Спосіб самоналагодження коефіцієнта передачі регулятора
Номер патенту: 113967
Опубліковано: 27.02.2017
Автори: Левінський Максим Валерійович, Хобін Віктор Андрійович
Формула / Реферат
Спосіб самоналагодження коефіцієнта передачі регулятора, що включає стабілізацію на заданому значенні регульованої змінної об'єкта керування, коефіцієнт передачі якого змінюється у часі, за рахунок зміни керуючої дії регулятора, фільтрацію регульованих змінних об'єкта керування і його моделі від низькочастотних складових, викликаних змінами збурюючих впливів на об'єкт керування, обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних об'єкта керування і його моделі, обчислення поточного значення різниці оцінок імовірнісних характеристик, зміну коефіцієнта передачі моделі об'єкта в напрямку зменшення значення різниці оцінок аж до нуля, обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, який відрізняється тим, що додатково визначають знаки фільтрованих регульованих змінних і, у випадку збігу цих знаків, продовжують обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних, обчислення поточного значення різниці оцінок імовірнісних характеристик і обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, а у випадку розбіжності знаків фільтрованих регульованих змінних оцінки імовірнісних характеристик та коефіцієнти передачі зберігають на попередньому рівні, при цьому оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування стабілізують на фіксованому значенні, для чого обчислюють поточне значення різниці між цією оцінкою й фіксованим значенням, перетворюють поточне значення різниці, наприклад інтегрують, і множать на перетворену величину оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування, зменшуючи за рахунок цього значення різниці аж до нуля, одночасно на цю перетворену величину множать і оцінку імовірнісної характеристики фільтрованої регульованої змінної моделі об'єкта керування.
Текст
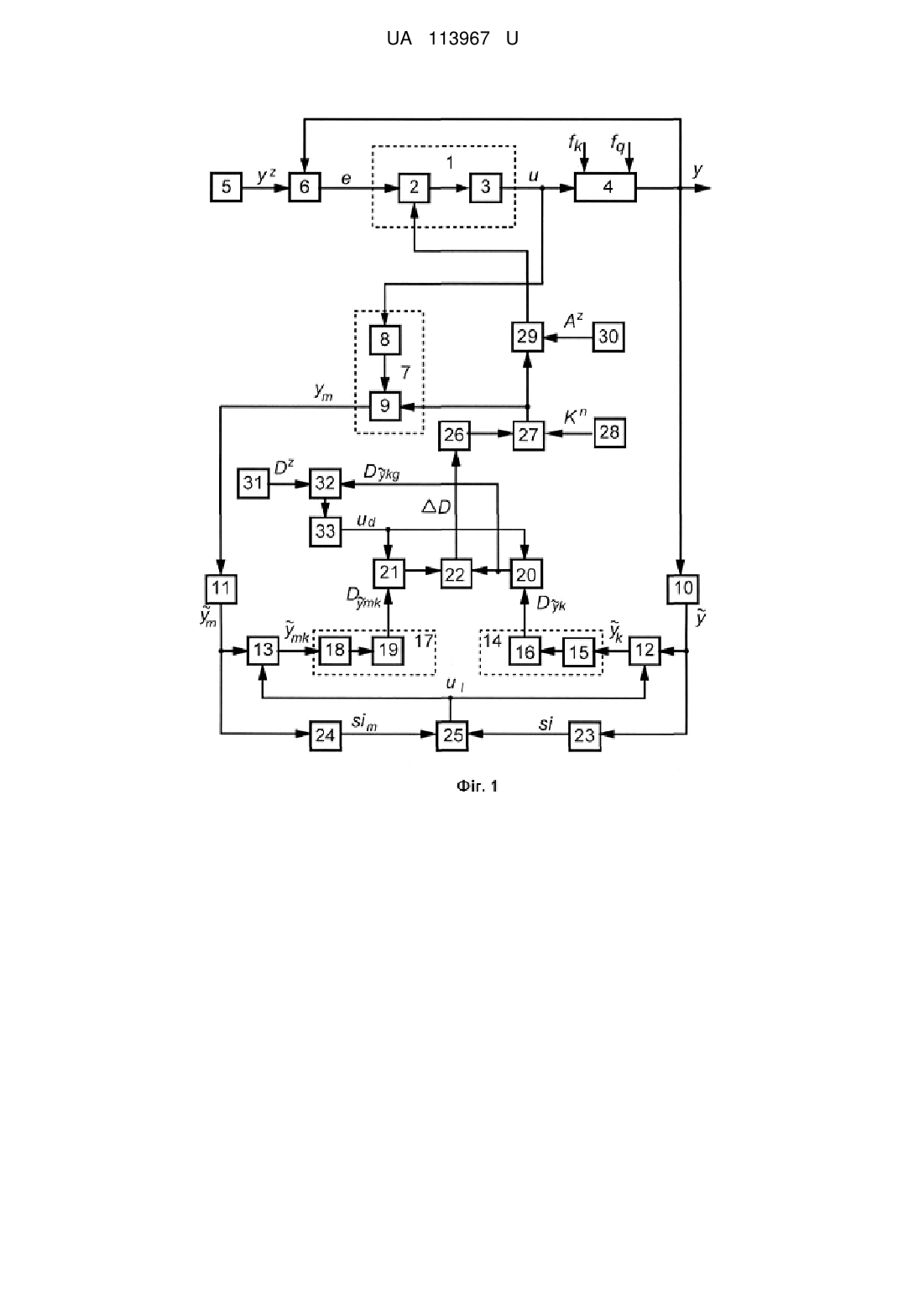
Реферат: UA 113967 U UA 113967 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до енергетичної, хімічної і харчової промисловості й може бути використана для керування об'єктами, коефіцієнт передачі яких змінюється в широкому діапазоні. Відомий спосіб оптимального автоматичного налаштування системи керування [Патент Російської Федерації №2243584 МПК G05B 13/00 (2000.01), опубліковано 27.12.2004 р., бюл. №36], вибраний як аналог, що включає перевід замкнутої системи керування в розімкнутий режим, подачу пробного східчастого сигналу з амплітудою і полярністю, які настроюються, на вхід об'єкта, вимір похідної виходу об'єкта й визначення характерних точок похідної, обчислення по них параметрів прийнятої моделі об'єкта керування (у тому числі - поточного значення коефіцієнта передачі моделі об'єкта), обчислення по параметрах моделі оптимальних параметрів настроювання регулятора (у тому числі - коефіцієнта передачі регулятора) і переводі системи з оптимальними параметрами настроювання в робочий режим. Аналог та спосіб, що заявляється, мають наступну загальну ознаку (дію) - обчислення нового значення коефіцієнта передачі регулятора при зміні коефіцієнта передачі моделі об'єкта. Аналог має наступні недоліки: а) низька точність стабілізації регульованої змінної на заданому значенні. Причини низької точності: - при переводі замкнутої системи в розімкнутий режим відхилення регульованої змінної від заданого значення, викликані впливом зовнішніх збурень, компенсуватися за рахунок змін керуючого впливу регулятора не будуть; - при подачі пробного сигналу на вхід об'єкта керування виникають додаткові відхилення регульованої змінної від заданого значення; б) низька точність обчислень коефіцієнта передачі моделі об'єкта. Причина низької точності - після розмикання системи на об'єкт керування продовжують діяти зовнішні збурення, які спотворюють значення регульованої змінної (виходу об'єкта). При вимірі похідної виходу об'єкта, що вимагає диференціювання регульованої змінної, ці спотворення будуть підсилюватися. Відповідно, спотворюються результати визначення характерних точок і результати обчислень параметрів моделі