Пристрій електромеханічного приводу аеродинамічної поверхні літака
Номер патенту: 103549
Опубліковано: 25.10.2013
Автори: Урсу Валєнтін Євгєньєвіч, Алєксашін Анатолій Алєксєєвіч, Нєстєров Віктор Антоновіч
Формула / Реферат
1. Пристрій електромеханічного приводу аеродинамічної поверхні літака, що має керовану аеродинамічну поверхню, приєднаний до нерухомої відносно фюзеляжу аеродинамічної поверхні з можливістю обертання; перший і другий електромеханічні приводи, встановлені співвісно між нерухомою відносно фюзеляжу і керованою аеродинамічною поверхнею, кожний з яких складається з корпуса з розміщеним усередині електродвигуном і розташованого співвісно електродвигуну редуктора з вихідною обертовою ланкою, з'єднаною з керованою аеродинамічною поверхнею; засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні для забезпечення обертання керованої аеродинамічної поверхні, який відрізняється тим, що кожний електромеханічний привід має нерухомий корпус, закріплений на нерухомій відносно фюзеляжу аеродинамічній поверхні, редуктором в електромеханічному приводі є двоступенева хвильова передача, обертова ланка якої виконана у вигляді вихідного порожнистого вала із фланцем, закріпленим на керованій аеродинамічній поверхні таким чином, що вісь обертання керованої аеродинамічної поверхні сполучена з осями обертання першого і другого електромеханічного приводу, а засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні розміщені вісесиметрично у вихідному порожнистому валу електромеханічного приводу.
2. Пристрій за п. 1, який відрізняється тим, що електромеханічний привід складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною і торцевими частинами, закріплюваного нерухомо на нерухомій відносно фюзеляжу аеродинамічній поверхні, електродвигуна, що має статор і закріплений на валу ротор, розташовані всередині другого ступеня; двоступеневої хвильової передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол з ексцентрично розташованими поверхнями; сепаратора першого ступеня хвильової передачі з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними встановленими на ексцентрично розташованих поверхнях робочими дисками відносно хвилеутворювача у жорсткому колесі першого ступеня, що має на зовнішній частині ексцентрично розташовані поверхні для другого ступеня; сепаратор другого ступеня з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними кільцями, встановленими на ексцентрично розташованих на жорсткому колесі поверхнях, відносно другого хвилеутворювача на внутрішній поверхні циліндричної частини корпуса; вихідного вала, що спирається на тіла кочення і підшипники кочення, який має шліци на внутрішній поверхні, а також продовження у вигляді порожнистої маточини із закріпленим на ній фланцем, з'єднаним з привідним об'єктом; на частині внутрішньої поверхні маточини є шліцева поверхня, що збігається з внутрішньою шліцевою поверхнею вихідного вала; всередині шліцевого вала і частини маточини встановлений шліцевий стакан, усередині якого є спіраль, що зминається, приєднана до дна стакана; всередині маточини встановлений пристрій виштовхування шліцевого стакана зі шліцевої частини маточини; вузлів, що забезпечують керування роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів і обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм і електродвигуном датчика положення ротора електродвигуна, з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом.
3. Пристрій за п. 1, який відрізняється тим, що пристрій виштовхування шліцевого стакана зі шліцевої частини маточини має піропатрон з піротехнічним зарядом і електричним ініціатором горіння піротехнічного заряду.
Текст
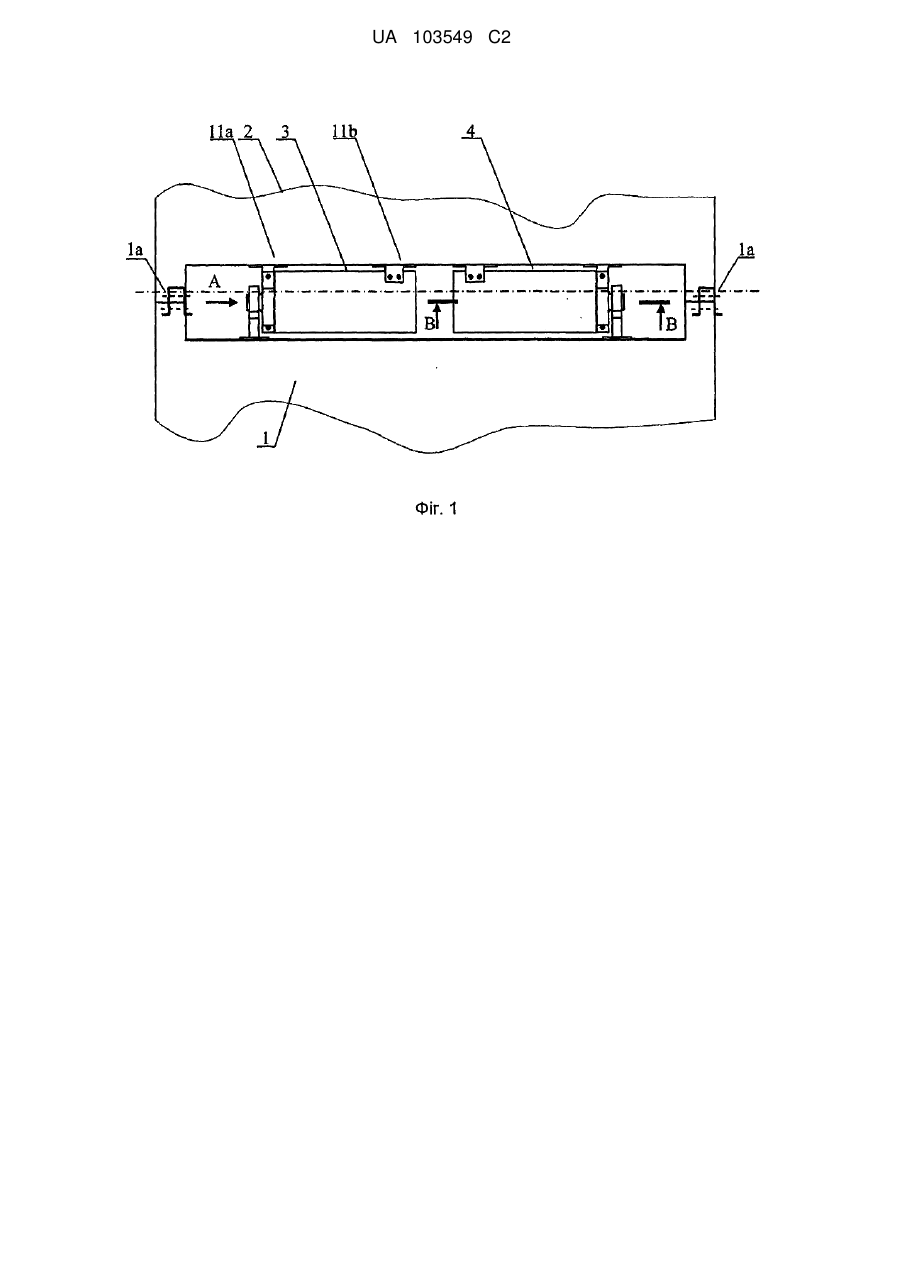
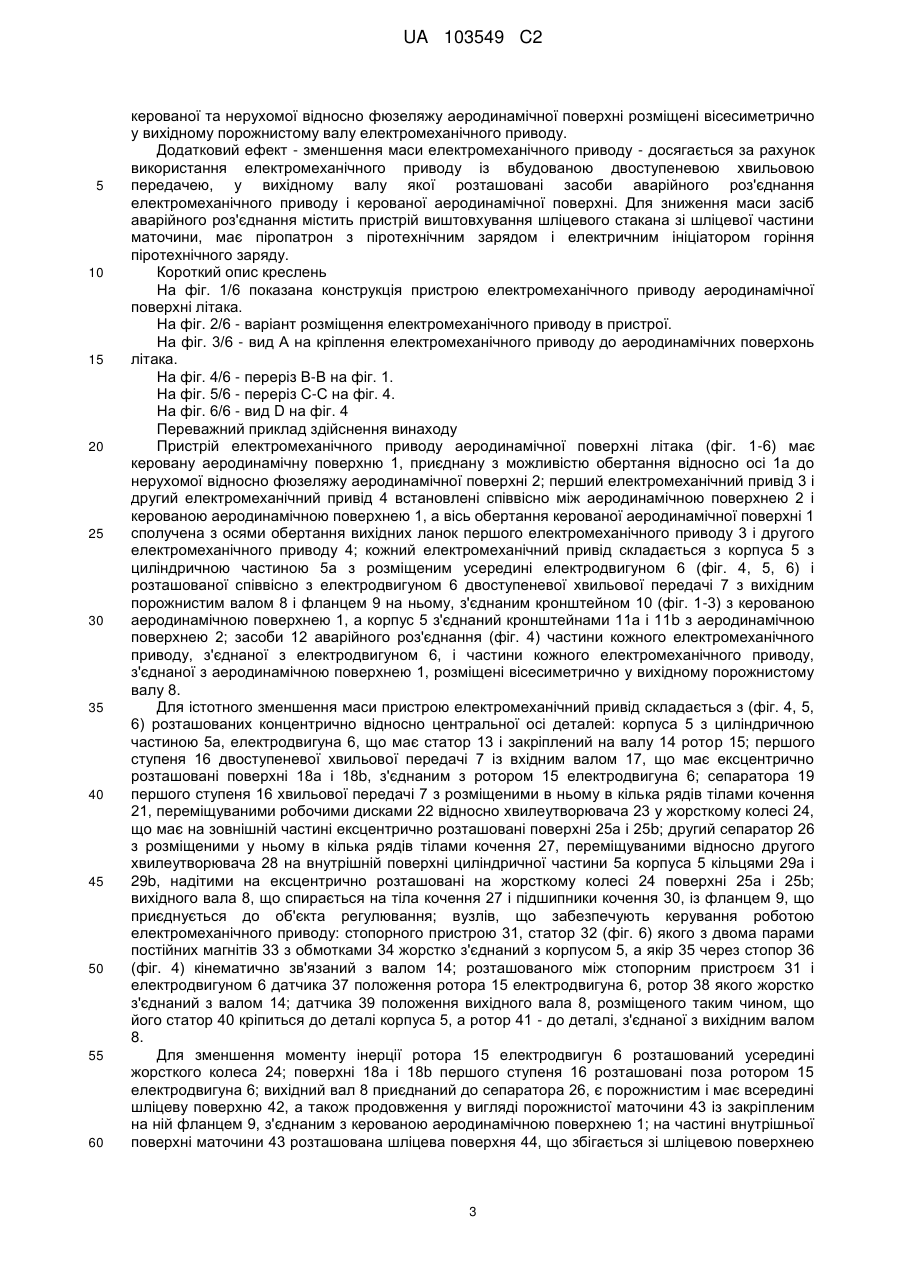
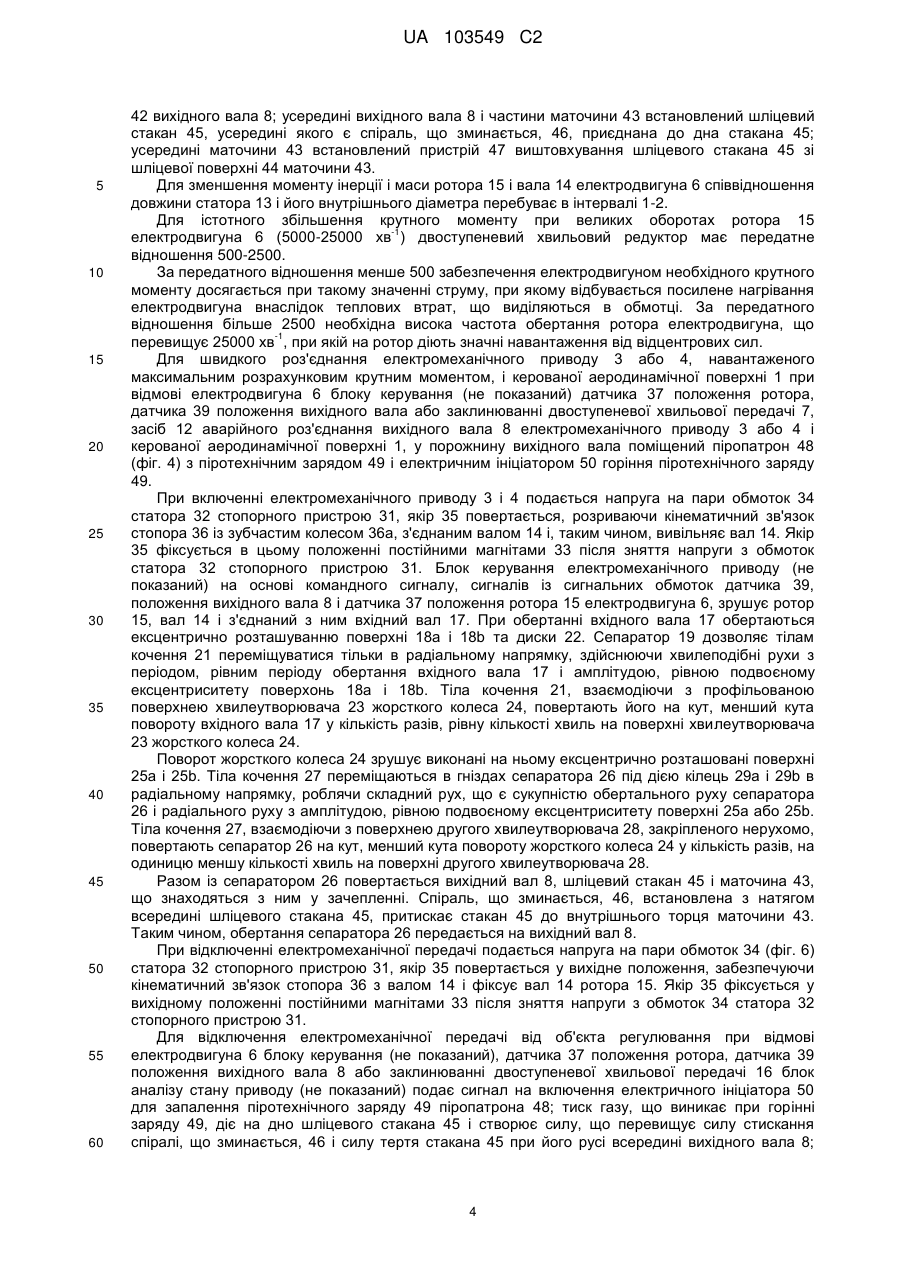
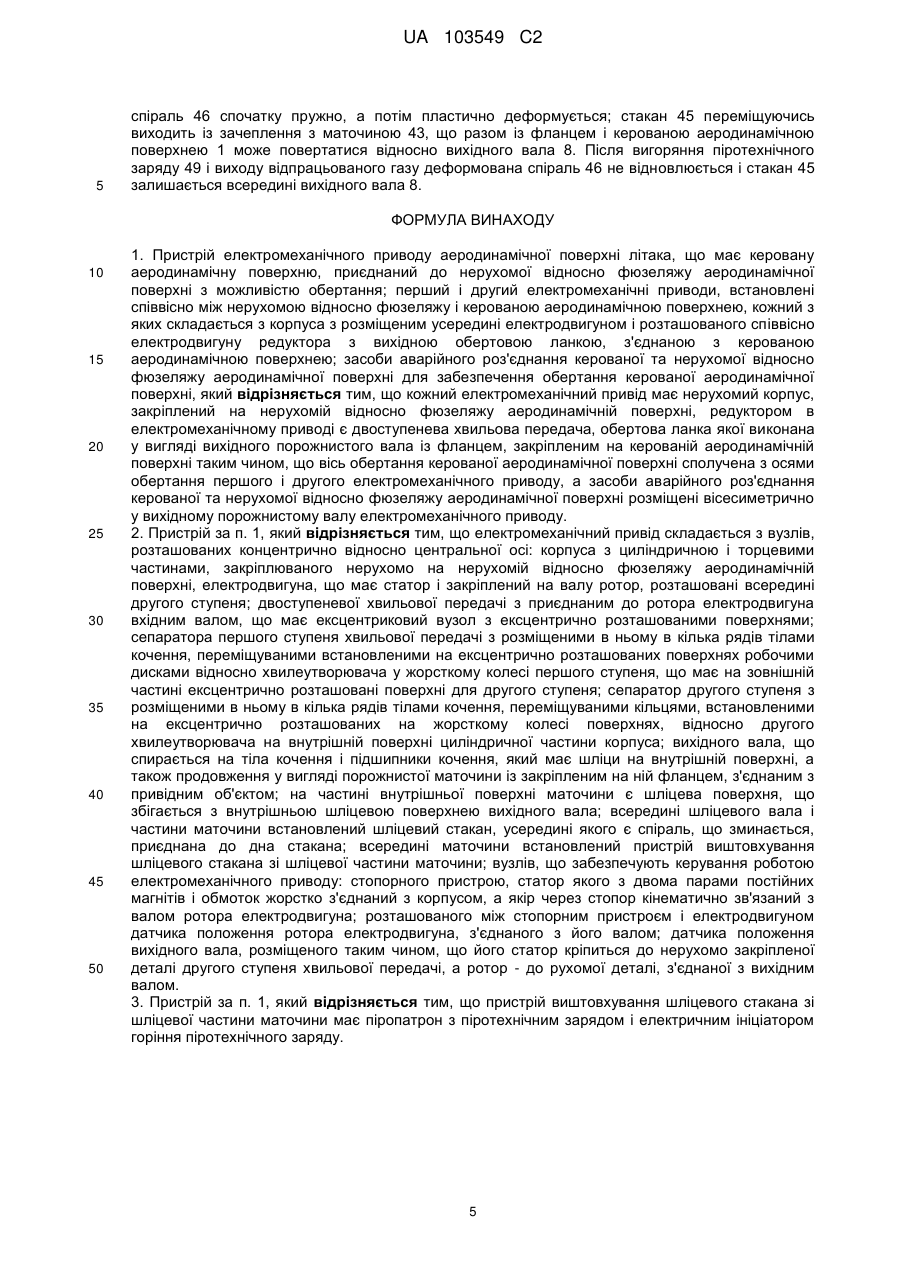
