Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 26230
Опубліковано: 10.09.2007
Автори: Піщухіна Ольга Олександрівна, Фірсов Сергій Миколайович, Бандура Іван Миколайович, Жернокльов Тетяна Володимирівна
Формула / Реферат
Рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової машини, при цьому перший вхід підсумовуючого підсилювача з'єднаний з виходом блока формування вхідного сигналу рульового приводу, другий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кута повороту керованої аеродинамічної поверхні відносно корпуса літального апарата, третій вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутової швидкості, четвертий вхід підсумовуючого підсилювача з'єднаний з виходом датчика кутового прискорення, вихід підсумовуючого підсилювача з'єднаний зі входом підсилювача потужності, а вихід підсилювача потужності з'єднаний зі входом керуючої ланки рульової машини, який відрізняється тим, що має електромагнітну муфту, яка механічним зв'язком поєднана з веденим роликом з одного боку та ведучим роликом з іншого.
Текст
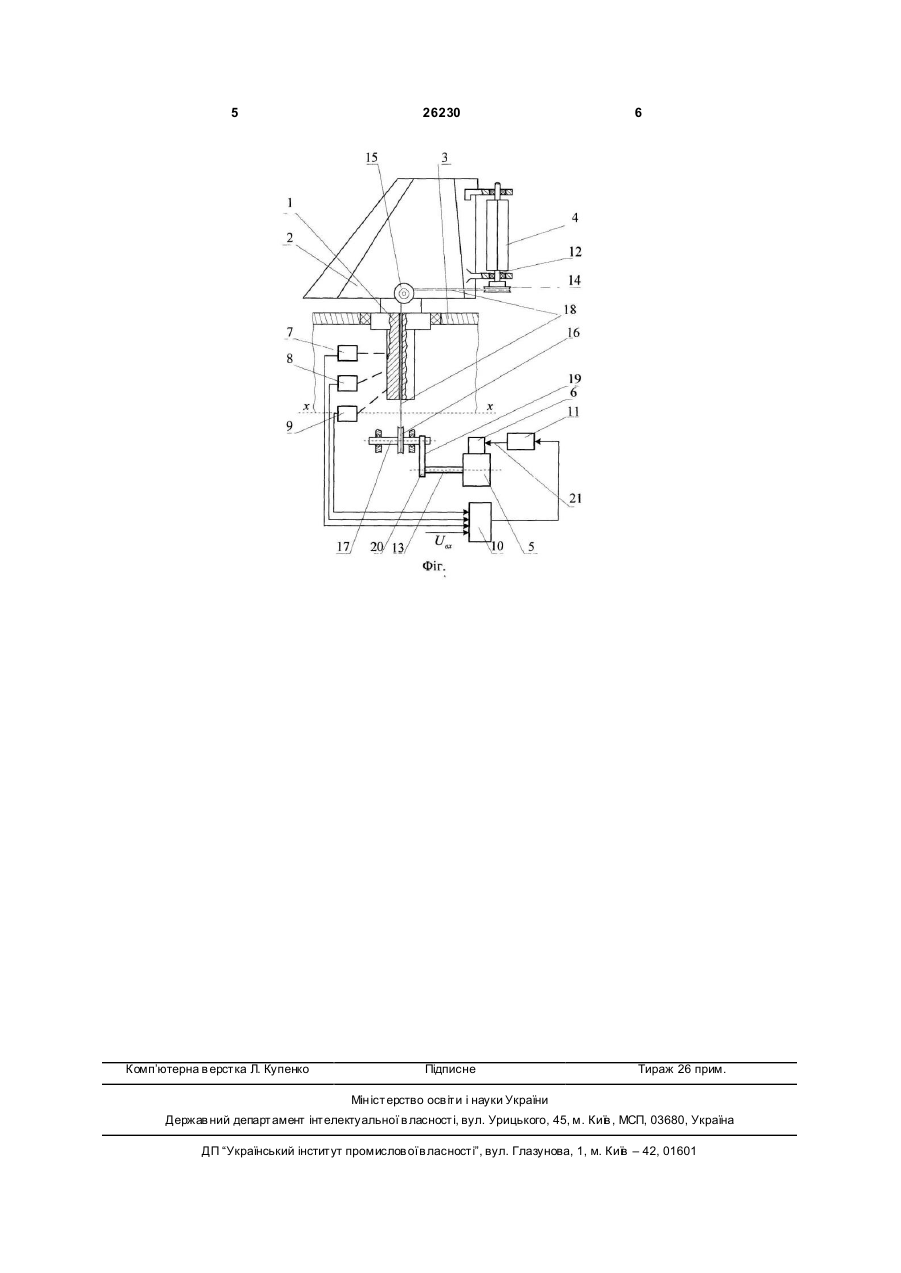
Рульовий привід керованої аеродинамічної поверхні літального апарата, що має рульову машину з керуючою ланкою та вихідним валом, датчик кута, датчик кутової швидкості, датчик кутового прискорення повороту керованої аеродинамічної поверхні, підсумовуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестірню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової ма 3 26230 рення повороту керованої аеродинамічної поверхні, сумуючий підсилювач та підсилювач потужності, ведений ролик, ведучий ролик, вал, тросову проводку, зубчатий сектор, шестерню, керуючу аеродинамічну поверхню, яка механічним зв'язком з'єднана з вихідним валом рульової машини, при цьому перший вхід сумуючого підсилювача з'єднаний з виходом блока формування вхідного сигналу рульового приводу, другий вхід сум уючого підсилювача з'єднаний з виходом датчика кута повороту керованої аеродинамічної поверхні відносно корпуса літального апарата, третій вхід сумуючого підсилювача поєднаний з виходом датчика кутової швидкості, четвертий вхід сум уючого підсилювача з'єднаний з виходом датчика кутового прискорення, вихід сумуючого підсилювача з'єднаний зі входом підсилювача потужності, а вихід підсилювача потужності з'єднаний зі входом керуючої ланки рульової машини, згідно з корисною моделлю введено