Система автоматичного контролю юза і буксування шахтного локомотива
Номер патенту: 97569
Опубліковано: 27.02.2012
Автори: Гончар Олексій Євгенович, Проців Володимир Васильович


Формула / Реферат
1. Система автоматичного контролю юза і буксування шахтного локомотива, що включає тяговий двигун, яка відрізняється тим, що містить гідронасос, гідроакумулятор, гідроперетворювач тиску; радарний датчик (1) переносної швидкості пересування локомотива та датчик (5) кутової швидкості обертання тягового двигуна, що з'єднані через узгоджувачі (2 та 4) з обчислювачем (3) відносного ковзання колеса, зв'язаним з елементом АБО (6) порівняння відносного ковзання колеса з позитивним контрольним значенням, вихід ТАК якого пов'язаний з елементом АБО (7) порівняння тривалості часу поточного стану локомотива з контрольним значенням, а його вихід НІ пов'язаний з гідророзподільниками колісно-колодкового та дискового гальм, а вихід ТАК зв'язаний із ще одним елементом АБО (8) порівняння тривалості часу поточного стану локомотива з контрольним значенням, вихід НІ якого зв'язаний з гідророзподільником магніторейкового гальма, а вихід ТАК - з гідророзподільником гравітаційного гальма; вихід НІ елемента АБО (6) порівняння відносного ковзання колеса з позитивним контрольним значенням зв'язаний з входом елемента АБО (9) порівняння відносного ковзання колеса з негативним контрольним значенням, вихід НІ якого зв'язаний з входом елемента І (10), який також пов'язаний з кінцевими електричними вимикачами гідророзподільників колісно-колодкового та дискового гальм, а вихід - з елементом АБО (11) порівняння тривалості часу поточного стану локомотива з контрольним значенням, що з'єднаний з гідророзподільниками колісно-колодкового та дискового гальм; вихід ТАК елемента АБО (9) порівняння відносного ковзання колеса з негативним контрольним значенням зв'язаний з елементом АБО (12) порівняння тривалості часу поточного стану локомотива з контрольним значенням, вихід ТАК якого з'єднаний із зовнішнім блоком (13) регулювання струму двигуна, а вихід НІ пов'язаний з гідророзподільниками колісно-колодкового та дискового гальм; датчик (5) кутової швидкості обертання тягового двигуна через узгоджувач (4) з'єднаний також з обчислювачем (16) відносного ковзання кутового обертання тягового двигуна обох секцій локомотива, а його вихід пов'язаний з елементом АБО (17) порівняння величини відносною ковзання кутової швидкості тягового двигуна з контрольним значенням, далі вихід ТАК елемента АБО (17) зв'язаний з гідрорегуляторами колісно-колодкового та дискового гальм; вказана система містить також датчик подовжнього прискорення (14), з'єднаний через перетворювач (15) з гідрорегуляторами подачі робочої рідини у гальмівні циліндри колісно-колодкового та дискового гальм.
2. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що входи обчислювача (3) відносного ковзання коліс обох секцій локомотива пов'язані між собою.
3. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що входи обчислювача (16) відносного ковзання кутового обертання тягових двигунів обох секцій локомотива пов'язані між собою.
4. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що гідравлічні ланцюги гідрорегуляторів колісно-колодкового та дискового гальм, а також електричні ланцюги гідророзподільників магніторейкового та гравітаційного гальм обох секцій локомотива взаємно пов'язані між собою.
5. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що вихід НІ елемента АБО (7) порівняння тривалості часу поточного стану локомотива з контрольним значенням пов'язаний з гідрорегуляторами колісно-колодкового та дискового гальм, а вихід НІ елемента АБО (11) порівняння тривалості часу поточного стану локомотива з контрольним значенням зв'язаний з гідрорегуляторами колісно-колодкового та дискового гальм.
6. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що гідророзподільник колісно-колодкового та дискового гальм має два вхідні канали та три вихідні, причому у положенні "вимкнено" вхідний канал від насоса сполучений з вихідним каналом до поршня великого тиску гідроперетворювача тиску, а вихідні канали до поршня низького тиску гідроперетворювача тиску та до гальмівних циліндрів сполучені між собою і з'єднані з вхідним каналом гідророзподільника, що зв'язаний із зливним баком гідросистеми; у першому робочому положенні вхідний канал гідророзподільника від насоса сполучений із з'єднаними між собою вихідними каналами до поршня великого тиску гідроперетворювача тиску та до гальмівних циліндрів, а канал до поршня низького тиску гідроперетворювача тиску сполучений вхідним каналом гідророзподільника, що приєднаний до зливного бака гідросистеми; у другому робочому положенні вхідний канал гідророзподільника від насоса сполучений з каналом до поршня низького тиску гідроперетворювача тиску, другий вхідний канал перекритий, а канали до поршня великого тиску гідроперетворювача тиску та до гальмівних циліндрів з'єднані між собою.
