Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем
Номер патенту: 9733
Опубліковано: 17.10.2005
Автори: Поджаренко Володимир Олександрович, Васілевський Олександр Миколайович
Формула / Реферат
Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем, який складається із блока утворення взаємокореляційної функції та визначення часу затримки між виміряними сигналами, блока обчислення частоти обертання вала, які з'єднано між собою, який відрізняється тим, що в нього введено два п'єзоелектричних акселерометри, осі яких розміщені під прямим кутом один відносно одного, два підсилювачі заряду, два полосових фільтри, причому виходи п'єзоелектричних акселерометрів з'єднано з входами підсилювачів заряду, які з'єднано із відповідними полосовими фільтрами, виходи яких з'єднано із блоком утворення взаємокореляційної та визначення часу затримки між виміряними сигналами.
Текст
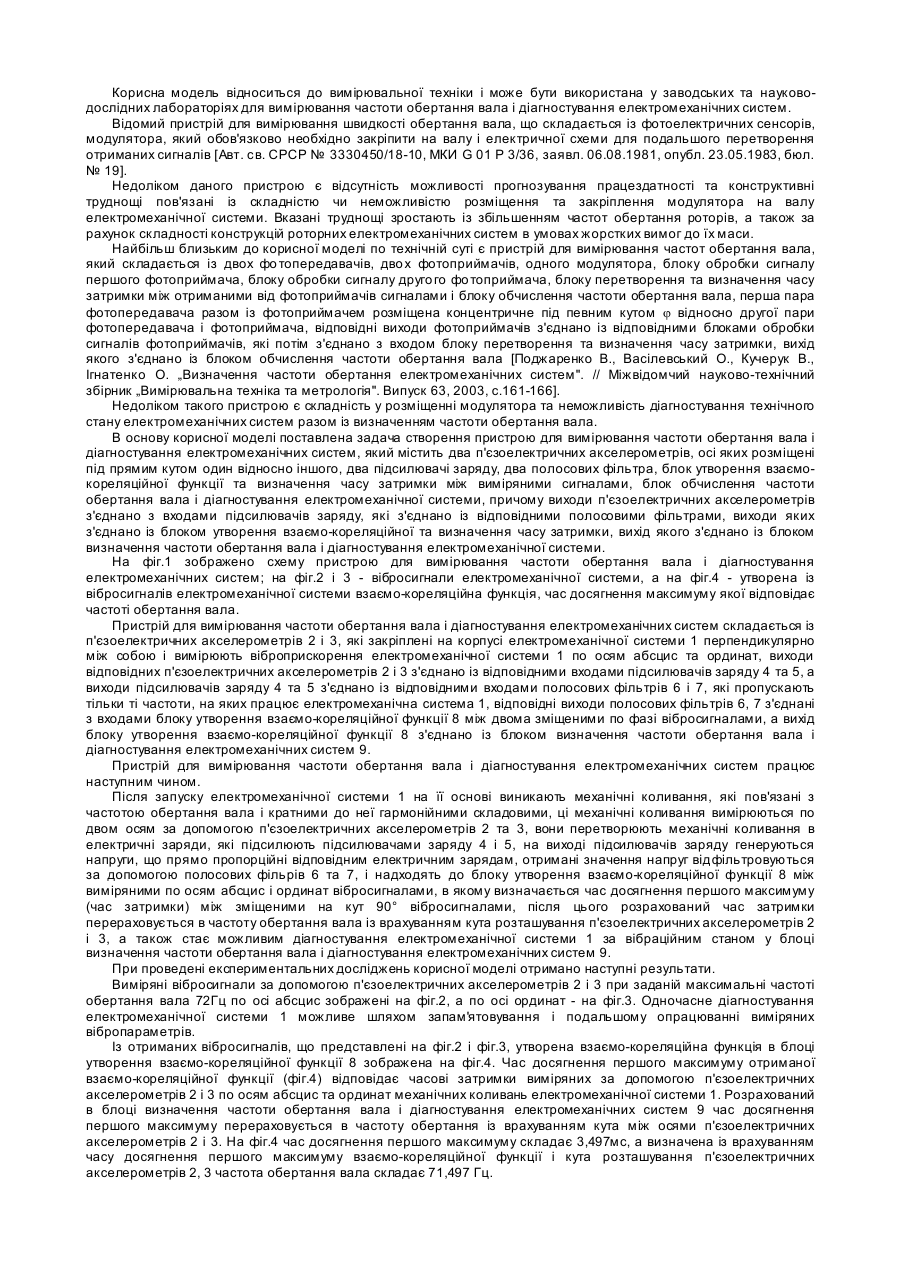
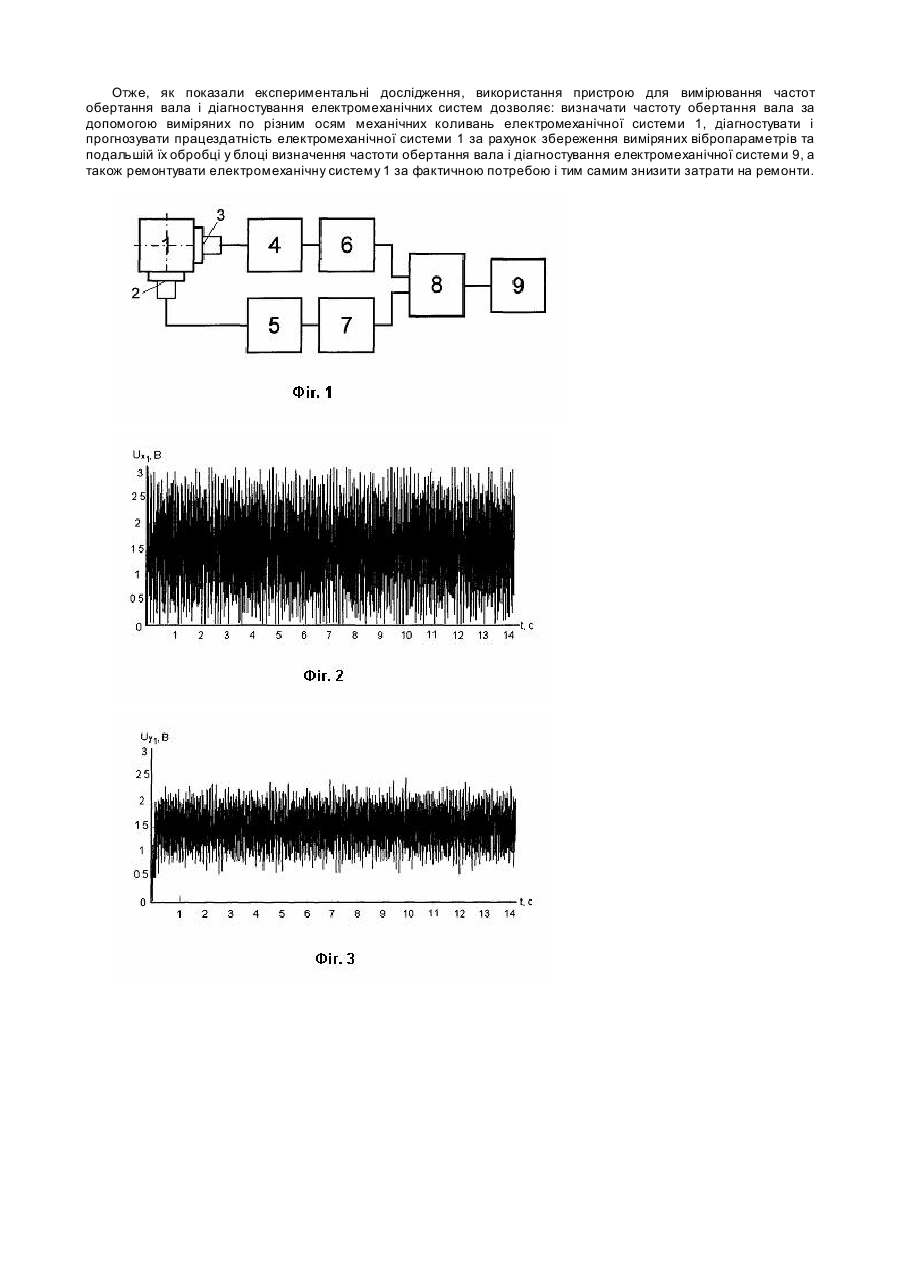
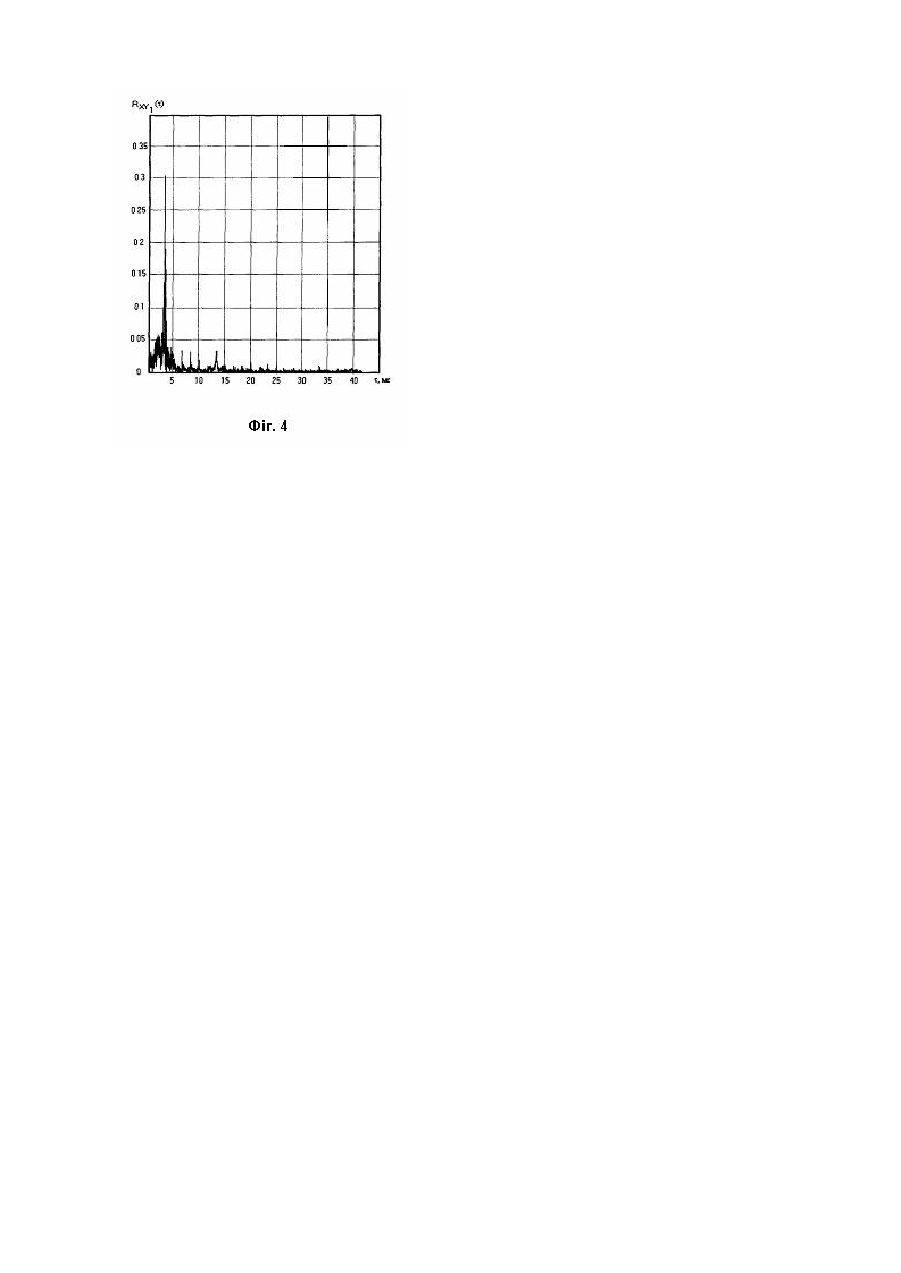
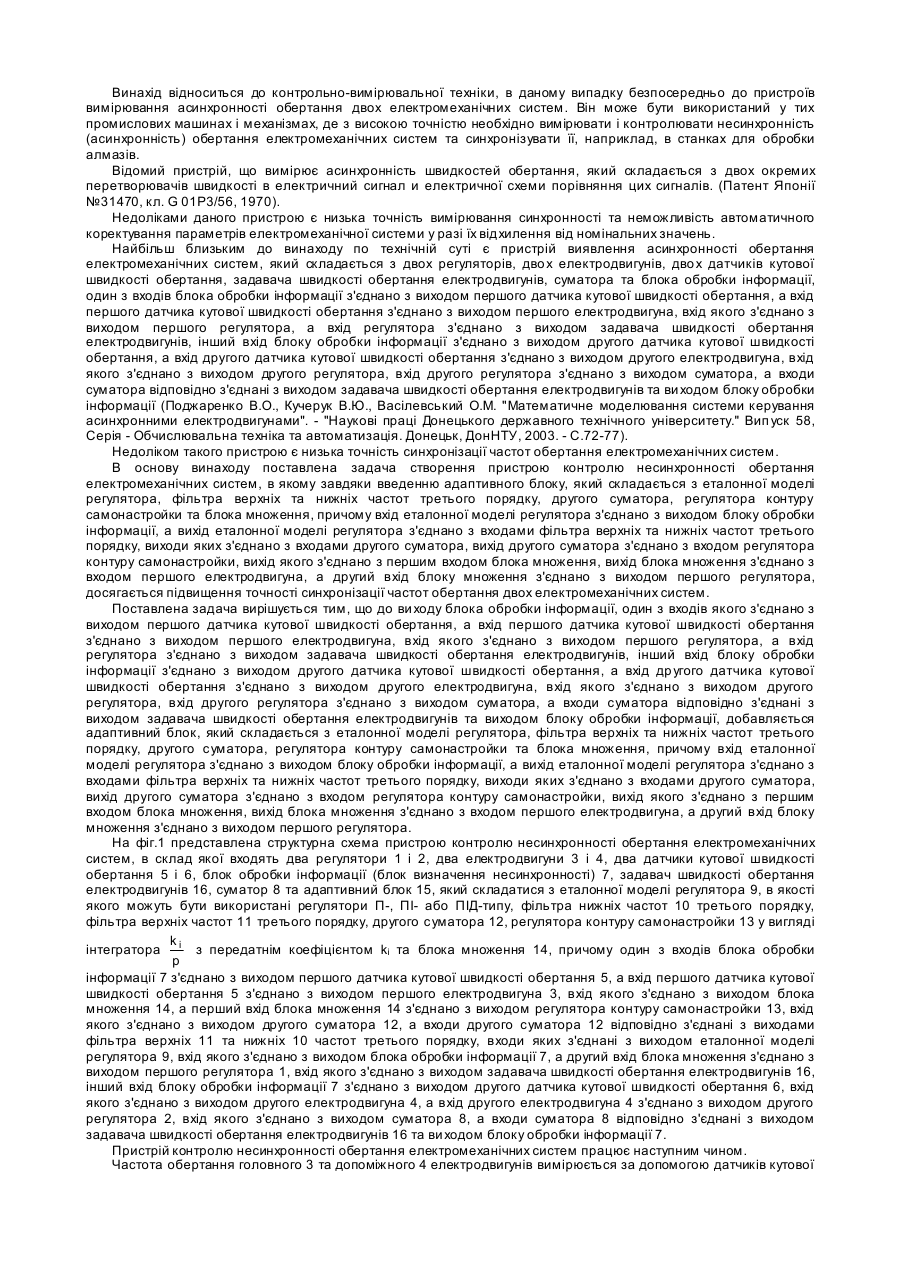
Корисна модель відноситься до вимірювальної техніки і може бути використана у заводських та науководослідних лабораторіях для вимірювання частоти обертання вала і діагностування електромеханічних систем. Відомий пристрій для вимірювання швидкості обертання вала, що складається із фотоелектричних сенсорів, модулятора, який обов'язково необхідно закріпити на валу і електричної схеми для подальшого перетворення отриманих сигналів [Авт. св. СРСР № 3330450/18-10, МКИ G 01 Р 3/36, заявл. 06.08.1981, опубл. 