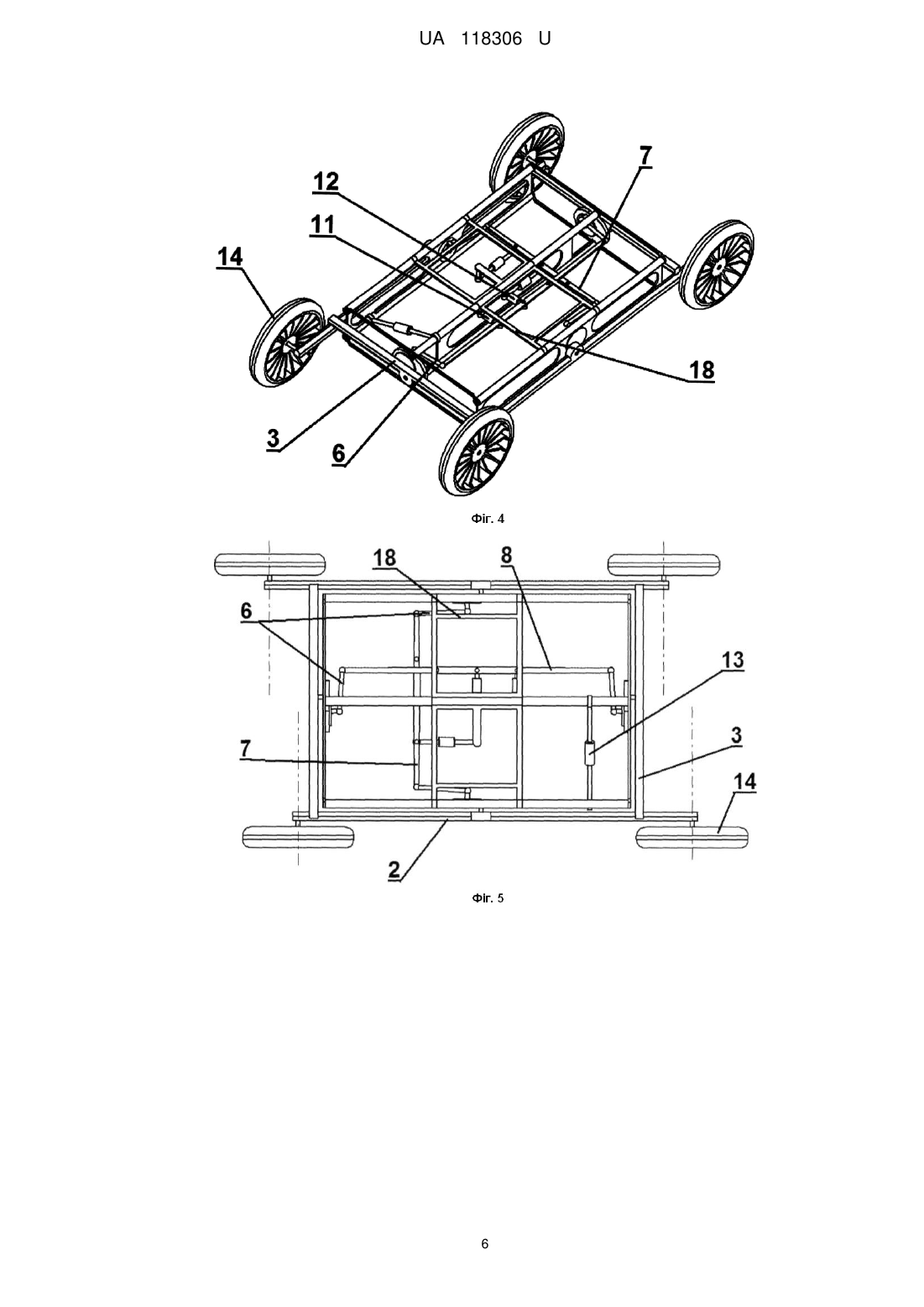
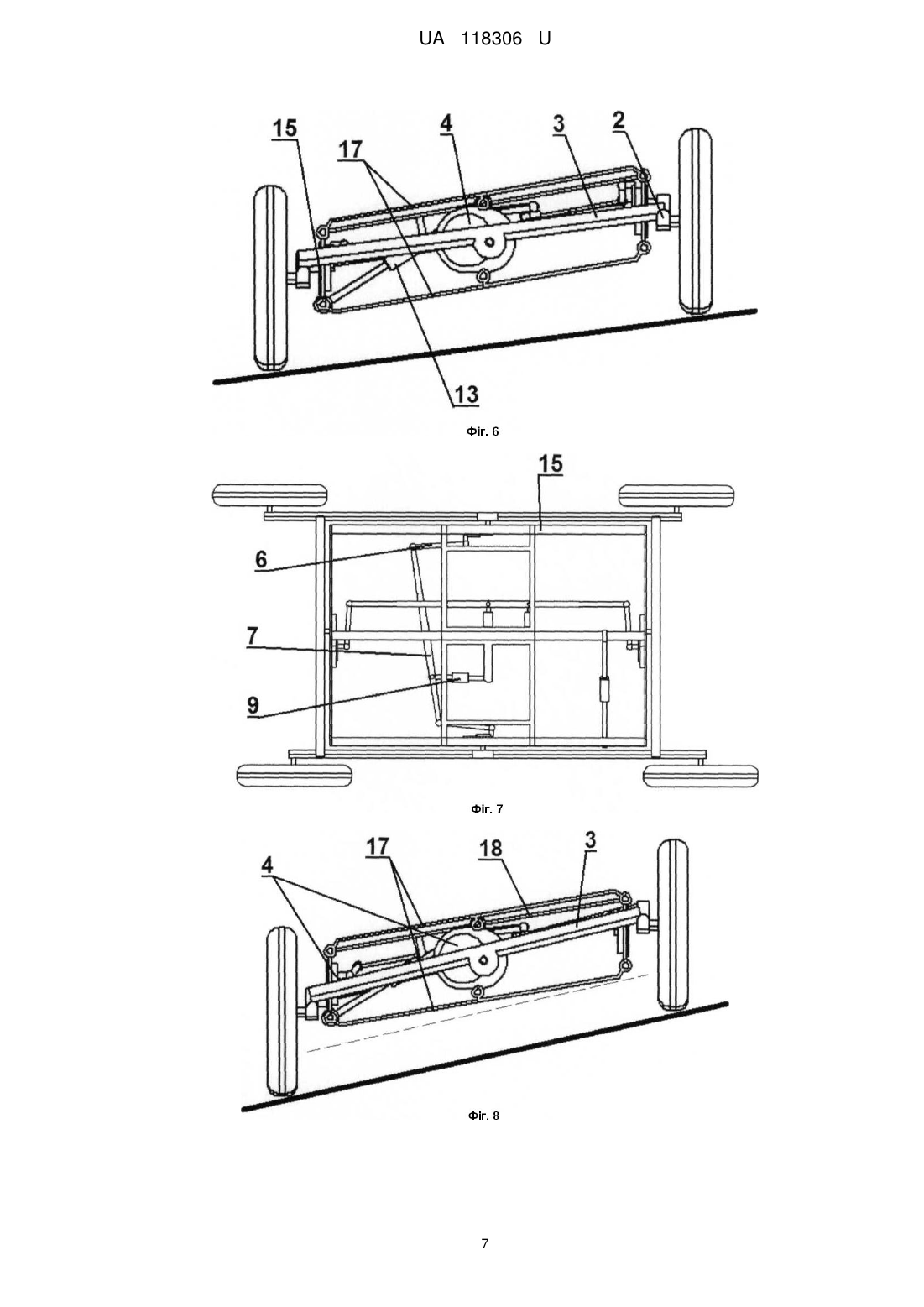
Підвіска транспортного засобу “afw-6″
Номер патенту: 118306
Опубліковано: 25.07.2017
Автори: Петренко Сергій Юрійович, Бейлін Георгій Володимирович

Формула / Реферат
1. Підвіска транспортного засобу, що містить раму, до протилежних сторін якої своїми центральними зонами прикріплена пара однакових поздовжніх важелів, рухомих відносно площини рами, а кінці поздовжніх важелів призначені для їх з'єднання з відповідними органами руху, яка відрізняється тим, що рама виконана рухомою, має форму чотирикутника, кутові зони якого з'єднані шарнірно та містить дві паралельно розташовані боковини, принаймні два з'єднувачі боковин, які разом з боковинами утворюють паралелограм, центральну вставку рами, кінці якої шарнірно з'єднані з центральними ділянками з'єднувачів та ділять раму на два малих паралелограми, а також актуатор рами, який є діагоналлю одного з малих паралелограмів рами, один кінець актуатора рами шарнірно з'єднаний з одним кутовим шарніром центральної вставки рами, а другий - з кутовим шарніром одної боковини, шарнірно з'єднаним з відповідним кінцем одного з'єднувача боковин,
підвіска доповнена парою однакових поперечних важелів,
а кожен важіль прикріплений своєю центральною зоною до центральної ділянки відповідної сторони рами через гумово-металевий шарнір та Г-подібний важіль положення, встановлений в гумово-металевому шарнірі, поздовжні і поперечні важелі розташовані в одній площині і мають контактні поверхні циліндричної форми для механічного зв'язку один з одним і орієнтовані наступним чином: поздовжній лівий і правий - контактною поверхнею вгору, поперечний передній і задній - контактною поверхнею вниз, контактні поверхні одного важеля дотичні до площини, що проходить через вісь обертання важеля і розташовані по одну сторону від неї,
а кожна сторона рухомої рами, встановлена з можливістю обпирання на два суміжних органи руху через відповідний важіль.
2. Підвіска за п. 1, яка відрізняється тим, що її органи руху виконані або у вигляді коліс, або гусениць, або лиж, або поплавків катамарана.
Текст
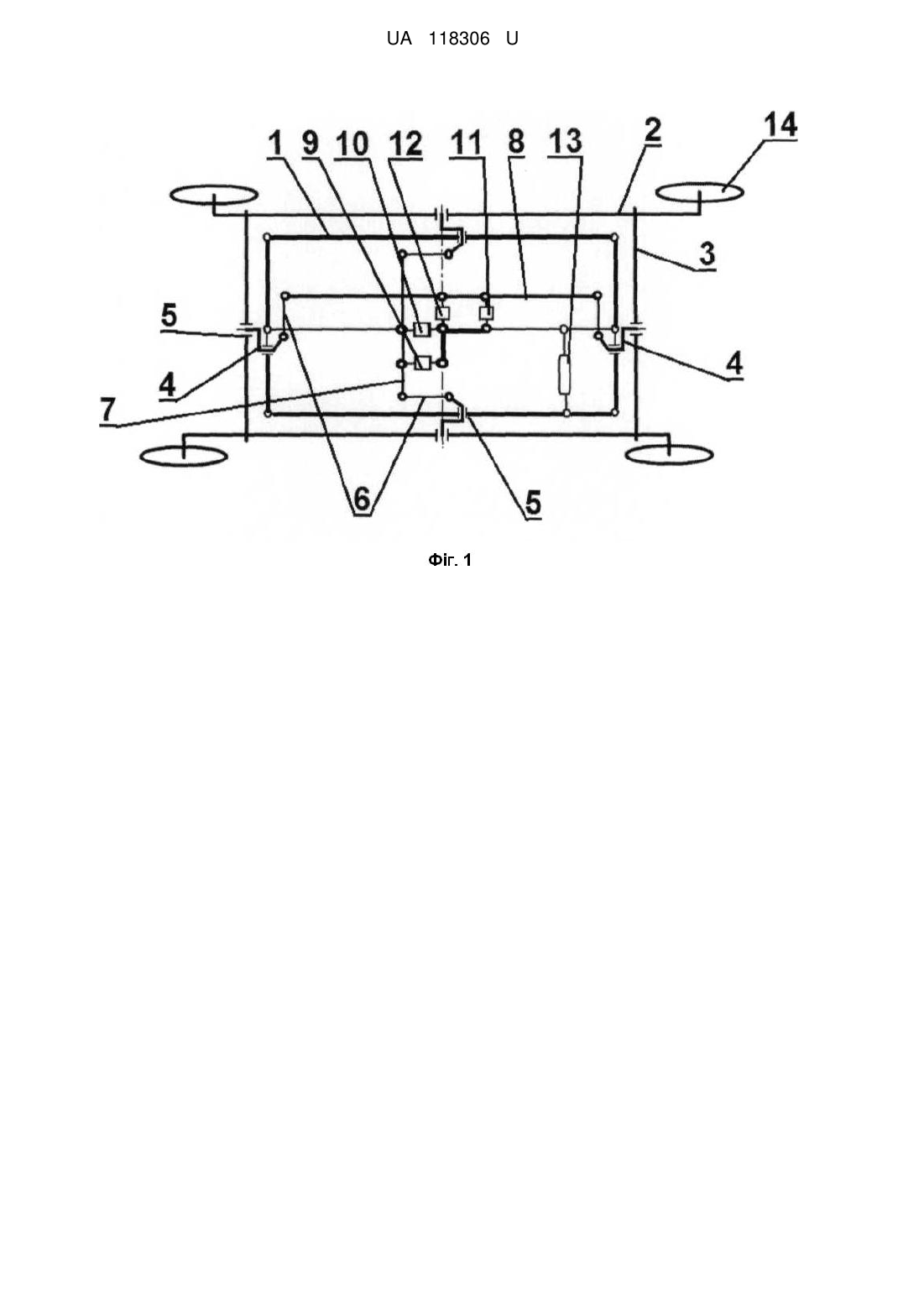
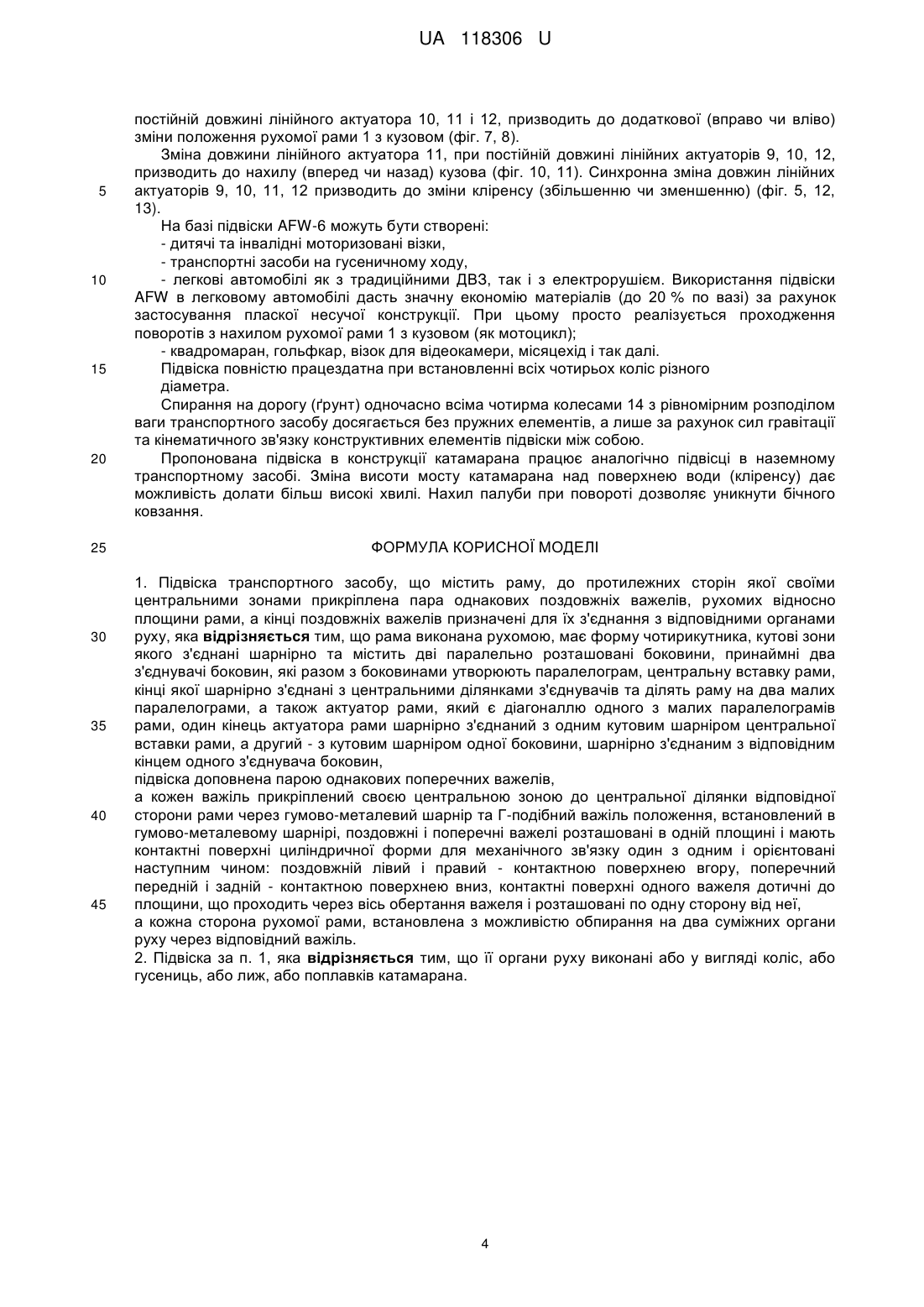
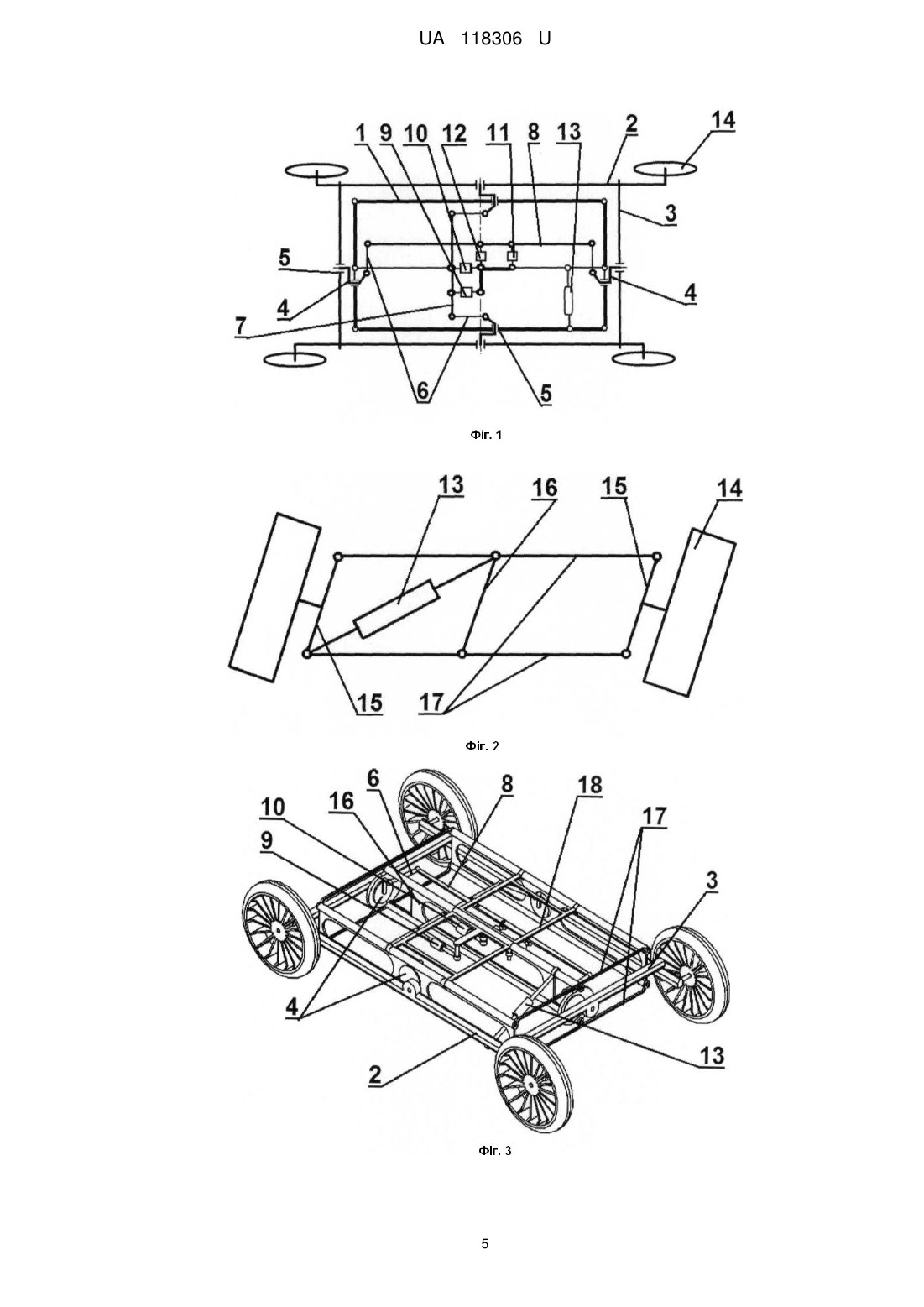
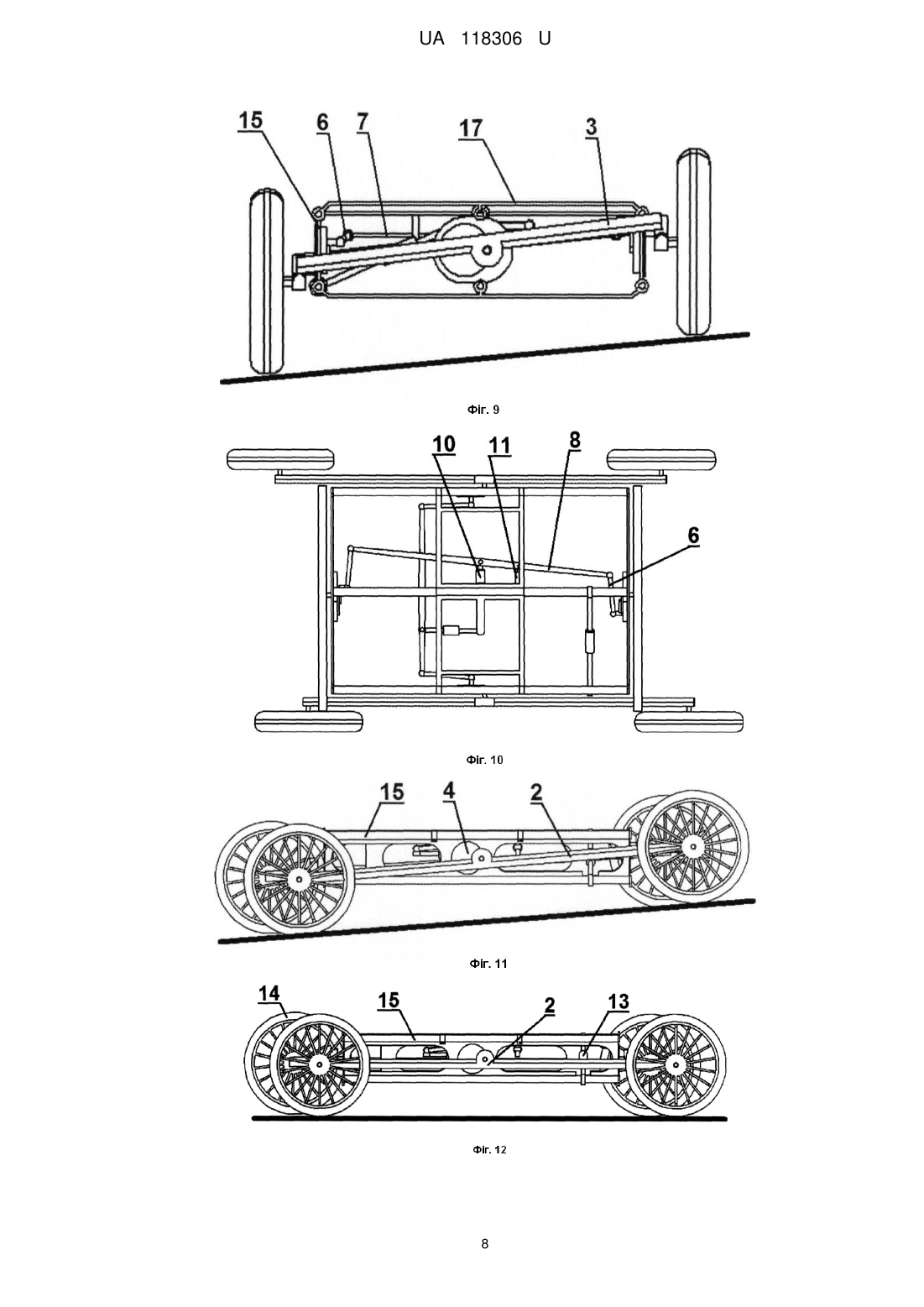
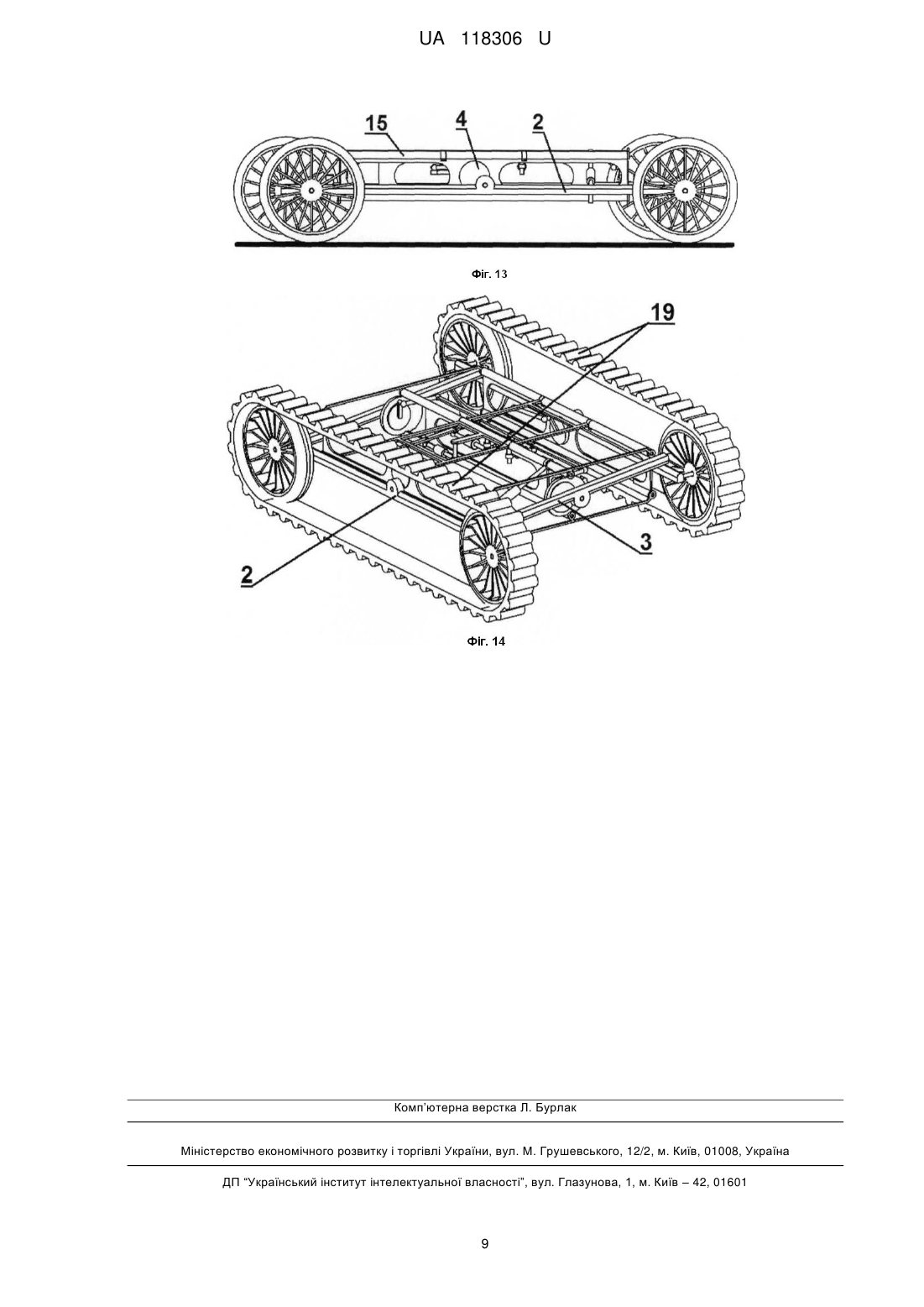
Реферат: Підвіска транспортного засобу містить раму, до протилежних сторін якої своїми центральними зонами прикріплена пара однакових поздовжніх важелів, рухомих відносно площини рами, а кінці поздовжніх важелів призначені для їх з'єднання з відповідними органами руху. Рама виконана рухомою, має форму чотирикутника, кутові зони якого з'єднані шарнірно та містить дві паралельно розташовані боковини, принаймні два з'єднувачі боковин, які разом з боковинами утворюють паралелограм, центральну вставку рами, кінці якої шарнірно з'єднані з центральними ділянками з'єднувачів та ділять раму на два малих паралелограми, а також актуатор рами, який є діагоналлю одного з малих паралелограмів рами. Один кінець актуатора рами шарнірно з'єднаний з одним кутовим шарніром центральної вставки рами, а другий - з кутовим шарніром одної боковини, шарнірно з'єднаним з відповідним кінцем одного з'єднувача боковин. Підвіска доповнена парою однакових