об'єкта керування, які по цих точках визначаються. Найбільш близьким до запропонованого є спосіб самоналагодження системи автоматичного керування з математичною моделлю об'єкта по каналу керування, коефіцієнт передачі якого змінюється в часі, реалізований у самоналагоджувальній системі [Патент на корисну модель UA 36671 МПК (2006) G05B 13/02, опубліковано 10.11.2008, бюл. 21]. Спосіб передбачає стабілізацію на заданому значенні регульованої змінної об'єкта керування з коефіцієнтом передачі, який змінюється у часі, за рахунок зміни керуючої дії; фільтрацію регульованих змінних об'єкта керування і його моделі від низькочастотних складових, викликаних змінами збурюючих впливів на об'єкт керування; обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних (зокрема, дисперсій); обчислення поточного значення різниці оцінок імовірнісних характеристик; зміну коефіцієнта передачі моделі об'єкта в напрямку зменшення різниці оцінок імовірнісних характеристик аж до нуля. Даний спосіб вибраний прототипом. Прототип та спосіб, який заявляється, мають наступні спільні ознаки (дії): - стабілізація на заданому значенні регульованої змінної об'єкта керування з коефіцієнтом передачі, який змінюється у часі, за рахунок зміни керуючої дії; - фільтрація регульованих змінних об'єкта керування і його моделі від низькочастотних складових, викликаних змінами збурюючих впливів на об'єкт керування; - обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних (зокрема, дисперсій); - обчислення поточного значення різниці оцінок імовірнісних характеристик; - зміна коефіцієнта передачі моделі об'єкта в напрямку зменшення різниці оцінок імовірнісних характеристик аж до нуля. Сукупність перерахованих вище дій, крім першої, становить суть функціонування контуру самоналагодження коефіцієнта передачі моделі об'єкта. Прототип має наступний недолік - низька точність визначення поточного значення коефіцієнта передачі моделі об'єкта при змінах коефіцієнта передачі об'єкта керування. Причини низької точності: - виникнення фазового зсуву між фільтрованими регульованими змінними об'єкта керування і його моделі, який спотворює поточне значення різниці оцінок імовірнісних характеристик; - зміна коефіцієнта передачі контуру самоналагодження коефіцієнта передачі моделі об'єкта при змінах коефіцієнта передачі об'єкта керування. 1 UA 113967 U 5 10 15 20 25 30 35 40 45 50 55 60 Суть причин низької точності прототипу у визначенні поточного значення коефіцієнта передачі моделі об'єкта при змінах коефіцієнта передачі об'єкта керування полягає в наступному. Перша причина. В ідеальних умовах, тобто при ідентичності динамічних властивостей об'єкта керування і його моделі й при відсутності в складі збурень високочастотних складових, регульовані змінні об'єкта керування і його моделі після їхньої фільтрації будуть синфазні (будуть мати однакову фазу й, зокрема, знаки). Слід зазначити, що зміна коефіцієнта передачі об'єкта не викликає фазового зсуву фільтрованих регульованих змінних об'єкта керування і його моделі, тому що при цьому буде змінюватися амплітуда регульованих змінних, але фази (знаки) змінних залишаються однаковими. У реальних умовах динамічні властивості об'єкта відтворюються в його моделі завжди приблизно. При цьому неоднакові запізнення й інерційності об'єкта й моделі викличуть фазовий зсув їх фільтрованих регульованих змінних. Крім того, фільтрація регульованих змінних об'єкта керування і його моделі здійснюється тільки від низькочастотних складових, які викликаються зовнішніми збуреннями. Але в реальних умовах у складі збурень можуть з'являтися складові, які мають, наприклад, східчастий характер. Вони призводять до появи в складі регульованої змінної високочастотних складових, які не фільтруються фільтрами високої частоти. Це також викличе фазовий зсув між регульованими змінними об'єкта керування і його моделі. Важливо, що всі розглянуті фазові зсуви фільтрованих регульованих змінних змінюють поточну різницю оцінок імовірнісних характеристик цих змінних без змін при цьому коефіцієнта передачі об'єкта керування. Спосіб, описаний у прототипі, не враховує природу появи