Спосіб і пристрій для контролю ходового стану одиниці рейкового рухомого складу
Номер патенту: 104777
Опубліковано: 11.03.2014
Автори: Зедлмайр Стефан, Гюнтер Франк, Вах Йорг-Йоханнес, Фрізен Ульф

Формула / Реферат
1. Спосіб контролю ходового стану одиниці рейкового рухомого складу, де уловлюють принаймні одну вимірювану величину, що характеризує коливні властивості принаймні однієї колісної пари, тобто таку як рух, швидкість або прискорення цієї колісної пари або ж сила, що діє на цю колісну пару, за допомогою принаймні одного датчика (2), котрий видає принаймні один відповідний вимірювальний сигнал, і де зазначений спосіб, який відрізняється тим, що включає наступні стадії:
- ідентифікацію принаймні однієї значущої події або комбінації значущих подій у часовому інтервалі вимірювальних сигналів, де вимірювані величини є вищими або нижчими заданого порогового рівня, а також ідентифікацію точки часу виникнення події, в котрій дана подія виникла;
- побудову частотної характеристики за кривою часового ходу вимірювального сигналу від точки часу виникнення події, де частотну характеристику будують на певний часовий інтервал (ta) від точки часу виникнення події;
- порівняння побудованої частотної характеристики принаймні з однією зафіксованою в пам'яті еталонною частотною характеристикою;
- оцінку коливних властивостей даної колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї зафіксованої в пам'яті еталонної частотної характеристики.
2. Спосіб за п. 1, який відрізняється тим, що як вимірювану величину, що характеризує коливні властивості колісної пари, використовують прискорення колісної пари (1) у вертикальному напрямку, причому значущу подію в межах часового ходу прискорення ідентифікують за перевищенням вимірюваним прискоренням колісної пари (1) певної мінімальної величини (amin).
3. Спосіб за п. 2, який відрізняється тим, що сума визначеної мінімальної величини (аmin) вертикального прискорення складає принаймні 10 g.
4. Спосіб за одним із попередніх пунктів, який відрізняється тим, що частотну характеристику будують із часового ходу вимірювального сигналу шляхом швидкого перетворення Фур'є (FFT: Fast-Fourier-Transformation).
5. Спосіб за одним із попередніх пунктів, який відрізняється тим, що визначений часовий інтервал (ta), на котрий будують частотну характеристику за часовим ходом вимірювального сигналу, є завжди фіксованим.
6. Спосіб за одним із пп. 1-5, який відрізняється тим, що визначений часовий інтервал (ta), на котрий будують частотну характеристику за часовим ходом вимірювального сигналу, починається в точці часу виникнення події і закінчується, коли надходить певна характеристична властивість коливання, наприклад певна величина згасання коливання, або відбувається подальша або наступна значуща подія.
7. Спосіб за одним із попередніх пунктів, який відрізняється тим, що еталонною частотною характеристикою є очікувана частотна характеристика, яку будують шляхом моделювального обчислювання або на базі типового зразка колісної пари.
8. Спосіб за одним із пп. 1-6, який відрізняється тим, що еталонною частотною характеристикою є принаймні одна частотна характеристика, побудована у процесі експлуатації одиниці рейкового рухомого складу за кривими часового ходу вимірюваної величини контрольованої колісної пари (1) або визначена шляхом усереднення множини частотних характеристик контрольованої колісної пари (1), або множини інших колісних пар.
9. Спосіб за п. 8, який відрізняється тим, що частотну характеристику порівнюють з множиною еталонних частотних характеристик контрольованої колісної пари (1), побудованих за кривими часового ходу вимірюваної величини у процесі експлуатації одиниці рейкового рухомого складу для статистичної оцінки протягом тривалого часу.
10. Спосіб за одним із попередніх пунктів, який відрізняється тим, що порівняння побудованої частотної характеристики принаймні з однією еталонною частотною характеристикою здійснюють за допомогою принаймні одного модального параметра, такого як власна частота, коефіцієнт демпфування або пружність.
11. Спосіб за одним із попередніх пунктів, який відрізняється тим, що при порівнянні частотної характеристики принаймні з однією еталонною частотною характеристикою враховують вплив фактичного стану зносу колісної пари і фактичне число обертів колісної пари (1).
12. Пристрій для контролю ходового стану одиниці рейкового рухомого складу, при якому уловлюють принаймні одну вимірювану величину, що характеризує коливні властивості принаймні однієї колісної пари (1), тобто таку як рух, швидкість або прискорення цієї колісної пари, або ж сила, що діє на цю колісну пару, за допомогою принаймні одного датчика (2), який видає принаймні один відповідний вимірювальний сигнал, і де зазначений пристрій відрізняється тим, що пристрій (8) прийому, попередньої обробки сигналів та оцінки, побудований таким чином, що він здійснює принаймні такі стадії:
- ідентифікацію принаймні однієї значущої події або комбінації значущих подій у часовому інтервалі вимірювальних сигналів, де вимірювані величини є вищими або нижчими заданого порогового рівня, а також ідентифікацію точки часу виникнення події, в котрій дана подія виникла;
- побудову частотної характеристики за кривою часового ходу вимірювального сигналу від точки часу виникнення події, де частотну характеристику будують на певний часовий інтервал (ta) від точки часу виникнення події;
- порівняння побудованої частотної характеристики принаймні з однією зафіксованою в пам'яті еталонною частотною характеристикою;
- оцінку коливних властивостей даної колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї зафіксованої в пам'яті еталонної частотної характеристики.
13. Пристрій за п. 12, який відрізняється тим, що згаданий пристрій прийому, попередньої обробки сигналів та оцінки, містить принаймні:
- блок (3) прийому сигналів, який ідентифікує значущі події в межах часового ходу вимірювальних сигналів, а також приналежні точки часу виникнення подій;
- блок (4) частотного аналізу, який будує частотну характеристику із часового ходу вимірювального сигналу від точки часу виникнення події на певний часовий інтервал (ta);
- блок (5) порівняння, який служить для порівняння побудованої частотної характеристики принаймні з однією еталонною частотною характеристикою, що зберігається в пам'яті;
- блок (6) оцінки, який служить для оцінки коливних властивостей колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї еталонної частотної характеристики, що зберігається в пам'яті.
14. Пристрій за п. 13, який відрізняється тим, що пристрій (8) прийому, попередньої обробки сигналів та оцінки, містить, крім того, блок усереднення, який усереднює множину частотних характеристик контрольованої колісної пари або множини інших колісних пар і за отриманими результатами будує еталонну частотну характеристику.
15. Пристрій за одним із пп. 12-14, який відрізняється тим, що він включає у себе принаймні один датчик (2) для уловлювання прискорення колісної пари (1) у вертикальному напрямку.
