Пристрій для вимірювання змін тяги плазмового ракетного двигуна із замкненим дрейфом електронів
Номер патенту: 41889
Опубліковано: 15.10.2001
Автори: Харчєвніков Вадім, Бугрова Антоніна, Морозов Алєксєй, Валєнтайен Домінік
Формула / Реферат
1. Устройство для измерения изменений тяги плазменного ракетного двигателя с замкнутым дрейфом электронов, содержащего главный кольцевой канал ионизации и ускорения /24/, по меньшей мере один полый катод /40/, располагающийся снаружи по отношению к этому главному каналу за его выходной частью, один анод /25/, средства подачи ионизируемого газа /41, 26/, объединенные соответственно с полым катодом /40/ и с анодом /25/, и средства /31, 32, 33/ создания магнитного поля, отличающееся тем, что содержит множество датчиков магнитного потока /101, 102, 103, 104/, расположенных вокруг ускорительного канала /24/ множество усилителей /111, 112, 113, 114/, на входы которых подаются соответственно сигналы, выдаваемые упомянутыми выше датчиками магнитного потока /101, 102, 103, 104/, и суммирующий контур /115/, входы которого соединены с выходами упомянутых выше усилителей /111, 112, 113, 114/.
2. Устройство по п.1, отличающееся тем, что содержит дополнительно множество контуров уравновешивания /121, 122, 123, 124/, включенных между выходами усилителей /111, 112, 113, 114/ и суммирующим контуром /115/, причем каждый контур уравновешивания /121, 122, 123, 124/ осуществляет уравновешивание сигнала, выдаваемого соответствующим усилителем, при помощи некоторого коэффициента, определяемого в процессе калибровки.
3. Устройство по п.2, отличающееся тем, что его калибровка обеспечивается при помощи витка /170/, способного занимать множество различных положений /171, 172/ по оси ускорительного канала /24/ внутри него для определения коэффициентов уравновешивания, используемых в контурах уравновешивания /121, 122, 123, 124/.
4. Устройство по любому из пунктов 1-3, отличающееся тем, что содержит дополнительно интегрирующие контуры /150/, связанные с усилителями /111, 112, 113, 114/ и предназначенные для выдачи непосредственно изображения или контура тяги.
5. Устройство по любому из пунктов 1-3, отличающееся тем, что дополнительно содержит интегрирующий контур /187/, подключенный к выходу суммирующего контура /115, 186/ и предназначенный для выдачи непосредственно изображения или контура тяги.
6. Устройство по любому из пунктов 1-5, отличающееся тем, что дополнительно содержит множество аналого-цифровых преобразователей /183а, 183б/, располагающихся на соответствующих, выходах усилителей /111, 112, 113, 114, 182а, 182б/, и устройство уплотнения линий связи или мультиплексор /184/, на входы которого подаются сигналы, выдаваемые аналого-цифровыми преобразователями /183а, 183б/, и выход которого соединен с входом суммирующего контура /115, 186/, для формирования выходного сигнала в цифровой форме.
7. Устройство по любому из пунктов 1-6, отличающееся тем, что упомянутые выше датчики магнитного потока /101, 102, 103, 104/ образованы катушками, располагающимися вокруг ускорительного канала /24/.
8. Устройство по п.7, отличающееся тем, что содержит множество катушек, служащих датчиками магнитного потока /101, 104, 102, 103/ и расположенных коаксиально по отношению к ускорительному, каналу /24/ в различных радиальных плоскостях этого ускорительного канала /24/.
9. Устройство по п.7, отличающееся тем, что по меньшей мере некоторые из упомянутых выше датчиков магнитного потока образованы катушками /31, 32, 33/, запитываемыми постоянным током и составляющими часть упомянутых выше средств создания магнитного поля, а также тем, что эти датчики магнитного потока, образованные катушками /31, 32, 33/, запитываемыми постоянным током, соединены с соответствующими усилителям /111/ через фильтр /163/, устраняющий постоянную составляющую.
10. Устройство по любому из пунктов 1-9, отличающееся тем, что сигналы, выдаваемые суммирующим контуром /115, 186, 195/, подаются в контур отрицательной обратной связи /190, 196/ цепи управления регулировочным клапаном /191/ средств /41, 26/ подачи ионизируемого газа таким образом, чтобы поддерживать тягу данного двигателя постоянной и равной некоторой заданной величине.
11. Устройство по п.10, отличающееся тем, что контур отрицательной обратной связи /190/ выполнен в цифровом виде и заданная величина тяги сохраняется в запоминающем устройстве /189/.
12. Устройство по п.10, отличающееся тем, что контур отрицательной обратной связи /196/ выполнен в аналоговом виде и заданная величина тяги выдается с массового расходомера /197/, связанного со средствами /41, 26/ подачи ионизируемого газа.
Текст
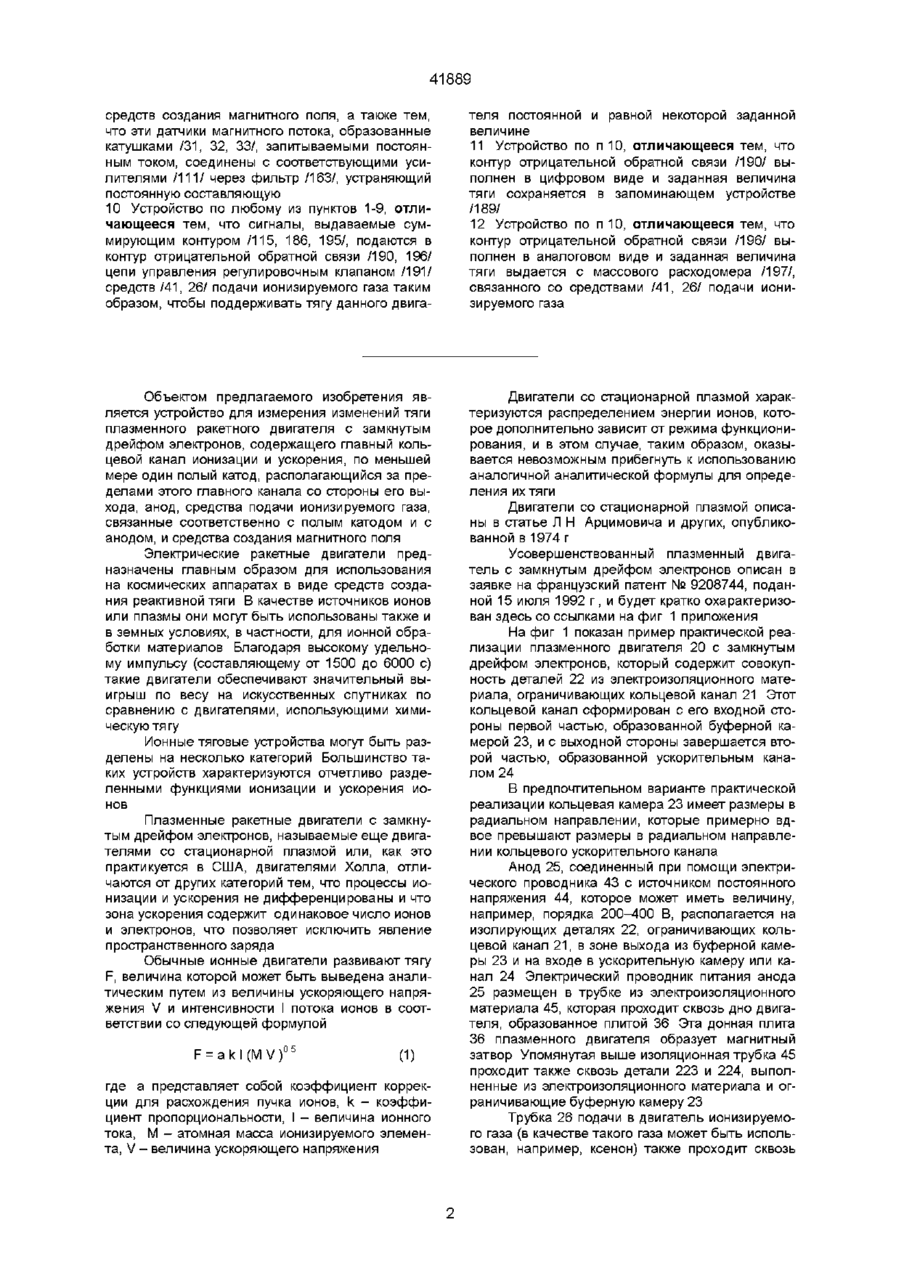
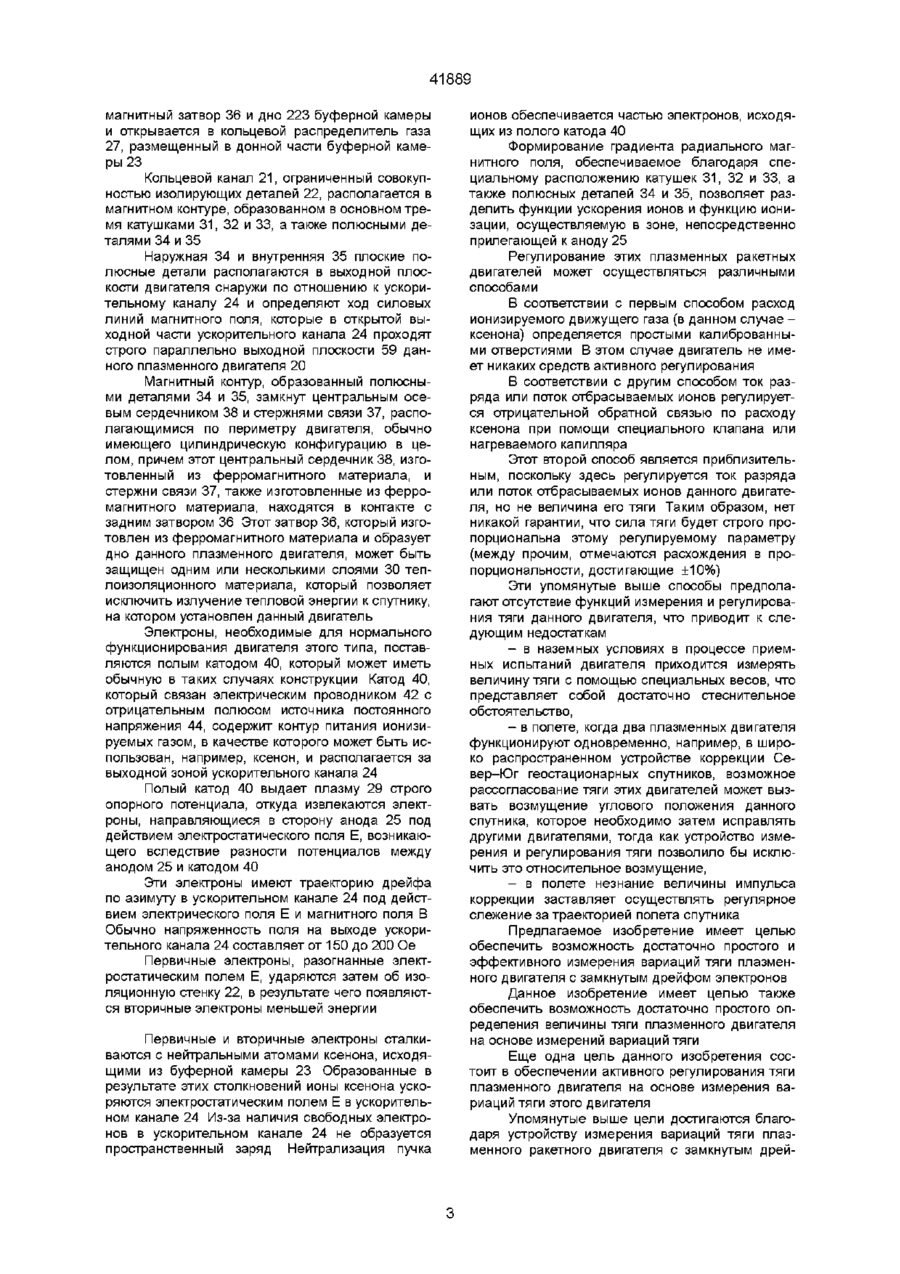
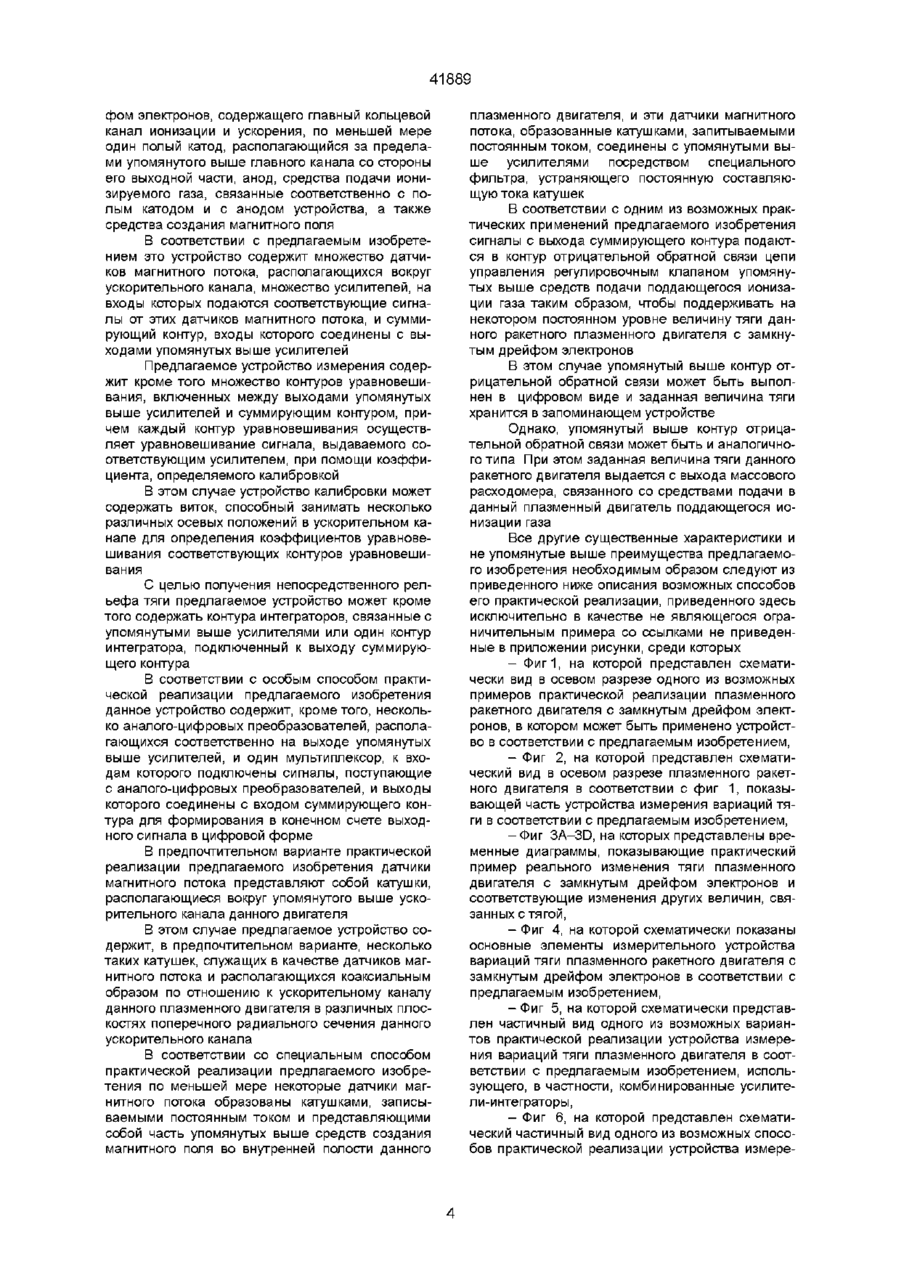
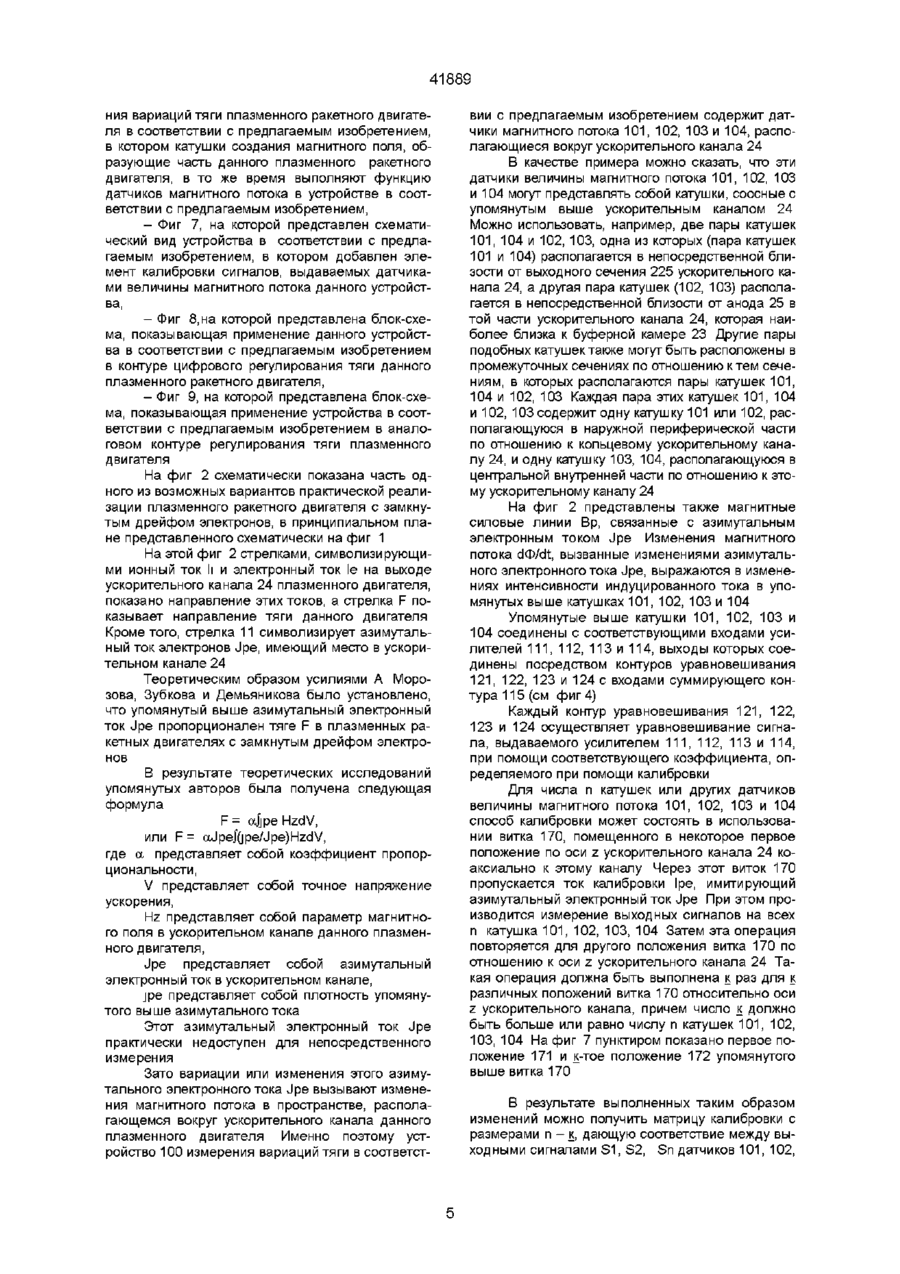
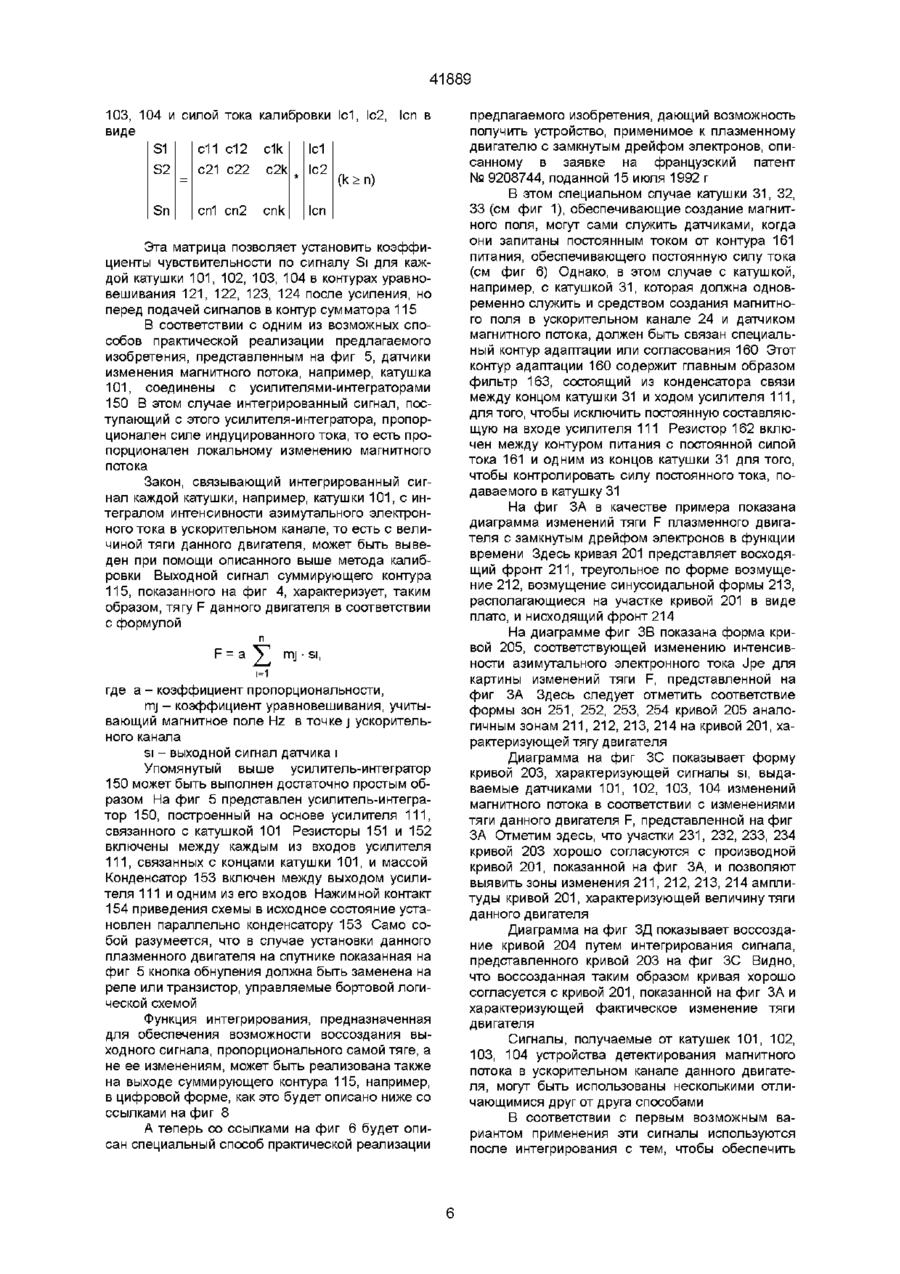
1 Устройство для измерения изменений тяги плазменного ракетного двигателя с замкнутым дрейфом электронов, содержащего главный кольцевой канал ионизации и ускорения /24/, по меньшей мере один полый катод /40/, располагающийся снаружи по отношению к этому главному каналу за его выходной частью, один анод /25/, средства подачи ионизируемого газа /41, 26/, объединенные соответственно с полым катодом /40/ и с анодом /25/, и средства /31, 32, 33/ создания магнитного поля, отличающееся тем, что содержит множество датчиков магнитного потока /101, 102, 103, 104/, расположенных вокруг ускорительного канала /24/, множество усилителей /111, 112, 113, 114/, на входы которых подаются соответственно сигналы, выдаваемые упомянутыми выше датчиками магнитного потока /101, 102, 103, 104/, и суммирующий контур/115/, входы которого соединены с выходами упомянутых выше усилителей/111, 112, 113, 114/ 2 