електромагнітну муфту, яка механічним зв'язком поєднана з веденим роликом з одного боку та ведучим роликом - з іншого. Запропоноване технічне рішення пояснюється конструктивно-функціональною схемою рульового приводу керованої аеродинамічної поверхні літального апарату, приведеною на Фіг., На конструктивно-функціональній схемі рульового приводу керованої аеродинамічної поверхні літального апарату позначено: 1 - вісь керованої аеродинамічної поверхні, 2 - керована аеродинамічна поверхня, 3 - корпус літального апарату, 4 керуюча аеродинамічна поверхня, 5 - рульова машина, 6 - керуюча ланка рульової машини 5, 7 датчик кута, 8 - датчик кутової швидкості, 9 - датчик кутового прискорення повороту керованої аеродинамічної поверхні 2 відносно корпуса 3 літального апарата, 10 - сумуючий підсилювач, 11 підсилювач потужності, 12 - вісь керуючої аеродинамічної поверхні 2, 13 - вихідний вал рульової машини 5, 14 - ведений ролик, 15 - електромагнітна муфта, 16 - ведучий ролик, 17 - вал, 18 - тросова проводка, 19 - зубчатий сектор, 20 - шестерня, 21 - вхідний електричний сигнал рульового приводу. Пунктирними лініями вказані механічні зв'язки датчика кута 7, датчика кутової швидкості 8 та датчика кутового прискорення 9 з віссю 1 керованої 4 аеродинамічної поверхні 2, х-х - продольна вісь літального апарату. Рульовий привід керованої аеродинамічної поверхні 2 літального апарату працює наступним чином. Вихідні сигнали датчиків кута 7, кутової швидкості 8 та кутового прискорення 9 повороту керованої аеродинамічної поверхні 2 відносно корпуса 3 літального апарата, які безперервно вимірюють характеристики (кут, к утову швидкість та кутове прискорення) повороту керованої аеродинамічної поверхні 2 літального апарату, подаються на сумуючий підсилювач 10, а його вихідний сигнал -через підсилювач потужності 11 на вхід керуючої ланки 6 рульової машини 5, яка повертає вихідний вал 13 рульової машини 5. Через шестерню 20 та зубчатий сектор 13 обертання передається на вал 17 та встановлений на ньому ведучий ролик 16. Тросова проводка 18, що проходить через ведучий ролик 16, електромагнітну муфту 15 та ведений ролик 14, що закріплений на вісі 12 керуючої аеродинамічної поверхні 4, передає обертання на вісь 12 керуючої аеродинамічної поверхні, внаслідок чого керуюча аеродинамічна поверхня відхиляється. Це призводить до зменшення кутового прискорення керованої