Картоплезбиральна машина

Формула / Реферат
1. Картоплезбиральна машина, що має оснащений принаймні одним підкопувальним агрегатом (2) підкопувальний пристрій (3) для підкопування гребенів (4) на посадках картоплі, який має один або декілька підкопувальних лемешів (5) та опирається на ґрунт через принаймні один додатковий опорний елемент, яка відрізняється тим, що опорний елемент утворений принаймні двома роликовими колесами (8, 8'), виконаними з можливістю їх регулювання за положенням або зсуву уздовж протилежних бічних сторін (6, 7) розташованого між роликовими колесами (8, 8') та обмеженого поперечною відстанню між ними гребеня (4) на посадках картоплі, таким чином, що забезпечують необхідне для подачі підкопаного ґрунту з бульбами картоплі у машину примусове спрямоване переміщення за типом каналу, що втягує.
2. Картоплезбиральна машина за п. 1, яка відрізняється тим, що обидва роликових колеса (8, 8') утворюють напрямний вузол (Е), що передає на ґрунт принаймні частину ваги (А) підкопувального агрегату (2), який керує підкопувальними лемешами (5) та діє на підкопувальному гребені (4) як допоміжний пристрій, що втягує або подає (стрілка S, S', Р).
3. Картоплезбиральна машина за п. 1 або 2, яка відрізняється тим, що у багаторядному, переважно чотирирядному, підкопувальному пристрої (3) кількість роликових коліс (8) завжди на одне більше кількості гребенів (4), що підкопують, на посадках картоплі.
4. Картоплезбиральна машина за будь-яким з пп. 1-3, яка відрізняється тим, що роликові колеса (8) мають узгоджуваний з умовами (К) копання картоплі діаметр (D).
5. Картоплезбиральна машина за будь-яким з пп. 1-4, яка відрізняється тим, що діаметр (D) роликових коліс (8) у декілька разів, насамперед у 2,5 рази, перевищує висоту (К) гребеня (4) на посадках картоплі.
6. Картоплезбиральна машина за будь-яким з пп. 1-5, яка відрізняється тим, що у багаторядному підкопувальному пристрої (3) всі роликові колеса (8) мають однаковий діаметр (D).
7. Картоплезбиральна машина за будь-яким з пп. 1-6, яка відрізняється тим, що передбачена можливість зміни, насамперед залежно від інтервалу між гребенями (4) на посадках картоплі, відстані (В) між роликовими колесами (8), які установлені в ряд, перпендикулярний напрямку (F) руху картоплезбиральної машини.
8. Картоплезбиральна машина за п. 7, яка відрізняється тим, що роликові колеса (8) розташовані на різній відстані одне від одного.
9. Картоплезбиральна машина за будь-яким з пп. 1-8, яка відрізняється тим, що роликові колеса (8) виконані такими, що приводяться в обертання.
10. Картоплезбиральна машина за будь-яким з пп. 1-9, яка відрізняється тим, що роликові колеса (8) виконані регульованими за положенням у вертикальному напрямку (двонапрямлена стрілка N).
11. Картоплезбиральна машина за будь-яким з пп. 1-10, яка відрізняється тим, що роликові колеса (8) виконані регульованими за положенням поперечно напрямку (F) руху картоплезбиральної машини.
12. Картоплезбиральна машина за п. 10, яка відрізняється тим, що регулювання роликових коліс (8) за положенням у поперечному напрямку забезпечує можливість їх обпирання на дно наявної між кожними двома гребенями (4) на посадках картоплі борозни (9).
13. Картоплезбиральна машина за будь-яким з пп. 1-12, яка відрізняється тим, що у зоні роликових коліс (8) передбачений вимірювальний пристрій (22), який дозволяє регулювати глибину підкопування ґрунту підкопувальним пристроєм (3), відповідно кожним підкопувальним лемешем (5).
14. Картоплезбиральна машина за будь-яким з пп. 1-13, яка відрізняється тим, що підкопувальний пристрій (3), відповідно підкопувальний агрегат (2), має в зоні роликових коліс (8) принаймні один контактуючий з гребенями (4) на посадках картоплі копіювальний вузол (23).
15. Картоплезбиральна машина за будь-яким з пп. 1-14, яка відрізняється тим, що підкопувальний пристрій (3) має систему (11) тяг та важелів, яка з одного боку з'єднує його з рамою (10) картоплезбиральної машини, а з іншого боку несе розташовані біля підкопувальних лемешів (5) роликові колеса (8).
16. Картоплезбиральна машина за будь-яким з пп. 1-15, яка відрізняється тим, що роликові колеса (8) встановлені на поперечній осі (12) системи (11) тяг та важелів з можливістю обертання у напрямку, який супутній напрямку руху картоплезбиральної машини.
17. Картоплезбиральна машина за будь-яким з пп. 1-16, яка відрізняється тим, що система (11) тяг та важелів, яка має в основному симетричне відносно поздовжньої середньої площини (М) картоплезбиральної машини (1) виконання, виконана у вигляді рами з двома бічними приводними важелями (13, 14) й передньою поперечною балкою (15) таким чином, що підкопувальний пристрій (3) з можливістю його повороту суцільно з'єднаний з рамою (10) картоплезбиральної машини з'єднаними з кожним із приводних важелів (13, 14) підіймальними циліндрами (15, 16) та віддаленими від кожного з них упорними підшипниками (18, 19).
18. Картоплезбиральна машина за будь-яким з пп. 1-17, яка відрізняється тим, що поперечна вісь (12) з співвісно установленими на ній роликовими колесами (8) з'єднана принаймні одним поворотним важелем (20, 20'), що відходить радіально від неї, з системою (11) тяг та важелів таким чином, що забезпечується можливість зміни положення поперечної осі (12) разом з роликовими колесами (8) у вертикальному напрямку принаймні одним піднімальним органом (21).
19. Картоплезбиральна машина за п. 18, яка відрізняється тим, що поперечна вісь (12) з'єднана на кожному своєму кінці у зоні шарніра (27, 27') з системою (11) тяг та важелів, а кожний із двох передбачених як з'єднувачі піднімальних органів (21, 21') у вигляді паралельних піднімальних циліндрів взаємодіє з одним із відповідних поворотних важелів (20, 20').
20. Картоплезбиральна машина за будь-яким з пп. 1-19, яка відрізняється тим, що роликові колеса (8) взаємодіють з вимірювальним пристроєм (22, 23), який передбачений для автоматичного напрямляння підкопувального пристрою (3) уздовж гребенів (4) на посадках картоплі.
21. Картоплезбиральна машина за п. 20, яка відрізняється тим, що вимірювальний пристрій має відповідні датчики, які встановлені на несучих частинах роликових коліс (8).
22. Картоплезбиральна машина за п. 20 або 21, яка відрізняється тим, що вимірювальний пристрій має відповідні датчики, які вимірюють бічні зусилля (S, S'), що діють на принаймні один із двох поворотних важелів (20, 20').
23. Картоплезбиральна машина за будь-яким з пп. 1-22, яка відрізняється тим, що принаймні зовнішні роликові колеса (8") взаємодіють з ріжучим органом (28, 28').
24. Картоплезбиральна машина за п. 23, яка відрізняється тим, що як ріжучий орган (28) передбачений розташований на роликових колесах (8") ріжучий елемент (29).
25. Картоплезбиральна машина за п. 23 або 24, яка відрізняється тим, що як ріжучий елемент (29) передбачене кільце (31) з ріжучою крайкою (30).
26. Картоплезбиральна машина за будь-яким з пп. 23-25, яка відрізняється тим, що кільце (31) безпосередньо з'єднане з роликовим колесом (8") за його краєм або по центру.
27. Картоплезбиральна машина за будь-яким з пп. 23-26, яка відрізняється тим, що кожне із зовнішніх роликових коліс (8") й/або ріжучий орган (28) виконані регульованими за положенням уздовж поперечної осі (12) й/або за глибиною підкопування гребеня на посадках картоплі.
