Гірокомпас
Номер патенту: 83114
Опубліковано: 10.06.2008
Автори: Машиністов Едуард Сергійович, Бузанов Віктор Іванович, Дмитрієв Олексій Юрійович, Шуть Володимир Петрович, Сосуновський Олександр Сергійович, Сичиков Олександр Олександрович, Голік Марат Миколайович, Копитько Валерій Павлович, Сидоренко Юрій Захарович

Формула / Реферат
1. Гірокомпас, що має поворотний відносно вертикальної осі гіроблок, підвішений усередині гіроблока чутливий елемент з закріпленим на ньому вертикальним дзеркальним відбивачем, закріплений на гіроблоці секторний оптичний перетворювач кута з перемикачем оптичних каналів, з можливістю його оптичного зв'язку з дзеркальним відбивачем чутливого елемента, приводи розвороту гіроблока і чутливого елементу з системами керування, який відрізняється тим, що він додатково містить в собі еталонну прямокутну призму з вертикальними дзеркальними відбивачами, з якою зв'язані секторний перетворювач кута, пристрій ідентифікації відбивача і зовнішній автоколіматор.
2. Гірокомпас за п. 1, який відрізняється тим, що секторний оптичний перетворювач кута зв'язаний з відбивачами еталонної призми оптично за допомогою оптичного перемикача і системи керування, а еталонна призма має додаткові дзеркальні відбивачі, азимутальна орієнтація котрих відрізняється на 180°.
3. Гірокомпас за пп. 1, 2, який відрізняється тим, що додатково еталонна призма має дзеркальні відбивачі, азимутальна орієнтація яких відрізняється на 90° від попередніх.
4. Гірокомпас за пп. 1, 2, який відрізняється тим, що додатково еталонна призма має дзеркальний відбивач, орієнтований під кутом, який дорівнює азимуту напрямку на зовнішній стаціонарний автоколіматор.
5. Гірокомпас за пп. 1, 2, який відрізняється тим, що додатково еталонна призма має азимутальний привод розвороту.
6. Гірокомпас за пп. 1, 2, який відрізняється тим, що додатково введено перемикач оптичних каналів візування зовнішнього автоколіматора з можливістю по черзі формувати канал візування на вихідне дзеркало еталонної призми і на напрямок, азимут якого визначається.
7. Гірокомпас за п. 2, який відрізняється тим, що додатково оптичний перемикач гіроблока має положення, при якому вісь візування автоколіматора гіроблока спрямована на зовнішній відбивач.
Текст
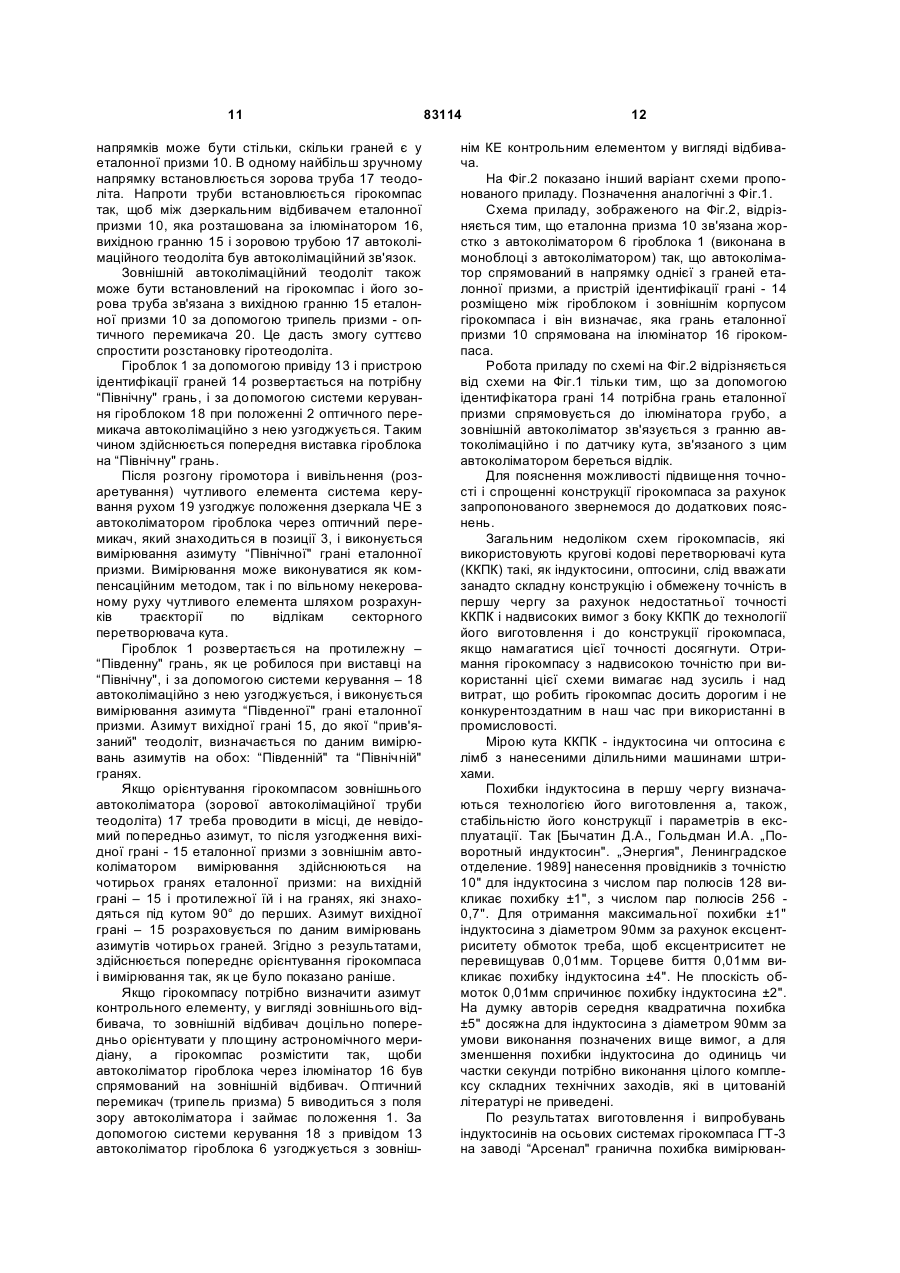
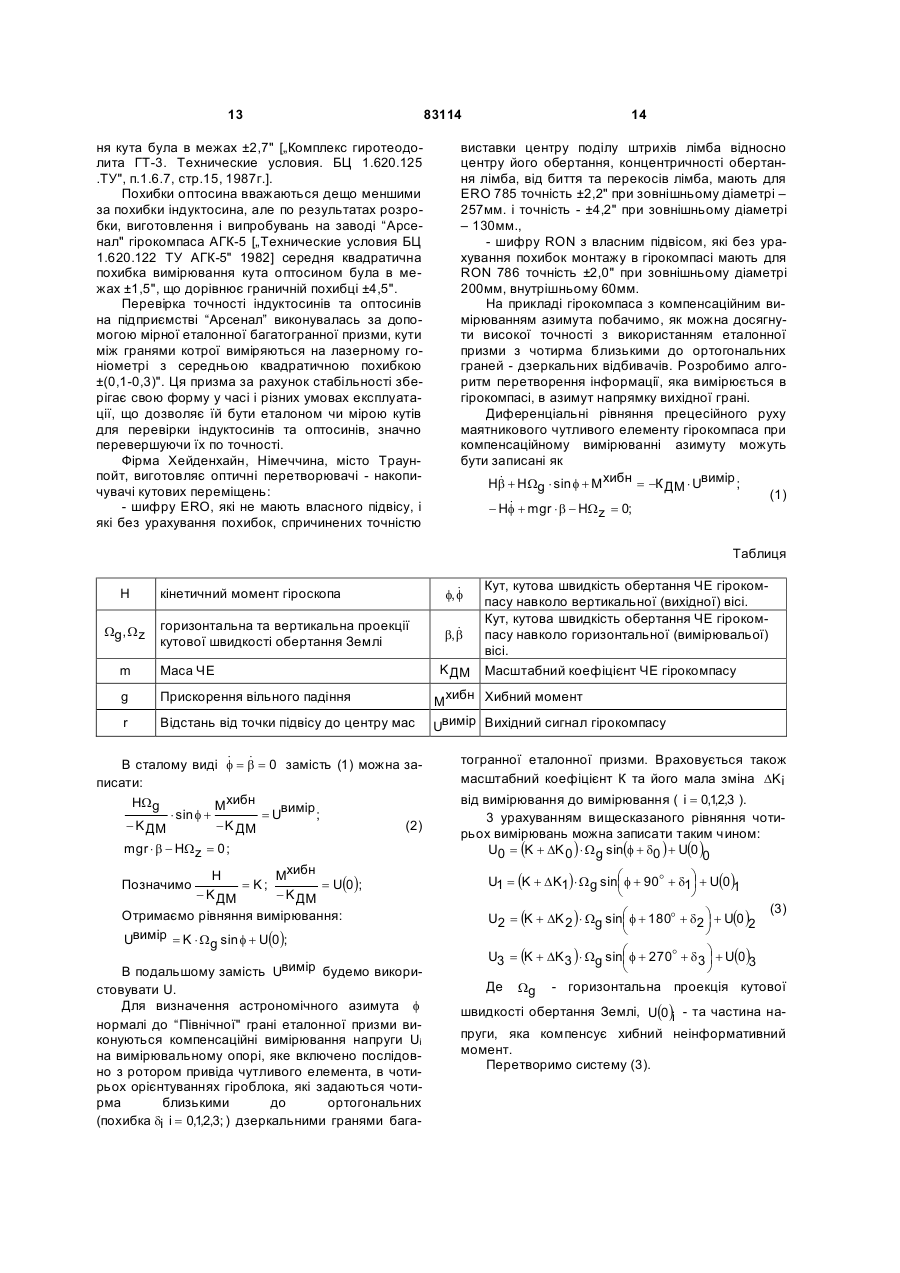
1. Гірокомпас, що має поворотний відносно вертикальної осі гіроблок, підвішений усередині гіроблока чутливий елемент з закріпленим на ньому вертикальним дзеркальним відбивачем, закріплений на гіроблоці секторний оптичний перетворювач кута з перемикачем оптичних каналів, з можливістю його оптичного зв'язку з дзеркальним відбивачем чутливого елемента, приводи розвороту гіроблока і чутливого елементу з системами керування, який відрізняється тим, що він додатково містить в собі еталонну прямокутну призму з вертикальними дзеркальними відбивачами, з якою зв'язані секторний перетворювач кута, пристрій ідентифікації відбивача і зовнішній автоколіматор. C2 2 83114 1 3 гірокомпасом та передачі його на місцеві орієнтири теодолітом. Цьому сприяє також і те, що обсяг геодезичних робіт, виконуваних теодолітом при визначенні напрямків та координат на місцевості, значно перевищує обсяг робіт виконуваних гірокомпасом, який може використовуватися час від часу для “списування" накопичених похибок вимірювань. Дійсно, при розробці державної геодезичної мережі 1-4 класів засобом полігонометрії для значного зменшення похибок, долучають в окремих пунктах теодолітного хода вимірювання астрономічних азимутів напрямків гірокомпасом. ["Справочник геодезиста", "Недра", 1975, Книга 2, с.588 600]. Для цього достатня точність вимірювань астрономічного азимута (середня квадратична похибка) 0,5 " - 1" для державної мережі 1 та 2 класів, 1,5 " - 2" для 3 та 4 класів. Зараз багато фірм вже розробили та масово виготовляють зручні в використанні цифрові автоколімаційні теодоліти високого класу точності, оснащені електронними далекомірами [Internet. Sokkia. Surveing instruments catalog. 2004 - 2005]. Ринок та спеціалізовані підприємства насичені цією продукцією. Здобуто позитивного досвіду розробки засобу визначення астрономічного азимута з розподіленими функціями гірокомпаса та теодоліта. Вже відомий комплекс гіротеодоліта ГТ-3, в який входять автоматичний гірокомпас ГТ-3 і теодоліт Т1А, визначає гірокомпасом ГТ-3 астрономічний азимут власного дзеркального контрольного елемента (КЕ) і передає його на будь які напрямки теодолітом Т1-А [„Гиротеодолит ГТ-3. Техническое описание и инструкция по эксплуатации. БЦ1.620.125.ТО". 1986.], [„Комплекс гиротеодолита ГТ-3. Технические условия. БЦ1.620.125.ТУ" 1987]. Згідно з Технічним описом БЦ1.620.125. ТО (сторінка 44 і далі) гірокомпас ГТ-3 має на зовнішньому корпусі чотири ілюмінатори для прив'язки до КЕ. КЕ - плоско паралельне двостороннє дзеркало (відбивний оптичний елемент), яке розміщається на ілюмінаторі і до якого зовні прив'язується автоколімаційна зорова труба теодоліта, а з середини автоколіматор, розміщений на гіроблоці. Гіроблок обертається відносно зовнішнього корпуса і несе на собі підвішений на магнітному підвісі маятниковий чутливий елемент (ЧЕ) гірокомпаса з гіромотором. За допомогою електронно-оптичної системи стеження за азимутальним рухом ЧЕ гіроблок, який несе на собі лімб кругового кодового перетворювача кута (ККПК) - індуктосина, повторює рух ЧЕ, і це дає можливість брати відліки кутів розвороту ЧЕ і уникнути хибного моменту, відслідковуючи підвіс ЧЕ і провідники струму до гіромотора. Після попереднього орієнтування гіроблока гірокомпаса на Північ і вивільнення ЧЕ за допомогою системи керування рух ЧЕ уповільнюється, і протягом визначеного часу фіксуються по ККПК відліки траєкторії руху ЧЕ, по яким вираховується відлік астрономічного азимута при орієнтації гіроблока на Північ. За допомогою ККПК гіроблок розвертається на 180° (на Південь) і таким чином, як і раніше, фіксуються відліки по індуктосину траєкторії 83114 4 руху ЧЕ, і вираховується відлік астрономічного азимута при орієнтації на Південь. По цім відлікам вираховується відлік азимута по ККПК. За рахунок того, що цей результат вільний від впливу постійного хибного моменту ЧЕ, підвищується точність роботи гірокомпаса. Далі винайдений азимут