аеродинамічної поверхні 2. Поворот керуючої аеродинамічної поверхні 4 відбуватиметься доки керована аеродинамічні поверхня 2 не відхилиться на заданий кут. Робота електромагнітної муфти 15 полягає в наступному. При нормальній роботі рульового приводу керованої аеродинамічної поверхні 2 літального апарату електромагнітна муфта 15 вимкнена. В реальному часі здійснюється порівняння сил натягу тросової проводки 18 між ведучим роликом 16 та електромагнітною муфтою 15 та веденим роликом 14 та електромагнітною муфтою 15. Якщо зі сторони ведучого ролика 16 сила натягу є, а зі сторони веденого ролика 14 її нема, то муфта 15 вмикається та роз'єднує канал управління керуючою аеродинамічною поверхнею 4. Така ситуація може скластися внаслідок обриву тросової проводки 18 і може призвести до відмови роботи рульового приводу керованої аеродинамічної поверхні 2 літального апарату. Реалізація пропозиції дозволить підвищити надійність роботи рульового приводу керованої аеродинамічної поверхні літального апарату. 5 Комп’ютерна в ерстка Л. Купенко 26230 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSteering drive of controlled aerodynamic surface of aircraft
Автори англійськоюFirsov Serhii Mykolaiovych, Pischukhina Olha Oleksandrivna, Bandura Ivan Mykolaiovych
Назва патенту російськоюРулевой привод управляемой аэродинамической поверхности летательного аппарата
Автори російськоюФирсов Сергей Николаевич, Пищухина Ольга Александровна, Бандура Иван Николаевич
МПК / Мітки
МПК: B64C 13/00
Мітки: аеродинамічної, апарата, поверхні, літального, керованої, привід, рульовий
Код посилання
<a href="https://ua.patents.su/3-26230-rulovijj-privid-kerovano-aerodinamichno-poverkhni-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Рульовий привід керованої аеродинамічної поверхні літального апарата</a>
Рульовий привід керованої аеродинамічної поверхні літального апарата
Номер патенту: 25834
Опубліковано: 27.08.2007
Автори: Бандура Іван Миколайович, Баглєй Олег Вікторович, Піщухіна Ольга Олександрівна, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: рульовий, привід, апарата, аеродинамічної, поверхні, керованої, літального
Формула / Реферат:
