Лічильник для інгалятора (варіанти), інгалятор та спосіб створення храпового колеса і механізму собачки для перетворення лінійного руху активації індикатора у поворотне переміщення дисплейного засобу

Формула / Реферат
1. Лічильник (20) для інгалятора, який має храпове колесо (230), механізм (190) з собачкою (210) для перетворення лінійного руху активації індикатора у поворотний рух дисплейного засобу (60), який відрізняється тим, що собачка (210) і храпове колесо (230) мають важільний засіб (500) для розчеплення собачки (210) з зубцем на храповому колесі (230) при впиранні собачки (210) у храпове колесо (230) у важільній точці (L), яка рухається по зазначеному зубцю в залежності від напрямку обертального руху храпового колеса (230).
2. Лічильник за п. 1, який відрізняється тим, що важільна точка (L) на храповому колесі (230) розміщена на наступному зубці.
3. Лічильник за п. 1 або 2, який відрізняється тим, що важільний засіб (500) сформований випуклою задньою поверхнею (510) на зубцях храпового колеса і взаємодіючою з нею нижньою спрофільованою поверхнею (530) собачки.
4. Лічильник за п. 1 або 2, який відрізняється тим, що важільний засіб (500) сформований прямою задньою поверхнею (540) на зубцях храпового колеса і взаємодіючим з нею виступом (550) на поверхні (530) собачки.
5. Лічильник (20) для інгалятора, який має храпове колесо (230), механізм (190) з собачкою (210) для перетворення лінійного руху активації індикатора у поворотне переміщення дисплейного засобу (60) і який має засіб (280) протидії зворотному обертанню типу фрикційного гальма, який відрізняється тим, що засіб (280) протидії зворотному обертанню складений з циліндричного елемента (300), який спирається на дві нахилені фрикційні поверхні (310), розміщені у V-подібний спосіб, пов'язаний з обертальним рухом храпового колеса і механізму (190) з собачкою і притиснений до фрикційних поверхонь (310) пружним елементом (320).
6. Лічильник за п. 5, який відрізняється тим, що фрикційні поверхні паралельні осі обертання циліндричного елемента.
7. Лічильник за п. 5 або 6, який відрізняється тим, що кут між фрикційними поверхнями менше 120°, переважно менше 110° і більш переважно менше 100°, і більше 60°, переважно більше 75° і більш переважно більше 80°.
8. Лічильник за будь-яким з пунктів 5-7, який відрізняється тим, що пружний елемент встановлений з можливістю дії на циліндричний елемент у напрямку по суті протилежно переміщенню собачки при просуванні дисплейного засобу.
9. Лічильник за будь-яким з пунктів 5-8, який відрізняється тим, що циліндричний елемент і храпове колесо розташовані на одному валу, і що засіб протидії зворотному обертанню є опорою для вала.
10. Лічильник за будь-яким з пунктів 5-9, який відрізняється тим, що вал додатково має черв'як для приводу дисплейного засобу і другу опору, і тим, що дисплейний засіб має поворотний засіб індикації з зубцями, які знаходяться у зачепленні з черв'яком.
11. Лічильник (20) для інгалятора, який має храпове колесо, механізм (190) з собачкою (210) для перетворення лінійного руху активації індикатора у поворотне переміщення дисплейного засобу (60), який відрізняється тим, що храпове колесо (230) має зубці з випуклою задньою поверхнею.
12. Лічильник за п. 11, який відрізняється тим, що кривина випуклої задньої поверхні є такою, що вибрана з умови мінімізації максимального моменту при русі повторного встановлення для храпового колеса і механізму (190) з собачкою шляхом підрахунків цього моменту, враховуючи наступні параметри: діаметр храпового колеса, кривину задньої поверхні зуба храпового колеса, коефіцієнт тертя між матеріалом храпового колеса і матеріалом собачки і показник пружності собачки.
13. Спосіб створення храпового колеса і механізму собачки для перетворення лінійного руху активації індикатора у поворотне переміщення дисплейного засобу (60), який включає: вибір діаметра, кількості зубців і матеріалу храпового колеса, вибір форми і матеріалу собачки, мінімізацію максимального моменту при русі повторного встановлення для храпового колеса і механізму собачки шляхом забезпечення зубців храпового колеса випуклою задньою поверхнею, який відрізняється тим, що забезпечення зубців храпового колеса випуклою задньою поверхнею включає визначення кривини задньої поверхні зубців храповика шляхом підрахунків моменту при русі повторного встановлення в залежності від наступних параметрів: діаметра храпового колеса, коефіцієнту тертя між матеріалом храпового колеса і матеріалом собачки і показника пружності собачки.
14. Лічильник (20) для інгалятора, який має: корпус лічильника (390), коромисло (200) з собачкою (210), яке поворотно встановлене у зазначеному корпусі для виконання руху коромисла у відповідь на лінійний рух активації, зворотну пружину (220) для повторного встановлення коромисла (200), храпове колесо (230), встановлене з можливістю зачеплення з собачкою для перетворення руху коромисла у періодичний обертальний рух вала (240), який просуває дисплейний засіб (60), причому вал додатково має засіб (280) протидії зворотному обертанню у вигляді фрикційного гальма, завантаженого пружиною, і черв'як (290), а дисплейний засіб має обертальний засіб (120) індикації з зубцями (330), які зачеплені з черв'яком, і стаціонарну шкалу (90).
15. Лічильник за п. 14, який відрізняється тим, що зворотна пружина і пружина фрикційного гальма утворені як єдине ціле.
16. Лічильник за п. 14 або 15, який відрізняється тим, що засіб протидії зворотному руху має циліндричний елемент, який спирається на дві нахилені поверхні, розміщені V-подібно, циліндричний елемент пов'язаний з обертальним рухом храпового колеса і механізму собачки і притиснутий до фрикційних поверхонь пружним елементом.
17. Лічильник за будь-яким з пунктів 14-16, який відрізняється тим, що вал, який має храпове колесо, циліндричний елемент фрикційного гальма і черв'як, виконаний як одне ціле.
18. Лічильник за будь-яким з пунктів 14-17, який відрізняється тим, що корпус лічильника закріплений на кінці контейнера (350) інгалятора, який протилежний кінцю, на якому розміщений клапан.
19. Лічильник за будь-яким з пунктів 14-18, який відрізняється тим, що корпус лічильника має отвір (400) для розташування виступу (410), який активує лічильник і який утворений як частина робочого корпусу (30) інгалятора, при цьому зазначений виступ при активації інгалятора входить у отвір (400) у корпусі лічильника, зачіплює коромисло і спонукає його до виконання зазначеного руху.
20. Інгалятор, що має контейнер і робочий корпус з засобом (370) для розміщення контейнера і активується відносним лінійним переміщенням контейнера і засобу (370), який відрізняється тим, що має лічильник за будь-яким з пунктів 1-19.