Текст
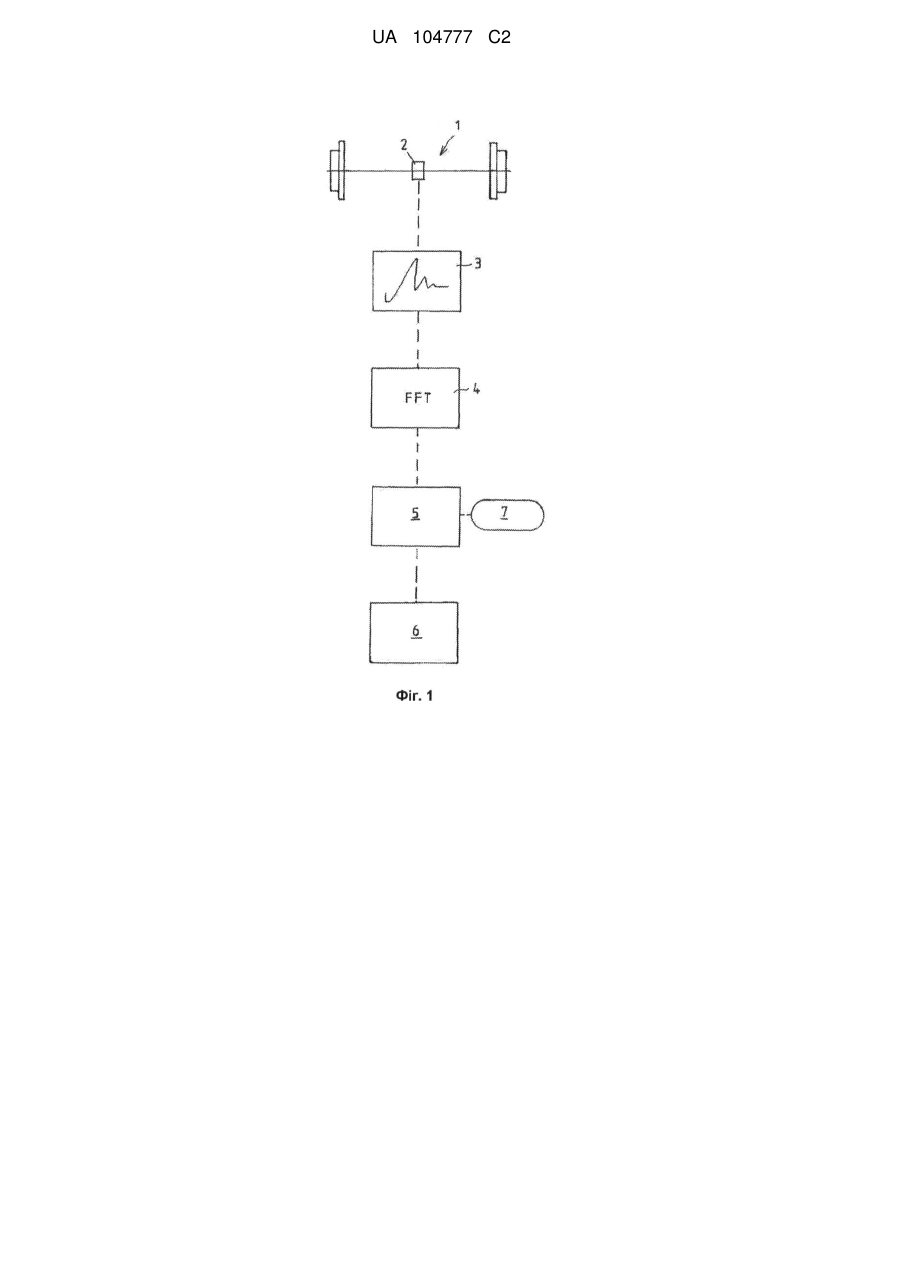
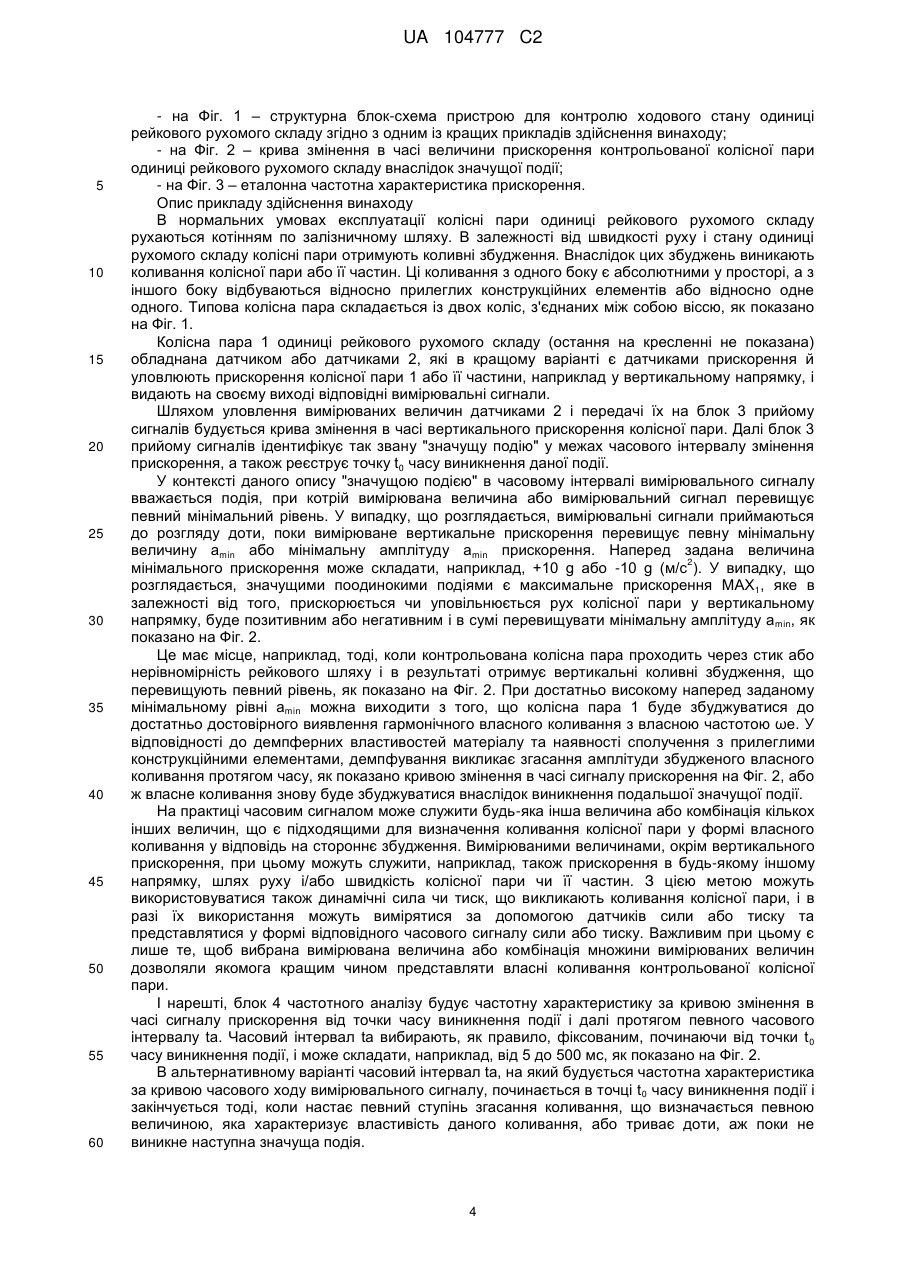
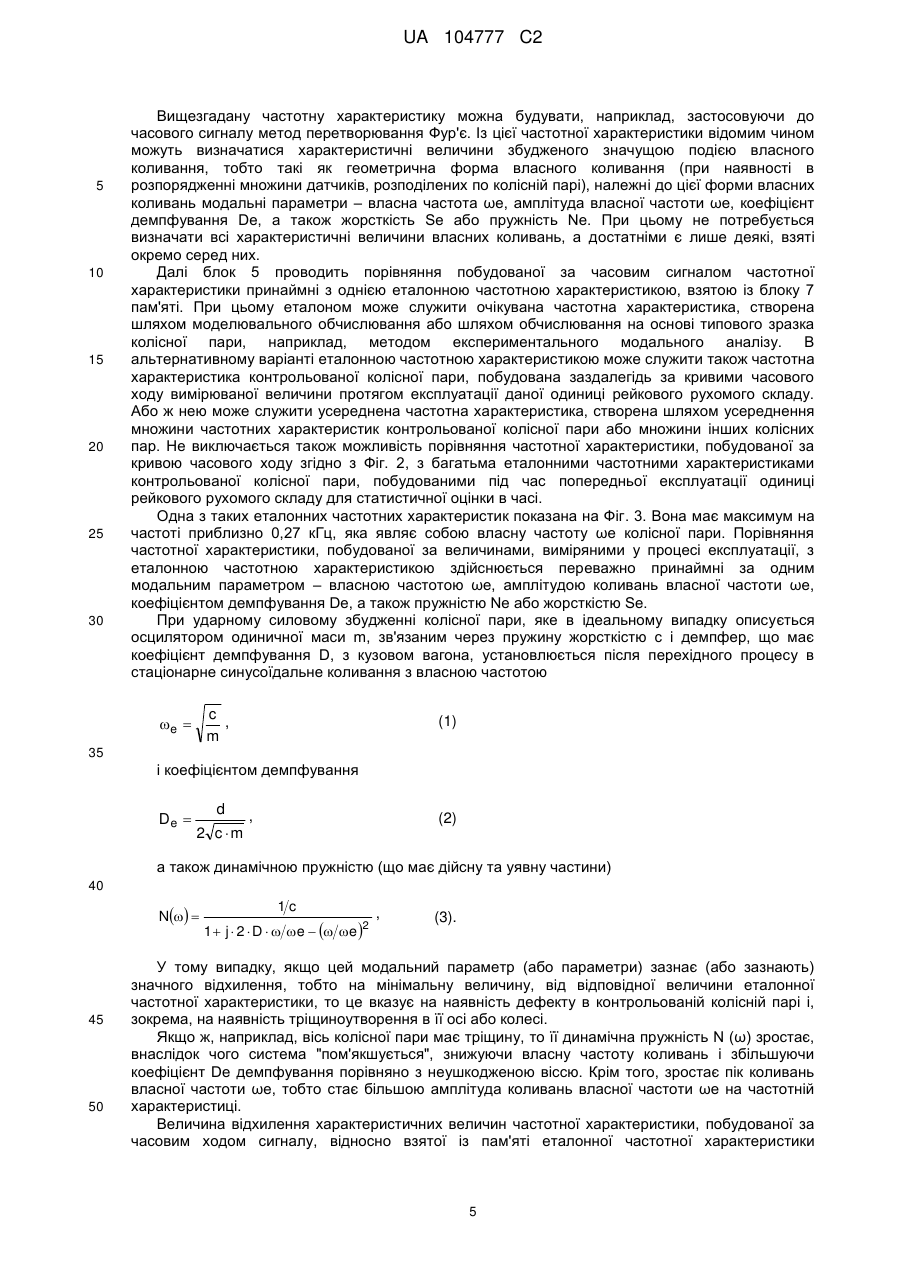
Реферат: Винахід стосується способу і пристрою для контролю ходового стану одиниці рейкового рухомого складу шляхом уловлювання принаймні однієї вимірюваної величини, що характеризує коливні властивості принаймні однієї колісної пари, тобто такої величини як рух, швидкість або прискорення цієї колісної пари, або ж сила, що діє на цю колісну пару, за допомогою принаймні одного датчика (2), котрий видає принаймні один відповідний вимірювальний сигнал. Запропонований спосіб включає у себе такі стадії: ідентифікацію принаймні однієї значущої події або комбінації значущих подій у часовому інтервалі вимірювальних сигналів, де вимірювані величини є вищими або нижчими заданого порогового рівня, а також ідентифікацію точки часу виникнення події, в котрій дана подія виникла; побудову частотної характеристики за кривою часового ходу вимірювального сигналу від точки часу виникнення події, де частотну характеристику будують на певний часовий інтервал (t a) від точки часу виникнення події; порівняння побудованої частотної характеристики принаймні з однією зафіксованою в пам'яті еталонною частотною характеристикою; оцінку коливних властивостей даної колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї еталонної частотної характеристики, зафіксованої в пам'яті. UA 104777 C2 (12) UA 104777 C2 UA 104777 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід належить до способу і пристрою, що відповідають обмежувальним частинам п. 1 і п. 12 Формули винаходу і призначаються для контролю ходового стану одиниці рейкового рухомого складу, для здійснення чого уловлюють принаймні одну вимірювану величину, що характеризує коливні властивості принаймні однієї колісної пари, тобто таку як рух, швидкість або прискорення цієї колісної пари або ж сила, що діє на цю колісну пару, за допомогою принаймні одного датчика, котрий видає принаймні один вимірювальний сигнал. На залізничному транспорті сьогодні значно зростає застосування систем діагностики і контролю, які дозволяють вести регулярне спостереження за змінами стану частин і вузлів конструкцій одиниць рейкового рухомого складу з метою своєчасного виявлення дефектів у цих частинах і вузлах. Особливої цікавості з погляду безпеки руху при цьому набуває виявлення ушкоджень і тріщин у колісних парах одиниць рейкових рухомих складів. В основоположному в даній сфері винаході ЕР 1 274 979 В1 описаний спосіб контролю головних властивостей принаймні одного конструкційного елемента одиниці рейкового рухомого складу, де уловлюють принаймні один сигнал коливання, який далі піддають перетворюванню Фур'є і порівнюють щонайменше з однією еталонною величиною, а спостереження ведуть за піком частоти компоненти власних коливань, що належить певному конструкційному елементу одиниці рейкового рухомого складу, а саме щонайменше за однією характеристичною величиною (частотою, демпфуванням, амплітудою) цих коливань. Інакше кажучи, згідно з цим патентом конструкційний елемент одиниці рухомого складу піддають модальному аналізу певного виду і для виявлення ушкодження в рамках бортової діагностики ведуть спостереження за бажаним модальним параметром, таким як власна частота і демпфування коливань. Але у відомому способі криві змінення в часі вимірювальних сигналів оцінюють недиференційованим чином, тобто оцінку всіх отримуваних сигналів проводять разом, незважаючи на різні граничні умови, такі як тертя зчеплення, тертя ковзання тощо. У зв'язку з цим, отримані внаслідок перетворювання Фур'є характеристичні величини, наприклад, величини власної частоти та її максимальної амплітуди мають відносно великий розкид, що утруднює недвозначну, достовірну оцінку частотних характеристик. Зокрема, спектр збудження в умовах експлуатації виходить настільки різним, що в той чи інший окремий момент часу є неясним, яка частина вимірювального сигналу належить до власних частот контрольованого конструкційного елемента одиниці рухомого складу. Хоча у відомому способі передбачено, що отримані в результаті вимірювань частотні характеристики порівнюють з еталонними частотними характеристиками з урахуванням залежності від відтинку залізничного шляху (новозбудований відтинок шляху, відтинок шляху старого будівництва, відремонтований відтинок шляху тощо), на якому проводяться вимірювання, все одно цей підхід не є позбавленим певних вад. По-перше, він потребує врахування всіх відтинків залізничного шляху, по котрих проходить дана одиниця рухомого складу в нормальних умовах експлуатації. По-друге, стан відтинків шляху при цьому не повинен змінюватися під зовнішнім впливом, або ж еталонні дані повинні постійно підтримуватися відповідно до найостаннішого стану шляху. Але це потребує невиправдано високих витрат, у зв'язку з чим передумови для застосування відомого способу на практиці виявляються неприйнятними. Отже відомий спосіб діагностики і контролю стану конструкційних елементів одиниць рейкового рухомого складу ґрунтується на безперервному і регулярному проведенні вимірювань та оцінок виміряних величин. Але при цьому постійно змінюються граничні умови для вимірюваних величин. Аналіз частотних характеристик, побудованих за отриманими кривими часового ходу вимірювальних сигналів, є доволі