Штрангонапрямний сегмент касетного типу з індивідуальним підведенням роликів
Номер патенту: 106409
Опубліковано: 26.08.2014
Автори: Гуттенбруннер Йозеф, Циглєр Гюнтер, Рамшторфер Франц
Формула / Реферат
1. Штрангонапрямний сегмент (1) для підтримування і направлення металевого штранга зі слябовим поперечним перерізом у штрангонапрямній системі машини безперервного лиття,
- який містить верхню раму (3) і нижню раму (4), причому верхня рама (3) з можливістю рознімання з'єднана з нижньою рамою (4);
- причому кожен із множини штрангонапрямних роликів (5, 6, 7) з'єднаний з верхньою рамою (3) і нижньою рамою (4);
причому в напрямку (2) розливу принаймні два розміщених безпосередньо один за іншим штрангонапрямних ролики (6) виконані з можливістю індивідуального переміщення та індивідуального підведення до штанга, який відрізняється тим, що кожен виконаний із можливістю індивідуального переміщення штрангонапрямний ролик (6) оснащений обоймою (8) ролика, принаймні одним установлювальним пристроєм (9) для переміщення обойми (8) ролика в напрямку (10) підведення перпендикулярно напрямку (2) розливу і лише однією поперечиною (11), розміщеною перпендикулярно до напрямку (2) розливу, причому поперечина (11) з можливістю рознімання сполучена з верхньою рамою (3) або нижньою рамою (4), яка з'єднана з виконаним із можливістю індивідуального переміщення штрангонапрямним роликом (6), причому установлювальний пристрій (9) шарнірно з'єднаний із однієї сторони з поперечиною (11), а з іншої сторони - з обоймою (8) ролика, а виконаний із можливістю індивідуального переміщення штрангонапрямний ролик (6) спирається на обойму (8) ролика з можливістю обертання.
2. Штрангонапрямний сегмент за п. 1, який відрізняється тим, що навпроти виконаного із можливістю індивідуального переміщення штрангонапрямного ролика (6) в підвідному пристрої (10) розміщений нерухомий штрангонапрямний ролик (7).
3. Штрангонапрямний сегмент за п. 1, який відрізняється тим, що навпроти виконаного із можливістю індивідуального переміщення штрангонапрямного ролика (6) в підвідному пристрої (10) розміщений інший виконаний із можливістю переміщення штрангонапрямний ролик (6).
4. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що верхня або нижня рама (3, 4), яка з'єднана з виконаним із можливістю індивідуального переміщення штрангонапрямним роликом (6), утворена двома бічними несучими рамами (12) і поперечинами (11), по одній на кожен виконаний із можливістю переміщення штрангонапрямний ролик (6), причому в бічній несучій рамі (12) для кожного виконаного з можливістю індивідуального переміщення штрангонапрямного ролика (6) передбачений поздовжній напрямний засіб, переважно поздовжній проріз (13), орієнтований в напрямку (10) підведення.
5. Штрангонапрямний сегмент за п. 4, який відрізняється тим, що обойма (8) ролика виконана у формі пластини, причому напрямні елементи (14) для обойми (8) ролика розміщені в поздовжніх напрямних засобах бічних несучих рам (12), переважно в поздовжніх прорізах (13).
6. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що штрангонапрямний ролик (5, 6, 7) спирається на множину опор (15).
7. Штрангонапрямний сегмент за п. 6, який відрізняється тим, що кожна обойма (8) ролика оснащена двома установлювальними пристроями (9), причому кожен установлювальний пристрій (9) в поздовжньому напрямку виконаного з можливістю переміщення штрангонапрямного ролика (6) всередині обох крайніх опор (15) шарнірно приєднаний до обойми (8) ролика.
8. Штрангонапрямний сегмент за будь-яким із пп. 2-7, який відрізняється тим, що поперечина (11) з'єднана з кожною бічною несучою рамою (12) окремим затискним пристроєм (16).
9. Штрангонапрямний сегмент за п. 8, який відрізняється тим, що затискний пристрій (16) оснащений автоматичним пристроєм (24) подачі робочого засобу, виконаним із можливістю автоматичного з'єднання з бічними несучими рамами (12) при з'єднанні поперечини (11).
10. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що установлювальний пристрій (9) виконаний у формі гідравлічного циліндра (17).
11. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що установлювальний пристрій (9) оснащений вимірювачем переміщення для визначення положення підведення та/або вимірювачем зусилля для визначення підвідного зусилля.
12. Штрангонапрямний сегмент за будь-яким із пп. 10-11, який відрізняється тим, що вимірювач зусилля виконаний у формі пристрою для вимірювання гідравлічного тиску принаймні в одній камері гідравлічного циліндра (17).
13. Штрангонапрямний сегмент за будь-яким із пп. 11-12, який відрізняється тим, що регулювальний пристрій (18) з'єднаний з вимірювачем (19) зусилля, вимірювачем (20) переміщення і виконавчим пристроєм (21).
14. Штрангонапрямний сегмент за будь-яким із пп. 11-13, який відрізняється тим, що обойма (8) ролика оснащена принаймні одним упором (22) для вимірювача (20) переміщення.
15. Застосування штрангонапрямного сегмента за будь-яким із попередніх пп. в установці безперервного розливу, оснащеній криволінійною або горизонтальною штрангонапрямною системою, для виготовлення зі сталі штранга, переважно слябового або тонкослябового перерізу.
