Коловорот

Формула / Реферат
1. Коловорот, який складається з барабана, троса та привода у вигляді вала або рукоятки, який відрізняється тим, що геометрична вісь барабана віддалена від осі обертання привода на відстань, що перевищує радіус барабана більше, ніж на півтовщини троса, а вісь обертання привода виконана закріпленою.
2. Коловорот за п. 1, який відрізняється тим, що вантаж прикріплений до барабана принаймні двома тросами, розміщеними симетрично відносно вектора ваги вантажу і непаралельними між собою.
Текст
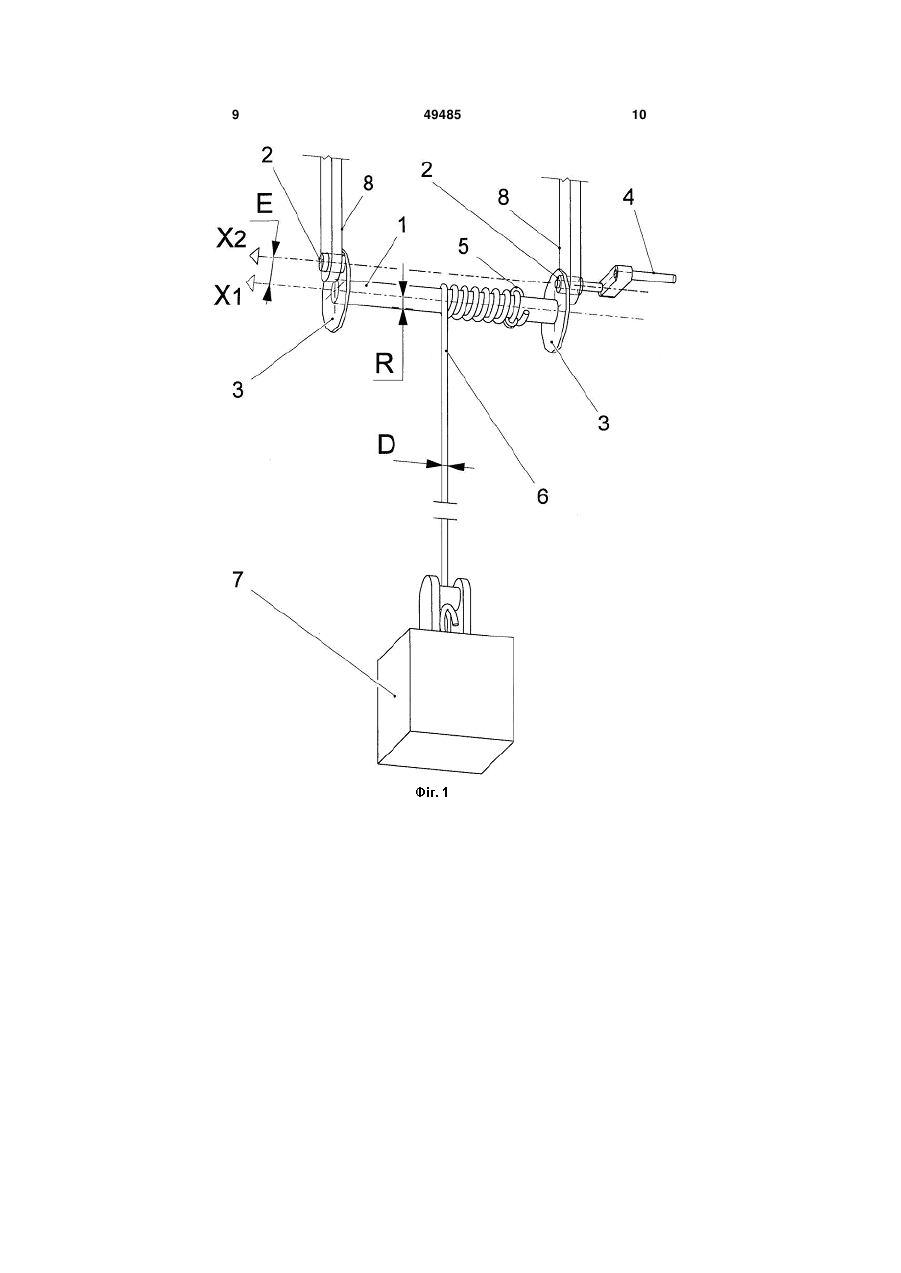
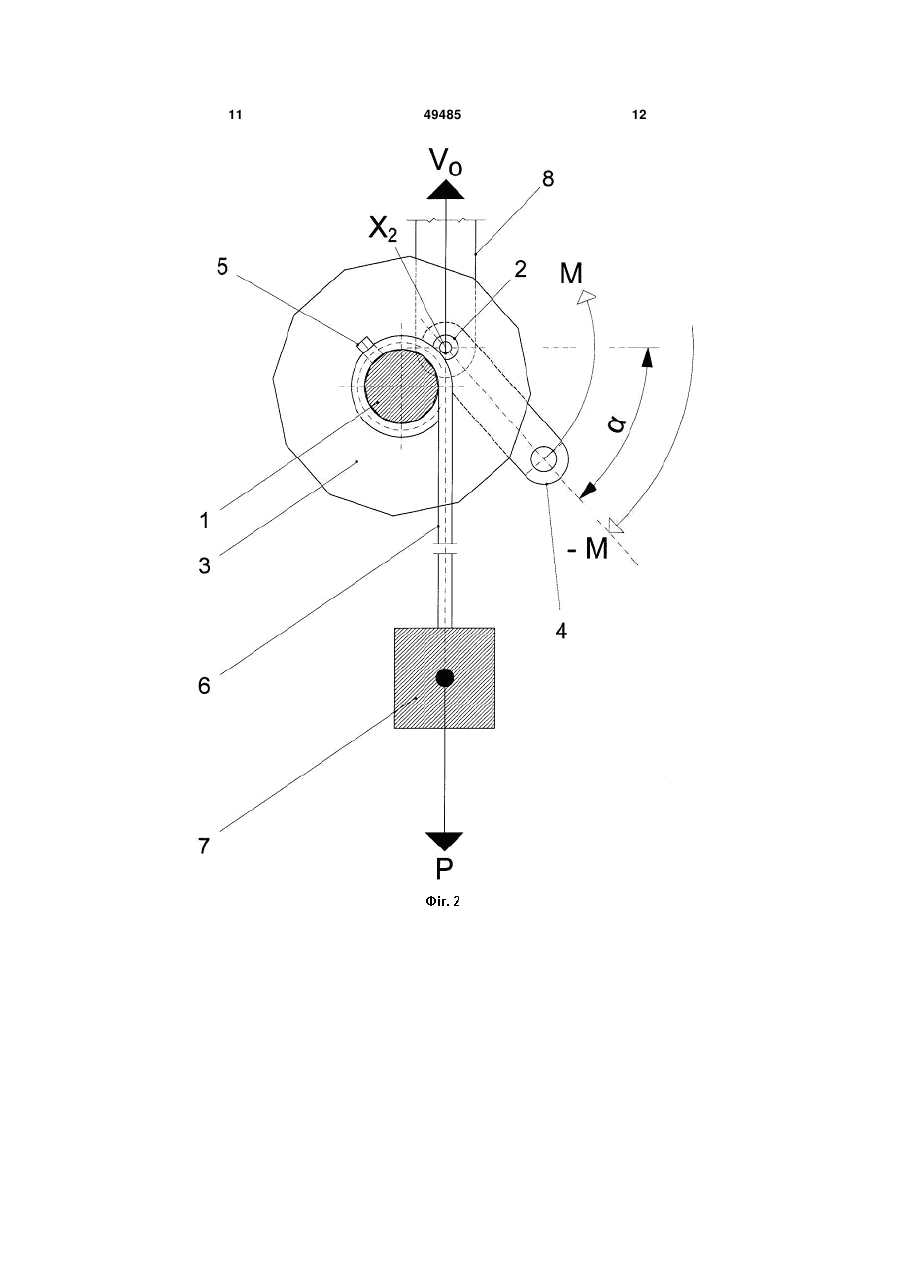
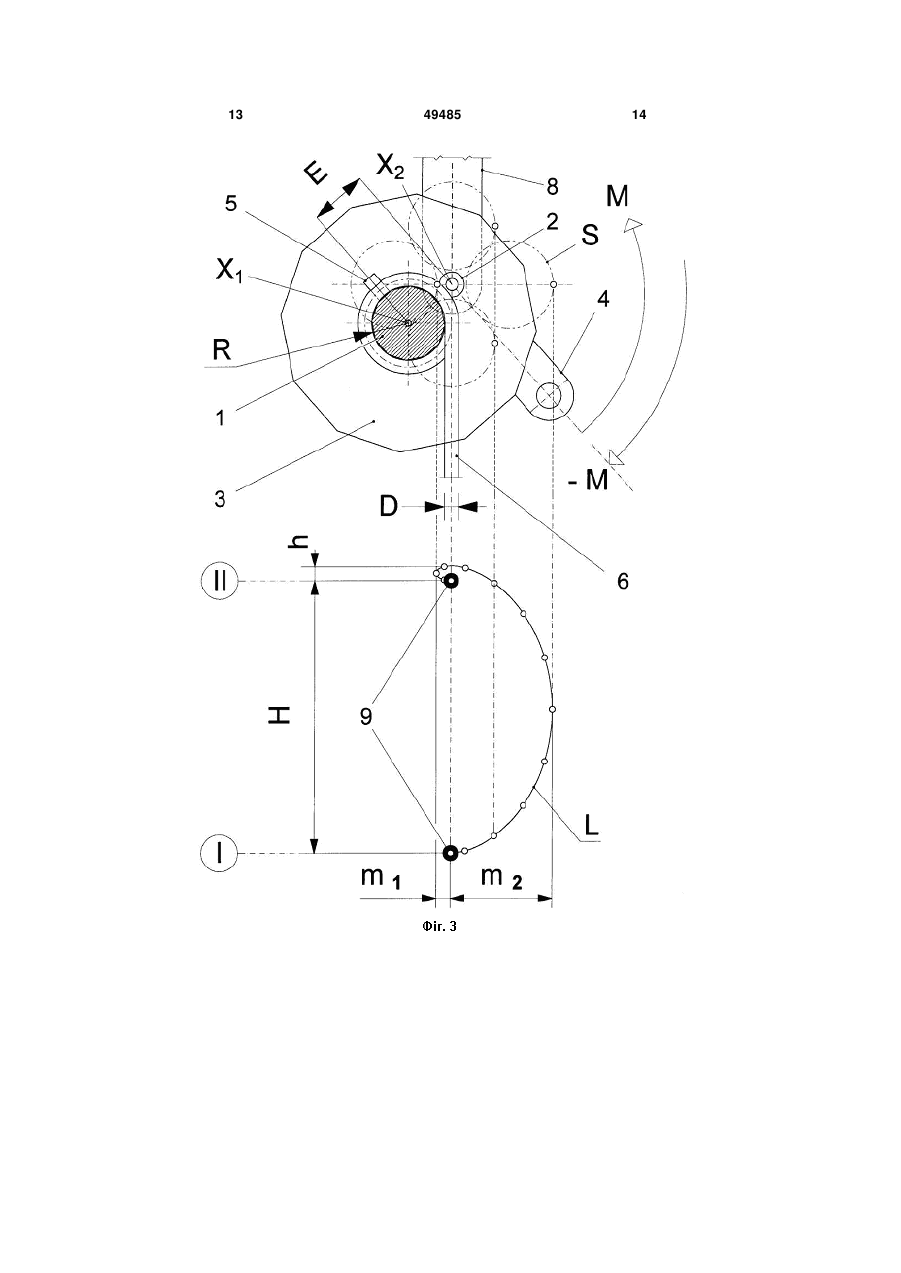
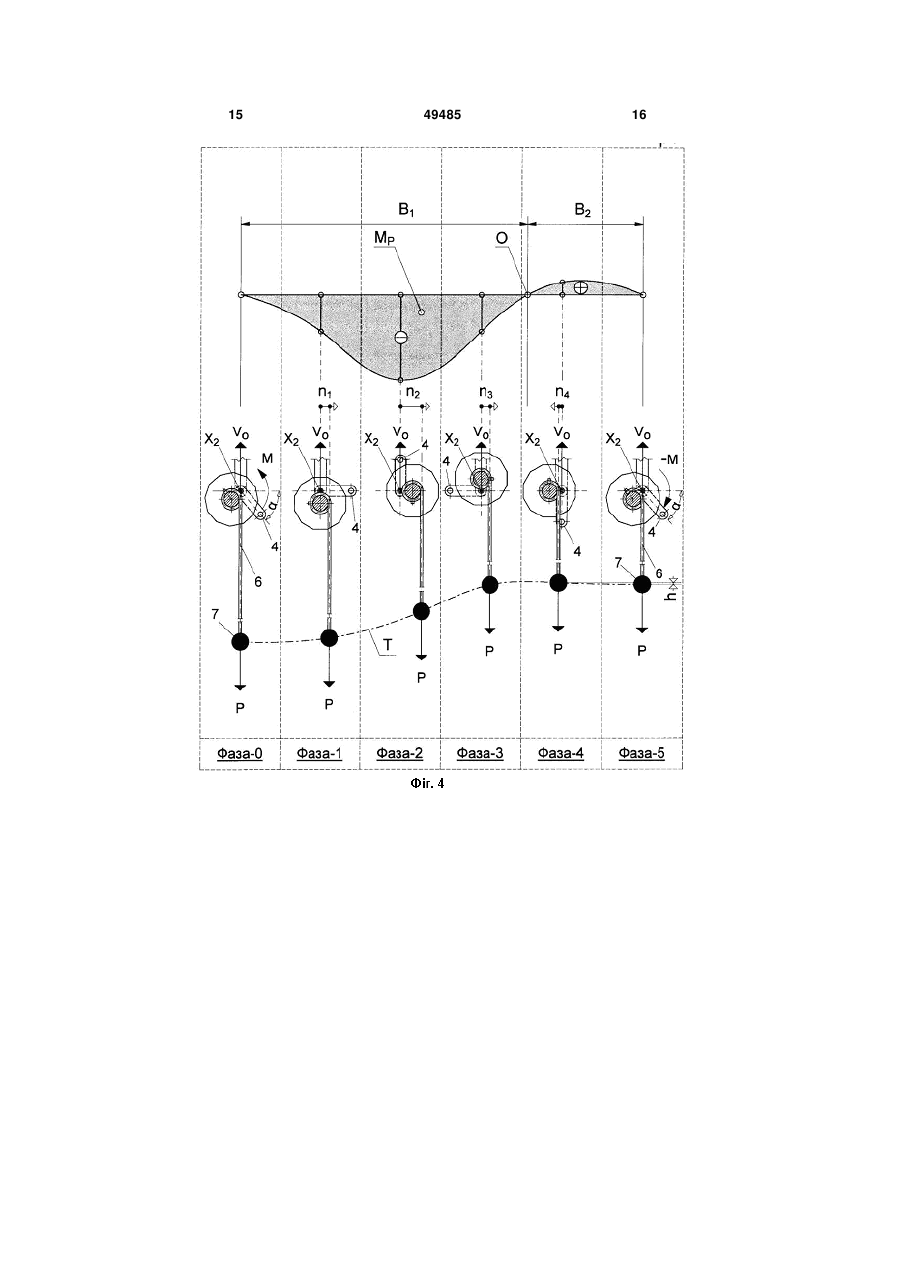
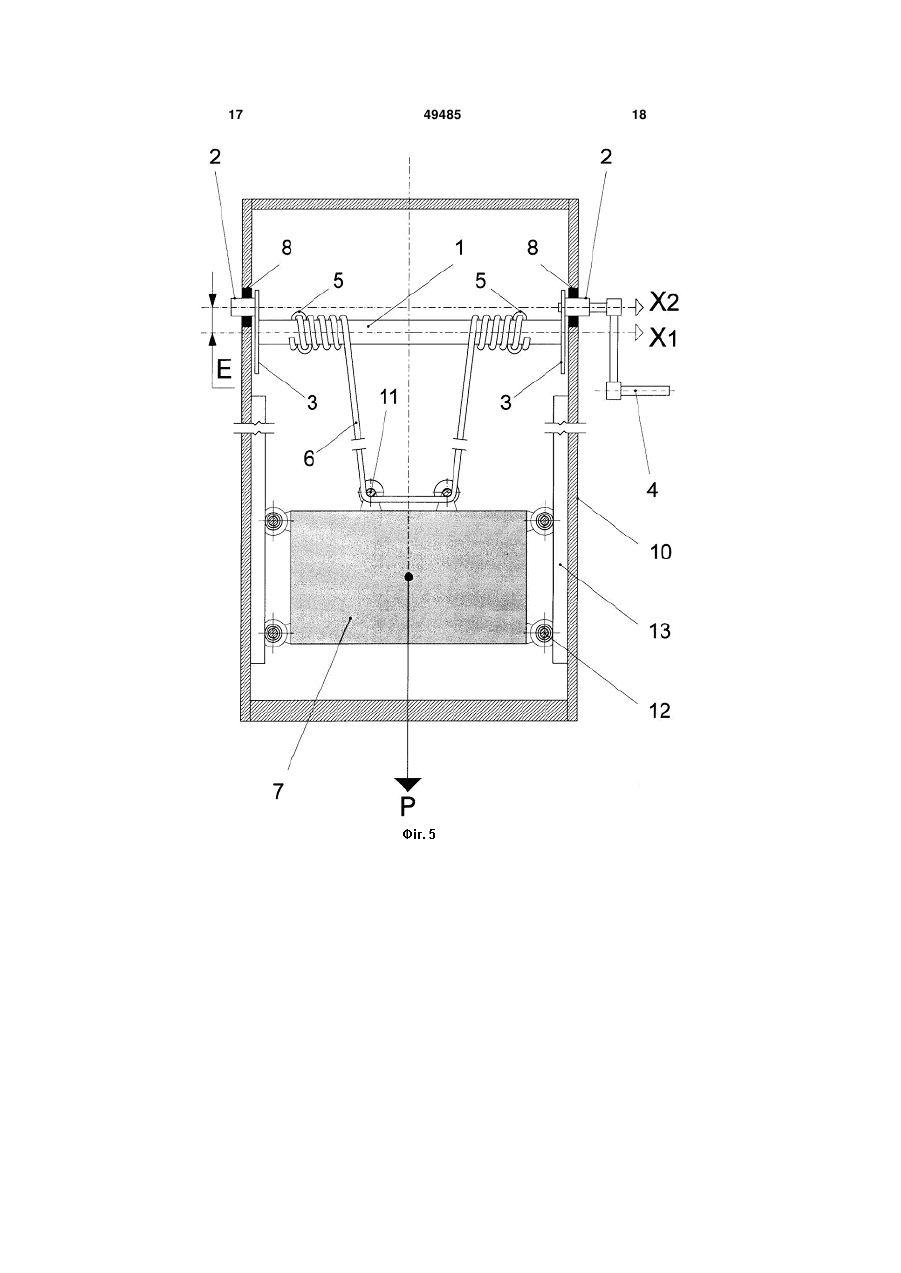
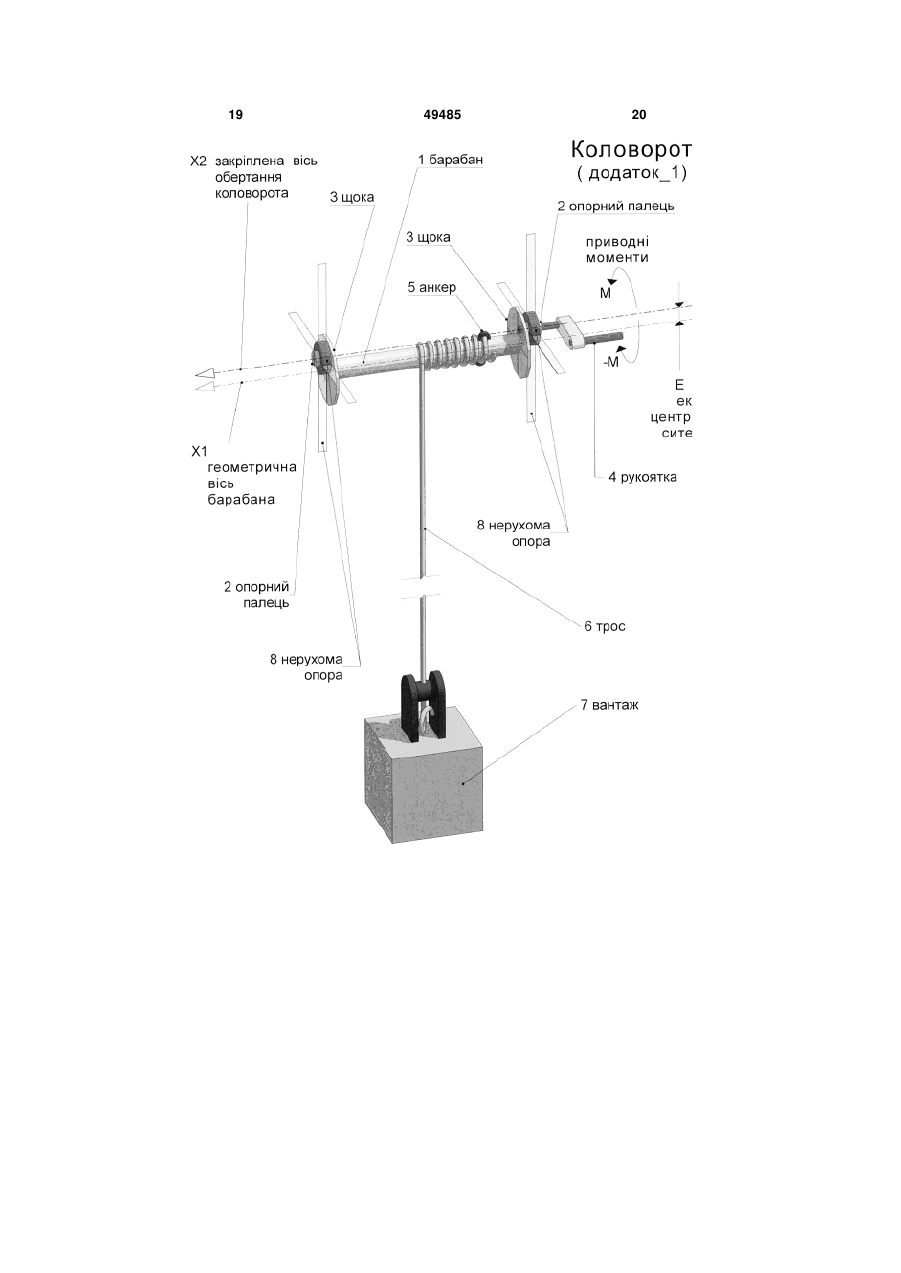
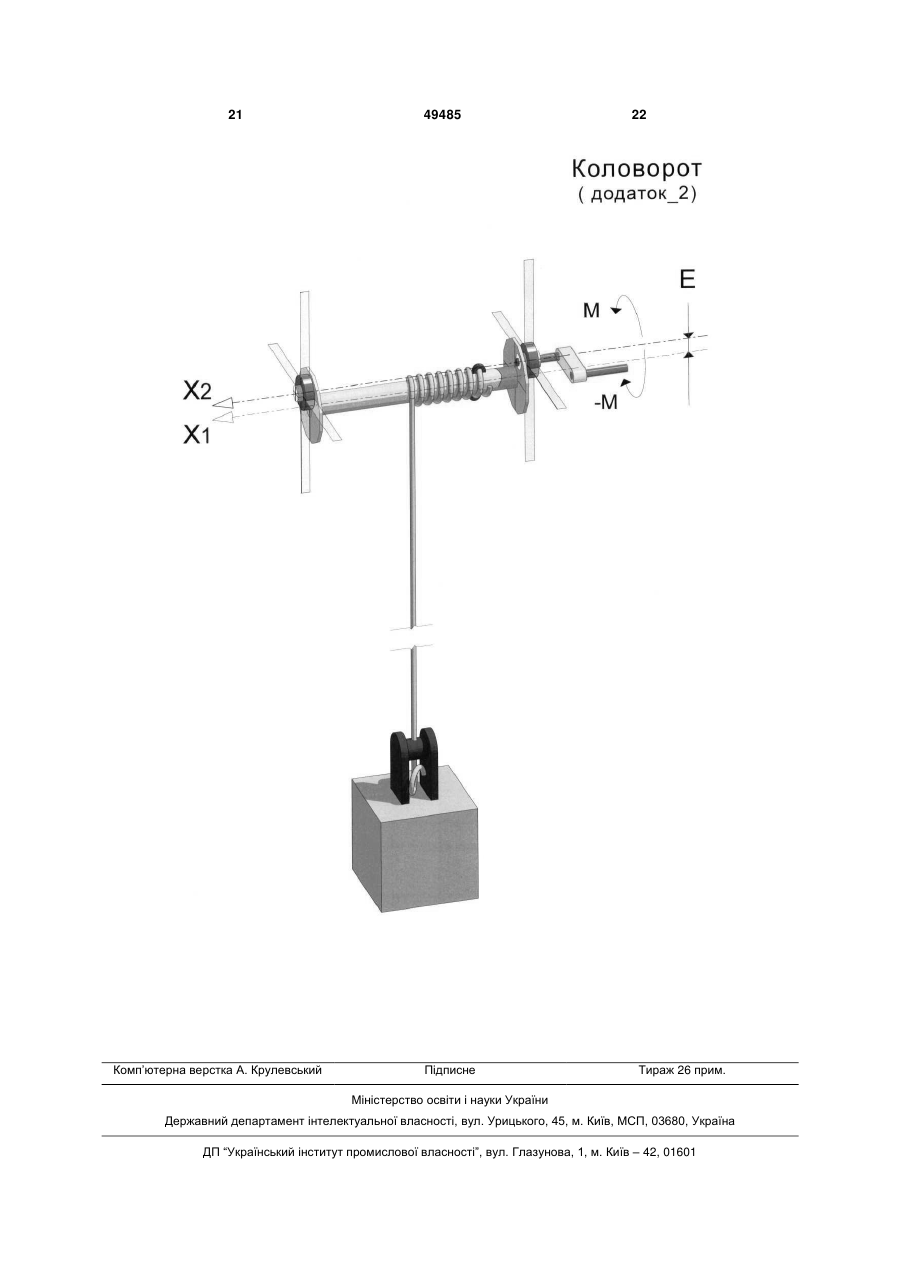
1. Коловорот, який складається з барабана, троса та привода у вигляді вала або рукоятки, який відрізняється тим, що геометрична вісь ба 3 радіус барабана більше, ніж на пів товщини троса, а вісь обертання привода виконана закріпленою. Крім того, вантаж може бути прикріпленим до барабана принаймні двома тросами, розміщеними симетрично відносно вектора ваги вантажу і непаралельними між собою. Суть корисної моделі пояснюється кресленнями, на яких зображено: Фіг. 1 - Коловорот - загальний вигляд. Фіг. 2 - Коловорот у вихідному - фіксованому положенні, (розріз площиною, перпендикулярною осі обертання пристрою). Фіг. 3 - Кінематична схема переміщення вантажного кінця тросу (без вантажу) за один оберт коловорота в межах сусідніх фіксованих положень. Фіг. 4 - Кінематична по фазова схема повного оберту коловорота в межах сусідніх фіксованих положень. Фіг. 5 - Приклад конструктивного вирішення запропонованого коловорота. Додаток - 1, Додаток - 2. Будова коловорота (фіг.1) Коловорот складається з барабана 1, двох опорних пальців 2, жорстко сполучених з барабаном через дві його бокові щоки 3, а один з опорних пальців 2 (на малюнку справа) жорстко сполучений з приводною рукояткою 4. До барабана 1, за допомогою анкера 5, прикріплений трос 6, до вільного кінця якого підвішений вантаж 7. При цьому, геометрична вісь Х1 барабана віддалена від геометричної осі Х2 опорних пальців на відстань