Текст
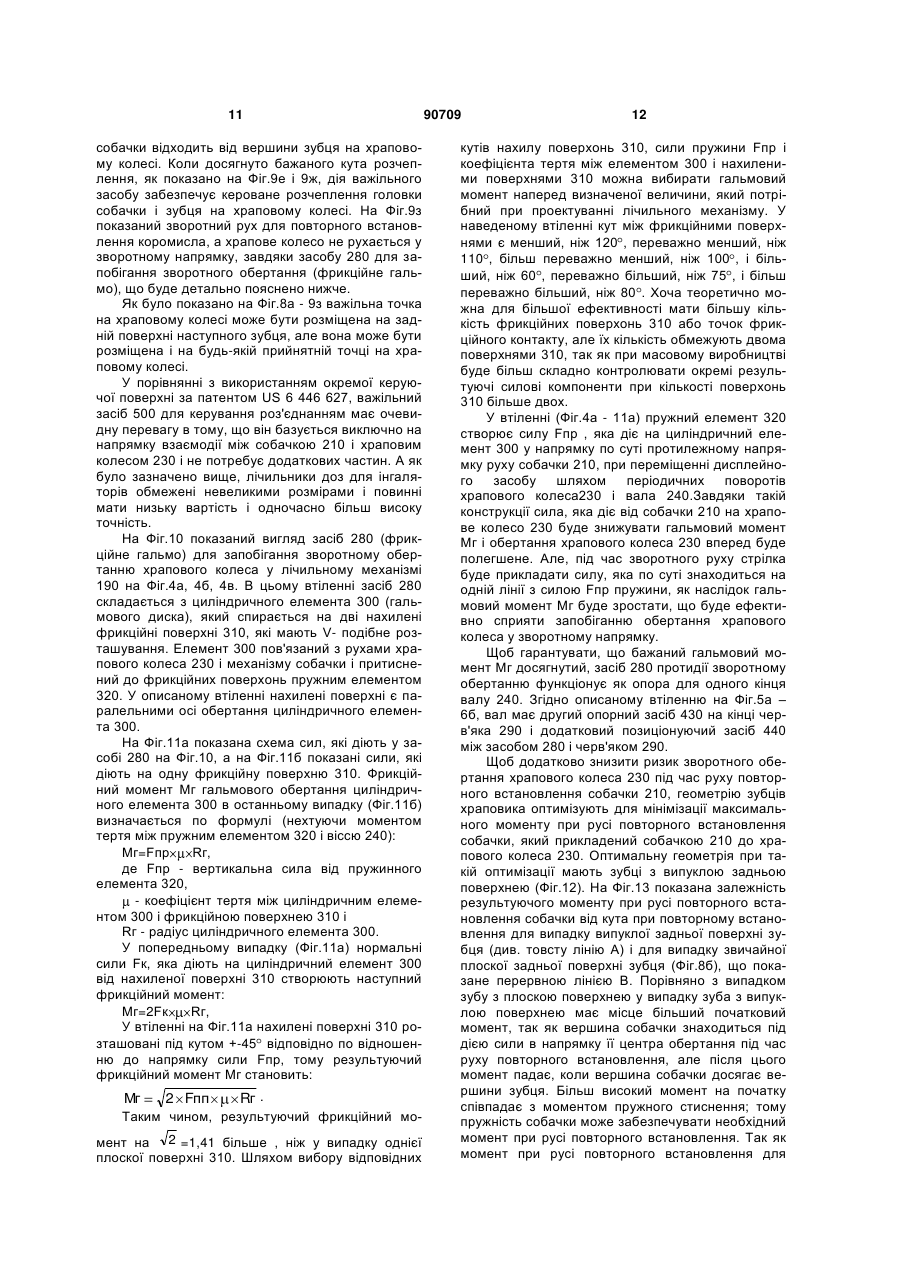
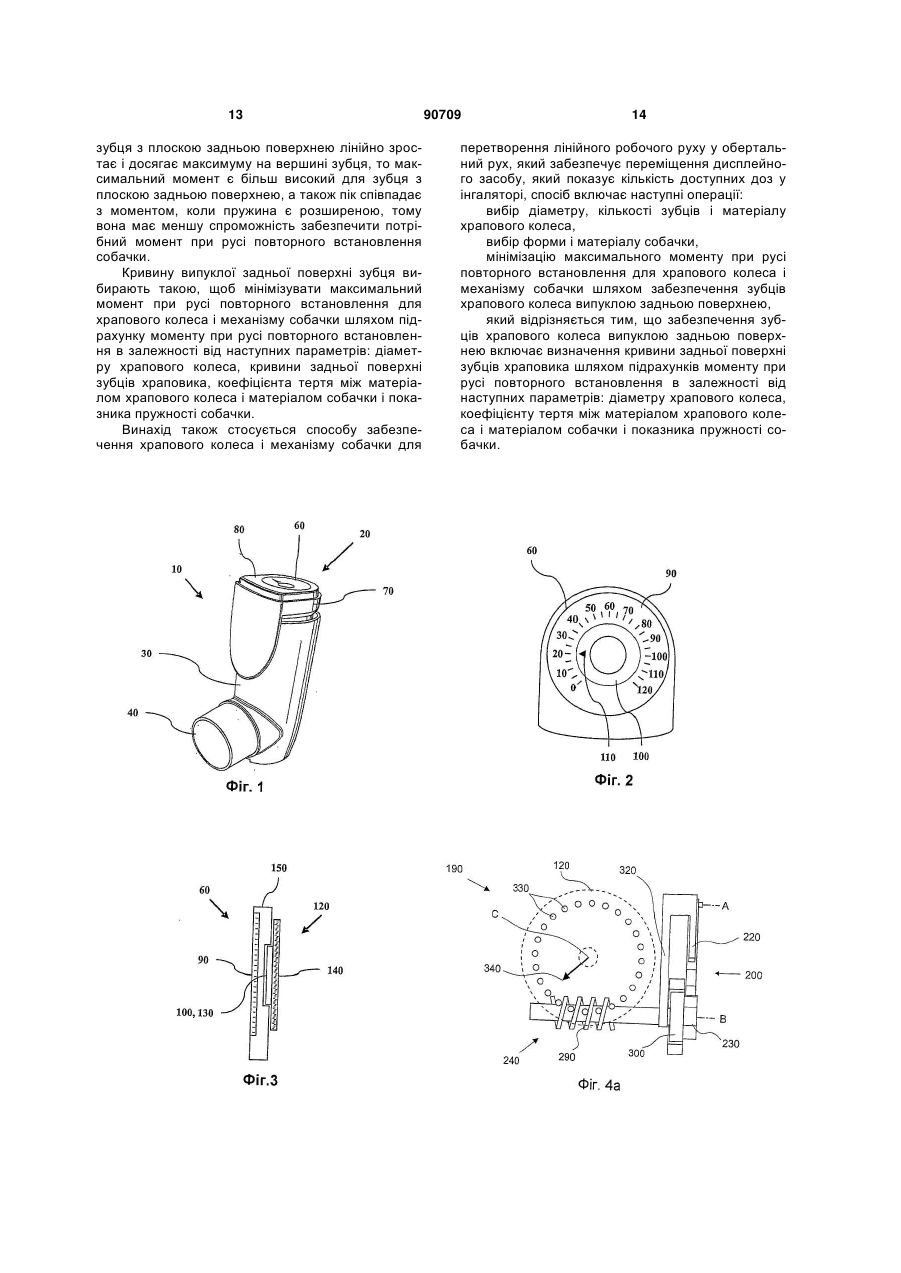
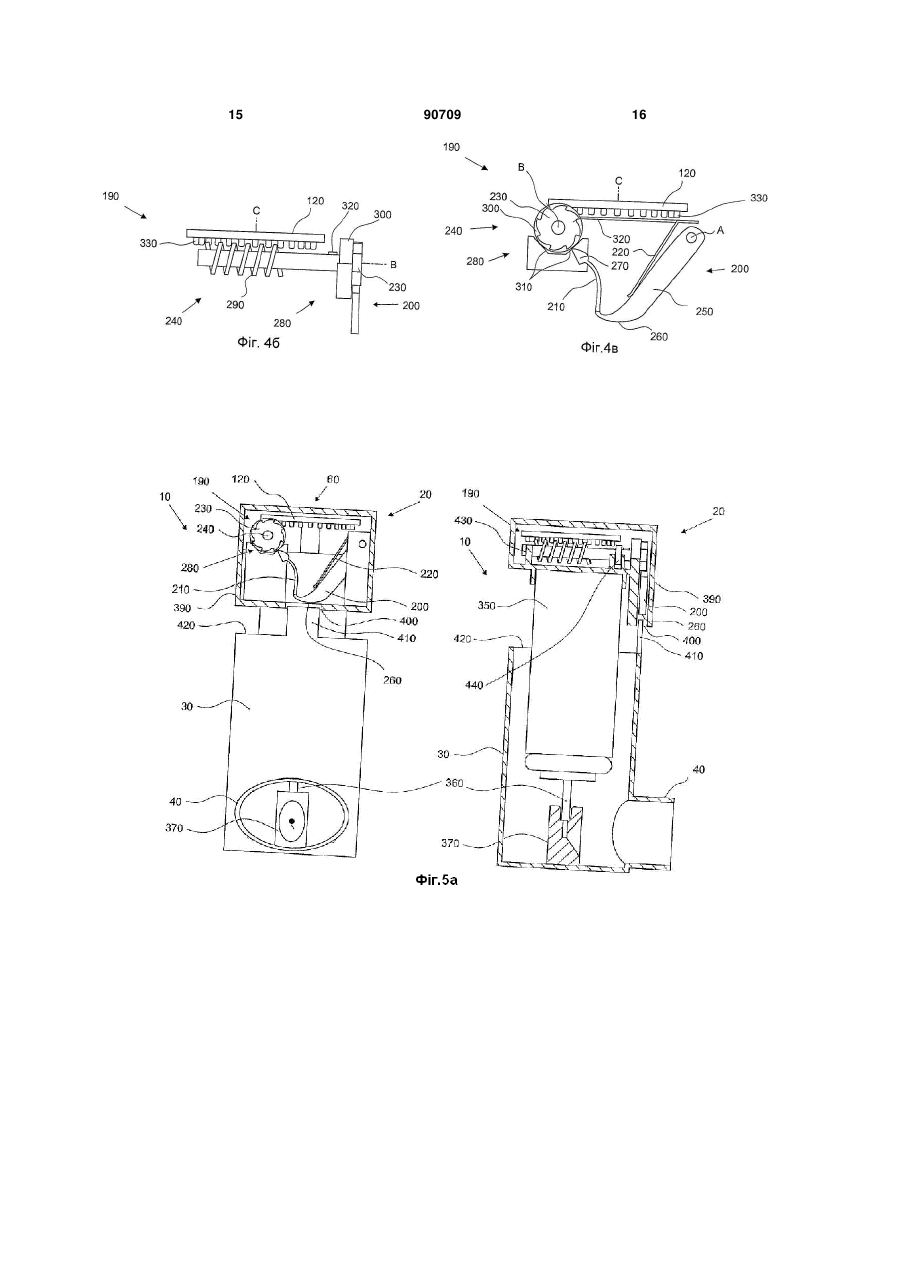
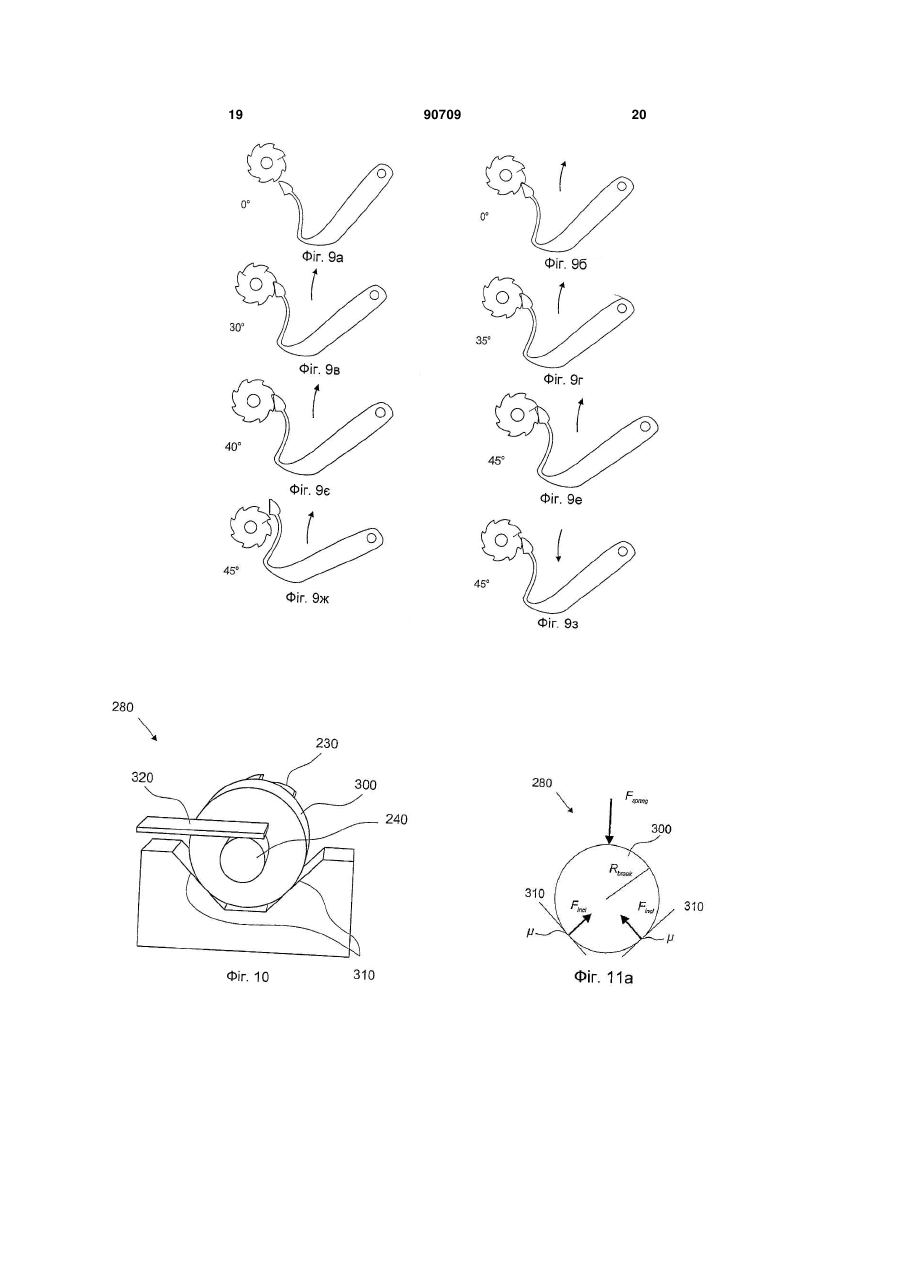
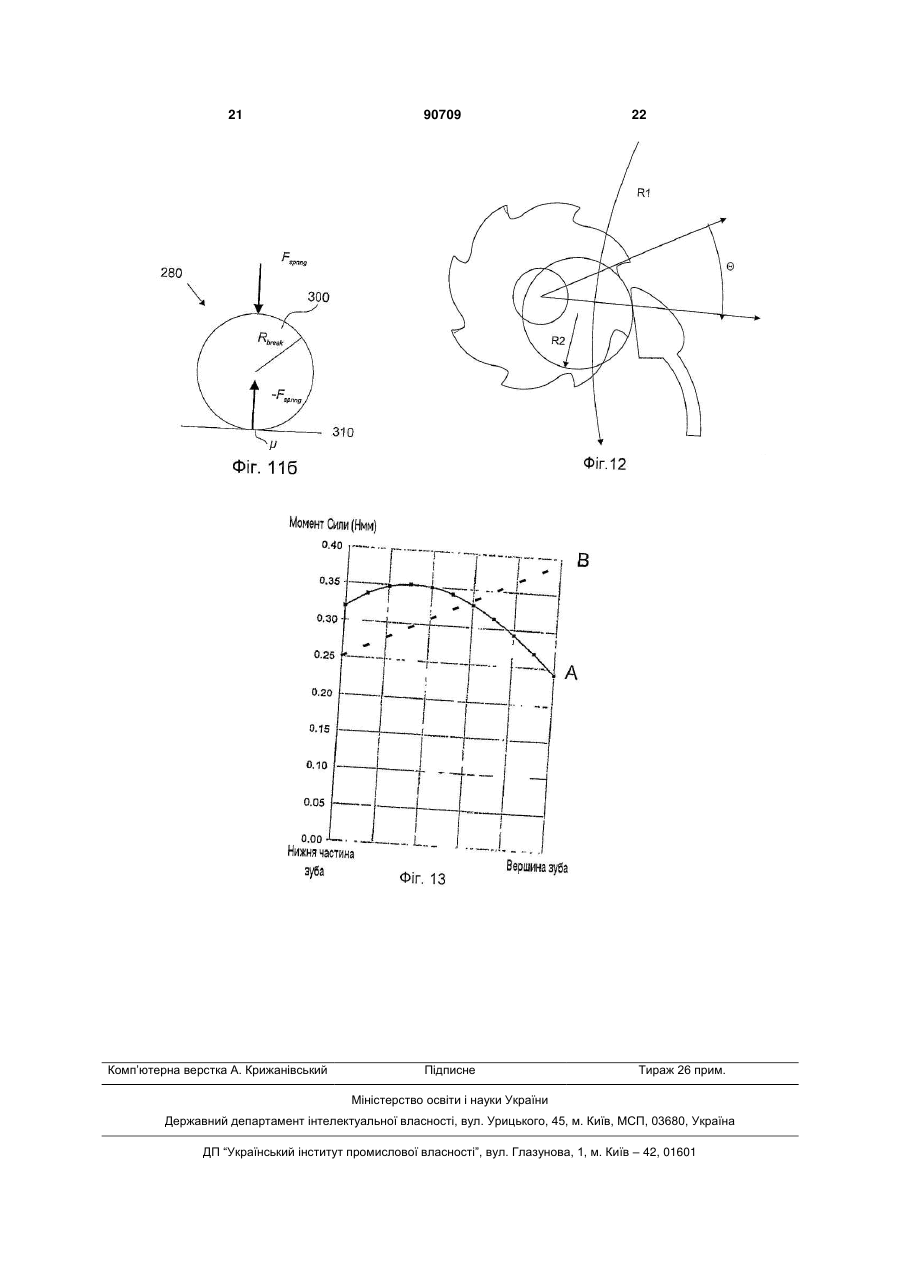
1. Лічильник (20) для інгалятора, який має храпове колесо (230), механізм (190) з собачкою (210) для перетворення лінійного руху активації індикатора у поворотний рух дисплейного засобу (60), який відрізняється тим, що собачка (210) і храпове колесо (230) мають важільний засіб (500) для розчеплення собачки (210) з зубцем на храповому колесі (230) при впиранні собачки (210) у храпове колесо (230) у важільній точці (L), яка рухається по зазначеному зубцю в залежності від напрямку обертального руху храпового колеса (230). 2. Лічильник за п. 1, який відрізняється тим, що важільна точка (L) на храповому колесі (230) розміщена на наступному зубці. 3. Лічильник за п. 1 або 2, який відрізняється тим, що важільний засіб (500) сформований випуклою задньою поверхнею (510) на зубцях храпового колеса і взаємодіючою з нею нижньою спрофільованою поверхнею (530) собачки. 4. Лічильник за п. 1 або 2, який відрізняється тим, що важільний засіб (500) сформований прямою задньою поверхнею (540) на зубцях храпового колеса і взаємодіючим з нею виступом (550) на поверхні (530) собачки. 5. Лічильник (20) для інгалятора, який має храпове колесо (230), механізм (190) з собачкою (210) для 2 (19) 1 3 90709 4 ту при русі повторного встановлення для храпового колеса і механізму (190) з собачкою шляхом підрахунків цього моменту, враховуючи наступні параметри: діаметр храпового колеса, кривину задньої поверхні зуба храпового колеса, коефіцієнт тертя між матеріалом храпового колеса і матеріалом собачки і показник пружності собачки. 13. Спосіб створення храпового колеса і механізму собачки для перетворення лінійного руху активації індикатора у поворотне переміщення дисплейного засобу (60), який включає: вибір діаметра, кількості зубців і матеріалу храпового колеса, вибір форми і матеріалу собачки, мінімізацію максимального моменту при русі повторного встановлення для храпового колеса і механізму собачки шляхом забезпечення зубців храпового колеса випуклою задньою поверхнею, який відрізняється тим, що забезпечення зубців храпового колеса випуклою задньою поверхнею включає визначення кривини задньої поверхні зубців храповика шляхом підрахунків моменту при русі повторного встановлення в залежності від наступних параметрів: діаметра храпового колеса, коефіцієнту тертя між матеріалом храпового колеса і матеріалом собачки і показника пружності собачки. 14. Лічильник (20) для інгалятора, який має: корпус лічильника (390), коромисло (200) з собачкою (210), яке поворотно встановлене у зазначеному корпусі для виконання руху коромисла у відповідь на лінійний рух активації, зворотну пружину (220) для повторного встановлення коромисла (200), храпове колесо (230), встановлене з можливістю зачеплення з собачкою для перетворення руху коромисла у періодичний обертальний рух вала (240), який просуває дисплейний засіб (60), причому вал додатково має засіб (280) протидії зворотному обертанню у вигляді фрикційного гальма, завантаженого пружиною, і черв'як (290), а дисплейний засіб має обертальний засіб (120) індикації з зубцями (330), які зачеплені з черв'яком, і стаціонарну шкалу (90). 15. Лічильник за п. 14, який відрізняється тим, що зворотна пружина і пружина фрикційного гальма утворені як єдине ціле. 16. Лічильник за п. 14 або 15, який відрізняється тим, що засіб протидії зворотному руху має циліндричний елемент, який спирається на дві нахилені поверхні, розміщені V-подібно, циліндричний елемент пов'язаний з обертальним рухом храпового колеса і механізму собачки і притиснутий до фрикційних поверхонь пружним елементом. 17. Лічильник за будь-яким з пунктів 14-16, який відрізняється тим, що вал, який має храпове колесо, циліндричний елемент фрикційного гальма і черв'як, виконаний як одне ціле. 18. Лічильник за будь-яким з пунктів 14-17, який відрізняється тим, що корпус лічильника закріплений на кінці контейнера (350) інгалятора, який протилежний кінцю, на якому розміщений клапан. 19. Лічильник за будь-яким з пунктів 14-18, який відрізняється тим, що корпус лічильника має отвір (400) для розташування виступу (410), який активує лічильник і який утворений як частина робочого корпусу (30) інгалятора, при цьому зазначений виступ при активації інгалятора входить у отвір (400) у корпусі лічильника, зачіплює коромисло і спонукає його до виконання зазначеного руху. 20. Інгалятор, що має контейнер і робочий корпус з засобом (370) для розміщення контейнера і активується відносним лінійним переміщенням контейнера і засобу (370), який відрізняється тим, що має лічильник за будь-яким з пунктів 1-19. Винахід стосується лічильників для інгаляторів, зокрема, лічильних механізмів для них. Багато видів медикаментів використовують у рідинній формі, такій як розчини або суспензії часток у вигляді аерозолі або емульсії, і пристосовують для оральної інгаляції пацієнтом. Як один з прикладів, контейнер може вміщувати медикамент проти астми, такий як флутиказон пропіонат. Для введення медикаменту пацієнту контейнер працює у з'єднанні з активатором як система взагалі відома як система виміру дози інгалятору (ВДІ). Активатор включає корпус, який має відкритий кінець для наповнення контейнера і відкритий мундштук. Елемент розпилення розташований всередині корпусу і він має клапанну головку і приймальний канал, який з'єднаний з отвором розпилення. Цей отвір направлений у мундштук. Щоб отримати відповідну виміряну дозу медикаменту з контейнеру, пацієнт вставляє контейнер у активатор крізь кінець для вставлення контейнера поки клапанна головка не увійде у приймальний канал елемента розпилення. При такому встановленні