Система та спосіб позиціонування
Номер патенту: 101991
Опубліковано: 27.05.2013
Автори: Грей Стюарт, Келлар Уільям Джеймс, Робертс Пітер Джеймс, Даше Деміен

Формула / Реферат
1. Спосіб позиціонування, у якому здійснюють етапи:
розраховують менш точне рішення щодо позиціонування;
застосовують зсув до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування є недоступним, причому зсув являє собою різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування у момент часу, коли більш точне рішення щодо позиціонування востаннє було доступним;
безперервно визначають, чи стало більш точне рішення щодо позиціонування знову доступним;
розраховують більш точне рішення щодо позиціонування у разі, якщо більш точне рішення щодо позиціонування стало доступним; та
застосовують зсув повторного отримання до більш точного рішення щодо позиціонування для створення нового остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування знову стало доступним.
2. Спосіб позиціонування за п. 1, у якому зсув повторного отримання являє собою різницю між остаточним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування.
3. Спосіб позиціонування за п. 1, у якому нове остаточне рішення щодо позиціонування повідомляють для контролю спрямування транспортного засобу заданим шляхом.
4. Спосіб позиціонування за п. 1, у якому остаточне рішення щодо позиціонування повідомляють для контролю спрямування транспортного засобу заданим шляхом.
5. Спосіб позиціонування за п. 1, у якому більш точне рішення щодо позиціонування являє собою рішення щодо позиціонування на основі Кінематичної зйомки в Реальному масштабі Часу (RTK).
6. Спосіб позиціонування за п. 1, у якому менш точне рішення щодо позиціонування являє собою рішення щодо позиціонування на основі Відносної Псевдодальності Різниці Фаз (RPDP).
7. Спосіб позиціонування за п. 1, у якому зсув застосовують до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування є ненадійним.
8. Спосіб позиціонування, у якому здійснюють етапи:
розраховують більш точне рішення щодо позиціонування;
розраховують менш точне рішення щодо позиціонування;
оновлюють зсув, причому зсув представляє різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування;
визначають, чи є більш точне рішення щодо позиціонування надійним; та
повідомляють остаточне рішення щодо позиціонування у формі:
застосування зсуву до менш точного рішення щодо позиціонування у разі, коли більш точне рішення щодо позиціонування є ненадійним; та
застосування зсуву повторного отримання до більш точного рішення щодо позиціонування у разі, якщо більш точне рішення щодо позиціонування було визначене як ненадійне, але знову було визначене як надійне.
9. Спосіб позиціонування за п. 8, у якому зсув повторного отримання представляє різницю між остаточним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування.
10. Спосіб позиціонування за п. 8, у якому більш точне рішення щодо позиціонування являє собою RTK.
11. Спосіб позиціонування за п. 8, у якому менш точне рішення щодо позиціонування являє собою RPDP.
12. Система позиціонування для транспортного засобу, яка включає:
модуль більш точного позиціонування, сконфігурований для розрахунку більш точного рішення щодо позиціонування для транспортного засобу;
модуль менш точного позиціонування, сконфігурований для розрахунку менш точного рішення щодо позиціонування для транспортного засобу; та
модуль корекції, який сполучений модулем більш точного позиціонування та модулем менш точного позиціонування, причому модуль корекції сконфігурований для забезпечення остаточного рішення щодо позиціонування для спрямування транспортного засобу заданим шляхом;
причому модуль корекції також сконфігурований для:
підтримання зсуву, який представляє різницю між більш точним рішенням щодо позиціонування та менш точним рішенням щодо позиціонування, доки більш точне рішення щодо позиціонування є надійним;
застосування зсуву до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування у разі, коли більш точне рішення щодо позиціонування стає ненадійним; та
застосування зсуву повторного отримання до більш точного рішення щодо позиціонування у разі, якщо більш точне рішення щодо позиціонування було визначене як ненадійне, але знову було визначене як надійне.
13. Система позиціонування за п. 12, у якій зсув повторного отримання представляє різницю між остаточним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування.
14. Система позиціонування за п. 12, у якій більш точне рішення щодо позиціонування являє собою RTK.
15. Система позиціонування за п. 12, у якій менш точне рішення щодо позиціонування являє собою RPDP.
