Гірокомпас

Формула / Реферат
Гірокомпас, який містить курсовий гіроскоп, встановлений на горизонтальній платформі, який відрізняється тим, що датчик кута, вісь якого паралельна горизонтальній площині платформи, який видає сигнал про відхилення вектора кінетичного моменту ротора гіроскопа від горизонтальної площини платформи, електрично з'єднаний через підсилювач з датчиком моменту гіроскопа, який розташований співвісно з зазначеним датчиком кута.
Текст
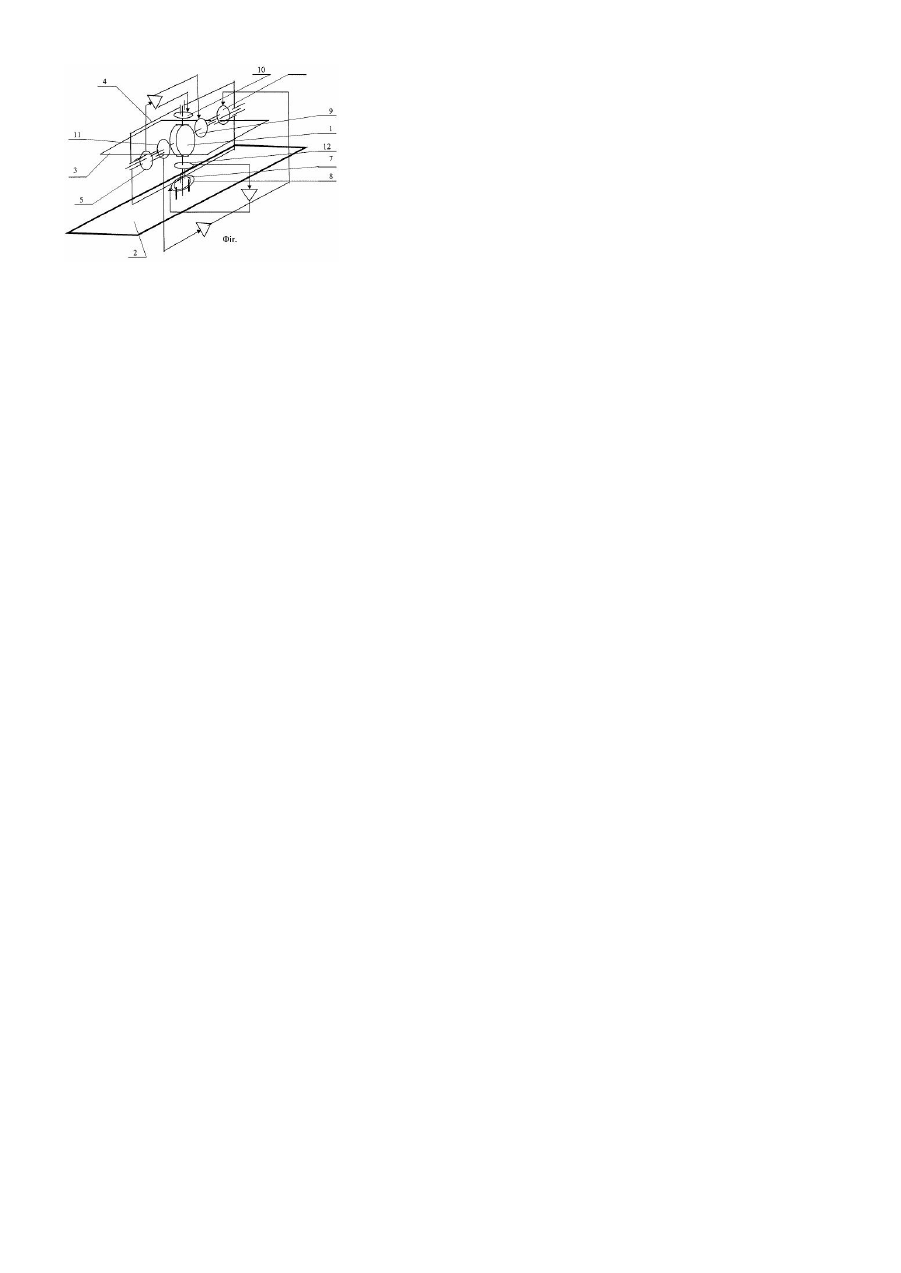
Гірокомпас відноситься до приладобудування, зокрема до навігаційного приладобудування. Аналогом є гірокомпас з горизонтальною платформою, який описано в книзі Пельпора Д.С., Михалева В.А., Баумана В.А. и др. Гироскопические системы. Гироскопические приборы и системы.- М.: Высш. шк., 1988. - С.212216 та в статті Г.В. Попова, В.И. Эйдельнанта, В.А. Анисимова, В.Г. Попова Наземный гирокомпас на базе гирогоризонта, построенного на ДНИ/ Механіка гіроскопічних систем.-1999-2000. - Вип.15-16. - С.244-247. Зазначені аналоги використовують для визначення меридіану інформацію з датчиків кутової швидкості, які чутливі до динамічних збурень, і тому ці гірокомпаси можуть застосовува тись тільки як наземні. Відомо гірокомпас, який містить курсовий гіроскоп, встановлений на горизонтальній платформі. Цей пристрій описано в статті О.В. Збруцький, О.І. Нестеренко, А.В. Шевчук Математична модель однієї схеми курсокренопокажчика // Ме ханіка гіроскопічних систем. – 2001 - 2002. - Вип.17-18. - С.154-167. Пристрій, що заявляється, також містить курсовий гіроскоп, встановлений на горизонтальній платформі. Недоліком відомого пристрою є те, що в ньому курсовий гіроскоп працює в режимі гіроазимута, а не в режимі гірокомпасу. Це відбувається в наслідок того, що в відомому пристрої не має необхідних електричних зв'язків, через які б на датчик моменту гіроскопа, вісь якого горизонтальна, поступали сигнали про відхилення вектору кінетичного моменту ротора гіроскопа від площини горизонту. В основу винаходу поставлена задача забезпечення роботи пристрою в режимі гірокомпаса, який менш чутливий до динамічних збурень, шляхом накладання на курсовий гіроскоп необхідних корегуючих моментів, що приводять курсовий гіроскоп в меридіан за рахунок того, що датчик кута, вісь якого паралельна горизонтальній площині платформи, який видає сигнал про відхилення вектору кінетичного моменту ротора гіроскопа від горизонтальної площини платформи, електричне з'єднується через підсилювач з датчиком моменту гіроскопа, який розташовані співвісно з зазначеним датчиком кута. Гірокомпас, функціональна схема якого зображена на кресленні, складається з курсового гіроскопа 1 на базі динамічно настроюванного гіроскопа (ДНГ), що розташований на горизонтальній платформі 2. Горизонтальна слідкуюча рамка 3 та вертикальна слідкуюча рамка 4 призначені для слідкування за ротором ДНГ. Датчик кута горизонтальної слідкуючої рамки 5 визначає положення цієї рамки відносно платформи 2. 6- датчик моменту горизонтальної слідкуючої рамки. Датчик кута 7 вертикальної слідкуючої рамки визначає положення цієї рамки відносно вертикальної вісі платформи 2. 