Пасивний кореляційний спосіб визначення положення космічного апарата
Номер патенту: 116374
Опубліковано: 10.05.2017
Автори: Бушуєв Фелікс Іванович, Шульга Олександр Васильович, Калюжний Микола Панасович
Формула / Реферат
Пасивний кореляційний спосіб визначення положення космічного апарата, при якому на розташованих в зоні покриття контрольованого космічного апарата рознесених у просторі наземних станціях, синхронізованих за допомогою GPS, реєструють сигнали DVB-S, які випромінює космічний апарат, отримані вибірки сигналів каналами зв'язку передають в центр обробки, де за допомогою кореляційного аналізу обчислюють значення різниці в часі прийому станціями сигналів TDOA (Time Difference Of Arrival), випромінюваних космічним апаратом, і шляхом порівняння отриманих в результаті кореляційного аналізу TDOA і відомих координат наземних станцій визначають координати космічного апарата і прогнозують його орбітальне положення, який відрізняється тим, що для прийому сигналів (In і Qu), що надходять з космічного апарата, в наземних станціях використовують розташовані в приймачах станцій радіочастотні блоки з квадратурними детекторами, виконаними з можливістю виводу прямого (In) і квадратурного сигналів (Qu), прийняті сигнали з виходу радіочастотного блока приймачів подають на зовнішні відносно до приймачів аналого-цифрові перетворювачі (АЦП), за які використовують двоканальні USB-осцилографи з зовнішнім запуском, на зовнішній запуск осцилографів подають щосекундні синхроімпульси (PPS - Pulse-Per-Second), сформовані GPS-приймачами станцій мережі, забезпечуючи при цьому щосекундно в момент приходу сигналу PPS-запис у внутрішні пам'яті осцилографів вибірок (IQ) сигналів DVB-S з космічного апарата заданої тривалості у вигляді цифрових значень амплітуд квадратурних каналів приймачів, вибірки (IQ) з використанням програмного забезпечення щосекундно переміщують із внутрішньої пам'яті осцилографів в комп'ютери станцій, де їх обробляють шляхом перетворення комплексних вибірок в дійсні згідно з наступним виразом: ![]() де
де ![]() і
і ![]() - амплітуда і фаза комплексного сигналу в момент часу
- амплітуда і фаза комплексного сигналу в момент часу ![]() , і шляхом нормування вибірок
, і шляхом нормування вибірок ![]() згідно з наступним виразом:
згідно з наступним виразом: ![]() , потім округлюють отримані нормовані значення з точністю, яка відповідає заданому коефіцієнту krbound, та перетворюють округлені значення в цілі числа:
, потім округлюють отримані нормовані значення з точністю, яка відповідає заданому коефіцієнту krbound, та перетворюють округлені значення в цілі числа: ![]() , де
, де ![]() - середнє та середньоквадратичне відхилення вибірки
- середнє та середньоквадратичне відхилення вибірки ![]() , а функція floor() дорівнює найбільшому цілому, що не перевищує значення, задане в дужках функції,
, а функція floor() дорівнює найбільшому цілому, що не перевищує значення, задане в дужках функції,
після цього за допомогою Internet коефіцієнт krbound передають разом з масивом (g) в центр обробки для відновлення вибірок (![]() ), в центрі обробки обчислюють щосекундні значення TDOA (
), в центрі обробки обчислюють щосекундні значення TDOA (![]() ), використовуючи наступний вираз
), використовуючи наступний вираз ![]() де
де
i, j - умовні порядкові номери станцій мережі;
![]() та
та ![]() - задані початкові затримки від початку секунди UTC (Coordinated Universal Time - всесвітній координований час) синхроімпульсів PPS, які дозволяють розташовувати станції мережі на довільній відстані одна від одної незалежно від тривалості вибірки Ts і які формуються GPS-приймачами станцій;
- задані початкові затримки від початку секунди UTC (Coordinated Universal Time - всесвітній координований час) синхроімпульсів PPS, які дозволяють розташовувати станції мережі на довільній відстані одна від одної незалежно від тривалості вибірки Ts і які формуються GPS-приймачами станцій;
![]() - виміряне значення різниці апаратурних затримок станцій;
- виміряне значення різниці апаратурних затримок станцій;
![]() - виміряний коефіцієнт пропорційності між діючою частотою дискретизації fv і номінальною: fv=ksr ▪ fn,
- виміряний коефіцієнт пропорційності між діючою частотою дискретизації fv і номінальною: fv=ksr ▪ fn,
nхі - обчислене зміщення максимуму кореляційної функції від початку вибірки, отриманої i-ою станцією,
n0j - задане зміщення середньої частини вибірки, отриманої j-ою станцією, від її початку, після чого порівнюють TDOA з відомими координатами наземних станцій для визначення положення космічного апарата.