переноситься до КЕ, для чого береться відлік по ККПК при прив'язці автоколіматора гіроблока до КЕ. За допомогою автоколімаційного теодоліта Т1А винайдений азимут може бути перенесений на будь який напрямок. Ця схема побудови гіротеодоліта дозволяє забезпечити малу похибку визначення азимута напрямку (3"- середня квадратична похибка вимірювання за 35 хвилин часу) також і тому, що під час роботи людина не торкається гірокомпаса і не збурює його (на відміну від гіротеодолітів, де людина вимушена, працюючи з теодолітною частиною гіротеодоліта, збурювати і гірокомпас). Ця схема завдяки можливості достатньо довго підтримувати автокодімаційне сполучення зорової труби теодоліта з відбивним оптичним елементом гірокомпаса, астрономічний азимут якого вимірює гірокомпас, дозволяє також суттєво зменшити похибки вимірювань теодолітом за рахунок зменшення випадкової складової похибки збільшенням числа прийомів, зменшення складової, залежної від нестабільності розміщення на Землі як гірокомпаса, так і теодоліта, тому що інформація про відхід гірокомпаса чи теодоліта під час винайдення азимуту буде врахована у відліках теодоліта, зменшення систематичних складових, таких як автоколімаційна та інші, за рахунок використання роботи теодоліта двома кругами та інше. Використані технічні рішення дозволили на основі автоматичного гірокомпаса ГТ-3 за рахунок методики використання і збільшення часу визначення напрямку до 70 хвилин досягнути точності ±2" (середня квадратична похибка) і надійності (імовірність безвідмовного виконання роботи дорівнює 0,997), і гарантувати що точність в складних умовах експлуатації без обов'язкового еталонування гірокомпаса перед використанням. Багаторічна експлуатація гірокомпаса довела стабільність поправки в часі, в різних температурних умовах. Робота гірокомпаса здійснюється автоматично і не залежить від кваліфікації оператора. Але гірокомпаси ГТ-3 використовують у своєму складі круговий кодовий перетворювач кута - індуктосин і комплект гіротеодоліта ГТ-3 становить складний коштовний прилад з великою вагою і габаритами, великим енергозабезпеченням (потужність від джерела споживання - 210Вт), для перевезення якого потрібен транспортний засіб (вага повного комплекту з укладкою, з палаткою і автономною станцією живлення - 470кГ, вага приладів для роботи в приміщені по автоколімаційному відбивачу - 150кГ). Трудомісткість виготовлення його велика і коштує такий прилад багато, і це не сприяє його масовому поширенню в промисловості, і він використовується переважно для виконання особливих робіт високої точності. У відомому гіротеодоліті Giromat 2000 для визначення положення динамічної рівноваги чутли 5 вого елемента гірокомпаса на його поворотному корпусі є оптичний секторний кутовий перетворювач (ОСКП) (не автоколімаційний) і механічно з ним зв'язаний теодоліт, який має круговий кодовий перетворювач кута (ККПК) [дивись "Untersuchimgen systematischer Fehlereinfasse bei Messungen mit dem Kreisel DMT Gyromat” .Dissertatian , Shaker Verlag Aachen 2003]. Після самоорієнтування, яке здійснюється за допомогою контролю ОСКП часу проходження дзеркала на ЧЕ визначеного мірного кута, розрахунку кута відхилення від напрямку на Північ і розвороту поворотного корпуса з ЧЕ на Північ за допомогою ККПК, зупиняється гіромотор і ЧЕ починає крутильні коливання навколо вертикальної вісі під впливом дії моменту підвісу. В момент зупинки ЧЕ поворотний корпус узгоджується з ним. Таким чином амплітуда коливань зменшується до значень, щоб коливання відбувалися у полі зору ОСКП для вимірювання відліків руху ЧЕ і розрахунку відліку центра коливань. Гіромотор повторно запускається, амплітуда коливань ЧЕ зменшується, і за допомогою ОСКП беруться відліки і розраховується центр прецесійних коливань. Азимут зорової труби теодоліта розраховується по двом відлікам центрів коливань - крутильних і прецесійних. Недоліками гіротеодоліта Giromat 2000 є: - складність роботи з гіротеодолітом, що вимагає високої кваліфікації від оператора; - джерело похибок у вигляді кутової нестабільності механічного з'єднання оптичного секторного кутового перетворювача і теодоліта, яке не дозволяє забезпечити високу точність гірокомпасу Giromat 2000 у складних умовах експлуатації і вимагає частого еталонування приладу при виконанні робіт; - використання теодоліта, механічно зв'язаного з поворотним корпусом і з оптичним секторним кутовим перетворювачем, що зменшує точність гіротеодоліта за рахунок збурення його при роботі з зоровою трубою, збільшує вагу, складність, трудомісткість і ціну приладу. В відомих гіротеодолітах таких як Gi-C2, MOM, Угорщина, [Н.Н. Воронков та інш. „Гироскопическое ориентирование", „Недра", 1980г., с.22], 15Ш29, 1Г17, 1Г47, гірокомпасах АГК-2, АГК-4, АГК-5 і інших, як і теодолітах, використовуються прецизійні кругові оптичні та оптично-електричні кругові перетворювачі кута, виконані на основі індуктосина або оптосина. Відомі маятникові компенсаційні гірокомпаси 1Г47 з розміщеною на поворотному корпусі (гіроблоці) системою керування рухом чутливого елемента (ЧЕ) з оптичним секторним кутовим перетворювачем, в склад якої входять дзеркало на ЧЕ, автоколімаційний вимірювач (АК) сигналу і датчик моменту з електронікою. Ця система керування утримує ЧЕ в узгодженому з АК положенні і вимірює гіроскопічний момент, який пропорційний куту відхилення вісі обертання гіромотора ЧЕ від напрямку на Північ (компенсаційний метод вимірювань). Гіроблок з АК і статором кругового кодового перетворювача кута (ККПК) зв'язаний з внутрішнім кільцем трьох кільцевого шарикового підшипника, середнє кільце - з корпусом гірокомпаса, а зовніш 83114 6 нє - з зоровою трубою і ротором ККПК. Таким чином забезпечена можливість ККПК вимірювати кути між напрямками зорової труби і АК і разом з порахованим по компенсаційному вимірюванню кутом відхилення вісі обертання гіромотора від напрямку на Північ - астрономічний азимут напрямку зорової труби. Для підвищення точності компенсаційні вимірювання виконуються в двох положеннях гіроблока: при початковому Північному орієнтуванню і повернутому на визначений, близький до 180° кут. Для цього в гірокомпасі 1Г47 є система керування, яка дозволяє встановити гіроблок на заданий відлік по ККПК, В гірокомпасі 1Г47 також є система