Текст
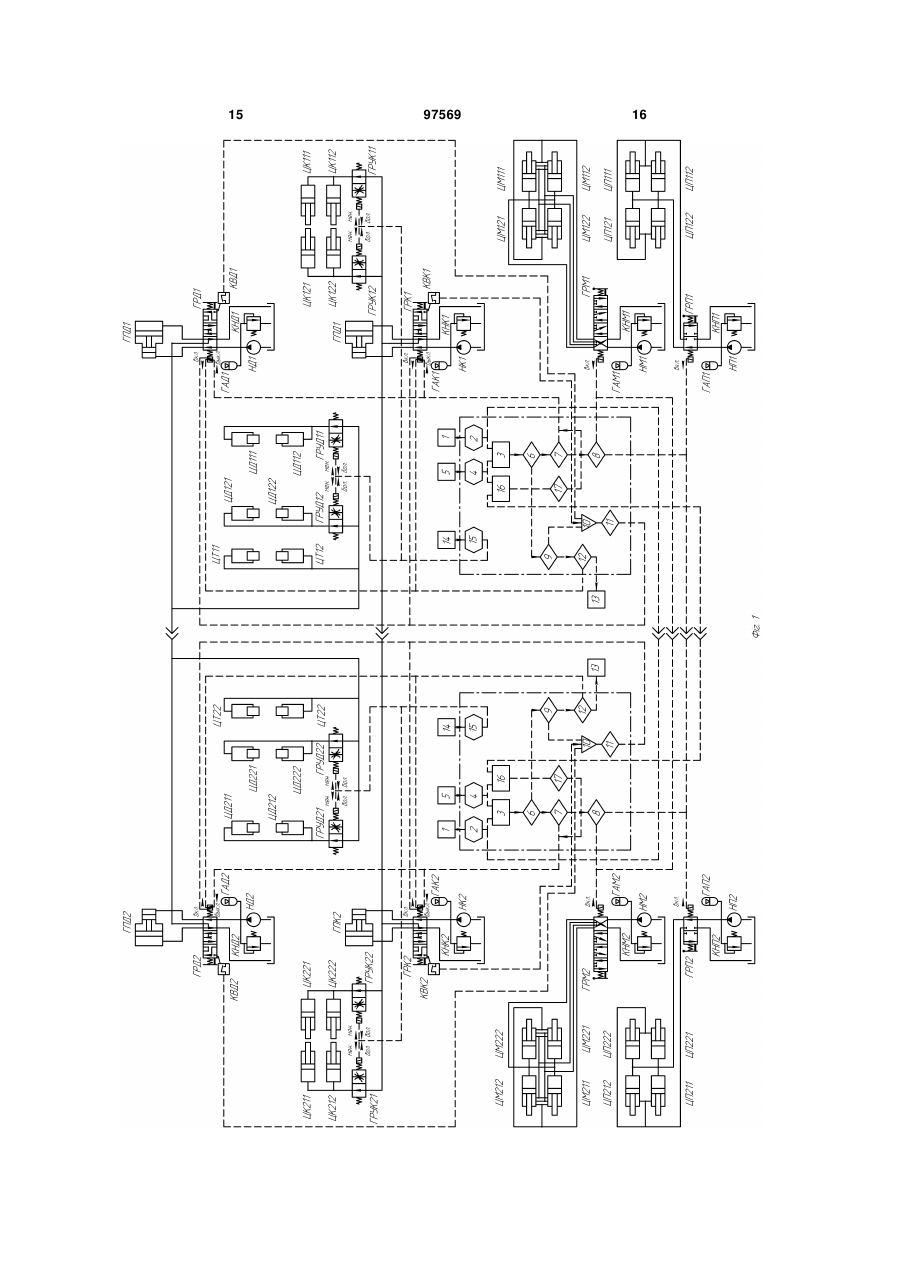
1. Система автоматичного контролю юза і буксування шахтного локомотива, що включає тяговий двигун, яка відрізняється тим, що містить гідронасос, гідроакумулятор, гідроперетворювач тиску; радарний датчик (1) переносної швидкості пересування локомотива та датчик (5) кутової швидкості обертання тягового двигуна, що з'єднані через узгоджувачі (2 та 4) з обчислювачем (3) відносного ковзання колеса, зв'язаним з елементом АБО (6) порівняння відносного ковзання колеса з позитивним контрольним значенням, вихід ТАК якого пов'язаний з елементом АБО (7) порівняння тривалості часу поточного стану локомотива з контрольним значенням, а його вихід НІ пов'язаний з гідророзподільниками колісно-колодкового та дискового гальм, а вихід ТАК зв'язаний із ще одним елементом АБО (8) порівняння тривалості часу поточного стану локомотива з контрольним значенням, вихід НІ якого зв'язаний з гідророзподільником магніторейкового гальма, а вихід ТАК - з гідророзподільником гравітаційного гальма; вихід НІ елемента АБО (6) порівняння відносного ковзання колеса з позитивним контрольним значенням зв'язаний з входом елемента АБО (9) порів 2 (19) 1 3 97569 4 гніторейкового та гравітаційного гальм обох секцій локомотива взаємно пов'язані між собою. 5. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що вихід НІ елемента АБО (7) порівняння тривалості часу поточного стану локомотива з контрольним значенням пов'язаний з гідрорегуляторами колісно-колодкового та дискового гальм, а вихід НІ елемента АБО (11) порівняння тривалості часу поточного стану локомотива з контрольним значенням зв'язаний з гідрорегуляторами колісно-колодкового та дискового гальм. 6. Система автоматичного контролю юза і буксування шахтного локомотива за п. 1, яка відрізняється тим, що гідророзподільник колісноколодкового та дискового гальм має два вхідні канали та три вихідні, причому у положенні "вимкнено" вхідний канал від насоса сполучений з вихідним каналом до поршня великого тиску гідропе ретворювача тиску, а вихідні канали до поршня низького тиску гідроперетворювача тиску та до гальмівних циліндрів сполучені між собою і з'єднані з вхідним каналом гідророзподільника, що зв'язаний із зливним баком гідросистеми; у першому робочому положенні вхідний канал гідророзподільника від насоса сполучений із з'єднаними між собою вихідними каналами до поршня великого тиску гідроперетворювача тиску та до гальмівних циліндрів, а канал до поршня низького тиску гідроперетворювача тиску сполучений вхідним каналом гідророзподільника, що приєднаний до зливного бака гідросистеми; у другому робочому положенні вхідний канал гідророзподільника від насоса сполучений з каналом до поршня низького тиску гідроперетворювача тиску, другий вхідний канал перекритий, а канали до поршня великого тиску гідроперетворювача тиску та до гальмівних циліндрів з'єднані між собою. Винахід належить до галузі шахтного рейкового транспорту. Відомий електропневматичний клапанний орган протиюзного пристрою залізничного транспортного засобу, що має корпус, який містить електромагнітний вентиль перекривання та електромагнітний вентиль випуску. Рухома перегородка з клапаном закріплена в корпусі. Вентиль має клапанну порожнину, клапан, атмосферний отвір. Клапан перекриває канал. Канал пов'язаний з розподільником повітря. Порожнина над перегородкою сполучається з клапанною порожниною. Порожнина під перегородкою пов'язана з каналом з розподільником повітря. Порожнина під перегородкою з'єднана з каналом і через канал - з гальмівним циліндром. Вентиль має клапанну порожнину, клапан, атмосферний отвір. Канал перекривається клапаном і зв'язує порожнину над перегородкою з клапанною порожниною. Дросель пов'язує порожнину з каналом. Клапан перекриває атмосферний канал. Пружина впливає на перегородку (RU 2098300, Патент РФ, кл. В60Т8/38, публікація 10.12.1997). Вказаний пристрій дозволяє швидко скинути тиск в гальмівних циліндрах при виникненні юза колісних пар, проте він не здатний запобігти буксуванню. Відомий пристрій виявлення граничних по зчепленню режимів роботи тягового приводу рейковою транспорта, що містить датчик коливань механічної частини приводу колісної пари, смуговий фільтр, налаштований на інформативний частотний діапазон, і ланцюги формування рівня сигналу, що відрізняється тим, що ланцюг формування рівня сигналу виконаний у вигляді аналогоцифрового перетворювача і підключених до нього через фільтр блоків формування еталонного іпоточного рівнів сигналу та відповідних їм статистичних характеристик за малий і великий час реалізації режиму тяги, при цьому виходи блоків формування рівнів сполучені з входами блока порівняння, що виконує функцію порогового пристрою і класифікації динамічних режимів роботи тягового приводу, причому блок формування еталонного рівня сигналу підключений до виходу фільтра і до власного виходу через перемикач, керований логічним сигналом з виходу блока порівняння. (RU 2175612, Патент РФ, кл. B60L3/10, публікація 10.11.2001). Принцип роботи пристрою заснований на здатності реагувати на динамічні процеси в тяговому приводі, характерні тільки для тих умов, коли колісна пара досягає межі по зчепленню коліс з рейкою і потім переходить в режим