Текст
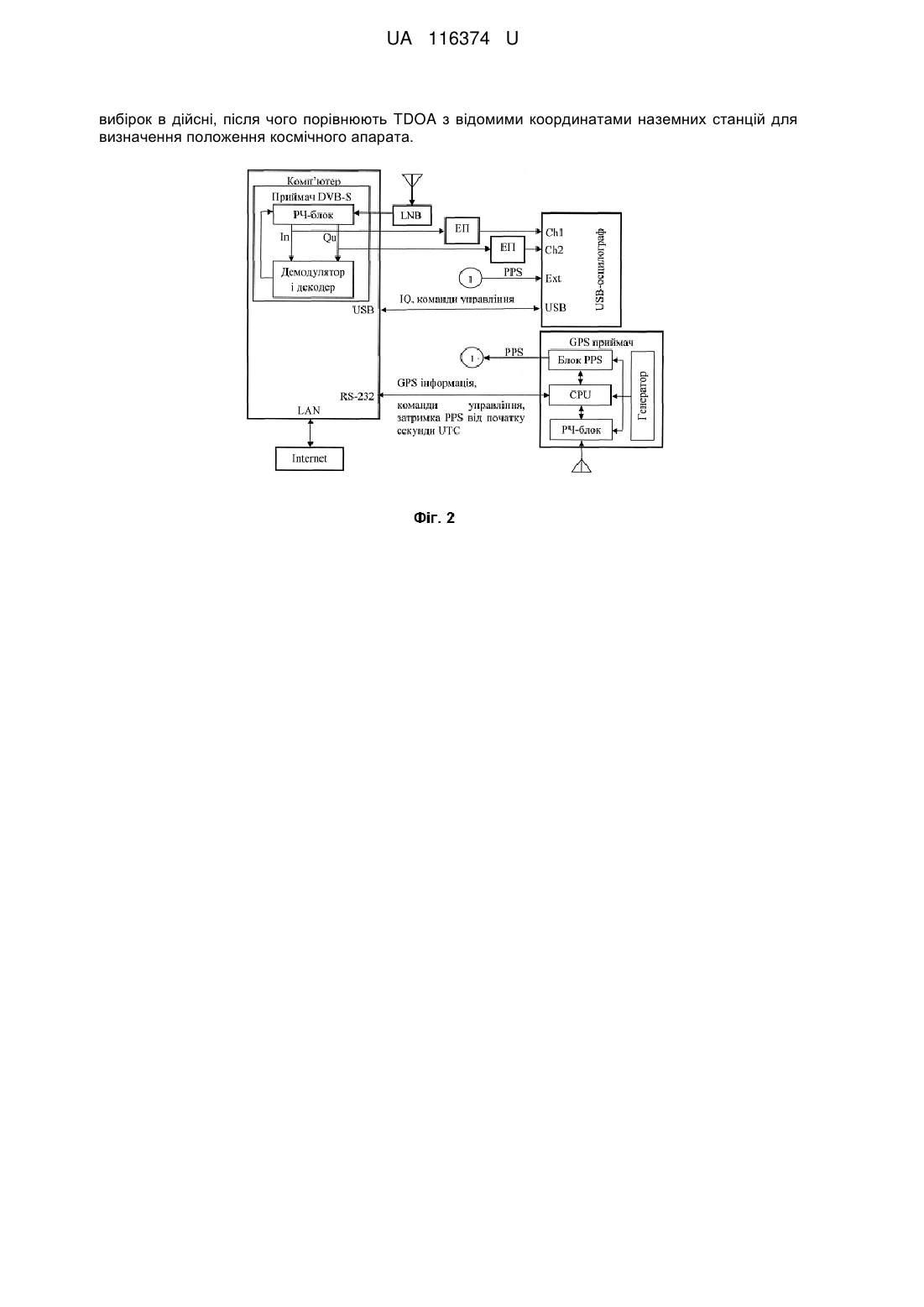
Реферат: Пасивний кореляційний спосіб визначення положення космічного апарата, при якому на розташованих в зоні покриття контрольованого космічного апарата рознесених у просторі наземних станціях, синхронізованих за допомогою GPS, реєструють сигнали DVB-S, які випромінює космічний апарат, отримані вибірки сигналів каналами зв'язку передають в центр обробки, де за допомогою кореляційного аналізу обчислюють значення різниці в часі прийому станціями сигналів TDOA (Time Difference Of Arrival), випромінюваних космічним апаратом, і шляхом порівняння отриманих в результаті кореляційного аналізу TDOA і відомих координат наземних станцій визначають координати космічного апарата і прогнозують його орбітальне положення, причому для прийому сигналів (In і Qu), що надходять з космічного апарата, в наземних станціях використовують розташовані в приймачах станцій радіочастотні блоки з квадратурними детекторами, виконаними з можливістю виводу прямого (In) і квадратурного сигналів (Qu), прийняті сигнали з виходу радіочастотного блока приймачів подають на зовнішні відносно до приймачів аналого-цифрові перетворювачі (АЦП), за які використовують двоканальні USB-осцилографи з зовнішнім запуском, на зовнішній запуск осцилографів подають щосекундні синхроімпульси (PPS - Pulse-Per-Second), сформовані GPS-приймачами станцій мережі, забезпечуючи при цьому щосекундно в момент приходу сигналу PPS-запис у внутрішні пам'яті осцилографів вибірок (IQ) сигналів DVB-S з космічного апарата заданої тривалості у вигляді цифрових значень амплітуд квадратурних каналів приймачів, вибірки (IQ) з використанням програмного забезпечення щосекундно переміщують із внутрішньої пам'яті осцилографів в комп'ютери станцій, де їх обробляють шляхом перетворення комплексних UA 116374 U (12) UA 116374 U вибірок в дійсні, після чого порівнюють TDOA з відомими координатами наземних станцій для визначення положення космічного апарата. UA 116374 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до позиційних спостережень космічних об'єктів на навколоземних орбітах, особливо до визначення положення телевізійних супутників на геостаціонарних орбітах в геоцентричній неінерційній прямокутній системі координат. Найпоширенішим радіотехнічним засобом супроводу космічних апаратів (КА) є однопозиційний радар, який має вузьконаправлену антену, призначену для супроводу супутника по азимуту та куту місця та систему тонового або кодового дистанціювання, призначену для визначення дальності. Похибка визначення кутових координат на частоті 14 ГГц за допомогою антени з діаметром 10 м становить 10 кутових секунд [1], що обумовлює похибку визначення положення КА на геостаціонарних орбітах порядку 1500 м. До основних недоліків такого радара можна віднести невисоку точність визначення координат КА, значну вартість як виготовлення, так і експлуатації радара, створення перешкод для функціонування обладнання як контрольованого, так і сусідніх КА завдяки випромінюванню радаром електромагнітної енергії в напрямку КА, можливість контролю положення тільки своїх КА. Проблему електромагнітної сумісності вдалося частково усунути в системі DARTS (Digital Advanced Ranging with Transport-stream Signals) завдяки використанню для передачі пакета дистанціювання транспортного потоку цифрового супутникового телебачення стандарту DVB-S (Digital Video Broadcasting-Satellite) з корисним навантаженням [2]. Система була створена компанією SES (Societe Europeenne des Satellites) Astra спільно з Інститутом інтегральних схем ім. Фраунгофера (Фраунгофер ГІС) для контролю положення геостаціонарних КА, що транслюють цифрове супутникове телебачення в форматі DVB-S. Система може працювати як в однопозиційному, так і в багатопозиційному варіанті. Система може контролювати лише свої КА, оскільки для визначення моменту випромінювання пакета дистанціювання один із приймачів повинен бути суміщений зі штатним передавачем корисного навантаження. Для визначення моменту випромінювання на вхід приймача подається сигнал зі спеціального відгалуження в