керування, яка дозволяє через ілюмінатор оптично здійснити прив'язку АК до дзеркала чи призми БРК-180 - оптичних відбивачів, які розташовані зовні гірокомпаса. Для цього використовується оптичний перемикач у вигляді рухомої трипельпризми, який розміщений перед об'єктивом фотоелектричного автоколіматора і який по черзі формує канал візування на дзеркало ЧЕ та на зовнішній оптичний відбивач [„Гирокомпасы 1Г47 и 1Г471 Техническое описание и Инструкция по эксплуатации БЦ2.510.040 ТО» 1987]. Недоліком схеми гірокомпаса 1Г47 є використання кругового кодового перетворювача кута ККПК - індуктосина, точність якого обмежена, а вимоги до технології виготовлення і до конструкції гірокомпаса великі. За прототип гірокомпаса, що заявляється, по призначенню, по сукупності ознак та досягнутим технічним властивостям серед розглянутих, взятий пристрій для азимутального орієнтування напрямків (фактично також гірокомпас) по [заявці №20031110202 від 12.11.03р.], до якого входить корпус, поворотний відносно вертикальної осі гіроблок, підвішений усередині гіроблока маятниковий чутливий елемент з закріпленим на ньому вертикальним дзеркалом, закріплений на гіроблоці фотоелектричний автоколіматор, з можливістю його оптичного зв'язку з дзеркалом чутливого елементу, привід розвороту гіроблока відносно корпусу, який відрізняється тим, що він додатково містить в собі пристрій вимірювання горизонтальних кутових положень гіроблока у вигляді кодового датчика кута, перемикач оптичних каналів, зв'язаний з фотоелектричним автоколіматором і розташований з можливістю по черзі формувати канал візування на дзеркало чутливого елемента і канал візування в сторону напрямку, що орієнтується, причому стабільність кута між каналами візування не залежить від стабільності розміщення перемикача. [Заявка №20031110202 від 12.11.03р.]. До причин, перешкоджаючих досягненню більш високої точності з одночасним спрощенням конструкції при використанні прототипу є те, що в ньому використовується круговий кодовий перетворювач кута (ККПК), який є складним приладом, точність якого недостатня. Конструкція його складна. Він вимагає прецизійної осьової системи і старанного юстування лімбів ККПК. Його електроніка достатньо складна. Метою винаходу є підвищення точності визначення азимуту напрямку гірокомпасом при одноча 7 сному спрощенні його конструкції, зниженні трудомісткості і собівартості. Підвищення точності і спрощення конструкції при здійсненні винаходу досягається за рахунок того, що у відомому гірокомпасі , який має поворотний відносно вертикальної осі гіроблок, підвішений у середині гіроблока маятниковий чутливий елемент з закріпленим на ньому вертикальним дзеркальним відбивачем, закріплений на гіроблоці секторний перетворювач кута з перемикачем оптичних каналів, з можливістю його оптичного зв'язку з дзеркальним відбивачем чутливого елементу і зовнішнім відбивачем - контрольним елементом, привіди розвороту гіроблока і чутливого елементу з системами керування, додатково введена еталонна прямокутна призма з вертикальними дзеркальними відбивачами, з якою зв'язані секторний перетворювач кута, пристрій ідентифікації відбивача і зовнішній автоколіматор, наприклад, зорова труба автоколімаційного теодоліта. Автоколімаційний теодоліт може здійснювати оптичну “прив'язку" через ілюмінатор до одного з відбивачів еталонної призми і передавати винайдений азимут цього відбивача до напрямку, який потрібно визначити. Окрім того, в гірокомпасі для підвищення точності за рахунок виключення адитивної складової похибки визначення азимуту, яка спричинена дією постійного хибного моменту, додатково введено секторний перетворювач кута зв'язаний з відбивачами еталонної призми оптично за допомогою оптичного перемикача і системи керування, а еталонна призма має додаткові дзеркальні відбивачі, азимутальна орієнтація котрих відрізняється на 180°. Це дозволяє виконувати вимірювання азимуту на двох діаметрально протилежних дзеркальних відбивачах призми і позбуватися адитивної складової похибки гірокомпасу. Окрім того, в гірокомпасі для здійснення можливості визначення азимуту без його попереднього приблизного орієнтування, а, також, для виключення мультиплікативної похибки за рахунок неточного знання масштабного коефіцієнту, якщо вимірювання здійснюються компенсаційним методом, додатково еталонна призма має дзеркальні відбивачі, азимутальна орієнтація яких відрізняється на 90° від попередніх. Крім того, для підвищення точності визначення астрономічного азимута під час проведення регламенту базових азимутальних напрямків при стаціонарному використанні приладу, еталонна призма додатково має дзеркальний відбивач, орієнтований під кутом, який дорівнює азимуту напрямку на зовнішній стаціонарний автоколіматор. Окрім того, в гірокомпасі для підвищення точності за рахунок зменшення куга попереднього орієнтування, додатково - еталонна призма має азимутальний привід розвороту. Окрім того, в гірокомпасі для забезпечення можливості розстановки теодоліта над гірокомпасом, додатково введено перемикач оптичних каналів візування зорової автоколімаційної труби теодоліта з можливістю по черзі формувати канал 83114 8 візування на вихідне дзеркало еталонної призми і на напрямок, азимут якого визначається. Окрім того, в гірокомпасі для забезпечення можливості визначати азимут зовнішнього відбивача додатково перемикач оптичних каналів мас положення, при якому вісь візування автоколіматора гіроблока спрямована на зовнішній відбивач. Окрім того, в спосіб визначення астрономічного азимуту гірокомпасом який має поворотний відносно вертикальної осі гіроблок, підвішений у середині гіроблока маятниковий чутливий елемент з закріпленим на ньому вертикальним дзеркальним відбивачем, закріплений на гіроблоці секторний перетворювач кута з перемикачем оптичних каналів, з можливістю його оптичного зв'язку з дзеркальним відбивачем чутливого елементу, привід розвороту гіроблока з системою керування, еталонну прямокутну призму з вертикальними дзеркальними відбивачами, з якою зв'язані секторний перетворювач кута, пристрій ідентифікації відбивача (ідентифікатор відбивача) і зовнішній автоколіматор, наприклад, зорова труба автоколімаційного теодоліта, з метою підвищення точності визначення астрономічного азимуту напрямку