Реферат: Запропоновано пристрій електромеханічного приводу аеродинамічної поверхні літака, що має керовану аеродинамічну поверхню, приєднану до нерухомої відносно фюзеляжу аеродинамічної поверхні з можливістю обертання; перший та другий електромеханічні приводи, встановлені співвісно між нерухомою відносно фюзеляжу та керованою аеродинамічною поверхнею, кожний з яких складається з корпуса з розміщеним всередині електродвигуном та розташованого співвісно електродвигуну редуктора з вихідною обертовою ланкою, з'єднаною з керованою аеродинамічною поверхнею; засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні для забезпечення обертання керованої аеродинамічної поверхні. При цьому кожний електромагнітний привід має нерухомий корпус, закріплений на нерухомій відносно фюзеляжу аеродинамічній поверхні, редуктором в електромеханічному приводі є двоступенева хвильова передача, обертова ланка якої виконана у вигляді порожнистого вала із фланцем, закріпленим на керованій аеродинамічній поверхні таким чином, що вісь обертання керованої аеродинамічної поверхні суміщена з осями обертання першого та другого електромеханічного приводу, а засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні розміщені вісесиметрично у вихідному порожнистому валу електромеханічного приводу, та містить піропатрон. UA 103549 C2 (12) UA 103549 C2 UA 103549 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь техніки Винахід належить до систем управління аеродинамічних поверхонь (стерна напряму, елерона та ін.) літаків. Попередній рівень техніки Відомі винаходи, що належать до систем управління літаків (патенти US № 6827311 від 07.04.2003, US № 7007897 від 22.06.2004, ЕР № 1964771 від 26.02.2008). Система управління кожним аеродинамічним елементом включає гідравлічний (чи пневматичний) та електромеханічний привід. Недолік такої системи управління - використання на літаку для управління аеродинамічною поверхнею як мінімум двох систем генерування і розподілу енергії електричної та гідравлічної або пневматичної систем, оснащених аналогічними за функціональним призначенням пристроями. Відомий винахід системи електромеханічного приводу керованої аеродинамічної поверхні літака (патент US № 4575027 від 16.05.1983) (прототип), що включає керовану аеродинамічну поверхню, приєднану до нерухомої відносно фюзеляжу аеродинамічної поверхні з можливістю обертання; перший і другий електромеханічний привід, встановлені співвісно між нерухомою відносно фюзеляжу і керованою аеродинамічною поверхнею, кожний з яких складається з корпуса з розміщеним усередині електродвигуном і розташованого співвісно електродвигуну редуктора з вихідною обертовою ланкою, з'єднаною з керованою аеродинамічною поверхнею; засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічних поверхонь для забезпечення обертання керованої аеродинамічної поверхні. Недолік відомої системи електромеханічного приводу в її великих габаритах і масі та складній конструкції з'єднання електромеханічного приводу з аеродинамічною поверхнею. Відомий силовий мініпривід (патент RU № 2321138 від 10.01.2007; заявка WO № 2008/085082 А1 від 12.07.2007), що складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною та торцевими частинами, електродвигуна, що має статор і закріплений на валу ротор; двоступеневої хвильової передачі з вхідним валом, що має ексцентрично розташовані поверхні, з'єднаним з ротором електродвигуна; сепаратора першого ступеня хвильової передачі з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними робочими дисками відносно хвилеутворювача у жорсткому колесі, що має на зовнішній частині ексцентрично розташовані поверхні; другий сепаратор з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними кільцями, надітими на ексцентрично розташовані на жорсткому колесі поверхні, відносно другого хвилеутворювача, що розташований на внутрішній поверхні циліндричної частини корпуса електромеханічної передачі; вихідного вала, що спирається на тіла кочення і підшипники кочення; вузлів, що забезпечують управління роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів і обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм і електродвигуном датчика положення ротора електродвигуна, жорстко з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом. Недолік силового мініприводу у великій інерційності порожнистого