23.05.1983, бюл. № 19]. Недоліком даного пристрою є відсутність можливості прогнозування працездатності та конструктивні труднощі пов'язані із складністю чи неможливістю розміщення та закріплення модулятора на валу електромеханічної системи. Вказані труднощі зростають із збільшенням частот обертання роторів, а також за рахунок складності конструкцій роторних електромеханічних систем в умовах жорстких вимог до їх маси. Найбільш близьким до корисної моделі по технічній суті є пристрій для вимірювання частот обертання вала, який складається із двох фо топередавачів, дво х фотоприймачів, одного модулятора, блоку обробки сигналу першого фотоприймача, блоку обробки сигналу друго го фо топриймача, блоку перетворення та визначення часу затримки між отриманими від фотоприймачів сигналами і блоку обчислення частоти обертання вала, перша пара фотопередавача разом із фотоприймачем розміщена концентричне під певним кутом j відносно другої пари фотопередавача і фотоприймача, відповідні виходи фотоприймачів з'єднано із відповідними блоками обробки сигналів фотоприймачів, які потім з'єднано з входом блоку перетворення та визначення часу затримки, вихід якого з'єднано із блоком обчислення частоти обертання вала [Поджаренко В., Васілевський О., Кучерук В., Ігнатенко О. „Визначення частоти обертання електромеханічних систем". // Міжвідомчий науково-технічний збірник „Вимірювальна техніка та метрологія". Випуск 63, 2003, с.161-166]. Недоліком такого пристрою є складність у розміщенні модулятора та неможливість діагностування технічного стану електромеханічних систем разом із визначенням частоти обертання вала. В основу корисної моделі поставлена задача створення пристрою для вимірювання частоти обертання вала