Устройство по п 1, отличающееся тем, что содержит дополнительно множество контуров уравновешивания /121, 122, 123, 124/, включенных между выходами усилителей /111, 112, 113, 114/ и суммирующим контуром /115/, причем каждый контур уравновешивания /121, 122, 123, 124/ осуществляет уравновешивание сигнала, выдаваемого соответствующим усилителем, при помощи не Зоя которого коэффициента, определяемого в процессе калибровки 3 Устройство по п 2, отличающееся тем, что его калибровка обеспечивается при помощи витка /170/, способного занимать множество различных положений /171, 172/ по оси ускорительного канала /24/ внутри него для определения коэффициентов уравновешивания, используемых в контурах уравновешивания/121, 122, 123, 124/ 4 Устройство по любому из пунктов 1-3, отличающееся тем, что содержит дополнительно интегрирующие контуры /150/, связанные с усилителями /111, 112, 113, 114/ и предназначенные для выдачи непосредственно изображения или контура тяги 5 Устройство по любому из пунктов 1-3, отличающееся тем, что дополнительно содержит интегрирующий контур/187/, подключенный к выходу суммирующего контура /115, 186/ и предназначенный для выдачи непосредственно изображения или контура тяги 6 Устройство по любому из пунктов 1-5, отличающееся тем, что дополнительно содержит множество аналого-цифровых преобразователей /183а, 1836/, располагающихся на соответствующих выходах усилителей /111, 112, 113, 114, 182а, 1826/, и устройство уплотнения линий связи или мультиплексор /184/, на входы которого подаются сигналы, выдаваемые аналого-цифровыми преобразователями /183а, 1836/, и выход которого соединен с входом суммирующего контура /115, 186/, для формирования выходного сигнала в цифровой форме 7 Устройство по любому из пунктов 1-6, отличающееся тем, что упомянутые выше датчики магнитного потока/101, 102, 103, 104/образованы катушками, располагающимися вокруг ускорительного канала /24/ 8 Устройство по п 7, отличающееся тем, что содержит множество катушек, служащих датчиками магнитного потока /101, 104, 102, 103/ и расположенных коаксиально по отношению к ускорительному каналу /24/ в различных радиальных плоскостях этого ускорительного канала /24/ 9 Устройство по п 7, отличающееся тем, что по меньшей мере некоторые из упомянутых выше датчиков магнитного потока образованы катушками /31, 32, 33/, запитываемыми постоянным током и составляющими часть упомянутых выше О 00 00 41889 средств создания магнитного поля, а также тем, что эти датчики магнитного потока, образованные катушками /31, 32, 33/, запитываемыми постоянным током, соединены с соответствующими усилителями /111/ через фильтр /163/, устраняющий постоянную составляющую 10 Устройство по любому из пунктов 1-9, отличающееся тем, что сигналы, выдаваемые суммирующим контуром /115, 186, 195/, подаются в контур отрицательной обратной связи /190, 196/ цепи управления регулировочным клапаном /191/ средств /41, 26/ подачи ионизируемого газа таким образом, чтобы поддерживать тягу данного двига теля постоянной и равной некоторой заданной величине 11 Устройство по п 10, отличающееся тем, что контур отрицательной обратной связи /190/ выполнен в цифровом виде и заданная величина тяги сохраняется в запоминающем устройстве /189/ 12 Устройство по п 10, отличающееся тем, что контур отрицательной обратной связи /196/ выполнен в аналоговом виде и заданная величина тяги выдается с массового расходомера /197/, связанного со средствами /41, 26/ подачи ионизируемого газа Объектом предлагаемого изобретения является устройство для измерения изменений тяги плазменного ракетного двигателя с замкнутым дрейфом электронов, содержащего главный кольцевой канал ионизации и ускорения, по меньшей мере один полый катод, располагающийся за пределами этого главного канала со стороны его выхода,анод, средства подачи ионизируемого газа, связанные соответственно с полым катодом и с анодом, и средства создания магнитного поля Электрические ракетные двигатели предназначены главным образом для использования на космических аппаратах в виде средств создания реактивной тяги В качестве источников ионов или плазмы они могут быть использованы также и в земных условиях, в частности, для ионной обработки материалов Благодаря высокому удельному импульсу (составляющему от 1500 до 6000 с) такие двигатели обеспечивают значительный выигрыш по весу на искусственных спутниках по сравнению с двигателями, использующими химическую тягу Ионные тяговые устройства могут быть разделены на несколько категорий Большинство таких устройств характеризуются отчетливо разделенными функциями ионизации и ускорения ионов Плазменные ракетные двигатели с замкнутым дрейфом электронов, называемые еще двигателями со стационарной плазмой или, как это практикуется в США, двигателями Холла, отличаются от других категорий тем, что процессы ионизации и ускорения не дифференцированы и что зона ускорения содержит одинаковое число ионов и электронов, что позволяет исключить явление пространственного заряда Обычные ионные двигатели развивают тягу F, величина которой может быть выведена аналитическим путем из величины ускоряющего напряжения V и интенсивности I потока ионов в соответствии со следующей формулой Двигатели со стационарной плазмой характеризуются распределением энергии ионов, которое дополнительно зависит от режима функционирования, и в этом случае, таким образом, оказывается невозможным прибегнуть к использованию аналогичной аналитической формулы для определения их тяги Двигатели со стационарной плазмой описаны в статье Л Н Арцимовича и других, опубликованной в 1974 г Усовершенствованный плазменный двигатель с замкнутым дрейфом электронов описан в заявке на французский патент № 9208744, поданной 15 июля 1992 г, и будет кратко охарактеризован