Рульовий привід керованої аеродинамічної поверхні літального апарата, що містить у своєму складі керуючу аеродинамічну поверхню, вісь керованої аеродинамічної поверхні, датчик кута, датчик кутової швидкості і датчик кутового прискорення повороту керованої аеродинамічної поверхні, виходи яких через підсумовуючий підсилювач, підсилювач потужності підключені до керуючої ланки рульової машини, який відрізняється тим, що в нього введені автономна...
Крило літального апарата
Номер патенту: 64342
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
Мітки: крило, літального, апарата
Формула / Реферат:
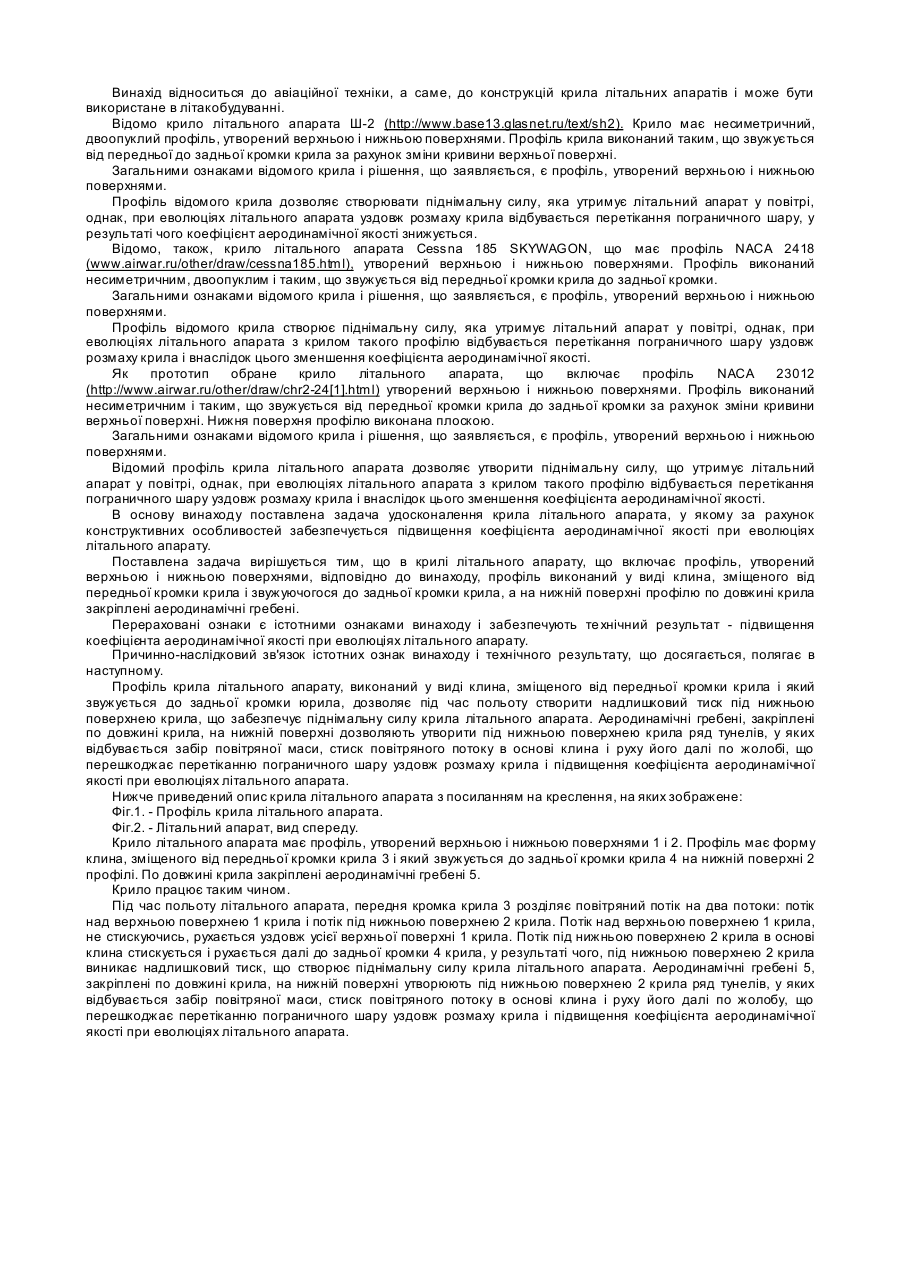
Крило літального апарата, що включає профіль, утворений верхньою і нижньою поверхнями, яке відрізняється тим, що профіль виконаний у вигляді клина, зміщеного від передньої кромки крила і який звужується до задньої кромки крила, а на нижній поверхні профілю по довжині крила закріплені аеродинамічні гребені.
Пристрій для управління секціями аеродинамічної поверхні літального апарату
Номер патенту: 16305
Опубліковано: 29.08.1997
Автори: Мухін Євгеній Георгійович, Старинський Віктор Васильович, Рижко Вячеслав Федорович, Старицький Геннадій Павлович
МПК: B64C 13/00
Мітки: апарату, аеродинамічної, літального, пристрій, управління, поверхні, секціями
Формула / Реферат:
Устройство для управлення секциями аэродинамической поверхности летательного аппарата, содержащее исполнительный механизм, выход которого кинематически связан с двумя секциями аэродинамической поверхности летательного аппарата, два командных датчика, два ключа, выходы которых соединены с входами исполнительного механизма, источник постоянного напряжения и два элемента И, отличающееся тем, что, с целью повышения эксплуатационной надежности...
Слідкувальний електричний рульовий привід

Номер патенту: 73793
Опубліковано: 15.09.2005
Автори: Доценко Борис Іванович, Егліт Микола Олександрович, Шепелєв Юрій Іванович, Хіміч Світлана Іллівна, Кузьмін В'ячеслав Павлович, Бондарчук Павло Степанович, Яковенко Петро Олексійович
МПК: F42B 15/01
Мітки: слідкувальний, рульовий, електричний, привід
Формула / Реферат:
Слідкувальний електричний рульовий привід, що містить послідовно з'єднані підсилювач-суматор, який має керуючий вхід, коригуючу ланку, підсилювач потужності, вихід якого підключений до виконавчого двигуна, редуктор і датчик зворотного зв'язку, причому вихід датчика зворотного зв'язку підключений до другого входу підсилювача-суматора, який відрізняється тим, що до нього введені послідовно з'єднані перший фільтр низьких частот, аперіодична...