і діагностування електромеханічних систем, який містить два п'єзоелектричних акселерометрів, осі яких розміщені під прямим кутом один відносно іншого, два підсилювачі заряду, два полосових фільтра, блок утворення взаємокореляційної функції та визначення часу затримки між виміряними сигналами, блок обчислення частоти обертання вала і діагностування електромеханічної системи, причому виходи п'єзоелектричних акселерометрів з'єднано з входами підсилювачів заряду, які з'єднано із відповідними полосовими фільтрами, виходи яких з'єднано із блоком утворення взаємо-кореляційної та визначення часу затримки, вихід якого з'єднано із блоком визначення частоти обертання вала і діагностування електромеханічної системи. На фіг.1 зображено схему пристрою для вимірювання частоти обертання вала і діагностування електромеханічних систем; на фіг.2 і 3 - вібросигнали електромеханічної системи, а на фіг.4 - утворена із вібросигналів електромеханічної системи взаємо-кореляційна функція, час досягнення максимуму якої відповідає частоті обертання вала. Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем складається із п'єзоелектричних акселерометрів 2 і 3, які закріплені на корпусі електромеханічної системи 1 перпендикулярно між собою і вимірюють віброприскорення електромеханічної системи 1 по осям абсцис та ординат, виходи відповідних п'єзоелектричних акселерометрів 2 і 3 з'єднано із відповідними входами підсилювачів заряду 4 та 5, а виходи підсилювачів заряду 4 та 5 з'єднано із відповідними входами полосових фільтрів 6 і 7, які пропускають тільки ті частоти, на яких працює електромеханічна система 1, відповідні виходи полосових