здесь со ссылками на фиг 1 приложения На фиг 1 показан пример практической реализации плазменного двигателя 20 с замкнутым дрейфом электронов, который содержит совокупность деталей 22 из электроизоляционного материала, ограничивающих кольцевой канал 21 Этот кольцевой канал сформирован с его входной стороны первой частью, образованной буферной камерой 23, и с выходной стороны завершается второй частью, образованной ускорительным каналом 24 В предпочтительном варианте практической реализации кольцевая камера 23 имеет размеры в радиальном направлении, которые примерно вдвое превышают размеры в радиальном направлении кольцевого ускорительного канала Анод 25, соединенный при помощи электрического проводника 43 с источником постоянного напряжения 44, которое может иметь величину, например, порядка 200-400 В, располагается на изолирующих деталях 22, ограничивающих кольцевой канал 21, в зоне выхода из буферной камеры 23 и на входе в ускорительную камеру или канал 24 Электрический проводник питания анода 25 размещен в трубке из электроизоляционного материала 45, которая проходит сквозь дно двигателя, образованное плитой 36 Эта донная плита 36 плазменного двигателя образует магнитный затвор Упомянутая выше изоляционная трубка 45 проходит также сквозь детали 223 и 224, выполненные из электроизоляционного материала и ограничивающие буферную камеру 23 = ak V) L (1) где а представляет собой коэффициент коррекции для расхождения пучка ионов, к - коэффициент пропорциональности, I - величина ионного тока, М - атомная масса ионизируемого элемента, V - величина ускоряющего напряжения Трубка 26 подачи в двигатель ионизируемого газа (в качестве такого газа может быть использован, например, ксенон) также проходит сквозь 41889 магнитный затвор 36 и дно 223 буферной камеры и открывается в кольцевой распределитель газа 27, размещенный в донной части буферной камеры 23 Кольцевой канал 21, ограниченный совокупностью изолирующих деталей 22, располагается в магнитном контуре, образованном в основном тремя катушками 31, 32 и 33, а также полюсными деталями 34 и 35 Наружная 34 и внутренняя 35 плоские полюсные детали располагаются в выходной плоскости двигателя снаружи по отношению к ускорительному каналу 24 и определяют ход силовых линий магнитного поля, которые в открытой выходной части ускорительного канала 24 проходят строго параллельно выходной плоскости 59 данного плазменного двигателя 20 Магнитный контур, образованный полюсными деталями 34 и 35, замкнут центральным осевым сердечником 38 и стержнями связи 37, располагающимися по периметру двигателя, обычно имеющего цилиндрическую конфигурацию в целом, причем этот центральный сердечник 38, изготовленный из ферромагнитного материала, и стержни связи 37, также изготовленные из ферромагнитного материала, находятся в контакте с задним затвором 36 Этот затвор 36, который изготовлен из ферромагнитного материала и образует дно данного плазменного двигателя, может быть защищен одним или несколькими слоями 30 теплоизоляционного материала, который позволяет исключить излучение тепловой энергии к спутнику, на котором установлен данный двигатель Электроны, необходимые для нормального функционирования двигателя этого типа, поставляются полым катодом 40, который может иметь обычную в таких случаях конструкции Катод 40, который связан электрическим проводником 42 с отрицательным полюсом источника постоянного напряжения 44, содержит контур питания ионизируемых газом, в качестве которого может быть использован, например, ксенон, и располагается за выходной зоной ускорительного канала 24 Полый катод 40 выдает плазму 29 строго опорного потенциала, откуда извлекаются электроны, направляющиеся в сторону анода 25 под действием электростатического поля Е, возникающего вследствие разности потенциалов между анодом 25 и катодом 40 Эти электроны имеют траекторию дрейфа по азимуту в ускорительном канале 24 под действием электрического поля Е и магнитного поля В Обычно напряженность поля на выходе ускорительного канала 24 составляет от 150 до 200 Ое Первичные электроны, разогнанные электростатическим полем Е, ударяются затем об изоляционную стенку 22, в результате чего появляются вторичные электроны меньшей энергии Первичные и вторичные электроны сталкиваются с нейтральными атомами ксенона, исходящими из буферной камеры 23 Образованные в результате этих столкновений ионы ксенона ускоряются электростатическим полем Е в ускорительном канале 24 Из-за наличия свободных электронов в ускорительном канале 24 не образуется пространственный заряд Нейтрализация пучка ионов обеспечивается частью электронов, исходящих из полого катода 40 Формирование градиента радиального магнитного поля, обеспечиваемое благодаря специальному расположению катушек 31, 32 и 33, а также полюсных деталей 34 и 35, позволяет разделить функции ускорения ионов и функцию ионизации, осуществляемую в зоне, непосредственно прилегающей к аноду 25 Регулирование этих плазменных ракетных двигателей может осуществляться различными способами В соответствии с первым способом расход ионизируемого движущего газа (в данном случае ксенона) определяется простыми калиброванными отверстиями В этом случае двигатель не имеет никаких средств активного регулирования В соответствии с другим способом ток разряда или поток отбрасываемых ионов регулируется отрицательной обратной связью по расходу ксенона при помощи специального клапана или нагреваемого капилляра Этот второй способ является приблизительным, поскольку здесь регулируется ток разряда или поток отбрасываемых ионов данного двигателя, но не величина его тяги Таким образом, нет никакой гарантии, что сила тяги будет строго пропорциональна этому регулируемому параметру (между прочим, отмечаются расхождения