ротора великого діаметра, всередині якого розміщений ексцентриковий вузол, частина сепаратора і частина жорсткого колеса першого ступеня хвильового редуктора. Цей недолік обмежує величину прискорення ротора за припустимих втрат у двигуні (втрат у міді) і не дозволяє забезпечити підвищену керованість об'єктів, що приводяться електромеханічним приводом. Крім того, силовий мініпривід не має аварійного роз'єднувача вихідного вала й об'єкта, що ним приводиться. Відомий піропатрон системи катапультування, використовуваної в авіаційній техніці (патент RU № 2230211 від 14.10.2002), що має корпус із твердопаливними шашками, петарду з пресованого пороху, капсуль-запальник. У винаході пристрою (патент RU № 2116094 від 11.02.1997) автоматичного включення установки для запалення піропатрона використовується вузол електричного пуску, що працює від електричних сигналів датчиків або від дистанційного керування. Розкриття винаходу Технічне завдання, що вирішується винаходом - зниження маси і габаритів пристрою електромеханічного приводу і спрощення конструкції його з'єднання з керованим об'єктом. Технічне завдання вирішене в пристрої електромеханічного приводу аеродинамічної поверхні літака, що має керовану аеродинамічну поверхню, приєднану до нерухомої відносно фюзеляжу аеродинамічної поверхні з можливістю обертання; перший і другий електромеханічні 1 UA 103549 C2 5 10 15 20 25 30 35 40 45 50 55 60 приводи, встановлені співвісно між нерухомою відносно фюзеляжу і керованою аеродинамічними поверхнями, кожний з яких складається з корпуса з розміщеним усередині електродвигуном і розташованого співвісно електродвигуну редуктора з вихідною обертовою ланкою, з'єднаною з керованою аеродинамічною поверхнею; засобу аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні для забезпечення обертання керованої аеродинамічної поверхні, при цьому кожний електромеханічний привід має нерухомий корпус, закріплений на нерухомій відносно фюзеляжу аеродинамічній поверхні, редуктором в електромеханічному приводі є двоступенева хвильова передача, обертова ланка якої у вигляді вихідного порожнистого вала з фланцем закріплена на керованій аеродинамічній поверхні, таким чином вісь обертання керованої аеродинамічної поверхні сполучена з осями обертання першого і другого електромеханічного приводу, а засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні розміщені вісесиметрично у вихідному порожнистому валу електромеханічного приводу. Для зменшення маси електромеханічний привід складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною та торцевими частинами, що нерухомо кріпиться на нерухомій відносно фюзеляжу аеродинамічній поверхні, електродвигуна, що має статор і закріплений на валу ротор, розташовані всередині другого ступеня; двоступеневої хвильової передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол з ексцентрично розташованими поверхнями; сепаратора першого ступеня хвильової передачі з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними встановленими на ексцентрично розташованих поверхнях робочими дисками відносно хвилеутворювача у жорсткому колесі першого ступеня, що має на зовнішній частині ексцентрично розташовані поверхні для другого ступеня; сепаратор другого ступеня з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними кільцями, встановленими на ексцентрично розташованих на жорсткому колесі поверхнях, відносно другого хвилеутворювача на внутрішній поверхні циліндричної частини корпуса; вихідного вала, що спирається на тіла кочення і підшипники кочення, що має шліци на внутрішній поверхні, а також продовження у вигляді порожнистої маточини із закріпленим на ній фланцем, з'єднаним з привідним об'єктом; на частині внутрішньої поверхні маточини наявна шліцева поверхня, що збігається з внутрішньою шліцевою поверхнею вихідного вала; всередині шліцевого вала і частини маточини встановлений шліцевий стакан, усередині якого наявна спіраль, що зминається, приєднана до дна стакана; всередині маточини встановлений пристрій виштовхування шліцевого стакана зі шліцевої частини маточини; вузлів, що