Е котра, за величиною, перевищує радіус R барабана більше, ніж на половину товщини D троса 6. При цьому опорні пальці 2 пристрою встановлені, з можливістю обертання, на двох нерухомих опорах 8. Таким чином вісь Х1 - є зовнішньою віссю обертання барабана 1. Робота коловорота (фіг.2) Коловорот працює наступним чином. У вихідному положенні коловорот перебуває у стані стійкої рівноваги під дією сили Р ваги вантажу 7, котра через трос 6 прикладена до барабана 1, та сумі реакцій VО , обох опор 8 на пальцях 2, оскільки сили Р та VО рівні за величиною, протилежно спрямовані та знаходяться в площині осі Х2 обертання пристрою (має місце випадок рівноваги розтягненої системи). У вихідному положенні рукоятка 4 приєднана до пальця 2 під кутом до горизонту в площині свого обертання (кут призначається з ергономічних міркувань, при конструюванні конкретного зразка пристрою). Для піднімання вантажу 7, до рукоятки 4 докладається привідний момент М (на малюнках проти годинникової стрілки), котрий, через щоки 3, надає барабану 1 обертання навколо опорних пальців 2, від чого трос 6, закріплений на барабані через анкер 5, намотується на барабан і підтягує догори вантаж 7. По завершенню одного повного оберту барабана, останній знову опиняється в описаному вище положенні стійкої рівноваги. При цьому рукоятка 4 може бути відпущеною, тоді вантаж 7 залишиться на новому рівні, котрий 49485 4 віддалений від попереднього на довжину одного витка троса. З кожним повним обертом барабана, вантаж проходить через наступне положення само фіксації, в кожному з яких він може бути зупиненим при відпущеній рукоятці. Для опускання вантажу 7, із будь якого фіксованого положення, до рукоятки 4 докладається привідний момент - М (за годинниковою стрілкою), від чого барабан обертається у зворотному напрямку, а трос розмотується з барабана під дією вантажу. Останній, як і при підніманні, може бути зупиненим в будь якому положенні само фіксації. Таким чином, при переміщеннях вантажу в обох напрямках (спуску чи підйому), точки можливих зупинок та само фіксації вантажу регулярно розміщені вздовж траєкторії його руху і кінематично пов'язані з періодичним здійсненням повного оберту коловоротом. На фіг.3 представлена