контейнера протилежний кінець контейнера звичайно простягнений на деяку величину за межі корпусу активатора. Потім пацієнт розміщує мундштук у його (її) рот і натискає донизу на кінець контейнера, який виглядає. Така дія спричиняє зміщення контейнера донизу відносно клапанної головки, яка в свою чергу відкриває клапан. В залежності від конструкції клапана, елемента розпилення і внутрішнього простору між контейнером і зовнішнім повітрям, коротким упорскуванням точно виміряного, розпиленого медикаменту відбувається введення у пацієнта. Такий контейнер заповнюють наперед заданою кількістю активної речовини, а саме, медикаментом. Тобто, номінально контейнер може доставляти наперед визначену кількість доз медикаменту перед його спорожненням. Щоб було видно кількість залишених доз у такому інгаляторі, він має лічильник, який показує кількість залишеного медикаменту у контейнері. Таким чином, лічильник дає можливість визначати, коли потрібно заміняти інгалятор або контейнер. Дисплей "поточного стану" може давати покази або в абсолютних одиницях, наприклад, показувати робочу кіль 5 кість доз, що залишилися, у вигляді фігур, або у відносних одиницях, наприклад, у вигляді градієнту переходу від одного кольору до іншого. Незалежно від типу дисплею, дуже важливо, щоб лічильний механізм не показував перебільшену кількість використаних доз, а особливо недолічував використані дози. Останнє може призвести до ситуації, коли користувач вважає, що все ще є активні дози у порожньому інгаляторі, що у найгіршому випадку може привести до летального наслідку. І навпаки, перебільшення кількості використаних доз, призводить до того, що ще не порожні інгалятори потрібно буде розряджати, тобто інгалятори, які все ще вміщують дози, які можливо використати, не будуть використовуватися пацієнтом, тобто користувач не буде отримувати повністю продукт, будуть зростати витрати пацієнта, а також кількість відходів, і ліки, які залишені у інгаляторі, можуть попасти у навколишнє середовище, якщо такий інгалятор не буде коректно ліквідований. Вимоги до інгаляторів включають мінімізацію помилок, пов'язаних з відліком доз. Як було пояснено у заявці SE 0401773-7 момент відліку повинен відбуватися як можна раніше перед моментом вприскування медикаменту, щоб мінімізувати ризик недолічування доз. Але, це призводить до того, що робочий рух (рух активації інгалятора) повинен продовжуватися на деяку відстань після точки відліку, щоб досягти активації інгалятора. Фактично, вимірний клапан дози інгалятора дозволяє відносно великий безперервний рух після моменту вприскування. Тому, будь-який лічильник повинен, на додаток до створення одного відліку одразу перед моментом виприскування, також мати можливість пристосовуватися до зазначеного безперервного робочого руху, не виконуючи подвійний відлік. У багатьох дозуючих контейнерах відносний робочий рух перетворюється у періодичний обертальний рух за допомогою храпового колеса і механізму собачки. Щоб такі механізми були точними і робили точно один відлік дози при кожному робочому русі, обертання храпового колеса повинно бути керованим для забезпечення точних періодичних поворотів. В основному є два типи засобів для досягнення такого керованого обертання: - Періодично діючий засіб для запобіганні зворотного обертання у вигляді, наприклад зафіксованої собачки, яка забезпечує неможливість зворотного повороту при визначених кутах робочого повороту і яка активується при повороті храпового колеса за межі цього визначеного кута. Після цього храпове колесо обертають у протилежному напрямку під час переміщення для повторного встановлення собачки, поки не буде досягнуто визначеного кута і подальший рух зупиняється. - Не кроковий засіб для запобігання зворотного обертання і керованого входження в зачеплення і розчеплення між собачкою і храповим колесом. Сили тертя можуть забезпечити можливість відгинання собачки радіально усередину в напрямку осі обертання храпового колеса у точці розчеплення, внаслідок чого результуючий кут буде залежати від таких параметрів як: коефіцієнт тертя між зубом храпового колеса і собачкою, швидкість робо 90709 6 чого руху активації і т.п., якщо процесом розчеплення не керувати. Обидві системи мають певні переваги, але переважним для проектування лічильника доз є останній фрикційний тип, так як він зменшує вплив допусків збірки і тому забезпечує обмеження зміни точки відліку. У патенті US 4817822 описаний аерозольний розпилювач описаного вище типу, який має пристрій індикації доз, який у першому втіленні прикріплений до кінця виступаючої частини аерозольного контейнера. Робочим механізмом лічильника доз є храпове колесо і собачка (приводний важіль), які розміщені всередині корпуса, який простягнений від кінця аерозольного контейнера вздовж зовнішньої поверхні трубчастого корпусу, і цей механізм лічильника доз активується відносним переміщенням між робочим корпусом і корпусом лічильника під час активації інгалятора. Щоб пристосуватися до надлишкового робочого переміщення активації, храпове колесо і механізм собачки мають засіб обмеження переміщення, який дозволяє собачці переміщатися тільки на наперед визначену відстань під час робочого переміщення, і робоче переміщення передається собачці через засіб гнучкого зв'язку, який дозволяє собачці переміститися до кінця перед початком робочого переміщення. У патенті US 6 446 627 описаний лічильник доз для інгалятору з вимірними дозами, який має активуючий засіб, приводний засіб для приведення в дію шестерні шагового повороту у відповідь на зміщення зазначеного активуючого засобу, причому, зазначена шестерня повороту має декілька храпових зубців по її периферії. Засіб слугує для попередження реверсного обертання поворотної шестерні, причому, зазначений засіб переважно є