витратним, оскільки при цьому потрібно враховувати вплив граничних умов за допомогою еталонних сигналів, залежних від відтинків шляху. Поставлене завдання У зв'язку з вищевикладеним, завданням даного винаходу є вдосконалення способу описаного вище типу і пристрою для його реалізації таким чином, щоб вони при малих витратах на операції з обробки сигналів дозволяли з високою достовірністю виявляти ушкодження і дефекти в колісній парі одиниці рейкового рухомого складу відповідно до ознак п. 1 і п. 12 Формули винаходу. Докладний опис винаходу Даним винаходом пропонуються спосіб і пристрій, де конструкція зазначеного пристрою дозволяє здійснювати такі стадії зазначеного способу: - ідентифікацію принаймні однієї значущої події або комбінації значущих подій у часовому інтервалі вимірювальних сигналів, де вимірювані величини перевищують заданий мінімальний рівень, а також ідентифікацію точки часу виникнення події, в котрій дана подія виникла; 1 UA 104777 C2 5 10 15 20 25 30 35 40 45 50 55 - побудову частотної характеристики за кривою часового ходу вимірювального сигналу від точки часу виникнення події, де частотну характеристику будують на певний часовий інтервал від точки часу виникнення події; - порівняння побудованої частотної характеристики принаймні з однією зафіксованою в пам'яті еталонною частотною характеристикою; - оцінку коливних властивостей даної колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї зафіксованої в пам'яті еталонної частотної характеристики. Метою вищезгаданої оцінки є створення можливості для того, щоб, ґрунтуючись на таких, що змінилися або стали аномальними в певних обставинах, коливних властивостях контрольованої колісної пари, робити висновок про наявність дефекту в даній колісній парі. Перевага технічного рішення згідно з даним винаходом полягає, зокрема, в тому, що воно дозволяє витрати на обчислювальну обробку даних зробити порівняно малими, оскільки вимірювальний сигнал піддається перетворюванню Фур'є та аналізу не безперервно в усьому часовому інтервалі цього сигналу, а лише у відповідь контрольного пристрою на значущу поодиноку подію. Таким чином, завдяки завчасному визначенню значущих подій будуються та піддаються аналізу лише ті частотні характеристики, які з високою достовірністю засвідчують реальний стан контрольованої колісної пари і, зокрема, вказують на наявність в останній тріщиноутворення. Такі значущі події, як, наприклад, збудження вертикальних коливань колісної пари з високим, тобто таким, що перевищує певний мінімальний рівень її прискорення, мають у результаті наслідком те, що дана колісна пара приходить у стан цілком розпізнаваного власного коливання. При достатньо сильному ударному збудженні у вертикальному напрямку, наприклад, при короткочасному підйомі колісної пари під час проходження через велику нерівномірність рейок, відбувається майже повний її відрив від останніх, і вплив на колісну пару з боку рейок на даному відтинку шляху може вважатися дуже малим. При цьому колісна пара отримує можливість бути майже повністю вільною і перебувати у стані власних коливань, і спосіб згідно з винаходом здійснюватиметься незалежно від особливостей залізничного шляху. Крім того, це дозволяє позбавитися необхідності проводити витратний прийом та фіксацію в пам'яті еталонних характеристик, залежних від рейкового шляху. Таким чином, покладена в основу даного винаходу ідея полягає в тому, щоб побудову й аналіз частотних характеристик проводити лише в разі появи значущих поодиноких подій. Значущою поодинокою подією в контексті даного опису є така, при котрій вимірювальні сигнали часового ходу, що надходять принаймні від одного датчика, такі як сигнали шляху, швидкості, прискорення, сили або тиску, в точці часу виникнення події є вищими або нижчими певного порогового рівня або демонструють іншу характеристичну ознаку. Інакше кажучи, при здійсненні даного способу за допомогою одного датчика або множини датчиків відбувається безперервне вимірювання сигналу, величина якого характеризує коливні властивості контрольованої колісної пари одиниці рухомого складу. Але побудова відповідної частотної характеристики або частотний аналіз при цьому проводиться лише тоді, коли вимірювальний сигнал перевищує певний мінімальний рівень. Шляхом частотного аналізу протягом певного часового інтервалу після точки часу виникнення значущої події і наступного за цим порівняння принаймні з однією еталонною частотною характеристикою стає можливим зробити достовірний висновок щодо наявності змін і дефектів у колісній парі при лише незначних витратах на обчислювальні операції. Якщо, наприклад, в осі колісної пари з'являється тріщина, то динамічна пружність цієї колісної пари зростає, і в результаті вся система "пом'якшується", знижуючи власну частоту коливань, а також, як правило, збільшуючи демпфування. Крім того, зростає пік власної частоти, тобто амплітуда власної частоти на частотній характеристиці. Ці показники форми власних коливань можна спостерігати на побудованій частотній характеристиці при її порівнянні з еталонною частотною характеристикою. Шляхом концентрування уваги на певній поодинокій події, починаючи від заданої мінімальної амплітуди сигналу, що представляє певну вимірювану величину, забезпечується постійне перебування контрольованої колісної пари під дією порівняних граничних умов. Вищезгадану мінімальну величину при цьому вибирають таким чином, щоб можна було розраховувати на достатню кількість значущих подій. При цьому збудження колісної пари невеликої сили, що не породжують її власних коливань, повинні залишатися поза увагою, що дозволяє значно знизити витрати на обчислювання сигналу порівняно з відомими технічними рішеннями. 