забезпечують керування роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів і обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм і електродвигуном датчика положення ротора електродвигуна, з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом. Пристрій виштовхування шліцевого стакана може бути електромагнітним, але для зниження його маси пристрій виштовхування шліцевого стакана зі шліцевої частини маточини має піропатрон з піротехнічним зарядом і електричним ініціатором горіння піротехнічного заряду. Для істотного зменшення моменту інерції ротора при заданому крутному моменті електродвигуна відношення довжини статора до його внутрішнього діаметра перебуває в інтервалі 1-2. Для підвищення рівномірності роботи хвильової передачі кількість ексцентрично розташованих поверхонь є парною, при цьому осі суміжних поверхонь зміщені в протилежні напрямки від центральної осі. Для значного збільшення крутного моменту на вихідному валу електромеханічного приводу -1 при частоті обертання ротора електродвигуна 5000-25000 хв передатне відношення двоступеневої хвильової передачі перебуває в інтервалі 500-2500. Технічний ефект - зниження маси і габаритів пристрою електромеханічного приводу і спрощення конструкції його з'єднання з керованим об'єктом - досягається за рахунок додаткової сукупності ознак пристрою - кожний електромеханічний привід має нерухомий корпус, закріплений на нерухомій відносно фюзеляжу аеродинамічній поверхні; редуктором в електромеханічному приводі є двоступенева хвильова передача, обертова ланка якої виконана у вигляді вихідного порожнистого вала із фланцем, закріпленим на керованій аеродинамічній поверхні таким чином, що вісь обертання керованої аеродинамічної поверхні сполучена з осями обертання першого і другого електромеханічного приводу, а засоби аварійного роз'єднання 2 UA 103549 C2 5 10 15 20 25 30 35 40 45 50 55 60 керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні розміщені вісесиметрично у вихідному порожнистому валу електромеханічного приводу. Додатковий ефект - зменшення маси електромеханічного приводу - досягається за рахунок використання електромеханічного приводу із вбудованою двоступеневою хвильовою передачею, у вихідному валу якої розташовані засоби аварійного роз'єднання електромеханічного приводу і керованої аеродинамічної поверхні. Для зниження маси засіб аварійного роз'єднання містить пристрій виштовхування шліцевого стакана зі шліцевої частини маточини, має піропатрон з піротехнічним зарядом і електричним ініціатором горіння піротехнічного заряду. Короткий опис креслень На фіг. 1/6 показана конструкція пристрою електромеханічного приводу аеродинамічної поверхні літака. На фіг. 2/6 - варіант розміщення електромеханічного приводу в пристрої. На фіг. 3/6 - вид А на кріплення електромеханічного приводу до аеродинамічних поверхонь літака. На фіг. 4/6 - переріз В-В на фіг. 1. На фіг. 5/6 - переріз С-С на фіг. 4. На фіг. 6/6 - вид D на фіг. 4 Переважний приклад здійснення винаходу Пристрій електромеханічного приводу аеродинамічної поверхні літака (фіг. 1-6) має керовану аеродинамічну поверхню 1, приєднану з можливістю обертання відносно осі 1а до нерухомої відносно фюзеляжу аеродинамічної поверхні 2; перший електромеханічний привід 3 і другий електромеханічний привід 4 встановлені співвісно між аеродинамічною поверхнею 2 і керованою аеродинамічною поверхнею 1, а вісь обертання керованої аеродинамічної поверхні 1 сполучена з осями обертання вихідних ланок першого електромеханічного приводу 3 і другого електромеханічного приводу 4; кожний електромеханічний привід складається з корпуса 5 з циліндричною частиною 5а з розміщеним усередині електродвигуном 6 (фіг. 4, 5, 6) і розташованої співвісно з електродвигуном 6 двоступеневої хвильової передачі 7 з вихідним порожнистим валом 8 і фланцем 9 на ньому, з'єднаним кронштейном 10 (фіг. 1-3) з керованою аеродинамічною поверхнею 1, а корпус 5 з'єднаний кронштейнами 11а і 11b з аеродинамічною поверхнею 2; засоби 12 аварійного роз'єднання (фіг. 4) частини кожного електромеханічного приводу, з'єднаної з