Текст
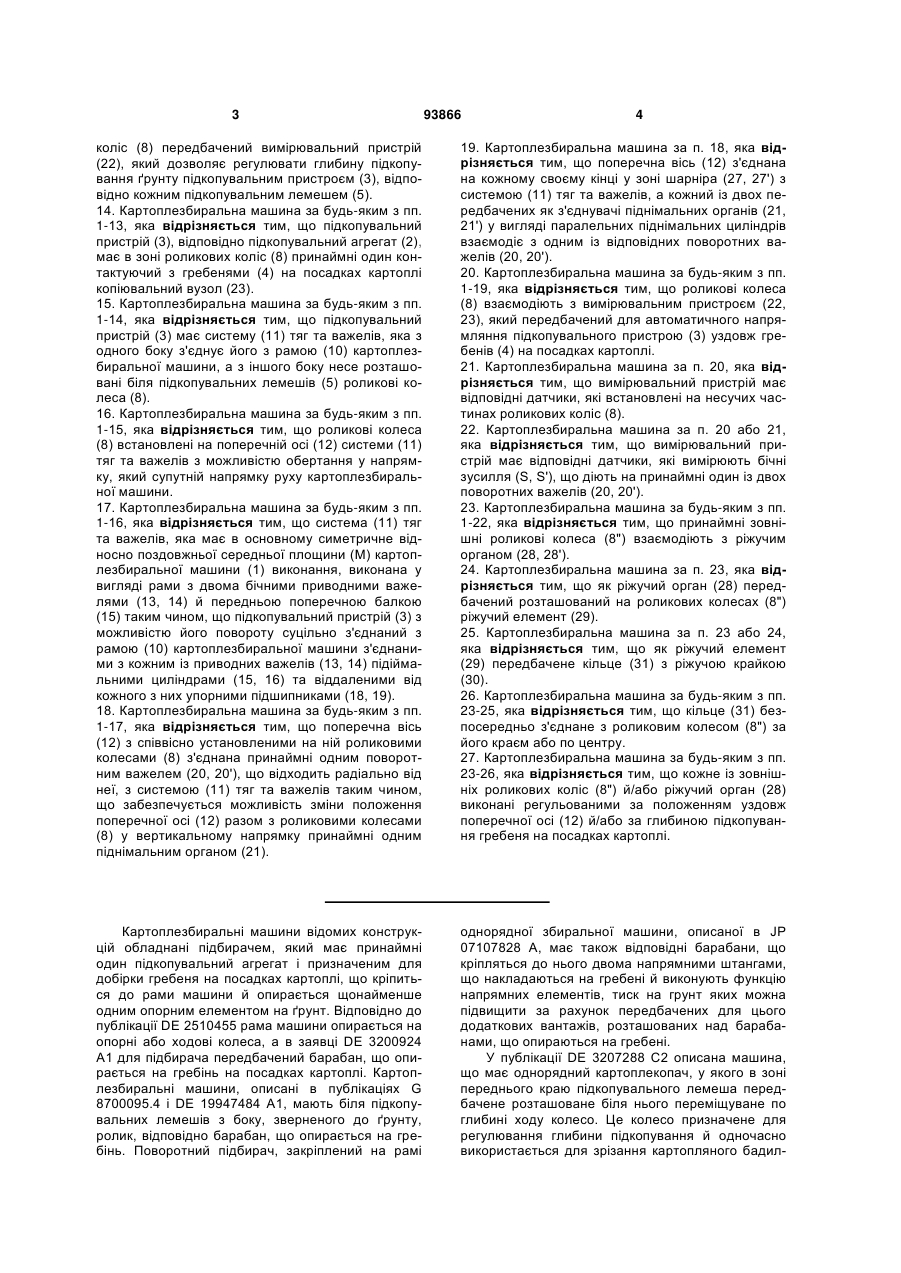
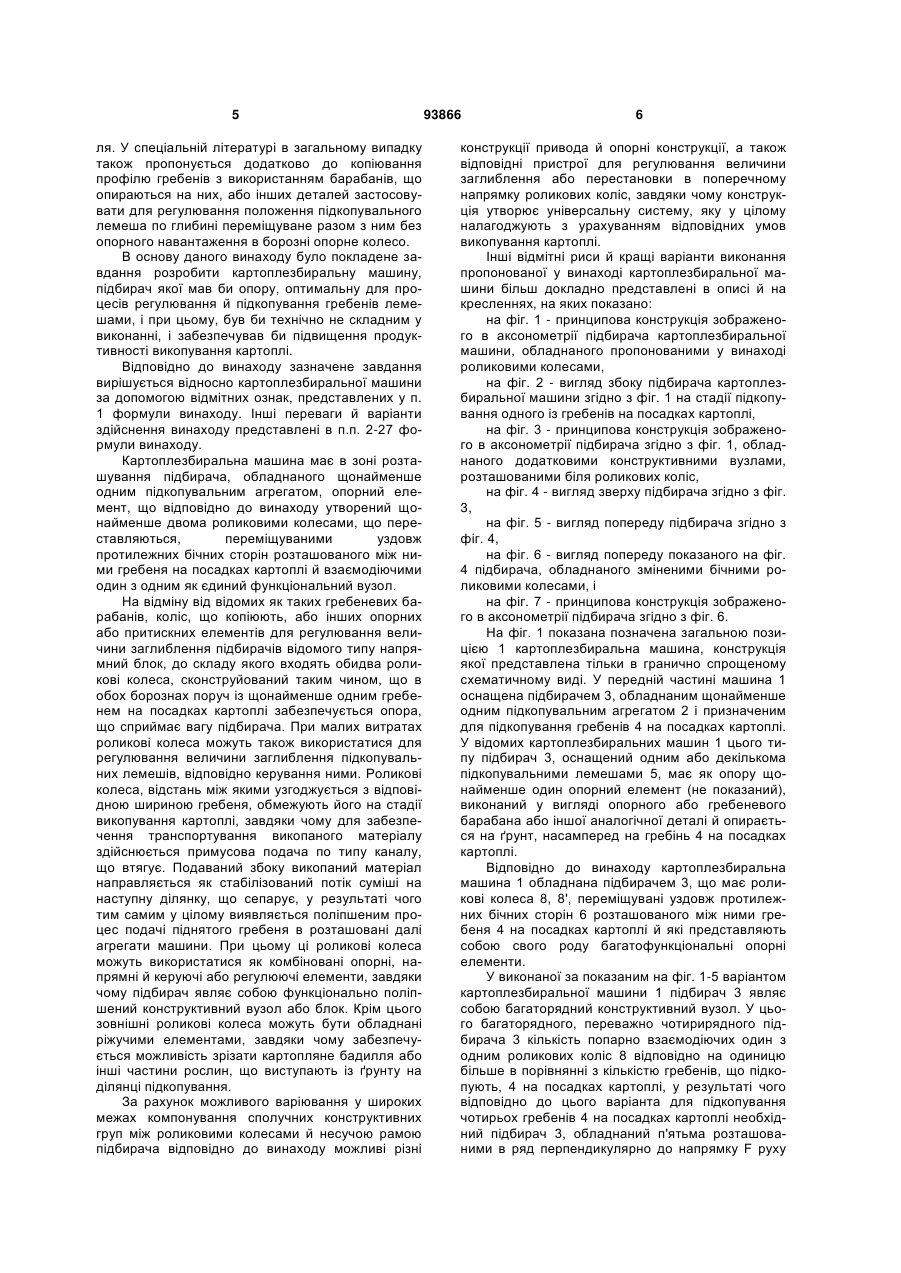
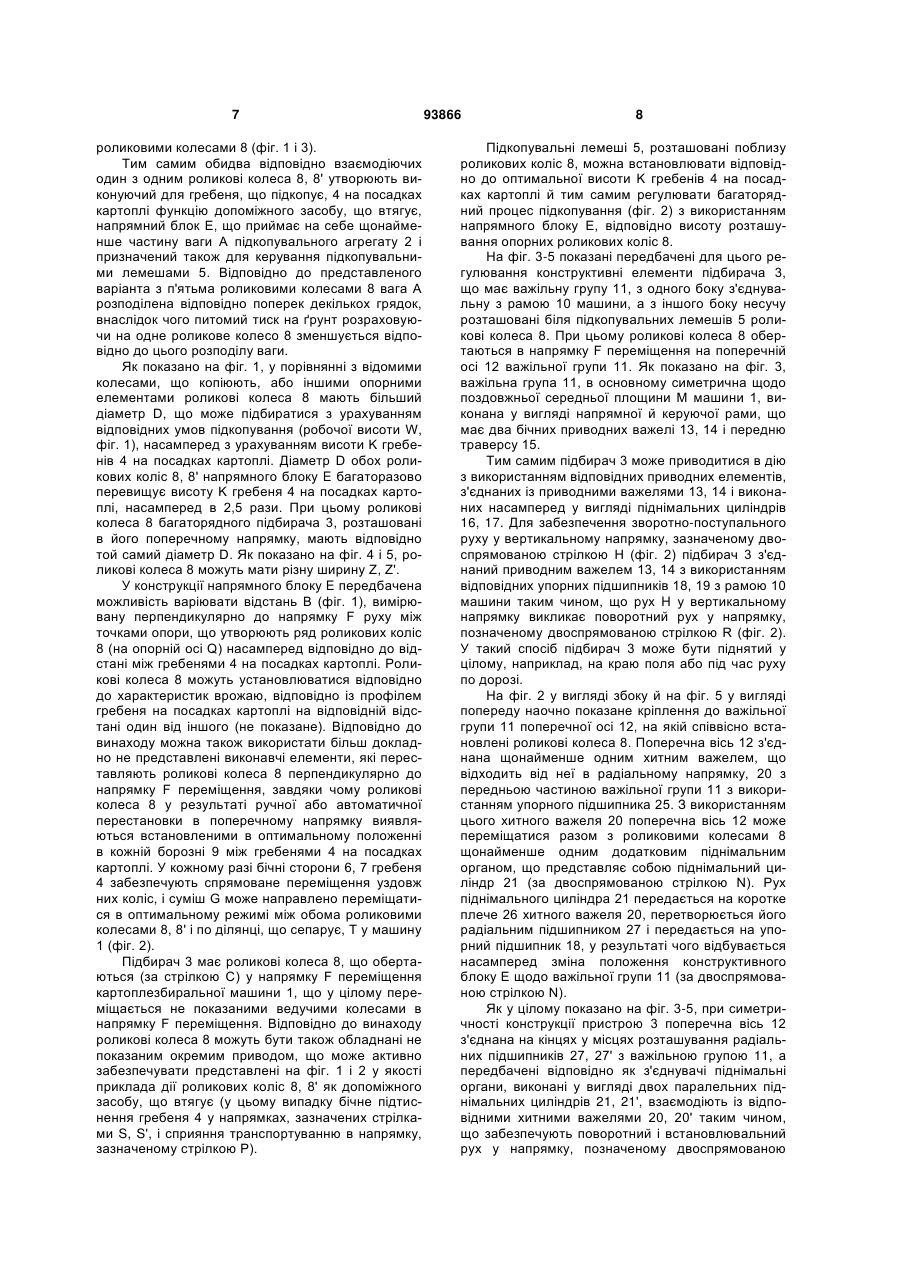
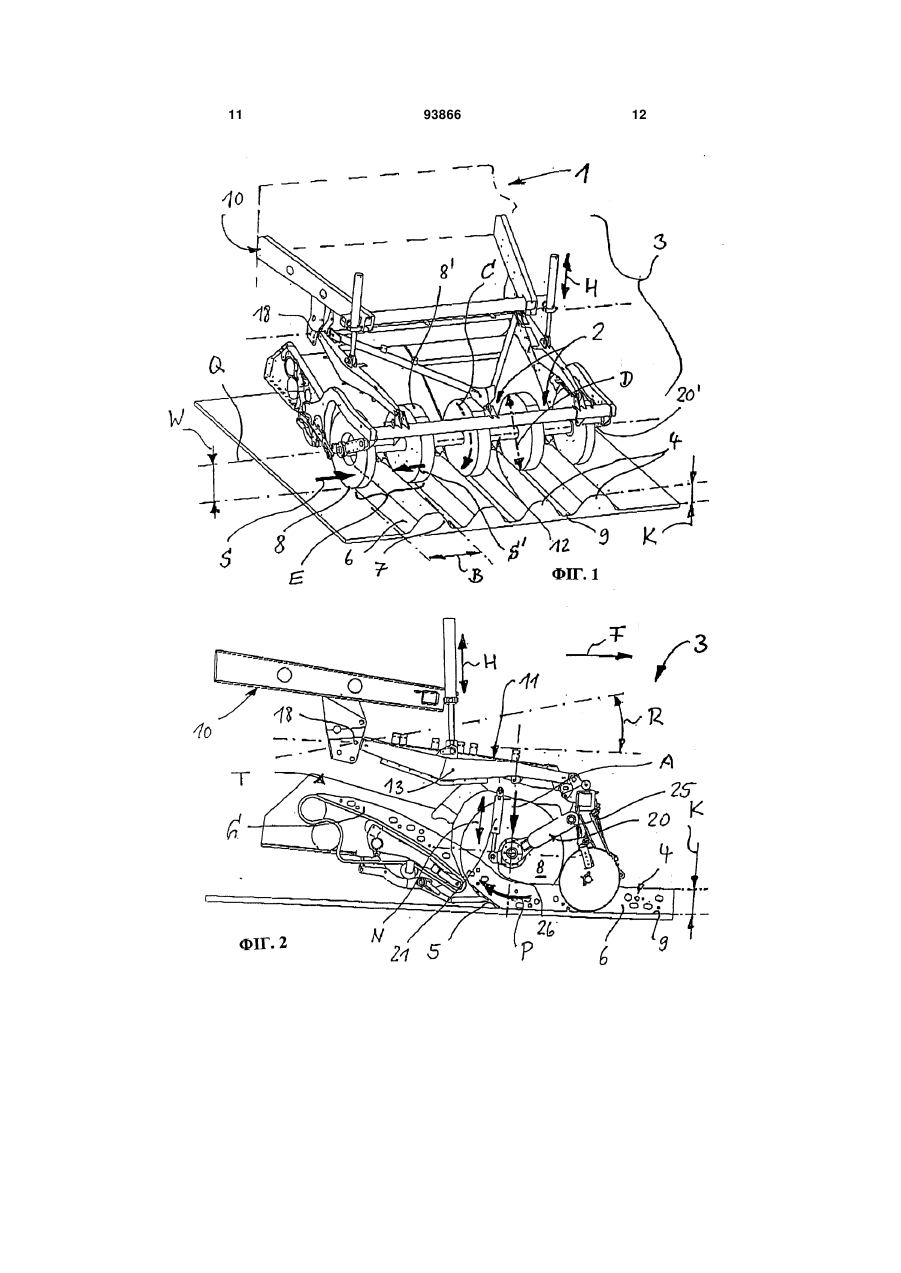
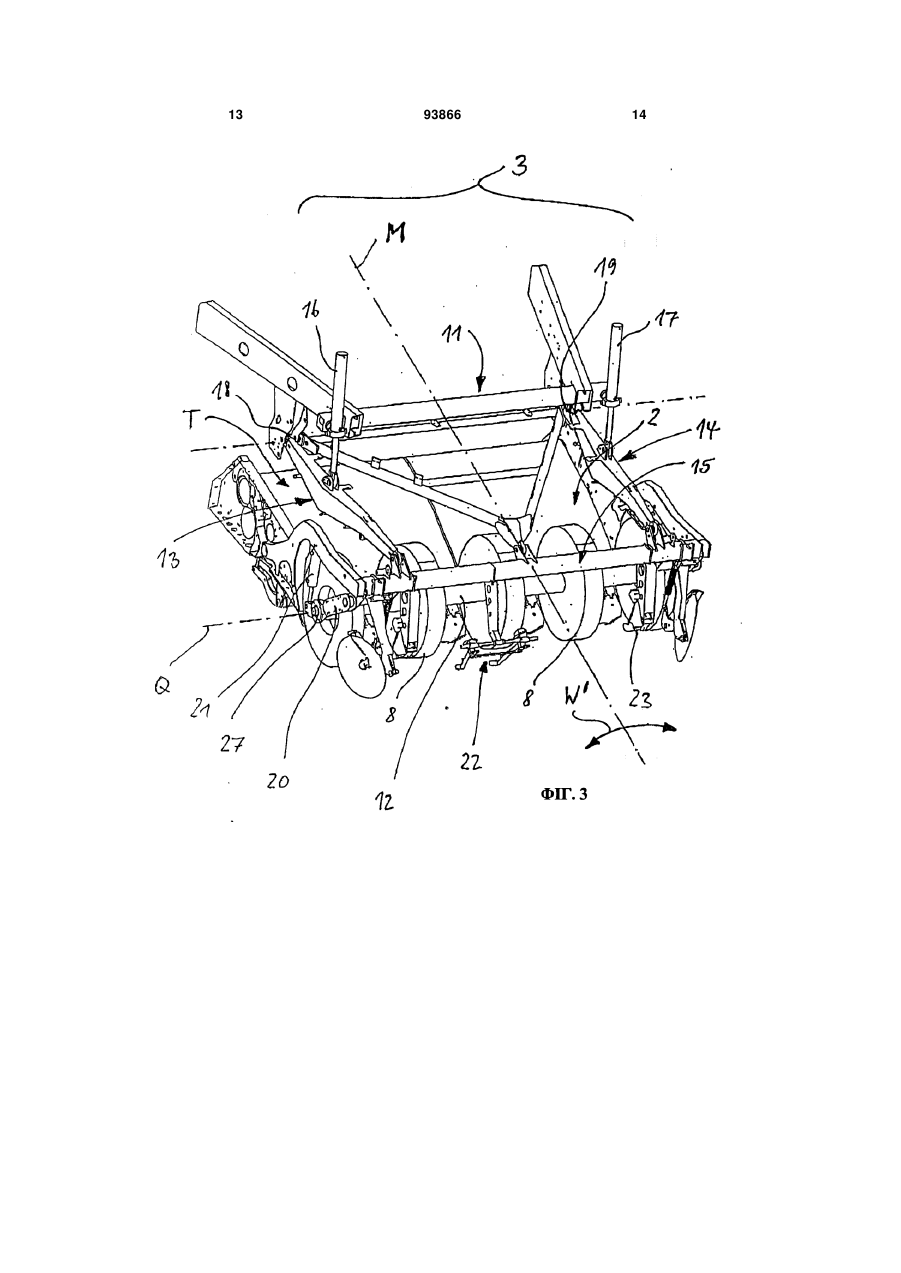
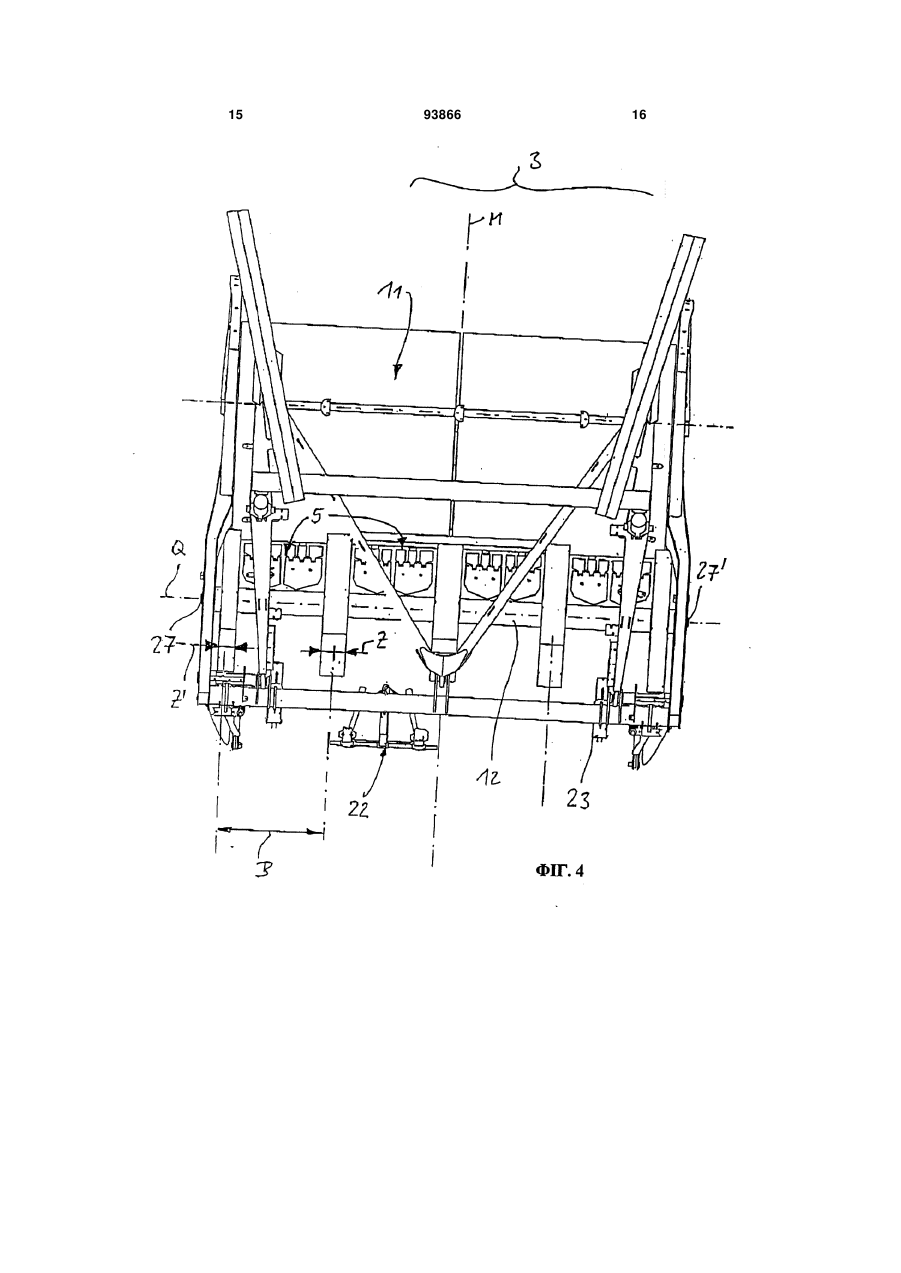
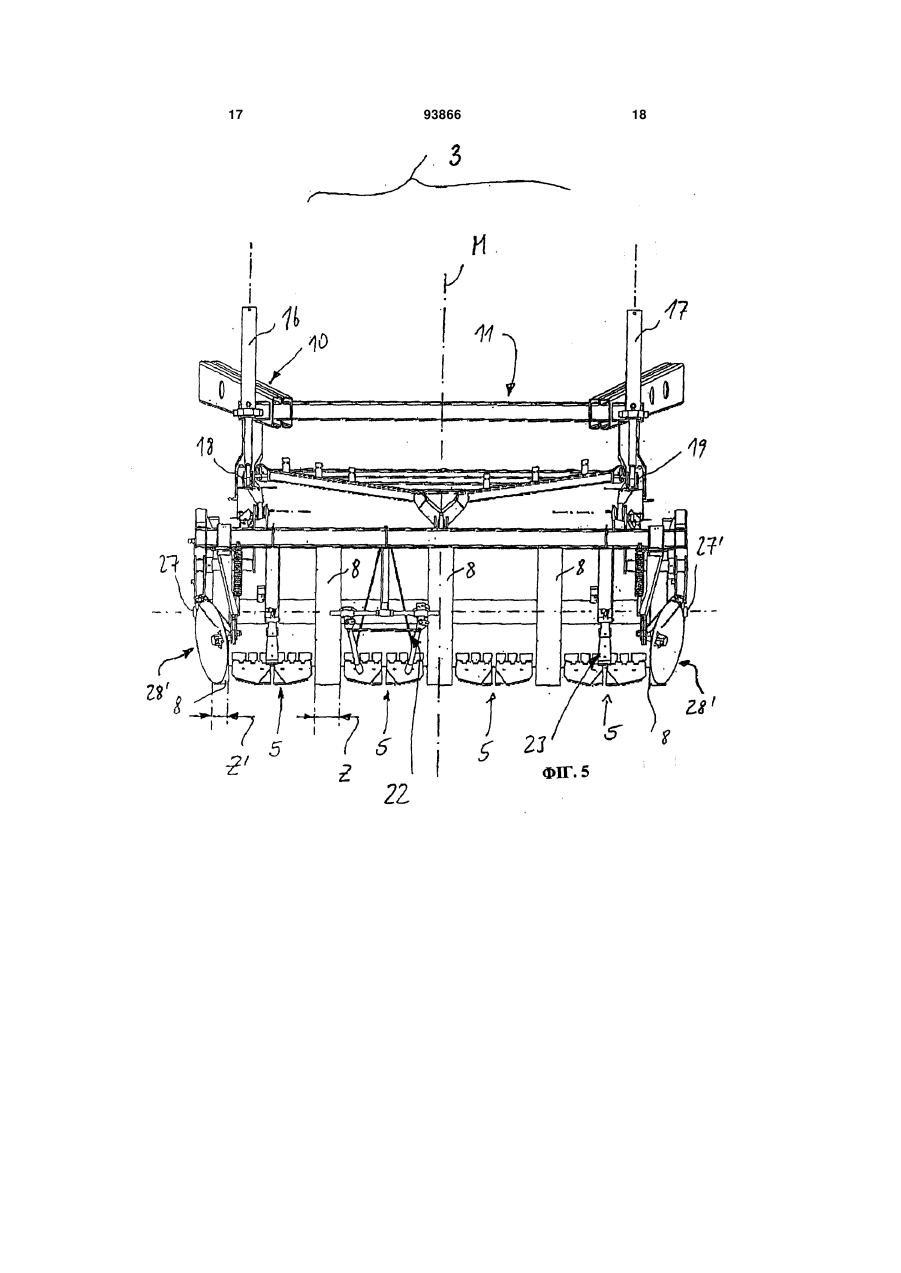
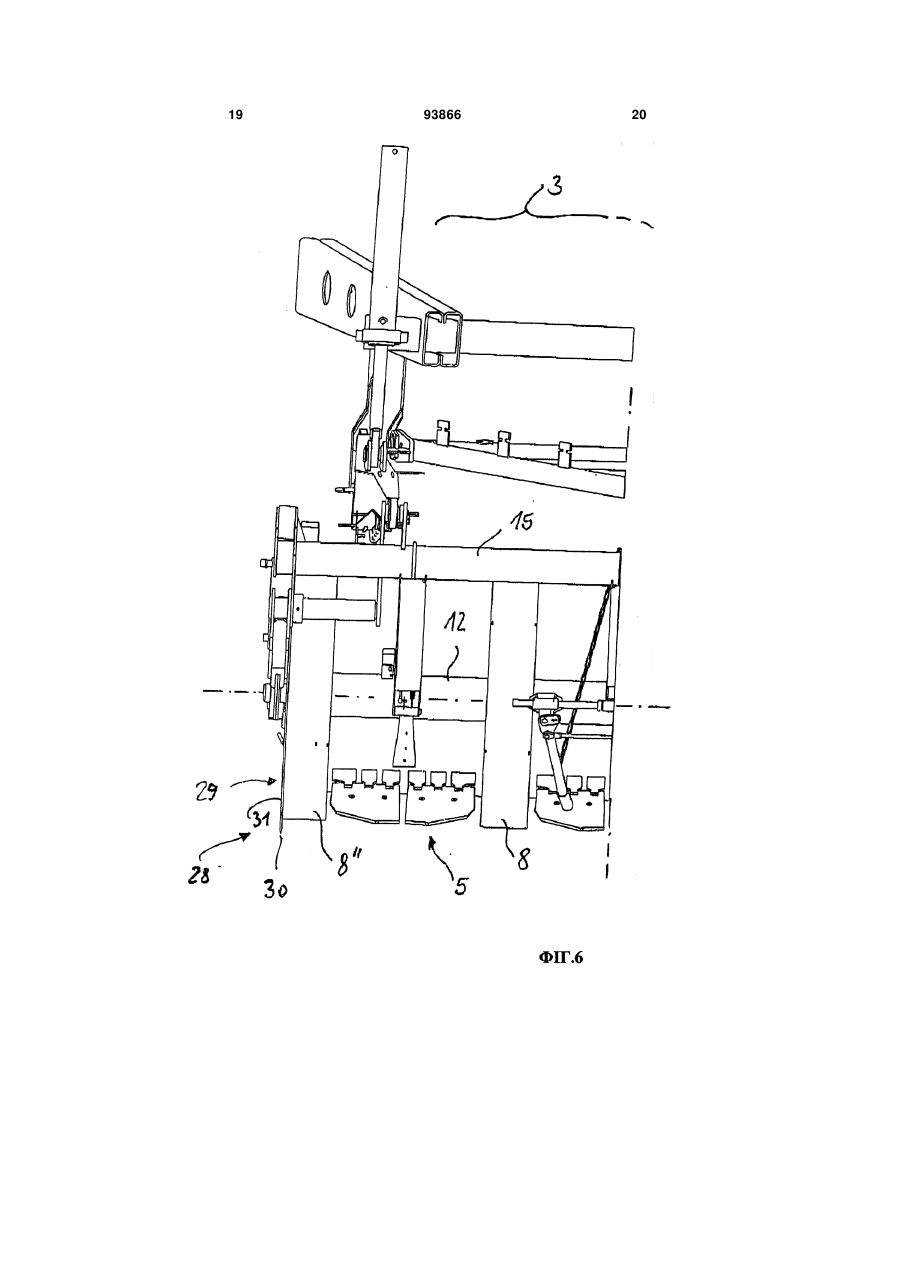
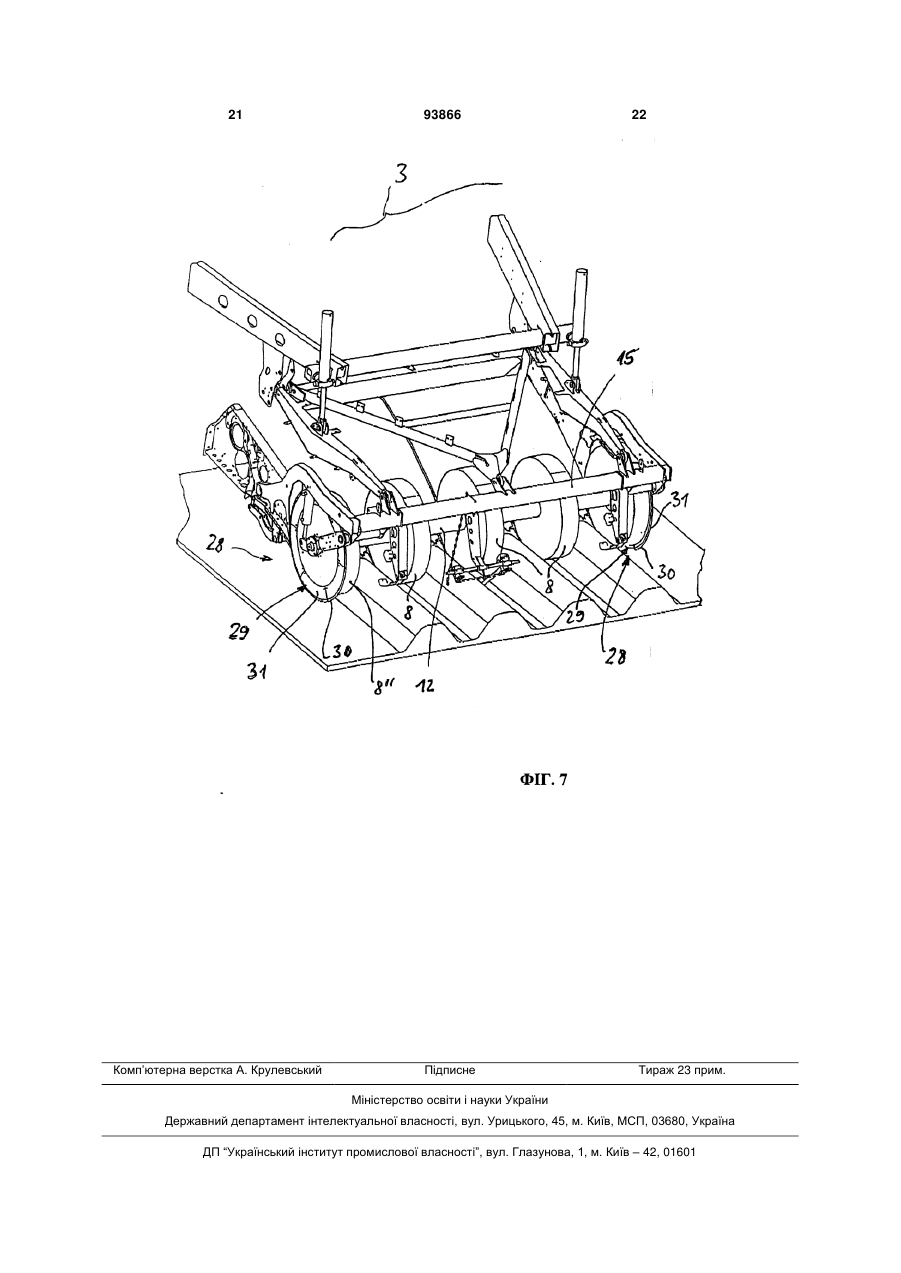
1. Картоплезбиральна машина, що має оснащений принаймні одним підкопувальним агрегатом (2) підкопувальний пристрій (3) для підкопування гребенів (4) на посадках картоплі, який має один або декілька підкопувальних лемешів (5) та опирається на ґрунт через принаймні один додатковий опорний елемент, яка відрізняється тим, що опорний елемент утворений принаймні двома роликовими колесами (8, 8'), виконаними з можливістю їх регулювання за положенням або зсуву уздовж протилежних бічних сторін (6, 7) розташованого між роликовими колесами (8, 8') та обмеженого поперечною відстанню між ними гребеня (4) на посадках картоплі, таким чином, що забезпечують необхідне для подачі підкопаного ґрунту з бульбами картоплі у машину примусове спрямоване переміщення за типом каналу, що втягує. 2. Картоплезбиральна машина за п. 1, яка відрізняється тим, що обидва роликових колеса (8, 8') утворюють напрямний вузол (Е), що передає на ґрунт принаймні частину ваги (А) підкопувального агрегату (2), який керує підкопувальними лемешами (5) та діє на підкопувальному гребені (4) як допоміжний пристрій, що втягує або подає (стрілка S, S', Р). 3. Картоплезбиральна машина за п. 1 або 2, яка 2 (19) 1 3 93866 4 коліс (8) передбачений вимірювальний пристрій (22), який дозволяє регулювати глибину підкопування ґрунту підкопувальним пристроєм (3), відповідно кожним підкопувальним лемешем (5). 14. Картоплезбиральна машина за будь-яким з пп. 1-13, яка відрізняється тим, що підкопувальний пристрій (3), відповідно підкопувальний агрегат (2), має в зоні роликових коліс (8) принаймні один контактуючий з гребенями (4) на посадках картоплі копіювальний вузол (23). 15. Картоплезбиральна машина за будь-яким з пп. 1-14, яка відрізняється тим, що підкопувальний пристрій (3) має систему (11) тяг та важелів, яка з одного боку з'єднує його з рамою (10) картоплезбиральної машини, а з іншого боку несе розташовані біля підкопувальних лемешів (5) роликові колеса (8). 16. Картоплезбиральна машина за будь-яким з пп. 1-15, яка відрізняється тим, що роликові колеса (8) встановлені на поперечній осі (12) системи (11) тяг та важелів з можливістю обертання у напрямку, який супутній напрямку руху картоплезбиральної машини. 17. Картоплезбиральна машина за будь-яким з пп. 1-16, яка відрізняється тим, що система (11) тяг та важелів, яка має в основному симетричне відносно поздовжньої середньої площини (М) картоплезбиральної машини (1) виконання, виконана у вигляді рами з двома бічними приводними важелями (13, 14) й передньою поперечною балкою (15) таким чином, що підкопувальний пристрій (3) з можливістю його повороту суцільно з'єднаний з рамою (10) картоплезбиральної машини з'єднаними з кожним із приводних важелів (13, 14) підіймальними циліндрами (15, 16) та віддаленими від кожного з них упорними підшипниками (18, 19). 18. Картоплезбиральна машина за будь-яким з пп. 1-17, яка відрізняється тим, що поперечна вісь (12) з співвісно установленими на ній роликовими колесами (8) з'єднана принаймні одним поворотним важелем (20, 20'), що відходить радіально від неї, з системою (11) тяг та важелів таким чином, що забезпечується можливість зміни положення поперечної осі (12) разом з роликовими колесами (8) у вертикальному напрямку принаймні одним піднімальним органом (21). 