Спосіб визначення критичного зниження частоти обертання вала у робочій машині та робоча машина
Формула / Реферат
1. Спосіб визначення критичного зниження частоти обертання вала у робочій машині принаймні з одним контрольованим валом з приводом від колінчастого вала двигуна, який включає наступні стадії:
(a) стадію, на якій визначають фактичну частоту обертання зазначеного колінчастого вала;
(b) стадію, на якій визначають фактичну частоту обертання першого контрольованого вала;
який відрізняється тим, що включає наступні стадії:
(c) стадію, на якій визначають фільтровану частоту обертання зазначеного першого контрольованого вала на основі алгоритму, в якому використовують зазначену фактичну частоту обертання зазначеного першого контрольованого вала, зазначену фактичну частоту обертання зазначеного колінчастого вала й контрольну частоту обертання зазначеного колінчастого вала;
(d) стадію, на якій зазначену фільтровану частоту обертання зазначеного першого контрольованого вала порівнюють із зазначеною фактичною частотою обертання зазначеного першого контрольованого вала;
(e) стадію, на якій визначають, чи відхиляється зазначена фактична частота обертання зазначеного першого контрольованого вала від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на задану величину;
(f) стадію, на якій видають аварійний сигнал, якщо зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину.
2. Спосіб за п. 1, який відрізняється тим, що стадії (а)-(е) здійснюють упродовж заданого часу, і якщо наприкінці зазначеного заданого часу зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину, видають зазначений аварійний сигнал.
3. Спосіб за п. 2, який відрізняється тим, що здійснюють для кожного контрольованого вала з приводом від зазначеного колінчастого вала зазначеного двигуна.
4. Спосіб за п. 1, який відрізняється тим, що зазначену контрольну частоту обертання вибирають постійною із значенням, відповідним номінальній максимальній частоті обертання зазначеного колінчастого вала зазначеного двигуна.
5. Спосіб за п. 1, який відрізняється тим, що зазначену задану величину відхилення вибирають як приблизно 25 відсотків.
6. Спосіб за п. 1, де стадія (с), на якій визначають фільтровану частоту обертання зазначеного першого контрольованого вала, включає наступні стадії:
(h) стадію, на якій визначають зміщену частоту обертання зазначеного першого контрольованого вала, виходячи принаймні із зазначеної фактичної частоти обертання зазначеного першого контрольованого вала, зазначеної фактичної частоти обертання зазначеного колінчастого вала й контрольної частоти обертання зазначеного колінчастого вала;
(і) стадію, на якій визначають фільтровану частоту обертання зазначеного першого контрольованого вала шляхом пропускання зазначеної зміщеної частоти обертання зазначеного першого контрольованого вала через фільтр нижніх частот.
7. Спосіб за п. 6, який відрізняється тим, що на стадії, на якій визначають зазначену зміщену частоту обертання, зазначену зміщену частоту обертання розраховують за формулою:
BRSS = ARSS х (ARSC/RRSC),
де: BRSS - зазначена зміщена частота обертання зазначеного першого контрольованого вала;
ARSS - зазначена фактична частота обертання зазначеного першого контрольованого вала;
ARSC - зазначена фактична частота обертання зазначеного колінчастого вала;
RRSC - зазначена контрольна частота обертання зазначеного колінчастого вала.
8. Спосіб за п. 6, який відрізняється тим, що на стадії, на якій визначають зазначену фільтровану частоту обертання контрольованого вала, зазначену фільтровану частоту обертання контрольованого вала розраховують за формулою:
FRSS = (FRSSpre х 99 + BRSS) / 100,
де: FRSS - поточна фільтрована частота обертання зазначеного першого контрольованого вала;
FRSSpre - попередня фільтрована частота обертання зазначеного першого контрольованого вала;
BRSS - зазначена зміщена частота обертання зазначеного першого контрольованого вала.
9. Робоча машина, яка містить: двигун, який має колінчастий вал;
робочий вузол, конструктивно виконаний для здійснення робочої функції, причому зазначений робочий вузол має принаймні один контрольований вал, який з'єднаний із зазначеним колінчастим валом зазначеного двигуна й приводиться ним;
систему контролю вала, яка має контрольний пристрій і кілька датчиків, комунікативно з'єднаних із зазначеним контрольним пристроєм, причому зазначені кілька датчиків контролюють частоту обертання зазначеного колінчастого вала й зазначеного принаймні одного контрольованого вала,
причому зазначений контрольний пристрій містить контролер і пристрій аварійної сигналізації, причому зазначений контрольний пристрій, виконаний з можливістю виконувати програмні команди для виявлення критичного зниження частоти обертання кожного контрольованого вала, включаючи:
(a) визначення фактичної частоти обертання зазначеного колінчастого вала;
(b) визначення фактичної частоти обертання першого контрольованого вала;
(c) визначення фільтрованої частоти обертання зазначеного першого контрольованого вала на основі алгоритму, в якому використовуються зазначена фактична частота обертання зазначеного першого контрольованого вала, зазначена фактична частота обертання зазначеного колінчастого вала й контрольна частота обертання зазначеного колінчастого вала;
(d) порівняння зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала із зазначеною фактичною частотою обертання зазначеного першого контрольованого вала;
(е) визначення, чи відхиляється зазначена фактична частота обертання зазначеного першого контрольованого вала від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на задану величину; й
(f) видача аварійного сигналу, якщо зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину.
10. Робоча машина за п. 9, яка відрізняється тим, що зазначений контрольний пристрій виконаний з можливістю здійснювати стадії (а)-(е) упродовж заданого часу, і, якщо наприкінці зазначеного заданого часу зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину, видається зазначений аварійний сигнал.
11. Робоча машина за п. 10, яка відрізняється тим, що зазначений контрольний пристрій виконаний з можливістю здійснювати стадії (а)-(е) для кожного вала з кількох контрольованих валів.