антенно-фідерному тракті передавача. Передавач і приймач при цьому мають один спільний опорний генератор. Для визначення відстані до супутника рознесеними у просторі приймачами момент випромінювання передається їм з приймача, суміщеного з передавачем. Тобто, у випадку несправності цього приймача, вся система перестає працювати. Як момент випромінювання, так і момент прийому пакета визначається з використанням згортки випроміненого та прийнятого сигналів з опорним сигналом. Опорний сигнал формується у відповідності до повідомлення, отриманого після декодування прийнятого сигналу, за допомогою тракту аналогічного тому, який використовується для формування випромінюваного та обробки прийнятого сигналів. Оскільки декодування сигналу потребує часу, прийнятий сигнал після оцифровування попередньо запам'ятовується. Для згортки використовуються оцифровані сигнали з виходу квадратурного детектора-приймача. Багатопозиційна система DARTS синхронізується за допомогою GPS. При цьому як опорний сигнал приймачів DVB-S, включаючи їхні АЦП (аналого-цифровий перетворювач), використовується сигнал 10 МГц, що формується приймачами GPS. Незважаючи на високу точність визначення дальності, яка є кращою ніж 0.3 м, у випадку однопозиційної DARTS похибка визначення координат супутника співпадає з похибкою традиційного радара дистанціювання, оскільки обумовлена похибками визначення кутових координат супутника. Випробовування трипозиційної DARTS показали, що система також має невисоку точність визначення координат супутника, обумовлену недостатньою точністю синхронізації системи за допомогою GPS [3]. Наведена похибка визначення дальності отримана DARTS для сигналу DVB-S з шириною спектра 30 МГц. Цю похибку, зважаючи на умови експерименту, можна вважати мінімально можливою для такого сигналу. Зазначимо також, що сигнал DVB-S має псевдошумовий характер, а отже його автокореляційна функція близька до 5-функції, тобто, даний тип сигналу є ідеальним для використання в пристроях вимірювання затримки. Протягом 2010-2013 років корпорація SES спільно з Фраунгофер ІІС виконала проект Європейського космічного агентства (ЄКА) по створенню системи PaCoRa (Passive Correlation Ranging), призначеної для високоточного супроводу геостаціонарних супутників. Спосіб визначення положення космічних апаратів - телевізійних супутників, що реалізується цією системою, полягає в наступному. Рознесені у просторі наземні термінали (станції) системи, розташовані в зоні покриття контрольованого супутника, синхронно реєструють сигнал, який випромінюється супутником. Отримані вибірки сигналу каналами зв'язку надходять в центр обробки, де за допомогою кореляційного аналізу обчислюються значення TDOA (Time Difference Of Arrival) - різниці в часі прийому станціями сигналів, випромінюваних супутниками. Для визначення координат супутника і прогнозування його орбітального положення використовуються отримані значення TDOA та відомі координати наземних станцій. Станції синхронізуються за допомогою GPS. 1 UA 116374 U 5 10 15 20 25 30 35 40 45 50 55 60 На сайтах ЄКА та SES наводиться лише загальна інформація про спосіб та про створення системи з п'яти приймальних станцій, одна з яких є резервною, а також повідомляється, що система була випробувана в діапазоні радіохвиль Ки (12-18 ГГц) [4, 5]. В доповіді [6] наводяться дані про похибку вимірювання TDOA, яка склала приблизно 7.7 не або 2 м і була отримана системою PaCoRa протягом двох діб у березні 2014 року. Тут і дальше похибка TDOA в метрах дорівнює похибці в секундах помноженій на швидкість світла і відповідає похибці різниці нахилених дальностей від супутника до станцій. До складу PaCoRa входили дві станції, розташовані в Бецдорфі (Люксембург) і в Мюнхені (Німеччина), що відповідає відстані між станціями приблизно рівній 425 км. В доповіді також наводиться похибки обчислення координат супутника, отримані в результаті моделювання, які не перевищують 119 м. В доповіді відсутня інформація як про характеристики приймальних станцій PaCoRa, так і про параметри моделювання. В останньому повідомленні, відомому