в пропорциональности, достигающие ±10%) Эти упомянутые выше способы предполагают отсутствие функций измерения и регулирования тяги данного двигателя, что приводит к следующим недостаткам - в наземных условиях в процессе приемных испытаний двигателя приходится измерять величину тяги с помощью специальных весов, что представляет собой достаточно стеснительное обстоятельство, - в полете, когда два плазменных двигателя функционируют одновременно, например, в широко распространенном устройстве коррекции Север-Юг геостационарных спутников, возможное рассогласование тяги этих двигателей может вызвать возмущение углового положения данного спутника, которое необходимо затем исправлять другими двигателями, тогда как устройство измерения и регулирования тяги позволило бы исключить это относительное возмущение, - в полете незнание величины импульса коррекции заставляет осуществлять регулярное слежение за траекторией полета спутника Предлагаемое изобретение имеет целью обеспечить возможность достаточно простого и эффективного измерения вариаций тяги плазменного двигателя с замкнутым дрейфом электронов Данное изобретение имеет целью также обеспечить возможность достаточно простого определения величины тяги плазменного двигателя на основе измерений вариаций тяги Ещеодна цель данного изобретения состоит в обеспечении активного регулирования тяги плазменного двигателя на основе измерения вариаций тяги этого двигателя Упомянутые выше цели достигаются благодаря устройству измерения вариаций тяги плазменного ракетного двигателя с замкнутым дрей 41889 фом электронов, содержащего главный кольцевой канал ионизации и ускорения, по меньшей мере один полый катод, располагающийся за пределами упомянутого выше главного канала со стороны его выходной части, анод, средства подачи ионизируемого газа, связанные соответственно с полым катодом и с анодом устройства, а также средства создания магнитного поля В соответствии с предлагаемым изобретением это устройство содержит множество датчиков магнитного потока, располагающихся вокруг ускорительного канала, множество усилителей, на входы которых подаются соответствующие сигналы от этих датчиков магнитного потока, и суммирующий контур, входы которого соединены с выходами упомянутых выше усилителей Предлагаемое устройство измерения содержит кроме того множество контуров уравновешивания, включенных между выходами упомянутых выше усилителей и суммирующим контуром, причем каждый контур уравновешивания осуществляет уравновешивание сигнала, выдаваемого соответствующим усилителем, при помощи коэффициента, определяемого калибровкой В этом случае устройство калибровки может содержать виток, способный занимать несколько различных осевых положений в ускорительном канале для определения коэффициентов уравновешивания соответствующих контуров уравновешивания С целью получения непосредственного рельефа тяги предлагаемое устройство может кроме того содержать контура интеграторов, связанные с упомянутыми выше усилителями или один контур интегратора, подключенный к выходу суммирующего контура В соответствии с особым способом практической реализации предлагаемого изобретения данное устройство содержит, кроме того, несколько аналого-цифровых преобразователей, располагающихся соответственно на выходе упомянутых выше усилителей, и один мультиплексор, к входам которого подключены сигналы, поступающие с аналого-цифровых преобразователей, и выходы которого соединены с входом суммирующего контура для формирования в конечном счете выходного сигнала в цифровой форме В предпочтительном варианте практической реализации предлагаемого изобретения датчики магнитного потока представляют собой катушки, располагающиеся вокруг упомянутого выше ускорительного канала данного двигателя В этом случае предлагаемое устройство содержит, в предпочтительном варианте, несколько таких катушек, служащих в качестве датчиков магнитного потока и располагающихся коаксиальным образом по отношению к ускорительному каналу данного плазменного двигателя в различных плоскостях поперечного радиального сечения данного ускорительного канала В соответствии со специальным способом практической реализации предлагаемого изобретения по меньшей мере некоторые датчики магнитного потока образованы катушками, записываемыми постоянным током и представляющими собой часть упомянутых выше средств создания магнитного поля во внутренней полости данного плазменного двигателя, и эти датчики магнитного потока, образованные катушками, запитываемыми постоянным током, соединены с упомянутыми выше усилителями посредством специального фильтра, устраняющего постоянную составляющую тока катушек В соответствии с одним из возможных практических применений предлагаемого изобретения сигналы с выхода суммирующего контура подаются в контур отрицательной обратной связи цепи управления регулировочным клапаном упомянутых выше средств подачи поддающегося ионизации газа таким образом, чтобы поддерживать на некотором постоянном уровне величину тяги данного ракетного плазменного двигателя с замкнутым дрейфом электронов В этом случае упомянутый выше контур отрицательной обратной связи может быть выполнен в цифровом виде и заданная величина тяги хранится в запоминающем устройстве Однако, упомянутый выше контур отрицательной обратной связи может быть и аналогичного типа При этом заданная величина тяги данного ракетного двигателя выдается с выхода массового расходомера, связанного со средствами подачи в данный плазменный двигатель поддающегося ионизации газа Все другие существенные характеристики и не упомянутые выше преимущества предлагаемого изобретения необходимым образом следуют из приведенного ниже описания возможных способов его практической реализации, приведенного здесь исключительно