фільтрів 6, 7 з'єднані з входами блоку утворення взаємо-кореляційної функції 8 між двома зміщеними по фазі вібросигналами, а вихід блоку утворення взаємо-кореляційної функції 8 з'єднано із блоком визначення частоти обертання вала і діагностування електромеханічних систем 9. Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем працює наступним чином. Після запуску електромеханічної системи 1 на її основі виникають механічні коливання, які пов'язані з частотою обертання вала і кратними до неї гармонійними складовими, ці механічні коливання вимірюються по двом осям за допомогою п'єзоелектричних акселерометрів 2 та 3, вони перетворюють механічні коливання в електричні заряди, які підсилюють підсилювачами заряду 4 і 5, на виході підсилювачів заряду генеруються напруги, що прямо пропорційні відповідним електричним зарядам, отримані значення напруг відфільтровуються за допомогою полосових фільрів 6 та 7, і надходять до блоку утворення взаємо-кореляційної функції 8 між виміряними по осям абсцис і ординат вібросигналами, в якому визначається час досягнення першого максимуму (час затримки) між зміщеними на кут 90° вібросигналами, після цього розрахований час затримки перераховується в частоту обертання вала із врахуванням кута розташування п'єзоелектричних акселерометрів 2 і 3, а також стає можливим діагностування електромеханічної системи 1 за вібраційним станом у блоці визначення частоти обертання вала і діагностування електромеханічних систем 9. При проведені експериментальних досліджень корисної моделі отримано наступні результати. Виміряні вібросигнали за допомогою п'єзоелектричних акселерометрів 2 і 3 при