Текст
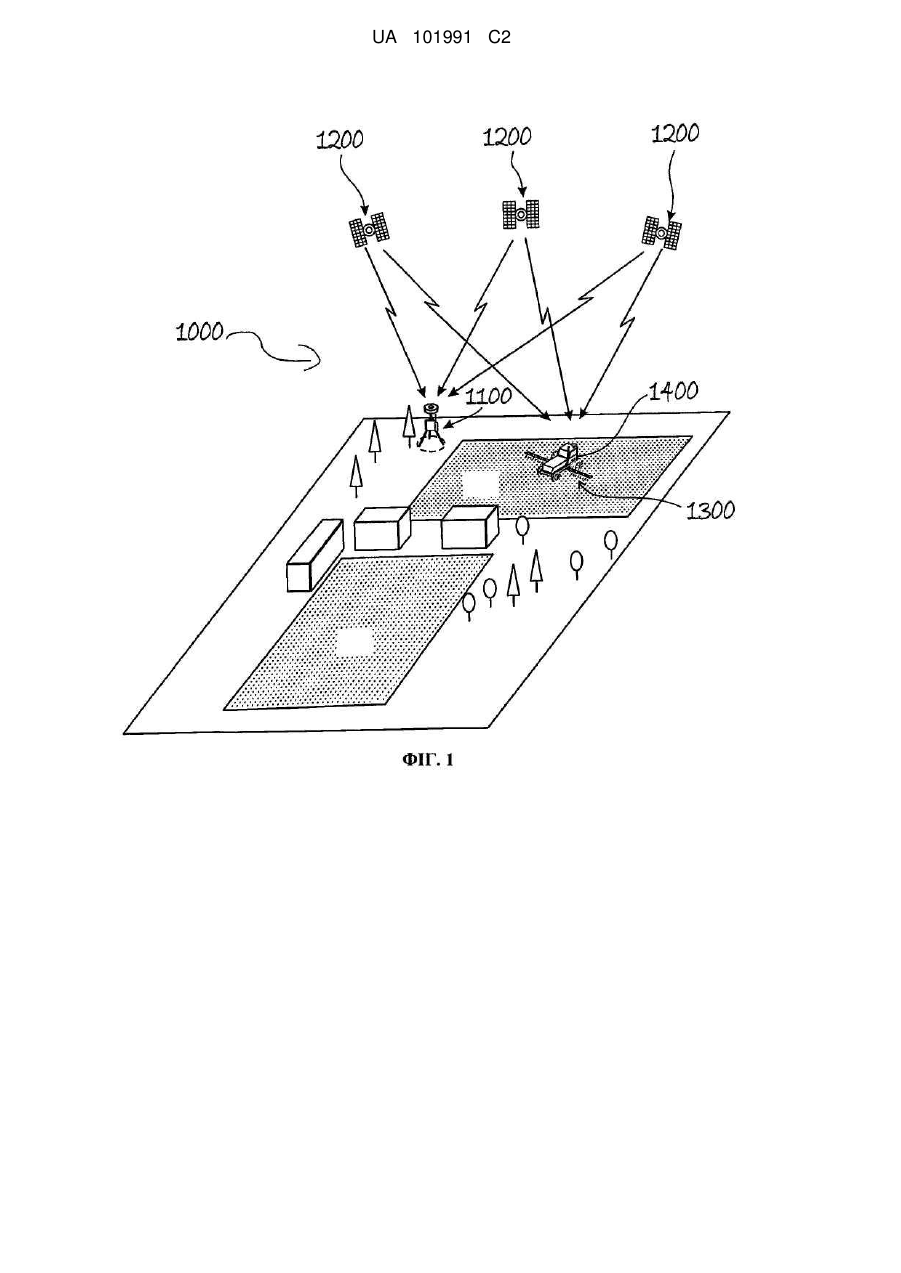
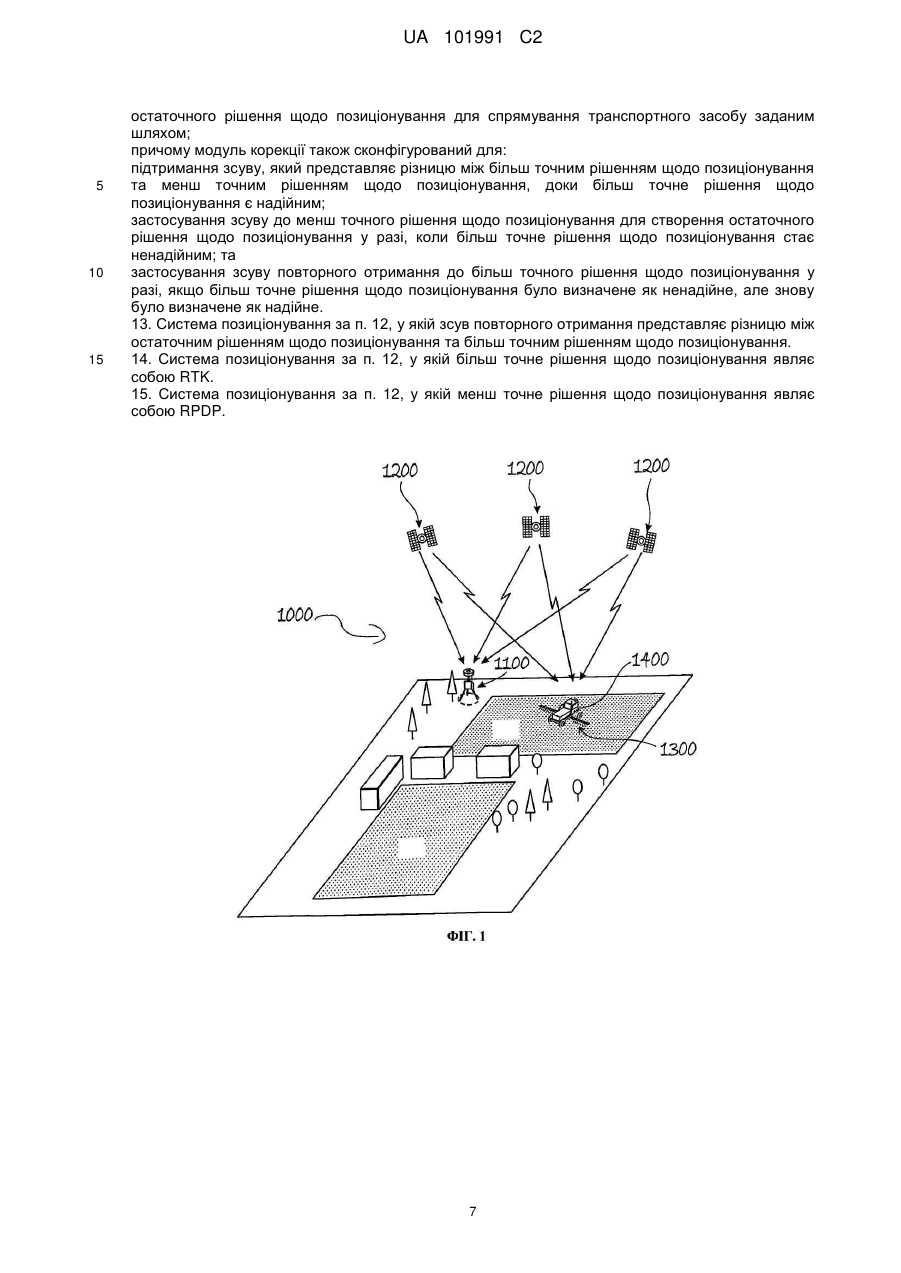
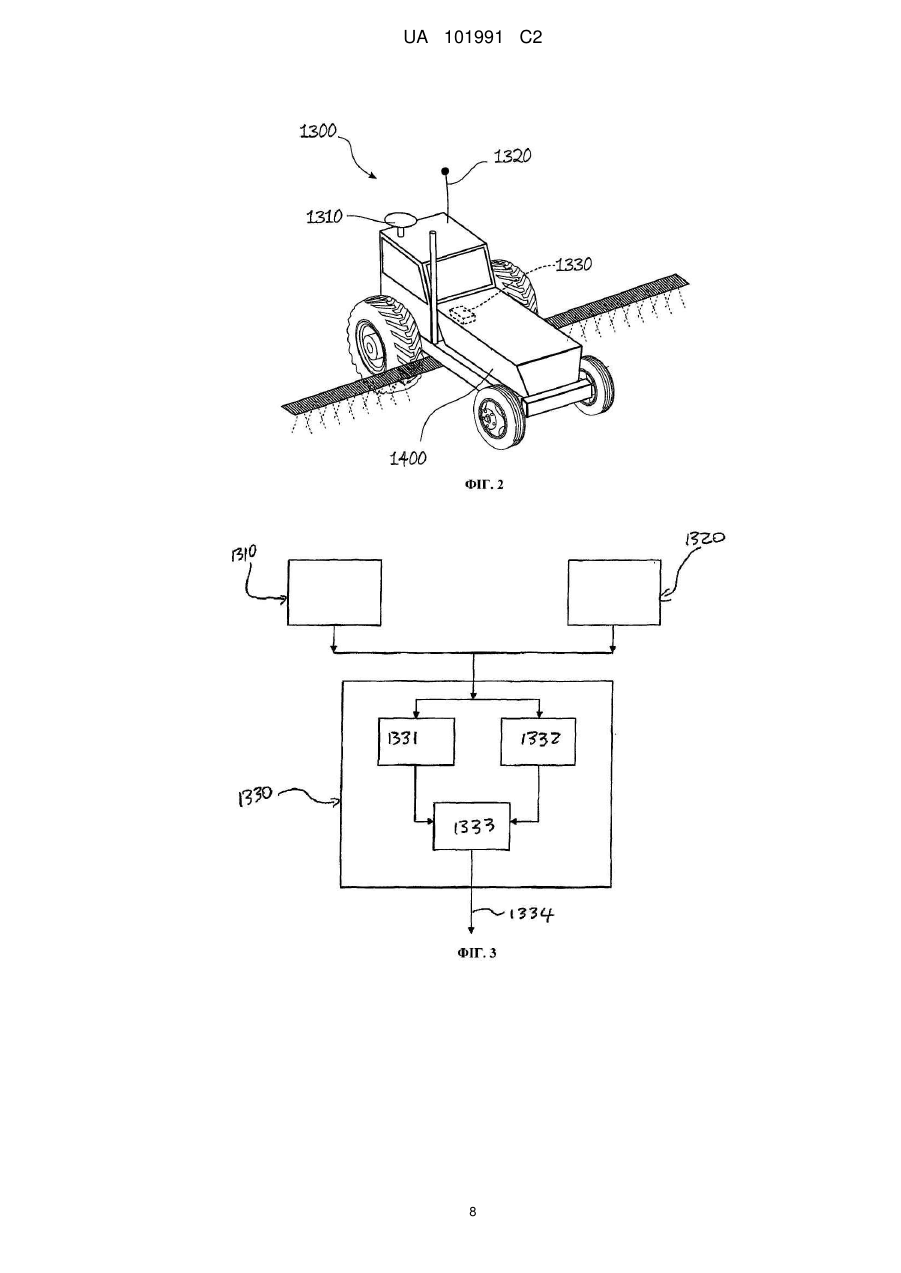
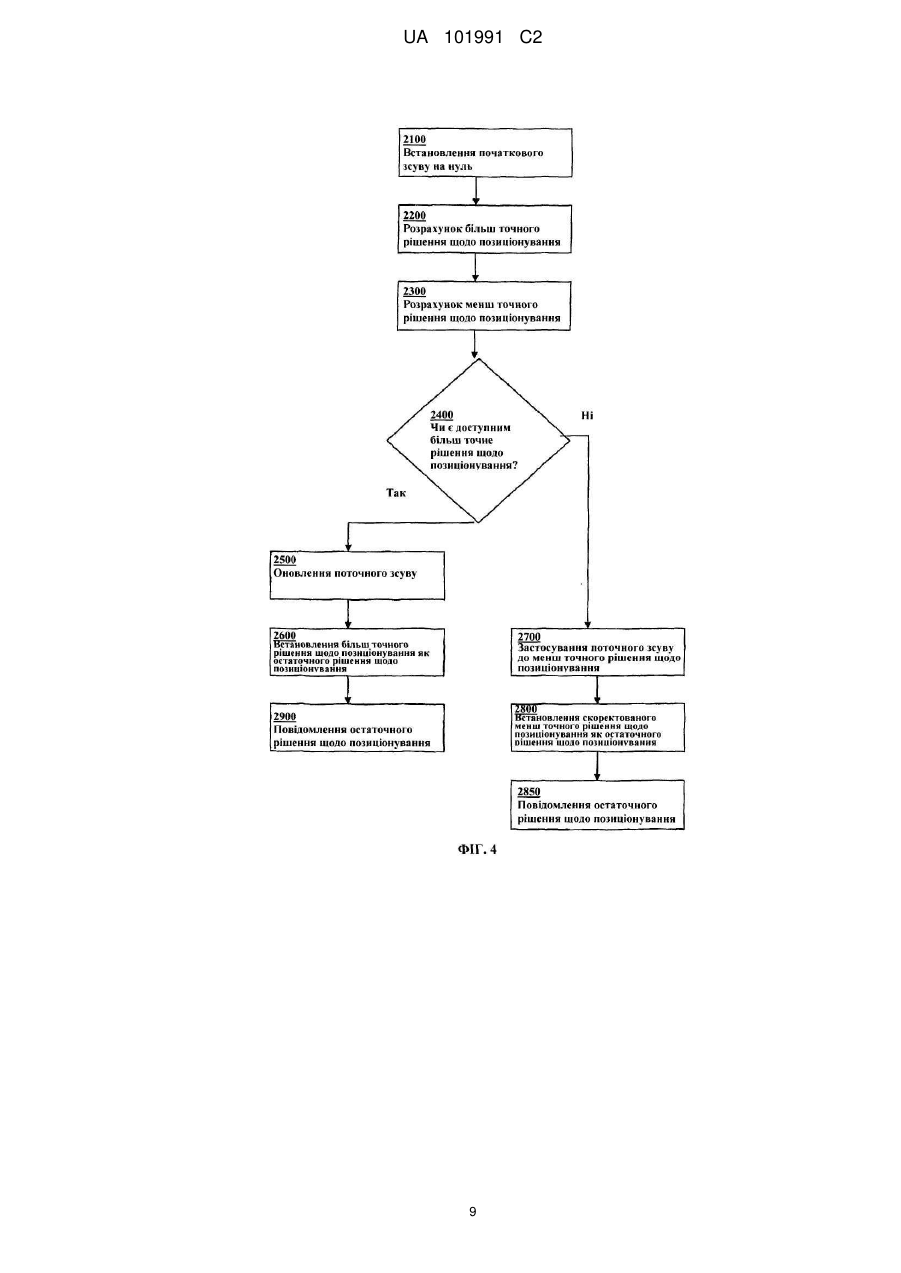
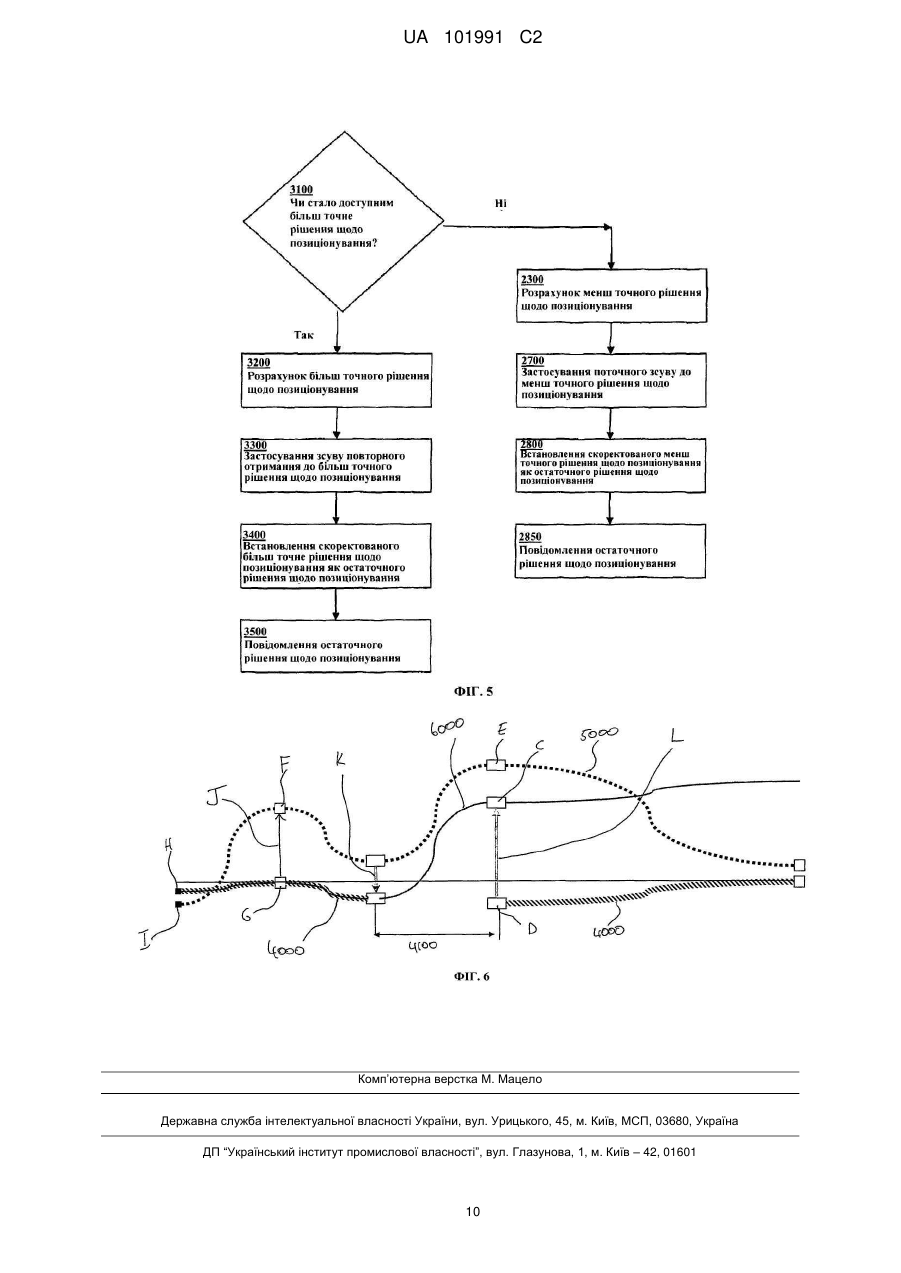
Реферат: Спосіб позиціонування, який дозволяє розраховувати менш точне рішення щодо позиціонування і застосовувати зсув до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування є недоступним. Зсув представляє різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування у момент часу, коли більш точне рішення щодо позиціонування востаннє було доступним. UA 101991 C2 (12) UA 101991 C2 UA 101991 C2 5 10 15 20 25 30 35 40 45 50 55 60 ГАЛУЗЬ ВИНАХОДУ Даний винахід стосується системи та способу позиціонування. Зокрема, винахід стосується способу та системи позиціонування, у якій паралельно застосовують дві або більше методологій розрахунку позиції за допомогою GNSS (глобальної навігаційної супутникової системи). РІВЕНЬ ТЕХНІКИ У багатьох випадках застосовують способи та системи для визначення позиції, наприклад, геодезичного інструмента, транспортного засобу і т. ін., які ґрунтуються на глобальних системах позиціонування, таких, як, наприклад, GPS, GLONASS або європейська система Galileo. В основі цих глобальних навігаційних супутникових систем (GNSS) лежить приймання супутникових сигналів. Вимоги щодо спрямування або навігації транспортних засобів, наприклад, у сільському господарстві, у гірничій галузі, у галузях автомобільних та залізничних перевезень, мають майже непомітні розбіжності з вимогами у геодезії, включаючи значно жорсткішу вимогу постійно наявного позиціонування. Однак можливість забезпечення постійно наявного позиціонування може бути ускладнена. У сільськогосподарській галузі GNSS застосовують для спрямування тракторів, збиральних та інших подібних машин заданим шляхом. Це спрямування може набувати форми механізмів, які прямо контролюють транспортний засіб для утримання транспортного засобу на шляху (тут і далі - системи автоматичного керування), або може набувати форми показу водієві транспортного засобу для сприяння водієві в утриманні транспортного засобу на заданому шляху. Існує багато рішень щодо позиціонування за допомогою GNSS, причому кожне рішення передбачає застосування різних методологій розрахунку. Кожне рішення щодо позиціонування має свій рівень точності та надійності. При застосуванні спрямування транспортних засобів, зокрема, у застосовуваних у сільському господарстві та гірничій галузі системах автоматичного керування, потрібне високоточне рішення щодо позиціонування. Одним з таких рішень є позиціонування в реальному часі (RTK) на основі диференціала фази несучої частоти. Супутникова навігація з застосуванням RTK являє собою спосіб розрахунку позиції на основі застосування вимірювань несучої частоти супутникових сигналів від GPS, GLONASS, Galileo або інших подібних систем, коли одна або кілька станцій забезпечують корекцію у реальному часі для підвищення точності. На практиці у RTK-системах застосовують один або кілька приймачів базової станції та мобільний приймач на кожному транспортному засобі, завдяки чому базова станція передає дані вимірювання фази несучої частоти, а мобільний приймач використовує дані вимірювання фази, отримані з такими передачами від базової(их) станції (станцій). Це дозволяє дуже точно розраховувати відносну позицію транспортного засобу. Однак абсолютна позиція транспортного засобу так само визначається з абсолютною похибкою, яка залежить від базової станції. Помилка позиціонування при застосуванні рішень нижчої точності, таких, як відносна дельта-фаза псевдодальності (RPDP), зазвичай буває значно більшою за помилку при застосуванні рішень вищої точності, таких, як RTK, але засоби нижчої точності часто є більш надійними у плані доступності. Хоча помилки позиціонування при RPDP є більшими, ніж при RTK, вони мають високий ступінь автокореляції і відносно повільно змінюються за короткі періоди часу. Коли більш точне рішення щодо позиціонування стає недоступним, виникає потреба у плавному переході до спрямування з застосуванням менш точного рішення щодо позиціонування, яке має більшу надійність. Однак, оскільки кожне рішення має свої помилки, безпосередня зміна одного рішення на інше в результаті призводить до стрибкоподібної зміни позиції. Зрозуміло, що стрибкоподібна зміна позиції в системі автоматичного керування призводить до різкої зміни курсу, оскільки система позиціонування вважає, що транспортний засіб раптово змінив позицію, і система автоматичного керування внаслідок цього намагається повернутися до