електродвигуном 6, і частини кожного електромеханічного приводу, з'єднаної з аеродинамічною поверхнею 1, розміщені вісесиметрично у вихідному порожнистому валу 8. Для істотного зменшення маси пристрою електромеханічний привід складається з (фіг. 4, 5, 6) розташованих концентрично відносно центральної осі деталей: корпуса 5 з циліндричною частиною 5а, електродвигуна 6, що має статор 13 і закріплений на валу 14 ротор 15; першого ступеня 16 двоступеневої хвильової передачі 7 із вхідним валом 17, що має ексцентрично розташовані поверхні 18а і 18b, з'єднаним з ротором 15 електродвигуна 6; сепаратора 19 першого ступеня 16 хвильової передачі 7 з розміщеними в ньому в кілька рядів тілами кочення 21, переміщуваними робочими дисками 22 відносно хвилеутворювача 23 у жорсткому колесі 24, що має на зовнішній частині ексцентрично розташовані поверхні 25а і 25b; другий сепаратор 26 з розміщеними у ньому в кілька рядів тілами кочення 27, переміщуваними відносно другого хвилеутворювача 28 на внутрішній поверхні циліндричної частини 5а корпуса 5 кільцями 29а і 29b, надітими на ексцентрично розташовані на жорсткому колесі 24 поверхні 25а і 25b; вихідного вала 8, що спирається на тіла кочення 27 і підшипники кочення 30, із фланцем 9, що приєднується до об'єкта регулювання; вузлів, що забезпечують керування роботою електромеханічного приводу: стопорного пристрою 31, статор 32 (фіг. 6) якого з двома парами постійних магнітів 33 з обмотками 34 жорстко з'єднаний з корпусом 5, а якір 35 через стопор 36 (фіг. 4) кінематично зв'язаний з валом 14; розташованого між стопорним пристроєм 31 і електродвигуном 6 датчика 37 положення ротора 15 електродвигуна 6, ротор 38 якого жорстко з'єднаний з валом 14; датчика 39 положення вихідного вала 8, розміщеного таким чином, що його статор 40 кріпиться до деталі корпуса 5, а ротор 41 - до деталі, з'єднаної з вихідним валом 8. Для зменшення моменту інерції ротора 15 електродвигун 6 розташований усередині жорсткого колеса 24; поверхні 18а і 18b першого ступеня 16 розташовані поза ротором 15 електродвигуна 6; вихідний вал 8 приєднаний до сепаратора 26, є порожнистим і має всередині шліцеву поверхню 42, а також продовження у вигляді порожнистої маточини 43 із закріпленим на ній фланцем 9, з'єднаним з керованою аеродинамічною поверхнею 1; на частині внутрішньої поверхні маточини 43 розташована шліцева поверхня 44, що збігається зі шліцевою поверхнею 3 UA 103549 C2 5 10 15 20 25 30 35 40 45 50 55 60 42 вихідного вала 8; усередині вихідного вала 8 і частини маточини 43 встановлений шліцевий стакан 45, усередині якого є спіраль, що зминається, 46, приєднана до дна стакана 45; усередині маточини 43 встановлений пристрій 47 виштовхування шліцевого стакана 45 зі шліцевої поверхні 44 маточини 43. Для зменшення моменту інерції і маси ротора 15 і вала 14 електродвигуна 6 співвідношення довжини статора 13 і його внутрішнього діаметра перебуває в інтервалі 1-2. Для істотного збільшення крутного моменту при великих оборотах ротора 15 -1 електродвигуна 6 (5000-25000 хв ) двоступеневий хвильовий редуктор має передатне відношення 500-2500. За передатного відношення менше 500 забезпечення електродвигуном необхідного крутного моменту досягається при такому значенні струму, при якому відбувається посилене нагрівання електродвигуна внаслідок теплових втрат, що виділяються в обмотці. За передатного відношення більше 2500 необхідна висока частота обертання ротора електродвигуна, що -1 перевищує 25000 хв , при якій на ротор діють значні навантаження від відцентрових сил. Для швидкого роз'єднання електромеханічного приводу 3 або 4, навантаженого максимальним розрахунковим крутним моментом, і керованої аеродинамічної поверхні 1 при відмові електродвигуна 6 блоку керування (не показаний) датчика 37 положення ротора, датчика 39 положення вихідного вала або заклинюванні двоступеневої хвильової передачі 7, засіб 12 аварійного роз'єднання вихідного вала 8 електромеханічного приводу 3 або 4 і керованої аеродинамічної поверхні 1, у порожнину вихідного вала поміщений піропатрон 48 (фіг. 4) з піротехнічним