поперечних важелів, а кожен важіль прикріплений своєю центральною зоною до центральної ділянки відповідної сторони рами через гумово-металевий шарнір та Г-подібний важіль положення, встановлений в гумовометалевому шарнірі. Поздовжні і поперечні важелі розташовані в одній площині і мають контактні поверхні циліндричної форми для механічного зв'язку один з одним і орієнтовані певним чином. Кожна сторона рухомої рами, встановлена з можливістю обпирання на два суміжних органи руху через відповідний важіль. UA 118306 U (12) UA 118306 U UA 118306 U 5 10 15 20 25 30 35 40 45 50 55 60 Пропонована корисна модель належить до конструктивних елементів транспортних засобів, а більш конкретно - до підвісок як традиційних автомобілів, так і для спеціальних транспортних засобів, серед яких карети швидкої допомоги, дитячі та інвалідні візки, мобільні робототехнічні комплекси на гусеничному ходу для знешкодження вибухонебезпечних предметів, а також до підвісок з поплавками для катамаранів. Пропонована підвіска при її використанні у наземному та водному транспортному засобі надає можливість для автоматичного регулювання кліренсу та нахилу кузова в залежності від стану дорожнього полотна, сили хвилювання моря, швидкості руху транспортного засобу та виконуваного маневру. Пропонована підвіска при використанні в конструкції катамарана дозволяє суттєво зменшити амплітуду розкачування на хвилях, ніж традиційний катамаран, а завдяки цьому має підвищену стійкість до перевертання і більшу швидкість руху. AFW - абревіатура від слогана: "always on four wheels", який можна перекласти з англійської як "завжди на чотирьох колесах". Кліренс або дорожній просвіт - це відстань від поверхні землі до самої низької точки центральної частини наземного транспортного засобу. Від значення кліренсу залежить керованість транспортного засобу в умовах певної швидкості руху та стану дорожнього полотна. Підвіска автомобіля або система підресорювання - це сукупність деталей, вузлів та механізмів, які грають роль з'єднувальної ланки між кузовом транспортного засобу - автомобіля та дорогою. Органи руху в пропонованій заявці - це або колеса, або гусениці, або лижі наземного транспортного засобу, або поплавки судів - катамаранів. Найбільш близькою до пропонованої корисної моделі за результатом, що досягається, є підвіска транспортного засобу, яка містить раму, до якої своїми центральними зонами прикріплена пара однакових поздовжніх важелів, рухомих відносно площини рами, а кінці поздовжніх важелів призначені для їх з'єднання з відповідними органами руху [Patent Number 4,840,394 US, IPC 4 B62D 21/00, Date of Patent: June 20, 1989]. На кінці кожного поздовжнього важеля встановлено качалку, призначену для з'єднання її кінців з двома колесами - робочим та додатковим. Згадана конструкція за рахунок додаткових коліс підвищує стійкість транспортного засобу при поворотах та нахилах кузова під час руху. Проте, наявність додаткових коліс суттєво ускладнює конструкцію, збільшує масу та підвищує її собівартість, що обмежує широке застосування такої підвіски. Крім того, описана підвіска не забезпечує необхідної плавності та стійкості під час руху, оскільки не дозволяє змінювати кліренс в залежності від стану дорожнього полотна та швидкості транспортного засобу. Це твердження