Текст
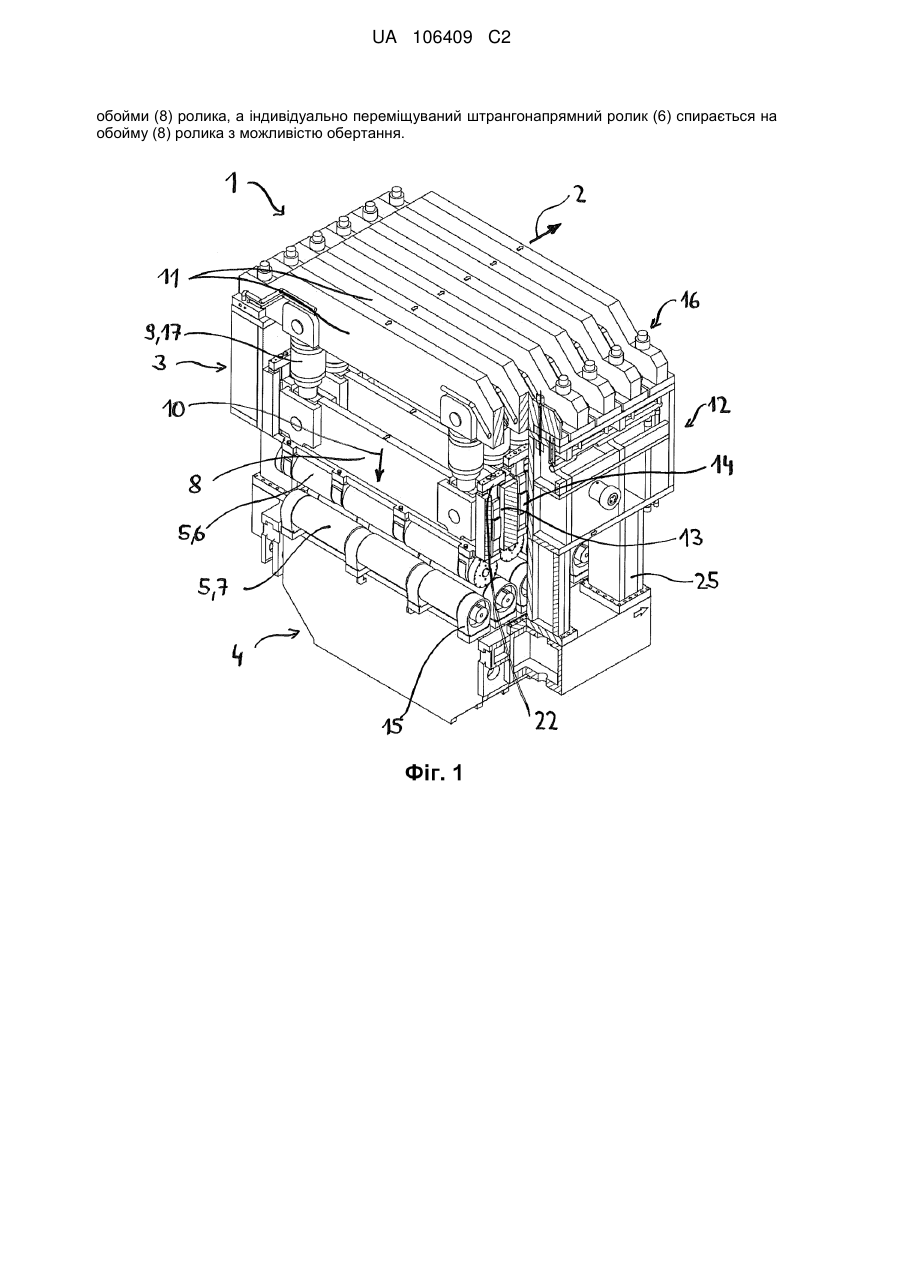
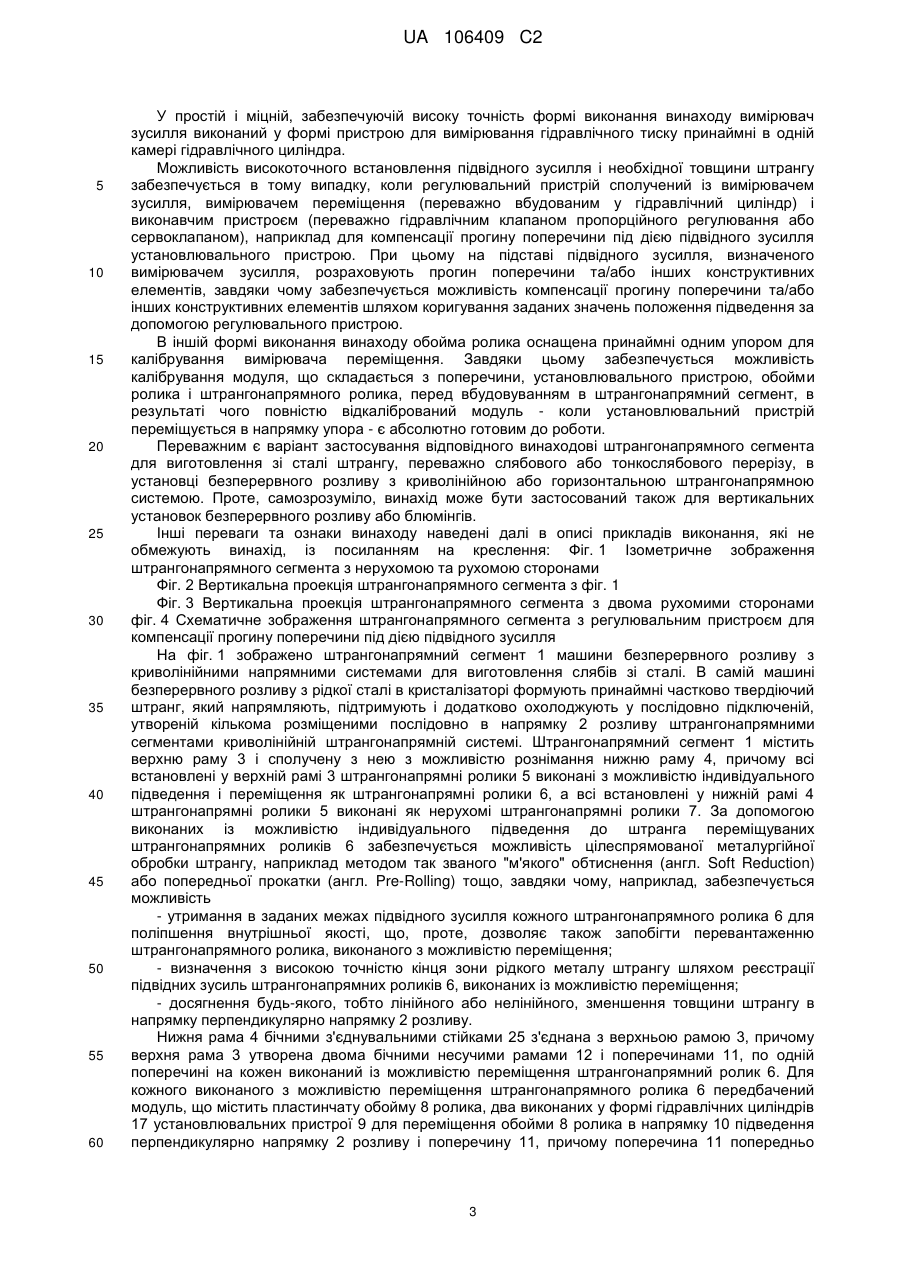
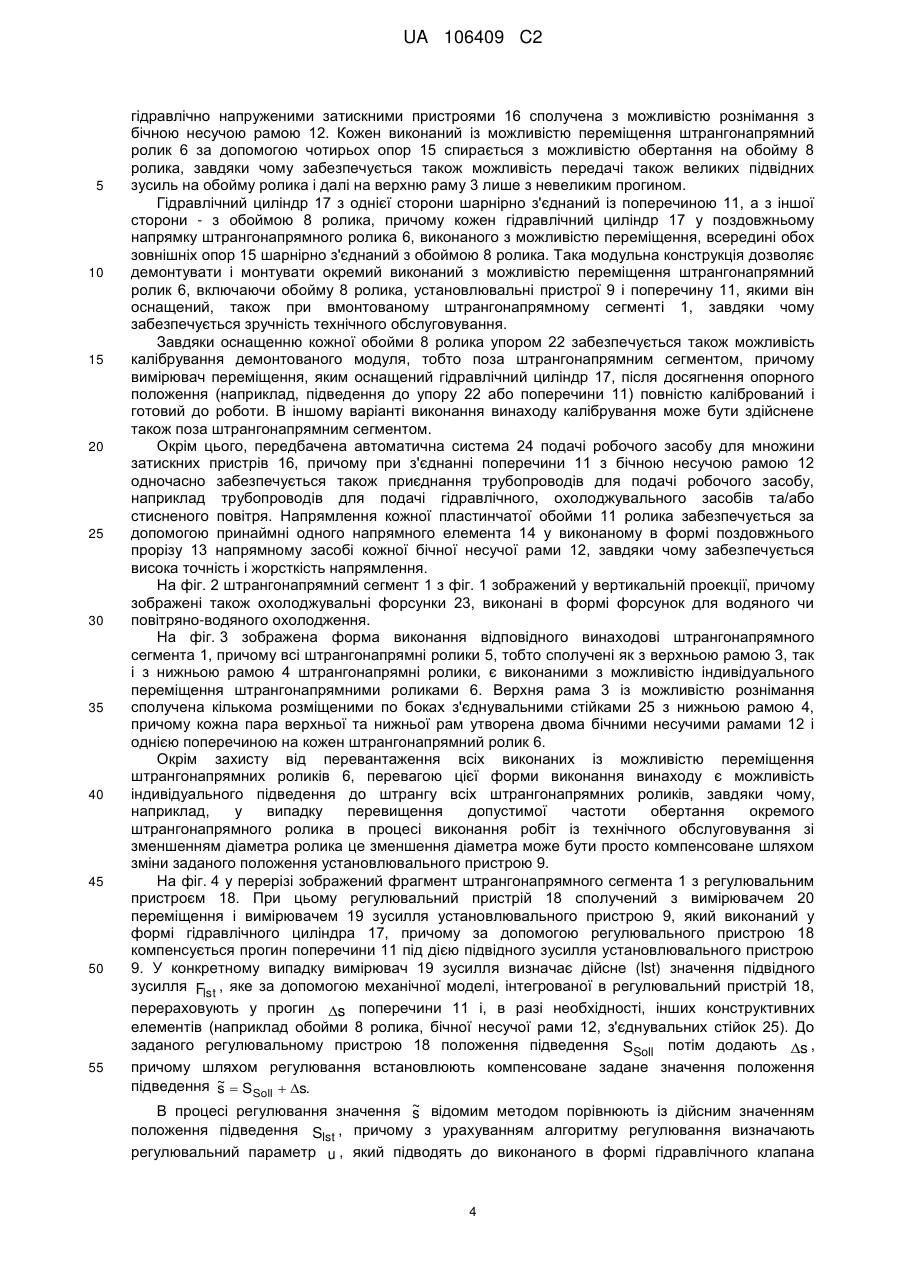
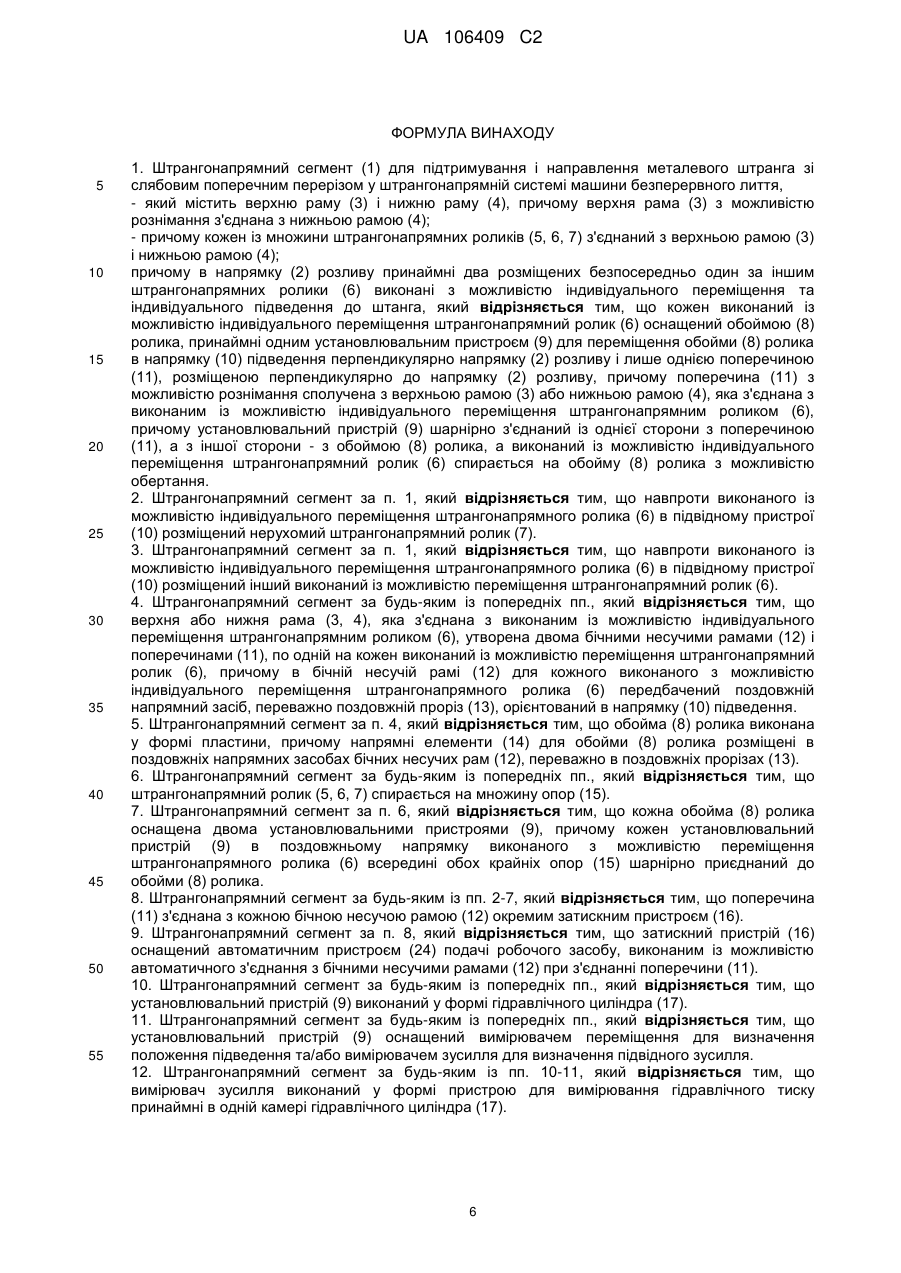
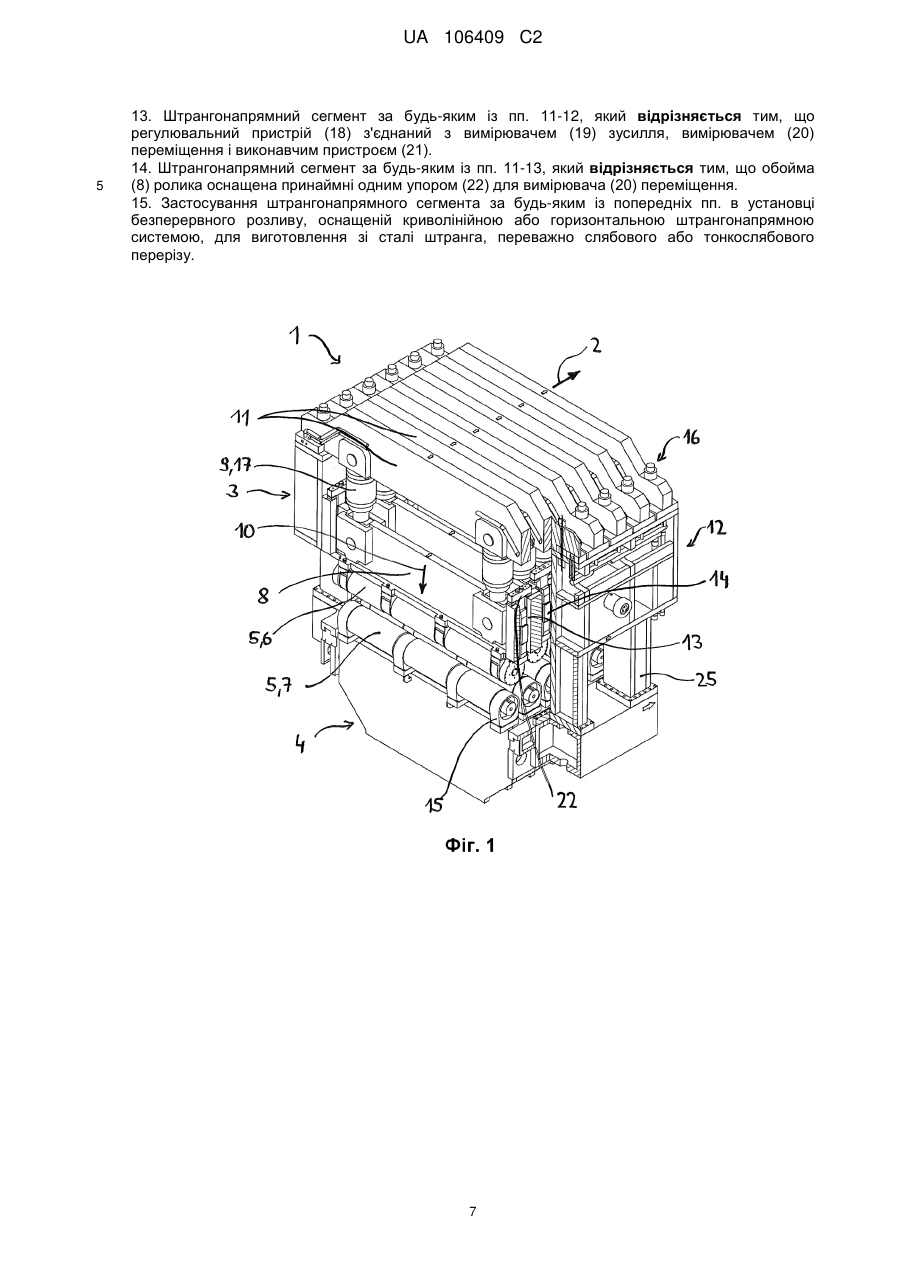
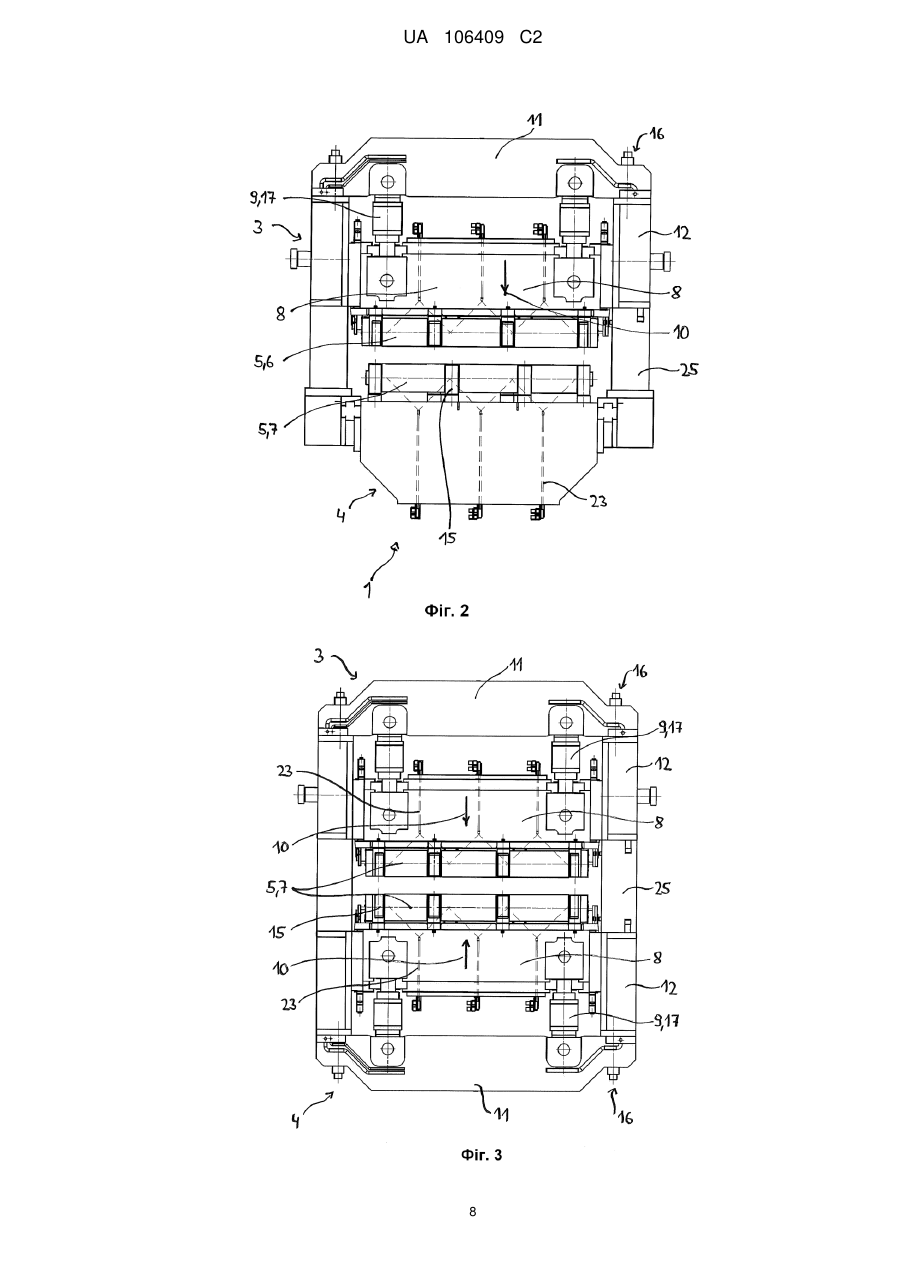
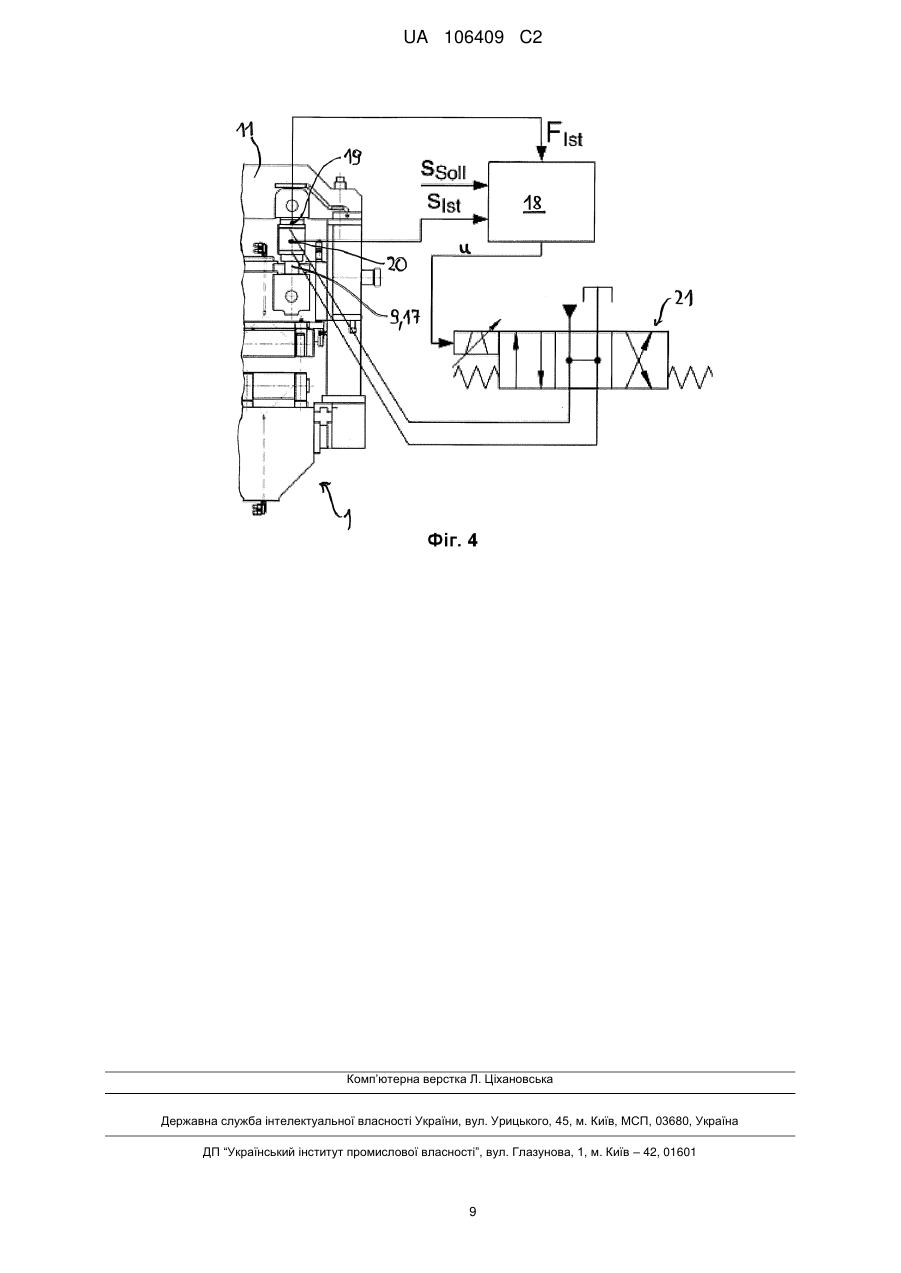
Реферат: Винахід стосується штрангонапрямного сегмента (1) для підтримування і напрямлення металевого штранга слябового перерізу в штрангонапрямній системі машини безперервного розливу, який містить верхню раму (3) і нижню раму (4), причому верхня рама (3) із можливістю рознімання з'єднана з нижньою рамою (4); причому кожен із множини штрангонапрямних роликів (5, 6, 7) з'єднаний із верхньою рамою (3) і нижньою рамою (4); і при цьому в напрямку (2) розливу принаймні два розміщені безпосередньо один за іншим індивідуально переміщувані штрангонапрямних ролики (6) виконані з можливістю індивідуального підведення до штранга. Задачею винаходу є розроблення штрангонапрямного сегмента описаного вище виду, який при змонтованому сегменті дозволяє здійснювати заміну принаймні одного індивідуального переміщуваного штрангонапрямного ролика (6) штрангонапрямного сегмента. Ця задача вирішена у штрангонапрямному сегменті, в якому кожен виконаний із можливістю індивідуального переміщення штрангонапрямний ролик (6), оснащений обоймою (8) ролика, принаймні одним установлювальним пристроєм (9) для переміщення обойми (8) ролика в підвідному пристрої (10) перпендикулярно напрямку (2) розливу і лише однією розміщеною перпендикулярно напрямку (2) розливу поперечиною (11), причому поперечина (11) із можливістю рознімання з'єднана з верхньою або нижньою рамою (3, 4), яка з'єднана з індивідуального переміщуваним штрангонапрямним роликом (6), причому установлювальний пристрій (9) шарнірно приєднаний з однієї сторони до поперечини (11), а з іншої сторони - до UA 106409 C2 (12) UA 106409 C2 обойми (8) ролика, а індивідуально переміщуваний штрангонапрямний ролик (6) спирається на обойму (8) ролика з можливістю обертання. UA 106409 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується штрангонапрямного сегмента для підтримування і напрямлення металевого штрангу зі слябовим поперечним перерізом у штрангонапрямній системі машини безперервного розливу. Предметом винаходу є штрангонапрямний сегмент для підтримування і напрямлення металевого штрангу зі слябовим поперечним перерізом у штрангонапрямній системі машини безперервного розливу, який містить верхню раму та нижню раму, причому верхня рама з можливістю рознімання з'єднана з нижньою рамою; причому кожен із множини штрангонапрямних роликів з'єднаний із верхньою рамою та нижньою рамою; і причому принаймні два розміщених у напрямку розливу безпосередньо один за іншим індивідуально переміщуваних штрангонапрямних ролики виконані з можливістю індивідуального підведення до штрангу. Із публікації DE 27 31 748 відомий штрангонапрямний сегмент із індивідуальним підведенням роликів, в якому принаймні дві розміщених послідовно одна за одною пари штрангонапрямних роликів виконані з можливістю індивідуального, тобто незалежно один від одного, підведення до штрангу. У цьому рішенні два установлювальних пристрої з однієї сторони сполучені з нижньою рамою, а з іншої сторони - з верхньою рамою, внаслідок чого при демонтажі штрангонапрямного ролика, виконаного з можливістю переміщення, спочатку доводиться вручну від'єднувати установлювальні пристрої від верхньої рами, а потім - верхню раму від нижньої. Крім цього, від'єднувати верхню раму від нижньої необхідно також при демонтажі нерухомого штрангонапрямного ролика. Таким чином, у зв'язку з обмеженим простором в штрангонапрямній системі установки безперервного розливу заміна окремого штрангонапрямного ролика при вбудованому штрангонапрямному сегменті є неможливою, що негативно впливає на ремонтопридатність і вартість технічного обслуговування сегмента. Задачею винаходу є розроблення штрангонапрямного сегмента вищевказаного типу, який дозволяє при вмонтованому сегменті здійснювати окрему заміну принаймні одного, переважно кожного виконаного з можливістю переміщення штрангонапрямного ролика штрангонапрямного сегмента. Завдяки цьому підвищується зручність технічного обслуговування штрангонапрямного сегмента. Цю задачу вирішено у штрангонапрямному сегменті, в якому кожен виконаний з можливістю індивідуального переміщення штрангонапрямний ролик оснащений обоймою ролика, принаймні одним установлювальним пристроєм для переміщення обойми ролика в напрямку підведення перпендикулярно напрямку розливу і лише однією поперечиною, орієнтованою перпендикулярно напрямку розливу, причому поперечина з можливістю рознімання з'єднана з верхньою чи нижньою рамою, яка сполучена з виконаним із можливістю індивідуального переміщення штрангонапрямним роликом, причому установлювальний пристрій шарнірно з'єднаний із однієї сторони з поперечиною, а з іншої