поточної різниці оцінок імовірнісних характеристик, а саме виникла вона в результаті зміни коефіцієнта передачі об'єкта або в результаті фазових зсувів фільтрованих регульованих змінних. Це й зменшує точність визначення коефіцієнта передачі моделі об'єкта керування. Друга причина. При зменшенні коефіцієнта передачі об'єкта керування приріст регульованих змінних, викликаних змінами як збурень так і керуючих впливів, зменшуються. А це призводить до зменшення абсолютних значень поточної різниці оцінок імовірнісних характеристик фільтрованих змінних об'єкта і його моделі. У випадку збільшення коефіцієнта передачі об'єкта поточна різниця навпаки - збільшується. Таким чином, у прототипі при змінах коефіцієнта передачі об'єкта змінюється коефіцієнт передачі контуру самоналагодження. При високих коефіцієнтах передачі контуру самоналагодження перехідні процеси в ньому будуть мати високу коливальність, а при низьких - будуть повільними. Це, в обох випадках, знижує точність визначення коефіцієнта передачі моделі об'єкта керування. В основу корисної моделі, що заявляється, поставлена задача розробити удосконалений спосіб самоналагодження коефіцієнта передачі регулятора, в якому, шляхом виконання нових операцій і зміни порядку виконання відомих операцій, забезпечити підвищення точності визначення коефіцієнта передачі моделі об'єкта керування при змінах коефіцієнта передачі об'єкта керування й, як наслідок, підвищення точності підтримки регульованої змінної об'єкта керування на заданому значенні. Поставлена задача вирішується в способі самоналагодження коефіцієнта передачі регулятора, що включає стабілізацію на заданому значенні регульованої змінної об'єкта керування, коефіцієнт передачі якого змінюється у часі, за рахунок зміни керуючої дії регулятора, фільтрацію регульованих змінних об'єкта керування і його моделі від низькочастотних складових, викликаних змінами збурюючих впливів на об'єкт керування, обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних об'єкта керування і його моделі, обчислення поточного значення різниці оцінок імовірнісних характеристик, зміну коефіцієнта передачі моделі об'єкта в напрямку зменшення значення різниці оцінок аж до нуля, обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, згідно з корисною моделлю, додатково визначають знаки фільтрованих регульованих змінних і, у випадку збігу цих знаків, продовжують обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних, обчислення поточного значення різниці оцінок імовірнісних характеристик і обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, а у випадку розбіжності знаків фільтрованих регульованих змінних оцінки імовірнісних характеристик та коефіцієнти передачі зберігають на попередньому рівні, при цьому оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування стабілізують на фіксованому значенні, для чого обчислюють поточне значення різниці між цією оцінкою й фіксованим значенням, перетворюють поточне значення різниці, наприклад, інтегрують, і множать на перетворену величину оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування, зменшуючи за рахунок цього значення 2 UA 113967 U 5 10 15 20 25 30 35 40 45 50 55 різниці аж до нуля, одночасно на цю перетворену величину множать і оцінку імовірнісної характеристики фільтрованої регульованої змінної моделі об'єкта керування. Корисна модель пояснюється за допомогою рисунків, де на фіг. 1 показана структурна схема системи, яка реалізує запропонований спосіб самоналагодження; на фіг. 2: графік зміни коефіцієнта передачі ko(t) об'єкта керування, графік зміни часу запізнення τo(t) об'єкта керування, графіки змін коефіцієнта передачі km(t) моделі об'єкта керування, графіки змін регульованої змінної y(t) об'єкта керування, значення середньо-квадратичного відхилення помилки регулювання основного контуру σe. Система, яка реалізує запропонований спосіб самоналагодження, включає до свого складу: регулятор основного контуру регулювання 1, який складається з першого блока множення 2 (перша частина регулятора, яка реалізує пропорційну частину алгоритму керування й визначає змінний коефіцієнт передачі kr), та