заданій максимальні частоті обертання вала 72Гц по осі абсцис зображені на фіг.2, a по осі ординат - на фіг.3. Одночасне діагностування електромеханічної системи 1 можливе шляхом запам'ятовування і подальшому опрацюванні виміряних вібропараметрів. Із отриманих вібросигналів, що представлені на фіг.2 і фіг.3, утворена взаємо-кореляційна функція в блоці утворення взаємо-кореляційної функції 8 зображена на фіг.4. Час досягнення першого максимуму отриманої взаємо-кореляційної функції (фіг.4) відповідає часові затримки виміряних за допомогою п'єзоелектричних акселерометрів 2 і 3 по осям абсцис та ординат механічних коливань електромеханічної системи 1. Розрахований в блоці визначення частоти обертання вала і діагностування електромеханічних систем 9 час досягнення першого максимуму перераховується в частоту обертання із врахуванням кута між осями п'єзоелектричних акселерометрів 2 і 3. На фіг.4 час досягнення першого максимуму складає 3,497мс, а визначена із врахуванням часу досягнення першого максимуму взаємо-кореляційної функції і кута розташування п'єзоелектричних акселерометрів 2, 3 частота обертання вала складає 71,497 Гц. Отже, як показали експериментальні дослідження, використання пристрою для вимірювання частот обертання вала і діагностування електромеханічних систем дозволяє: визначати частоту обертання вала за допомогою виміряних по різним осям механічних коливань електромеханічної системи 1, діагностувати і прогнозувати працездатність електромеханічної системи 1 за рахунок збереження виміряних вібропараметрів та подальшій їх обробці у блоці визначення частоти обертання вала і діагностування електромеханічної системи 9, а також ремонтувати електромеханічну систему 1 за фактичною потребою і тим самим знизити затрати на ремонти.