базується на тому, що довжина важелів підвіски обмежена та залежить від величини колісної бази. Крім того, різниця в траєкторіях руху робочих коліс одної осі, наприклад при поворотах транспортного засобу - при великих значеннях крутного моменту - може призводити до дестабілізації положення кузова, закріпленого на рамі. Також в згаданій конструкції підвіски ускладнено з'єднання коліс з трансмісією. Тому в основу пропонованого винаходу поставлена задача створення такої підвіски транспортного засобу, яка була б менш матеріаломісткою і одночасно забезпечувала б підвищену стійкість і плавність руху як наземних транспортних засобів на автомагістралях, швидкісних та звичайних дорогах і в умовах бездоріжжя, так і катамаранів на поплавках в морі, а також підвищену стійкість мобільних робототехнічних комплексів на гусеничному ходу при подоланні перешкод під час знешкодження вибухонебезпечних предметів. Поставлена задача вирішується шляхом створення умов для збереження положення рухомої рами з кузовом відносно поверхні дороги (ґрунту) за рахунок з'єднання протилежних по діагоналі кутів рами лінійним актуатором, призначеним для зміни форми рами в залежності від положення органів руху. Пропонована, як і відома підвіска транспортного засобу, містить раму, до протилежних сторін якої своїми центральними зонами прикріплена пара однакових поздовжніх важелів, рухомих відносно площини рами, а кінці поздовжніх важелів призначені для їх з'єднання з відповідними органами руху, а, згідно з пропонованою корисною моделлю, рама виконана рухомою, має форму чотирикутника, кутові зони якого з'єднані шарнірно і містить дві паралельно розташовані боковини, принаймні, два з'єднувачі боковин, які разом з боковинами утворюють паралелограм, центральну вставку рами, кінці якої шарнірно з'єднані з центральними ділянками з'єднувачів та ділять раму на два малих паралелограми, а також актуатор рами, який є діагоналлю одного з малих паралелограмів рами, один кінець актуатора рами шарнірно з'єднаний з одним кінцем центрального важеля рами, а другий - з кінцем одної боковини, шарнірно з'єднаним з відповідним кінцем одного з'єднувача боковин, підвіска доповнена парою однакових поперечних важелів, а кожен важіль прикріплений своєю 1 UA 118306 U 5 10 15 20 25 30 35 40 45 50 55 60 центральною зоною до центральної ділянки відповідної сторони рами через гумово-металевий шарнір і Г-подібний важіль положення, встановлений в гумово-металевому шарнірі, поздовжні і поперечні важелі розташовані в одній площині і мають контактні поверхні циліндричної форми для механічного зв'язку один з одним і орієнтовані наступним чином: поздовжній лівий і правий - контактною поверхнею вгору, поперечний передній і задній контактною поверхнею вниз, контактні поверхні одного важеля дотичні до площини, що проходить через вісь обертання важеля та розташовані по одну сторону від неї, а кожна сторона рухомої рами, встановлена з можливістю обпирання на два суміжні органи руху через відповідний важіль. Особливістю пропонованої підвіски є і те, що її органи руху виконані або у вигляді коліс, або гусениць, або лиж, або поплавків катамарана. Пропонована підвіска забезпечує постійний рівномірний розподіл ваги транспортного засобу по всіх чотирьох органах руху - може, наприклад, зберігати практично