Текст
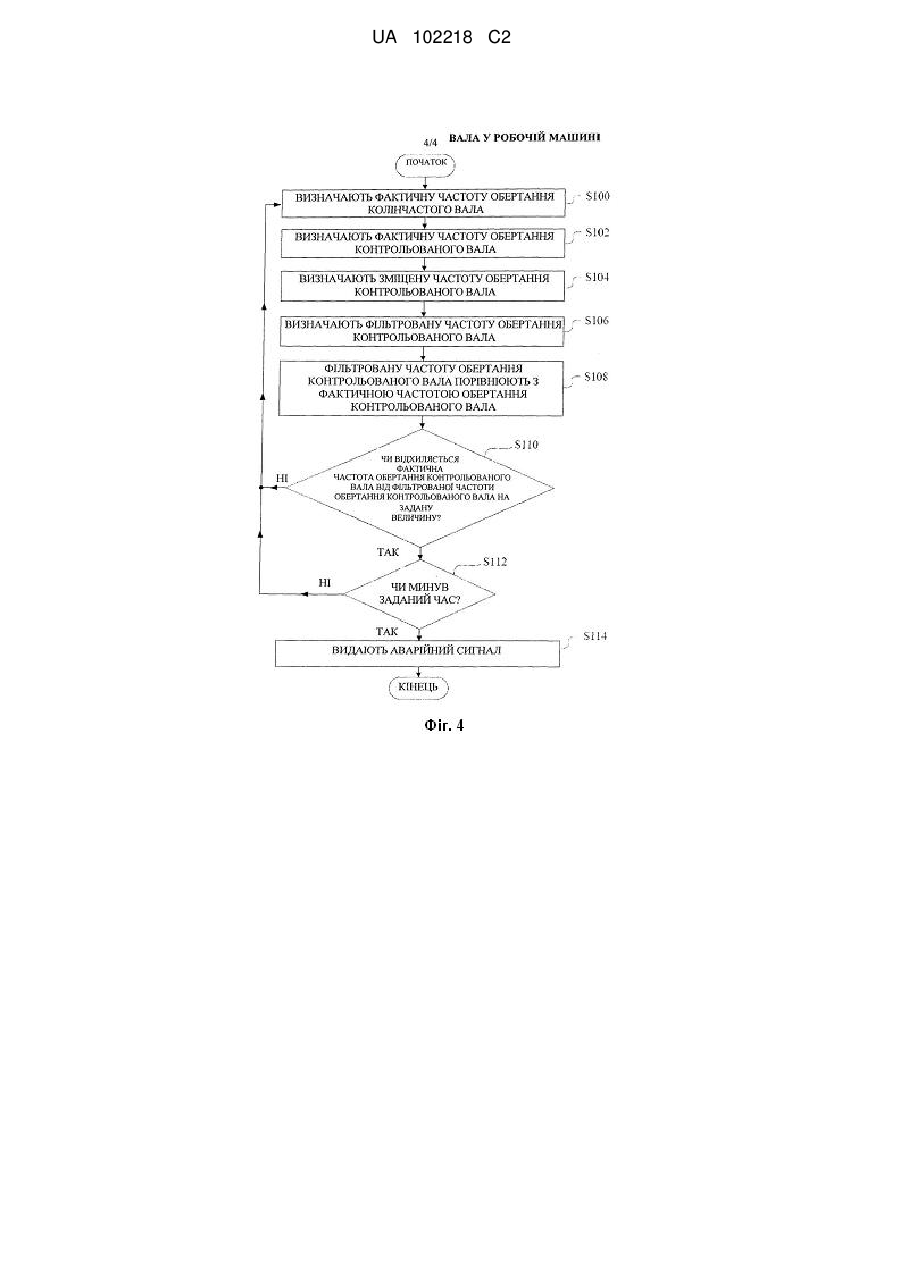
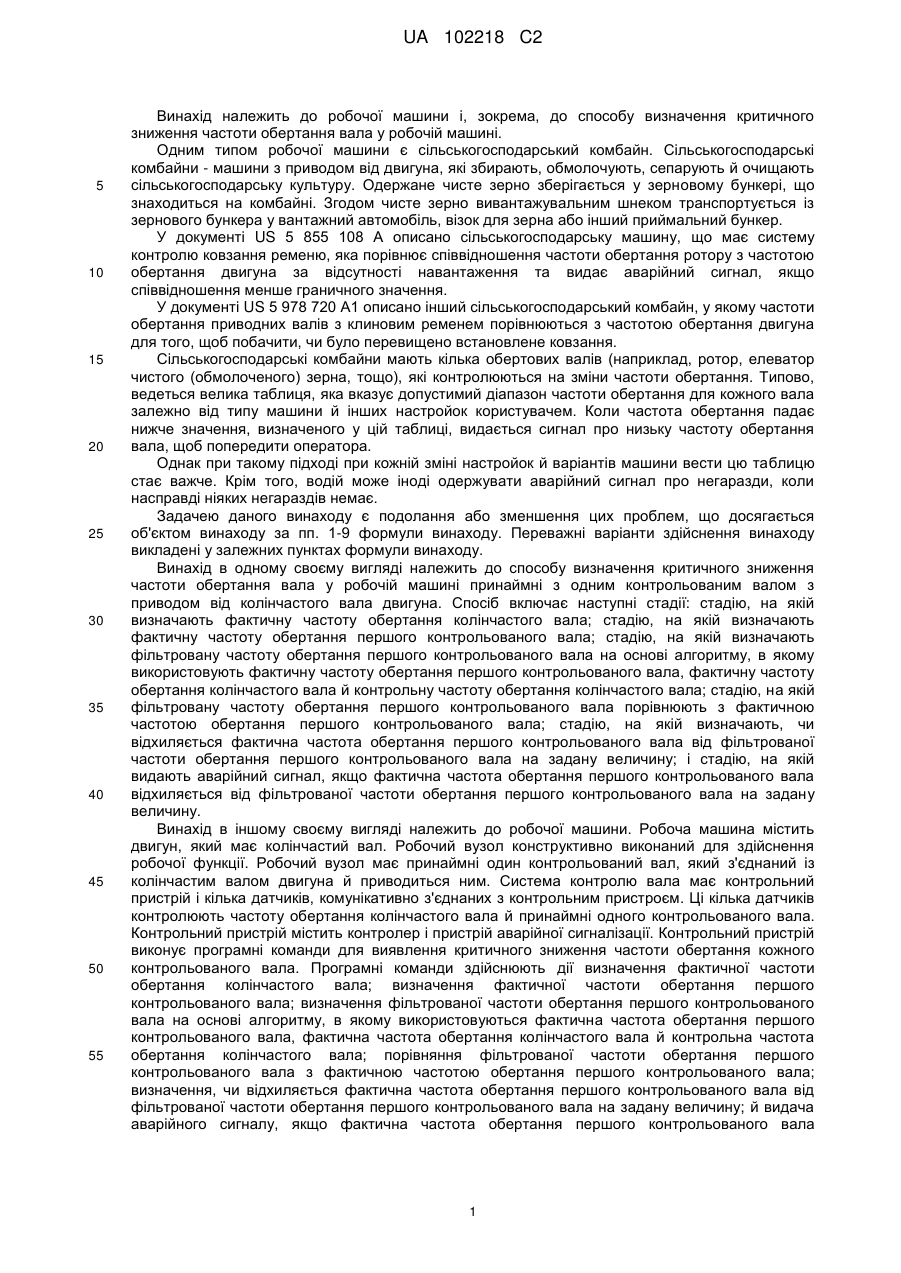
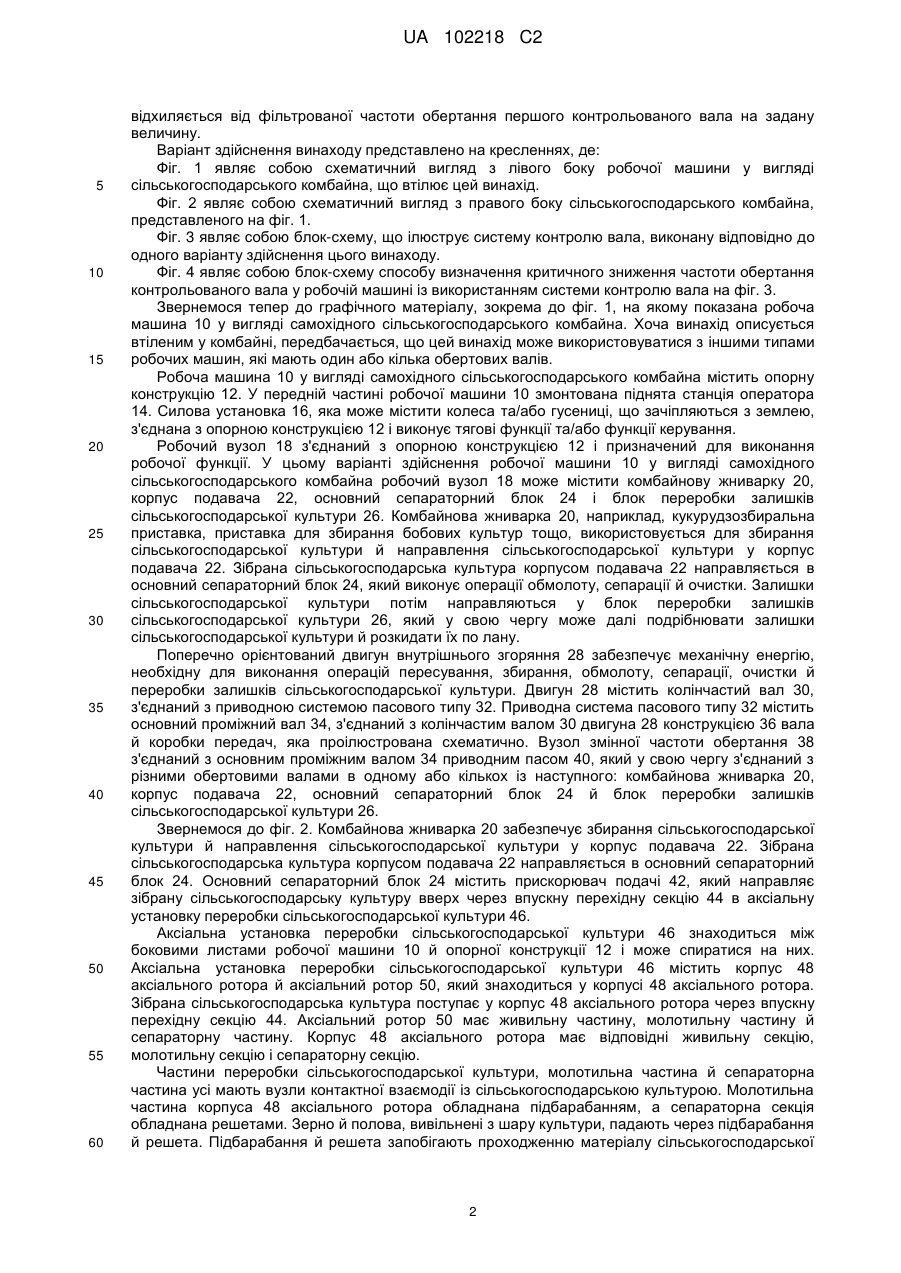
Реферат: Спосіб визначення критичного зниження частоти обертання вала у робочій машині принаймні з одним контрольованим валом з приводом від колінчастого вала двигуна включає наступні стадії: стадію, на якій визначають фактичну частоту обертання колінчастого вала; стадію, на якій визначають фактичну частоту обертання першого контрольованого вала; стадію, на якій визначають фільтровану частоту обертання першого контрольованого вала на основі алгоритму, в якому використовують фактичну частоту обертання першого контрольованого вала, фактичну частоту обертання колінчастого вала й контрольну частоту обертання колінчастого вала; стадію, на якій фільтровану частоту обертання першого контрольованого вала порівнюють з фактичною частотою обертання першого контрольованого вала; стадію, на якій визначають, чи відхиляється фактична частота обертання першого контрольованого вала від фільтрованої частоти обертання першого контрольованого вала на задану величину; і стадію, на якій видають аварійний сигнал, якщо фактична частота обертання першого контрольованого вала відхиляється від фільтрованої частоти обертання першого контрольованого вала на задану величину. UA 102218 C2 (12) UA 102218 C2 UA 102218 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до робочої машини і, зокрема, до способу визначення критичного зниження частоти обертання вала у робочій машині. Одним типом робочої машини є сільськогосподарський комбайн. Сільськогосподарські комбайни - машини з приводом від двигуна, які збирають, обмолочують, сепарують й очищають сільськогосподарську культуру. Одержане чисте зерно зберігається у зерновому бункері, що знаходиться на комбайні. Згодом чисте зерно вивантажувальним шнеком транспортується із зернового бункера у вантажний автомобіль, візок для зерна або інший приймальний бункер. У документі US 5 855 108 А описано сільськогосподарську машину, що має систему контролю ковзання ременю, яка порівнює співвідношення частоти обертання ротору з частотою обертання двигуна за відсутності навантаження та видає аварійний сигнал, якщо співвідношення менше граничного значення. У документі US 5 978 720 А1 описано інший сільськогосподарський комбайн, у якому частоти обертання приводних валів з клиновим ременем порівнюються з частотою обертання двигуна для того, щоб побачити, чи було перевищено встановлене ковзання. Сільськогосподарські комбайни мають кілька обертових валів (наприклад, ротор, елеватор чистого (обмолоченого) зерна, тощо), які контролюються на зміни частоти обертання. Типово, ведеться велика таблиця, яка вказує допустимий діапазон частоти обертання для кожного вала залежно від типу машини й інших настройок користувачем. Коли частота обертання падає нижче значення, визначеного у цій таблиці, видається сигнал про низьку частоту обертання вала, щоб попередити оператора. Однак при такому підході при кожній зміні настройок й варіантів машини вести цю таблицю стає важче. Крім того, водій може іноді одержувати аварійний сигнал про негаразди, коли насправді ніяких негараздів немає. Задачею даного винаходу є подолання або зменшення цих проблем, що досягається об'єктом винаходу за пп. 1-9 формули винаходу. Переважні варіанти здійснення винаходу викладені у залежних пунктах формули винаходу. Винахід в одному своєму вигляді належить до способу визначення критичного зниження частоти обертання вала у робочій машині принаймні з одним контрольованим валом з приводом від колінчастого вала двигуна. Спосіб включає наступні стадії: стадію, на якій визначають фактичну частоту обертання колінчастого вала; стадію, на якій визначають фактичну частоту обертання першого контрольованого вала; стадію, на якій визначають фільтровану частоту обертання першого контрольованого вала на основі алгоритму, в якому використовують фактичну частоту обертання першого контрольованого вала, фактичну частоту обертання колінчастого вала й контрольну частоту обертання колінчастого вала; стадію, на якій фільтровану частоту обертання першого контрольованого вала порівнюють з фактичною частотою обертання першого контрольованого вала; стадію, на якій визначають, чи відхиляється фактична частота обертання першого контрольованого вала від фільтрованої частоти обертання першого контрольованого вала на задану величину; і стадію, на якій видають аварійний сигнал, якщо фактична частота обертання першого контрольованого вала відхиляється від фільтрованої частоти обертання першого контрольованого вала на задану величину. Винахід в іншому своєму вигляді належить до робочої машини. Робоча машина містить двигун, який має колінчастий вал. Робочий вузол конструктивно виконаний для здійснення робочої