траєкторія L руху вантажного кінця 9 троса 6 (вантаж умовно не показаний) між будь якими сусідніми фіксованими положеннями І та II, за один повний оберт коловорота. Величини переміщень Н між вказаними положеннями постійні і дорівнюють довжині одного витка троса, за умови одношарового намотування троса на барабан. В основу побудови траєкторії L руху вантажного кінця 9, покладено повний оберт геометричної осі S витка троса навколо осі Х2 обертання системи, з урахуванням намотування троса на барабан (розмотування з барабана). Як видно з траєкторії, при проходженнях шляху між положеннями І та II, вантажний кінець троса неодмінно здійснює додаткові т.з. паразитні переміщення h. Вочевидь, наявність вказаних паразитних переміщень, певною мірою, знижує ККД запропонованого пристрою у порівнянні з прототипом. Як свідчить докладніший аналіз, переміщення h тим більше, чим більша відстань Е - ексцентриситет між віссю барабана Х1 та віссю Х2 обертання коловорота. Проте мінімізація паразитних переміщень вантажу за рахунок зменшення ексцентриситету має свою межу: він не може бути меншим за радіус тросової бухти, що утворюється при пошаровому намотуванні троса на барабан (варіант з пошаровим намотуванням не розглядається). Для випадку одношарового намотування троса на барабан, мінімальна величина ексцентриситету виражається формулою: Е>R+D/2. За межею вказаного діапазону значень Е, наприклад Е R+D/2, пристрій втрачає властивість само фіксацій вантажу і перетворюється на модель прототипу, тобто на класичний коловорот, тому наведений діапазон значень величини ексцентриситету становить суттєву ознаку саме нового пристрою, бо забезпечує йому потрібний технічний результат. Аналіз показує також, що за мінімального ексцентриситету Е, паразитні переміщення h вантажу додаються до його корисних переміщень Н в обсязі приблизно 5% від останніх. Як також видно з траєкторії L, за повний оберт пристрою, вантажний кінець троса відхиляється 5 від свого вихідного положення на деякі величини m1 та m2 , (відповідно вліво та вправо), що може призводити до розгойдування вільно закріпленого вантажу під час його руху. На фіг. 4 зображена кінематична по фазова розгортка повного оберту коловорота між двома