буксування. Проте використані непрямі методи, до того ж неможливе визначення моменту переходу локомотива в юз. Відомий, також, пристрій для регулювання сили тяги засобу електротранспорту, що містить регулятор швидкості, входи якого сполучені з виходами задавача швидкості і блока виділення мінімальної швидкості, пов'язаного з датчиками частоти обертання колісних пар, селектор мінімального сигналу, входи якою підключені до виходів регулятора швидкості і задавача сили тяги, а вихід - до основного входу регулятора електродвигунів, встановленого в ланцюгах їх живлення, що відрізняється тим, що в нього введені встановлений на автозчепленні тензометричний датчик сили тяги, два диференціатори і блок антизбігу знаків похідних, причому вхід одного диференціатора сполучений з виходом датчика сили тяги, а вхід іншого диференціатора - з виходом задавача електродвигунів, входи блока антизбігу знаків похідних підключені до виходів диференціаторів, а вихід - до додаткового входу задавача електродвигунів (RU 2013232, Патент РФ, кл. B60L15/20, публікація 30.05.1994). Не дивлячись на певні переваги, вказаний пристрій не дозволяє гарантовано визначати момент часу, передуючий початку буксування. Така конструкція не дає можливості запобігати появі юза при гальмуванні шахтного локомотива на ухилах колії до 50 ‰. Задачею пропонованого винаходу є удосконалення систем тяги і гальмування шахтних локомотивів для отримання можливості безпечного пере 5 міщення вантажів по шахтній рейковій колії з ухилом до 50 ‰. Поставлена задача розв'язується таким чином У систему автоматичною контролю юза і буксування шахтного локомотива, що містить тяговий двигун, гідронасос, гідророзподільник, гідроплунжер і гідроциліндр, включені датчик кутової швидкості обертання тягового двигуна, радарний датчик швидкості пересування локомотива і обчислювально-логічний блок, при цьому останній включає обчислювач відносного ковзання колеса і відносної кутової швидкості тягового двигуна локомотива, а також елемент АБО порівняння відносного ковзання колеса з контрольним значенням. Крім того, вказаний обчислювально-логічний блок включає елемент АБО порівняння відносної кутової швидкості тягового двигуна локомотива, а також елемент АБО порівняння тривалості часу поточного стану локомотива з контрольним значенням і датчик подовжнього прискорення локомотива. Система містить також сполучені між собою гідроперетворювач тиску і датчик подовжнього прискорення локомотива. Додатково система містить датчики положення гідророзподільника і гідроперетворювач тиску. Суть винаходу пояснюється наступними ілюстраціями. Фіг. 1 - Електрогідравлічна схема системи автоматичного контролю юза і буксування шахтного локомотива (варіант перший для шарнірнозчленованого двосекційного локомотива); фіг. 2 - Схема підключення ГПД (гідроперетворювача тиску дискового гальма); фіг. 3 - Електрогідравлічна схема системи автоматичного контролю юза і буксування шахтного локомотива (варіант другий для шарнірнозчленованого двосекційного локомотива). Система автоматичного контролю юза і буксування шахтного локомотива, представлена на схемі (див. фіг. 1 та 3) для шарнірно-зчленованого локомотива, що складається з двох двовісних тягових секцій з груповим приводом колісних пар в кожній, виконана з двох частин, що з'єднуються між собою штекерними та штуцерними роз'ємами. Позначення гідравлічних елементів складаються з літерної та цифрової частини, для літерних прийняті наступні позначення: ЦТ - гідроплунжер дисковою трансмісійного гальма; ЦД - гідроплунжер дискового (осьового та трансмісійного) гальма; ЦК гідроциліндр колісно-колодкового гальма; ЦМ гідроциліндр магніторейкового гальма; ЦП - гідроциліндр підвіски (гравітаційного гальма); ГПД гідроперетворювач тиску дискового гальма; ГПК гідроперетворювач тиску колісно-колодкового гальма; ГРУД - гідрорегулятор управління дискового гальма; ГРУК - гідрорегулятор управління колісноколодкового гальма; ГРД - гідророзподільник дискового гальма; ГРК - гідророзподільник колісноколодкового гальма; ГРМ - гідророзподільник магніторейкового гальма; ГРП - гідророзподільник підвіски (гравітаційного гальма); ГАД - гідроакумулятор дискового гальма; ГАК - гідроакумулятор колісно-колодкового гальма; ГАМ - гідроакумулятор магніторейкового гальма; ГАП гідроакумулятор підвіски (гравітаційного гальма); 97569 6 НД - гідронасос дискового гальма; НК - гідронасос колісно-колодкового гальма; НМ - гідронасос магніторейкового гальма; НП - гідронасос підвіски (гравітаційного гальма); КНД - клапан напірний дискового гальма; КНК - клапан напірний колісноколодкового гальма; КНМ - клапан напірний магніторейкового гальма; КНП - клапан напірний підвіски (гравітаційного гальма); КВД - кінцевий електричний вимикач гідророзподільника дискового гальма; КВК - кінцевий електричний вимикач гідророзподільника колісно-колодкового гальма. Після літер перша цифра позначення відповідає номеру тягової секції, друга - номеру колісної пари в тяговій секції, а третя - колесу на колісній парі (гідроплунжеру дискового осьового гальма з боку колеса). Позначення електричних елементів мають нижченаведену крізну нумерацію: 1 - радарний датчик швидкості переміщення рами щодо колії; 2 - перетворювач (узгоджувач) цифрового