функції. Робочий вузол має принаймні один контрольований вал, який з'єднаний із колінчастим валом двигуна й приводиться ним. Система контролю вала має контрольний пристрій і кілька датчиків, комунікативно з'єднаних з контрольним пристроєм. Ці кілька датчиків контролюють частоту обертання колінчастого вала й принаймні одного контрольованого вала. Контрольний пристрій містить контролер і пристрій аварійної сигналізації. Контрольний пристрій виконує програмні команди для виявлення критичного зниження частоти обертання кожного контрольованого вала. Програмні команди здійснюють дії визначення фактичної частоти обертання колінчастого вала; визначення фактичної частоти обертання першого контрольованого вала; визначення фільтрованої частоти обертання першого контрольованого вала на основі алгоритму, в якому використовуються фактична частота обертання першого контрольованого вала, фактична частота обертання колінчастого вала й контрольна частота обертання колінчастого вала; порівняння фільтрованої частоти обертання першого контрольованого вала з фактичною частотою обертання першого контрольованого вала; визначення, чи відхиляється фактична частота обертання першого контрольованого вала від фільтрованої частоти обертання першого контрольованого вала на задану величину; й видача аварійного сигналу, якщо фактична частота обертання першого контрольованого вала 1 UA 102218 C2 5 10 15 20 25 30 35 40 45 50 55 60 відхиляється від фільтрованої частоти обертання першого контрольованого вала на задану величину. Варіант здійснення винаходу представлено на кресленнях, де: Фіг. 1 являє собою схематичний вигляд з лівого боку робочої машини у вигляді сільськогосподарського комбайна, що втілює цей винахід. Фіг. 2 являє собою схематичний вигляд з правого боку сільськогосподарського комбайна, представленого на фіг. 1. Фіг. 3 являє собою блок-схему, що ілюструє систему контролю вала, виконану відповідно до одного варіанту здійснення цього винаходу. Фіг. 4 являє собою блок-схему способу визначення критичного зниження частоти обертання контрольованого вала у робочій машині із використанням системи контролю вала на фіг. 3. Звернемося тепер до графічного матеріалу, зокрема до фіг. 1, на якому показана робоча машина 10 у вигляді самохідного сільськогосподарського комбайна. Хоча винахід описується втіленим у комбайні, передбачається, що цей винахід може використовуватися з іншими типами робочих машин, які мають один або кілька обертових валів. Робоча машина 10 у вигляді самохідного сільськогосподарського комбайна містить опорну конструкцію 12. У передній частині робочої машини 10 змонтована піднята станція оператора 14. Силова установка 16, яка може містити колеса та/або гусениці, що зачіпляються з землею, з'єднана з опорною конструкцією 12 і виконує тягові функції та/або функції керування. Робочий вузол 18 з'єднаний з опорною конструкцією 12 і призначений для виконання робочої функції. У цьому варіанті здійснення робочої машини 10 у вигляді самохідного сільськогосподарського комбайна робочий вузол 18 може містити комбайнову жниварку 20, корпус подавача 22, основний сепараторний блок 24 і блок переробки залишків сільськогосподарської культури 26. Комбайнова жниварка 20, наприклад, кукурудзозбиральна приставка, приставка для збирання бобових культур тощо, використовується для збирання сільськогосподарської культури й направлення сільськогосподарської культури у корпус подавача 22. Зібрана сільськогосподарська культура корпусом подавача 22 направляється в основний сепараторний блок 24, який виконує операції обмолоту, сепарації й очистки. Залишки сільськогосподарської культури потім направляються у блок переробки залишків сільськогосподарської культури 26, який у свою чергу може далі подрібнювати залишки сільськогосподарської культури й розкидати їх по лану. Поперечно орієнтований двигун внутрішнього згоряння 28 забезпечує механічну енергію, необхідну для виконання операцій пересування, збирання, обмолоту, сепарації, очистки й переробки залишків сільськогосподарської культури. Двигун 28 містить колінчастий вал 30, з'єднаний з приводною системою пасового типу 32. Приводна система пасового типу 32 містить основний проміжний вал 34, з'єднаний з колінчастим валом 30 двигуна 28 конструкцією 36 вала й коробки передач, яка проілюстрована схематично. Вузол змінної частоти обертання 38 з'єднаний з основним проміжним валом 34 приводним пасом 40, який у свою чергу з'єднаний з різними обертовими валами в одному або кількох із наступного: комбайнова жниварка 20, корпус подавача 22, основний сепараторний блок 24 й блок переробки залишків сільськогосподарської культури 26. Звернемося до фіг. 2. Комбайнова жниварка 20 забезпечує збирання сільськогосподарської культури й направлення сільськогосподарської культури у корпус