нам на даний час, йдеться про впровадження проекту PaCoRa в США [7]. Реалізований в системі PaCoRa спосіб визначення положення КА можна вважати однією з реалізацій радіоінтерферометричного методу радіоастрономії, оскільки основою обох способів є використання кореляційного аналізу радіосигналів для визначення просторових характеристик джерел радіовипромінювання. Оскільки в радіоастрономії досліджуються надзвичайно віддалені від Землі джерела радіовипромінювання, то радіотелескопи - складові радіоінтерферометрів являють собою надчутливі радіоприймачі з антенами, розміри яких часто сягають десятки і сотні метрів. Високі вимоги пред'являються до стабільності і ідентичності амплітудно-фазових характеристик приймальних трактів радіотелескопів. Все це в свою чергу потребує використання, в тому числі, квантових стандартів часу і частоти як опорних генераторів і кріогенних установок для охолодження вхідних каскадів радіоприймачів. Оскільки виготовлення і експлуатація радіотелескопів потребують значних витрат, то потужні радіоінтерферометри з наддовгими базами (РНДБ) для задач, не пов'язаних з астрономією, використовуються епізодично, наприклад, для калібрування супутникових навігаційних систем. В роботі [8] китайська мережа РНДБ (КМР) із 4 радіотелескопів протягом доби в серпні 2010 року супроводжувала геостаціонарний супутник, який входить до складу китайської супутникової навігаційної системи COMPASS. Максимальна відстань між радіотелескопами КМР по широті дорівнювала 1114 км, а по довготі - 3249 км. Як маяк для КМР слугував радіосигнал з частотою 2.2 ГГц і з шириною спектра приблизно 2 МГц. Похибка обчислення TDOA становила 3.6 не, а похибка визначення координат супутника дорівнювала 10 м. Для визначення орбітального положення супутника, при цьому використовувалася сучасна модель руху супутника і сучасна модель вимірювання, які враховували гравітаційне тяжіння Сонця і Місяця, гравітаційне тяжіння несферичної Землі, гравітаційне тяжіння приливів в твердій Землі і океанських приливів, радіаційний тиск Сонця, релятивістські ефекти, атмосферну рефракцію та ін. В роботі зазначається, що порівняно невисока точність визначення TDOA обумовлена вузькістю спектра сигналу радіомаяка. Задачею винаходу є створення повністю пасивного кореляційного способу визначення положення космічного апарата (супутника), який забезпечує досягнення такого технічного результату: - мала похибка обчислення координат супутника в геоцентричній неінерційній прямокутній системі координат; - відсутність впливу на функціонування обладнання супутника завдяки відсутності електромагнітного випромінювання в напрямку супутника; - можливість контролю орбітального положення будь якого діючого телекомунікаційного супутника, включаючи власні супутники та супутники третьої сторони; - збереження працездатності при деградації мережі до 3 станцій або до 75 % від повної працездатності; - мінімізація витрат на супровід супутника за рахунок автоматизації вимірювань; - можливість використання малих антен та стандартних радіоприймачів. В пасивному кореляційному способі визначення положення космічного апарата, при якому на розташованих в зоні покриття контрольованого космічного апарата рознесених у просторі наземних станціях, синхронізованих за допомогою GPS, реєструють сигнали DVB-S, які випромінює космічний апарат, отримані вибірки сигналів каналами зв'язку передають в центр обробки, де за допомогою кореляційного аналізу обчислюють значення різниці в часі прийому станціями сигналів (TDOA-Time Difference Of Arrival), випромінюваних космічним апаратом, і шляхом порівняння отриманих в результаті кореляційного аналізу TDOA і відомих координат наземних станцій визначають координати космічного апарата і прогнозують його орбітальне положення, згідно з винаходом, поставлена задача вирішена тим, що для прийому сигналів (In і 2 UA 116374 U 5 10 Qu), що надходять з космічного апарата, в наземних станціях використовують розташовані в приймачах станцій радіочастотні блоки з квадратурними детекторами, виконаними з можливістю виводу прямого (In) і