заданого шляху. КОРОТКИЙ ОПИС ВИНАХОДУ В одній формі, хоча вона не має бути найширшою формою, винахід полягає у способі позиціонування, який включає етапи: розрахунку менш точного рішення щодо позиціонування; та застосування зсуву до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування є 1 UA 101991 C2 5 10 15 20 25 30 35 40 45 50 55 60 недоступним, причому зсув представляє різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування у момент часу, коли більш точне рішення щодо позиціонування востаннє було доступним. В іншій формі винахід полягає у способі позиціонування, який включає етапи: - розрахунку більш точного рішення щодо позиціонування; - розрахунку менш точного рішення щодо позиціонування; - оновлення зсуву, причому зсув представляє різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування; - повідомлення остаточного рішення щодо позиціонування у формі більш точного рішення щодо позиціонування. У ще одній формі винахід полягає у системі позиціонування для транспортного засобу, причому система позиціонування включає: - більш точний позиціонуючий модуль, сконфігурований для розрахунку більш точного рішення щодо позиціонування для транспортного засобу; - менш точний позиціонуючий модуль, сконфігурований для розрахунку менш точного рішення щодо позиціонування для транспортного засобу; та - коректуючий модуль у сполученні з більш точним позиціонуючим модулем та менш точним позиціонуючим модулем, причому коректуючий модуль є сконфігурованим для забезпечення остаточного рішення щодо позиціонування для спрямування транспортного засобу заданим шляхом; - причому коректуючий модуль також є сконфігурованим для підтримання зсуву, який представляє різницю між більш точним рішенням щодо позиціонування та менш точним рішенням щодо позиціонування, доки більш точне рішення щодо позиціонування є надійним. Інші особливості винаходу стануть зрозумілими з представленого нижче детального опису. КОРОТКИЙ ОПИС ФІГУР Виключно для прикладу оптимальні варіанти втілення винаходу далі описуються докладніше з посиланням на супровідні фігури, серед яких: Фіг. 1 показує схематичне зображення системи позиціонування згідно з варіантом втілення винаходу; Фіг. 2 показує схематичне зображення транспортного засобу, який являє собою частину системи позиціонування, показаної на Фіг. 1; Фіг. 3 показує функціональну схему GPS-приймача, який являє собою частину системи позиціонування, показаної на Фіг. 1; Фіг. 4 показує спосіб позиціонування згідно з варіантом втілення винаходу; Фіг. 5 показує спосіб позиціонування з використанням заново отриманого більш точного рішення щодо позиціонування як остаточного рішення щодо позиціонування, яке являє собою частину способу, показаного на ФІГ. 4; і Фіг. 6 показує приклад застосування способу та системи позиціонування згідно з винаходом. ДЕТАЛЬНИЙ ОПИС ВИНАХОДУ Винахід описується з посиланням на GPS GNSS для спрямування сільськогосподарського транспортного засобу. Однак спеціалістові у даній галузі стане зрозуміло, що система може діяти з застосуванням будь-якої відомої GNSS для будь-якого відомого спрямування. Фіг. 1 показує схематичне зображення системи позиціонування 1000 згідно з варіантом втілення винаходу, за допомогою якої транспортний засіб 1400 використовує GPS для пересування заданим шляхом, а Фіг. 2 показує схематичне зображення транспортного засобу 1400. Система позиціонування 1000 має групу супутників 1200, які утворюють GPS-сукупність, а транспортний засіб 1400 оснащено позиціонуючим пристроєм 1300 у формі GPS-антени 1310, сконфігурованої для приймання зондуючих сигналів від GPS-супутників 1200, та GPS-приймача 1330, сконфігурованого для приймання зондуючих сигналів, отриманих на GPS-антені 1310, і розрахунку рішення щодо позиціонування на їх основі. Зондуючі сигнали, як правило, можуть включати вимірювання псевдодальності та несучої частоти. Крім того, у варіанті втілення базова станція 1100 становить частину системи позиціонування 1000. Базова станція 1100 є сконфігурованою для приймання зондуючих сигналів від супутників 1200, які утворюють GPS-сукупність, та передачі поправкових даних RTK у формі виміряних даних фази несучої частоти на радіоантену 1320 позиціонуючого пристрою 1300. Фіг. 3 показує функціональну схему GPS-приймача 1330 позиціонуючого пристрою 1300. GPS-приймач 1330 має більш точний позиціонуючий модуль 1331, менш точний позиціонуючий модуль 1332 та коректуючий модуль 1333. 