зарядом 49 і електричним ініціатором 50 горіння піротехнічного заряду 49. При включенні електромеханічного приводу 3 і 4 подається напруга на пари обмоток 34 статора 32 стопорного пристрою 31, якір 35 повертається, розриваючи кінематичний зв'язок стопора 36 із зубчастим колесом 36а, з'єднаним валом 14 і, таким чином, вивільняє вал 14. Якір 35 фіксується в цьому положенні постійними магнітами 33 після зняття напруги з обмоток статора 32 стопорного пристрою 31. Блок керування електромеханічного приводу (не показаний) на основі командного сигналу, сигналів із сигнальних обмоток датчика 39, положення вихідного вала 8 і датчика 37 положення ротора 15 електродвигуна 6, зрушує ротор 15, вал 14 і з'єднаний з ним вхідний вал 17. При обертанні вхідного вала 17 обертаються ексцентрично розташуванню поверхні 18а і 18b та диски 22. Сепаратор 19 дозволяє тілам кочення 21 переміщуватися тільки в радіальному напрямку, здійснюючи хвилеподібні рухи з періодом, рівним періоду обертання вхідного вала 17 і амплітудою, рівною подвоєному ексцентриситету поверхонь 18а і 18b. Тіла кочення 21, взаємодіючи з профільованою поверхнею хвилеутворювача 23 жорсткого колеса 24, повертають його на кут, менший кута повороту вхідного вала 17 у кількість разів, рівну кількості хвиль на поверхні хвилеутворювача 23 жорсткого колеса 24. Поворот жорсткого колеса 24 зрушує виконані на ньому ексцентрично розташовані поверхні 25а і 25b. Тіла кочення 27 переміщаються в гніздах сепаратора 26 під дією кілець 29а і 29b в радіальному напрямку, роблячи складний рух, що є сукупністю обертального руху сепаратора 26 і радіального руху з амплітудою, рівною подвоєному ексцентриситету поверхні 25а або 25b. Тіла кочення 27, взаємодіючи з поверхнею другого хвилеутворювача 28, закріпленого нерухомо, повертають сепаратор 26 на кут, менший кута повороту жорсткого колеса 24 у кількість разів, на одиницю меншу кількості хвиль на поверхні другого хвилеутворювача 28. Разом із сепаратором 26 повертається вихідний вал 8, шліцевий стакан 45 і маточина 43, що знаходяться з ним у зачепленні. Спіраль, що зминається, 46, встановлена з натягом всередині шліцевого стакана 45, притискає стакан 45 до внутрішнього торця маточини 43. Таким чином, обертання сепаратора 26 передається на вихідний вал 8. При відключенні електромеханічної передачі подається напруга на пари обмоток 34 (фіг. 6) статора 32 стопорного пристрою 31, якір 35 повертається у вихідне положення, забезпечуючи кінематичний зв'язок стопора 36 з валом 14 і фіксує вал 14 ротора 15. Якір 35 фіксується у вихідному положенні постійними магнітами 33 після зняття напруги з обмоток 34 статора 32 стопорного пристрою 31. Для відключення електромеханічної передачі від об'єкта регулювання при відмові електродвигуна 6 блоку керування (не показаний), датчика 37 положення ротора, датчика 39 положення вихідного вала 8 або заклинюванні двоступеневої хвильової передачі 16 блок аналізу стану приводу (не показаний) подає сигнал на включення електричного ініціатора 50 для запалення піротехнічного заряду 49 піропатрона 48; тиск газу, що виникає при горінні заряду 49, діє на дно шліцевого стакана 45 і створює силу, що перевищує силу стискання спіралі, що зминається, 46 і силу тертя стакана 45 при його русі всередині вихідного вала 8; 4 UA 103549 C2 5 спіраль 46 спочатку пружно, а потім пластично деформується; стакан 45 переміщуючись виходить із зачеплення з маточиною 43, що разом із фланцем і керованою аеродинамічною поверхнею 1 може повертатися відносно вихідного вала 8. Після вигоряння піротехнічного заряду 49 і виходу відпрацьованого газу деформована спіраль 46 не відновлюється і стакан 45 залишається всередині вихідного вала 8. ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 1. Пристрій електромеханічного приводу аеродинамічної поверхні літака, що має керовану аеродинамічну поверхню, приєднаний до нерухомої відносно фюзеляжу аеродинамічної поверхні з можливістю обертання; перший і другий електромеханічні приводи, встановлені співвісно між нерухомою відносно фюзеляжу і керованою аеродинамічною поверхнею, кожний з яких складається з корпуса з розміщеним усередині електродвигуном і розташованого співвісно електродвигуну редуктора з вихідною обертовою ланкою, з'єднаною з керованою аеродинамічною поверхнею; засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні для забезпечення обертання керованої аеродинамічної поверхні, який відрізняється тим, що кожний електромеханічний привід має нерухомий корпус, закріплений на нерухомій відносно фюзеляжу аеродинамічній поверхні, редуктором в електромеханічному приводі є двоступенева хвильова передача, обертова ланка якої виконана у вигляді вихідного порожнистого вала із фланцем, закріпленим на керованій аеродинамічній поверхні таким чином, що вісь обертання керованої аеродинамічної поверхні сполучена з осями обертання першого і другого електромеханічного приводу, а засоби аварійного роз'єднання керованої та нерухомої відносно фюзеляжу аеродинамічної поверхні розміщені вісесиметрично у вихідному порожнистому валу електромеханічного приводу. 2. Пристрій за п. 1, який відрізняється тим, що електромеханічний привід складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною і торцевими частинами, закріплюваного нерухомо на нерухомій відносно фюзеляжу аеродинамічній поверхні, електродвигуна, що має статор і закріплений на валу ротор, розташовані всередині другого ступеня; двоступеневої хвильової передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол з ексцентрично розташованими поверхнями; сепаратора першого ступеня хвильової передачі з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними встановленими на ексцентрично розташованих поверхнях робочими дисками відносно хвилеутворювача у жорсткому колесі першого ступеня, що має на зовнішній частині ексцентрично розташовані поверхні для другого ступеня; сепаратор другого ступеня з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними кільцями, встановленими на ексцентрично розташованих на жорсткому колесі поверхнях, відносно другого хвилеутворювача на внутрішній поверхні циліндричної частини корпуса; вихідного вала, що спирається на тіла кочення і підшипники кочення, який має шліци на внутрішній поверхні, а також продовження у вигляді порожнистої маточини із закріпленим на ній фланцем, з'єднаним з привідним об'єктом; на частині внутрішньої поверхні маточини є шліцева поверхня, що збігається з внутрішньою шліцевою поверхнею вихідного вала; всередині шліцевого вала і частини маточини встановлений шліцевий стакан, усередині якого є спіраль, що зминається, приєднана до дна стакана; всередині маточини встановлений пристрій виштовхування шліцевого стакана зі шліцевої частини маточини; вузлів, що забезпечують керування роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів і обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм і електродвигуном датчика положення ротора електродвигуна, з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом. 3. Пристрій за п. 1, який відрізняється тим, що пристрій виштовхування шліцевого стакана зі шліцевої частини маточини має піропатрон з піротехнічним зарядом і електричним ініціатором горіння піротехнічного заряду. 5 UA 103549 C2 6 UA 103549 C2 7 UA 103549 C2 8 UA 103549 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюУстройство электромеханического привода аэродинамической поверхности самолёта
Автори російськоюАлексашин Анатолий Алексеевич, Нестеров Виктор Антонович, Урсу Валентин Евгеньевич
МПК / Мітки
МПК: B64C 13/24
Мітки: поверхні, приводу, електромеханічного, пристрій, літака, аеродинамічної
Код посилання
<a href="https://ua.patents.su/11-103549-pristrijj-elektromekhanichnogo-privodu-aerodinamichno-poverkhni-litaka.html" target="_blank" rel="follow" title="База патентів України">Пристрій електромеханічного приводу аеродинамічної поверхні літака</a>
Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 25834
Опубліковано: 27.08.2007
Автори: Баглєй Олег Вікторович, Піщухіна Ольга Олександрівна, Бандура Іван Миколайович, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: привід, рульовий, апарата, керованої, поверхні, літального, аеродинамічної