в качестве не являющегося ограничительным примера со ссылками не приведенные в приложении рисунки, среди которых - Фиг1, на которой представлен схематически вид в осевом разрезе одного из возможных примеров практической реализации плазменного ракетного двигателя с замкнутым дрейфом электронов, в котором может быть применено устройство в соответствии с предлагаемым изобретением, - Фиг 2, на которой представлен схематический вид в осевом разрезе плазменного ракетного двигателя в соответствии с фиг 1, показывающей часть устройства измерения вариаций тяги в соответствии с предлагаемым изобретением, - Фиг 3A-3D, на которых представлены временные диаграммы, показывающие практический пример реального изменения тяги плазменного двигателя с замкнутым дрейфом электронов и соответствующие изменения других величин, связанных с тягой, - Фиг 4, на которой схематически показаны основные элементы измерительного устройства вариаций тяги плазменного ракетного двигателя с замкнутым дрейфом электронов в соответствии с предлагаемым изобретением, - Фиг 5, на которой схематически представлен частичный вид одного из возможных вариантов практической реализации устройства измерения вариаций тяги плазменного двигателя в соответствии с предлагаемым изобретением, использующего, в частности, комбинированные усилители-интеграторы, - Фиг 6, на которой представлен схематический частичный вид одного из возможных способов практической реализации устройства измере 41889 ния вариации тяги плазменного ракетного двигателя в соответствии с предлагаемым изобретением, в котором катушки создания магнитного поля, образующие часть данного плазменного ракетного двигателя, в то же время выполняют функцию датчиков магнитного потока в устройстве в соответствии с предлагаемым изобретением, - Фиг 7, на которой представлен схематический вид устройства в соответствии с предлагаемым изобретением, в котором добавлен элемент калибровки сигналов, выдаваемых датчиками величины магнитного потока данного устройства, - Фиг 8,на которой представлена блок-схема, показывающая применение данного устройства в соответствии с предлагаемым изобретением в контуре цифрового регулирования тяги данного плазменного ракетного двигателя, - Фиг 9, на которой представлена блок-схема, показывающая применение устройства в соответствии с предлагаемым изобретением в аналоговом контуре регулирования тяги плазменного двигателя На фиг 2 схематически показана часть одного из возможных вариантов практической реализации плазменного ракетного двигателя с замкнутым дрейфом электронов, в принципиальном плане представленного схематически на фиг 1 На этой фиг 2 стрелками, символизирующими ионный ток h и электронный ток le на выходе ускорительного канала 24 плазменного двигателя, показано направление этих токов, а стрелка F показывает направление тяги данного двигателя Кроме того, стрелка 11 символизирует азимутальный ток электронов Jpe, имеющий место в ускорительном канале 24 Теоретическим образом усилиями А Морозова, Зубкова и Демьяникова было установлено, что упомянутый выше азимутальный электронный ток Jpe пропорционален тяге F в плазменных ракетных двигателях с замкнутым дрейфом электронов В результате теоретических исследований упомянутых авторов была получена следующая формула F = ajjpe HzdV, или F = aJpeJ(jpe/Jpe)HzdV, где а представляет собой коэффициент пропорциональности, V представляет собой точное напряжение ускорения, Hz представляет собой параметр магнитного поля в ускорительном канале данного плазменного двигателя, Jpe представляет собой азимутальный электронный ток в ускорительном канале, jpe представляет собой плотность упомянутого выше азимутального тока Этот азимутальный электронный ток Jpe практически недоступен для непосредственного измерения Зато вариации или изменения этого азимутального электронного тока Jpe вызывают изменения магнитного потока в пространстве, располагающемся вокруг ускорительного канала данного плазменного двигателя Именно поэтому устройство 100 измерения вариаций тяги в соответст вии с предлагаемым изобретением содержит датчики магнитного потока 101, 102, 103 и 104, располагающиеся вокруг ускорительного канала 24 В качестве примера можно сказать, что эти датчики величины магнитного потока 101, 102, 103 и 104 могут представлять собой катушки, соосные с упомянутым выше ускорительным каналом 24 Можно использовать, например, две пары катушек 101, 104 и 102, 103, одна из которых (пара катушек 101 и 104) располагается в непосредственной близости от выходного сечения 225 ускорительного канала 24, а другая пара катушек (102, 103) располагается в непосредственной близости от анода 25 в той части ускорительного канала 24, которая наиболее близка к буферной камере 23 Другие пары подобных катушек также могут быть расположены в промежуточных сечениях по отношению к тем сечениям, в которых располагаются пары катушек 101, 104 и 102, 103 Каждая пара этих катушек 101, 104 и 102, 103 содержит одну катушку 101 или 102, располагающуюся в наружной периферической части по отношению к кольцевому ускорительному каналу 24, и одну катушку 103, 104, располагающуюся в центральной внутренней части по отношению к этому ускорительному каналу 24 На фиг 2 представлены также магнитные силовые линии Вр, связанные с азимутальным электронным током Jpe Изменения магнитного потока dO/dt, вызванные изменениями азимутального электронного тока Jpe, выражаются в изменениях интенсивности индуцированного тока в упомянутых выше катушках 101, 102, 103 и 104 Упомянутые выше катушки 101, 102, 103 и 104 соединены с соответствующими входами усилителей 111, 112, 113 и 114, выходы которых соединены посредством контуров уравновешивания 121, 122, 123 и 124 с входами суммирующего контура 115 (см фиг 