сигналу; 3 - обчислювач відносного ковзання колеса; 4 - перетворювач (узгоджувач) цифрового сигналу; 5 - датчик кутової швидкості обертання тягового двигуна; 6 - елемент АБО (умова) порівняння діючого значення відносного ковзання колеса із заданим позитивним; 7 - елемент АБО (умова) порівняння тривалості часу поточного стану юза локомотива з контрольним значенням; 8 - елемент АБО (умова) порівняння тривалості часу поточного стану юза локомотива з контрольним значенням; 9 - елемент АБО (умова) порівняння діючого значення відносного ковзання колеса із заданим негативним; 10 - елемент І (злиття) сигналів від елемента 7 та кінцевих електричних вимикачів гідророзподільника дискового та колісноколодкових гальм; 11 - елемент АБО (умова) порівняння тривалості часу поточного стану без втрати зчеплення при включеному гальмуванні локомотива контрольним значенням; 12 - елемент АБО (умова) порівняння тривалості часу поточного стану буксування локомотива з контрольним значенням; 13 - блок (зовнішній) управління тяговим двигуном; 14 - датчик подовжнього прискорення руху рами тягової секції локомотива; 15 - перетворювач (узгоджувач) цифрового сигналу в сигнал керування; 16 - обчислювач відносного ковзання кутових швидкостей тягових двигунів; 17 - елемент злиття сигналів кутових швидкостей тягових двигунів. Елементи електричної схеми під номерами 2 - 4, 6 - 12 та 15 - 17 входять до складу обчислювальнологічного блока. Промислова застосовність (варіанти виконання). Система автоматичного контролю юза і буксування шахтного локомотива працює таким чином. Варіант перший. При необхідності службового гальмування (фіг. 1), машиніст шахтного локомотива переводить ГРД1 (першої по ходу руху тягової секції) в перше положення гальмування (натискає на педаль гальма) і/або використовує для цього колісно-колодкове гальмо - включає ГРК1. При цьому включаються дискові і/або колісноколодкові гальма першої та другої тягових секцій. Радарний датчик 1 швидкості переміщення рами відносно колії видає відповідний сигнал, який надходить в перетворювач (узгоджувач) 2, а потім в обчислювач відносного ковзання колеса 3. Туди ж 7 через перетворювач 4 надходить і сигнал від датчика кутової швидкості обертання тягового двигуна 5, розташованого на осі двигуна або в трансмісії. Датчик кутової швидкості обертання тягового двигуна може бути виконаний відомим чином у вигляді синхродиска з радіальними зубцями та індукційного генератора імпульсів, що видає «сплеск» у момент проходу зубця диска крізь торець індукційного датчика. Радарний датчик може бути виконаний відомим чином у вигляді ультразвукового або лазерного доплерівського радара. Обчислене в елементі 3 значення підносного ковзання коліс, кінематично пов'язаних з тяговим двигуном, передається на вхід елемента АБО 6, де воно порівнюється із заданим допустимим (наприклад плюс 2,5 %). Відносне ковзання колеса це відношення різниці переносної швидкості рами секції локомотива і окружної швидкості обертання колеса до переносної швидкості рами секції локомотива. Якщо допустиме значення перевищене (почався юз), то сигнал піде з виходу ТАК елемента АБО 6 на вхід елемента 7, який перевіряє, чи не перевищила тривалість часу поточного стану юза локомотива контрольне значення (наприклад, 2,5 с). Поки час не перевищений, гальмування (дисковими і/або колісно-колодковими гальмами) зменшиться (сигнал з виходу НІ елемента АБО 7 відключить ГРД і/або ГРК) обох тягових секцій і юз припиниться. Як тільки юз зникне, знову включаться ГРД і/або ГРК (оскільки педаль гальма залишається натиснутою) і гальмівний момент збільшиться. Відносне ковзання може кілька разів знижуватися до прийнятного значення і знову зростати, при цьому діюче значення гальмівного моменту встановиться на максимально можливому, але й одночасно найбільш ефективному рівні. Якщо все ж таки контрольне значення часу буде перевищене (юз не припиниться), то з виходу ТАК елементу АБО 7 сигнал піде на вхід елемента АБО 8, з виходу НІ якого буде поданий сигнал на підключення магніторейкових гальм (включиться ГРМ). А після спрацьовування елементу АБО 8 (наприклад, ще через 2,5 с) з його виходу ТАК піде сигнал на включення екстреного гальмування гравітаційним гальмом (включиться ГРП) шляхом опускання рами локомотива на гідроциліндрах підвіски до торкання гальмівних колодок гравітаційних гальм рейкових ниток. Локомотив зупиниться. Описана вище робота системи можлива і у випадку, якщо машиніст локомотива, усвідомлюючи серйозну небезпеку, ухвалить рішення про екстрене гальмування з повною зупинкою потяга і перемкне ГРД (і/або ГРК) в перше робоче положення (середнє). Навіть якщо в цьому випадку елемент АБО 6 видасть повідомлення на вихід НІ, що відповідає гальмуванню без втрати зчеплення (юза немає, оскільки рейки сухі та чисті), то елемент АБО 9 порівняння діючого значення відносного ковзання колеса із заданим негативним перевірить, чи нe настало буксування (див. нижче). І оскільки воно відсутнє, то сигнал з його виходу НІ надійде на елемент ПО, де він зіллється з сигналами від кінцевих електричних вимикачів гідророзподільників дискового і/або колісно-колодкового 97569 8 гальм (ГРД і/або ГРК включені). Оскільки всі необхідні сигнали будуть присутні, то елемент АБО 