засобом без крокового обмеження руху у вигляді фрикційної муфти. Гнучка стрічка має видиму шкалу цілих чисел на своїй поверхні, які показують кількість доз медикаменту, які залишені у інгаляторі. Стрічка індексує одне ціле число у відповідь на кожний крок руху поворотної шестерні. Окрема контрольна поверхня регулює положення зачеплення і розчеплення між приводним засобом і поворотною шестернею, внаслідок чого кут обертання поворотної шестерні є контрольованим при кожній активації інгалятора. Спеціального обговорення потребує те, що контрольна поверхня слугує для погашення природної тенденції гнучкого приводного засобу гнутися радіально в напрямку осі обертання храпового колеса з зубцями, і спонукає приводний засіб до розчеплення з зубом храповика у фіксованій точці. Але, запропонований лічильник доз є відносно складним і його складно збирати. З гігієнічних причин бажано увесь інгалятор ліквідовувати і ніякі частини повторно не використовувати. Тому, інгалятор, який має лічильний механізм повинен бути недорогим у виробництві. Щоб лічильник був недорогим він повинен складатися з декількох частин і бути простим для збирання. Так як інгалятори мають обмежені розміри, то лічильник повинен бути малим, що зокрема зменшує читабельність дисплею. Це зокрема стосуєть 7 ся дисплеїв, які показують кількість залишених доз у абсолютних цифрах, так як фігури повинні бути малих розмірів для їх розміщення на інгаляторі. Метою винаходу є створення нового інгалятора і лічильника інгалятора для подолання одного або більше недоліків існуючих інгаляторів і лічильників. Це досягають інгалятором і лічильником, які наведені у незалежних пунктах формули винаходу. Однією з переваг такого лічильника є те, що він має великий дисплей, з якого можна легко зчитувати, і точний механізм, який має шість окремих частин, які легко збирати, внаслідок чого лічильник є недорогим у виробництві. Інші різні ознаки втілень винаходу визначені у залежних пунктах формули винаходу. Далі винахід буде описаний детально з посиланнями на креслення де на: Фіг.1 показаний перспективний вигляд інгалятора з лічильником за винаходом; Фіг.2 показаний дисплей для лічильника інгалятора за винаходом; Фіг.3 показаний поперечний переріз дисплею на Фіг.2; Фіг.4а, 4б, 4в показаний приклад лічильного механізму для інгалятора за винаходом; Фіг.5а і 5б показаний лічильний механізм на Фіг. 4а, 4б, 4в, у інгаляторі, частково у перерізі; Фіг.6а і 6б показані інгалятор і лічильник на Фіг.5а і 5б під час активації; Фіг.7 показана базова геометрія собачки і храповика лічильного механізму на Фіг.4а, 4б, 4в; Фіг.8а і 8б показана базова геометрія двох можливих варіантів собачки і храповика з важільним засобом за винаходом; Фіг.9а, 9б, 9в, 9г, 9д, 9е, 9ж, 9з показане зачеплення і розчеплення собачки і храповика. Фіг.10 показаний вигляд гальма зворотного обертання у лічильнику на Фіг.4а, 4б, 4в, Фіг.11а і 12б показана схема дії сил у гальмі зворотного обертання на Фіг.9; Фіг.12 показана базова геометрія храпового колеса у лічильному механізмі на Фіг.4а, 4б, 4в; Фіг.13 наведений графік, який показує зміну моменту сили при повторному встановлення, який створює собачка дією на храпове колесо на Фіг.12. На Фіг.1 показаний приклад інгалятора 10 з лічильником 20 за винаходом. Інгалятор має робочий корпус 30 з мундштуком 40 крізь який медикамент подається до пацієнта, і збірку контейнерлічильник. В цьому втіленні лічильник 20 закріплений на кінці контейнеру (не показаний), який розміщений в корпусі 30. Інгалятор 10 активується при натисненні збірки контейнер-лічильник відносно корпуса 30. Лічильник 20 пристосований відлічувати кожну активацію інгалятора 10 і показувати на дисплеї умови активації за допомогою дисплейного засобу 60. Лічильник 20 в може бути розташований як частина корпусу 30, або бути прикріплений з можливістю відкріплення до корпусу 30, наприклад на передньому або задньому боці його. За винаходом, лічильник 20 знаходиться на базовій частині контейнера інгалятора. Лічильник 20 прикріплений до контейнера шляхом відповідної збірки, і він може бути прикріплений до контей 90709 8 нера у будь-якій з декількох точок вздовж кінця контейнера, який є протилежним клапану, тобто на частині контейнера, протилежній головці клапана, в межах від віддаленої крайки лічильника до її внутрішньої бази, що дає можливість зміни положення у зв'язку з варіацією довжини контейнера, пов'язаної з допусками виготовлення. Тобто, лічильник може бути прикріплений у будь-якому місці на базі контейнера. У тексті ми будемо посилатися на точку вприскування, яка відповідає величині переміщення контейнера відносно робочого корпусу інгалятора, яке є необхідним для забезпечення введення дози медикаменту, і на точку відліку, яка відповідає величині переміщення лічильника відносно робочого корпусу інгалятора, яке є необхідним для спрацьовування лічильника 20 для відліку однієї дози. Неповний відлік доз не рекомендується, маючи на увазі ризик, того що користувач вважає, що медикамент ще залишається у контейнері інгалятора, коли реально він є порожнім, тому точку відліку встановлюють так, щоб наперед визначена величина переміщення для неї була менше, ніж переміщення для точки вприскування, цим ефективно запобігають випадку вприскування медикаменту без його відліку. Лічильник 20 має корпус 70 лічильника, лічильний механізм (буде описаний детально нижче) і дисплейний засіб 60. У втіленні на Фіг.1 дисплейний засіб 60 знаходиться на верхній поверхні 80 корпусу 70. У цьому втіленні верхня поверхня 80 корпусу 70 виконана як прозора відлита частина 150, яка покриває корпус 70. В описаному втіленні поверхня 80 крім того використовується як робоча поверхня для активації інгалятора 10, тобто для натиснення на збірку контейнер-лічильник. Так як поверхня 80 лічильника