сторони - з обоймою ролика, а виконаний із можливістю індивідуального переміщення штрангонапрямний ролик спирається на обойму ролика з можливістю обертання. При цьому в модульній конструкції кожен виконаний із можливістю індивідуального переміщення штрангонапрямний ролик оснащений обоймою ролика, принаймні одним установлювальним пристроєм і лише однією орієнтованою перпендикулярно напрямку розливу поперечиною, завдяки чому при монтажі та демонтажі забезпечується можливість підведення цих конструктивних елементів як модульних компонентів до штрангонапрямного сегмента чи виймання з нього. Сама поперечина з можливістю рознімання з'єднана з рамою, а саме з верхньою або нижньою рамою, що з'єднана з виконаним з можливістю індивідуального переміщення штрангонапрямним роликом. Ця конструкція забезпечує можливість дуже простого і швидкого монтажу та демонтажу виконаного з можливістю переміщення штрангонапрямного ролика, включаючи підвідні пристрої, оскільки в конкретному випадку необхідно від'єднувати від рами лише поперечину, а потім можна виймати цю поперечину разом із установлювальними пристроями, обоймою ролика і самим штрангонапрямним роликом із рами, завдяки чому виконаний із можливістю переміщення штрангонапрямний ролик може бути вмонтований в штрангонапрямну систему або демонтований із неї також і при вбудованому сегменті. У простій формі виконання винаходу навпроти виконаного із можливістю індивідуального переміщення штрангонапрямного ролика в напрямку підведення розміщений нерухомий штрангонапрямний ролик. Згідно з цією формою виконання винаходу в типовому випадку в установках безперервного лиття криволінійного типу всі штрангонапрямні ролики нижньої рами (називаної також зовнішньою рамою) належать нерухомій стороні, тобто ці штрангонапрямні ролики виконані без можливості переміщення, а всі штрангонапрямні ролики верхньої рами (називаної також внутрішньою рамою) належать рухомій стороні, тобто ці штрангонапрямні ролики виконані з можливістю індивідуального переміщення. 1 UA 106409 C2 5 10 15 20 25 30 35 40 45 50 55 У переважній формі виконання винаходу навпроти виконаного з можливістю індивідуального переміщення штрангонапрямного ролика в напрямку підведення розміщений інший виконаний із можливістю індивідуального переміщення штрангонапрямний ролик. У типовому випадку всі штрангонапрямні ролики верхньої рами та всі штрангонапрямні ролики нижньої рами належать відповідній рухомій стороні, тобто всі штрангонапрямні ролики виконані з можливістю індивідуального переміщення. Ця форма виконання винаходу потребує більших конструктивних витрат, але забезпечує можливість індивідуального демонтажу всіх штрангонапрямних роликів. Окрім можливості індивідуальної заміни всіх штрангонапрямних роликів, інша перевага цієї форми виконання винаходу полягає в тому, що всі штрангонапрямні ролики виконані з можливістю індивідуального підведення до штрангу, завдяки чому, наприклад, може бути просто компенсоване перевищення допустимої частоти обертання робочої поверхні одного чи кількох штрангонапрямних роликів і пов'язане з цим зменшення діаметра. У рамках обох описаних вище форм виконання винаходу "навпроти" слід розуміти так, що два розміщені один навпроти одного штрангонапрямних ролика зміщені один відносно одного в напрямку товщини штрангу, причому штрангонапрямні ролики в разі потреби можуть бути зміщені також аксіально в напрямку розливу. В одній із форм виконання винаходу верхня або нижня рама, яка з'єднана з виконаним із можливістю індивідуального переміщення штрангонапрямним роликом, утворена двома бічними несучими рамами і містить по одній поперечині для кожного штрангонапрямного ролика, причому бічна несуча рама оснащена окремим напрямним засобом для поздовжнього переміщення кожного виконаного з можливістю індивідуального переміщення штрангонапрямного ролика, переважно поздовжнім прорізом, виконаним у напрямку підведення. У простій формі виконання винаходу обойма ролика виконана в формі пластини, причому для напрямлення обойми ролика використовують напрямні елементи у напрямних засобах для поздовжнього переміщення, переважно поздовжніх прорізах, бічних несучих рам. Завдяки цьому забезпечується можливість простого напрямлення обойми ролика, а потім штрангонапрямного ролика, що позитивно впливає на точність напрямлення штрангонапрямного ролика. В іншій формі виконання винаходу штрангонапрямний ролик спирається на множину опор, наприклад на обоймі ролика або на нижній рамі, завдяки чому забезпечується також можливість передачі великих підтримувальних чи підвідних зусиль від ролика при лише незначному прогині. У переважній формі виконання винаходу кожна обойма ролика оснащена двома установлювальними пристроями, причому кожен установлювальний пристрій у поздовжньому напрямку виконаного з можливістю переміщення штрангонапрямного ролика всередині обох крайніх опор шарнірно приєднаний до обойми ролика. Ця форма виконання винаходу забезпечує можливість, по-перше, установлення різних заданих положень чи зусиль підведення