4) Каждый контур уравновешивания 121, 122, 123 и 124 осуществляет уравновешивание сигнала, выдаваемого усилителем 111, 112, 113 и 114, при помощи соответствующего коэффициента, определяемого при помощи калибровки Для числа п катушек или других датчиков величины магнитного потока 101, 102, 103 и 104 способ калибровки может состоять в использовании витка 170, помещенного в некоторое первое положение по оси z ускорительного канала 24 коаксиально к этому каналу Через этот виток 170 пропускается ток калибровки Ipe, имитирующий азимутальный электронный ток Jpe При этом производится измерение выходных сигналов на всех п катушка 101, 102, 103, 104 Затем эта операция повторяется для другого положения витка 170 по отношению к оси z ускорительного канала 24 Такая операция должна быть выполнена к раз для к различных положений витка 170 относительно оси z ускорительного канала, причем число к должно быть больше или равно числу п катушек 101, 102, 103, 104 На фиг 7 пунктиром показано первое положение 171 и к-тое положение 172 упомянутого выше витка 170 В результате выполненных таким образом изменений можно получить матрицу калибровки с размерами п - к, дающую соответствие между выходными сигналами S1, S2, Sn датчиков 101, 102, 41889 103, 104 и силой тока калибровки I d , Ic2, Icn в виде SI Id c11 c12 dk S2 c21 c22 c2k Ic2 (k>n) Sn cn1 cn2 cnk Icn Эта матрица позволяет установить коэффициенты чувствительности по сигналу Si для каждой катушки 101, 102, 103, 104 в контурах уравновешивания 121, 122, 123, 124 после усиления, но перед подачей сигналов в контур сумматора 115 В соответствии с одним из возможных способов практической реализации предлагаемого изобретения, представленным на фиг 5, датчики изменения магнитного потока, например, катушка 101, соединены с усилителями-интеграторами 150 В этом случае интегрированный сигнал, поступающий с этого усилителя-интегратора, пропорционален силе индуцированного тока, то есть пропорционален локальному изменению магнитного потока Закон, связывающий интегрированный сигнал каждой катушки, например, катушки 101, с интегралом интенсивности азимутального электронного тока в ускорительном канале, то есть с величиной тяги данного двигателя, может быть выведен при помощи описанного выше метода калибровки Выходной сигнал суммирующего контура 115, показанного на фиг 4, характеризует, таким образом, тягу F данного двигателя в соответствии с формулой п F = а ^~* mj • si, i=i где а - коэффициент пропорциональности, mj - коэффициент уравновешивания, учитывающий магнитное поле Hz в точке j ускорительного канала si - выходной сигнал датчика і Упомянутый выше усилитель-интегратор 150 может быть выполнен достаточно простым образом На фиг 5 представлен усилитель-интегратор 150, построенный на основе усилителя 111, связанного с катушкой 101 Резисторы 151 и 152 включены между каждым из входов усилителя 111, связанных с концами катушки 101, и массой Конденсатор 153 включен между выходом усилителя 111 и одним из его входов Нажимной контакт 154 приведения схемы в исходное состояние установлен параллельно конденсатору 153 Само собой разумеется, что в случае установки данного плазменного двигателя на спутнике показанная на фиг 5 кнопка обнуления должна быть заменена на реле или транзистор, управляемые бортовой логической схемой Функция интегрирования, предназначенная для обеспечения возможности воссоздания выходного сигнала, пропорционального самой тяге, а не ее изменениям, может быть реализована также на выходе суммирующего контура 115, например, в цифровой форме, как это будет описано ниже со ссылками на фиг 8 А теперь со ссылками на фиг 6 будет описан специальный способ практической реализации предлагаемого изобретения, дающий возможность получить устройство, применимое к плазменному двигателю с замкнутым дрейфом электронов, описанному в заявке на французский патент № 9208744, поданной 15 июля 1992 г В этом специальном случае катушки 31, 32, 33 (см фиг 1), обеспечивающие создание магнитного поля, могут сами служить датчиками, когда они запитаны постоянным током от контура 161 питания, обеспечивающего постоянную силу тока (см фиг 6) Однако, в этом случае с катушкой, например, с катушкой 31, которая должна одновременно служить и средством создания магнитного поля в ускорительном канале 24 и датчиком магнитного потока, должен быть связан специальный контур адаптации или согласования 160 Этот контур адаптации 160 содержит главным образом фильтр 163, состоящий из конденсатора связи между концом катушки 31 и ходом усилителя 111, для того, чтобы исключить постоянную составляющую на входе усилителя 111 Резистор 162 включен между контуром питания с постоянной силой тока 161 и одним из концов катушки 31 для того, чтобы контролировать силу постоянного тока, подаваемого в катушку 31 На фиг ЗА в качестве примера показана диаграмма изменений тяги F плазменного двигателя с замкнутым дрейфом электронов в функции времени Здесь кривая 201 представляет восходящий фронт 211, треугольное по форме возмущение 212, возмущение синусоидальной формы 213, располагающиеся на участке кривой 201 в виде плато, и нисходящий фронт 214 На диаграмме фиг ЗВ показана форма кривой 205, соответствующей изменению интенсивности азимутального электронного тока Jpe для картины изменений тяги F, представленной на фиг ЗА Здесь следует отметить соответствие формы зон 251, 252, 253, 254 кривой 205 аналогичным зонам 211, 212, 213, 214 на кривой 201, характеризующей тягу двигателя Диаграмма на фиг ЗС показывает форму кривой 203, характеризующей сигналы si, выдаваемые датчиками 101, 102, 103, 104 изменений магнитного потока в соответствии с изменениями тяги данного двигателя F, представленной на фиг ЗА Отметим здесь, что участки 231, 232, 233, 234 