2 UA 104777 C2 5 10 15 20 25 30 35 40 45 50 55 Подальші кращі вдосконалення і поліпшення даного винаходу, окреслені в п. 1 і п. 12 його формули, несуть з собою заходи, окреслені в залежних пунктах Формули винаходу. Особливо прийнятним як вимірювану величину, що характеризує коливні властивості колісної пари одиниці рухомого складу, використовувати прискорення цієї колісної пари у вертикальному напрямку, а як значущу подію в інтервалі часового ходу прискорення ідентифікувати перевищення вимірюваним прискоренням колісної пари певного мінімального рівня його величини. Зумовлено це тим, що колісна пара при цьому на короткий час втрачає контакт з рейками і може майже вільно коливатися, завдяки чому форма її власних коливань відображається без викривлення, тобто без впливу на жорсткість і демпфування колісної пари з боку контакту з прилеглими конструкціями. Наприклад, наперед заданий мінімальний рівень для 2 величини вертикального прискорення вибирають таким, що складає принаймні 10g (10 м/с ). З таким наперед заданим мінімальним рівнем величини вертикального прискорення для задавання точки часу виникнення події, починаючи від котрої будується і піддається аналізу частотна характеристика або проводиться порівняння її принаймні з однією еталонною частотною характеристикою, можна з високою достовірністю виявляти, зокрема, появу тріщини в колісній парі (колесі і/або осі). Особливо підходящим методом побудови частотної характеристики за часовим ходом вимірювальних сигналів є швидке перетворювання Фур'є (FFT: Fast-Fourier-Transformation). Цей метод дозволяє отримувати достовірні результати при виправданих витратах на обчислювальну обробку даних. Інтервал часу, на який будується частотна характеристика із даних часового ходу вимірювального сигналу, є постійним і може становити, наприклад, від 5 до 500 мс. Такий відносно малий часовий інтервал є достатнім для здійснення інформативного перетворювання Фур'є та одержання інформативної частотної характеристики, із котрої можна визначати такі модальні параметри, як власна частота, амплітуда власної частоти ωe, коефіцієнт демпфування De, а також динамічна жорсткість S (ω) або динамічна пружність N (ω). В іншому варіанті попередньо визначений відтинок часу, на який будують частотну характеристику за даними часового ходу вимірювального сигналу, починається від точки часу виникнення значущої події, а закінчується, коли надходить певна характеристична властивість коливання, наприклад певна величина згасання коливання, або відбувається подальша чи наступна значуща подія. У цьому випадку, хоча часовий інтервал і має визначені початок і кінець, все ж довжина його не є постійно однаковою. Крім того, пропонується як еталонну використовувати очікувану частотну характеристику, отримувану шляхом моделювального обчислювання або на базі типового зразка колісної пари. В альтернативному варіанті еталонна частотна характеристика може отримуватися із числа попередньо побудованих частотних характеристик за кривими часового ходу вимірювальних сигналів у процесі експлуатації одиниці рухомого складу, або визначатися шляхом усереднення множини частотних характеристик контрольованої колісної пари чи множини інших колісних пар. Крім того, для порівняння досліджуваної частотної характеристики можуть використовуватися еталонні частотні характеристики контрольованої колісної пари, побудовані в процесі експлуатації одиниці рухомого складу за кривими часового ходу вимірюваної величини (або величин) для статистичної оцінки протягом тривалого часу. Отримувана таким чином еталонна частотна характеристика колісної пари являє собою щось на зразок характеристичного "відбитка пальців", який для кожної колісної пари визначається, як правило, індивідуально і зберігається для аналітичного порівняння з еталонними даними та подальшого, згідно з отриманими результатами, використання або оцінювання. Всі ці методи є підходящими для одержання даних для еталонної частотної характеристики (або характеристик) шляхом обчислювання або за допомогою статистичного аналізу. Порівняння побудованої частотної характеристики щонайменше з однією еталонною частотною характеристикою здійснюється переважно при використанні щонайменше одного модального параметра, наприклад власної частоти ωe, амплітуди власної частоти ωe, коефіцієнта демпфування De а також пружності N чи жорсткості S. При порівнянні побудованої частотної характеристики принаймні з однією еталонною частотною характеристикою в кращому варіанті враховують вплив фактичного стану зносу колісної пари і фактичне число обертів колісної пари. Це дозволяє ще більше підвищити інформативну достовірність при малих витратах на обробку сигналів. Нижче переваги та особливості даного винаходу розглянуто більш докладно на кращому прикладі його здійснення з посиланнями на додані фігури креслення, де показані: 3 UA 104777 C2 5 10 15 20 25 30 35 40 45 50 55 60 - на Фіг. 1 – структурна блок-схема пристрою