Формула / Реферат:
Рульовий привід керованої аеродинамічної поверхні літального апарата, що містить у своєму складі керуючу аеродинамічну поверхню, вісь керованої аеродинамічної поверхні, датчик кута, датчик кутової швидкості і датчик кутового прискорення повороту керованої аеродинамічної поверхні, виходи яких через підсумовуючий підсилювач, підсилювач потужності підключені до керуючої ланки рульової машини, який відрізняється тим, що в нього введені автономна...
Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 26230
Опубліковано: 10.09.2007
Автори: Піщухіна Ольга Олександрівна, Бандура Іван Миколайович, Жернокльов Тетяна Володимирівна, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: поверхні, аеродинамічної, апарата, рульовий, літального, привід, керованої
Формула / Реферат:
Рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним...
Пристрій для гальмування електромеханічного приводу моста вантажопідйомного крана
Номер патенту: 4968
Опубліковано: 15.02.2005
Автори: Конев Іван Сергійович, Живолуга Сергій Вікторович, Токарев Веніамін Петрович, Токарев Валерій Веніамінович, Власов Валерій Вікторович, Кукса Євген Володимирович, Товстун Мілан Васильович, Махсма Михайло Миколайович
МПК: F16D 51/00, H02P 3/18
Мітки: моста, електромеханічного, приводу, вантажопідйомного, пристрій, гальмування, крана
Формула / Реферат:
1. Пристрій для гальмування електромеханічного приводу моста вантажопідйомного крана, що включає силове коло електродвигуна, у яке послідовно ввімкнений реверсивний контактор і паралельно - електродвигун гідроштовхача гальма, який відрізняється тим, що в силове коло електродвигуна електромеханічного приводу моста паралельно ввімкнено реле пуску електродвигуна гідроштовхача гальма, нормально відкриті контакти якого послідовно ввімкнені в...
Пристрій для гальмування електромеханічного приводу візка вантажопідйомного крана
Номер патенту: 75479
Опубліковано: 17.04.2006
Автори: Кукса Євген Володимирович, Власов Валерій Вікторович, Конев Іван Сергійович, Токарев Веніамін Петрович, Токарев Валерій Веніамінович, Салієв Андрій Іванович, Кірей Дмитро Анатолійович
МПК: F16D 51/00, H02P 3/18
Мітки: гальмування, пристрій, вантажопідйомного, приводу, електромеханічного, візка, крана
Формула / Реферат:
1. Пристрій для гальмування електромеханічного приводу візка вантажопідйомного крана, що містить загальне силове коло електродвигуна, у яке послідовно ввімкнений реверсивний контактор і паралельно - електродвигун гідроштовхача гальма, який відрізняється тим, що у загальне силове коло електродвигуна електромеханічного приводу візка паралельно ввімкнений блок автоматики двоступінчастого гальмування і паралельно - реле вмикання блока автоматики,...
Пристрій для двоступінчастого гальмування електромеханічного приводу механізмів горизонтального переміщення вантажу електромостового крана
Номер патенту: 15913
Опубліковано: 17.07.2006
Автори: Доманов Валерій Анатолійович, Токарев Валерій Веніамінович, Токарев Веніамін Петрович, Баранов Михайло Григорович, Кирильченко Петро Миколайович, Ірха Віктор Миколайович, Бойко Володимир Семенович
МПК: F16D 51/00, H02P 3/18
Мітки: пристрій, приводу, механізмів, вантажу, крана, горизонтального, переміщення, двоступінчастого, гальмування, електромостового, електромеханічного
Формула / Реферат:
Пристрій для двоступінчастого гальмування електромеханічного приводу механізмів горизонтального переміщення вантажу електромостового крана, що містить силове коло електродвигуна, у яке послідовно ввімкнений реверсивний контактор і паралельно - електродвигун гідроштовхача гальма, у силове коло електродвигуна електромеханічного приводу моста паралельно ввімкнено реле пуску електродвигуна гідроштовхача гальма, нормально відкриті контакти якого...
Попередній патент: Спосіб автоматичного керування на основі зворотного зв’язку по відхиленню величини та фазового запізнення вихідного сигналу об’єкта керування
Наступний патент: Культиватор з двома рядами дисків в напрямку руху
Випадковий патент: Стенд для дослідження сили тертя у ковзунах візка вантажного вагона