ліворуч і праворуч, по-друге - ефективної передачі підтримувальних чи підвідних зусиль від обойми ролика установлювальним пристроям. Завдяки цьому можна забезпечити також, щоб прорізи для ролика ліворуч і праворуч відповідали однаковим або різним заданим значенням. Проте, самозрозуміло, існує можливість шарнірного приєднання двох установлювальних пристроїв до обойми роликів в поздовжньому напрямку переміщуваних штрангонапрямних роликів поза обома крайніми опорами. Окрім цього, одна з форм виконання винаходу забезпечує можливість оснащення кожної обойми ролика установлювальним пристроєм, який розміщують по центру на обоймі ролика. У переважній формі виконання винаходу передбачене з'єднання поперечини з кожною з бічних несучих рам за допомогою затискного, переважно гідравлічного, пристрою, що дозволяє зменшити витрати часу на заміну поперечини. У переважній формі виконання винаходу затискний пристрій оснащений пристроєм автоматичної подачі робочого засобу, виконаним із можливістю автоматичного з'єднання з однією чи кількома бічними несучими рамами при приєднанні поперечини, завдяки чому забезпечується можливість автоматизованого (тобто без виконання операцій вручну) приєднання або від'єднання трубопроводів для подачі робочого засобу, що дозволяє додатково скоротити час, необхідний для заміни поперечини. В одній із форм виконання винаходу установлювальний пристрій виконаний у формі гідравлічного циліндра. Переважним є варіант, в якому установлювальний пристрій оснащений вимірювачем переміщення для визначення положення підведення та/або вимірювачем зусилля для визначення підвідного зусилля. 2 UA 106409 C2 5 10 15 20 25 30 35 40 45 50 55 60 У простій і міцній, забезпечуючій високу точність формі виконання винаходу вимірювач зусилля виконаний у формі пристрою для вимірювання гідравлічного тиску принаймні в одній камері гідравлічного циліндра. Можливість високоточного встановлення підвідного зусилля і необхідної товщини штрангу забезпечується в тому випадку, коли регулювальний пристрій сполучений із вимірювачем зусилля, вимірювачем переміщення (переважно вбудованим у гідравлічний циліндр) і виконавчим пристроєм (переважно гідравлічним клапаном пропорційного регулювання або сервоклапаном), наприклад для компенсації прогину поперечини під дією підвідного зусилля установлювального пристрою. При цьому на підставі підвідного зусилля, визначеного вимірювачем зусилля, розраховують прогин поперечини та/або інших конструктивних елементів, завдяки чому забезпечується можливість компенсації прогину поперечини та/або інших конструктивних елементів шляхом коригування заданих значень положення підведення за допомогою регулювального пристрою. В іншій формі виконання винаходу обойма ролика оснащена принаймні одним упором для калібрування вимірювача переміщення. Завдяки цьому забезпечується можливість калібрування модуля, що складається з поперечини, установлювального пристрою, обойми ролика і штрангонапрямного ролика, перед вбудовуванням в штрангонапрямний сегмент, в результаті чого повністю відкалібрований модуль - коли установлювальний пристрій переміщується в напрямку упора - є абсолютно готовим до роботи. Переважним є варіант застосування відповідного винаходові штрангонапрямного сегмента для виготовлення зі сталі штрангу, переважно слябового або тонкослябового перерізу, в установці безперервного розливу з криволінійною або горизонтальною штрангонапрямною системою. Проте, самозрозуміло, винахід може бути застосований також для вертикальних установок безперервного розливу або блюмінгів. Інші переваги та ознаки винаходу наведені далі в описі прикладів виконання, які не обмежують винахід, із посиланням на креслення: Фіг. 1 Ізометричне зображення штрангонапрямного сегмента з нерухомою та рухомою сторонами Фіг. 2 Вертикальна проекція штрангонапрямного сегмента з фіг. 1 Фіг. 3 Вертикальна проекція штрангонапрямного сегмента з двома рухомими сторонами фіг. 4 Схематичне зображення штрангонапрямного сегмента з регулювальним пристроєм для компенсації прогину поперечини під дією підвідного зусилля На фіг. 1 зображено штрангонапрямний сегмент 1 машини безперервного розливу з криволінійними напрямними системами для виготовлення слябів зі сталі. В самій машині безперервного розливу з рідкої сталі в кристалізаторі формують принаймні частково твердіючий штранг, який напрямляють, підтримують і додатково охолоджують у послідовно підключеній, утвореній кількома розміщеними послідовно в напрямку 2 розливу штрангонапрямними сегментами криволінійній штрангонапрямній системі. Штрангонапрямний сегмент 1 містить верхню раму 3 і сполучену з нею з можливістю рознімання нижню раму 4, причому всі встановлені у верхній рамі 3 штрангонапрямні ролики 5 виконані з можливістю індивідуального підведення і переміщення як штрангонапрямні ролики 6, а всі встановлені у нижній рамі 4 штрангонапрямні ролики 5 виконані як нерухомі штрангонапрямні ролики 7. За допомогою виконаних із можливістю індивідуального підведення до штранга переміщуваних штрангонапрямних