квадратурного сигналів (Qu), прийняті сигнали з виходу радіочастотного блока приймачів подають на зовнішні відносно до приймачів аналого-цифрові перетворювачі (АЦП), за які використовують двоканальні USB-осцилографи з зовнішнім запуском, на зовнішній запуск осцилографів подають щосекундні синхроімпульси (PPS-PulsePer-Second), сформовані GPS приймачами станцій мережі, забезпечуючи при цьому щосекундно в момент приходу сигналу PPS запис у внутрішні пам'яті осцилографів вибірок (IQ) сигналів DVB-S з космічного апарата заданої тривалості у вигляді цифрових значень амплітуд квадратурних каналів приймачів, вибірки (IQ) з використанням програмного забезпечення щосекундно переміщують із внутрішньої пам'яті осцилографів в комп'ютери станцій, де їх обробляють шляхом перетворення комплексних вибірок в дійсні згідно з наступним виразом: F t sin 1, де і - амплітуда і фаза комплексного сигналу в момент часу t , і F F , потім ˆ F1 округлюють отримані нормовані значення з точністю, яка відповідає заданому коефіцієнту ˆ krbound, та перетворюють округлені значення в цілі числа: g foor F k round 0,5 , де F i середнє та середньоквадратичне відхилення вибірки F , а функція floor() дорівнює найбільшому цілому, що не перевищує значення, задане в дужках функції, після цього за допомогою Internet коефіцієнт krbound передають разом з масивом (g) в центр обробки для ˆ відновлення вибірок ( F ), в центрі обробки обчислюють щосекундні значення TDOA ( ), шляхом нормування вибірок 15 20 F F t згідно з наступним виразом: ij no j використовуючи наступний вираз ij nxi Si де k f k f Sj hij , sr n sr n i, j - умовні порядкові номери станцій мережі; Si і Sj - задані початкові затримки від початку секунди UTC (Coordinated 25 30 35 40 45 50 Universal Time - всесвітній координований час) синхроімпульсів PPS, які дозволяють розташовувати станції мережі на довільній відстані одна від одної незалежно від тривалості вибірки Ts і які формуються GPS приймачами станцій; hij - виміряне значення різниці апаратурних затримок станцій; k sr - виміряний коефіцієнт пропорційності між діючою частотою дискретизації fv і номінальною: fv=ksr▪fn, nxi - обчислене зміщення максимуму кореляційної функції від початку вибірки, отриманої і-ою станцією, n0j - задане зміщення середньої частини вибірки, отриманої j-ою станцією, від її початку, після чого порівнюють TDOA з відомими координатами наземних станцій для визначення положення космічного апарата. Далі описано спосіб здійснення винаходу з посиланнями на креслення, де на Фіг. 1 схематично показана мережа станцій і супутник, що випромінює сигнал, а на Фіг. 2 блок-схема станцій. Повністю пасивний кореляційний спосіб визначення положення КА, аналог PaCoRa, був випробуваний спочатку в серпні 2011 року з використанням мережі із двох станцій, синхронізованих за допомогою GPS і рознесених у просторі приблизно на 150 км. Під час випробувань протягом двох діб контролювався телекомунікаційним геостаціонарним супутником (ТК ГСС) "HotBird-9" (13° с.д.) з використанням випромінюваного супутником на частоті 11179 МГц сигналу DVB-S з горизонтальною поляризацією та символьною частотою 27000 кГц. Пізніше була створена та функціонує експериментальна мережа пасивного кореляційного моніторингу (МПКМ) ТК ГСС у складі з 5 станцій, розташованих в містах Харків, Рівне, Мукачеве, Миколаїв (Україна) і в місті Вентспілс (Латвія). Відстань між станціями мережі по широті і довготі приблизно дорівнює 1000 км. Станції мережі укомплектовані широкорозповсюдженими (побутовими) приймачами DVB-S (а саме, приймачами SkyStarl і SkyStar2, виготовленими у вигляді РСІ-плат) та стандартними антенно-фідерними трактами з антенами, діаметри яких не перевищують 2 метри. З метою забезпечення реєстрації сигналів цифрового супутникового телебачення, приймачі були допрацьовані для виводу прямого і квадратурного сигналів їхніх квадратурних детекторів. На блок-схемі станції МПКМ, показаній на фіг. 2, використані такі позначення: LNB-LowNoise Block (малошумовий підсилювач), "РЧ-блок" - радіочастотний блок, "In" і "Qu" - прямий та 3 UA 116374 U 5 