11 (порівняння тривалості часу поточного стану без втрати зчеплення при включеному гальмуванні локомотива) перевірить, чи не сплинув контрольний час (наприклад, 1 с) з тієї миті, як зник юз при включеному гальмуванні. Цей час необхідний для того, щоб переконатися, що юз не розпочався знову. І якщо юз не поновився, то він подасть сигнал з виходу ТАК на включення гідроперетворювача тиску ГПД і/або ГПК (включить ГРД і/або ГРК у друге робоче положення), що збільшить тиск в трубопроводах гальмівної системи і, відповідно, гальмівні моменти дискових і/або колісноколодкових гальм. На сухій та чистій колії це скоротить гальмівний шлях. Але, якщо забрудненість рейок збільшиться і відносне ковзання перевищить допустиме значення, то включаться магніторейкові та гравітаційні гальма, як це було описано вище. У випадку, якщо в режимі тяги машиніст локомотива задасть дуже великий електричний струм тягового двигуна і виникне буксування, то система відреагує на це таким чином. Елемент АБО 6 визначить, що відносне ковзання не перевищує допустимого позитивного значення (режим, що найбільш часто зустрічається) і подасть з виходу HI сигнал на елемент АБО 9. А він зреагує на значення відносного ковзання нижче заданого допустимого (наприклад, мінус 2,5 %) і подасть сигнал з виходу ТАК на елемент АБО 12, який перевірить, чи не перевищила тривалість часу поточного стану буксування локомотива контрольне значення (наприклад, 2,5 с). Поки чає не перевищений, сигналом з виходу НІ включається підгальмовування дисковими і колісно-колодковими гальмами (включиться ГРД і ГРК) обох тягових секцій. Швидкість кочення коліс знизиться, а відносне ковзання зросте до нормального значення, оскільки зайвий тяговий момент згаситься прикладеним гальмівним моментом. Як тільки буксування зникне тяговий момент знову зросте (на тяговий двигун продовжує подаватися електроживлення). Відносне ковзання може кілька разів підніматися до прийнятного значення і знову падати, при цьому діюче значення тягового моменту встановиться на максимально можливому, але й одночасно найбільш ефективному. Як тільки контрольне значення часу буде перевищене, сигнал з виходу ТАК елемента АБО 12 поступить на зовнішній блок 13 регулювання струму двигуна, який відомим чином понизить струм тягових двигунів до значення, найбільш відповідного для конкретної дорожньої ситуації. Локомотив розвиватиме найбільшу можливу для конкретних умов забрудненості рейкової колії силу тяги. Якщо гальма не включені, то локомотив рухатиметься в режимі тяги і ніяких дій ні на гальмівні пристрої, ні на тягові двигуни система не надаватиме (найбільш поширений тривалий режим). Робота гідрорегулятора управління дискового осьового гальма (ГРУД) та гідрорегулятора управління колісно-колодкового гальма (ГРУК), зводиться до того, щоб за рахунок його перемикання в положення регульованого гідродроселя плавно прикласти тиск до гальмівних плунжерів і гідроци 9 ліндрів, а також зробити це пропорційно величині подовжнього прискорення (уповільнення), оскільки час прикладення гальмівного моменту і функція його від часу суттєво впливають на можливість зриву зчеплення при екстреному гальмуванні. Тому, сигнал від датчика подовжнього прискорення 14 через перетворювач 15 постійно подається на ГРУД и ГРУК. Із збільшенням уповільнення гальмівний момент зменшується. Одночасно залежно від величини уповільнення на передні по ходу руху колеса (колеса першої колісної пари кожної тягової секції) прикладається більший момент, ніж на колеса другої колісної пари, оскільки перші колеса довантажуються, а задні розвантажуються при гальмуванні. Для раннього виявлення початку юза на другій тяговій секції в режимі гальмування, в кожній тяговій секції локомотива присутній обчислювач 16 відносного ковзання кутових швидкостей тягових двигунів, який одержує сигнали про величину кутових швидкостей обертання тягових двигунів обох секцій. Результат обчислення надходить на елемент АБО 17, що порівнює величину відносного ковзання кутового обертання тягового двигуна другої за ходом руху тягової секції з контрольним значенням (наприклад, 50 %). Відносне ковзання кутового обертання тягового двигуна - це відношення різниці кутової швидкості обертання тягового двигуна першої секції і кутової швидкості обертання тягового двигуна другої секції до кутової швидкості обертання тягового двигуна першої секції. У разі перевищення вказаного відносного ковзання в режимі гальмування встановленого контрольного значення, з виходу ГАК елемента АБО 17 виходить сигнал на ГРД і/або ГРК, чи, як варіант, ГРУД і/або ГРУК. Гальмування дисковими і колісно-колодковими гальмами другої тягової секції відключається і юз припиняється. Гідроперетворювач тиску дискового гальма (ГПД) і гідроперетворювач тиску колісноколодкового гальма (ГПК) працюють таким чином (на прикладі одного з ГПД, як це видно з фіг. 2). У вимкненому положенні гідророзподільника ГРД (машиніст не натискає на педаль гальма) з напірної магістралі гідронасоса (НД) робоча рідина надходить в порожнину а ГПД (поршня великого тиску) і його шток з поршнями починає переміщатися вліво до упору. В цей час рідина з порожнини б (поршня низького тиску), а також з магістралі 1 гідроциліндрів та гідроплунжерів витікає в бак. При