2 UA 101991 C2 5 10 15 20 25 30 35 40 45 50 55 60 В оптимальній формі більш точний позиціонуючий модуль 1331, менш точний позиціонуючий модуль 1332 та коректуючий модуль 1333 є програмними модулями, які виконують операції в обчислювальному пристрої GPS-приймача 1330. У цій формі GPSприймач 1330 передбачено у формі відомого GPS-приймача, який має власне програмне забезпечення, у формі більш точного позиціонуючого модуля 1331, менш точного позиціонуючого модуля 1332 та коректуючого модуля 1333, встановлених на ньому. Більш точний позиціонуючий модуль 1331 отримує дані визначення дальності від GPSантени 1310 та поправкові дані від радіоантени 1320. У варіанті втілення більш точний позиціонуючий модуль 1331 розраховує рішення щодо позиціонування для транспортного засобу 1400 з застосуванням RTK. Менш точний позиціонуючий модуль 1332 отримує дані визначення дальності від GPSантени 1310 та, необов'язково, поправкові дані від радіоантени 1320 або через GPS-антену від космічної служби контролю та корекції (SBAS). У варіанті втілення менш точний позиціонуючий модуль 1332 розраховує рішення щодо позиціонування для транспортного засобу 1400 з застосуванням RPDP. Коректуючий модуль 1333 є сполученим з більш точним позиціонуючим модулем 1331 та менш точним позиціонуючим модулем 1332 і отримує рішення щодо позиціонування, розраховане кожним модулем. Коректуючий модуль 1333 забезпечує остаточне рішення щодо позиціонування 1334. Це остаточне рішення щодо позиціонування 1334 може повідомлятися безпосередньо на систему автоматичного керування (не показано) з метою прямого контролю спрямування транспортного засобу 1400 заданим шляхом. В альтернативному варіанті остаточне рішення щодо позиціонування 1334 може повідомлятися на дисплей для інструктування оператора транспортного засобу 1400 стосовно утримання транспортного засобу 1400 на заданому шляху. Функція коректуючого модуля 1333 детальніше описується нижче з посиланням на Фіг. 4. Зрозуміло, що хоча втілення винаходу було описано з посиланням на більш точний позиціонуючий модуль 1331, який здійснює розрахунок RTK-позиції, та менш точний позиціонуючий модуль 1332, який здійснює розрахунок RPDP-позиції, винахід не обмежується цими конкретними методологіями. Винахід поширюється на будь-які методології розрахунку позиції, за допомогою яких більш точний позиціонуючий модуль 1331 здійснює спосіб розрахунку позиції, який має більшу точність, ніж спосіб розрахунку позиції, який здійснюється на менш точному позиціонуючому модулі 1332. Крім того, винахід поширюється на GNSS-методології позиціонування, які не вимагають поправкових даних від базової станції 1400. Фіг. 4 показує спосіб позиціонування 2000 згідно з варіантом втілення винаходу. Система позиціонування 1000 та спосіб позиціонування 2000 згідно з винаходом дозволяють подолати проблеми стрибкоподібної зміни позиції, як було описано вище, коли більш точне рішення щодо позиціонування стає недоступним або ненадійним, через безперервне підтримання зсуву між рішенням щодо позиціонування, розрахованим за більш та менш точними рішеннями щодо позиціонування, і застосування цього зсуву до менш точного рішення щодо позиціонування, коли більш точне рішення щодо позиціонування стає недоступним або ненадійним. Коректуючий модуль 1333 GPS-приймача 1330 підтримує зсув, який представляє різницю у позиції між рішенням щодо позиціонування, розрахованим більш точним позиціонуючим модулем 1331 та менш точним позиціонуючим модулем 1332. Коли GPS-приймач 1330 є увімкненим, коректуючий модуль 1333 обнуляє зсув (етап 2100). Більш точний позиціонуючий модуль 1331 потім розраховує позицію транспортного засобу для забезпечення більш точного рішення щодо позиціонування (етап 2200). Як обговорювалося, у варіанті втілення це здійснюється з застосуванням RTK. Подібним чином менш точний позиціонуючий модуль 1332 після цього розраховує позицію транспортного засобу для забезпечення менш точного рішення щодо позиціонування (етап 2200). Як обговорювалося, у варіанті втілення це здійснюється з застосуванням RPDP. Коректуючий модуль 1333 після цього визначає, чи є більш точне рішення щодо позиціонування наявним або надійним (етап 2400). У варіанті втілення це може відбуватися, наприклад, коли більш точний позиціонуючий модуль 1332 не може розрахувати RTK-рішення, а отже, коректуючий модуль 1333 не отримує рішення щодо позиції від більш точного позиціонуючого модуля 1332. У цьому разі не існує наявного більш точного рішення щодо позиції, і спосіб далі переходить до етапу 2700, як обговорюється нижче. У разі, коли існує наявне більш точне рішення щодо позиціонування, коректуючий модуль 1333 отримує як менш точне рішення щодо позиціонування, так і більш точне рішення щодо позиціонування і оновлює зсув на основі різниці