роликів 6 забезпечується можливість цілеспрямованої металургійної обробки штрангу, наприклад методом так званого "м'якого" обтиснення (англ. Soft Reduction) або попередньої прокатки (англ. Pre-Rolling) тощо, завдяки чому, наприклад, забезпечується можливість - утримання в заданих межах підвідного зусилля кожного штрангонапрямного ролика 6 для поліпшення внутрішньої якості, що, проте, дозволяє також запобігти перевантаженню штрангонапрямного ролика, виконаного з можливістю переміщення; - визначення з високою точністю кінця зони рідкого металу штрангу шляхом реєстрації підвідних зусиль штрангонапрямних роликів 6, виконаних із можливістю переміщення; - досягнення будь-якого, тобто лінійного або нелінійного, зменшення товщини штрангу в напрямку перпендикулярно напрямку 2 розливу. Нижня рама 4 бічними з'єднувальними стійками 25 з'єднана з верхньою рамою 3, причому верхня рама 3 утворена двома бічними несучими рамами 12 і поперечинами 11, по одній поперечині на кожен виконаний із можливістю переміщення штрангонапрямний ролик 6. Для кожного виконаного з можливістю переміщення штрангонапрямного ролика 6 передбачений модуль, що містить пластинчату обойму 8 ролика, два виконаних у формі гідравлічних циліндрів 17 установлювальних пристрої 9 для переміщення обойми 8 ролика в напрямку 10 підведення перпендикулярно напрямку 2 розливу і поперечину 11, причому поперечина 11 попередньо 3 UA 106409 C2 5 10 15 20 25 30 35 40 45 50 55 гідравлічно напруженими затискними пристроями 16 сполучена з можливістю рознімання з бічною несучою рамою 12. Кожен виконаний із можливістю переміщення штрангонапрямний ролик 6 за допомогою чотирьох опор 15 спирається з можливістю обертання на обойму 8 ролика, завдяки чому забезпечується також можливість передачі також великих підвідних зусиль на обойму ролика і далі на верхню раму 3 лише з невеликим прогином. Гідравлічний циліндр 17 з однієї сторони шарнірно з'єднаний із поперечиною 11, а з іншої сторони - з обоймою 8 ролика, причому кожен гідравлічний циліндр 17 у поздовжньому напрямку штрангонапрямного ролика 6, виконаного з можливістю переміщення, всередині обох зовнішніх опор 15 шарнірно з'єднаний з обоймою 8 ролика. Така модульна конструкція дозволяє демонтувати і монтувати окремий виконаний з можливістю переміщення штрангонапрямний ролик 6, включаючи обойму 8 ролика, установлювальні пристрої 9 і поперечину 11, якими він оснащений, також при вмонтованому штрангонапрямному сегменті 1, завдяки чому забезпечується зручність технічного обслуговування. Завдяки оснащенню кожної обойми 8 ролика упором 22 забезпечується також можливість калібрування демонтованого модуля, тобто поза штрангонапрямним сегментом, причому вимірювач переміщення, яким оснащений гідравлічний циліндр 17, після досягнення опорного положення (наприклад, підведення до упору 22 або поперечини 11) повністю калібрований і готовий до роботи. В іншому варіанті виконання винаходу калібрування може бути здійснене також поза штрангонапрямним сегментом. Окрім цього, передбачена автоматична система 24 подачі робочого засобу для множини затискних пристрів 16, причому при з'єднанні поперечини 11 з бічною несучою рамою 12 одночасно забезпечується також приєднання трубопроводів для подачі робочого засобу, наприклад трубопроводів для подачі гідравлічного, охолоджувального засобів та/або стисненого повітря. Напрямлення кожної пластинчатої обойми 11 ролика забезпечується за допомогою принаймні одного напрямного елемента 14 у виконаному в формі поздовжнього прорізу 13 напрямному засобі кожної бічної несучої рами 12, завдяки чому забезпечується висока точність і жорсткість напрямлення. На фіг. 2 штрангонапрямний сегмент 1 з фіг. 1 зображений у вертикальній проекції, причому зображені також охолоджувальні форсунки 23, виконані в формі форсунок для водяного чи повітряно-водяного охолодження. На фіг. 3 зображена форма виконання відповідного винаходові штрангонапрямного сегмента 1, причому всі штрангонапрямні ролики 5, тобто сполучені як з верхньою рамою 3, так і з нижньою рамою 4 штрангонапрямні ролики, є виконаними з можливістю індивідуального переміщення штрангонапрямними роликами 6. Верхня рама 3 із можливістю рознімання сполучена кількома розміщеними по боках з'єднувальними стійками 25 з нижньою рамою 4, причому кожна пара верхньої та нижньої рам утворена двома бічними несучими рамами 12 і однією поперечиною на кожен штрангонапрямний ролик 6. Окрім захисту від перевантаження всіх виконаних із можливістю переміщення штрангонапрямних роликів 6, перевагою цієї форми виконання винаходу є можливість індивідуального підведення до штрангу всіх штрангонапрямних роликів, завдяки чому, наприклад, у випадку перевищення допустимої частоти обертання окремого штрангонапрямного ролика в процесі виконання робіт із технічного обслуговування зі зменшенням діаметра ролика це зменшення діаметра може бути просто компенсоване шляхом зміни заданого положення установлювального пристрою 9. На фіг. 4 у перерізі зображений фрагмент штрангонапрямного сегмента 