натисненні машиністом локомотива на педаль гальма (гідророзподільника) або подачі електричного сигналу від системи автоматичного контролю юза і буксування на електрокотушку соленоїда ГРД через елекрокабель 2. ГРД перемкнеться в перше робоче (середнє) положення. Тепер робоча рідина з напірної магістралі гідронасоса (НД) потрапить до гальмівних циліндрів і плунжерів, що приведе гальма в дію. При цьому робоча рідина як і раніше надходить в порожнину а ГПД (поршня великого тиску) і його шток з поршнями буде переміщатися вліво до упору (якщо крайнє ліве положення ще не досягнуто), а рідина з порожнини б (поршня низького тиску) витікає в бак. Якщо ж машиніст локомотива для виконання екстреного га 97569 10 льмування ще раз натисне на педаль гальма (переведе ГРД в третє - крайнє праве, тобто друге робоче положення) або від елемента АБО 11 надійне новий сигнал на електрокотушку соленоїда ГРД через електрокабель 2 (у разі потреби збільшення гальмівного моменту), то рідина з напірної магістралі гідронасоса (НД) надійде в порожнину б ГПД (поршня низького тиску), а його шток з поршнями почне переміщатися управо, створюючи підвищений тиск в трубопроводі 1. Тиск робочої рідини збільшиться в стільки разів, в скільки квадрат діаметра поршня порожнини б більше за квадрат діаметра поршня порожнини а. При цьому збільшиться гальмівний момент і, відповідно, гальмівна сила. Оскільки робочі ходи гальмівних гідроциліндрів та гідроплунжерів невеликі (беззазорна конструкція гальмівних колодок), то поршень великого тиску ГПД зупиниться не дійшовши до крайнього правого положення (зберігши запас гідравлічної енергії для декількох гальмувань). При звільненні педалі гальма (ГРД) машиністом локомотива після закінчення гальмування, або при подачі сигналу на електрокабель 3 соленоїда ГПД від елемента АБО 7 (сигнал системи автоматичного контролю юза і буксування про припинення гальмування при появі юза), гідророзподільник ГРД послідовно перейде в середнє і крайнє праве положення «вимкнено», при цьому робоча рідина з напірної магістралі насоса НД знову почне надходити в порожнину а гідроперетворювача тиску (ГПД), а з порожнини б вона витікатиме в бак. ГПД знову готовий до циклу підвищення тиску в трубопроводі І. Напірний клапан дискового гальма (КНД) служить для розвантаження гідронасоса (НД) під час його роботи, коли споживання робочої рідини гальмівною системою відсутнє. Кінцевий вимикач (КВД) замикає контакт і дає сигнал на електрокабель 4, який з'єднаний з елементом І 10 злиття сигналів системи автоматичного контролю юза і буксування при механічному включенні ГРД (натисненні машиністом на педаль гальма). Гідравлічні системи дискових і колісноколодкових гальм тягових секцій зв'язані між собою трубопроводами і штуцерними роз'ємами між відповідними гідрорегуляторами. Системи гальмування магніторейковими і гравітаційними гальмами тягових секцій зв'язані електрично електрокабелями із штекерними роз'ємами. У разі неспрацьовування елемента АБО 8 (сигнал піде з виходу НІ) при необхідності екстреної зупинки потяга, включення електричних котушок соленоїдів гідророзподільника магніторейкового гальма (ГРМ) однієї секції приводить до включення соленоїдів відповідних гідророзподільників іншої секції. Те ж відбувається і в роботі гідророзподільників підвіски (гравітаційного гальма) (ГРП), коли з виходу ТАК елемента АБО 8 надходить відповідний сигнал. Варіант другий. При необхідності службового гальмування (фіг. 3), машиніст шахтного локомотива переводить ГРД1 (першої по ходу руху тягової секції) в перше положення гальмування (натискає на педаль гальма) і/або використовує для цього колісно-колодкове гальмо - включає ГРК1. При цьому включаються дискові і/або колісно 11 колодкові гальма першої і другої тягових секцій. Радарний датчик 1 швидкості переміщення рами відносно колії видає відповідний сигнал, який надходить в перетворювач (узгоджувач) 2, а потім в обчислювач відносного ковзання колеса 3. Туди ж через перетворювач 4 надходить і сигнал від датчика кутової швидкості обертання тягового двигуна 5, розташованого на осі двигуна або в трансмісії. Обчислене в елементі 3 значення відносного ковзання коліс, кінематично пов'язаних з тяговим двигуном, передається в елемент АБО 6, де воно порівнюється із заданим допустимим (наприклад плюс 2,5 %). Якщо допустиме значення перевищене (розпочався юз), то сигнал з виходу ТАК елемента АБО 6 йде на вхід елемента 7, який перевіряє, чи не перевищила тривалість часу поточного стану юза локомотива контрольне значення (наприклад, 2,5 с). Поки час не перевищений, тиск в гальмівній гідросистемі (дискових і колісноколодкових гальм) обох тягових секцій зменшується, гідродроселі гідрорегуляторів управління дискового гальма ГРУД і/або гідрорегуляторів управління колісно-колодкового гальма ГРУК переходять на підвищене дроселювання робочої рідини, тиск в гідросистемі зменшується, гальмівний момент знижується і юз припиняється. Як тільки юз зникне, то від виходу НІ елемента АБО 6 сигнал надходить на елемент АБО 9 порівняння діючого значення відносного ковзання колеса із заданим негативним, який перевірить, чи не настало буксування (див. нижче). І оскільки воно відсутнє, то сигнал надійде на елемент І 10, де він зіллється