для контролю ходового стану одиниці рейкового рухомого складу згідно з одним із кращих прикладів здійснення винаходу; - на Фіг. 2 – крива змінення в часі величини прискорення контрольованої колісної пари одиниці рейкового рухомого складу внаслідок значущої події; - на Фіг. 3 – еталонна частотна характеристика прискорення. Опис прикладу здійснення винаходу В нормальних умовах експлуатації колісні пари одиниці рейкового рухомого складу рухаються котінням по залізничному шляху. В залежності від швидкості руху і стану одиниці рухомого складу колісні пари отримують коливні збудження. Внаслідок цих збуджень виникають коливання колісної пари або її частин. Ці коливання з одного боку є абсолютними у просторі, а з іншого боку відбуваються відносно прилеглих конструкційних елементів або відносно одне одного. Типова колісна пара складається із двох коліс, з'єднаних між собою віссю, як показано на Фіг. 1. Колісна пара 1 одиниці рейкового рухомого складу (остання на кресленні не показана) обладнана датчиком або датчиками 2, які в кращому варіанті є датчиками прискорення й уловлюють прискорення колісної пари 1 або її частини, наприклад у вертикальному напрямку, і видають на своєму виході відповідні вимірювальні сигнали. Шляхом уловлення вимірюваних величин датчиками 2 і передачі їх на блок 3 прийому сигналів будується крива змінення в часі вертикального прискорення колісної пари. Далі блок 3 прийому сигналів ідентифікує так звану "значущу подію" у межах часового інтервалу змінення прискорення, а також реєструє точку t0 часу виникнення даної події. У контексті даного опису "значущою подією" в часовому інтервалі вимірювального сигналу вважається подія, при котрій вимірювана величина або вимірювальний сигнал перевищує певний мінімальний рівень. У випадку, що розглядається, вимірювальні сигнали приймаються до розгляду доти, поки вимірюване вертикальне прискорення перевищує певну мінімальну величину amin або мінімальну амплітуду amin прискорення. Наперед задана величина 2 мінімального прискорення може складати, наприклад, +10 g або -10 g (м/с ). У випадку, що розглядається, значущими поодинокими подіями є максимальне прискорення МАХ1, яке в залежності від того, прискорюється чи уповільнюється рух колісної пари у вертикальному напрямку, буде позитивним або негативним і в сумі перевищувати мінімальну амплітуду a min, як показано на Фіг. 2. Це має місце, наприклад, тоді, коли контрольована колісна пара проходить через стик або нерівномірність рейкового шляху і в результаті отримує вертикальні коливні збудження, що перевищують певний рівень, як показано на Фіг. 2. При достатньо високому наперед заданому мінімальному рівні amin можна виходити з того, що колісна пара 1 буде збуджуватися до достатньо достовірного виявлення гармонічного власного коливання з власною частотою ωe. У відповідності до демпферних властивостей матеріалу та наявності сполучення з прилеглими конструкційними елементами, демпфування викликає згасання амплітуди збудженого власного коливання протягом часу, як показано кривою змінення в часі сигналу прискорення на Фіг. 2, або ж власне коливання знову буде збуджуватися внаслідок виникнення подальшої значущої події. На практиці часовим сигналом може служити будь-яка інша величина або комбінація кількох інших величин, що є підходящими для визначення коливання колісної пари у формі власного коливання у відповідь на стороннє збудження. Вимірюваними величинами, окрім вертикального прискорення, при цьому можуть служити, наприклад, також прискорення в будь-якому іншому напрямку, шлях руху і/або швидкість колісної пари чи її частин. З цією метою можуть використовуватися також динамічні сила чи тиск, що викликають коливання колісної пари, і в разі їх використання можуть вимірятися за допомогою датчиків сили або тиску та представлятися у формі відповідного часового сигналу сили або тиску. Важливим при цьому є лише те, щоб вибрана вимірювана величина або комбінація множини вимірюваних величин дозволяли якомога кращим чином представляти власні коливання контрольованої колісної пари. І нарешті, блок 4 частотного аналізу будує частотну характеристику за кривою змінення в часі сигналу прискорення від точки часу виникнення події і далі протягом певного часового інтервалу ta. Часовий інтервал ta вибирають, як правило, фіксованим, починаючи від точки t 0 часу виникнення події, і може складати, наприклад, від 5 до 500 мс, як показано на Фіг. 2. В альтернативному варіанті часовий інтервал ta, на який будується частотна характеристика за кривою часового ходу вимірювального сигналу, починається в точці t 0 часу виникнення події і закінчується тоді, коли настає певний ступінь згасання коливання, що визначається певною величиною, яка характеризує властивість даного коливання, або триває доти, аж поки не виникне наступна значуща подія. 