другої частини регулятора 3, яка реалізує інерційну частину алгоритму, наприклад, інтегральну й диференціальну складові в ПІД-алгоритмі; об'єкт керування 4; перший, другий, третій і четвертий задатчики 5, 28, 30, 31; перший, другий, третій і четвертий алгебраїчні суматори 6, 22, 27, 32; модель об'єкта керування 7, яка складається з інерційної частини моделі об'єкта керування 8 та другого блока множення 9, який реалізує пропорційну частину моделі об'єкта керування й визначає змінний коефіцієнт передачі km моделі; ідентичні перший і другий фільтри високої частоти 10, 11; перший і другий керовані ключі з пам'яттю 12, 13; ідентичні перший і другий обчислювачі імовірнісних характеристик 14, 17, які складаються з першого і другого квадратора 15, 18, а також з першого і другого фільтрів низької частоти 16, 19; третій і четвертий блок множення 20, 21; перший і другий граничний детектор 23, 24; блок логіки 25; регулятор 26 контуру самоналагодження коефіцієнта передачі моделі об'єкта; блок ділення 29; регулятор 33 контуру масштабування оцінок імовірнісних характеристик. На фіг. 1 наведені наступні позначення: у - сигнал регульованої змінної з виходу об'єкта керування 4; z у - сигнал з виходу задатчика 5; z e - сигнал похибки у - у; u - керуючий вплив регулятора 1 основного контуру регулювання; fk, fq - зовнішні координатні й параметричні збурення, які діють на об'єкт керування; уm - сигнал з виходу моделі об'єкта керування 7; ~ y - центрований сигнал регульованої змінної об'єкта керування у з виходу фільтра 10; ~ y - центрований сигнал регульованої змінної моделі об'єкта керування y з виходу фільтра m m 11; ~ y - центрований сигнал з виходу ключа 12; k ~ y - центрований сигнал з виходу ключа 13; mk D~k y - сигнал оцінки дисперсії регульованої змінної об'єкта керування на виході обчислювача імовірнісних характеристик 14; D~mk y - сигнал оцінки дисперсії регульованої змінної моделі об'єкта керування на виході обчислювача імовірнісних характеристик 17; n К - сигнал з виходу задатчика 28 - константа, яка визначає початкове значення коефіцієнта передачі моделі об'єкта; z А - сигнал з виходу задатчика 30 - константа, яка визначає бажаний вид перехідного процесу в основному контурі регулювання; z D - сигнал з виходу задатчика 31 - константа, яка визначає задане значення оцінки імовірнісної характеристики; ud - керуючий вплив регулятора 33 контуру масштабування оцінок імовірнісних характеристик; uℓ - керуючий вплив з виходу блока логіки 25; ΔD- сигнал різниці оцінок дисперсій на виході алгебраїчного суматора 22; D~kg y - скоригований сигнал оцінки дисперсії регульованої змінної об'єкта керування на виході третього блоку множення 20. Елементи, перераховані на схемі системи, яка реалізує запропонований спосіб самоналагодження, сполучені між собою наступним чином. Вихід першого задатчика 5 з'єднаний з першим входом першого алгебраїчного суматора 6, вихід якого з'єднаний з першим входом регулятора 1, а саме з першим входом першого блока множення 2. Вихід першого блока 3 UA 113967 U 5 10 15 20 25 30 35 40 45 50 55 множення 2 з'єднаний з входом другої частини регулятора 3, вихід якого з'єднаний з входом об'єкта керування 4 та першим входом моделі об'єкта керування 7, а саме з входом інерційної частини моделі об'єкта керування 8. Вихід інерційної частини моделі об'єкта керування 8 з'єднаний з першим входом другого блока множення 9. Вихід об'єкта керування 4 з'єднаний з другим входом першого алгебраїчного суматора 6 та входом першого фільтра високої частоти 10. Вихід другого блока множення 9 з'єднаний з входом другого фільтра високої частоти 11. Вихід першого фільтра високої частоти 10 з'єднаний з першим входом першого керованого ключа з пам'яттю 12 та з входом першого граничного детектора 23. Вихід другого фільтра високої частоти 11 з'єднаний з першим входом другого керованого ключа з пам'яттю 13 та з входом другого граничного детектора 24. Вихід першого граничного детектора 23 з'єднаний з першим входом блока логіки 25, а вихід другого граничного детектора 24 з'єднаний з другим входом блока логіки 25. Вихід блока логіки 25 з'єднаний з другим входом