використовується як робоча поверхня, то вона повинна бути жорсткою і зносостійкою, так як на неї будуть діяти натискні сили і відбуватися зношення під час роботи інгалятора 10. На Фіг.2 показаний вигляд зверху на лічильник 20 і приклад дисплейного засобу 60 за винаходом. Дисплейний засіб 60 має нерухому частину 90 і рухому частину 100. Нерухома частина 90 оточує рухому частину 100, яка слугує поворотним елементом з покажчиком 110. Нерухома частина 90 є зоною кругового градуювання показників кількості доз, які залишені у контейнері, і показує кутове положенням покажчика 110, в такий спосіб забезпечуючи робочий відлік залишених доз. При такій конструкції можливо досягти переваг порівняльної і точної оціночної індикації залишеної кількості доз. На Фіг.3 показані у перерізі основні частини дисплейного засобу 60 лічильника на Фіг.2. Рухома частина 100 виконана у вигляді колеса 120 з покажчиком, обертання якого контролюється лічильним механізмом (буде описаний нижче). Колесо 120 має дисплейну частину 130 з покажчиком 110 і зачіпну частину 140 лічильного механізму у вигляді колеса з зубцями. На Фіг.4а, 4б, 4в показаний приклад лічильного механізму 190 для лічильника за винаходом з рухомим корпусом 70. Лічильний механізм має коромисло 200, зворотну пружину 220, вал 240 з 9 храповим колесом 230, і обертальне колесо 120 з покажчиком. Коромисло 200 має собачку 210, яка шарнірно закріплена на корпусі у точці А і яка зміщується донизу за допомогою зворотної пружини 220. Коромисло 200 має жорстку частину 250, яка простягнена від точки А до його найнижчої точці нижньої частини 260 коромисла, яка межує з дном корпусу, де відбувається контакт з виступом на робочому корпусі (як це буде показане далі), і гнучку собачку 210 з головкою 270, яка зачіплює і приводить в дію храпове колесо 230 для періодичних поворотних переміщень при робочому русі активації інгалятора. Вал 240 має, крім храпового колеса, засіб 280 для запобігання зворотного обертання і черв'як 290 (всі мають одну вісь), який має опору в корпусі (не показана) для обертання навколо осі В. Засобом 280 для запобігання зворотного обертання є пружно завантажене фрикційне гальмо, яке має циліндричний елемент (гальмовий диск) 300, який притиснений до двох нахилених фрикційних поверхонь 310 пружним елементом (гальмовою пружиною) 320. В цьому втіленні зворотна пружина 220 і пружний елемент 320 виконані як єдина збірка з двома окремими відгалуженнями, які простягнені від загальної бази для закріплення на корпусі (не показане). Засіб 280 буде більш детально описаний нижче. Колесо 120 з покажчиком встановлено з можливістю обертання навколо осі С, воно має периферійні зубці 330, які зачеплені з черв'яком 290 і покажчик 340, який показує відлік доз на стаціонарній шкалі (не показана на Фіг.4а, 4б, 4в). Таким чином, колесо 120 приводиться у обертання навколо осі С черв'яком 290 на валу 240. На Фіг.5а і 5б показаний лічильний механізм 190 на Фіг.4а, 4б, 4в у інгаляторі 10, частково у перерізі. Інгалятор 10 має робочий корпус 30, в якому знаходиться контейнер 350, в якому знаходиться медикамент. Медикамент доставляють до користувача крізь клапанну головку 360, яка знаходиться на одному кінці контейнера 350. Медикамент інгалюється користувачу крізь мундштук 40, який є частиною робочого корпуса 30. Мундштук 40 сполучений з головкою 360 через елемент 370 для розміщення головки, який отримує медикамент для інгаляції. Крім того, на кінці контейнера 350, який є протилежним головці 360 клапану, розташований лічильник 20 доз. В цьому втіленні лічильник 20 переважно постійно прикріплений до контейнера 350, щоб уникнути того, що лічильник 20 знімають з одного контейнера 350 і прикріпляють до іншого контейнера 350, який має інший рівень медикаменту. Контейнер 350 з прикріпленим лічильником 20 доз надалі вважається як збірка інгалятору. Якщо дозу медикаменту потрібно ввести користувачу, то на збірку інгалятора натискають донизу так, щоб головку 360 перевести у положення, коли вона забезпечує доставку дози медикаменту, або іншими словами виконується виприскування. Це виконується при роботі багатьох відомих інгаляторів і тому не буде більш детально описане в цьому описі. 90709 10 Лічильник має корпус 390 і лічильний механізм 190 на Фіг.4а, 4б, 4в. Корпус на донизу направленій поверхні має отвір 400, який пристосоване для відповідного розміщення виступу 410, який знаходиться на верхній крайці 420 робочого корпусу. Коли інгалятор 10 натискають для виприскування, як це показано на Фіг.6а і 6б, виступ 410 проходить крізь отвір 400 у корпусі 390 і натискає на нижню частину 260 коромисла 200, що приводить лічильний механізм 190 у дію. На Фіг.7 показана базова геометрія коромисла 200 і храпового колеса 230 лічильного механізму 190 на Фіг.4а, 4б, 4в. В ідеалі, головка 270 собачки переміщується по колу радіусом R під час руху коромисла, а зачеплення і розчеплення з храповим колесом 230 походить на зачеплення двох зубчастих коліс. Але, щоб собачка 210 обертала храпове колесо 230 на бажаний кут, наприклад 45 , храпове колесо 230 розміщене ближче, ніж ідеальна відстань зачеплення, тому при русі головки 270 собачки має місце зменшення радіусу переміщення після зачеплення з храповим колесом 230. В такому випадку головка 270 собачки зачіплює храпове колесо 230 на деякий кут раніше, ніж при ідеальній відстані зачеплення і, навпаки, розчеплення відбувається на деякий кут пізніше. Щоб механізм можна було повторно встановлювати, коромисло зміщують у напрямку "протилежному приводному ", і це забезпечується тим, що собачка 210 є гнучкою у радіальному напрямку. Собачка 210 є по суті жорсткою у напрямку по колу. Щоб подолати можливість собачки 210 вигинатися радіально в напрямку осі обертання храпового колеса у точці розчеплення, ця точка