19. Картоплезбиральна машина за п. 18, яка відрізняється тим, що поперечна вісь (12) з'єднана на кожному своєму кінці у зоні шарніра (27, 27') з системою (11) тяг та важелів, а кожний із двох передбачених як з'єднувачі піднімальних органів (21, 21') у вигляді паралельних піднімальних циліндрів взаємодіє з одним із відповідних поворотних важелів (20, 20'). 20. Картоплезбиральна машина за будь-яким з пп. 1-19, яка відрізняється тим, що роликові колеса (8) взаємодіють з вимірювальним пристроєм (22, 23), який передбачений для автоматичного напрямляння підкопувального пристрою (3) уздовж гребенів (4) на посадках картоплі. 21. Картоплезбиральна машина за п. 20, яка відрізняється тим, що вимірювальний пристрій має відповідні датчики, які встановлені на несучих частинах роликових коліс (8). 22. Картоплезбиральна машина за п. 20 або 21, яка відрізняється тим, що вимірювальний пристрій має відповідні датчики, які вимірюють бічні зусилля (S, S'), що діють на принаймні один із двох поворотних важелів (20, 20'). 23. Картоплезбиральна машина за будь-яким з пп. 1-22, яка відрізняється тим, що принаймні зовнішні роликові колеса (8") взаємодіють з ріжучим органом (28, 28'). 24. Картоплезбиральна машина за п. 23, яка відрізняється тим, що як ріжучий орган (28) передбачений розташований на роликових колесах (8") ріжучий елемент (29). 25. Картоплезбиральна машина за п. 23 або 24, яка відрізняється тим, що як ріжучий елемент (29) передбачене кільце (31) з ріжучою крайкою (30). 26. Картоплезбиральна машина за будь-яким з пп. 23-25, яка відрізняється тим, що кільце (31) безпосередньо з'єднане з роликовим колесом (8") за його краєм або по центру. 27. Картоплезбиральна машина за будь-яким з пп. 23-26, яка відрізняється тим, що кожне із зовнішніх роликових коліс (8") й/або ріжучий орган (28) виконані регульованими за положенням уздовж поперечної осі (12) й/або за глибиною підкопування гребеня на посадках картоплі. Картоплезбиральні машини відомих конструкцій обладнані підбирачем, який має принаймні один підкопувальний агрегат і призначеним для добірки гребеня на посадках картоплі, що кріпиться до рами машини й опирається щонайменше одним опорним елементом на ґрунт. Відповідно до публікації DE 2510455 рама машини опирається на опорні або ходові колеса, а в заявці DE 3200924 A1 для підбирача передбачений барабан, що опирається на гребінь на посадках картоплі. Картоплезбиральні машини, описані в публікаціях G 8700095.4 і DE 19947484 A1, мають біля підкопувальних лемешів з боку, зверненого до ґрунту, ролик, відповідно барабан, що опирається на гребінь. Поворотний підбирач, закріплений на рамі однорядної збиральної машини, описаної в JP 07107828 А, має також відповідні барабани, що кріпляться до нього двома напрямними штангами, що накладаються на гребені й виконують функцію напрямних елементів, тиск на грунт яких можна підвищити за рахунок передбачених для цього додаткових вантажів, розташованих над барабанами, що опираються на гребені. У публікації DE 3207288 С2 описана машина, що має однорядний картоплекопач, у якого в зоні переднього краю підкопувального лемеша передбачене розташоване біля нього переміщуване по глибині ходу колесо. Це колесо призначене для регулювання глибини підкопування й одночасно використається для зрізання картопляного бадил 5 ля. У спеціальній літературі в загальному випадку також пропонується додатково до копіювання профілю гребенів з використанням барабанів, що опираються на них, або інших деталей застосовувати для регулювання положення підкопувального лемеша по глибині переміщуване разом з ним без опорного навантаження в борозні опорне колесо. В основу даного винаходу було покладене завдання розробити картоплезбиральну машину, підбирач якої мав би опору, оптимальну для процесів регулювання й підкопування гребенів лемешами, і при цьому, був би технічно не складним у виконанні, і забезпечував би підвищення продуктивності викопування картоплі. Відповідно до винаходу зазначене завдання вирішується відносно картоплезбиральної машини за допомогою відмітних ознак, представлених у п. 1 формули винаходу. Інші переваги й варіанти здійснення винаходу представлені в п.