першого керованого ключа з пам'яттю 12 та з другим входом другого керованого ключа з пам'яттю 13. Вихід першого керованого ключа з пам'яттю 12 з'єднаний входом першого обчислювача імовірнісних характеристик 14, а саме з входом першого квадратора 15, вихід якого з'єднаний з входом першого фільтра низької частоти 16. Вихід другого керованого ключа з пам'яттю 13 з'єднаний входом другого обчислювача імовірнісних характеристик 17, а саме з входом другого квадратора 18, вихід якого з'єднаний з входом другого фільтра низької частоти 19. Вихід першого фільтра низької частоти 16 з'єднаний з першим входом третього блока множення 20, а вихід другого фільтра низької частоти 19 з'єднаний з першим входом четвертого блока множення 21. Вихід третього блока множення 20 з'єднаний з першим входом другого алгебраїчного суматора 22 та з першим входом четвертого алгебраїчного суматора 32. Вихід четвертого блока множення 21 з'єднаний з другим входом другого алгебраїчного суматора 22, вихід якого з'єднаний з входом регулятора 26 контуру самоналагодження коефіцієнта передачі моделі об'єкта. Вихід регулятора 26 з'єднаний з першим входом третього алгебраїчного суматора 27, другий вхід якого з'єднаний з виходом другого задатчика 28. Вихід третього алгебраїчного суматора 27 з'єднаний з другим входом блока ділення 29 та з другим входом другого блока множення 9. Перший вхід блока ділення 29 з'єднаний з виходом третього задатчика 30, а вихід блока ділення 29 з'єднаний з другим входом першого блока множення 2. Вихід четвертого задатчика 31 з'єднаний з другим входом четвертого алгебраїчного суматора 32, вихід якого з'єднаний з входом регулятора 33 контуру масштабування оцінок імовірнісних характеристик. Вихід регулятора 33 з'єднаний з другим входом третього блока множення 20 та другим входом четвертого блока множення 21. Пропонований спосіб здійснюється системою керування, структурна схема якої представлена на фіг. 1, у наступному порядку. Керуючий вплив u регулятора стабілізує на z заданому значенні у регульовану змінну у об'єкта керування, компенсуючи вплив зовнішніх координатних збурень fk. У структурній схемі системи функцію стабілізації виконують регулятор 1, об'єкт керування 4, задатчик 5 і алгебраїчний суматор 6, зі своїми зв'язками, що утворюють основний контур регулювання. Для рішення багатьох практичних завдань об'єкт керування 4 можна описати передатною функцією: ko W o s exp o s k o W oi s o s 1 , (1) де k0 - коефіцієнт передачі об'єкта керування, То - постійна часу об'єкта керування при його oi апроксимації інерційною ланкою першого порядку, τо - час запізнення в об'єкті керування, W (s) - інерційна частина передатної функції, a s - оператор Лапласа. Параметри регулятора 1 можуть бути розраховані по різних інженерних методиках. Наприклад, згідно з [Копелович А.П. Инженерные методы рассчёта при выборе автоматических регуляторов [Текст]/М.:Гос.научно-техническое издательство литературы по черной и цветной металлургии, 1960-190 с., - С. 111], параметри ПІД-регулятора визначаються за відомими параметрами об'єкта керування (1): коефіцієнт передачі регулятора kr розраховується з виразу a z k o k r o , o час ізодрому - iz b o ; c o ; час упередження - pr z де A , а, b, с - константи, які визначають бажанийвид перехідного процесу. 4 UA 113967 U z Якщо задатися значенням А , то коефіцієнт передачі регулятора 1 можна розрахувати з виразу 5 10 15 20 25 30 35 40 45 50 kr z / k o . (2) За аналогією з (1) передатна функція моделі об'єкта керування представляється у вигляді km W m s exp ms km W mi s ms 1 , (3) де km - коефіцієнт передачі моделі об'єкта керування, Тm - постійна часу моделі об'єкта керування при його апроксимації інерційною ланкою першого порядку, τm - час запізнення в mi моделі об'єкта керування, а W (s) - інерційна частина передатної функції. Змінний коефіцієнт передачі регулятора 1 реалізує перший блок множення 2, який множить z сигнал похибки е= у -у на обчислений по залежності (2) поточний коефіцієнт передачі регулятора kr. Частина 3 регулятора реалізує інерційні складові алгоритму регулювання, наприклад, І - та Д - складові. Спосіб, який