з сигналами від кінцевих електричних вимикачів гідророзподільників дискового і/або колісно-колодкового гальм (ГРД і/або ГРК включені, бо гальмівна педаль залишається натиснутою). Оскільки всі необхідні сигнали будуть присутні, то елемент АБО 11 (порівняння тривалості часу поточного стану без втрати зчеплення при включеному гальмуванні локомотива) перевірить, чи не сплинув контрольний час (наприклад, 1 с) з тієї миті, як зник юз при включеному гальмуванні. Цей час необхідний для того, щоб з його виходу НІ подати сигнал на збільшення тиску, який надійде на гідродроселі гідрорегуляторів управління дискового гальма ГРУД і/або гідрорегуляторів управління колісно-колодкового гальма ГРУК і переведе їх на знижене дроселювання робочої рідини, тиск в гідросистемі зросте, гальмівний момент дискових і колісно-колодкових гальм обох тягових секцій збільшиться. Відносне ковзання може кілька разів знижуватися до прийнятного значення і знову зростати, при цьому діюче значення гальмівного моменту встановиться на максимально можливому, але й одночасно найбільш ефективному. Якщо все ж таки контрольне значення часу елемента АБО 7 буде перевищене (юз не припиниться), то з його виходу ТАК сигнал піде на вхід елемента АБО 8, через його вихід НІ підключаться магніторейкові гальма (ГРМ), а після спрацьовування елемента АБО 8 (наприклад, ще через 2,5 с) через його вихід ТАК включиться екстрене гальмування гравітаційним гальмом (ГРП) шляхом опускання рами локомотива на гідроциліндрах підвіски 97569 12 до торкання гальмівних колодок гравітаційних гальм рейкових ниток. Локомотив зупиниться. Описана вище робота системи можлива і у випадку, якщо машиніст локомотива, усвідомлюючи серйозну небезпеку, ухвалить рішення про екстрене гальмування з повною зупинкою потяга і перемкне ГРД (і/або ГРК) в перше робоче положення (середнє). Навіть якщо в цьому випадку елемент АБО 6 видасть повідомлення на вихід НІ, що відповідає гальмуванню без втрати зчеплення (юза немає, оскільки рейки сухі та чисті), то елемент АБО 9 порівняння діючого значення відносного ковзання колеса із заданим негативним перевірить, чи не настало буксування (див. нижче). І оскільки воно відсутнє, то сигнал надійде на елемент І 10, де він зіллється з сигналами від кінцевих електричних вимикачів гідророзподільників дискового і/або колісно-колодкового гальм (ГРД і/або ГРК включені). Оскільки всі необхідні сигнали будуть присутні, то сигнал пройде на елемент АБО 11 (порівняння тривалості часу поточного стану без втрати зчеплення при включеному гальмуванні локомотива) перевірить, чи не сплинув контрольний час (наприклад, 1 с) з тієї миті, як зник юз при включеному гальмуванні. Цей час необхідний для того, щоб через його вихід НІ подати сигнал на збільшення тиску, який надійде на гідродроселі гідрорегуляторів управління дискового гальма (ГРУД) і/або гідрорегуляторів управління колісноколодкового гальма (ГРУК) і переведе їх на знижене дроселювання робочої рідини, тиск в гідросистемі зросте, гальмівний момент дискових і колісноколодкових гальм обох тягових секцій збільшиться, і якщо не виникне юз, то елемент АБО 11 через вихід ТАК подасть сигнал на включення гідроперетворювачі тиску ГПД та ГПК (увімкнувши ГРД та ГРК у друге робоче положення), що збільшить тиск в трубопроводах гальмівної системи і, відповідно, гальмівні моменти дискових і/або колісноколодкових гальм. На сухій і чистій колії це скоротить гальмівний шлях. Але якщо забрудненість рейок збільшиться і відносне ковзання перевищить допустиме значення, то включаться магніторейкові та гравітаційні гальма, як це було описано вище. У випадку, якщо в режимі тяги машиніст локомотива задасть занадто великий струм тягового двигуна і виникне буксування, то система відреагує на це таким чином. Елемент АБО 6 визначить, що відносне ковзання не перевищує допустимого позитивного значення (режим, що найбільш часто зустрічається та є тривалим) і подасть сигнал з виходу НІ на елемент АБО 9. А він зреагує на значення нижче заданого допустимого (наприклад мінус 2,5 %) і подасть з виходу ТАК сигнал на елемент АБО 12, який перевірить, чи не перевищила тривалість часу поточного стану буксування локомотива контрольне значення (наприклад, 2,5 с). Поки час не перевищений, з виходу НІ елемента АБО 12 піде сигнал на включення підгальмовування дисковими і колісно-колодковими гальмами (включиться ГРД та ГРК) обох тягових секцій. Швидкість кочення коліс знизиться, а відносне ковзання зросте до нормального значення, оскільки зайвий гальмівний момент згаситься прикладеним гальмівним моментом. Відносне ковзання може 13 кілька разів знижуватися до прийнятного значення і знову зростати, при цьому діюче значення гальмівного моменту встановиться на максимально можливому, але й одночасно найбільш ефективному. Як тільки контрольне значення часу буде перевищене, з виходу ТАК елемента АБО 12 надійде сигнал на зовнішній блок регулювання струму двигуна 13, який знизить струм тягових двигунів до значення, найбільш відповідного для конкретної дорожньої ситуації. Локомотив розвиватиме найбільшу можливу для конкретних умов забрудненості рейкової колії силу тяги. 97569 14 У решті режимів робота системи і її окремих елементів аналогічна першому варіанту. Запропонована система може так само працювати на двовісних локомотивах та на локомотивах індивідуальним і груповим приводом колісних пар. Запропонований винахід дає можливість запобігати появі юза і буксуванню при роботі шахтного локомотива в режимах тяги і гальмування на ділянках колії з ухилом до 50 ‰. Таким чином, запропонована система автоматичного контролю юза і буксування шахтного локомотива істотно відрізняються від відомих. 15 97569 16 17 97569 18 19 97569 20 21 97569 22 Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of automatic control of skidding and slipping of mine locomotive