постійний коефіцієнт зчеплення для всіх коліс, незалежно від кривизни дорожнього полотна. Пропонована підвіска забезпечує можливість автоматичного регулювання кліренсу та нахилу кузова в залежності від стану дорожнього полотна, сили хвилювання моря, швидкості руху транспортного засобу та виконуваного маневру. При русі вздовж схилу може виконувати нахили рами з кузовом при поворотах, підйомах та для висадки пасажирів. Може бути укомплектована асиметричними поздовжніми важелями для підвищеної комфортності, наприклад, в конструкції дитячого чи інвалідного візка. Пропонована підвіска складається з чотирикутної рухомої рами, пари однакових поздовжніх важелів, пари однакових поперечних важелів, чотирьох важелів положення, двох качалок і п'яти лінійних актуаторів (гідравлічних чи електричних). Органи руху (колеса) кріпляться до кінців поздовжніх важелів. Поздовжні важелі мають симетричну (асиметричну) конструкцію з отвором у центрі і кріпляться до чотирикутної рухомої рами через Г-подібні важелі положення та гумовометалеві шарніри. Поперечні важелі мають симетричну конструкцію з отвором в центрі і кріпляться до чотирикутної рами через важелі положення та гумово-металеві шарніри. Поздовжні і поперечні важелі розташовані в площині, паралельній дорожньому полотну і мають контактні поверхні циліндричної форми для механічного зв'язку один з одним і орієнтовані наступним чином: поздовжній лівий і правий - контактною поверхнею вгору, поперечний передній і задній - контактною поверхнею вниз. Контактні поверхні одного важеля дотичні до площини, що проходить через вісь обертання важеля і розташовані по одну сторону від неї. Кожна сторона рухомої рами, через відповідний важіль, спирається на два органи руху (колеса). Така орієнтація важелів дозволяє передавати вагу транспортного засобу на чотири органи руху (колеса) і виконувати контроль положення рухомої рами з кузовом при русі по нерівній поверхні. У підвісці використовують рухому раму з Г-подібними важелями положення, тягами зв'язку, качалками, а також механізми переміщення - лінійні актуатори. Таке рішення дає можливість встановлювати раму з кузовом транспортного засобу під різними кутами і регулювати кліренс. Гподібні важелі положення, попарно, бокові правий і лівий, а також передній і задній з'єднані тягами та качалками і забезпечені двома лінійними актуаторами кожен для можливості зміни кутів встановлення кузова і кліренса. Рухома рама зі встановленим по діагоналі лінійним актуатором дає змогу позиціонувати раму з кузовом відносно поверхні дороги (ґрунту). Асиметрична форма поздовжніх важелів, при якій колеса одного моста зсунуті відносно осі в горизонтальній площині, дає можливість комфортніше долати перешкоди. Оскільки праві і ліві колеса попарно закріплені на монолітних поздовжніх важелях, їх можна замінити гусеницями, лижами чи поплавками, отримуючи, таким чином, транспортний засіб або на колесах, або на гусеничному ходу, або на лижному ходу, або катамаран на поплавках. В процесі проведення патентно-інформаційних досліджень при підготовці даної заявки авторами не виявлені конструкції підвісок транспортных засобів з вказаною вище сукупністю суттєвих ознак, що доводить відповідність технічного рішення, що заявляється, критерію корисної моделі "новизна"., Технічний