п. 2-27 формули винаходу. Картоплезбиральна машина має в зоні розташування підбирача, обладнаного щонайменше одним підкопувальним агрегатом, опорний елемент, що відповідно до винаходу утворений щонайменше двома роликовими колесами, що переставляються, переміщуваними уздовж протилежних бічних сторін розташованого між ними гребеня на посадках картоплі й взаємодіючими один з одним як єдиний функціональний вузол. На відміну від відомих як таких гребеневих барабанів, коліс, що копіюють, або інших опорних або притискних елементів для регулювання величини заглиблення підбирачів відомого типу напрямний блок, до складу якого входять обидва роликові колеса, сконструйований таким чином, що в обох борознах поруч із щонайменше одним гребенем на посадках картоплі забезпечується опора, що сприймає вагу підбирача. При малих витратах роликові колеса можуть також використатися для регулювання величини заглиблення підкопувальних лемешів, відповідно керування ними. Роликові колеса, відстань між якими узгоджується з відповідною шириною гребеня, обмежують його на стадії викопування картоплі, завдяки чому для забезпечення транспортування викопаного матеріалу здійснюється примусова подача по типу каналу, що втягує. Подаваний збоку викопаний матеріал направляється як стабілізований потік суміші на наступну ділянку, що сепарує, у результаті чого тим самим у цілому виявляється поліпшеним процес подачі піднятого гребеня в розташовані далі агрегати машини. При цьому ці роликові колеса можуть використатися як комбіновані опорні, напрямні й керуючі або регулюючі елементи, завдяки чому підбирач являє собою функціонально поліпшений конструктивний вузол або блок. Крім цього зовнішні роликові колеса можуть бути обладнані ріжучими елементами, завдяки чому забезпечується можливість зрізати картопляне бадилля або інші частини рослин, що виступають із ґрунту на ділянці підкопування. За рахунок можливого варіювання у широких межах компонування сполучних конструктивних груп між роликовими колесами й несучою рамою підбирача відповідно до винаходу можливі різні 93866 6 конструкції привода й опорні конструкції, а також відповідні пристрої для регулювання величини заглиблення або перестановки в поперечному напрямку роликових коліс, завдяки чому конструкція утворює універсальну систему, яку у цілому налагоджують з урахуванням відповідних умов викопування картоплі. Інші відмітні риси й кращі варіанти виконання пропонованої у винаході картоплезбиральної машини більш докладно представлені в описі й на кресленнях, на яких показано: на фіг. 1 - принципова конструкція зображеного в аксонометрії підбирача картоплезбиральної машини, обладнаного пропонованими у винаході роликовими колесами, на фіг. 2 - вигляд збоку підбирача картоплезбиральної машини згідно з фіг. 1 на стадії підкопування одного із гребенів на посадках картоплі, на фіг. 3 - принципова конструкція зображеного в аксонометрії підбирача згідно з фіг. 1, обладнаного додатковими конструктивними вузлами, розташованими біля роликових коліс, на фіг. 4 - вигляд зверху підбирача згідно з фіг. 3, на фіг. 5 - вигляд попереду підбирача згідно з фіг. 4, на фіг. 6 - вигляд попереду показаного на фіг. 4 підбирача, обладнаного зміненими бічними роликовими колесами, і на фіг. 7 - принципова конструкція зображеного в аксонометрії підбирача згідно з фіг. 6. На фіг. 1 показана позначена загальною позицією 1 картоплезбиральна машина, конструкція якої представлена тільки в гранично спрощеному схематичному виді. У передній частині машина 1 оснащена підбирачем 3, обладнаним щонайменше одним підкопувальним агрегатом 2 і призначеним для підкопування гребенів 4 на посадках картоплі. У