кривой 203 хорошо согласуются с производной кривой 201, показанной на фиг ЗА, и позволяют выявить зоны изменения 211, 212, 213, 214 амплитуды кривой 201, характеризующей величину тяги данного двигателя Диаграмма на фиг ЗД показывает воссоздание кривой 204 путем интегрирования сигнала, представленного кривой 203 на фиг ЗС Видно, что воссозданная таким образом кривая хорошо согласуется с кривой 201, показанной на фиг ЗА и характеризующей фактическое изменение тяги двигателя Сигналы, получаемые от катушек 101, 102, 103, 104 устройства детектирования магнитного потока в ускорительном канале данного двигателя, могут быть использованы несколькими отличающимися друг от друга способами В соответствии с первым возможным вариантом применения эти сигналы используются после интегрирования с тем, чтобы обеспечить 41889 получение в конечном счете сигнала, однозначно характеризующего тягу данного двигателя, и корректировать с его помощью эту тягу в случае необходимости в контуре регулирования путем воздействия на величину расхода ионизируемого газа, используемого в качестве рабочего тела в данном двигателе Это тип применения получаемых сигналов особенно полезен в процессе запуска плазменного ракетного двигателя описанного выше типа Интегрирующий контур устройства в соответствии с предлагаемым изобретением может быть аналогового типа и может быть скомбинирован с усилительными контурами 111, 112, 113, 114 так, как было описано выше со ссылками на фиг 5 Интегрирующий контур может также быть помещен на выходе суммирующего контура 115 и может быть выполнен отдельно от усилителей 111, 112, 113, 114 Однако, иногда интегрирующий контур аналогового типа может быть подвержен дрейфу Поэтому в некоторых случаях может оказаться предпочтительным вариант использования интегрирующего контура цифрового типа, как это будет описано ниже со ссылками на фиг 7 На фиг 7 представлена схема одного из возможных вариантов практической реализации цифрового контура регулирования, в котором катушки, как, например, катушка 101, соединены посредством низкочастотных фильтров 181а, 181 п с входами усилителей 182а, 182п, выходы которых в свою очередь подключены к входам аналого-цифровых преобразователей 183а, 183п Выходы этих аналого-цифровых преобразователей 183а, 183п связаны с устройством уплотнения линий связи или мультиплексором 184, управляемым тактовым генератором 185 Выход мультиплексора 184 подключен к суммирующему контуру 186, который выдает сигнал в цифровой форме, определенным образом характеризующий изменения тяги данного двигателя, на вход компаратора 190 Цифровой интегрирующий контур 188 подключен к выходу суммирующего контура 187 для обеспечения возможности выдачи в компаратор 190 профиля тяги F Интегрирующий контур 188, в котором предусмотрен специальный вход установки на ноль, обеспечивает запоминание интегрированной величины Контур 189, в то же время, выдает в компаратор 190 заданное значение тяги Сигнал на выходе компаратора 190 используется для управления регулировочным клапаном 191, установленным в контуре подачи в данный плазменный двигатель ионизируемого газа, представляющего собой рабочее тело На фиг 9 схематически показан другой пример практического применения устройства детектирования в соответствии с предлагаемым изобретением В этом случае непосредственно используются сигналы, выдаваемые упомянутыми выше катушками, например, катушками 101, 102, 103, 104, после их усиления и суммирования, но без выполнения интегрирования Таким образом, сигналы, представляющие собой производную тяги и показанные на фиг ЗС, применяются для формирования цепи отрицательной обратной свя зи, предназначенной для регулирования величины расхода подаваемого в данный двигатель ионизируемого газа и обеспечения за счет этого поддержания величины тяги на постоянном уровне Таким образом, на схеме фиг 9 можно видеть датчики (представлены катушкой 101, которые через низкочастотные фильтры 181а, 181 п подключены к входам усилителей 182, 182п Выходы этих усилителей соединены через контура согласования уровня 193а, 193п, которые могут соответствовать контурам 121, 122, 123, 124 на фиг 4, с суммирующими контурами 194, 195 Выход суммирующих контуров соединен с компаратором 196, на который подается также опорный сигнал, выдаваемый массовым расходомером 197, установленным в магистрали питания данного плазменного двигателя ионизируемым газом, представляющим собой рабочее тело Сигнал с выхода упомянутого выше компаратора 196 используется для управления регулировочным клапаном 191, также установленным в магистрали питания данного двигателя ионизируемым газом Устройство для измерения производной от величины тяги данного плазменного двигателя с замкнутым дрейфом электронов в соответствии с предлагаемым изобретением, а также косвенного измерения путем интегрирования собственно величины самой тяги, представляет следующие преимущества - в наземных условиях при выполнении приемочных испытаний электрическое измерение тяги при помощи данного устройства оказывается более простым, чем измерения с использованием механических весов для измерения тяги, - предлагаемое устройство позволяет упростить орбитальное управление геостационарным спутником Действительно, благодаря этому устройству появляется возможность выдавать строго калиброванные корректирующие импульсы, зная время функционирования двигателя и развиваемую им тягу, таким образом, чтобы сократить частоту выполнения операций контроля параметров орбиты данного спутника, - предлагаемое устройство позволяет способствовать уравновешиванию углового положения спутника, выравнивая величины тяги двух двигателей, работающих в одном направлении, - предлагаемое устройство измерения и регулирования тяги позволяет исключить возможный