між двома рішеннями (етап 2500). Тобто, зсув, 3 UA 101991 C2 5 10 15 20 25 30 35 40 45 50 55 якщо стосується менш точного рішення щодо позиціонування, перетворює менш точне рішення щодо позиціонування на скоректоване менш точне рішення щодо позиціонування, яке є ідентичним більш точному рішенню щодо позиціонування у конкретний момент часу. Коректуючий модуль 1333 після цього встановлює більш точне рішення щодо позиціонування як остаточне рішення щодо позиціонування 1334 (етап 2600) і повідомляє остаточне рішення щодо позиціонування, яке має використовуватись, як обговорювалося вище (етап 2900). GPS-приймач 1330 після цього здійснює розрахунки позиції для наступного періоду часу, як обговорювалося вище для етапу 2200. У разі, коли коректуючий модуль 1333 визначає, що не існує більш точного рішення щодо позиціонування, наявного на етапі 2400, коректуючий модуль 1333 застосовує поточний зсув до менш точного рішення щодо позиціонування для створення скоректованого рішення щодо позиціонування (етап 2700), і скоректоване рішення щодо позиціонування встановлюється як остаточне рішення щодо позиціонування 1334 (етап 2800). Коректуючий модуль 1333 після цього повідомляє остаточне рішення щодо позиціонування (етап 2850), яке має використовуватись, як обговорювалося вище. Оскільки поточний зсув розраховується на основі різниці між більш точним рішенням щодо позиціонування та менш точним рішенням щодо позиціонування в останній період, коли обидва рішення є доступними, скоректоване рішення щодо позиціонування, у період безпосередньо після втрати або ненадійності більш точного рішення щодо позиціонування, не піддається стрибкоподібній зміні позиції, як відомо спеціалістам у даній галузі. У такий спосіб GPS-приймач 1330 може продовжувати спрямовувати транспортний засіб заданим шляхом з використанням менш точного рішення щодо позиціонування без раптових стрибкоподібних змін позиції через раптову зміну рішень щодо позиціонування. Оскільки менш точні рішення щодо позиціонування демонструють більший зсув стосовно помилок позиціонування у часі, бажано використовувати більш точне рішення щодо позиціонування як остаточне рішення щодо позиціонування 1334, коли більш точне рішення щодо позиціонування знову стає доступним. Фіг. 5 показує спосіб 3000 позиціонування з використанням заново отриманого більш точного рішення щодо позиціонування як остаточного рішення щодо позиціонування 1334. Коректуючий модуль 1333 безперервно визначає, чи є більш точне рішення щодо позиціонування знову доступним (етап 3100). У разі, якщо ні, виконуються етапи 2300, 2700, 2800 та 2850, як обговорювалося вище. У разі, коли більш точне рішення щодо позиціонування знову стає доступним або надійним, більш точний позиціонуючий модуль 1331 розраховує позицію (етап 3200), як обговорювалося вище, і повідомляє її на коректуючий модуль 1333. Коректуючий модуль 1333 після цього застосовує зсув повторного отримання до розрахованого більш точного рішення щодо позиціонування для створення скоректованого більш точного рішення щодо позиціонування (етап 3300). Зсув повторного отримання є різницею між остаточним рішення щодо позиціонування у поточний період та розрахованим більш точним рішенням щодо позиціонування. Як обговорювалося, цей зсув застосовується до більш точного рішення щодо позиціонування для створення скоректованого більш точного рішення щодо позиціонування. Таким чином, не відбувається стрибкоподібних змін позиції, коли GPS-приймач 1330 розпочинає розрахунок позиції з використанням більш точного рішення щодо позиціонування, яким у варіанті втілення є RTK. Коректуючий модуль 1333 після цього встановлює скоректоване більш точне рішення щодо позиціонування як остаточне рішення щодо позиціонування 1334 (етап 3400), і це остаточне рішення щодо позиціонування потім повідомляється для використання (етап 3500), як обговорювалося вище. Важливим є те, що зсув повторного отримання потім застосовується до всіх наступних розрахунків рішень щодо позиціонування. Крім того, поточний зсув (тобто, різниця між фактичним більш точним рішенням щодо позиціонування та менш точним рішенням щодо позиціонування, розрахованим у період, який безпосередньо передує моментові, коли більш точне рішення щодо позиціонування стає недоступним) застосовується до всіх розрахунків менш точного рішення щодо позиції. У той час, як менш точне рішення щодо позиції може зсуватися, поки більш точне рішення щодо позиції є недоступним, через його меншу точність, повторне отримання більш точного рішення щодо позиції мінімізує цей зсув і додатково забезпечує мінімізацію відносної похибки. 