подавача 22. Зібрана сільськогосподарська культура корпусом подавача 22 направляється в основний сепараторний блок 24. Основний сепараторний блок 24 містить прискорювач подачі 42, який направляє зібрану сільськогосподарську культуру вверх через впускну перехідну секцію 44 в аксіальну установку переробки сільськогосподарської культури 46. Аксіальна установка переробки сільськогосподарської культури 46 знаходиться між боковими листами робочої машини 10 й опорної конструкції 12 і може спиратися на них. Аксіальна установка переробки сільськогосподарської культури 46 містить корпус 48 аксіального ротора й аксіальний ротор 50, який знаходиться у корпусі 48 аксіального ротора. Зібрана сільськогосподарська культура поступає у корпус 48 аксіального ротора через впускну перехідну секцію 44. Аксіальний ротор 50 має живильну частину, молотильну частину й сепараторну частину. Корпус 48 аксіального ротора має відповідні живильну секцію, молотильну секцію і сепараторну секцію. Частини переробки сільськогосподарської культури, молотильна частина й сепараторна частина усі мають вузли контактної взаємодії із сільськогосподарською культурою. Молотильна частина корпуса 48 аксіального ротора обладнана підбарабанням, а сепараторна секція обладнана решетами. Зерно й полова, вивільнені з шару культури, падають через підбарабання й решета. Підбарабання й решета запобігають проходженню матеріалу сільськогосподарської 2 UA 102218 C2 5 10 15 20 25 30 35 40 45 50 55 60 культури, більшому, ніж зерно або полова, в очисну систему 52, яка містить очисний вентилятор 54. Зерно або полова, що падають через підбарабання й решета, направляються в очисну систему 52, яка видаляє полову із зерна. Шнек охвістя 56 направляє охвістя, зібране на дні очисної системи 52, в елеватор охвістя 58 для повторної доставки в очисну систему 52 для повторної переробки. Чисте зерно шнеком чистого зерна 60 направляється в елеватор чистого зерна 62 й потім у шнек бункера 64. Шнек бункера 64 направляє зерно у зерновий бункер або зернове відділення 66. Із зернового бункера 66 зерно видаляється вивантажним шнеком 68. Коли залишки сільськогосподарської культури, наприклад, солома, стебла, полова, пил тощо, досягають кінця основного сепараторного блока 24, вони виштовхуються через випускний канал у блок переробки залишків сільськогосподарської культури 26. Блок переробки залишків сільськогосподарської культури 26 містить, наприклад, молотильний барабан (бітер) 70, який викидає залишки сільськогосподарської культури ззаду комбайна. Блок переробки залишків сільськогосподарської культури 26 може містити, наприклад, ще й соломорізку (не показана). Звернемося до фіг. 3, на якому показана блок-схема системи контролю вала 80, конструктивно виконана відповідно до одного варіанту здійснення цього винаходу. Система контролю вала 80 має контрольний пристрій 82 й кілька датчиків 84. Контрольний пристрій 82 може встановлюватися на станції оператора 14 і містить контролер 86, комунікативно з'єднаний із пристроєм аварійної сигналізації 88 дротовим з'єднанням 90. Кілька датчиків 84 комунікативно з'єднані з контролером 86 контрольного пристрою 82 каналом зв'язку 92, таким, як, наприклад, багатожильний кабель. Контролер 86 може конструктивно виконуватися лише з апаратних засобів або з апаратних засобів, що використовують програмно-апаратні засоби/програмне забезпечення, які виконують задану операцію контролю вала. Наприклад, контролер 86 може конструктивно виконуватися з мікропроцесором і пов'язаним запам'ятовувальним пристроєм з командами на виконання операції контролю вала, які зберігаються у запам'ятовувальному пристрої. Альтернативно, алгоритм контролю вала може бути жорстко змонтований ("зашитий") у логіці, наприклад у вигляді прикладної інтегральної схеми. Пристрій аварійної сигналізації 88 може видавати звуковий та/або візуальний аварійний сигнал, що сприймається оператором робочої машини 10. Наприклад, звуковий аварійний сигнал може бути повторюваним звуком або зумером, а візуальний аварійний сигнал може бути горінням індикаторної лампочки або горінням частини схематичної картини контрольованих валів. Для контролю частоти обертання колінчастого вала 30 і частоти обертання кількох контрольованих валів 94, у цьому варіанті здійснення окремо позначених як контрольовані вали 94-1, 94-2, 94-3, 94-4, 94-5, 94-6, 94-7, 94-8…94-N, де N - певне кінцеве число контрольованих валів, можуть використовуватися кілька датчиків 84, у цьому варіанті здійснення окремо позначених як датчики 84-ЕС, 84-1, 84-2, 84-3, 84-4, 84-5, 84-6, 84-7, 84-8…84-N. Кожен з кількох датчиків 84 може мати відоме конструктивне виконання датчика, таке, як індуктивний датчик, оптичний датчик, датчик на ефекті Холла тощо. У цьому примірному варіанті здійснення, у якому робочою машиною 