1 з регулювальним пристроєм 18. При цьому регулювальний пристрій 18 сполучений з вимірювачем 20 переміщення і вимірювачем 19 зусилля установлювального пристрою 9, який виконаний у формі гідравлічного циліндра 17, причому за допомогою регулювального пристрою 18 компенсується прогин поперечини 11 під дією підвідного зусилля установлювального пристрою 9. У конкретному випадку вимірювач 19 зусилля визначає дійсне (lst) значення підвідного зусилля Flst , яке за допомогою механічної моделі, інтегрованої в регулювальний пристрій 18, перераховують у прогин s поперечини 11 і, в разі необхідності, інших конструктивних елементів (наприклад обойми 8 ролика, бічної несучої рами 12, з'єднувальних стійок 25). До заданого регулювальному пристрою 18 положення підведення SSoll потім додають s , причому шляхом регулювання встановлюють компенсоване задане значення положення підведення ~ SSoll s. s В процесі регулювання значення ~ відомим методом порівнюють із дійсним значенням s положення підведення Slst , причому з урахуванням алгоритму регулювання визначають регулювальний параметр u , який підводять до виконаного в формі гідравлічного клапана 4 UA 106409 C2 5 10 15 20 25 30 35 40 45 50 виконавчого пристрою 21, в результаті чого значення Slst якнайточніше відповідає значенню ~ . s У конкретному випадку при компенсації положення підведення під дією підвідного зусилля штрангонапрямного ролика, виконаного з можливістю переміщення, здійснюють такі стадії способу: - реєстрація принаймні одного дійсного значення положення підведення Slst за допомогою вимірювача 20 переміщення; - реєстрація принаймні одного дійсного значення підвідного зусилля Flst за допомогою вимірювача 19 зусилля, причому вимірювачем 20 переміщення і вимірювачем 19 оснащений установлювальний пристрій 9 штрангонапрямного ролика 6, виконаного з можливістю переміщення; - передавання заданого значення положення підведення SSoll , дійсного значення положення підведення Slst та дійсного значення підвідного зусилля Flst на регулювальний пристрій 18; - визначення відхилення заданого значення (наприклад прогину поперечини 11) положення підведення s під дією підвідного зусилля з урахуванням механічної моделі (наприклад прогину балки); - розрахунок компенсованого заданого значення положення підведення ~ SSoll s ; s - визначення регулювального параметра u за допомогою регулювального пристрою 18 із урахуванням компенсованого заданого значення положення підведення ~ та дійсного значення s положення підведення Slst із застосуванням алгоритму регулювання; та - навантаження одного з підпорядкованих установлювальному пристрою 9 виконавчих пристроїв 21 регулювальним параметром u , завдяки чому дійсне значення положення підведення Slst якнайближче відповідає компенсованому заданому значенню положення підведення ~ . s Позиційні позначення 1 штрангонапрямний сегмент 2 напрямок розливу 3 верхня рама 4 нижня рама 5 штрангонапрямний ролик 6 штрангонапрямний ролик, виконаний із можливістю індивідуального переміщення 7 нерухомий штрангонапрямний ролик 8 обойма ролика 9 установлювальний пристрій 10 підвідний пристрій 11 поперечина 12 бічна несуча рама 13 поздовжній проріз 14 напрямний елемент 15 опора 16 затискний пристрій 17 гідравлічний циліндр 18 регулювальний пристрій 19 вимірювач зусилля 20 вимірювач переміщення 21 виконавчий пристрій 22 упор 23 охолоджувальна форсунка 24 автоматична система подачі робочого засобу 25 з'єднувальна стійка u регулювальний параметр SSoll задане значення положення підведення Slst дійсне значення положення підведення Flst дійсне значення підвідного зусилля 55 5 UA 106409 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Штрангонапрямний сегмент (1) для підтримування і направлення металевого штранга зі слябовим поперечним перерізом у штрангонапрямній системі машини безперервного лиття, - який містить верхню раму (3) і нижню раму (4), причому верхня рама (3) з можливістю рознімання з'єднана з нижньою рамою (4); - причому кожен із множини штрангонапрямних роликів (5, 6, 7) з'єднаний з верхньою рамою (3) і нижньою рамою (4); причому в напрямку (2) розливу принаймні два розміщених безпосередньо один за іншим штрангонапрямних ролики (6) виконані з можливістю індивідуального переміщення та індивідуального підведення до штанга, який відрізняється тим, що кожен виконаний із можливістю індивідуального переміщення штрангонапрямний ролик (6) оснащений обоймою (8) ролика, принаймні одним установлювальним пристроєм (9) для переміщення обойми (8) ролика в напрямку (10) підведення перпендикулярно напрямку (2) розливу і лише однією поперечиною (11), розміщеною перпендикулярно до напрямку (2) розливу, причому поперечина (11) з можливістю рознімання сполучена з верхньою рамою (3) або нижньою рамою (4), яка з'єднана з виконаним із можливістю індивідуального переміщення штрангонапрямним роликом (6), причому установлювальний пристрій (9) шарнірно з'єднаний із однієї сторони з поперечиною (11), а з іншої сторони - з обоймою (8) ролика, а виконаний із можливістю індивідуального переміщення штрангонапрямний ролик (6) спирається на обойму (8) ролика з можливістю обертання. 