4 UA 104777 C2 5 10 15 20 25 30 Вищезгадану частотну характеристику можна будувати, наприклад, застосовуючи до часового сигналу метод перетворювання Фур'є. Із цієї частотної характеристики відомим чином можуть визначатися характеристичні величини збудженого значущою подією власного коливання, тобто такі як геометрична форма власного коливання (при наявності в розпорядженні множини датчиків, розподілених по колісній парі), належні до цієї форми власних коливань модальні параметри – власна частота ωe, амплітуда власної частоти ωe, коефіцієнт демпфування De, а також жорсткість Se або пружність Ne. При цьому не потребується визначати всі характеристичні величини власних коливань, а достатніми є лише деякі, взяті окремо серед них. Далі блок 5 проводить порівняння побудованої за часовим сигналом частотної характеристики принаймні з однією еталонною частотною характеристикою, взятою із блоку 7 пам'яті. При цьому еталоном може служити очікувана частотна характеристика, створена шляхом моделювального обчислювання або шляхом обчислювання на основі типового зразка колісної пари, наприклад, методом експериментального модального аналізу. В альтернативному варіанті еталонною частотною характеристикою може служити також частотна характеристика контрольованої колісної пари, побудована заздалегідь за кривими часового ходу вимірюваної величини протягом експлуатації даної одиниці рейкового рухомого складу. Або ж нею може служити усереднена частотна характеристика, створена шляхом усереднення множини частотних характеристик контрольованої колісної пари або множини інших колісних пар. Не виключається також можливість порівняння частотної характеристики, побудованої за кривою часового ходу згідно з Фіг. 2, з багатьма еталонними частотними характеристиками контрольованої колісної пари, побудованими під час попередньої експлуатації одиниці рейкового рухомого складу для статистичної оцінки в часі. Одна з таких еталонних частотних характеристик показана на Фіг. 3. Вона має максимум на частоті приблизно 0,27 кГц, яка являє собою власну частоту ωe колісної пари. Порівняння частотної характеристики, побудованої за величинами, виміряними у процесі експлуатації, з еталонною частотною характеристикою здійснюється переважно принаймні за одним модальним параметром – власною частотою ωe, амплітудою коливань власної частоти ωe, коефіцієнтом демпфування De, а також пружністю Ne або жорсткістю Se. При ударному силовому збудженні колісної пари, яке в ідеальному випадку описується осцилятором одиничної маси m, зв'язаним через пружину жорсткістю с і демпфер, що має коефіцієнт демпфування D, з кузовом вагона, установлюється після перехідного процесу в стаціонарне синусоїдальне коливання з власною частотою c , m e (1) 35 і коефіцієнтом демпфування De d 2 c m , (2) а також динамічною пружністю (що має дійсну та уявну частини) 40 N 45 50 1c 1 j 2 D e e 2 , (3). У тому випадку, якщо цей модальний параметр (або параметри) зазнає (або зазнають) значного відхилення, тобто на мінімальну величину, від відповідної величини еталонної частотної характеристики, то це вказує на наявність дефекту в контрольованій колісній парі і, зокрема, на наявність тріщиноутворення в її осі або колесі. Якщо ж, наприклад, вісь колісної пари має тріщину, то її динамічна пружність N (ω) зростає, внаслідок чого система "пом'якшується", знижуючи власну частоту коливань і збільшуючи коефіцієнт De демпфування порівняно з неушкодженою віссю. Крім того, зростає пік коливань власної частоти ωе, тобто стає більшою амплітуда коливань власної частоти ωе на частотній характеристиці. Величина відхилення характеристичних величин частотної характеристики, побудованої за часовим ходом сигналу, відносно взятої із пам'яті еталонної частотної характеристики 5 UA 104777 C2 5 10 15 20 25 30 35 40 45 50 55 визначається блоком 6 оцінки. При цьому до уваги може братися також вплив фактичного стану зносу колісної пари та її фактичне число обертів. Блок 3 прийому сигналів, блок 4 частотного аналізу, блок 5 порівняння, блок 6 оцінки і блок 7 пам'яті еталонної частотної характеристики можуть бути об'єднані в єдиному пристрої 8 прийому, попередньої обробки сигналів та оцінки, виконаному у формі мікрокомп'ютера. Для побудови усередненої частотної характеристики за частотними характеристиками, побудованими на основі прийнятих попередньо часових сигналів, пристрій 8 прийому, попередньої обробки сигналів та оцінки може включати у себе також блок усереднення (докладно не розглянутий), який би проводив усереднення множини частотних характеристик контрольованої колісної пари або множини інших колісних пар і будував відповідну еталонну частотну характеристику. Позиції на кресленнях 1- Колісна пара 2- Датчик 3- Блок прийому сигналів 4- Блок частотного аналізу 5- Блок порівняння 6- Блок оцінки 7- Блок пам'яті 8- Пристрій 8 прийому, попередньої обробки сигналів та оцінки МАХ1 – Максимальне прискорення ta – Часовий інтервал amin – Мінімальна амплітуда ФОРМУЛА ВИНАХОДУ 1. Спосіб контролю ходового стану одиниці рейкового рухомого складу, де уловлюють принаймні одну вимірювану величину, що характеризує коливні властивості принаймні однієї колісної пари, тобто таку як рух, швидкість або прискорення цієї колісної пари або ж сила, що діє на цю колісну пару, за допомогою принаймні одного датчика (2), котрий видає принаймні один відповідний вимірювальний сигнал, і де зазначений спосіб, який відрізняється тим, що включає наступні стадії: - ідентифікацію принаймні однієї значущої події або комбінації значущих подій у часовому інтервалі вимірювальних сигналів, де вимірювані величини є вищими або нижчими заданого порогового рівня, а також ідентифікацію точки часу виникнення події, в котрій дана подія виникла; - побудову частотної характеристики за кривою часового ходу вимірювального сигналу від точки часу виникнення події, де частотну характеристику будують на певний часовий інтервал (t a) від точки часу виникнення події; - порівняння побудованої частотної характеристики принаймні з однією зафіксованою в пам'яті еталонною частотною характеристикою; - оцінку коливних властивостей даної колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї зафіксованої в пам'яті еталонної частотної характеристики. 