результат, отриманий в результаті здійснення пропонованого винаходу, полягає в створенні умов для позиціонування відносно поверхні переміщення рами транспортного засобу зі встановленим на ній кузовом за рахунок її виконання у вигляді рухомого чотирикутника, кутові зони якого з'єднані шарнірно, а протилежні по діагоналі кути рами з'єднані лінійним актуатором, призначеним для зміни форми рами в залежності від положення органів руху, що дозволяє підвищити плавність ходу при поворотах транспортного засобу, його русі по пересіченій місцевості та підвищує надійність підвіски. Пропонована підвіска при використанні для наземного і водного транспортного засобу забезпечує можливість автоматичного регулювання 2 UA 118306 U 5 10 15 20 25 30 35 40 45 50 55 кліренсу і нахилу кузова в залежності від стану дорожнього полотна, сили хвилювання моря, швидкості руху транспортного засобу та виконуваного маневра. Вказаний технічний результат у відомих технічних рішеннях, які увійшли в рівень техніки, авторами не виявлено. Пропонована підвіска транспортного засобу складається з конструктивних елементів, для виготовлення яких використовують відомі на сьогодні технологічні прийоми, засоби і матеріали. Вона може бути використана в транспортних засобах, які належать до різних галузей народного господарства - в традиційних автомобілях, в спеціальних транспортних засобах, серед яких карети швидкої допомоги, дитячі і інвалідні візки, мобільні робототехнічні комплекси на гусеничному ходу, а також підвіски з поплавками для катамаранів, а тому можна зробити висновок про те, що пропоноване рішення відповідає критерію корисної моделі "промислова придатність". Суть пропонованої корисної моделі пояснюється за допомогою схематичних креслень, на яких показані: Фіг. 1 - кінематична схема підвіски "AFW-6", в якій органи руху виконані у вигляді коліс, Фіг. 2 - кінематична схема рухомої рами, вигляд спереду, Фіг. 3, 4, 5 - загальний вигляд підвіски, Фіг. 6, 7, 8, 9 - процес нахилу кузова вправо (вліво), Фіг. 9, 10 - процес нахилу кузова вперед (назад), Фіг. 12, 13 - процес зміни кліренсу, Фіг. 14 - кінематична схема підвіски "AFW-6", в якій органи руху виконані у вигляді гусениць. Як приклад розглянемо пропоновану підвіску "AFW-6" транспортного засобу "AFW-6", призначену для використання в конструкції автомобіля. Підвіска транспортного засобу "AFW-6" (фіг. 1, 2, 3, 4) складається з рухомої рами 1 з кузовом /не показано/, двох поздовжніх важелів 2, двох поперечних важелів 3, Неподібних важелів положення 4 з гумово-металевими шарнірами 5 (показані умовно), тяг зв'язку 6, качалок 7 і 8, однакових лінійних актуаторів 9, 10, 11, 12, лінійного актуатора рами 13 і коліс 14. Для розширення можливостей підвіски рухома рама 1 містить дві боковини 15, центральну частину 16, з'єднувачі 17 і вставку 18. З'єднувачі 17 разом з боковинами 15, центральною частиною 16, і вставкою 18 утворюють паралелограм (фіг. 2, 3, 4). Поздовжній важіль 2 і поперечний важіль 3 в місці контакту мають циліндричну форму. Підвіска забезпечена також традиційним рульовим механізмом /не показано/, системою управління /не показано/, призначеною для керування лінійними актуаторами 9, 10, 11, 12, 13. Система управління містить бортовий комп'ютер, датчики швидкості, положення керма, а також