додатково введені дії в наступній послідовності: - гіроблок (ГБ) розвертають до визначеного відбивача по інформації з пристрія ідентифікації відбивача за допомогою системи керування рухом гіроблока, - спрямовують вісь візування секторного перетворювача кута - автоколіматора гіроблока до еталонної призми за допомогою оптичного перемикача, - узгоджують вісь візування секторного перетворювача кута з нормаллю до відбивача - грані еталонної призми за рахунок розвороту гіроблока за допомогою системи керування рухом ГБ, - спрямовують вісь візування секторною перетворювача кута – автоколіматора гіроблока до дзеркала ЧВ за допомогою оптичного перемикача, - узгоджують дзеркало ЧЕ з віссю візування секторного перетворювача кута - автоколіматора за допомогою системи керування рухом ЧЕ і здійснюють вимірювання азимуту, - розраховують азимут напрямку нормалі до вихідного відбивача – вихідної грані мірної еталонної призми. Окрім того, для підвищення точності визначення азимуту напрямку при наявності попереднього орієнтування і зменшення часу визначення додатково вимірювання виконують на двох протилежних відбивачах - гранях розташованих під кутом 180° еталонної призми. Окрім того, для підвищення точності визначення астрономічного азимуту напрямку компенсаційним способом без використання інформації про попереднє орієнтування вимірювання виконують на чотирьох ортогональних гранях мірної еталонної призми. Окрім того для підвищення точності визначення азимуту напрямку зовнішнього автоколіматора додатково гірокомпас розвертають ілюмінатором еталонної призми в напрямку зовнішнього автоколіматора, узгоджують зовнішній автоколіматор з спрямованим до ілюмінатора відбивачем еталон 9 ної призми, розраховують номер відбивача (дзеркальної грані) еталонної призми, який найбільш точно спрямований на Північ, якщо інформація про попереднє азимутальне орієнтування зовнішнього автоколіматора є, і здійснюють вимірювання азимуту цього відбивача, для чого переводять оптичний перемикач в положення візування на еталонну призму, гіроблок з секторним оптичним перетворювачем кута (автоколіматором) розвертають до визначеного відбивача з пристроєм ідентифікації відбивача еталонної призми за допомогою системи керування рухом гіроблока, узгоджують вісь візування секторного кутового перетворювача гіроблока з нормаллю до відбивача еталонної призми, спрямовують оптичним перемикачем вісь візування секторного кутового перетворювача гіроблока до вертикального дзеркального відбивача на чутливому елементі, узгоджують ЧЕ з дзеркалом з віссю візування секторного кутового перетворювача гіроблока за допомогою системи керування рухом ЧЕ, здійснюють вимірювання азимуту цього відбивача еталонної призми, розраховують азимут напрямку зовнішнього автоколіматора. Окрім того, для визначення астрономічного азимуту зовнішнього відбивача гірокомпас додатково розвертають ілюмінатором гіроблока в напрямку зовнішнього відбивача, переводять оптичний перемикач напрямку візування в положення візування автоколіматора гіроблока на зовнішній відбивач, узгоджують автоколіматор гіроблока з зовнішнім відбивачем за допомогою системи керування рухом гіроблока шляхом розвороту гіроблока з автоколіматором, переводять оптичний перемикач в положення візування на еталонну призму, узгоджують наближений до ілюмінатора відбивач еталонної призми з автоколіматором за допомогою системи керування рухом еталонної призми шляхом розвороту в обмеженому куті еталонної призми (виставляють паралельно відбивачі зовнішній і еталонної призми), розраховують номер відбивача (грані) еталонної призми, який найбільш точно спрямований на Північ – “Північного" відбивача, якщо інформація про попереднє азимутальне орієнтування зовнішнього відбивача є, якщо такої інформації немає. Таким чином пропонується гірокомпас у вигляді кількох конструктивних варіантів на основі одного гіроблока, який може обертатися навколо вертикальної осі (за допомогою привіду) відносно зовнішнього корпуса, і який містить в собі підвішений маятниковий чутливий елемент з закріпленим на ньому вертикальним дзеркальним відбивачем, закріплений на гіроблоці секторний перетворювач кута з перемикачем оптичних каналів, з можливістю його оптичного зв'язку з дзеркальним відбивачем чутливого елементу, привід розвороту гіроблока з системою керування. При цьому в усіх варіантах пристрою використовується еталонна призма. На кресленнях подано: На Фіг.1 показано схему пропонованого приладу; На Фіг.2 показано варіант схеми пропонованого приладу. 83114 но: 10 В схемі приладу, показаного на Фіг.1, позначе Гіроблок - 1, чутливий елемент з підвісом (торсіонним чи магнітним) - 2, гіромотор - 3, дзеркало чутливого елементу - 4, оптичний перемикач (трипель-призма) - 5, секторний оптичний перетворювач кута (автоколіматор гіроблока) - 6, привід розвороту чутливого елементу - 7 зі статором - 8 і ротором - 9, еталонна призма з дзеркальними відбивачами - 10, підшипник -11, зовнішній корпус 12, привід розвороту гіроблоку - 13, пристрій ідентйфікації відбивача (дзеркальної грані) еталонної призми - 14, вихідна дзеркальна грань еталонної призми - 15, ілюмінатори - 16, зовнішній автоколіматор - 17, система керування розворотом гіроблока - 18, система керування розворотом чутливого елемента - 19, перемикач оптичних каналів візування зорової труби теодоліта з можливістю по черзі формувати канал візування на вихідне дзеркало еталонної призми і на напрямок, азимут якого визначається - 20, привід розвороту еталонної призми - 21. Прилад, зображений на Фіг.1, містить в собі гіроблок 1 з підвішеним на торсіонному чи магнітному підвісу маятниковим чутливим елементом 2, в якому є гіромотор 3 з горизонтальною власною віссю обертання. На чутливому елементі 2 є вертикальний відбивач (дзеркало) 4, який за допомогою оптичного перемикача (трипель-призми) 5 може бути “зв'язаний" з секторним оптичним перетворювачем кута 6, який розміщений на гіроблоці. На гіроблоці також розміщено привід розвороту 7 чутливого елементу 2, статор 8 якого зв'язаний з гіроблоком, а ротор 9 - з чутливим елементом 2, за допомогою котрого і системи керування 19 чутливий елемент може бути узгоджений з автоколіматором гіроблока. Гіроблок 1 встановлений в підшипниках 11 в зовнішньому корпусі 12. Еталонна