10 є сільськогосподарський комбайн, контрольованими валами 94-1, 94-2, 94-3, 94-4, 94-5, 94-6, 94-7, 94-8…94-N можуть бути вали, наприклад, відповідно пов'язані з прискорювачем подачі 42, аксіальним ротором 50, очисним вентилятором 54, елеватором охвістя 58, шнеком чистого зерна 60, елеватором чистого зерна 62, викидний молотильний барабан 70 і соломорізки (факультативної). Кожен з кількох контрольованих валів 94 приводиться безпосередньо або опосередковано колінчастим валом 30 двигуна внутрішнього згоряння 28. Фахівцеві зрозуміло, що число контрольованих валів можна збільшити або зменшити у порівнянні до числа, показаного у цьому примірному варіанті здійснення. Фіг. 4 являє собою блок-схему способу визначення критичного зниження частоти обертання контрольованого вала у робочій машині, такій, як робоча машина 10, відповідно до одного варіанту здійснення цього винаходу. Цей спосіб можуть здійснювати, наприклад, як програмні команди, які виконуються за допомогою системи контролю вала 80 на фіг. 3. На стадії S100 визначають фактичну частоту обертання колінчастого вала двигуна. Фактичну частоту обертання колінчастого вала 30 двигуна 28 можуть визначати, наприклад, датчиком 84-ЕС, яким створюють сигнал, відповідний частоті обертання колінчастого вала 30, яким у свою чергу подають сигнал, що представляє фактичну частоту обертання колінчастого вала 30, у контролер 86 контрольного пристрою 82. Наприклад, якщо датчик 84-ЕС представляє собою вузол індуктивного датчика, первинний сигнал може вказувати на частоту обертання, яка -1 контролером 86 переводиться в оберти на хвилину (хв ). Наприклад, SpeedRPM=SpeedHz x 60/PPR, де SpeedRPM - фактична частота обертання в обертах на хвилину, SpeedHz 3 UA 102218 C2 5 10 15 20 25 30 35 40 45 50 55 фактична частот обертання у герцах (частот), a PPR - число вихідних імпульсів на оберт контрольованого вала. На стадії S102 визначають фактичну частоту обертання контрольованого вала. Наприклад, контрольованим валом може бути один з кількох контрольованих валів 94, який контролюють одним з відповідних кількох датчиків 84. Для цілей цього прикладу приймається, що вал, який представляє інтерес, - це контрольований вал 94-2, пов'язаний з аксіальним ротором 50, який контролюють датчиком 84-2. У представлених варіантах здійснення датчик 84-2 представляє собою вузол індуктивного датчика, первинний сигнал може вказувати на частоту обертання -1 контрольованого вала 94-2, яка контролером 86 переводиться в оберти на хвилину (хв ). На стадії S104 визначають зміщену частоту обертання контрольованого вала, наприклад, контрольованого вала 94-2, виходячи принаймні з фактичної частоти обертання контрольованого вала, наприклад, контрольованого вала 94-2, фактичної частоти обертання колінчастого вала 30 і контрольної частоти обертання колінчастого вала 30. Контрольна частота обертання колінчастого вала 30 є постійною, маючи значення, що відповідає номінальній максимальній частоті обертання колінчастого вала 30 двигуна 28. В одному варіанті здійснення, -1 наприклад, контрольна частота обертання колінчастого вала 30 складає 2340 хв . На стадії, на якій визначають зміщену частоту обертання, зміщену частоту обертання можуть розраховувати контролером 86 контрольного пристрою 82 за логікою, представленою формулою: BRSS=ARSS х (ARSC/RRSC), де: BRSS - зміщена частота обертання контрольованого вала, наприклад, контрольованого вала 94-2; ARSS - фактична частота обертання контрольованого вала, наприклад, контрольованого вала 94-2; ARSC - фактична частота обертання колінчастого вала 30; RRSC - контрольна частота обертання колінчастого вала 30. На стадії S106 визначають фільтровану частоту обертання контрольованого вала, наприклад, контрольованого вала 94-2, шляхом пропускання зміщеної частоти обертання контрольованого вала через фільтр нижніх частот. На стадії, на якій визначають фільтровану частоту обертання контрольованого вала, цю частоту можуть розраховувати контролером 86 контрольного пристрою 82 за логікою фільтрування, представленою формулою: FRSS = (FRSSpre х 99+BRSS) / 100, де: FRSS - поточна фільтрована частот обертання контрольованого вала, наприклад, контрольованого вала 94-2; FRSSpre - попередня фільтрована частота обертання контрольованого вала, наприклад, контрольованого вала 94-2; BRSS - зміщена частота обертання контрольованого вала, наприклад, контрольованого вала 94-2. Таким чином, якщо зміщена частота обертання із часом повільно знімається (наприклад, через температуру гідравлічної системи або втручання оператора), логіка фільтрування запобігатиме генеруванню будь-яких аварійних сигналів. Однак якщо зміщена частота обертання контрольованого вала несподівано падає, система контролю вала 80 може генерувати аварійний сигнал, який сповіщає водія про низьку