2. Спосіб за п. 1, який відрізняється тим, що як вимірювану величину, що характеризує коливні властивості колісної пари, використовують прискорення колісної пари (1) у вертикальному напрямку, причому значущу подію в межах часового ходу прискорення ідентифікують за перевищенням вимірюваним прискоренням колісної пари (1) певної мінімальної величини (a min). 3. Спосіб за п. 2, який відрізняється тим, що сума визначеної мінімальної величини (аmin) вертикального прискорення складає принаймні 10 g. 4. Спосіб за одним із попередніх пунктів, який відрізняється тим, що частотну характеристику будують із часового ходу вимірювального сигналу шляхом швидкого перетворення Фур'є (FFT: Fast-Fourier-Transformation). 5. Спосіб за одним із попередніх пунктів, який відрізняється тим, що визначений часовий інтервал (ta), на котрий будують частотну характеристику за часовим ходом вимірювального сигналу, є завжди фіксованим. 6. Спосіб за одним із пп. 1-5, який відрізняється тим, що визначений часовий інтервал (ta), на котрий будують частотну характеристику за часовим ходом вимірювального сигналу, починається в точці часу виникнення події і закінчується, коли надходить певна 6 UA 104777 C2 5 10 15 20 25 30 35 40 45 50 55 характеристична властивість коливання, наприклад певна величина згасання коливання, або відбувається подальша або наступна значуща подія. 7. Спосіб за одним із попередніх пунктів, який відрізняється тим, що еталонною частотною характеристикою є очікувана частотна характеристика, яку будують шляхом моделювального обчислювання або на базі типового зразка колісної пари. 8. Спосіб за одним із пп. 1-6, який відрізняється тим, що еталонною частотною характеристикою є принаймні одна частотна характеристика, побудована у процесі експлуатації одиниці рейкового рухомого складу за кривими часового ходу вимірюваної величини контрольованої колісної пари (1) або визначена шляхом усереднення множини частотних характеристик контрольованої колісної пари (1), або множини інших колісних пар. 9. Спосіб за п. 8, який відрізняється тим, що частотну характеристику порівнюють з множиною еталонних частотних характеристик контрольованої колісної пари (1), побудованих за кривими часового ходу вимірюваної величини у процесі експлуатації одиниці рейкового рухомого складу для статистичної оцінки протягом тривалого часу. 10. Спосіб за одним із попередніх пунктів, який відрізняється тим, що порівняння побудованої частотної характеристики принаймні з однією еталонною частотною характеристикою здійснюють за допомогою принаймні одного модального параметра, такого як власна частота, коефіцієнт демпфування або пружність. 11. Спосіб за одним із попередніх пунктів, який відрізняється тим, що при порівнянні частотної характеристики принаймні з однією еталонною частотною характеристикою враховують вплив фактичного стану зносу колісної пари і фактичне число обертів колісної пари (1). 12. Пристрій для контролю ходового стану одиниці рейкового рухомого складу, при якому уловлюють принаймні одну вимірювану величину, що характеризує коливні властивості принаймні однієї колісної пари (1), тобто таку як рух, швидкість або прискорення цієї колісної пари, або ж сила, що діє на цю колісну пару, за допомогою принаймні одного датчика (2), який видає принаймні один відповідний вимірювальний сигнал, і де зазначений пристрій відрізняється тим, що пристрій (8) прийому, попередньої обробки сигналів та оцінки, побудований таким чином, що він здійснює принаймні такі стадії: - ідентифікацію принаймні однієї значущої події або комбінації значущих подій у часовому інтервалі вимірювальних сигналів, де вимірювані величини є вищими або нижчими заданого порогового рівня, а також ідентифікацію точки часу виникнення події, в котрій дана подія виникла; - побудову частотної характеристики за кривою часового ходу вимірювального сигналу від точки часу виникнення події, де частотну характеристику будують на певний часовий інтервал (t a) від точки часу виникнення події; - порівняння побудованої частотної характеристики принаймні з однією зафіксованою в пам'яті еталонною частотною характеристикою; - оцінку коливних властивостей даної колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї зафіксованої в пам'яті еталонної частотної характеристики. 13. Пристрій за п. 12, який відрізняється тим, що згаданий пристрій прийому, попередньої обробки сигналів та оцінки, містить принаймні: - блок (3) прийому сигналів, який ідентифікує значущі події в межах часового ходу вимірювальних сигналів, а також приналежні точки часу виникнення подій; - блок (4) частотного аналізу, який будує частотну характеристику із часового ходу вимірювального сигналу від точки часу виникнення події на певний часовий інтервал (t a); - блок (5) порівняння, який служить для порівняння побудованої частотної характеристики принаймні з однією еталонною частотною характеристикою, що зберігається в пам'яті; - блок (6) оцінки, який служить для оцінки коливних властивостей колісної пари в залежності від відхилення побудованої частотної характеристики від принаймні однієї еталонної частотної характеристики, що зберігається в пам'яті. 14. Пристрій за п. 13, який відрізняється тим, що пристрій (8) прийому, попередньої обробки сигналів та оцінки, містить, крім того, блок усереднення, який усереднює множину частотних характеристик контрольованої колісної пари або множини інших колісних пар і за отриманими результатами будує еталонну частотну характеристику. 