Автори англійськоюProtsiv Volodymyr Vasyliovych, Honchar Oleksii Yevhenovych
Назва патенту російськоюСистема автоматического контроля юза и буксования шахтного локомотива
Автори російськоюПроцив Владимир Васильевич, Гончар Алексей Евгеньевич
МПК / Мітки
МПК: B60L 15/00, B60T 8/36
Мітки: буксування, шахтного, контролю, система, автоматичного, локомотива, юза
Код посилання
<a href="https://ua.patents.su/11-97569-sistema-avtomatichnogo-kontrolyu-yuza-i-buksuvannya-shakhtnogo-lokomotiva.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного контролю юза і буксування шахтного локомотива</a>
Пристрій для контролю швидкості шахтного локомотива та ковзання його ведучих коліс відносно рейкового шляху
Номер патенту: 50699
Опубліковано: 25.06.2010
Автори: Біліченко Юрій Миколайович, Трухляєв Денис Олександрович, Біліченко Микола Якович, Денищенко Олександр Валерійович
МПК: E21F 13/00
Мітки: швидкості, ковзання, шляху, рейкового, коліс, шахтного, локомотива, відносної, пристрій, ведучих, контролю
Формула / Реферат:
Пристрій для контролю швидкості руху шахтного локомотива та ковзання його ведучих коліс відносно рейкового шляху, що включає датчики обертання ведучих коліс локомотива і неприводного колеса, фіксуючий прилад, який відрізняється тим, що неприводне колесо розташовано на локомотиві з можливістю його фіксації та переміщення у вертикальній площині, фіксуючий прилад виконано у вигляді лічильників електромагнітних імпульсів, датчики обертання коліс...
Магніторейкова гальмівна система шахтного локомотива (варіанти)
Номер патенту: 89445
Опубліковано: 25.01.2010
Автор: Проців Володимир Васильович
МПК: B61H 7/00
Мітки: система, варіанти, магніторейкова, шахтного, локомотива, гальмівна
Формула / Реферат:
1. Магніторейкова гальмівна система шахтного локомотива, що містить рейкове гальмо, що складається з декількох секцій, і гідроциліндр підйому-опускання гальма, яка відрізняється тим, що вона містить коробчасту рамку, у якій на різній відстані від нижнього краю зазначеної рамки і на деякій відстані один від одного з можливістю повороту навколо поперечної осі й переміщення у вертикальній і горизонтальній площинах розміщені щонайменше дві...
Пристрій для контролю швидкості шахтного локомотива та ковзання його ведучих коліс відносно рейкового шляху
Номер патенту: 95353
Опубліковано: 25.07.2011
Автори: Денищенко Олександр Валерійович, Трухляєв Денис Олександрович, Біліченко Юрій Миколайович
МПК: B60T 8/171, E21F 13/02, B61C 15/08
Мітки: швидкості, пристрій, шахтного, шляху, ведучих, ковзання, локомотива, рейкового, контролю, коліс, відносної
Формула / Реферат:
Пристрій для контролю швидкості руху шахтного локомотива та ковзання його ведучих коліс відносно рейкового шляху, що містить датчики обертання ведучих коліс локомотива і неприводного колеса, фіксуючий прилад, який відрізняється тим, що неприводне колесо розташовано на локомотиві з можливістю його фіксації та переміщення у вертикальній площині, фіксуючий прилад виконано у вигляді лічильників електромагнітних імпульсів, датчики обертання коліс...
Пристрій для регулювання навантаження на ведучі осі шахтного локомотива
Номер патенту: 62469
Опубліковано: 25.08.2011
Автори: Денищенко Олександр Валерійович, Юрченко Олег Олегович
МПК: B61C 15/00, B61B 7/00, E21F 13/00
Мітки: шахтного, осі, регулювання, пристрій, навантаження, ведучі, локомотива
Формула / Реферат:
Пристрій для регулювання навантаження на ведучі осі шахтного локомотива, що включає вимірювачі швидкості або пройденого шляху, кожний з яких зв'язаний з відповідною ведучою колісною парою локомотива, керуючий блок, який відрізняється тим, що до нього введено лебідку з приводом, який зв'язаний з керуючим блоком, та тягар з можливістю переміщення у повздовжньому напрямі у разі ковзання однієї з ведучих колісних пар локомотива відносно...
Пристрій для автоматичного контролю буксування валків вальцівного стана
Номер патенту: 30537
Опубліковано: 25.02.2008
Автор: Буряковський Сергій Геннадійович
МПК: B21B 37/00, B21B 38/00
Мітки: буксування, вальцівного, пристрій, автоматичного, валків, контролю, стана
Формула / Реферат:
Пристрій для автоматичного контролю буксування валків вальцівного стана, що містить блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження, який відрізняється тим, що він оснащений блоком визначення режиму прокатки, що включає датчик напруги, компаратор, диференціатор напруги й граничний елемент із...
Попередній патент: Пристрій для управління або регулювання температури заготовки
Наступний патент: Пристрій для формування абсолютної величини сигналу
Випадковий патент: Орбіктрон - генератор дифракційного випромінювання