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring shaft frequency rotation and for diagnostics of electromechanical systems
Автори англійськоюVasylevskyi Oleksandr Mykolaiovych, Podzharenko Volodymyr Oleksandrovych
Назва патенту російськоюУстройство для измерения частоты вращения вала и диагностики электромеханических систем
Автори російськоюВасилевський Александр Николаевич, Поджаренко Владимир Александрович
МПК / Мітки
МПК: G01P 15/09
Мітки: систем, діагностування, пристрій, частоти, електромеханічних, вимірювання, вала, обертання
Код посилання
<a href="https://ua.patents.su/3-9733-pristrijj-dlya-vimiryuvannya-chastoti-obertannya-vala-i-diagnostuvannya-elektromekhanichnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем</a>
Пристрій контролю несинхронності обертання електромеханічних систем
Номер патенту: 67650
Опубліковано: 15.06.2004
Автори: Поджаренко Володимир Олександрович, Васілевський Олександр Миколайович, Кучерук Володимир Юрійович, Кабанова Олена В'ячеславівна
МПК: G01P 3/02
Мітки: несинхронності, систем, обертання, електромеханічних, пристрій, контролю
Формула / Реферат:
Пристрій контролю несинхронності обертання електромеханічних систем, який складається з двох регуляторів, двох електродвигунів, двох датчиків кутової швидкості обертання, задавача швидкості обертання електродвигунів, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості обертання, а вхід першого датчика кутової швидкості обертання з'єднано з виходом першого електродвигуна, вхід якого...