4 UA 101991 C2 5 10 15 20 25 30 35 40 45 50 55 В альтернативному варіанті після повторного отримання більш точного рішення щодо позиціонування коректуючий модуль 1333 може встановити шлях, що поступово скеровує транспортний засіб знову до більш точного рішення щодо позиції. Цей режим є особливо вигідним, коли різниця між фактичним менш точним рішенням щодо позиціонування та фактичним більш точним рішенням щодо позиціонування є нижчою за заданий зсув. Фіг. 6 показує приклад застосування способу та системи позиціонування згідно з винаходом. Лінія 5000 представляє позицію, розраховану менш точним позиціонуючим модулем 1332, який у варіанті втілення, є RPDP-рішенням. Лінія 4000 представляє позицію, розраховану більш точним позиціонуючим модулем 1331, який у варіанті втілення є RTK-рішенням. Частина 4100 лінії 4000 представляє період, коли більш точне рішення щодо позиціонування є недоступним або ненадійним. Лінія 6000 представляє остаточне рішення щодо позиціонування 1334, яке у варіанті втілення є позицією, яка повідомляється на прикладну програму автоматичного керування і/або показується операторові транспортного засобу 1400 для представлення позиції транспортного засобу 1400. Момент Н та момент І представляють початковий момент для GPS-приймача 1330. Момент Н представляє більш точне рішення щодо позиціонування, розраховане більш точним позиціонуючим модулем 1331, а момент І представляє менш точне рішення щодо позиціонування, розраховане менш точним позиціонуючим модулем 1332. Оскільки більш точне рішення щодо позиціонування у цей момент часу є доступним, спрямування транспортного засобу 1400 здійснюється на основі цього рішення. Момент G представляє більш точне рішення щодо позиціонування, розраховане більш точним позиціонуючим модулем 1331 у наступний період, а момент F представляє менш точне рішення щодо позиціонування, розраховане менш точним позиціонуючим модулем 1332 у цей самий час. Оскільки більш точне рішення щодо позиціонування у цей момент часу є доступним, спрямування транспортного засобу 1400 здійснюється на основі цього рішення. Відстань J представляє поточний зсув між двома рішеннями, і коректуючий модуль 1333 зберігає цей зсув. Подібним чином момент В представляє більш точне рішення щодо позиціонування, розраховане більш точним позиціонуючим модулем 1331 у наступний період, а момент А представляє менш точне рішення щодо позиціонування, розраховане менш точним позиціонуючим модулем 1332 у цей самий час. Відстань k представляє поточний зсув між двома рішеннями, і коректуючий модуль 1333 зберігає цей зсув. Безпосередньо після моменту В коректуючий модуль 1333 визначає, що більш точне рішення щодо позиціонування стало недоступним або ненадійним, і коректуючим модулем 1333 виконуються етапи 2700, 2800 та 2850. Тобто, значення поточного зсуву К застосовується до менш точного рішення щодо позиціонування, розрахованого безпосередньо після моменту А для створення скоректованого менш точне рішення щодо позиціонування, яке встановлюється як остаточне рішення щодо позиціонування 1334, яке використовується для спрямування. Як показано, остаточне рішення щодо позиціонування 1334 між моментами В та С простежує розраховане менш точне рішення щодо позиціонування зі зсувом К. Крім того, як показано, в цьому остаточному рішенні щодо позиціонування не відбувається стрибкоподібних змін позиції в результаті застосування іншої здійснюваної методології позиціонування, а отже, в результаті забезпечується плавний перехід. У моменти С, D та Е коректуючий модуль 1333 визначає, що більш точне рішення щодо позиціонування знову стає доступним або надійним, і, таким чином, здійснюються етапи 3200, 3300, 3400 та 3500. Тобто, зсув повторного отримання застосовується до більш точного рішення щодо позиціонування, розрахованого у момент D, для створення скоректованого більш точного рішення щодо позиціонування, і це рішення встановлюється як остаточне рішення щодо позиціонування 1334, як представлено моментом С. Після цього остаточне рішення щодо позиціонування 1334 простежує фактичне більш точне рішення щодо позиціонування з застосованим зсувом повторного отримання L. Спосіб та система позиціонування згідно з винаходом забезпечують більш надійне спрямування транспортних засобів та інших подібних пристроїв, завдяки чому можуть здійснюватися дві різні методології позиціонування, таким чином, щоб забезпечувався плавний перехід між цими методологіями позиціонування без недоліку стрибкоподібної зміни позиції. 