частоту обертання вала, якщо виконані усі інші умови для генерування аварійного сигналу. На стадії S108 фільтровану частоту обертання контрольованого вала порівнюють з фактичною частотою обертання контрольованого вала. На стадії S110 визначають, чи відхиляється фактична частота обертання контрольованого вала від фільтрованої частоти обертання контрольованого вала на задану величину. В одному варіанті здійснення, наприклад, задану величину вибирають як 25 відсотків. Однак фахівцеві зрозуміло, що задану величину можуть вибирати більшою або меншою за 25 відсотків залежно від випадку застосування й бажаної чутливості до зміни. Якщо фактична частота обертання контрольованого вала не відхиляється від фільтрованої частоти обертання контрольованого вала на задану величину (тобто, визначення на стадії S110 є "НІ"), то у процесі повертаються на стадію S100, і процес повторюють. Якщо фактична частота обертання контрольованого вала відхиляється від фільтрованої частоти обертання контрольованого вала на задану величину (тобто, визначення на стадії S110 є "ТАК"), то у процесі переходять на стадію S112. 4 UA 102218 C2 5 10 15 20 На стадії S112 визначають, чи не минув заданий час. В одному варіанті здійснення, наприклад, заданий час вибирають як дві секунди. Однак фахівцеві зрозуміло, що заданий час можуть вибирати більшим або меншим за дві секунди залежно від випадку застосування й бажаної чутливості до зміни. Якщо заданий час не минув (тобто, визначення на стадії S112 є "НІ"), то у процесі повертаються на стадію S100, і процес повторюють. Якщо заданий час минув (тобто, визначення на стадії S112 є "ТАК"), то у процесі переходять на стадію S114. На стадії S114 видають аварійний сигнал 88, наприклад, контролером 86 контрольного пристрою 82, яким вказують, що контрольований вал, наприклад, контрольований вал 94-2, наразився на критичне зниження частоти обертання вала. Оператор робочої машини 10 може тоді вжити коригувальних заходів, щоб усунути причину спрацьовування аварійної сигналізації. Аварійний сигнал може скидатися, наприклад, кожного разу, коли відчіпляється корпус подавача 22. При цьому система контролю вала 80 настроюватиметься на повторне вивчення фактичних частот обертання валів і повторно розраховуватиме пов'язані фільтровані частоти обертання кожного контрольованого вала, коли корпус подавача 22 знову зачеплений. Крім того, це забезпечує, що будь-які зміни конструктивного виконання (наприклад, настройки на низьку частоту обертання замість високої частоти обертання) не призведе до аварійних сигналів про негаразди. Для легкості обговорення спосіб на фіг. 4 описаний стосовно одного контрольованого вала, наприклад, контрольованого вала 94-2. Однак вищеописаним способом можна контролювати роботу кожного з контрольованих валів 94 - одночасно або послідовно. Вище описаний переважний варіант здійснення, але зрозуміло, що можливі інші варіанти у межах обсягу цього винаходу, визначеного доданою формулою винаходу. 25 ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Спосіб визначення критичного зниження частоти обертання вала у робочій машині принаймні з одним контрольованим валом з приводом від колінчастого вала двигуна, який включає наступні стадії: (a) стадію, на якій визначають фактичну частоту обертання зазначеного колінчастого вала; (b) стадію, на якій визначають фактичну частоту обертання першого контрольованого вала; який відрізняється тим, що включає наступні стадії: (c) стадію, на якій визначають фільтровану частоту обертання зазначеного першого контрольованого вала на основі алгоритму, в якому використовують зазначену фактичну частоту обертання зазначеного першого контрольованого вала, зазначену фактичну частоту обертання зазначеного колінчастого вала й контрольну частоту обертання зазначеного колінчастого вала; (d) стадію, на якій зазначену фільтровану частоту обертання зазначеного першого контрольованого вала порівнюють із зазначеною фактичною частотою обертання зазначеного першого контрольованого вала; (e) стадію, на якій визначають, чи відхиляється зазначена фактична частота обертання зазначеного першого контрольованого вала від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на задану величину; (f) стадію, на якій видають аварійний сигнал, якщо зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину. 2. Спосіб за п. 1, який відрізняється тим, що стадії (а)-(е) здійснюють упродовж заданого часу, і якщо наприкінці зазначеного заданого часу зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину, видають зазначений аварійний сигнал. 3. Спосіб за п. 2, який відрізняється тим, що здійснюють для кожного контрольованого вала з приводом від зазначеного колінчастого вала зазначеного двигуна. 