прискорення і нахилу рухомої рами 1 /не показано/. Виходи датчиків швидкості, положення керма, а також прискорення і нахилу рами підключені до відповідних входів бортового комп'ютера, а виходи бортового комп'ютера підключені до рушіїв лінійних актуаторів 9, 10, 11, 12, 13 /не показано/. Як бортовий комп'ютер може бути використаний промисловий контролер з відповідним програмним забезпеченням. Підвіска транспортного засобу "AFW-6" працює наступним чином. Попередньо, для правильної роботи підвіски при її складанні, поперечні важелі 3 встановлюють над поздовжніми важелями 2 для забезпечення їх контакту, а Г-подібні важелі положення 4 фіксують у середньому положенні за допомогою лінійних актуаторів 9, 10, 11, 12. Одночасно, отримуючи певні сигнали з датчиків, налаштовують на роботу систему управління Під дією гравітації підвіска транспортного засобу самовстановлюється та рівномірно розподіляє свою вагу по чотирьох колесах (чотирьох точках опори) (фіг. 12, 13). Поздовжні важелі 2 і поперечні важелі 3 можуть вільно провертатися під час руху, завдяки гумово-металевим шарнірам 5 (показані умовно), при наїзді колеса 14 одного мосту на перешкоду. Наїзд колеса 14 одного мосту на перешкоду призводить до зміни положення поздовжніх 2 і поперечних 3 важелів та до зміни просторового положення рухомої рами 1, а внаслідок цього під дією гравітації підвіска транспортного засобу самовстановлюється і рівномірно розподіляє свою вагу по чотирьох колесах 14. При цьому рухома рама 1 займає положення усередненої площини для чотирьох точок дотику коліс 14. Працездатність підвіски зберігається доти, доки поздовжні 2 і поперечні 3 важелі знаходяться в зачепленні. Дрібні перешкоди підвіска долає, завдяки пружинним властивостям поздовжніх 2 і поперечних 3 важелів підвіски та гумово-металевим шарнірам 5, а також коліс 14. Зміна довжини лінійного актуатора 13 рами призводить до нахилу її боковин 15 та центральної частини 16 вправо (вліво) (фіг. 2, 6, 8), що забезпечує зміщення у вертикальній площині коліс 14, встановлених на поздовжніх важелях 2. При цьому з'єднувачі 17 залишаються паралельними поверхні дороги (ґрунту) (фіг. 6). Зміна довжини лінійного актуатора 9, при 3 UA 118306 U 5 10 15 20 25 30 35 40 45 постійній довжині лінійного актуатора 10, 11 і 12, призводить до додаткової (вправо чи вліво) зміни положення рухомої рами 1 з кузовом (фіг. 7, 8). Зміна довжини лінійного актуатора 11, при постійній довжині лінійних актуаторів 9, 10, 12, призводить до нахилу (вперед чи назад) кузова (фіг. 10, 11). Синхронна зміна довжин лінійних актуаторів 9, 10, 11, 12 призводить до зміни кліренсу (збільшенню чи зменшенню) (фіг. 5, 12, 13). На базі підвіски AFW-6 можуть бути створені: - дитячі та інвалідні моторизовані візки, - транспортні засоби на гусеничному ходу, - легкові автомобілі як з традиційними ДВЗ, так і з електрорушієм. Використання підвіски AFW в легковому автомобілі дасть значну економію матеріалів (до 20 % по вазі) за рахунок застосування пласкої несучої конструкції. При цьому просто реалізується проходження поворотів з нахилом рухомої рами 1 з кузовом (як мотоцикл); - квадромаран, гольфкар, візок для відеокамери, місяцехід і так далі. Підвіска повністю працездатна при встановленні всіх чотирьох коліс різного діаметра. Спирання на дорогу (ґрунт) одночасно всіма чотирма колесами 14 з рівномірним розподілом ваги транспортного засобу досягається без пружних елементів, а лише за рахунок сил гравітації та кінематичного зв'язку конструктивних елементів підвіски між собою. Пропонована підвіска в конструкції катамарана працює аналогічно підвісці в наземному транспортному засобі. Зміна висоти мосту катамарана над поверхнею води (кліренсу) дає можливість долати більш високі хвилі. Нахил палуби при повороті дозволяє уникнути бічного ковзання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Підвіска транспортного засобу, що містить раму, до протилежних сторін якої своїми центральними зонами прикріплена пара однакових поздовжніх важелів, рухомих відносно площини рами, а кінці поздовжніх важелів призначені для їх з'єднання з відповідними органами руху, яка відрізняється тим, що рама виконана рухомою, має форму чотирикутника, кутові зони якого з'єднані шарнірно та містить дві паралельно розташовані боковини, принаймні два з'єднувачі боковин, які разом з боковинами утворюють паралелограм, центральну вставку рами, кінці якої шарнірно з'єднані з центральними ділянками з'єднувачів та ділять раму на два малих паралелограми, а також актуатор рами, який є діагоналлю одного з малих паралелограмів рами, один кінець актуатора рами шарнірно з'єднаний з одним кутовим шарніром центральної вставки рами, а другий - з кутовим шарніром одної боковини, шарнірно з'єднаним з відповідним кінцем одного з'єднувача боковин, підвіска доповнена парою однакових поперечних важелів, а кожен важіль прикріплений своєю центральною зоною до центральної ділянки відповідної сторони рами через гумово-металевий шарнір та Г-подібний важіль положення, встановлений в гумово-металевому шарнірі, поздовжні і поперечні важелі розташовані в одній площині і мають контактні поверхні циліндричної форми для механічного зв'язку один з одним і орієнтовані наступним чином: поздовжній лівий і правий - контактною поверхнею вгору, поперечний передній і задній - контактною поверхнею вниз, контактні поверхні одного важеля дотичні до площини, що проходить через вісь обертання важеля і розташовані по одну сторону від неї, а кожна сторона рухомої рами, встановлена з можливістю обпирання на два суміжних органи руху через відповідний важіль. 2. Підвіска за п. 1, яка відрізняється тим, що її органи руху виконані або у вигляді коліс, або гусениць, або лиж, або поплавків катамарана. 4 UA 118306 U 5 UA 118306 U 6 UA 118306 U 7 UA 118306 U 8 UA 118306 U Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60G 99/00, B60G 21/00, B63B 3/00
Мітки: підвіска, засобу, afw-6, транспортного
Код посилання
<a href="https://ua.patents.su/11-118306-pidviska-transportnogo-zasobu-afw-6.html" target="_blank" rel="follow" title="База патентів України">Підвіска транспортного засобу “afw-6″</a>
Підвіска колеса транспортного засобу
Номер патенту: 64562
Опубліковано: 10.11.2011
Автори: Малащенко Володимир Олександрович, Ніколайчук Василь Михайлович, Ніколайчук Валерій Васильович
МПК: B60G 11/00
Мітки: підвіска, засобу, транспортного, колеса
Формула / Реферат:
Підвіска колеса транспортного засобу, що містить дві концентрично розміщені пружини, шарнірно з'єднані через фланці з одного боку з колесом, а з іншого - з рамою, яка відрізняється тим, що в нижній частині підвіски розташовано регулювальний пристрій, який складається з корпусу, шайби та гайки, з можливістю попереднього стискання допоміжної пружини, або установки зазору перед верхнім фланцем.
Підвіска транспортного засобу

Номер патенту: 34334
Опубліковано: 15.02.2001
Автори: Гончарова Ольга Євгенівна, Гончаров Євгеній Констянтинович, Становський Олександр Леонідович, Балан Сергій Олександрович, Максимов Валерій Григорович
МПК: B60G 1/00
Мітки: підвіска, транспортного, засобу
Текст:
...6, а також драбини 7, що стягують пакет за допомогою гайок 8, при цьому балка 5 неведучої осі встановлена в направляючій 9 з можливістю повороту відносно подовжньої геометричної осі в обидві сторони і, для повернення в початкове положення, сполучена при допомозі зацепа 10 з пружним елементом 11, діаметрально протилежна частина якого зв'язана із зацепом 12 верхньої накладки 1. Підвіска працює таким чином. При русі транспортного засобу...
Підвіска транспортного засобу для моніторингу стану сільськогосподарських угідь
Номер патенту: 57747
Опубліковано: 10.03.2011
Автор: Броварець Олександр Олександрович
МПК: B62D 21/00
Мітки: угідь, транспортного, підвіска, стану, моніторингу, засобу, сільськогосподарських
Формула / Реферат:
Підвіска транспортного засобу для моніторингу стану сільськогосподарських угідь, що містить передню, задню піврами, які пружними елементами з'єднані з платформою, яка відрізняється тим, що додатково має демпферні елементи, які розміщені у передній керованій вилці та під кутом до горизонтальної поверхні руху між платформою та задньою піврамою.
Маятникова підвіска нерозрізного моста транспортного засобу

Номер патенту: 32619
Опубліковано: 15.02.2001
Автори: Тайх Міхаель, Альтерр Аугуст, Гельб Херберт
МПК: B60G 9/00
Мітки: маятникова, підвіска, транспортного, нерозрізного, моста, засобу
Текст:
...виконаний таким чином, що він допускає відносне переміщення зачепіа (38, 84 і/або 44, 86) один до одного, однак обмежує максимальну і/або мінімальну відстань між зачепами (38, 84 і/або 44, 86). 2. Маятникова підвіска по п.1 , яка відрізняється тим , що лі нія (9 1), що з 'єдн ує зачеп и (84 і 86 ) .моста і зачепи (38 і 44 ) ша сі, роз та шо вана в ос новному поперечно подовжній осі транспортного засобу і поперечно пр ужин (68 І 70) пр...
Підвіска гусеничного транспортного засобу
Номер патенту: 18397
Опубліковано: 15.11.2006
Автори: Медведєв Микола Григорович, Абляскін Олег Ібрагімович, Єпіфанов Віталій Валерійович, Воронцов Сергій Миколайович
МПК: F16F 5/00
Мітки: засобу, транспортного, гусеничного, підвіска
Формула / Реферат:
Підвіска гусеничного транспортного засобу, яка містить опорний каток, розташований на малій осі балансира, велика вісь якого встановлена з можливістю повороту відносно корпусу транспортного засобу, та торсіонний вал, один з кінців якого закріплений в корпусі, яка відрізняється тим, що на вільному кінці торсіонного вала співвісно розміщена ведена шестірня передачі з некруглими зубчастими колесами, ведуча шестірня якої співвісно розміщена на...
Попередній патент: Спосіб лікування загрозливого аборту у жінок залежно від поліморфізму гена рецептора прогестерону rs590688
Наступний патент: Транспортний засіб на комбінованому ходу
Випадковий патент: Спосіб хіміко-термічної обробки інструменту