сусідніми фіксованими положеннями вантажу. Кожна з 5-ти фаз на малюнку відповідає положенню (кутовій орієнтації) приводної рукоятки 4 коловорота в певному секторі його обертання. У верхній частині малюнка зображена по фазова розгортка епюри вантажних моментів МP моментів сили Р з боку розтягненого троса 6 під дією вантажу 7, відносно осі Х2 обертання коловорота, а також плечі n1, n2, n3, n4, цих моментів у відповідних фазах оберту. Стрілки при зображеннях плечей показують з якого боку вісі Х2 обертання коловорота знаходиться трос у даній фазі. Абсолютні величини вантажних моментів МP на епюрі, практично, дорівнюють абсолютним величинам необхідних приводних моментів М, у відповідних секторах обертання рукоятки. Знаки вантажних моментів на епюрі та приводних моментів на кінематичній розгортці прийняті за їхніми напрямками : + проти годинникової стрілки (в бік намотування троса), – за годинниковою стрілкою (в бік розмотування троса), По фазова розгортка в порядку 0 «-» 5 (зліва направо) відповідає підніманню вантажу приводним моментом М. По фазова розгортка в порядку 5 «-» 0 (справа наліво) відповідає опусканню вантажу приводним моментом -М. Епюра МP , по фазах, виглядає наступним чином: - Фаза-0 Рукоятка 4 пристрою займає вихідне положення під кутом до горизонту. Коловорот перебуває у вихідному фіксованому стані. - Фаза-1 МP=0 ; Рукоятка 4 пристрою повернута приводним моментом М в горизонтальне положення. -МP=Р • n1; Наступні фази: 2, 3, і 4 відповідають положенням коловорота через кожні 90° повороту рукоятки 4 під дією приводного моменту М: - Фаза-2 -МР=Р • n2 ; - Фаза-3 -МP=Р • n3; - Фаза-4 +МР=Р • n4; В останній, 5-тій фазі, коловорот завершує повний оберт і переходить у чергове фіксоване положення, рукоятка 4 знову повернута на кут до горизонту, як у фазі 0. Відповідно, МP=0 ; По фазові співставлення епюри МP з приводними моментами М та -М, відповідно в бік намотування та в бік розмотування троса, показують наступне. При підніманні вантажу, необхідний приводний момент М зростає від нуля, до максимуму на ділянках фаз 0 «-» 2. На ділянці фаз 2 «-» 4 він спадає і досягає ну 49485 6 ля в точці О епюри на початку 4-ї фази. Після проходження вказаної точки, коловорот може