4. Спосіб за п. 1, який відрізняється тим, що зазначену контрольну частоту обертання вибирають постійною із значенням, відповідним номінальній максимальній частоті обертання зазначеного колінчастого вала зазначеного двигуна. 5. Спосіб за п. 1, який відрізняється тим, що зазначену задану величину відхилення вибирають як приблизно 25 відсотків. 5 UA 102218 C2 5 10 15 20 25 30 35 40 45 50 55 6. Спосіб за п. 1, де стадія (с), на якій визначають фільтровану частоту обертання зазначеного першого контрольованого вала, включає наступні стадії: (h) стадію, на якій визначають зміщену частоту обертання зазначеного першого контрольованого вала, виходячи принаймні із зазначеної фактичної частоти обертання зазначеного першого контрольованого вала, зазначеної фактичної частоти обертання зазначеного колінчастого вала й контрольної частоти обертання зазначеного колінчастого вала; (і) стадію, на якій визначають фільтровану частоту обертання зазначеного першого контрольованого вала шляхом пропускання зазначеної зміщеної частоти обертання зазначеного першого контрольованого вала через фільтр нижніх частот. 7. Спосіб за п. 6, який відрізняється тим, що на стадії, на якій визначають зазначену зміщену частоту обертання, зазначену зміщену частоту обертання розраховують за формулою: BRSS=ARSSх(ARSC/RRSC), де: BRSS - зазначена зміщена частота обертання зазначеного першого контрольованого вала; ARSS - зазначена фактична частота обертання зазначеного першого контрольованого вала; ARSC - зазначена фактична частота обертання зазначеного колінчастого вала; RRSC - зазначена контрольна частота обертання зазначеного колінчастого вала. 8. Спосіб за п. 6, який відрізняється тим, що на стадії, на якій визначають зазначену фільтровану частоту обертання контрольованого вала, зазначену фільтровану частоту обертання контрольованого вала розраховують за формулою: FRSS=(FRSSpreх99+BRSS)/100, де: FRSS - поточна фільтрована частота обертання зазначеного першого контрольованого вала; FRSSpre - попередня фільтрована частота обертання зазначеного першого контрольованого вала; BRSS - зазначена зміщена частота обертання зазначеного першого контрольованого вала. 9. Робоча машина, яка містить: двигун, який має колінчастий вал; робочий вузол, конструктивно виконаний для здійснення робочої функції, причому зазначений робочий вузол має принаймні один контрольований вал, який з'єднаний із зазначеним колінчастим валом зазначеного двигуна й приводиться ним; систему контролю вала, яка має контрольний пристрій і кілька датчиків, комунікативно з'єднаних із зазначеним контрольним пристроєм, причому зазначені кілька датчиків контролюють частоту обертання зазначеного колінчастого вала й зазначеного принаймні одного контрольованого вала, причому зазначений контрольний пристрій містить контролер і пристрій аварійної сигналізації, причому зазначений контрольний пристрій, виконаний з можливістю виконувати програмні команди для виявлення критичного зниження частоти обертання кожного контрольованого вала, включаючи: (a) визначення фактичної частоти обертання зазначеного колінчастого вала; (b) визначення фактичної частоти обертання першого контрольованого вала; (c) визначення фільтрованої частоти обертання зазначеного першого контрольованого вала на основі алгоритму, в якому використовуються зазначена фактична частота обертання зазначеного першого контрольованого вала, зазначена фактична частота обертання зазначеного колінчастого вала й контрольна частота обертання зазначеного колінчастого вала; (d) порівняння зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала із зазначеною фактичною частотою обертання зазначеного першого контрольованого вала; (е) визначення, чи відхиляється зазначена фактична частота обертання зазначеного першого контрольованого вала від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на задану величину; й (f) видача аварійного сигналу, якщо зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину. 10. Робоча машина за п. 9, яка відрізняється тим, що зазначений контрольний пристрій виконаний з можливістю здійснювати стадії (а)-(е) упродовж заданого часу, і, якщо наприкінці зазначеного заданого часу зазначена фактична частота обертання зазначеного першого контрольованого вала відхиляється від зазначеної фільтрованої частоти обертання зазначеного першого контрольованого вала на зазначену задану величину, видається зазначений аварійний сигнал. 6 UA 102218 C2 11. Робоча машина за п. 10, яка відрізняється тим, що зазначений контрольний пристрій виконаний з можливістю здійснювати стадії (а)-(е) для кожного вала з кількох контрольованих валів. 7 UA 102218 C2 8 UA 102218 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining crititical reduction in rotation frequency of a shaft in a working machine and the working machine
Автори англійськоюCHERVENKA,Kirk J., SENNEFF, Aaron M.