2. Штрангонапрямний сегмент за п. 1, який відрізняється тим, що навпроти виконаного із можливістю індивідуального переміщення штрангонапрямного ролика (6) в підвідному пристрої (10) розміщений нерухомий штрангонапрямний ролик (7). 3. Штрангонапрямний сегмент за п. 1, який відрізняється тим, що навпроти виконаного із можливістю індивідуального переміщення штрангонапрямного ролика (6) в підвідному пристрої (10) розміщений інший виконаний із можливістю переміщення штрангонапрямний ролик (6). 4. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що верхня або нижня рама (3, 4), яка з'єднана з виконаним із можливістю індивідуального переміщення штрангонапрямним роликом (6), утворена двома бічними несучими рамами (12) і поперечинами (11), по одній на кожен виконаний із можливістю переміщення штрангонапрямний ролик (6), причому в бічній несучій рамі (12) для кожного виконаного з можливістю індивідуального переміщення штрангонапрямного ролика (6) передбачений поздовжній напрямний засіб, переважно поздовжній проріз (13), орієнтований в напрямку (10) підведення. 5. Штрангонапрямний сегмент за п. 4, який відрізняється тим, що обойма (8) ролика виконана у формі пластини, причому напрямні елементи (14) для обойми (8) ролика розміщені в поздовжніх напрямних засобах бічних несучих рам (12), переважно в поздовжніх прорізах (13). 6. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що штрангонапрямний ролик (5, 6, 7) спирається на множину опор (15). 7. Штрангонапрямний сегмент за п. 6, який відрізняється тим, що кожна обойма (8) ролика оснащена двома установлювальними пристроями (9), причому кожен установлювальний пристрій (9) в поздовжньому напрямку виконаного з можливістю переміщення штрангонапрямного ролика (6) всередині обох крайніх опор (15) шарнірно приєднаний до обойми (8) ролика. 8. Штрангонапрямний сегмент за будь-яким із пп. 2-7, який відрізняється тим, що поперечина (11) з'єднана з кожною бічною несучою рамою (12) окремим затискним пристроєм (16). 9. Штрангонапрямний сегмент за п. 8, який відрізняється тим, що затискний пристрій (16) оснащений автоматичним пристроєм (24) подачі робочого засобу, виконаним із можливістю автоматичного з'єднання з бічними несучими рамами (12) при з'єднанні поперечини (11). 10. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що установлювальний пристрій (9) виконаний у формі гідравлічного циліндра (17). 11. Штрангонапрямний сегмент за будь-яким із попередніх пп., який відрізняється тим, що установлювальний пристрій (9) оснащений вимірювачем переміщення для визначення положення підведення та/або вимірювачем зусилля для визначення підвідного зусилля. 12. Штрангонапрямний сегмент за будь-яким із пп. 10-11, який відрізняється тим, що вимірювач зусилля виконаний у формі пристрою для вимірювання гідравлічного тиску принаймні в одній камері гідравлічного циліндра (17). 6 UA 106409 C2 5 13. Штрангонапрямний сегмент за будь-яким із пп. 11-12, який відрізняється тим, що регулювальний пристрій (18) з'єднаний з вимірювачем (19) зусилля, вимірювачем (20) переміщення і виконавчим пристроєм (21). 14. Штрангонапрямний сегмент за будь-яким із пп. 11-13, який відрізняється тим, що обойма (8) ролика оснащена принаймні одним упором (22) для вимірювача (20) переміщення. 15. Застосування штрангонапрямного сегмента за будь-яким із попередніх пп. в установці безперервного розливу, оснащеній криволінійною або горизонтальною штрангонапрямною системою, для виготовлення зі сталі штранга, переважно слябового або тонкослябового перерізу. 7 UA 106409 C2 8 UA 106409 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюRod guide segment in cassette design having single roll engagement
Автори англійськоюGuttenbrunner, Josef, Ziegler, Gunter, Ramstorfer, Franz
Автори російськоюГуттенбруннер Йозеф, Циглер Гюнтер, Рамшторфер Франц
МПК / Мітки
МПК: B22D 11/12, B22D 11/128
Мітки: касетного, роликів, штрангонапрямний, типу, індивідуальним, сегмент, підведенням
Код посилання
<a href="https://ua.patents.su/11-106409-shtrangonapryamnijj-segment-kasetnogo-tipu-z-individualnim-pidvedennyam-rolikiv.html" target="_blank" rel="follow" title="База патентів України">Штрангонапрямний сегмент касетного типу з індивідуальним підведенням роликів</a>
Зерносушильна установка касетного типу
Номер патенту: 10346
Опубліковано: 15.11.2005
Автори: Скриннік Іван Олександрович, Петренко Микола Миколайович
МПК: F26B 3/00, F26B 17/00
Мітки: касетного, установка, типу, зерносушильна
Формула / Реферат:
Зерносушильна установка касетного типу, що містить теплогенератор, завантажувальний бункер, сушильну камеру, жалюзійну сітку, шнек, трубу, норію, охолоджуючу камеру, труби, вентилятор, яка відрізняється тим, що вона має осаджувальну камеру для виділення легких фракцій зерна та домішок, яка розташована збоку у верхній частині сушильної камери, патрубок для попереднього підігріву зерна, котрий приєднується від теплогенератора до...