прямокутна призма 10 розміщена на зовнішньому корпусі з можливістю прив'язки до її вихідної грані 15 через ілюмінатор 16 зовнішнього автоколіматора 17, або через перемикач оптичних каналів 20 до зовнішнього автоколіматора 17 – зорової труби теодоліта. Еталонна призма 10 за допомогою оптичного перемикача 5 також може бути зв'язана з секторним оптичним перетворювачем кута (автоколіматором гіроблока) 6. Гіроблок 1 може розвертатися в підшипниках 11 відносно зовнішнього корпуса 12 за допомогою привіда 13 і системи керування 18, а за допомогою пристрою ідентифікації грані 14 може бути ідентифіковано, яка грань еталонної призми знаходиться в полі зору автоколіматора гіроблока. Еталонна призма 10 може обертатися відносно зовнішнього корпуса за допомогою привіда 21. Робота приладу, який зображений на Фіг.1 відбувається таким чином: Зовнішній теодоліт встановлюється на землі на заздалегідь позначеному місці і орієнтується на місцеві орієнтири, приблизний азимут яких відомий. Для забезпечення можливості гіроблоку 1 попередньо орієнтуватися по напрямку на Північ розраховуються напрямки, де можна встановлювати гірокомпас і які з граней еталонної призми 10 будуть при цьому зорієнтовані на Північ. Таких 11 напрямків може бути стільки, скільки граней є у еталонної призми 10. В одному найбільш зручному напрямку встановлюється зорова труба 17 теодоліта. Напроти труби встановлюється гірокомпас так, щоб між дзеркальним відбивачем еталонної призми 10, яка розташована за ілюмінатором 16, вихідною гранню 15 і зоровою трубою 17 автоколімаційного теодоліта був автоколімаційний зв'язок. Зовнішній автоколімаційний теодоліт також може бути встановлений на гірокомпас і його зорова труба зв'язана з вихідною гранню 15 еталонної призми 10 за допомогою трипель призми - оптичного перемикача 20. Це дасть змогу суттєво спростити розстановку гіротеодоліта. Гіроблок 1 за допомогою привіду 13 і пристрою ідентифікації граней 14 розвертається на потрібну “Північну" грань, і за допомогою системи керування гіроблоком 18 при положенні 2 оптичного перемикача автоколімаційно з нею узгоджується. Таким чином здійснюється попередня виставка гіроблока на “Північну" грань. Після розгону гіромотора і вивільнення (розаретування) чутливого елемента система керування рухом 19 узгоджує положення дзеркала ЧЕ з автоколіматором гіроблока через оптичний перемикач, який знаходиться в позиції 3, і виконується вимірювання азимуту “Північної" грані еталонної призми. Вимірювання може виконуватися як компенсаційним методом, так і по вільному некерованому руху чутливого елемента шляхом розрахунків траєкторії по відлікам секторного перетворювача кута. Гіроблок 1 розвертається на протилежну – “Південну" грань, як це робилося при виставці на “Північну", і за допомогою системи керування – 18 автоколімаційно з нею узгоджується, і виконується вимірювання азимута “Південної" грані еталонної призми. Азимут вихідної грані 15, до якої “прив'язаний" теодоліт, визначається по даним вимірювань азимутів на обох: “Південній" та “Північній" гранях. Якщо орієнтування гірокомпасом зовнішнього автоколіматора (зорової автоколімаційної труби теодоліта) 17 треба проводити в місці, де невідомий попередньо азимут, то після узгодження вихідної грані - 15 еталонної призми з зовнішнім автоколіматором вимірювання здійснюються на чотирьох гранях еталонної призми: на вихідній грані – 15 і протилежної їй і на гранях, які знаходяться під кутом 90° до перших. Азимут вихідної грані – 15 розраховується по даним вимірювань азимутів чотирьох граней. Згідно з результатами, здійснюється попереднє орієнтування гірокомпаса і вимірювання так, як це було показано раніше. Якщо гірокомпасу потрібно визначити азимут контрольного елементу, у вигляді зовнішнього відбивача, то зовнішній відбивач доцільно попередньо орієнтувати у площину астрономічного меридіану, а гірокомпас розмістити так, щоби автоколіматор гіроблока через ілюмінатор 16 був спрямований на зовнішній відбивач. Оптичний перемикач (трипель призма) 5 виводиться з поля зору автоколіматора і займає положення 1. За допомогою системи керування 18 з привідом 13 автоколіматор гіроблока 6 узгоджується з зовніш 83114 12 нім КЕ контрольним елементом у вигляді відбивача. На Фіг.2 показано інший варіант схеми пропонованого приладу. Позначення аналогічні з Фіг.1. Схема приладу, зображеного на Фіг.2, відрізняється тим, що еталонна призма 10 зв'язана жорстко з автоколіматором 6 гіроблока 1 (виконана в моноблоці з автоколіматором) так, що автоколіматор спрямований в напрямку однієї з граней еталонної призми, а пристрій ідентифікації грані - 14 розміщено між гіроблоком і зовнішнім корпусом гірокомпаса і він визначає, яка грань еталонної призми 10 спрямована на ілюмінатор 16 гірокомпаса. Робота приладу по схемі на Фіг.2 відрізняється від схеми на Фіг.1 тільки тим, що за допомогою ідентифікатора грані 14 потрібна грань еталонної призми спрямовується до ілюмінатора грубо, а зовнішній автоколіматор зв'язується з гранню автоколімаційно і по датчику кута, зв'язаного з цим автоколіматором береться відлік. Для пояснення можливості підвищення точності і спрощенні конструкції гірокомпаса за рахунок запропонованого звернемося до додаткових пояснень. Загальним недоліком схем гірокомпасів, які використовують кругові кодові перетворювачі кута (ККПК) такі, як індуктосини, оптосини, слід вважати занадто складну конструкцію і обмежену точність в першу чергу за рахунок недостатньої точності ККПК і надвисоких вимог з боку ККПК до технології його виготовлення і до конструкції гірокомпаса, якщо намагатися цієї точності досягнути. Отримання гірокомпасу з надвисокою точністю при використанні цієї схеми вимагає над зусиль і над витрат, що робить гірокомпас досить дорогим і не конкурентоздатним в наш час при використанні в промисловості. Мірою кута ККПК - індуктосина чи оптосина є лімб з нанесеними ділильними машинами штрихами. Похибки індуктосина в першу чергу визначаються технологією його виготовлення а, також, стабільністю його конструкції і параметрів в експлуатації. Так [Бычатин Д.А., Гольдман И.А. „Поворотный индуктосин". „Энергия", Ленинградское отделение. 