Назва патенту російськоюСпособ определения критического снижения частоты вращения вала в рабочей машине и рабочая машина
Автори російськоюЧервенка Кирк Дж., Сеннефф Аарон М.
МПК / Мітки
МПК: A01D 41/127, A01D 75/02, F16H 59/00
Мітки: спосіб, вала, зниження, частоти, обертання, робочий, робоча, машина, критичного, визначення, машини
Код посилання
<a href="https://ua.patents.su/11-102218-sposib-viznachennya-kritichnogo-znizhennya-chastoti-obertannya-vala-u-robochijj-mashini-ta-robocha-mashina.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення критичного зниження частоти обертання вала у робочій машині та робоча машина</a>
Робоча машина та конструкція підвіски для задніх самоустановлюваних коліс на робочій машині
Номер патенту: 98769
Опубліковано: 25.06.2012
Автори: Бебернес Томас Даріл, Слоун Чарльз Скотт, Розенбалм Аллан Уеслі
МПК: A01D 37/00, B60G 11/00
Мітки: коліс, машина, робоча, підвіски, робочий, самоустановлюваних, конструкція, машини, задніх
Формула / Реферат:
1. Робоча машина, яка містить:раму; принаймні одне ведуче колесо, що переноситься зазначеною рамою; принаймні одну задню вісь, жорстко встановлену на зазначеній рамі нерухомо відносно неї, і принаймні один вузол самоустановлюваного колеса, причому кожен зазначений вузол самоустановлюваного колеса містить вал, важіль колеса, підвіску і самоустановлюване колесо, зазначений вал із можливістю обертання з'єднаний із зовнішнім кінцем...
Обмежувач максимальної частоти обертання колінчастого вала двигуна внутрішнього згоряння
Номер патенту: 36932
Опубліковано: 10.11.2008
Автори: Топчій Сергій Іванович, Нємчик Сергій Михайлович, Філіппов Анатолій Захарович
МПК: F02B 29/00
Мітки: частоти, обмежувач, двигуна, максимально, згоряння, вала, колінчастого, обертання, внутрішнього
Формула / Реферат:
Обмежувач максимальної частоти обертання колінчастого вала двигуна внутрішнього згоряння, що містить повітряну заслінку, встановлену на осі з важелем у впускному трубопроводі двигуна, який відрізняється тим, що до важеля приєднано шток пневмоциліндра, повітря до якого надходить від пневмосистеми через датчик-розподільник, з'єднаний з пневмосистемою, пневмоциліндром і вакуумним трубопроводом впускного трубопроводу, а сам датчик-розподільник...
Спосіб визначення окремих значень амплітудно-фазової частотної характеристики всережимного відцентрового регулятора частоти обертання колінчатого вала тракторного дизельного двигуна
Номер патенту: 33
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/08
Мітки: двигуна, амплітудно-фазової, частоти, визначення, колінчатого, регулятора, характеристики, дизельного, обертання, вала, окремих, спосіб, відцентрового, значень, всережимного, тракторного, частотної
Формула / Реферат:
Формула изобретенияСпособ определения частных значений амплитудно-фазовой частотной характеристики всережимного центробежного регулятора частоты вращения коленчатого вала тракторного дизельного двигателя, характеризующийся тем, что задают частоту вращения валика регулятора, соединяют рычаг управления регулятора с имитатором гармонических колебаний и регистрируют колебания рычага управления и позирующего органа топливного насоса,...
Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем
Номер патенту: 9733
Опубліковано: 17.10.2005
Автори: Васілевський Олександр Миколайович, Поджаренко Володимир Олександрович
МПК: G01P 15/09
Мітки: систем, електромеханічних, вимірювання, пристрій, діагностування, вала, частоти, обертання
Формула / Реферат:
Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем, який складається із блока утворення взаємокореляційної функції та визначення часу затримки між виміряними сигналами, блока обчислення частоти обертання вала, які з'єднано між собою, який відрізняється тим, що в нього введено два п'єзоелектричних акселерометри, осі яких розміщені під прямим кутом один відносно одного, два підсилювачі заряду, два...
Регулятор частоти обертання колінчатого вала

Номер патенту: 50051
Опубліковано: 15.10.2002
Автори: Чекменьов Василь Васильович, Водяник Іван Іванович
МПК: F02D 1/04
Мітки: обертання, частоти, регулятор, вала, колінчатого
Формула / Реферат:
1. Регулятор частоти обертання колінчатого вала, який відрізняється тим, що з метою забезпечення можливості зміни крайнього положення рейки паливного насоса, яке відповідає максимальній цикловій подачі палива, застосована складена тяга рейки, яка складається з двох частин з'єднаних циліндричним шарніром.2. Пристрій за п. 1, який відрізняється тим, що з метою безступінчатого регулювання ходу рейки застосований внутрішній важіль з...
Попередній патент: Композитний матеріал з високою міцністю зчеплення, спосіб одержання та застосування, зокрема в цигаркових фільтрах
Наступний патент: Заміщені піразолохіназолінові похідні, спосіб їх одержання і їх застосування як інгібіторів кінази
Випадковий патент: Барабанний млин для подрібнення рослинної сировини