5 UA 101991 C2 Метою опису було розкриття даного винаходу без обмеження цього винаходу будь-яким варіантом втілення або конкретним набором особливостей. Спеціалісти у даній галузі зможуть реалізувати варіанти на основі конкретних прикладів втілення, які все ж охоплюються обсягом даного винаходу. 5 ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 1. Спосіб позиціонування, у якому здійснюють етапи: розраховують менш точне рішення щодо позиціонування; застосовують зсув до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування є недоступним, причому зсув являє собою різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування у момент часу, коли більш точне рішення щодо позиціонування востаннє було доступним; безперервно визначають, чи стало більш точне рішення щодо позиціонування знову доступним; розраховують більш точне рішення щодо позиціонування у разі, якщо більш точне рішення щодо позиціонування стало доступним; та застосовують зсув повторного отримання до більш точного рішення щодо позиціонування для створення нового остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування знову стало доступним. 2. Спосіб позиціонування за п. 1, у якому зсув повторного отримання являє собою різницю між остаточним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування. 3. Спосіб позиціонування за п. 1, у якому нове остаточне рішення щодо позиціонування повідомляють для контролю спрямування транспортного засобу заданим шляхом. 4. Спосіб позиціонування за п. 1, у якому остаточне рішення щодо позиціонування повідомляють для контролю спрямування транспортного засобу заданим шляхом. 5. Спосіб позиціонування за п. 1, у якому більш точне рішення щодо позиціонування являє собою рішення щодо позиціонування на основі Кінематичної зйомки в Реальному масштабі Часу (RTK). 6. Спосіб позиціонування за п. 1, у якому менш точне рішення щодо позиціонування являє собою рішення щодо позиціонування на основі Відносної Псевдодальності Різниці Фаз (RPDP). 7. Спосіб позиціонування за п. 1, у якому зсув застосовують до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування, якщо більш точне рішення щодо позиціонування є ненадійним. 8. Спосіб позиціонування, у якому здійснюють етапи: розраховують більш точне рішення щодо позиціонування; розраховують менш точне рішення щодо позиціонування; оновлюють зсув, причому зсув представляє різницю між менш точним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування; визначають, чи є більш точне рішення щодо позиціонування надійним; та повідомляють остаточне рішення щодо позиціонування у формі: застосування зсуву до менш точного рішення щодо позиціонування у разі, коли більш точне рішення щодо позиціонування є ненадійним; та застосування зсуву повторного отримання до більш точного рішення щодо позиціонування у разі, якщо більш точне рішення щодо позиціонування було визначене як ненадійне, але знову було визначене як надійне. 9. Спосіб позиціонування за п. 8, у якому зсув повторного отримання представляє різницю між остаточним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування. 10. Спосіб позиціонування за п. 8, у якому більш точне рішення щодо позиціонування являє собою RTK. 11. Спосіб позиціонування за п. 8, у якому менш точне рішення щодо позиціонування являє собою RPDP. 12. Система позиціонування для транспортного засобу, яка включає: модуль більш точного позиціонування, сконфігурований для розрахунку більш точного рішення щодо позиціонування для транспортного засобу; модуль менш точного позиціонування, сконфігурований для розрахунку менш точного рішення щодо позиціонування для транспортного засобу; та модуль корекції, який сполучений модулем більш точного позиціонування та модулем менш точного позиціонування, причому модуль корекції сконфігурований для забезпечення 6 UA 101991 C2 5 10 15 остаточного рішення щодо позиціонування для спрямування транспортного засобу заданим шляхом; причому модуль корекції також сконфігурований для: підтримання зсуву, який представляє різницю між більш точним рішенням щодо позиціонування та менш точним рішенням щодо позиціонування, доки більш точне рішення щодо позиціонування є надійним; застосування зсуву до менш точного рішення щодо позиціонування для створення остаточного рішення щодо позиціонування у разі, коли більш точне рішення щодо позиціонування стає ненадійним; та застосування зсуву повторного отримання до більш точного рішення щодо позиціонування у разі, якщо більш точне рішення щодо позиціонування було визначене як ненадійне, але знову було визначене як надійне. 13. Система позиціонування за п. 12, у якій зсув повторного отримання представляє різницю між остаточним рішенням щодо позиціонування та більш точним рішенням щодо позиціонування. 14. Система позиціонування за п. 12, у якій більш точне рішення щодо позиціонування являє собою RTK. 15. Система позиціонування за п. 12, у якій менш точне рішення щодо позиціонування являє собою RPDP. 7 UA 101991 C2 8 UA 101991 C2 9 UA 101991 C2 Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюPositioning system and method