10 15 квадратурний сигнали, ЕП - емітерний повторювач, PPS-Pulse-Per-Second (синхроімпульс), "IQ" - вибірка значень амплітуд сигналів "In" і "Qu", LAN -адаптер локальної комп'ютерної мережі станції, CPU - мікропроцесор GPS приймача, "Генератор" - опорний генератор GPS приймача. Згідно з винаходом спосіб здійснюється наступним чином. Сигнали (In і Qu) з виходу радіочастотного блока ("РЧ-блок") подають на зовнішні (відносно до приймачів) АЦП, за які використовуються двоканальні (Ch1 і Ch2) USB-осцилографи з зовнішнім запуском (Ext). На зовнішній запуск осцилографів подають щосекундні синхроімпульси PPS (Pulse-Per-Second), сформовані GPS-приймачами станцій мережі. Таким чином, щосекундно, в момент приходу сигналу PPS, у внутрішню пам'ять осцилографів записуються вибірки сигналів DVB-S заданої тривалості (7У) у вигляді цифрових значень амплітуд квадратурних каналів приймачів. За допомогою програмного забезпечення вказані вибірки (IQ) щосекундно переміщають із внутрішньої пам'яті осцилографів в комп'ютери станцій, де вони обробляються, архівуються і записуються на жорсткі диски. При цьому типова конфігурація комп'ютерів складається з одноядерного процесора з тактовою частотою 1.5 ГГц, 1 гігабайта оперативної пам'яті та 100 гігабайтного жорсткого диска. Обробка вибірок полягає, перш за все, в перетворенні комплексних вибірок в дійсні згідно з наступним виразом (1): F t sin 1, 20 25 30 35 40 45 (1) де і , - амплітуда і фаза комплексного сигналу в момент часу t . Це перетворення забезпечує: - згортку вибірок, що реєструються станціями мережі, - зменшення вдвоє об'єму інформації, що передається зі станцій в центр обробки. Необхідність перетворення, пов'язана з забезпеченням згортки вибірок, обумовлена властивостями сигналу DVB-S та особливостями реєстрації вибірок станціями МПКМ. Стандарт цифрового супутникового телебачення DVB-S передбачає використання модуляції QPSK (Quadrature Phase-Shift Keying) для передачі цифрової інформації, тобто абсолютне значення фази радіосигналу несе інформацію про число (символ), що передається. При розповсюдженні радіосигналу від передавача до супутника і від супутника до приймача значення його фази змінюється. Для відновлення фази в приймачах супутникового телебачення використовується петля автоматичного підстроювання фази або PLL (Phase-Locked Loop), коли фаза гетеродину змінюється таким чином, щоб забезпечити максимальну відповідність вихідної послідовності символів відомій інформаційній структурі транспортного потоку. Перетворення аналогового комплексного сигналу DVB-S в цифровий вид поза петлі PLL, як це має місце в МПКМ, приводить до того, що значення містять додаткові фазові зсуви, обумовлені, перш за все, індивідуальними фазовими характеристиками приймачів та несинхронністю зчитування даних внутрішніми аналого-цифровими перетворювачами приймачів і зовнішніми АЦП станцій. Однак, враховуючи вид модуляції DVB-S, можна припустити, що послідовність значень різниці 1 , обчислена для одних і тих же моментів часу t різними приймачами, буде однаковою або близькою, якщо врахувати різницю затримок сигналу при розповсюдженні від супутника до приймачів. Відповідно, будуть однакові або близькі значення функції F( t ). Застосування перетворення F( t ) дозволило отримати згортку сигналів, зареєстрованих різними приймачами, з відношенням сигнал/шум на виході корелятора порядку 5-10, при тому, що вихідні комплексні сигнали не згортаються. Крім зазначеного перетворення, для зменшення об'єму інформації, що передається зі станцій в центр обробки, спочатку виконують нормування вибірок F F t згідно з наступним ˆ виразом: F1 F F , а потім округлення отриманих нормованих значень з точністю, яка відповідає заданому коефіцієнту krbound та перетворення округлених значень в цілі числа: ˆ g foor F k 0,5 , де F i - середнє та середньоквадратичне відхилення вибірки F , а 50 55 round функція floor() дорівнює найбільшому цілому, що не перевищує значення, задане в дужках функції. Коефіцієнт krbound передають разом з масивом (g) в центр обробки для відновлення вибірок ˆ ). Саме ці