разбаланс тяги двух одновременно работающих двигателей, что позволяет избавиться от создаваемого таким разбалансом возмущения углового положения спутника И наоборот, для собственных нужд данного спутника с использованием предлагаемого устройства можно по желанию создавать необходимый разбалас тяги двух двигателей, вызывающий появление соответствующего крутящего момента с известными характеристиками, - возможность непосредственного регулирования тяги при использовании предлагаемого устройства позволяет осуществлять активное управление величиной аэродинамического сопротивления для спутников, работающих на низких орбитах 41889 Фиг. 1 F Фиг. 2 41889 Фиг. ЗА J, l 2 0 5 253 252 254 Фиг. ЗВ 234 102 103 ~_1IH 114 24 113 I23 Фиг. 4 41889 Фиг. 5 Фиг. 6 11 1 102 101 112 113 л V2 СЛ- 171 170' п -2 114 \ \ .4 Фиг. 7 10 41889 1й1а 182а 183а 189 RAZ 1 { Фиг. 8 181а 182а 193а 194 197 Фиг. 9 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 - 7 2 - 8 9 (03122) 2 - 5 7 - 0 3 11 195
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of changes of thrust of plasma rocket engine with closed electron drift
Автори англійськоюMorozov Aleksei, Buhrova Antonina, Kharchevnikov Vadim, Valentien Dominique
Назва патенту російськоюУстройство для измерения изменений тяги пламенного ракетного двигателя с замкнутым дрейфом электронов
Автори російськоюМорозов Алексей, Бугрова Антонина, Харчевников Вадим, Валентайен Доминик
МПК / Мітки
Мітки: плазмового, електронів, двигуна, змін, тяги, ракетного, дрейфом, замкненим, вимірювання, пристрій
Код посилання
<a href="https://ua.patents.su/11-41889-pristrijj-dlya-vimiryuvannya-zmin-tyagi-plazmovogo-raketnogo-dviguna-iz-zamknenim-drejjfom-elektroniv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання змін тяги плазмового ракетного двигуна із замкненим дрейфом електронів</a>
Плазмовий двигун зменшеної довжини з замкненим дрейфом електронів
Номер патенту: 27921
Опубліковано: 16.10.2000
Автори: Бугрова Антоніна, Валєнтайен Домінік, Морозов Алєксєй
МПК: F03H 1/00
Мітки: довжини, електронів, зменшеної, плазмовий, замкненим, дрейфом, двигун
Текст:
...подачи ионизируемого газа выходят в кольцевую камеру-заглушку выше анода через кольцевой распределитель В случае кольцевой камеры-заглушки с ячейками кольцевой распределитель соединен с горловинами звуковых сопел, выходящими в различные ячейки такой кольцевой камеры-заглушки В соответствии с другим возможным примером осуществления вторые средства подачи ионизируемого газа выходят в кольцевую камерузаглушку выше анода через единственную...
Прискорювач плазми з замкненим дрейфом електронів
Номер патенту: 32449
Опубліковано: 15.12.2000
Автори: Сорокін Ігорь Борісовіч, Гопанчук Владімір Васільєвіч
Мітки: плазми, дрейфом, електронів, замкненим, прискорювач
Текст:
...частично вн утренние поверхности (20) наружной и внутренней боковых стенок (16, 15) разрядной камеры (3). находящиеся в зоне (22) ионизадии, выполнены под углом к продольной оси (А-А) ускорителя, а поверхность (19) анода (18), обращенная к зоне (22) ионизации со стороны вы ходной чласти разрядной камеры (3), имеет вогнутую форму, о хватывающую магнитные силовые поверхности (25) зоны (22) ионизации, при этом края вогнутой поверхности (19)...
Пристрій для реверсування тяги реактивного двигуна
Номер патенту: 23041
Опубліковано: 30.06.1998
Автор: Юрченко Віктор Олександрович
МПК: F02K 1/76
Мітки: пристрій, реактивного, реверсування, двигуна, тяги
Формула / Реферат:
1. Устройство для реверсирования тяги реактивного двигателя, содержащее поворотные створки, непосредственно соединенные с подвижным корпусом устройства, причем каждая створка шарнирно взаимосвязана с неподвижным корпусом устройства посредством двух рычагов, первый из которых шарнирно связан с рабочим органом компенсатора, а второй - со створкой, отличающееся тем, что в пределах действия компенсатора рычаги каждой створки размещены на...
Пристрій для технічного обслуговування газотурбінного двигуна з реверсором тяги у вентиляторному контурі
Номер патенту: 733
Опубліковано: 15.03.2001
Автори: Гура Віктор Олексійович, Єрмолаєв Віктор В'ячеславович, Бугрін Володимир Миколайович
МПК: F02K 1/72, B64D 29/00
Мітки: вентиляторному, тяги, реверсором, обслуговування, газотурбінного, пристрій, контурі, двигуна, технічного
Формула / Реферат:
1. Пристрій для технічного обслуговування газотурбінного двигуна з реверсором тяги у вентиляторному контурі, що містить переміщувані оболонки реверсора і сопла, механізм передавання руху, балки, розміщені уздовж поздовжньої осі двигуні, ти елементи їх кріплення до частин двигуна, який відрізняється тим, що оболонка сопла взаємозв'язана з механізмом передавання руху реверсора тяги через згадані балки, прикріплені одночасно до переміщуваних...
Реверсор тяги турбоактивного двигуна, що має кромку зміни напряму, із кривизною, яка змінюється
Номер патенту: 26446
Опубліковано: 30.08.1999
Автори: Карималі Фелікс, Легра Мішель Жан Люсьен
МПК: F02K 1/70, F02K 1/60, F02K 1/56
Мітки: кривизною, змінюється, кромку, має, тяги, турбоактивного, зміни, реверсор, напряму, яка, двигуна
Формула / Реферат:
1. Реверсор тяги турбореактивного двигателя, имеющий кромку изменения направления с изменяющейся кривизной, содержащий трубу инверсии, образующую канал для реверсированного потока в режиме реверсирования тяги, которая ограничена, по крайней мере, со стороны выше по потоку неподвижной кромкой изменения направления, выполненной заодно с неподвижной конструкцией выше по потоку реверсора, отличающийся тем, что сечения кромки изменения...
Наступний патент: Спосіб одержання похідних 2-перфторалкіл-3-оксазолін-5-ону (варіанти), перфторалканоїламінонітрильні проміжні сполуки
Випадковий патент: Спосіб електрошлакового наплавлення