1989] нанесення провідників з точністю 10" для індуктосина з числом пар полюсів 128 викликає похибку ±1", з числом пар полюсів 256 0,7". Для отримання максимальної похибки ±1" індуктосина з діаметром 90мм за рахунок ексцентриситету обмоток треба, щоб ексцентриситет не перевищував 0,01мм. Торцеве биття 0,01мм викликає похибку індуктосина ±4". Не плоскість обмоток 0,01мм спричинює похибку індуктосина ±2". На думку авторів середня квадратична похибка ±5" досяжна для індуктосина з діаметром 90мм за умови виконання позначених вище вимог, а для зменшення похибки індуктосина до одиниць чи частки секунди потрібно виконання цілого комплексу складних технічних заходів, які в цитованій літературі не приведені. По результатах виготовлення і випробувань індуктосинів на осьових системах гірокомпаса ГТ-3 на заводі “Арсенал" гранична похибка вимірюван 13 ня кута була в межах ±2,7" [„Комплекс гиротеодолита ГТ-3. Технические условия. БЦ 1.620.125 .ТУ", п.1.6.7, стр.15, 1987г.]. Похибки оптосина вважаються дещо меншими за похибки індуктосина, але по результатах розробки, виготовлення і випробувань на заводі “Арсенал" гірокомпаса АГК-5 [„Технические условия БЦ 1.620.122 ТУ АГК-5" 1982] середня квадратична похибка вимірювання кута оптосином була в межах ±1,5", що дорівнює граничній похибці ±4,5". Перевірка точності індуктосинів та оптосинів на підприємстві “Арсенал” виконувалась за допомогою мірної еталонної багатогранної призми, кути між гранями котрої виміряються на лазерному гоніометрі з середньою квадратичною похибкою ±(0,1-0,3)". Ця призма за рахунок стабільності зберігає свою форму у часі і різних умовах експлуатації, що дозволяє їй бути еталоном чи мірою кутів для перевірки індуктосинів та оптосинів, значно перевершуючи їх по точності. Фірма Хейденхайн, Німеччина, місто Траунпойт, виготовляє оптичні перетворювачі - накопичувачі кутових переміщень: - шифру ERO, які не мають власного підвісу, і які без урахування похибок, спричинених точністю 83114 14 виставки центру поділу штрихів лімба відносно центру його обертання, концентричності обертання лімба, від биття та перекосів лімба, мають для ERO 785 точність ±2,2" при зовнішньому діаметрі – 257мм. і точність - ±4,2" при зовнішньому діаметрі – 130мм., - шифру RON з власним підвісом, які без урахування похибок монтажу в гірокомпасі мають для RON 786 точність ±2,0" при зовнішньому діаметрі 200мм, внутрішньому 60мм. На прикладі гірокомпаса з компенсаційним вимірюванням азимута побачимо, як можна досягнути високої точності з використанням еталонної призми з чотирма близькими до ортогональних граней - дзеркальних відбивачів. Розробимо алгоритм перетворення інформації, яка вимірюється в гірокомпасі, в азимут напрямку вихідної грані. Диференціальні рівняння прецесійного руху маятникового чутливого елементу гірокомпаса при компенсаційному вимірюванні азимуту можуть бути записані як & Hb + H Wg × sin f + M хибн = -К ДМ × Uвимір ; (1) & - Hf + mgr × b - HW z = 0; Таблиця H Wg , W z кінетичний момент гіроскопа & f, f горизонтальна та вертикальна проекції кутової швидкості обертання Землі & b, b m Маcа ЧЕ g Прискорення вільного падіння r Відстань від точки підвісу до центру мас & & В сталому виді f = b = 0 замість (1) можна записати: HWg Mхибн × sin f + = Uвимір ; - K ДМ - K ДМ (2) mgr × b - HWz = 0 ; H Мхибн = K; = U(0 ); - K ДМ - K ДМ Отримаємо рівняння вимірювання: Uвимір = K × Wg sin f + U(0); Позначимо В подальшому замість Uвимір будемо використовувати U. Для визначення астрономічного азимута f нормалі до “Північної" грані еталонної призми виконуються компенсаційні вимірювання напруги Uі на вимірювальному опорі, яке включено послідовно з ротором привіда чутливого елемента, в чотирьох орієнтуваннях гіроблока, які задаються чотирма близькими до ортогональних (похибка di i 0,1,2,3; ) дзеркальними гранями бага= K ДМ Кут, кутова швидкість обертання ЧЕ гірокомпасу навколо вертикальної (вихідної) вісі. Кут, кутова швидкість обертання ЧЕ гірокомпасу навколо горизонтальної (вимірювальої) вісі. Масштабний коефіцієнт ЧЕ гірокомпасу Мхибн Хибний момент Uвимір Вихідний сигнал гірокомпасу тогранної еталонної призми. Враховується також масштабний коефіцієнт К та його мала зміна DK i від вимірювання до вимірювання ( i = 0,1,2,3 ). 3 урахуванням вищесказаного рівняння чотирьох вимірювань можна записати таким чином: U0 = (K + DK 0 ) × W g sin(f + d0 ) + U(0 )0 U1 = (K + DK1) × W g sinæ f + 90o + d1ö + U(0 )1 ç ÷ è ø U2 = (K + DK 2 ) × Wg sinæ f + 180o + d2 ö + U(0 )2 ç ÷ è ø (3) U3 = (K + DK3 ) × Wg sinæ f + 270o + d 3 ö + U(0 )3 ç ÷ è ø Де Wg - горизонтальна проекція кутової швидкості обертання Землі, U(0 )i - та частина напруги, яка компенсує хибний неінформативний момент. Перетворимо систему (3). 15 83114 16 () 0 ( Uвимір - Uвимір = (K + DK 0 ) × Wg sin(f + d0 ) + U() 0 + K + DK 2 )× Wg sin(f + d2 ) + U 0 2 = 2 0 2f + d0 + d2 ù d - d2 é DK DK 2 cos 0 = 2KWg sin + K × Wg × ê 0 × sin(f + d0 ) + × sin(f + d2 )ú + DU(0)0 _ 2; K 2 2 û ë K (4) ) () Uвимір - Uвимір = (K + DK1 )× W g сos(f + d1) + U (0 1 +( K + DK 3 ) × W g cos (f + d3 ) + U 0 3 = 3 1 2f + d1 + d3 d -d é DK DK3 ù вр ; cos 1 3 + K × Wg × ê 1 × cos(f + d1) + = 2 × K × W g × cos × cos(f + d 3 )ú + DU(0) 1_ 3 K 2 2 ë K û (5) DU(0)вр = U(0)вр - U(0)вр 0 _2 0 2 де DU(0)вр = U(0)вр - U(0)вр 1_ 3 1 3 Поділимо (4) на (5). Одержимо U -U z= 0 2 = U1 - U3 (6) æ d +d ö d -d é DK DK ù 2KWg sinç f + 0 2 ÷ cos 0 2 + K × Wg × ê 0 × sin(f + d0 ) + 2 × sin(f + d2 )ú + DU(0)вр 2 0_ K 2 ø 2 è ë K û = æ d1 + d3 ö d1 - d3 é DK1 DK3 ù вр 2 × K × Wg × cosç f + + K × Wg × ê × cos(f + d1) + × cos(f + d3 )ú + DU(0 )1 _ 3 ÷ cos K 2 ø 2 è ë K û d +d DK0 DK sin 0 2 × sin(f + d0 ) + 2 × sin(f + d2 ) Daвр 0_ 2 K 2 + K + d0 + d2 d0 - d2 d0 + d2 d0 + d2 d0 - d2 d0 + d2 d -d 2 × sin f × cos cos 2 × cos f × cos cos × cos × cos × cos 0 2 2 2 2 2 2 2 2 × = d +d d -d d +d DK1 DK вр cos 1 3 × cos 1 3 sin 1 3 × cos(f + d1) + 3 × cos(f + d3 ) Da1_ 3 K 2 2 2 1 - tgf × + K + d1 + d3 d1 + d3 d1 - d3 d +d d -d 2 × cosf × cos 2 × cosf × cos 1 3 × cos 1 3 cos × cos 2 2 2 2 2 tgf + Da0 _ 2 = DU(0)0 _ 2 K × Wg ; Da1 _ 3 = DU(0)1_ 3 K × Wg Звідки можна отримати явний вираз для tg f . tgf = Z × (cos d1 + cos d3 ) - (sin d0 + sin d2 ) + cos d0 + cos d 2 + Z - (sin d1 + sin d3 ) ù DK0 DK2 é DK DK3 Z × ê 1 × cos(f + d1) + × sin(f + d0 ) + × sin(f + d2 ) × cos(f + d3 )ú K K K û ë K + + cos f × [cos