Пристрій для автоматичного регулювання частоти обертання колінчастого вала двигуна внутрішнього згоряння
Номер патенту: 1486
Опубліковано: 15.11.2002
Автори: ЧЕРНІГОВ ВІКТОР ЛЕОНІДОВИЧ, Будьонний Михайло Михайлович, Тернопол Володимир Петрович, Рузов Вадим Олександрович, ЗАЙОНЧКОВСЬКИЙ ВАЛЕНТИН МИКОЛАЙОВИЧ, Тараканов Станіслав Іванович, ДОРОШ СЕРГІЙ ІВАНОВИЧ, Макаров Василь Миколайович
МПК: F02D 41/00, F02D 31/00
Мітки: автоматичного, регулювання, внутрішнього, двигуна, вала, пристрій, згоряння, частоти, колінчастого, обертання
Формула / Реферат:
Пристрій для автоматичного регулювання частоти обертання колінчастого вала двигуна внутрішнього згоряння, що містить мікропроцесорний і гідромеханічний блоки управління, автономну масляну систему регулятора, силовий сервомотор, механізм управління силовим сервомотором і стоп-пристрій, який відрізняється тим, що механізм управління силовим сервомотором включає в себе актюатор, золотник і систему гідравлічних каналів, безпосередньо зв'язаних з...
Регулятор частоти обертання колінчатого вала

Номер патенту: 50051
Опубліковано: 15.10.2002
Автори: Водяник Іван Іванович, Чекменьов Василь Васильович
МПК: F02D 1/04
Мітки: обертання, вала, регулятор, колінчатого, частоти
Формула / Реферат:
1. Регулятор частоти обертання колінчатого вала, який відрізняється тим, що з метою забезпечення можливості зміни крайнього положення рейки паливного насоса, яке відповідає максимальній цикловій подачі палива, застосована складена тяга рейки, яка складається з двох частин з'єднаних циліндричним шарніром.2. Пристрій за п. 1, який відрізняється тим, що з метою безступінчатого регулювання ходу рейки застосований внутрішній важіль з...
Пристрій для вимірювання швидкості обертання вала
Номер патенту: 48585
Опубліковано: 15.08.2002
Автори: Наконечний Микола Петрович, Іванченко Олександр Васильович
Мітки: вимірювання, швидкості, вала, пристрій, обертання
Формула / Реферат:
Пристрій для вимірювання швидкості обертання вала, що містить закріплені на валу модулятор з отворами, два фотоприймачі, два генератори струму, які живлять два джерела світла, причому перший фотоприймач встановлений навпроти першого джерела світла і отвору модулятора, а другий - навпроти другого джерела світла і перемички між отворами модулятора, який відрізняється тим, що ширина перемички більш ніж у два рази перевищує ширину отвору...
Пристрій для безперервного діагностування технічного стану нерознімних і рознімних з’єднань елементів тіл обертання
Номер патенту: 53033
Опубліковано: 15.01.2003
Автори: Осенін Юрій Іванович, Марченко Дмитро Миколайович, Голубенко Олександр Леонідович, Богданов Олексій Вікторович
МПК: G08B 23/00
Мітки: технічного, з'єднань, елементів, діагностування, пристрій, обертання, нерознімних, безперервного, тіл, рознімних, стану
Формула / Реферат:
Пристрій для безперервного діагностування технічного стану нерознімних і рознімних з'єднань елементів тіл обертання, що містить датчики для реєстрації порушення технічного стану, передавачі і приймачі сигналів, а також блок управління та контролю, який відрізняється тим, що датчики виконано у вигляді струмопровідного дроту, виготовленого з крихкого матеріалу в крихкій ізоляційній оболонці і прикріпленого до з'єднання, що діагностується, таким...
Попередній патент: Мікроелементна домішка “феруміт”
Наступний патент: Крокуючий конвейєр
Випадковий патент: Спосіб отримання дизельного біопалива з рицинової олії