самостійно (при відпущеній рукоятці) повернутися у наступне фіксоване положення у фазі 5, під дією ваги вантажу, оскільки напрямки вантажного і приводного моментів, відповідно МP та М співпадають. При цьому, вантаж 7 приспускається на паразитну висоту h. Опускання вантажу, між сусідніми фіксованими положеннями, відбувається в зворотному порядку: від фази 5, до фази 0. При опусканні вантажу, необхідний приводний момент -М зростає від нуля, до максимуму на ділянці фаз 5 «-» 4 та повертається до нуля в кінці 4-ї фази у точці О епюри, після чого, як і в попередньому випадку, може відбуватися самостійний перехід коловороту до фази 0 (у наступне фіксоване положення), під дією ваги вантажу, оскільки напрямки вантажного і приводного моментів, відповідно - МP та -М . Наведений аналіз свідчить про нерівномірність навантажень на приводну рукоятку 4 коловорота з боку вантажу 7, при переміщенні останнього. Крім того, період обертання коловорота між фіксованими положеннями, розбивається нульовою точкою О на дві нерівні ділянки (сектори): В1 та В2, на одній з яких (в залежності від напрямку руху вантажу) діє ефект само повертання відпущеної рукоятки в бік її обертання. По фазова розгортка траєкторії Т руху вантажу, свідчить про нерівномірність вертикального переміщення вантажу за період повного оберту пристрою. Зважаючи на вказані властивості запропонованого коловорота, можна сформулювати деякі конструктивні заходи для задоволення експлуатаційних вимог пристроїв, в яких він може бути застосованим та точніше окреслити області його застосування. 1. Якщо функціонування пристрою вимагає збереження постійної величини переміщень вантажу між його фіксованими положеннями, цього можливо досягти шляхом забезпечення одношарового намотування троса на барабан за рахунок траверзного підвішування вантажу до барабана двома нахиленими гілками тросу, розташованими симетрично відносно вектора сили Р ваги вантажу. 