Кесон аеродинамічної поверхні літального апарату з композиційних матеріалів
Номер патенту: 62034
Опубліковано: 15.12.2003
Автори: Брагілєвський Валентин Зіновійович, Балабуєв Петро Васильович, Казуров Віктор Миколайович, Цариковський Володимир Іванович, Гиндін Гиліл Пейсахович, Ричік Віктор Петрович
МПК: B64C 3/26
Мітки: літального, поверхні, композиційних, апарату, аеродинамічної, кесон, матеріалів
Формула / Реферат:
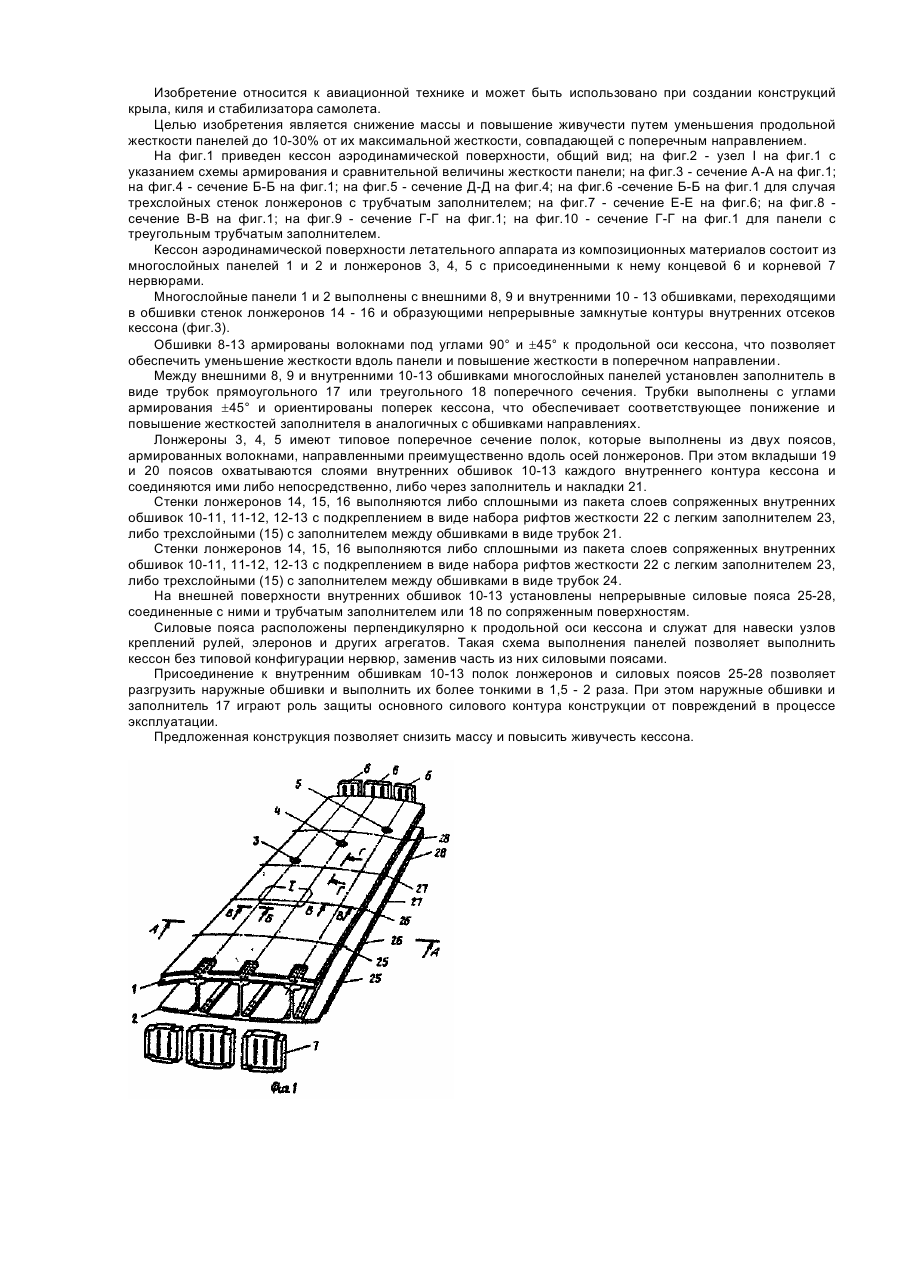
1. Кессон аэродинамической поверхности летательного аппарата из композиционных материалов, содержащий по крайней мере три продольных лонжерона с полками, скрепленными между собой стенками, и нервюры, соединенные многослойными панелями, образующими аэродинамический контур, выполненными с наружными и внутренними слоистыми обшивками, армированными волокнами, и соединенными трубчатым заполнителем, отличающийся тем, что, с целью снижения массы и...
Попередній патент: Установка для досліджень металів за циклічних навантажень чистим згином у середовищі газів підвищених температур та тисків
Наступний патент: Кран керування тиском
Випадковий патент: Спосіб корекції рогівкового астигматизму при хірургічному лікуванні глаукоми, поєднаної з катарактою