ефективно контролюється тим, що собачка і храпове колесо мають важільний засіб для забезпечення розчеплення собачки і зубця на храповому колесі. Цей важільний засіб сконструйований так, що забезпечує примикання собачки і храпового колеса у важільній точці, яка переміщується по зубу в залежності від напрямку обертального руху. На Фіг.8а і 8б показані приклади двох можливих втілень важільного засобу 500 для керування відчепленням собачки 210 від храпового колеса 230. Щоб засіб 500 функціонував як керуючий роз'єднуючий засіб, його необхідно спроектувати так, щоб точка L важеля була розміщена на прийнятній відстані D від вершини головки собачки, в залежності від бажаного кута розчеплення і проектних характеристик і матеріалів собачки 210 і храпового колеса 230. У втіленні на Фіг.8а важільний засіб 500 утворений випуклою задньою поверхнею 510 зубців 520 храпового колеса і поверхнею 530 нижнього профілю собачки лічильника. У втіленні на Фіг.8б засіб 500 утворений плоскою задньою по верхньою 540 зубців 520 храпового колеса і виступом 550 на поверхні 530 собачки лічильника. На Фіг.9а - 9з показана послідовність зачеплень і розчеплень храпового колеса і механізму 190 собачки одного з втілень за винаходом. На Фіг.9г можна бачити , собачка і зубці храпового колеса утворені так, що важільна точка примикання встановлена на куті, який передує бажаному куту розчеплення. А на Фіг.9д можна бачити, що сили від важеля діють так, що вершина головки 11 собачки відходить від вершини зубця на храповому колесі. Коли досягнуто бажаного кута розчеплення, як показано на Фіг.9е і 9ж, дія важільного засобу забезпечує кероване розчеплення головки собачки і зубця на храповому колесі. На Фіг.9з показаний зворотний рух для повторного встановлення коромисла, а храпове колесо не рухається у зворотному напрямку, завдяки засобу 280 для запобігання зворотного обертання (фрикційне гальмо), що буде детально пояснено нижче. Як було показано на Фіг.8а - 9з важільна точка на храповому колесі може бути розміщена на задній поверхні наступного зубця, але вона може бути розміщена і на будь-якій прийнятній точці на храповому колесі. У порівнянні з використанням окремої керуючої поверхні за патентом US 6 446 627, важільний засіб 500 для керування роз'єднанням має очевидну перевагу в тому, що він базується виключно на напрямку взаємодії між собачкою 210 і храповим колесом 230 і не потребує додаткових частин. А як було зазначено вище, лічильники доз для інгаляторів обмежені невеликими розмірами і повинні мати низьку вартість і одночасно більш високу точність. На Фіг.10 показаний вигляд засіб 280 (фрикційне гальмо) для запобігання зворотному обертанню храпового колеса у лічильному механізмі 190 на Фіг.4а, 4б, 4в. В цьому втіленні засіб 280 складається з циліндричного елемента 300 (гальмового диска), який спирається на дві нахилені фрикційні поверхні 310, які мають V- подібне розташування. Елемент 300 пов'язаний з рухами храпового колеса 230 і механізму собачки і притиснений до фрикційних поверхонь пружним елементом 320. У описаному втіленні нахилені поверхні є паралельними осі обертання циліндричного елемента 300. На Фіг.11а показана схема сил, які діють у засобі 280 на Фіг.10, а на Фіг.11б показані сили, які діють на одну фрикційну поверхню 310. Фрикційний момент Мг гальмового обертання циліндричного елемента 300 в останньому випадку (Фіг.11б) визначається по формулі (нехтуючи моментом тертя між пружним елементом 320 і віссю 240): Мг=Fпр Rг, де Fпр - вертикальна сила від пружинного елемента 320, - коефіцієнт тертя між циліндричним елементом 300 і фрикційною поверхнею 310 і Rг - радіус циліндричного елемента 300. У попередньому випадку (Фіг.11а) нормальні сили Fк, яка діють на циліндричний елемент 300 від нахиленої поверхні 310 створюють наступний фрикційний момент: Мг=2Fк Rг, У втіленні на Фіг.11а нахилені поверхні 310 розташовані під кутом +-45 відповідно по відношенню до напрямку сили Fпр, тому результуючий фрикційний момент Мг становить: Мг 2 Fпп Rг . Таким чином, результуючий фрикційний момент на 2 =1,41 більше , ніж у випадку однієї плоскої поверхні 310. Шляхом вибору відповідних 90709 12 кутів нахилу поверхонь 310, сили пружини Fпр і коефіцієнта тертя між елементом 300 і нахиленими поверхнями 310 можна вибирати гальмовий момент наперед визначеної величини, який потрібний при проектуванні лічильного механізму. У наведеному втіленні кут між фрикційними поверхнями є менший, ніж 120 , переважно менший, ніж 110 , більш переважно менший, ніж 100 , і більший, ніж 60 , переважно більший, ніж 75 , і більш переважно більший, ніж 80 . Хоча теоретично можна для більшої ефективності мати більшу кількість фрикційних поверхонь 310 або точок фрикційного контакту, але їх кількість обмежують двома поверхнями 310, так як при масовому виробництві буде більш складно контролювати окремі результуючі силові компоненти при кількості поверхонь 310 більше двох. У втіленні (Фіг.4а - 11а) пружний елемент 320 створює силу Fпр , яка діє на циліндричний елемент 300 у напрямку по суті протилежному напрямку руху собачки 210, при переміщенні дисплейного засобу шляхом періодичних поворотів храпового колеса230 і вала 240.