2. Розхитувань вантажу можна уникнути, одним з відомих конструктивних прийомів, наприклад шляхом застосування напрямних елементів для вантажу. На фіг. 5 наведено приклад конструктивного вирішення запропонованого пристрою, котрий задовольняє останні дві вимоги. Коловорот за попереднім описом, опорними пальцями 2 встановлений на нерухомій рамі 10 з можливістю обертання навколо осі Х2 від приводної рукоятки 4. Трос 6 симетрично закріплений обома своїми кінцями до двох анкерів 5 барабану 1 і на утвореній таким чином тросовій петлі, через блочні ролики 11 підвішений вантаж 7. Тросовий контур, разом з барабаном 2, утворюють трапецію, симетрично розміщену відносно вектора сили Р ваги вантажу, що зумовлює одношарове навивання тросу на 7 поверхню барабана, і забезпечує постійну величину переміщень вантажу між його фіксованими положеннями. В свою чергу, вантаж 6 через упорні ролики 12 взаємодіє з напрямними рейками 13 рами 10, що забезпечує вантажеві плоско-паралельні переміщення та унеможливлює його розхитування під час руху. Окрім наведених, можливі і інші конструктивні прийоми надання пристрою потрібних робочих властивостей. Так у випадках, коли вимагається тільки мінімізація відстаней між фіксованими положеннями підйомної частини пристрою, задача може вирішуватися шляхом мінімізації діаметра барабана та діаметра троса (за дотримання мінімальної величина ексцентриситету Е), зокрема з застосуванням тонкого м'якого троса, наприклад з полімеру. При цьому, підвищення жорсткості (зменшення небажаної пружності троса) можливе шляхом збільшення кількості несучих тросових гілок (не показано), і/або виконання тросів із жорстких кордових ниток, котрі застосовуються у виробництві автомобільних шин (вказані нитки практично не розтягуються). Ще одним напрямком мінімізації відстаней між точками само фіксації вантажу може бути застосування, замість тросів, плівкового чи тканого матеріалу (не показано). Усунення явища розхитування вантажу під час руху, переважно для пристроїв з короткими переміщеннями вантажу, можливо також шляхом застосування тросового перепускного кільця на виході троса з барабана (не показано). Нерівномірність навантажень на рукоятку, при 49485 8 її обертанні, може бути ефективно використаною для ергономічного вирішення пристрою. Відомо, що ручне (ножне у велосипеда) обертання як операторська дія пов'язане з неможливістю забезпечення людиною постійного зусилля на рукоятку (педаль) протягом усього кола обертання. Вдало призначений кут вихідного положення