Автори англійськоюKellar, William James, Dusha, Damien, Gray, Stuart, Roberts, Peter James
Назва патенту російськоюСистема и способ позиционирования
Автори російськоюКеллар Уильям Джеймс, Даше Демиен, Грей Стюарт, Робертс Питер Джеймс
МПК / Мітки
Мітки: спосіб, система, позиціонування
Код посилання
<a href="https://ua.patents.su/12-101991-sistema-ta-sposib-pozicionuvannya.html" target="_blank" rel="follow" title="База патентів України">Система та спосіб позиціонування</a>
Система позиціонування головок жорстких дисків
Номер патенту: 4812
Опубліковано: 15.02.2005
Автор: Гур'янов Андрій Петрович
МПК: G11B 5/012
Мітки: головок, жорстких, система, позиціонування, дисків
Формула / Реферат:
1. Система позиціонування головок жорстких дисків, що включає пристрій позиціонування, який містить головки читання/запису, та принаймні один магнітний диск з нанесеними доріжками і сервосистемою, що закріплений на шпинделі, яка відрізняється тим, що пристрій позиціонування виконаний у вигляді принаймні одної мікросхеми, до якої інтегровані головки читання/запису і контролер, головки читання/запису розміщені рядами, так що кількість головок...
Спосіб точного позиціонування і моніторингу мобільних об`єктів
Номер патенту: 76506
Опубліковано: 10.01.2013
Автори: Рязанцев Олег Вадимович, Пабат Анатолій Іванович, Шашков Андрій Вадимович
МПК: G01S 5/00, G08G 1/16, G01S 17/93
Мітки: спосіб, мобільних, позиціонування, моніторингу, точного, об'єктів
Формула / Реферат:
Спосіб точного позиціонування і моніторингу мобільних об'єктів, який полягає в тому, що навколо кожного мобільного об'єкту утворюють зони із контрольно-коректуючих станцій, формують за сигналами навігаційних космічних апаратів локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування, які передають по радіоканалу, який відрізняється тим, що локальні диференціальні поправки або GPS/ГЛОНАСС-координати позиціонування передають...
Система для моніторингу групування супутників системи позиціонування
Номер патенту: 100927
Опубліковано: 11.02.2013
Автор: Лене Робер
МПК: G01S 1/00, G01S 19/00
Мітки: моніторингу, групування, супутників, системі, система, позиціонування
Формула / Реферат:
1. Система моніторингу для моніторингу сигналів позиціонування, що випромінюються угрупуванням (2) супутників, що належать системі позиціонування, причому згадана система (1) моніторингу містить:щонайменше один супутник (S2) моніторингу, що містить щонайменше наступні бортові засоби:щонайменше один приймач (9), здатний напряму приймати сигнали позиціонування, що випромінюються супутниками (S1) згаданого групування (2)...
Спосіб позиціонування вузлів у бездротових сенсорних мережах
Номер патенту: 65765
Опубліковано: 12.12.2011
Автори: Іваненко Вікторія Олександрівна, Зеленін Анатолій Миколайович
МПК: H04W 64/00
Мітки: спосіб, мережах, бездротових, вузлів, позиціонування, сенсорних
Формула / Реферат:
Спосіб позиціонування вузлів у бездротових сенсорних мережах, заснований на визначенні дальності між вузлами і базовими станціями, точні глобальні координати яких відомі, шляхом визначення величини загасання прийнятого пілот-сигналу, при відомому рівні переданого, який відрізняється тим, що при (n+1) базових станцій, де n - мінімально необхідна для позиціонування кількість базових станцій, кожна базова станція оснащена мотом - вузлом...
Спосіб позиціонування голови глядача при використанні нашоломного дисплея
Номер патенту: 81939
Опубліковано: 25.02.2008
Автори: Ощепков Антон Анатольович, Ощепков Анатолій Миколайович
МПК: G01B 7/00, G02B 27/22, H04N 3/00
Мітки: дисплея, глядача, нашоломного, використанні, позиціонування, голови, спосіб
Формула / Реферат:
1. Спосіб позиціонування голови глядача при використанні нашоломного дисплея, при якому визначають кутове положення голови глядача відносно першої системи координат, у якій формують зображення на дисплей, і цю інформацію передають у систему візуалізації нашоломного дисплея, який відрізняється тим, що попередньо визначають вектор кутової швидкості другої, зв'язаної з головою глядача, системи координат за допомогою закріплених на його голові...
Попередній патент: Пристрій для абразивної обробки
Наступний патент: Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією
Випадковий патент: Стіна