Завдяки такій конструкції сила, яка діє від собачки 210 на храпове колесо 230 буде знижувати гальмовий момент Мг і обертання храпового колеса 230 вперед буде полегшене. Але, під час зворотного руху стрілка буде прикладати силу, яка по суті знаходиться на одній лінії з силою Fпр пружини, як наслідок гальмовий момент Мг буде зростати, що буде ефективно сприяти запобіганню обертання храпового колеса у зворотному напрямку. Щоб гарантувати, що бажаний гальмовий момент Мг досягнутий, засіб 280 протидії зворотному обертанню функціонує як опора для одного кінця валу 240. Згідно описаному втіленню на Фіг.5а – 6б, вал має другий опорний засіб 430 на кінці черв'яка 290 і додатковий позиціонуючий засіб 440 між засобом 280 і черв'яком 290. Щоб додатково знизити ризик зворотного обертання храпового колеса 230 під час руху повторного встановлення собачки 210, геометрію зубців храповика оптимізують для мінімізації максимального моменту при русі повторного встановлення собачки, який прикладений собачкою 210 до храпового колеса 230. Оптимальну геометрія при такій оптимізації мають зубці з випуклою задньою поверхнею (Фіг.12). На Фіг.13 показана залежність результуючого моменту при русі повторного встановлення собачки від кута при повторному встановлення для випадку випуклої задньої поверхні зубця (див. товсту лінію А) і для випадку звичайної плоскої задньої поверхні зубця (Фіг.8б), що показане перервною лінією В. Порівняно з випадком зубу з плоскою поверхнею у випадку зуба з випуклою поверхнею має місце більший початковий момент, так як вершина собачки знаходиться під дією сили в напрямку її центра обертання під час руху повторного встановлення, але після цього момент падає, коли вершина собачки досягає вершини зубця. Більш високий момент на початку співпадає з моментом пружного стиснення; тому пружність собачки може забезпечувати необхідний момент при русі повторного встановлення. Так як момент при русі повторного встановлення для 13 зубця з плоскою задньою поверхнею лінійно зростає і досягає максимуму на вершині зубця, то максимальний момент є більш високий для зубця з плоскою задньою поверхнею, а також пік співпадає з моментом, коли пружина є розширеною, тому вона має меншу спроможність забезпечити потрібний момент при русі повторного встановлення собачки. Кривину випуклої задньої поверхні зубця вибирають такою, щоб мінімізувати максимальний момент при русі повторного встановлення для храпового колеса і механізму собачки шляхом підрахунку моменту при русі повторного встановлення в залежності від наступних параметрів: діаметру храпового колеса, кривини задньої поверхні зубців храповика, коефіцієнта тертя між матеріалом храпового колеса і матеріалом собачки і показника пружності собачки. Винахід також стосується способу забезпечення храпового колеса і механізму собачки для 90709 14 перетворення лінійного робочого руху у обертальний рух, який забезпечує переміщення дисплейного засобу, який показує кількість доступних доз у інгаляторі, спосіб включає наступні операції: вибір діаметру, кількості зубців і матеріалу храпового колеса, вибір форми і матеріалу собачки, мінімізацію максимального моменту при русі повторного встановлення для храпового колеса і механізму собачки шляхом забезпечення зубців храпового колеса випуклою задньою поверхнею, який відрізняється тим, що забезпечення зубців храпового колеса випуклою задньою поверхнею включає визначення кривини задньої поверхні зубців храповика шляхом підрахунків моменту при русі повторного встановлення в залежності від наступних параметрів: діаметру храпового колеса, коефіцієнту тертя між матеріалом храпового колеса і матеріалом собачки і показника пружності собачки. 15 90709 16 17 90709 18 19 90709 20 21 Комп’ютерна верстка А. Крижанівський 90709 Підписне 22 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCounter for inhaler (options), inhaler and method to produce a notched wheel and duckling dog mechanism to transform linear motion of indicator activation to rotating tranform of a display means
Автори англійськоюBowman Nick, Bradsow Douglas, Serbi Lenkart
Назва патенту російськоюСчетчик для ингалятора (варианты), ингалятор и способ создания храпового колеса и механизма собачки для преобразования линейного движения активации индикатора в поворотное перемещение дисплейного средства
Автори російськоюБаумен Ник, Бредшоу Дуглас, Серби Ленкарт
МПК / Мітки
МПК: F16D 49/00, A61M 15/00, G06M 1/00
Мітки: механізму, собачки, перетворення, спосіб, лічильник, руху, поворотне, храпового, індикатора, засобу, колеса, дисплейного, лінійного, інгалятора, створення, варіанти, активації, переміщення, інгалятор
Код посилання
<a href="https://ua.patents.su/11-90709-lichilnik-dlya-ingalyatora-varianti-ingalyator-ta-sposib-stvorennya-khrapovogo-kolesa-i-mekhanizmu-sobachki-dlya-peretvorennya-linijjnogo-rukhu-aktivaci-indikatora-u-povorotne-pere.html" target="_blank" rel="follow" title="База патентів України">Лічильник для інгалятора (варіанти), інгалятор та спосіб створення храпового колеса і механізму собачки для перетворення лінійного руху активації індикатора у поворотне переміщення дисплейного засобу</a>
Механізм переміщення колеса транспортного засобу у вертикальній поздовжій площині
Номер патенту: 815
Опубліковано: 01.01.1993
Автор: Москаль Григорій Євдокимович
МПК: B62D 53/00
Мітки: площині, колеса, засобу, переміщення, вертикальний, механізм, поздовжій, транспортного
Формула / Реферат:
Механизм перемещения колеса транспортного средства в вертикальной продольной плоскости, содержащий приводной винт, закрепленную на оси транспортного средства с возможностью вращения в вертикальной плоскости двуплечую стойку, на одном конце которой установлено колесо, отличающийся тем, что, с целью упрощения конструкции и расширения эксплуатационных возможностей, устройство снабжено установленным на приводном валу вильчатым ползуном,...
Застосування храпового механізму як запобіжника натяжіння клинових пасів багаторівчакової передачі, протилежного робочому
Номер патенту: 86017
Опубліковано: 25.03.2009
Автор: Скочко Євген Вікторович
МПК: F16H 7/02
Мітки: пасів, механізму, протилежного, запобіжника, багаторівчакової, храпового, клинових, застосування, передачі, натяжіння, робочому
Формула / Реферат:
Застосування храпового механізму як запобіжника натяжіння клинових пасів збірного шківа багаторівчакової передачі, протилежного робочому.