заявляється, спрямований на самоналагодження коефіцієнта передачі регулятора kr при змінах коефіцієнта передачі об'єкта ko за рахунок підстроювання (наближення) до нього поточних значень коефіцієнта передачі k m моделі об'єкта. При цьому передбачається, що: - зміни коефіцієнта передачі об'єкта k0, що є по своїй суті параметричними збуреннями fq для системи регулювання, можуть суттєво змінюватися (в 2-5 раз у порівнянні з номінальним значенням), однак ці зміни носять низькочастотний характер і на інтервалі часу T=(5-10)/fc, де fc - частота зрізу системи, коефіцієнт передачі об'єкта ko можна вважати квазістаціонарним; - параметри Тo й τо об'єкта квазістаціонарні й міняються несуттєво; - зовнішні координатні збурення fk(t), які впливають на об'єкт, носять випадковий характер, причому їх спектральний склад більш низькочастотний, ніж спектр коливань регульованої змінної y(t). Крім перерахованих раніше, інші блоки, представлені в структурній схемі системи, яка реалізує запропонований спосіб, призначені для визначення змінних значень коефіцієнта передачі kо об'єкта керування й підстроювання (наближення до нього) значень коефіцієнта передачі km моделі. Модель об'єкта керування 7 по залежності (3) у структурній схемі системи, яка реалізує mi пропонований спосіб, складається з блоку 8 інерційної частини моделі об'єкта керування W (s), що включає й ланку запізнення, і другого блока множення 9, який формує змінний коефіцієнт передачі km. У відповідності із способом, що заявляється, проводиться фільтрація регульованих змінних об'єкта керування і його моделі від низькочастотних складових, викликаних змінами збурюючих впливів на об'єкт керування. У структурній схемі системи, яка реалізує запропонований спосіб самоналагодження, функцію фільтрації виконують фільтри 10, 11. У найпростішому випадку це диференціатори фільтри високої частоти, передатна функція яких s W hf s hf s 1 , (4) де Thf - постійна часу інерційної частини фільтра. Фільтри 10, 11 виключають із сигналів регульованих змінних з виходу об'єкта керування ~ ~ y t y ~ t y й з виходу його моделі ym t ym ym t m постійні складові yt , y m на їхньому ~ виході спостерігаються центровані сигнали ym t . Далі, відповідно до способу, що заявляється, визначають знаки фільтрованих регульованих ~ змінних yt , ym t і, у випадку збігу цих знаків, продовжують обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних, обчислення поточного значення різниці оцінок імовірнісних характеристик і обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, а у випадку розбіжності знаків фільтрованих регульованих змінних оцінки імовірнісних характеристик та коефіцієнти передачі зберігають на попередньому рівні. У структурній схемі системи, яка реалізує запропонований спосіб самоналагодження, цю функцію виконують перший 12 і другий 13 ключі з пам'яттю, перший 23 і другий 24 граничний детектор, а також блок логіки 25. 5 UA 113967 U ~ ~ Знаки фільтрованих регульованих змінних об'єкта керування yt і його моделі ym t визначають перший 23 і другий 24 граничний детектор по залежностях: 1 ~m t 0 1, ~ t 0 ,y y si ~ i si ~ , , 1 y t 0 1 y m t 0 . (5) Блок логіки 25 формує керуючий вплив по залежності: 5 1, si sim 1 u1 0, si sim 1 . (6) Перший 12 і другий 13 ключі з пам'яттю реалізують наступні залежності: ~ ~ ,u 1 y ~ y , u1 1 i ~ y k ~ n1 y mk ~ m1 1 n y , u1 0 y m , u1 0 , (7) ~ n 1 ~ n1 y де y , m попередні значення центрованих складових регульованих змінних об'єкта ~ 10 15 20 25 30 ~ керування y і його моделі y m до моменту переходу керуючого сигналу u1 блоку логіки 25 зі значення одиниці в нуль. У ті моменти часу, коли фільтровані регульовані змінні об'єкта керування і його моделі змінюються синфазно й знаки їх однакові, необхідно обчислювати значення оцінок їх D ~k D~mk y , y імовірнісних характеристик (тобто оцінки дисперсій ), тому що вони містять інформацію про поточні значення коефіцієнтів передачі об'єкта керування і його моделі. У такі моменти часу блок логіки 25 включає ключі 12, 13 сигналом керування u1=1 і обчислювачі 14, 17 D ~ D~ обчислюють поточні значення оцінок імовірнісних характеристик-дисперсій yk , ymk . В інші моменти часу, коли фільтровані регульовані змінні об'єкта керування і його моделі змінюються несинфазно й знаки їх неоднакові, інформація про поточні значення коефіцієнтів передачі об'єкта керування і його моделі спотворюється під впливом розбіжності параметрів об'єкта керування і його моделі, а також під впливом зовнішніх координатних збурень східчастого характеру. У такі моменти часу блок логіки 25 відключає ключі 12, 13 сигналом керування u1=0 і оцінки імовірнісних характеристик фільтрованих регульованих змінних об'єкта керування і його D ~k D~ y ymk ) запам'ятовуються на попередньому рівні фільтрами моделі (оцінки дисперсій , низької частоти 16 і 19. Це підвищує точність подальшого визначення коефіцієнта передачі моделі об'єкта керування km при змінах коефіцієнта передачі k0 об'єкта керування. Далі, згідно із способом, що заявляється, на ковзному інтервалі часу проводиться обчислення поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних, зокрема, оцінок дисперсії. У структурній схемі системи, яка реалізує запропонований спосіб самоналагодження, цю функцію виконують перший 12 і другий 13 обчислювачі оцінок ~ імовірнісних характеристик. Центровані сигнали yt , ym t регульованої змінної об'єкта керування і його моделі з виходів фільтрів 10 і 11, проходять через перший 12 і другий 13 ~ t y ~ y t керовані ключі з пам'яттю, на виході яких формуються сигнали k й mk . Ці сигнали подаються на перший 12 і другий 13 обчислювачі імовірнісних характеристик, до складу яких входять перший 15 і другий 18 квадратори, перший 16 і другий 19 фільтри низької частоти з 35 D~ 40 45 передатною функцією Wf s 1/ f s 1 . Відомо (див. [Куликов Е.И. Методы измерения случайных процессов [Текст]/М.:Радио и связь, 1986.-282 с, стр. 106], що на виході фільтрів ~ D~ ~ формуються оцінки дисперсій yk , ymk сигналів y k t і y mk t на ковзному інтервалі часу Tос.=Tfl/2. Значення інтервалу оцінювання Tос вибирається з діапазону T oc = (5-10)/fc, де fс частота зрізу системи регулювання. Обчислення поточного значення різниці оцінок імовірнісних характеристик, як передбачає спосіб, який заявляється, у структурній схемі системи виконує алгебраїчний суматор 22, на входи якого подаються сигнали оцінок дисперсій, які масштабуються третім 20 і четвертим 21 блоками множення. На виході суматора 22 формується сигнал ΔD різниці оцінок дисперсій ~ t ~ y сигналів k і ymk t відповідно до виразу D D~k ud D~mk ud , y y (8) 6 UA 113967 U 5 де u d - масштабуючий коефіцієнт - керуючий вплив регулятора 33 контуру масштабування оцінок імовірнісних характеристик. В прототипі, базуючись на відомих залежностях (див. [Пугачёв B.C. и др. Основы автоматического управления/Под ред. B.C. Пугачёва[Текст]/М.: Гос. издательство физикоD~ y математической литературы, 1963. - 646 с., стр. 264], показано, що оцінки дисперсії D ~m y регульованої змінної y(t) та дисперсії сигналу ym(t) її моделі пропорційні відповідно 2 квадрату коефіцієнта передачі об'єкта керування k o та квадрату коефіцієнта передачі моделі 2 об'єкта керування k m . На основі залежностей 10 (7) в системі, яка реалізує запропонований спосіб ~ самоналагодження, центрований сигнал y k з виходу першого керованого ключа з пам'яттю 12 ~ пропорційний центрованому сигналу y регульованої змінної об'єкта керування у з виходу ~ фільтра 10, а центрований сигнал y mk з виходу ключа 13 пропорційний центрованому сигналу регульованої змінної моделі об'єкта керування уm з виходу фільтра 11. Отже, різниця ΔD (8) k2 15 20 25 30 35 40 k2 пропорційна o - m і тому, якщо спрямувати ΔD до нуля, то при цьому ko km. Згідно із способом, який заявляється, проводиться зміна коефіцієнта передачі моделі об'єкта km в напрямку зменшення значення різниці оцінок ΔD аж до нуля. У структурній схемі системи, яка реалізує запропонований спосіб самоналагодження, цю функцію виконують регулятор 26 контуру самоналагодження коефіцієнта передачі km моделі об'єкта, наприклад з ПІ-або ПІД-алгоритмом, суматор 27 і задатчик 28, який визначає початковий коефіцієнт передачі n моделі об'єкта К . Параметри регулятора 26 розраховуються за рекомендаціями, як і для