Пиловловлювач металопористий високотемпературний касетного типу
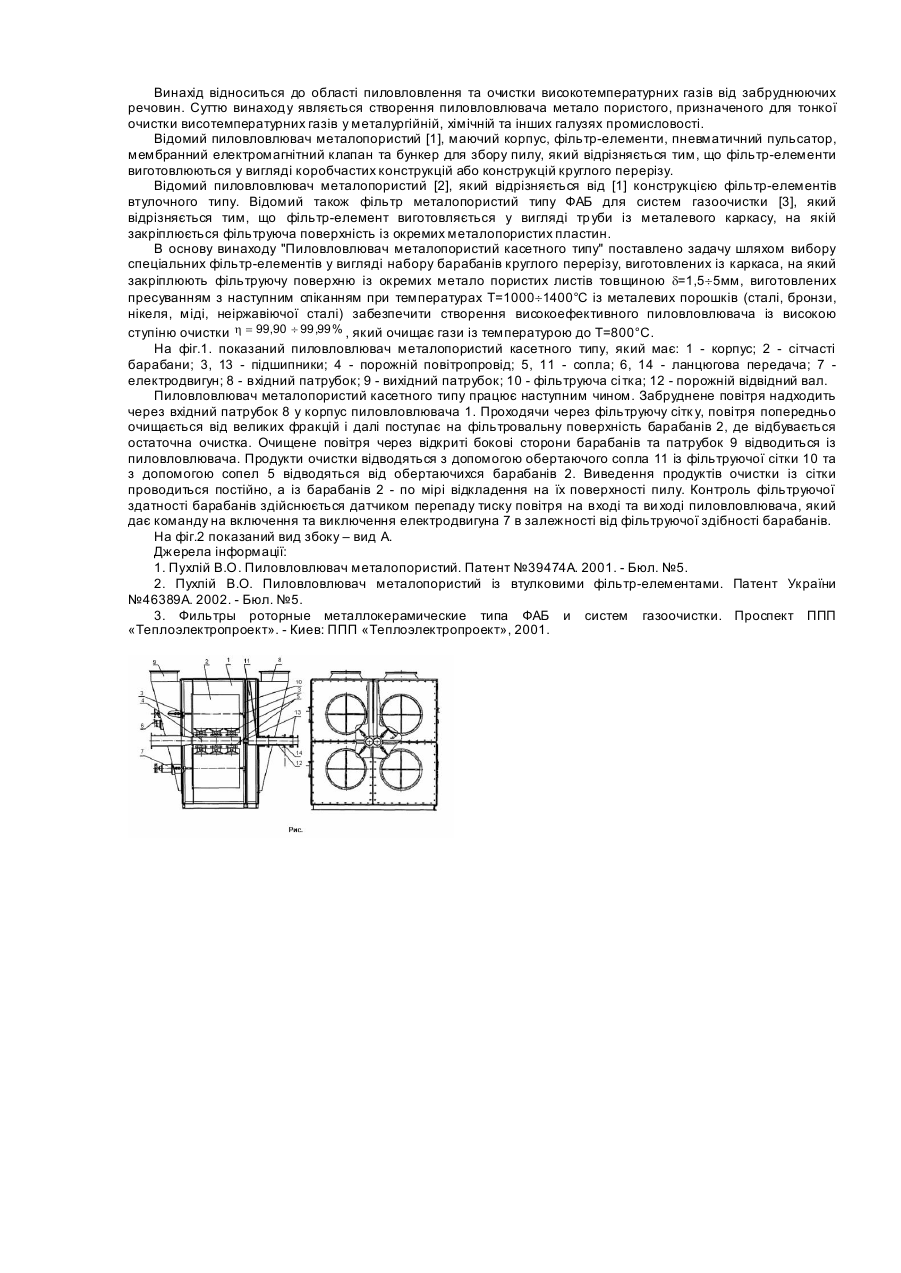
Номер патенту: 66489
Опубліковано: 17.05.2004
Автор: Пухлій Володимир Олександрович
МПК: B01D 45/12
Мітки: пиловловлювач, металопористий, касетного, високотемпературний, типу
Формула / Реферат:
Пиловловлювач металопористий високотемпературний касетного типу, який містить корпус, фільтр-елементи, електропривід, який відрізняється тим, що фільтр-елементи вибирають у вигляді барабанів круглого перерізу, виготовлених із каркаса, на який закріплюють фільтруючу поверхню із окремих металопористих листів товщиною мм, виготовлених пресуванням з наступнимим спіканням при...
Напрямна для опорних роликів пристрою консольного типу для перекривання проїзду або проходу
Номер патенту: 48828
Опубліковано: 12.04.2010
Автор: Калінін Дмитрій Юрійович
МПК: E06B 11/00
Мітки: опорних, роликів, пристрою, напрямна, проходу, консольного, типу, перекривання, проїзду
Формула / Реферат:
1. Напрямна для опорних роликів пристрою консольного типу для перекривання проїзду або проходу, яка являє собою тонкостінний заданої довжини фігурний у перерізі елемент, що містить плоскі закриту і розімкнену полиці, з'єднані між собою бічними пластинами, яка відрізняється тим, що бічні пластини в своїй нижній частині підігнуті в напрямку вертикальної осі перерізу напрямної.2. Напрямна за п. 1, яка відрізняється тим, що бічні пластини...
Сегмент ріжучого апарата сільськогосподарських машин
Номер патенту: 65538
Опубліковано: 12.12.2011
Автори: Кондратюк Дмитро Гнатович, Кобець Олександр Миколайович, Кобець Анатолій Степанович, Пугач Андрій Миколайович
МПК: A01D 34/13
Мітки: апарата, машин, ріжучого, сільськогосподарських, сегмент
Формула / Реферат:
Сегмент ріжучого апарата сільськогосподарських машин, що містить основу, розташовану під кутом до осі симетрії сегмента, ріжучі бокові сторони із зубцями, одна з граней кожного зубця розташована паралельно основі сегмента, а друга - під кутом до основи і до площини сегмента, який відрізняється тим, що насічка має змінну глибину і зменшується у напрямку ріжучої кромки.
Спосіб визначення стану твердіння осьової зони і/або нижнього кінця рідкої фази у заготовці при безперервному литті металевих матеріалів, зокрема сталі, і сегмент опорної роликової системи для його здійснення
Номер патенту: 83551
Опубліковано: 25.07.2008
Автор: Вейєр Аксель
МПК: B22D 11/16, B22D 11/12, B22D 11/128, B21B 37/00
Мітки: системі, заготовці, роликової, сталі, матеріалів, зокрема, визначення, нижнього, рідкої, безперервному, здійснення, опорної, кінця, стану, фазі, сегмент, осьової, спосіб, зони, металевих, литті, твердіння
Формула / Реферат:
1. Спосіб визначення стану твердіння осьової зони і/або положення нижнього кінця рідкої фази у заготовці при безперервному литті металевих матеріалів, зокрема сталі, у роликовому сегменті (1) опорної роликової системи (2), в якій положення верхньої рами (3), яка несе верхні ролики (4), регулюють за допомогою розташованих у кутах (5а, 5b, 5с, 5d) багатокутника гідравлічних циліндропоршневих блоків (6) відносно положення нижньої рами (7), яка...
Попередній патент: Пара пачок сигарет та картонна коробка з множиною пачок сигарет
Наступний патент: Установка для збору яєць зернової молі
Випадковий патент: Спосіб діагностики порушень кровоплину судин геніталій у жінок репродуктивного віку