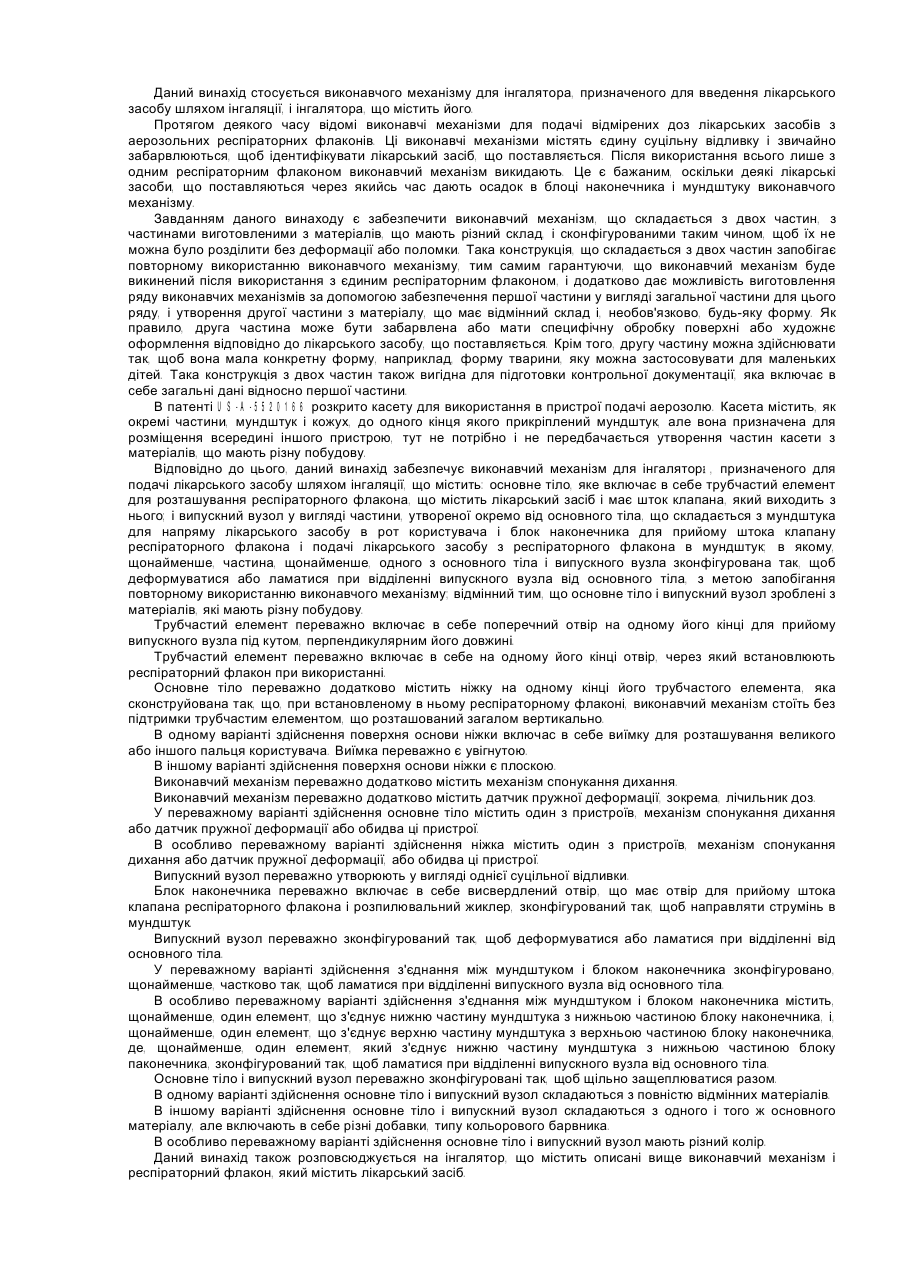
Виконавчий механізм для інгалятора та інгалятор, що містить виконавчий механізм
Номер патенту: 66820
Опубліковано: 15.06.2004
Автори: Ходсон Деррен, Расмуссен Ерген
МПК: A61M 15/00, A61M 11/00
Мітки: інгалятора, інгалятор, виконавчий, містить, механізм
Формула / Реферат:
1. Виконавчий механізм для інгалятора, призначеного для введення лікарського засобу шляхом інгаляції, що містить основне тіло (2), що включає в себе трубчастий елемент (8) для прийому респіраторного флакона (7), що містить лікарський засіб, і шток (11) клапана, що виходить з нього, випускний вузол (4) у вигляді частини, утвореної окремо від основного тіла (2), що містить мундштук для направлення лікарського засобу в рот користувача і блок...
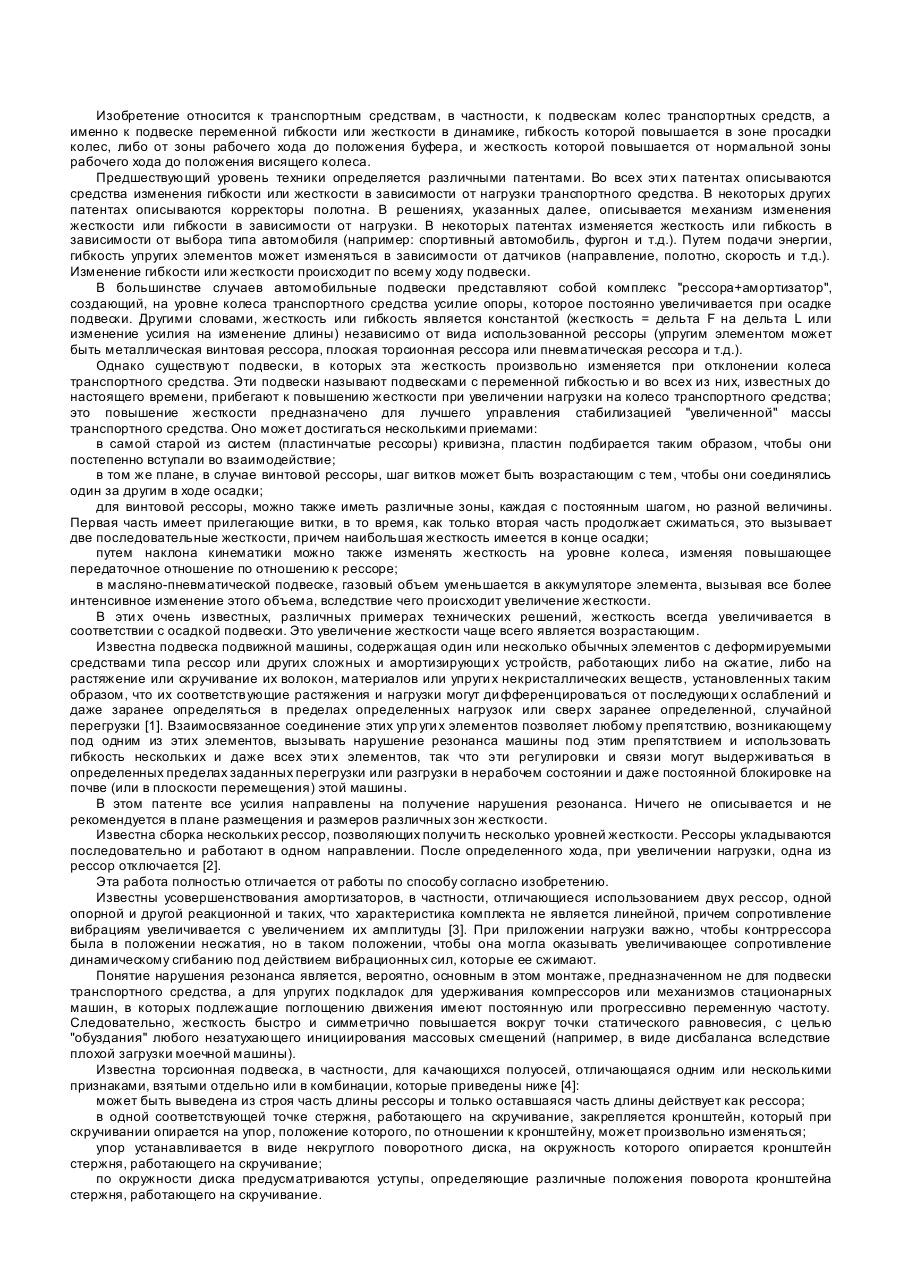
Спосіб підвіски колеса транспортного засобу та підвіска колеса транспортного засобу
Номер патенту: 27106
Опубліковано: 28.02.2000
Автор: МОРО БІАНШІ
МПК: B60G 11/00
Мітки: засобу, колеса, підвіски, транспортного, спосіб, підвіска
Формула / Реферат:
1. Способ подвески колеса транспортного средства, включающий использование упругих элементов для подрессоривания и амортизации колеса с изменением их жесткости в динамике, отличающийся тем, что изменение жесткости производят таким образом, что величина жесткости между "походным положением" и положением "висящего колеса" превосходит в три раза величину жесткости при осадке колеса до упора в противоударный буфер.2....
Спосіб створення індикатора відкривання упаковки
Номер патенту: 47726
Опубліковано: 15.07.2002
Автори: Нежурбіда Ігор Андрійович, Рожкова Тетяна Олександрівна
МПК: B65D 55/02, B65D 49/00
Мітки: спосіб, індикатора, створення, упаковки, відкривання
Формула / Реферат:
1. Спосіб утворення індикатора відкривання упаковки, який полягає в тому, що тару наповнюють продуктом, закривають кришкою та закріплюють на поверхні тари захисний елемент, який являє собою нитку або смужку, яка зв'язує кришку та тару, причому на кришці або на тарі нитку або смужку закріплюють за допомогою пломби з твердіючого матеріалу із забезпеченням руйнування пломби або нитки чи смужки при відкриванні тари.2. Спосіб за п. 1, який...
Попередній патент: Таблетки з поліпшеною дисперсністю лікарської речовини
Наступний патент: Складнополіефірні композиції, які містять поглинаючі кисень полідієни, та спосіб їх одержання
Випадковий патент: Брикет для виробництва синтетичного чавуну (його варіанти)