15. Пристрій за одним із пп. 12-14, який відрізняється тим, що він включає у себе принаймні один датчик (2) для уловлювання прискорення колісної пари (1) у вертикальному напрямку. 7 UA 104777 C2 8 UA 104777 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюGunther, Frank, Wach, Jorg-Johannes, Friesen, Ulf, Sedlmair, Stefan
Автори російськоюГюнтер Франк, Вах Йорг-Йоханнес, Фризен Ульф, Зедлмайр Стефан
МПК / Мітки
МПК: G01M 17/10
Мітки: стану, складу, ходового, одиниці, рухомого, спосіб, пристрій, контролю, рейкового
Код посилання
<a href="https://ua.patents.su/11-104777-sposib-i-pristrijj-dlya-kontrolyu-khodovogo-stanu-odinici-rejjkovogo-rukhomogo-skladu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для контролю ходового стану одиниці рейкового рухомого складу</a>
Осьовий гальмовий диск для одиниці рейкового рухомого складу

Номер патенту: 103900
Опубліковано: 10.12.2013
Автори: Нісснер Маттіас, Лютц Рудольф, Сайферт Петер
МПК: F16D 65/12
Мітки: диск, одиниці, гальмовий, рухомого, осьовий, складу, рейкового
Формула / Реферат:
1. Осьовий гальмовий диск для одиниці рейкового рухомого складу, де зазначений диск має фрикційне кільце (1), закріплене на маточині (2) за допомогою гвинтів (4), які проходять крізь затискне кільце (5), котре прилягає до кріпильних фланців (3), передбачених на внутрішньому колі фрикційного кільця (1), і котре служить опорою для гвинтів (4), і де затискне кільце (5) і маточина (2) сполучаються між собою в замок, при цьому затискне кільце (5)...
Спосіб дистанційного акустичного контролю рейкового рухомого складу під час руху
Номер патенту: 62327
Опубліковано: 25.08.2011
Автори: Візняк Руслан Іванович, Скуріхін Дмитро Ігорович, Бондаренко В'ячеслав Володимирович
Мітки: рухомого, рейкового, спосіб, складу, акустичного, дистанційного, руху, контролю
Формула / Реферат:
Спосіб дистанційного акустичного контролю рейкового рухомого складу під час руху, який відрізняється тим, що замість генерації ультразвукових коливань у об'єкті контролю та приймання віддзеркалених від дефектів сигналів проводять реєстрацію параметрів пружних коливань повітря звукового діапазону від взаємодії у елементах ходових частин та підвагонного обладнання (колесо, буксовий вузол, генератор та його привід) під час рейсу поїзда,...
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу
Номер патенту: 13087
Опубліковано: 15.03.2006
Автори: Осенін Юрій Іванович, Войтенко Галина Олегівна
МПК: B61K 9/00
Мітки: колісних, складу, контролю, пар, технічного, автоматичного, спосіб, стану, рухомого
Формула / Реферат:
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу, згідно з яким в контрольованому виробі, під кутом до його поверхні, збуджують ультразвукові коливання у вигляді нормальних хвиль асиметричної нульової моди за критичним кутом падіння Релея, приймають віддзеркалені від зерен метала та дефектів сигнали і визначають їх величину за результатами порівняння амплітуд віддзеркалених сигналів з еталонним значенням, збуджують...
Спосіб дистанційного акустичного контролю рейкового рухомого складу під час руху
Номер патенту: 95863
Опубліковано: 12.09.2011
Автори: Скуріхін Дмитро Ігорович, Бондаренко В'ячеслав Володимирович, Візняк Руслан Іванович
Мітки: спосіб, дистанційного, контролю, рухомого, руху, акустичного, рейкового, складу
Формула / Реферат:
Спосіб дистанційного акустичного контролю рейкового рухомого складу під час руху, який відрізняється тим, що реєструють параметри пружних коливань повітря звукового діапазону довжин хвиль від взаємодії у елементах ходових частин та підвагонного обладнання, таких як колесо або буксовий вузол, або генератор та його привід під час рейсу поїзда, оцифровувують сигнал, проводять його аналіз за відповідною технологією функціональної діагностики,...
Система дистанційного контролю рейкового рухомого складу під час руху
Номер патенту: 96483
Опубліковано: 10.11.2011
Автори: Скуріхін Дмитро Ігорович, Бондаренко В'ячеслав Володимирович, Візняк Руслан Іванович
Мітки: дистанційного, рейкового, рухомого, система, складу, контролю, руху
Формула / Реферат:
Система дистанційного контролю рейкового рухомого складу під час руху, яка включає пульт керування вагона, АРМ начальника поїзда або машиніста, пристрій бездротового зв'язку з постом віддаленого контролю, яка відрізняється тим, що на вагоні додатково встановлений пристрій акустичного контролю ходових частин та пiдвагонного обладнання, до якого підключені сенсори, які закріплені на кузові вагона знизу, блок живлення від електричної мережі...
Попередній патент: Спосіб дистанційного виявлення персоналу у поглинаючих та екрануючих середовищах
Наступний патент: Футерівка торцевої кришки барабанного млина
Випадковий патент: Гідродинамічний уловлювач свердловинного обладнання