d0 + cos d2 + Z × (sin d1 + sin d3 )] + вр Z × Da1_ 3 - Daвр 2 0_ cos f × [cos d0 + cos d2 + Z × (sin d1 + sin d3 )] (7) ; Знайдемо явний вираз для вимірюваного азимуту f по чотирьох ортогональних вимірюваннях: Введемо = tg f + + в (7) заміну = Z Uвимір - Uвимір 2 0 ; Uвимір - Uвимір 3 1 (U0 - U2 ) × (cos d1 + cos d3 ) - (U1 - U3 ) × (sin d0 + sin d2 ) + (U1 - U3 ) × cos d0 + cos d2 - (U0 - U2 ) × (sin d1 + sin d3 ) (U0 - U2 ) × é DK1 × cos(f + d1) + DK3 × cos(f + d3 )ù - (U1 - U3 ) × æ DK0 × sin(f + d0 ) - DK 2 × sin(f + d 2 )ö ç ÷ ê ú ë K K K û è K cos f × [(U1 - U3 ) × (cos d0 + cos d2 ) + (U0 - U2 ) × (sin d1 + sin d3 )] (U0 - U2 ) × Daвр 3 - (U1 - U3 ) × Daвр 2 0_ 1_ = cos f × [(U1 - U3 ) × (cos d0 + cos d2 ) + (U0 - U2 ) × (sin d1 + sin d3 )] Позначимо _ S = C = (U0 - U2 )× (cos d1 + cos d3 ) - (U1 - U3 )× (sin d0 + sin d2 ); (U1 - U3 )× cos d 0 + cos d 2 + (U0 - U2 ) × (sin d1 + sin d3 ); (8 ) ø+ 17 83114 18 Одержимо S tg f = + C + + + (U0 - U2 ) × é DK1 × cos(f + d1) + DK 3 × cos(f + d3 )ù - (U1 - U3 ) × æ DK0 × sin(f + d0 ) - DK 2 × sin(f + d2 )ö ç ÷ ê ú K ë K (U0 - U2 ) × Daвр 3 - æU1 - Uв ö × Daвр 2 ç 3÷ 0_ 1_ è cos f × C ø = K è K û cos f × C ø+ S + C (9) (U0 - U2 )× é DK1 × cos(f + d1) + DK 3 × cos(f + d3 )ù - (U1 - U3 ) × æ DK 0 × sin(f + d0 ) - DK 2 × sin(f + d2 )ö ç ÷ ê ú K ë K û cos f × C (U0 - U2 )× Daвр 3 - æU1 - Uв ö × Daвр 2 ç 3÷ 0_ 1_ è cos f × C ø K è K ø+ ; Перетворимо другий додаток вище приведеного виразу (9): (U0 - U2 ) × é DK1 × cos (f + d1) + D K 3 × cos (f + d3 )ù - (U1 - U3 ) × æ D K 0 × sin (f + d0 ) - DK 2 × sin(f + d2 )ö ç ÷ ú ê ë K K û cos f × C è K K ø Після розкладу функції cos(f + di ) , sin(f + di ) і перегрупуванню отримаємо: DK3 DK2 1 é ù é DK öù æ DK = × ê (U0 - U2 ) × ê 1 × cos d1 + × cos d3 ú - (U1 - U3 ) × ç 0 × sin d0 × sin d 2 ÷ ú K K C ë û ë K øû è K tgf é ù öù é DK DK3 æ DK0 DK2 × ê (U0 - U3 ) × ê 1 × sin d1 + × sin d 3 ú + (U1 - U3 ) × ç × cos d0 × cos d2 ÷ú = C ë K K K K û øû ë è DK DK = 1 - tg f × 2 ; C C Де é DK3 DK 2 ù é DK öù æ DK 0 DK = ê(U0 - U2 ) × ê 1 × cos d1 + × cos d3 ú - (U1 - U3 ) × ç × sin d0 × sin d 2 ÷ ú; 1 K K K K û ë øû è ë é DK 2 DK 3 ù öù æ DK0 é DK × cos d0 × cos d2 ÷ ú; DK = ê(U0 - U2 ) × ê 1 × sin d1 + × sin d3 ú + (U1 - U3 ) × ç 2 K K û øû è K ë K ë Перетворимо третій додаток вище приведеного виразу (9): вр (U0 - U2 ) × Da1 _ 3 - (U1 - U3 ) × Daвр 2 0_ cos f × C = Da _ ввр cos f × C вр вр ; Da _ ввр = (U0 - U2 )× Da - (U1 - U3 ) × Da 0_ 2 1_ 3 K K S D1 tg f × D2 D a _ вр ; + + C cos f × C C C K tg f × DK S D 2 + D a _ вр tg f = + 1 C cos f × C C C ; tg f = (10) Знайдемо вираз для азимуту “Північної” грані f З урахуванням прийнятих позначень отримано точний вираз для tg f Kö æ æ DK ö ÷ ç S D ÷ D a _ вр ç sin f × ç 1 + 2 ÷ - cos f × ç + 1 ÷ = ; C ÷ С çC C ÷ ç ø ø è è Позначимо 2 A= æ æ DK ö DK ç 2÷ +çS + 1 ç1+ ÷ ç C ÷ ç çC C è ø è K æ æ DK ö ç S D1 ç 2÷ 2 ç1+ ÷ çC + C ö C ÷ ç ç ÷ ø = cos d; _ è è ÷ ;_ A A ÷ ø ö ÷ ÷ ÷ ø 19 83114 20 K K S D1 S D1 + + D a _ вр sin d = C C ; _____ d = arctg C C ; sin(f - d ) = ; ____ tgd = С cos d DK DK 1+ 2 1+ 2 C C f - d = arcsin D a _ вр С K S D1 + S + DK D a _ вр D a _ вр 1; + arctg C C = arcsin + arctg f = arcsin C C C + DK DK 2 1+ 2 C Азимут вихідної грані гірокомпаса A вих З урахуванням кута між вихідною гранню і “Північною” i 360o ai = × i + å di , (12) n j= 0 де n - кількість граней у еталонної призми, і номер “Північної" грані можна визначити як A вих = f + aі; (13) Отримані вирази (13), (12), (11) складають точний (без методичної похибки) алгоритм обробки інформації у пропонованому гірокомпасі. Алгоритм дозволяє знайти астрономічний азимут без використання інформації про масштабний коефіцієнт і хибний неінформативний момент, якщо ці величини сталі в одному окремо взятому визначенні азимуту, а, також урахувати їх, якщо закон зміни їх відомий. Щ можливості є запорукою отримання високої точності пропозиції і вигідно відрізняють її від відомих гірокомпасів. Це дозволяє також відмовитись від складних систем для стабілізації як масштабного коефіцієнту, так і хибного моменту в експлуатації і тим самим здешевіти виготовлення гірокомпасу. Пропозиція принципово дозволяє проводити в технологічному режимі самоеталонування гірокомпаса: визначати зміни масштабного коефіцієнта і хибного неінформативного моменту і ураховувати їх в штатному режимі визначення азимуту для підвищення точності. Аналіз виразу для азимуту “Північної" грані призми показує, що похибка зростає з ростом кута відхилення “Північної" грані еталонної призми при вимірюваннях від напрямку на “Північ". Тому доцільно зменшувати цей кут за допомогою пристрою повороту призми по результатах вимірювань і проводити повторно вимірювання. При використанні пропозиції для визначення астрономічного азимута під час проведення регламенту базових азимутальних напрямків при стаціонарному використанні приладу і малих можливих їх змінах, з метою досягнення максимальної точності, доцільно мати еталонну призму з гранню, спрямованою по базовому азимутальному напрямку, так, щоб “Північна" грань була з максимальною точністю орієнтована на “Північ". (11) Таким чином пропонований гірокомпас має можливість забезпечити більш високу точність за рахунок: - використання еталонної призми з дзеркальними гранями, кути між якими паспортизовані з надвисокою точністю; - використання оптичної прив'язки автоколіматора гіроблока і зовнішнього автоколіматора (автоколімаційного теодоліта) до граней еталонної призми, точність якої ще вища; - методу вимірювань в чотирьох ортогональних положеннях, які забезпечуються прив'язкою автоколіматора гіроузла до чотирьох ортогональних граней еталонної призми, з забезпеченням достатньо малої випадкової складової похибки; - алгоритму точного визначення азимуту вихідної грані еталонної призми, в якому ураховані малі неортогональності кутів призми, несталі хибні моменти і масштабні коефіцієнти і який не має методичної похибки, - алгоритму точного визначення азимуту вихідної грані, на який не мають вплив невідомі сталі хибний момент, масштабний коефіцієнт, тому, що вони виключені з розрахункової формули і, таким чином, не впливають на склад похибок; - можливістю використання технологічного алгоритму паспортизації параметрів гірокомпаса