат:
(57) . Гравиметр для измерения абсолютного значения ускорения силы тяжести, содержащий пробное тело, выполненное в виде уголкового светоотражателя и помещенное в вакуумную камеру, интерферометр, систему измерения пути и времени свободного движения пробного тела, блок управления измерениями и катапульту для подбрасывания пробного тела вертикально вверх на заданную высоту, состоящую из катушки соленоида и сердечника, связанного с...
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна
МПК: G01V 7/00
Мітки: сили, аномалій, вимірювань, тяжіння, система, прискорення, авіаційна, гравіметрична
Формула / Реферат:
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас...
Гравіметр для вимірів абсолютного значення прискорення сили тяжіння
Номер патенту: 87638
Опубліковано: 27.07.2009
Автор: Федоровський Борис Миколайович
Мітки: тяжіння, гравіметр, значення, абсолютного, прискорення, вимірів, сили
Формула / Реферат:
Гравіметр для вимірів абсолютного значення прискорення сили тяжіння симетричним способом на морі, який містить: електронний блок регулювання, прилад з відеоекраном, що сполучений з електронним блоком регулювання, соленоїд, сполучений з електронним блоком регулювання; несучий елемент, розташований всередині соленоїда, який має систему електромагнітного центрування, сполучену з електронним блоком регулювання; причому на несучому елементі...
Цифровий гравіметр для абсолютних вимірів прискорення сили ваги
Номер патенту: 88060
Опубліковано: 10.09.2009
Автори: Сидоренко Горіслав Степанович, Омельченко Анатолій Васильович, Карпінський Юрій Олександрович, Мірошниченко Олег Миколайович, Гнатенко Володимир Григорович
МПК: G01V 7/00
Мітки: прискорення, абсолютних, ваги, гравіметр, цифровий, сили, вимірів
Формула / Реферат:
Цифровий гравіметр для абсолютних вимірювань прискорення сили ваги, що містить послідовно розміщені датчик переміщень, перетворювач, обчислювальну систему, а також систему індикації, який відрізняється тим, що перетворювач з'єднаний з обчислювальною системою через узгоджувальний пристрій, який складається з послідовно з'єднаних регулюючого і високошвидкісного підсилювачів, вихід якого з'єднаний з швидкісним аналоговим перетворювачем (ШАП),...
Попередній патент: Вихрова труба комбінована
Наступний патент: Глушник шуму
Випадковий патент: Роликова дошка