8- датчик моменту вертикальної слідкуючої рамки; 9, 10- датчики моменту та 11, 12- датчики кута ДНГ. Цей прилад працює наступним чином. По сигналах датчика кута 11 ДНГ, які через підсилювач поступають на датчик моменту 6, забезпечуєтся поворот рамки 3 навколо горизонтальної осі за ротором 1 ДНГ. Як виконуючий орган використовується датчик моменту 6. По сигналах датчика кута 12 ДНГ, які через підсилювач поступають на датчик моменту 8, забезпечується поворот рамки 4 навколо вертикальної осі за ротором 1 ДНГ. Як виконуючий орган використовується датчик моменту 8. Зазначені слідкуючі системи забезпечують роботу ДНГ в режимі вільного гіроскопа. Приведення в меридіан вектора кінетичного моменту ротора ДНГ 1 відбувається по сигналах датчика кута 5, який через підсилювач подається на датчики моменту 9, 10ДНГ. Зазначений датчик 5 вимірює кут між горизонтальною платформою 2 та ротором 1 ДНГ без урахування похибок слідкуючої системи рамки 3. Курсовий кут видається з датчика кута 7. Зазначений прилад може працювати і без слідкуючої системи, яка включає рамку 3, датчик кута 5 та датчик моменту 6. В цьому випадку датчик 11 вимірює кут між горизонтальною платформою 2 та ротором 1 ДНГ, а приведення в меридіан вектора кінетичного моменту ротора 1 ДНГ відбувається по сигналах зазначеного датчика кута 11, який через підсилювач подається на датчики моменту 9, 10 ДНГ. Рівняння, що описують роботу гірокомпасу наступні kk y e · b ду + b ду + w h a + w x =- · d H , · kk y a - wh b ду b + w z = w hd H ду b де d - похибка горизонтування платформи; ду - кут між вектором кінетичного моменту Н ротора ДНГ та k платформою; a - кут відхилення вектора кінетичного моменту ротора ДНГ від меридіану; y - коефіцієнт передачі підсилювача, що видає сигнал на датчик моменту, розташований на горизонтальній вісі ДНГ; e k коефіцієнт зниження відносно y коефіцієнта передачі підсилювача, що видає сигнал на датчик моменту, w ,w , w розташований на вертикальній вісі ДНГ; k - коефіцієнт передачі датчиків моменту ДНГ; x h z - складові кутової швидкості розвороту географічної системи координат у якої записані зазначенні рівняння. Зазначенні рівняння подібні до тих, що описані в книзі А.А. Одинцова Теория и расчет гироскопических приборов. - К.: Вища школа, 1985. - С.156, та показують можливість функціювання заявляємого гірокомпасу. Здійснення винаходу забезпечується можливістю виконати зазначені електричні з'єднання між датчиком кута та моменту, а також підтверджується наведеними вище рівняннями роботи гірокомпасу. Зменшення чутливості заявляємого гірокомпасу до динамічних збурень обумовлено тим, що цей гірокомпас не потребує для проведення в меридіан інформації з датчиків кутової швидкості і, крім того, кут відхилення вектора кінетичного моменту ротора гіроскопа вимірюється відносно горизонтальної платформи, а не визначається, наприклад, по сигналах акселерометрів, які як і датчики кутової швидкості більш чутливі до динамічних збурень.
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro compass
Автори англійськоюYankelevych Hryhorii Yevsiiovych
Назва патенту російськоюГирокомпас
Автори російськоюЯнкелевич Григорий Евсеевич
МПК / Мітки
МПК: G01C 19/00
Мітки: гірокомпас
Код посилання
<a href="https://ua.patents.su/2-68089-girokompas.html" target="_blank" rel="follow" title="База патентів України">Гірокомпас</a>
Гірокомпас