відомих картоплезбиральних машин 1 цього типу підбирач 3, оснащений одним або декількома підкопувальними лемешами 5, має як опору щонайменше один опорний елемент (не показаний), виконаний у вигляді опорного або гребеневого барабана або іншої аналогічної деталі й опирається на ґрунт, насамперед на гребінь 4 на посадках картоплі. Відповідно до винаходу картоплезбиральна машина 1 обладнана підбирачем 3, що має роликові колеса 8, 8', переміщувані уздовж протилежних бічних сторін 6 розташованого між ними гребеня 4 на посадках картоплі й які представляють собою свого роду багатофункціональні опорні елементи. У виконаної за показаним на фіг. 1-5 варіантом картоплезбиральної машини 1 підбирач 3 являє собою багаторядний конструктивний вузол. У цього багаторядного, переважно чотирирядного підбирача 3 кількість попарно взаємодіючих один з одним роликових коліс 8 відповідно на одиницю більше в порівнянні з кількістю гребенів, що підкопують, 4 на посадках картоплі, у результаті чого відповідно до цього варіанта для підкопування чотирьох гребенів 4 на посадках картоплі необхідний підбирач 3, обладнаний п'ятьма розташованими в ряд перпендикулярно до напрямку F руху 7 роликовими колесами 8 (фіг. 1 і 3). Тим самим обидва відповідно взаємодіючих один з одним роликові колеса 8, 8' утворюють виконуючий для гребеня, що підкопує, 4 на посадках картоплі функцію допоміжного засобу, що втягує, напрямний блок Е, що приймає на себе щонайменше частину ваги А підкопувального агрегату 2 і призначений також для керування підкопувальними лемешами 5. Відповідно до представленого варіанта з п'ятьма роликовими колесами 8 вага А розподілена відповідно поперек декількох грядок, внаслідок чого питомий тиск на ґрунт розраховуючи на одне роликове колесо 8 зменшується відповідно до цього розподілу ваги. Як показано на фіг. 1, у порівнянні з відомими колесами, що копіюють, або іншими опорними елементами роликові колеса 8 мають більший діаметр D, що може підбиратися з урахуванням відповідних умов підкопування (робочої висоти W, фіг. 1), насамперед з урахуванням висоти K гребенів 4 на посадках картоплі. Діаметр D обох роликових коліс 8, 8' напрямного блоку E багаторазово перевищує висоту K гребеня 4 на посадках картоплі, насамперед в 2,5 рази. При цьому роликові колеса 8 багаторядного підбирача 3, розташовані в його поперечному напрямку, мають відповідно той самий діаметр D. Як показано на фіг. 4 і 5, роликові колеса 8 можуть мати різну ширину Z, Z'. У конструкції напрямного блоку E передбачена можливість варіювати відстань В (фіг. 1), вимірювану перпендикулярно до напрямку F руху між точками опори, що утворюють ряд роликових коліс 8 (на опорній осі Q) насамперед відповідно до відстані між гребенями 4 на посадках картоплі. Роликові колеса 8 можуть установлюватися відповідно до характеристик врожаю, відповідно із профілем гребеня на посадках картоплі на відповідній відстані один від іншого (не показане). Відповідно до винаходу можна також використати більш докладно не представлені виконавчі елементи, які переставляють роликові колеса 8 перпендикулярно до напрямку F переміщення, завдяки чому роликові колеса 8 у результаті ручної або автоматичної перестановки в поперечному напрямку виявляються встановленими в оптимальному положенні в кожній борозні 9 між гребенями 4 на посадках картоплі. У кожному разі бічні сторони 6, 7 гребеня 4 забезпечують спрямоване переміщення уздовж них коліс, і суміш G може направлено переміщатися в оптимальному режимі між обома роликовими колесами 8, 8' і по ділянці, що сепарує, T у машину 1 (фіг. 2). Підбирач 3 має роликові колеса 8, що обертаються (за стрілкою C) у напрямку F переміщення картоплезбиральної машини 1, що у цілому переміщається не показаними ведучими колесами в напрямку F переміщення. Відповідно до винаходу роликові колеса 8 можуть бути також обладнані не показаним окремим приводом, що може активно забезпечувати представлені на фіг. 1 і 2 у якості приклада дії роликових коліс 8, 8' як допоміжного засобу, що втягує (у цьому випадку бічне підтиснення гребеня 4 у напрямках, зазначених стрілками S, S', і сприяння транспортуванню в напрямку, зазначеному стрілкою Р). 