вибірки безпосередньо використовують для обчислення в результаті кореляційного (F аналізу значення TDOA. В даний час значення krbound=10 і було визначене шляхом спеціальних тестувань, при тому, що АЦП USB-осцилографів МПКМ мають розрядність 9 біт. 4 UA 116374 U 5 10 Отже, темп реєстрації вибірок мережею і, відповідно, темп обчислення TDOA, складає 1 секунду. Тривалість вибірок дорівнює 200 мкс, номінальна частота дискретизації (fn) становить 51.2 МГц, а об'єм однієї архівованої вибірки не перевищує 12 кбайт. Вказане значення fn відповідає частоті дискретизації Найквіста, оскільки під час спостережень реєструється сигнал DVB-S з шириною спектра 30 МГц. В МПКМ використовують осцилографи, максимальна смуга пропускання яких узгоджена з можливими значеннями ширини спектра реєстрованого сигналу DVB-S і дорівнює 200 МГц. Передачу даних спостережень зі станцій в центр обробки здійснюють по Internet. По Internet, також, проводять контроль функціонування обладнання станцій. Центр обробки знаходиться в Миколаєві. В центрі обробки для обчислення щосекундних значень TDOA ( ij ) використовується наступний вираз (2): n no j ij xi Si k f k f Sj hij , sr n sr n 15 20 (2) В наведений вираз входять наступні параметри: - i, j - умовні порядкові номери станцій мережі; - Si i Sj - задані початкові затримки від початку секунди UTC синхроімпульсів PPS (Pulse-Per-Second), які дозволяють розташовувати станції мережі на довільній відстані одна від одної незалежно від тривалості вибірки Ts (формуються GPS приймачами станцій); - hij - виміряне значення різниці апаратурних затримок станцій; - ksr - виміряний коефіцієнт пропорційності між діючою частотою дискретизації fv і номінальною: fv=ksr▪fn, . Передбачається, що hij залежать від характеристик обладнання станцій (наприклад, від 25 30 35 40 45 різниці електричних довжин кабелів зниження антен цифрового супутникового телебачення, антен GPS приймачів і т.п.), a ksr є величиною постійною для даного типу АЦП. Параметри hij і ksr визначаються в процесі калібрування до відправки станцій в місця дислокації. В виразі (2) nхі і n0j. вимірюються у відліках частоти дискретизації. Параметр nхі дорівнює зміщенню максимуму кореляційної функції від початку вибірки, отриманої i-ою станцією. Положення максимуму уточнюється інтерполяцією отриманих вибірок [9] та з використанням перетворенню Гільберта від кореляційної функції по методу, запропонованому в роботі [10]. Тому значення nхі в загальному випадку є дробовою невід'ємною величиною. Значення n0j також невід'ємне, але завжди ціле, оскільки дорівнює заданому зміщенню середньої частини вибірки, отриманої j-ою станцією, від її початку. Об'єм цієї середньої частини завжди менший кількості відліків у вибірці Ns=Тs•fn і дорівнює об'єму вибірки корелятора (Nc). Параметри n0j і Nc вибираються таким чином, щоб можливі значення TDOA відносно ( Si - Sj ) попадали в інтервал n0 j s c n0 j , . Зазвичай n0j=n0, тобто, значення n0j постійне, не залежить від номера fv fv станції. Для обчислення кореляційної функції використовується добре відомий метод з застосуванням дискретного швидкого перетворення Фур'є (ДШПФ). Нехай (хι: ℓ=0, Ns=1) - масив ˆ ( F )i нормованих вибіркових значень дійсного сигналу об'ємом Ns, отриманий і-ою станцією, а (уι:ℓ=0, Nc-1) масив нормованих вибіркових значень дійсного сигналу об'ємом Nc, взятий з ˆ середньої частин вибірки ( F )j, отриманої j-ою станцією. Доповнимо вибірки (х) і (у) нулями до p об'єму Nfft=2 Ns, де р>0 - ціле число. Позначимо через (X) і (Y) масиви значень прямого ДШПФ Р від вибірок (х) і (у), а через q - коефіцієнт, який задає крок інтерполяції і дорівнює q=2 , де p0 є ціле число. Зазвичай;p=1, а отже q=2, тобто, крок за часом зменшується в два рази. Для інтерполяції масиви (X) і (Y) доповнюються q▪(Nfft-1) нулями у відповідності з наступним виразом [9]: 5 UA 116374 U Gk , 0 k N 1 1 G ,k 2 , ˆ Gk 0, 1 k 2 q 1 1 G , k 2 q 2 Gn, 1 n 2 1, k n 2 q 1 (3) де N=Nfft/2. Далі обчислюється спектр згортки інтерпольованих вибірок: ˆ ˆ ˆ C Y * , 0 k q 1, Ck=Yk-rk, O
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 17/66, G01S 13/66