рукоятки 4 коловорота (фіг. 2) може забезпечити зручне співвідношення між зусиллями людини та опором рукоятки в різних секторах її обертання. Зважаючи на понижений ККД, та наявність секторів само обертання рукоятки, між точками її само фіксації, можна передбачити переважне застосування запропонованого коловороту в ручних пристроях для переміщень легких вантажів на коротких відстанях. До таких пристроїв можна віднести: колодязні коловороти, гаражні ворота, жалюзійні пристрої, тросові натяжні пристрої, зокрема спортивнотуристичного призначення, наметові накриття, маркізи, тощо. Особливо слід зазначити можливість застосувань запропонованого коловорота, при створенні трансформованих меблів, зокрема це стосується дитячих домашніх та шкільні меблів, в першу чергу, столів, стільців, та класних дощок, котрі становлять основу номенклатури навчального обладнання. Запропоноване технічне рішення, завдяки конструктивно простій і надійній фіксації рухомої частини виробу у проміжних положеннях, може суттєво розширити використання трансформованих дитячих меблів, що є на сьогодні критично важливим для збереження здоров'я дітей. 9 49485 10 11 49485 12 13 49485 14 15 49485 16 17 49485 18 19 49485 20 21 Комп’ютерна верстка А. Крулевський 49485 Підписне 22 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBitbrace
Автори англійськоюYeremenko Oleksandr Fedotovych
Назва патенту російськоюКоловорот
Автори російськоюЕременко Александр Федотович
МПК / Мітки
МПК: B66D 5/00, B66D 1/54, B66D 1/00
Мітки: коловорот
Код посилання
<a href="https://ua.patents.su/11-49485-kolovorot.html" target="_blank" rel="follow" title="База патентів України">Коловорот</a>
Пристрій для переміщення вантажів
Номер патенту: 3604
Опубліковано: 15.12.2004
Автор: Чиннов В'ячеслав Андрійович
МПК: B66D 1/02
Мітки: пристрій, вантажів, переміщення
Формула / Реферат:
Пристрій для переміщення вантажів, що містить редуктор із зубчатою передачею, який взаємодіє з приводом і барабаном-котушкою, що несе трос, який відрізняється тим, що редуктор виконано у вигляді диференційно-гвинтової планетарної передачі, гвинт якої з'єднано з демпфером, наприклад повітряним, який оснащений вентилем, що має можливість змінювати швидкість демпфірування і швидкість троса-вантажу.