93866 8 Підкопувальні лемеші 5, розташовані поблизу роликових коліс 8, можна встановлювати відповідно до оптимальної висоти K гребенів 4 на посадках картоплі й тим самим регулювати багаторядний процес підкопування (фіг. 2) з використанням напрямного блоку Е, відповідно висоту розташування опорних роликових коліс 8. На фіг. 3-5 показані передбачені для цього регулювання конструктивні елементи підбирача 3, що має важільну групу 11, з одного боку з'єднувальну з рамою 10 машини, а з іншого боку несучу розташовані біля підкопувальних лемешів 5 роликові колеса 8. При цьому роликові колеса 8 обертаються в напрямку F переміщення на поперечній осі 12 важільної групи 11. Як показано на фіг. 3, важільна група 11, в основному симетрична щодо поздовжньої середньої площини M машини 1, виконана у вигляді напрямної й керуючої рами, що має два бічних приводних важелі 13, 14 і передню траверсу 15. Тим самим підбирач 3 може приводитися в дію з використанням відповідних приводних елементів, з'єднаних із приводними важелями 13, 14 і виконаних насамперед у вигляді піднімальних циліндрів 16, 17. Для забезпечення зворотно-поступального руху у вертикальному напрямку, зазначеному двоспрямованою стрілкою H (фіг. 2) підбирач 3 з'єднаний приводним важелем 13, 14 з використанням відповідних упорних підшипників 18, 19 з рамою 10 машини таким чином, що рух H у вертикальному напрямку викликає поворотний рух у напрямку, позначеному двоспрямованою стрілкою R (фіг. 2). У такий спосіб підбирач 3 може бути піднятий у цілому, наприклад, на краю поля або під час руху по дорозі. На фіг. 2 у вигляді збоку й на фіг. 5 у вигляді попереду наочно показане кріплення до важільної групи 11 поперечної осі 12, на якій співвісно встановлені роликові колеса 8. Поперечна вісь 12 з'єднана щонайменше одним хитним важелем, що відходить від неї в радіальному напрямку, 20 з передньою частиною важільної групи 11 з використанням упорного підшипника 25. З використанням цього хитного важеля 20 поперечна вісь 12 може переміщатися разом з роликовими колесами 8 щонайменше одним додатковим піднімальним органом, що представляє собою піднімальний циліндр 21 (за двоспрямованою стрілкою N). Рух піднімального циліндра 21 передається на коротке плече 26 хитного важеля 20, перетворюється його радіальним підшипником 27 і передається на упорний підшипник 18, у результаті чого відбувається насамперед зміна положення конструктивного блоку E щодо важільної групи 11 (за двоспрямованою стрілкою N). Як у цілому показано на фіг. 3-5, при симетричності конструкції пристрою 3 поперечна вісь 12 з'єднана на кінцях у місцях розташування радіальних підшипників 27, 27' з важільною групою 11, а передбачені відповідно як з'єднувачі піднімальні органи, виконані у вигляді двох паралельних піднімальних циліндрів 21, 21', взаємодіють із відповідними хитними важелями 20, 20' таким чином, що забезпечують поворотний і встановлювальний рух у напрямку, позначеному двоспрямованою 9 стрілкою N. Цей поворотний рух у напрямку, зазначеному двоспрямованою стрілкою N, регульований системою керування машиною 1, може використатися в найпростішому варіанті для регулювання заглиблення лемешів. Відповідно до винаходу в процесі викопування картоплі можна забезпечити практично будь-яке регулювання піднімальних циліндрів 21, 21'. При цьому зміна положення роликових коліс 8 визначає відповідній глибині викопування картоплі відстань до підкопувальних лемешів 5. На фіг. 4 у вигляді зверху показаний додатковий