Номер патенту: 843
Опубліковано: 15.12.1993
Автори: Збруцький Олександр Васильович, Андрущик Володимир Петрович, Старицький Лев Павлович, Аврутов Вадим Вікторович, Дєдок Ігор Олексійович, Шемелін Анатолій Валентинович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий платформу в кардановом подвесе, динамически настраиваемый гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, расположенные на платформе, два двигателя стабилизации, установленные по осям карданова подвеса, датчик курса, два блока формирования сигнала стабилизации и блок формирования управляющих и корректирующих сигналов, при этом ось чувствительности акселерометра параллельна главной оси...
Гірокомпас

Номер патенту: 19719
Опубліковано: 25.12.1997
Автори: Аврутов Вадим Вікторович, Старицький Лев Павлович, Збруцький Олександр Васильович, Дедок Ігорь Алєксєєвіч, Шемелін Анатолій Валентинович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
Гирокомпас, содержащий корпус с установленным на платформе в кардановом подвесе динамически настраиваемым гироскопом с двумя датчиками угла и двумя датчиками момента, датчик наклона платформы относительно ее горизонтальной оси вращения и термодатчик, расположенные на платформе, третий и четвертый датчики момента, установленные по осям карданова подвеса платформы и третий датчик угла, установленный на вертикальной оси карданова подвеса, два...
Гіростабілізатор

Номер патенту: 56098
Опубліковано: 15.04.2003
Автори: Голуб Олександр Григорович, Задорожний Юрій Івановіч, Задорожний Іван Степанович, Задорожний Валерій Іванович
МПК: G01C 21/10
Мітки: гіростабілізатор
Формула / Реферат:
1. Гіростабілізатор, що містить платформу, встановлений на платформі гіроблок з датчиком кута і датчиком моменту двоступеневого гіроскопа, послідовно сполучені підсилювач силової стабілізації, вхід якого сполучений з датчиком кута гіроблока, і двигун стабілізації, сполучений через редуктор з платформою, встановлений на платформі маятниковий акселерометр і послідовно сполучені блок форматування сигналу керування, вхід якого сполучений з...
Пристрій приведення гіростабілізованої платформи в горизонт
Номер патенту: 56111
Опубліковано: 15.04.2003
Автори: Задорожний Іван Степанович, Задорожний Валерій Іванович, Голуб Олександр Григорович, Задорожний Юрій Івановіч
МПК: G01C 21/10
Мітки: платформи, гіростабілізованої, приведення, горизонт, пристрій
Формула / Реферат:
Пристрій приведення гіростабілізованої платформи в горизонт, що містить встановлений на платформі чутливий елемент - маятниковий акселерометр, гіроблок з датчиком кута і датчиком моменту двоступеневого гіроскопа, послідовно з'єднані підсилювач силової стабілізації, вхід якого з'єднано з датчиком кута гіроблока, двигун стабілізації з'єднаний через редуктор з платформою, блок формування сигналу керування, вхід якого з'єднано з виходом...
Гірокомпас

Номер патенту: 24069
Опубліковано: 31.08.1998
Автори: Збруцький Олександр Васильович, Дєдок Ігорь Алєксєєвіч, Андрущик Володимир Петрович, Старицький Лев Павлович, Аврутов Вадим Вікторович, Шемелін Анатолій Валентинович
МПК: G01C 19/00
Мітки: гірокомпас
Формула / Реферат:
1. Гирокомпас, содержащий центральный прибор с трехстепенным гироскопом и индикатором горизонта, прибор управления и коррекции, таймер, первый элемент И и первый триггер, при этом выход β индикатора горизонта центрального прибора соединен с первым входом прибора управления и коррекции, второй вход которого соединен с первым выходом таймера, третий выход таймера соединен со вторым входом первого элемента И, четвертый выход таймера...
Попередній патент: Обертова плавильна піч
Наступний патент: Спосіб визначення вілтостійких сортів шовковиці
Випадковий патент: Пластина для остеосинтезу