Пристрій для переміщення вантажів
Номер патенту: 5315
Опубліковано: 15.03.2005
Автор: Чиннов В'ячеслав Андрійович
МПК: B66B 9/16
Мітки: пристрій, вантажів, переміщення
Формула / Реферат:
Пристрій для переміщення вантажів, що містить корпус, в якому розміщений барабан із котушкою, що несе трос для кріплення вантажу, який відрізняється тим, що барабан взаємодіє з демпфером, що виконаний у вигляді шестеренчастого насоса, вмонтованого в замкнутий контур руху рідини.
Двигун
Номер патенту: 33502
Опубліковано: 25.06.2008
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
1. Двигун, що має колесо, жорстко закріплене на валу, та вантажі, який відрізняється тим, що на колесі жорстко закріплені зубчасті колеса, та має вантаж, на якому жорстко закріплені зубчасті колеса, який постійно зміщений від осі вала колеса в один і той же бік колесом-упором, причому вантаж з колесом жорстко не закріплений, а спирається на колесо своїми зубчастими колесами на зубчасті колеса, що закріплені на колесі.2. Двигун за п. 1,...
Автобалансир-демпфер
Номер патенту: 52321
Опубліковано: 16.12.2002
Автор: Філімоніхін Геннадій Борисович
Мітки: автобалансир-демпфер
Формула / Реферат:
Автобалансир-демпфер, що містить коригувальний вантаж, встановлений з можливістю здійснювати сферичний рух навколо точки на повздовжній осі ротора, який відрізняється тим, що коригувальному вантажу сферичний рух надається сферичним шарніром.
Пристрій для переміщення вантажів
Номер патенту: 10894
Опубліковано: 15.12.2005
Автор: Чиннов В'ячеслав Андрійович
Мітки: вантажів, пристрій, переміщення
Формула / Реферат:
1. Пристрій для переміщення вантажів, що містить корпус, в якому розміщені муфта ковзання для регулювання швидкості руху виконавчого вузла, який відрізняється тим, що виконавчий вузол виконаний у вигляді шківа-зірочки, що несе ланцюг, і корпус, забезпечений камерою (місткістю) для розміщення ланцюга.2. Пристрій за п. 1, який відрізняється тим, що корпус забезпечений пристосуванням для його підвіски (кріплення).
Попередній патент: Спосіб отримання оптичного матеріалу на основі cdsb
Наступний патент: Закупорювальний пристрій
Випадковий патент: Зшиваючі реагенти та їх застосування