блок, що копіює, 23, що передбачений як конструктивний вузол для керування підбирачем 3, який накладається на один із гребенів 4 на посадках картоплі, відповідно підкопувальними агрегатами 2, розташованими біля роликових коліс 8. Відповідно до винаходу біля роликових коліс 8 може бути передбачений вимірювальний пристрій 22, з використанням якого можна контролювати й регулювати глибину підкопування підбирача 3. Картоплезбиральна машина 1 виконана для застосування на косогорах таким чином, щоб підбирач 3 мав можливість повертатися незалежно від кабіни оператора, прийомного бункера або інших аналогічних конструктивних груп (не показані) у напрямку, зазначеному двоспрямованою стрілкою W (фіг. 3) щодо середньої поздовжньої площини М. При цьому оператор машини може здійснювати вручну керування переміщенням у напрямку F відповідно до профілю гребенів 4 на посадках картоплі. Вимірювальний пристрій 22 дозволяє також контролювати цей процес або управляти ним, завдяки чому можна оптимізувати керування машиною 1 у бічному напрямку шляхом використання відповідного сигналу виміру, прийнятого від вимірювального пристрою 22. Для забезпечення цього практично автоматичного центрування на гребені на посадках картоплі можна також використати пропоновані у винаході роликові колеса 8. При цьому як вхідний параметр можна 93866 10 використати величину, що змінюється, діючих у напрямку S, S' (фіг. 1) зусиль, а з використанням відповідних датчиків (не показані), розташованих у зоні бічних хитних важелів 20, 20', можна вимірювати відповідні бічні зусилля або навантаження й шляхом їхньої мінімізації можна оптимально проводити підбирач 3 відповідно до профілю гребенів 4 на посадках картоплі. На фіг. 6 і 7 показаний виконаний ще за будьяким варіанті підбирач 3, що обладнаний розташованим у зоні знаходження обох зовнішніх роликових коліс 8" позначеним загальною позицією 28 ріжучим органом (фіг. 5 - плужний диск 28' як ріжучий орган). У кращому варіанті як ріжучий орган 28 передбачений ріжучий елемент 29 (фіг. 6), що з'єднує безпосередньо з роликовими колесами 8", у результаті чого його ріжуча дія забезпечується безпосередньо шляхом додавання тиску, відповідно під дією ваги за стрілкою А (фіг. 2). Ріжучий елемент 29 зрізує виступаючі із крайньої борозни частини рослин, такі як картопляне бадилля й т.д. Як наочно показано в аксонометрії на фіг. 7, як ріжучий елемент 29 передбачена насамперед складена кільцева шайба 31. що утворює ріжучу крайку 30. Ця кільцева шайба 31 з'єднана безпосередньо з краєм відповідного роликового колеса 8", при цьому кільцеву шайбу можна розташовувати рівним чином по центру на роликовому колесі 8" (не показане). Відповідно до іншого варіанта виконання цих роликових коліс 8" з ріжучим органом 28 можна забезпечити регульовану установку в поперечному напрямку в необхідному положенні безпосередньо роликових коліс 8" і/або функціонально пов'язаного з ними ріжучого органа 28 в осьовому напрямку траверси 15, відповідно в напрямку поперечної осі 12 за рахунок використання відповідного кріплення (не показане), завдяки чому можна оптимально налагоджувати підбирач 3 відповідно до умов збирання врожаю. 11 93866 12 13 93866 14 15 93866 16 17 93866 18 19 93866 20 21 Комп’ютерна верстка А. Крулевський 93866 Підписне 22 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPotato-harvesting machine
Автори англійськоюKalverkamp Klemens
Назва патенту російськоюКартофелеуборочная машина
Автори російськоюКальверкамп Клеменс
МПК / Мітки
МПК: A01D 17/00
Мітки: картоплезбиральна, машина
Код посилання
<a href="https://ua.patents.su/11-93866-kartoplezbiralna-mashina.html" target="_blank" rel="follow" title="База патентів України">Картоплезбиральна машина</a>
Картоплезбиральна машина з барабанним сепаратором
Номер патенту: 56530
Опубліковано: 15.05.2003