Мітки: космічного, пасивний, кореляційний, апарата, визначення, положення, спосіб
Код посилання
<a href="https://ua.patents.su/11-116374-pasivnijj-korelyacijjnijj-sposib-viznachennya-polozhennya-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Пасивний кореляційний спосіб визначення положення космічного апарата</a>
Спосіб визначення відносного положення та природної відносної траєкторії другого зближуваного космічного апарата щодо першого та пристрій для його здійснення
Номер патенту: 27739
Опубліковано: 16.10.2000
Автор: Ферро Данієль
МПК: B64G 1/24
Мітки: відносного, другого, спосіб, відносної, траєкторії, космічного, зближуваного, пристрій, здійснення, апарата, першого, природної, положення, визначення
Текст:
...если указанный первый сближающийся космический аппарат имеет значительный и известный горизонтальный размах L, измеряют соответственно значение S1 или S2 места начала указанной системы отсчета, связанной с первым сближающимся космическим аппаратом, относительно указанной точки отсчета (О), связанной со вторым сближающимся космическим аппаратом, в каждый из моментов времени t1 и 12, измеряют в каждый из моментов времени t1 и 12,...
Спосіб визначення орієнтації космічного апарата
Номер патенту: 79326
Опубліковано: 25.04.2013
Автори: Кулік Анатолій Степанович, Субота Анатолій Максимович, Красножон Олександра Володимирівна
МПК: B64G 1/24
Мітки: визначення, спосіб, космічного, орієнтації, апарата
Формула / Реферат:
Спосіб визначення орієнтації космічного апарата, який полягає в тому, що параметри орієнтації космічного апарата відносно центра мас обраховують за інформацією вихідних параметрів сонячних батарей, пов'язаних з кутом Сонця відносно їх робочих поверхонь, який відрізняється тим, що як датчикові пристрої визначення орієнтації на Сонце використовують окремі елементи однієї або декількох сонячних батарей, що розташовані на однакових відстанях від...
Спосіб визначення орієнтації космічного апарата
Номер патенту: 51673
Опубліковано: 26.07.2010
Автори: Козелкова Катерина Сергіївна, Ян Ке, Кучерук Сергій Михайлович, Загорулько Олександр Миколайович, Костенко Борис Олександрович
МПК: B64G 1/24
Мітки: космічного, орієнтації, апарата, визначення, спосіб
Формула / Реферат:
Спосіб визначення орієнтації космічного апарата (КА), який полягає в тому, що параметри орієнтації КА відносно центра мас обраховують за інформацією вихідної потужності панелей сонячних батарей, пов'язаної з кутом Сонця відносно їх робочих поверхонь, який відрізняється тим, що як датчикові пристрої використовують сонячні батареї, розміщені в трьох ортогональних площинах.
Спосіб визначення орієнтації космічного апарата
Номер патенту: 104831
Опубліковано: 11.03.2014
Автори: Олійник Сергій Вікторович, Лабазов Олег Олександрович, Плаксій Юрій Андрійович, Кузнєцов Юрій Олексійович
МПК: G01C 21/24, B64G 1/24
Мітки: космічного, орієнтації, спосіб, визначення, апарата
Формула / Реферат:
Спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями за такт розрахунку обчислюють половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту, а потім визначають тривісну орієнтацію...
Спосіб визначення поточних навігаційних параметрів космічного апарата
Номер патенту: 32157
Опубліковано: 12.05.2008
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: параметрів, спосіб, апарата, поточних, навігаційних, космічного, визначення
Формула / Реферат:
Спосіб визначення поточних навігаційних параметрів космічного апарата, який полягає в тому, що за допомогою наземних оптичних вимірювальних систем проводять спостереження та визначення поточних навігаційних параметрів космічного апарата (КА) на тіньовій (неосвітленій) ділянці орбіти за відсутності відображеного від конструкції КА сонячного світла, який відрізняється тим, що для освітлювання використовують штучне джерело випромінювання, яке...
Попередній патент: Освітлювальний пристрій
Наступний патент: Віконний блокувальний пристрій “гогуля”
Випадковий патент: Спосіб формування проксимального анастомозу при стегнево-гомілкових аутовенозних шунтуваннях