і урахування їх змін в алгоритмі точного визначення азимуту з метою виключення зі складу похибок. Пропозиція гірокомпасу забезпечує більш високу технологічність гірокомпаса за рахунок використання еталонної призми і за рахунок використання оптичної прив'язки як до дзеркала чутливого елементу, так і до дзеркальних граней еталонної призми: - вимоги еталонної призми до вісі обертання (не треба забезпечувати жорсткі вимоги до биття осі, ексцентриситету закріплення на вісі, і т. і.) значно нижчі ніж для кругового кодового перетворювача кута (індуктосина, оптосина); - еталонна призма значно простіша за конструкцією ніж кодовий кутовий перетворювач, наприклад, індуктосин чи оптосин; - відсутність будь якої електроніки для еталонної призми; - ідентичність електроніки для забезпечення оптичної прив'язки як до дзеркала чутливого елемента, так і до граней еталонної призми; 21 83114 Використання алгоритмів ортогональних вимірювань дозволяє підвищити його технологічність за рахунок зниження вимог: - до точності системи стабілізації частоти обертання ротора гіромотора; - до точності стабілізації масштабного коефіцієнту; - до точності знання географічної широти місця роботи гірокомпас; Пропозиція гірокомпасу забезпечує нижчу собівартість приладу за рахунок: Комп’ютерна верстка В. Клюкін 22 - відсутності в конструкції гірокомпасу жорстких вимог до вісі обертання гіроблока і еталонної призми; - собівартості еталонної призми, яка нижча за кодовий кутовий перетворювач; - відсутності електроніки для еталонної призми; - відсутності жорстких вимог до стабільності систем гірокомпаса від визначення до визначення азимута. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro-compass
Автори англійськоюBuzanov Viktor Ivanovych, Golik Marat Mykolaiovych, Dmitriev Oleksii Yuriiovych, Kopytko Valerii Pavlovych, Mashynistov Eduard Serhiiovych, Sydorenko Yurii Zakharovych, Sychykov Oleksandr Oleksandrovych, Sosunovskyi Oleksandr Sergiiovych, Shut Volodymyr Petrovych
Назва патенту російськоюГирокомпас
Автори російськоюБузанов Виктор Иванович, Голик Марат Николаевич, Дмитриев Алексей Юрьевич, Копитько Валерий Павлович, Машинистов Эдуард Сергеевич, Сидоренко Юрий Захарович, Сичиков Александр Александрович, Сосуновский Александр Сергеевич, Шуть Владимир Петрович
МПК / Мітки
МПК: G01C 19/00
Мітки: гірокомпас
Код посилання
<a href="https://ua.patents.su/11-83114-girokompas.html" target="_blank" rel="follow" title="База патентів України">Гірокомпас</a>
Гірокомпас

Номер патенту: 68089
Опубліковано: 15.07.2004
Автор: Янкелевич Григорій Євсійович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гірокомпас, який містить курсовий гіроскоп, встановлений на горизонтальній платформі, який відрізняється тим, що датчик кута, вісь якого паралельна горизонтальній площині платформи, який видає сигнал про відхилення вектора кінетичного моменту ротора гіроскопа від горизонтальної площини платформи, електрично з'єднаний через підсилювач з датчиком моменту гіроскопа, який розташований співвісно з зазначеним датчиком кута.
Гірокомпас

Номер патенту: 19719
Опубліковано: 25.12.1997
Автори: Аврутов Вадим Вікторович, Старицький Лев Павлович, Шемелін Анатолій Валентинович, Дедок Ігорь Алєксєєвіч, Збруцький Олександр Васильович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий корпус с установленным на платформе в кардановом подвесе динамически настраиваемым гироскопом с двумя датчиками угла и двумя датчиками момента, датчик наклона платформы относительно ее горизонтальной оси вращения и термодатчик, расположенные на платформе, третий и четвертый датчики момента, установленные по осям карданова подвеса платформы и третий датчик угла, установленный на вертикальной оси карданова подвеса, два...
Гірокомпас

Номер патенту: 24069
Опубліковано: 31.08.1998
Автори: Андрущик Володимир Петрович, Дєдок Ігорь Алєксєєвіч, Збруцький Олександр Васильович, Старицький Лев Павлович, Шемелін Анатолій Валентинович, Аврутов Вадим Вікторович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
1. Гирокомпас, содержащий центральный прибор с трехстепенным гироскопом и индикатором горизонта, прибор управления и коррекции, таймер, первый элемент И и первый триггер, при этом выход β индикатора горизонта центрального прибора соединен с первым входом прибора управления и коррекции, второй вход которого соединен с первым выходом таймера, третий выход таймера соединен со вторым входом первого элемента И, четвертый выход таймера...
Гірокомпас

Номер патенту: 843
Опубліковано: 15.12.1993
Автори: Андрущик Володимир Петрович, Шемелін Анатолій Валентинович, Аврутов Вадим Вікторович, Дєдок Ігор Олексійович, Старицький Лев Павлович, Збруцький Олександр Васильович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий платформу в кардановом подвесе, динамически настраиваемый гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, расположенные на платформе, два двигателя стабилизации, установленные по осям карданова подвеса, датчик курса, два блока формирования сигнала стабилизации и блок формирования управляющих и корректирующих сигналов, при этом ось чувствительности акселерометра параллельна главной оси...
Гіротеодоліт

Номер патенту: 75648
Опубліковано: 15.05.2006
Автори: Сосуновський Олександр Сергійович, Бузанов Віктор Іванович, Копитько Валерій Павлович, Сичиков Олександр Олександрович, Ніжник Ігор Іванович, Єсипенко Станіслав Іванович, Голік Марат Миколайович, Баснін Борис Опанасович, Шуть Володимир Петрович, Дітюк-Сніцаренко Павло Степанович, Сидоренко Юрій Захарович, Вірко Володимир Дмитрович
МПК: G01C 19/00
Мітки: гіротеодоліт
Формула / Реферат:
1. Гіротеодоліт, до складу якого входить корпус, поворотний відносно вертикальної осі гіроблок, підвішений в гіроблоці гіроскопічний маятниковий чутливий елемент з вертикальним дзеркалом, закріплений на гіроблоці фотоелектричний автоколіматор з можливістю його оптичного зв'язку з дзеркалом чутливого елемента, привід розвороту гіроблока відносно корпусу, теодолітна алідада, виконана з можливістю її повороту відносно вертикальної осі і оснащена...
Попередній патент: Спосіб маркування ковбасних виробів
Наступний патент: Ферментатор
Випадковий патент: Спосіб оцінки технології вирощування зернових культур за показниками вилягання рослин