Автори: Грушецький Сергій Миколайович, Самокиш Михайло Іванович, Бендера Іван Миколайович, Роздорожнюк Петро Іванович
МПК: A01D 17/04
Мітки: сепаратором, машина, барабанним, картоплезбиральна
Формула / Реферат:
1. Картоплезбиральна машина, що містить леміш та барабан, встановлений на рамі, яка відрізняється тим, що леміш виконаний з правосторонньою гвинтовою полицею, яка своїм крилом входить в конусний сепаруючий барабан з боку малої основи.2. Картоплезбиральна машина за п. 1, яка відрізняється тим, що конусний барабан встановлений перпендикулярно напрямку руху картоплезбиральної машини та перекочується по сусідньому рядку.3....
Картоплезбиральна машина з барабанним сепаратором
Номер патенту: 60496
Опубліковано: 15.10.2003
Автори: Бендера Іван Миколайович, Самокиш Михайло Іванович, Грушецький Сергій Миколайович, Роздорожнюк Петро Іванович, Гринчук Анатолій Віталійович
МПК: A01D 19/00
Мітки: картоплезбиральна, машина, барабанним, сепаратором
Формула / Реферат:
1. Картоплезбиральна машина з барабанним сепаратором, яка містить леміш та барабан, встановлений на рамі, яка відрізняється тим, що коритоподібний леміш виконаний з правосторонньою гвинтовою полицею, яка своїм крилом входить в конусний сепаруючий барабан зі сторони малої основи, конусний барабан встановлений перпендикулярно напрямку руху і приводиться в обертання за рахунок зчеплення основи більшого діаметра з ґрунтом, причому величина кута...
Картоплезбиральна машина з барабанним сепаратором
Номер патенту: 66658
Опубліковано: 17.05.2004
Автори: Роздорожнюк Петро Іванович, Бендера Іван Миколайович, Врадин Вадим Віталійович, Грушецький Сергій Миколайович, Самокиш Михайло Іванович
МПК: A01D 17/04
Мітки: барабанним, сепаратором, машина, картоплезбиральна
Формула / Реферат:
1. Картоплезбиральна машина з барабанним сепаратором, що містить леміш та барабан, встановлений на рамі, яка відрізняється тим, що леміш виконаний з правосторонньою гвинтовою полицею, яка своїм крилом входить в конусний сепаруючий барабан зі сторони малої основи.2. Картоплезбиральна машина з барабанним сепаратором за п. 1, яка відрізняється тим, що всередині конусного обертового пруткового барабана поверх пруткових решіток встановлені...
Картоплезбиральна машина з барабанним сепаратором
Номер патенту: 66253
Опубліковано: 15.04.2004
Автори: Врадин Вадим Віталійович, Самокиш Михайло Іванович, Роздорожнюк Петро Іванович, Грушецький Сергій Миколайович, Бендера Іван Миколайович
МПК: A01B 77/00
Мітки: барабанним, машина, сепаратором, картоплезбиральна
Формула / Реферат:
1. Картоплезбиральна машина з барабанним сепаратором, що містить леміш та барабан, встановлений на рамі, яка відрізняється тим, що менша основа барабана встановлена на роликах і обертається на них.2. Картоплезбиральна машина з барабанним сепаратором за п. 1, яка відрізняється тим, що для зчеплення обода більшого діаметра з ґрунтом встановлені два опорні котки.3. Картоплезбиральна машина з барабанним сепаратором за п. 1, яка...
Сільськогосподарська машина

Номер патенту: 34557
Опубліковано: 15.03.2001
Автори: Сисолін Петро Васильович, Середа Леонід Іванович, Сало Василь Михайлович, Бойченко Сергій Федорович, Ляшенко Анатолій Степанович
МПК: A01B 59/00
Мітки: машина, сільськогосподарська
Формула / Реферат:
Сільськогосподарська машина, що включає раму з робочими органами і механізмом приводу, чотири колеса - два опорних флюгерних і два опорних приводних, яка відрізняється тим, що одна пара коліс - опорне флюгерне і опорне приводне встановлені послідовно на балансирній підвісці, яка з'єднана з рамою шарніром.
Попередній патент: Спосіб виділення металів, таких як золото та платина, з сировини, який включає тонке подрібнення, утворення пульпи та окиснення
Наступний патент: Затискач для з’єднання опалубних щитів
Випадковий патент: Протез на довгу куксу стопи