регулятора 1. Якщо на вхід регулятора 26 надходить не нульовий сигнал ΔD, то він змінює свій керуючий вплив і через суматор 27, другий блок множення 9 змінює також і коефіцієнт передачі km моделі об'єкта доти, поки різниця ΔD (8) на виході другого алгебраїчного суматора 22 не стане рівною нулю. При цьому фактично km ko. У структурній схемі системи, яка реалізує запропонований спосіб самоналагодження, обчислення коефіцієнта передачі регулятора 1 основного контуру по змінному коефіцієнту передачі моделі об'єкта виконує блок ділення 29 згідно з залежністю (2), на перший вхід якого z надходить константа А з виходу задатчика 30, а на другий вхід - поточне значення коефіцієнта передачі km моделі об'єкта керування з виходу суматора 27. У відповідності із способом, що заявляється, оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування стабілізують на фіксованому значенні, для чого обчислюють поточне значення різниці між цією оцінкою й фіксованим значенням, перетворюють поточне значення різниці, наприклад, інтегрують, і множать на перетворену величину оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування, зменшуючи за рахунок цього значення різниці аж до нуля. У структурній схемі системи, що реалізує запропонований спосіб самоналагодження, ці функції виконують третій задатчик 31, четвертий алгебраїчний суматор 32, регулятор 33 масштабування оцінки імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування, наприклад, з І-алгоритмом, і третій блок множення 20. Спільно ці блоки становлять контур стабілізації оцінки D~ імовірнісної характеристики (оцінки дисперсії ykg ) фільтрованої регульованої змінної об'єкта z керування з виходу третього блоку множення 20 на фіксованому значенні D , яке задається на виході четвертого задатчика 31. Поточне значення оцінки D ~kg y подається на вхід четвертого D k D z D ~kg y 45 суматора 32, на виході якого формується різниця між цими сигналами. Регулятор 33 перетворює (наприклад, інтегрує) поточне значення різниці, формуючи керуючий вплив ud: 1 ud i t D dt k , (9) де Тi - параметр налаштування регулятора 33, який розраховується за рекомендаціями, як і для регулятора 1. o 7 UA 113967 U На величину ud у третьому блоці множення 20 множиться сигнал оцінки імовірнісної D~ 5 10 15 20 25 характеристики фільтрованої регульованої змінної об'єкта керування yk , що надходить із виходу першого фільтра низької частоти 16, тобто D~kg D~k ud y y . (10) Щоб забезпечити симетрію оцінок імовірнісних характеристик фільтрованої регульованої змінної об'єкта керування і його моделі й не спотворити значення різниці ΔD, відповідно до способу, який заявляється, одночасно на перетворену величину ud з виходу регулятора 33 у четвертому блоці множення 21 множать і оцінку імовірнісної характеристики фільтрованої D~ регульованої змінної ykm моделі об'єкта керування. Стабілізація значень оцінок імовірнісних характеристик регулятором 33 поліпшує роботу контуру самоналагодження коефіцієнта передачі km моделі об'єкта при змінах коефіцієнта D~ передачі k0 об'єкта керування. Зменшення коливань абсолютних значень оцінок дисперсій yk , D~mk y дозволяє регулятору 26 більш точно встановлювати коефіцієнт передачі km моделі, відслідковуючи зміни коефіцієнта передачі k0 об'єкта керування. Отже, підвищується точність визначення коефіцієнта передачі моделі об'єкта керування. Як показали результати моделювання на ЕОМ спосіб, що заявляється, вирішує поставлену задачу - дозволяє підвищити точність визначення коефіцієнта передачі моделі об'єкта керування при змінах коефіцієнта передачі об'єкта керування й, як наслідок, підвищити точність підтримки регульованої змінної об'єкта керування на заданому значенні. Як випливає з фіг. 2, при впливі на об'єкт керування зовнішніх збурень випадкового характеру і лінійних змінах коефіцієнта передачі ko(t) і часу запізнення o(t) в системі керування за прототипом точність самоналагодження коефіцієнта передачі km моделі об'єкта погіршується. Як наслідок, поступово збільшуються відхилення регульованої змінної y(t) від заданого z значення у . В системі керування за корисною моделлю усунутий вплив фазових зсувів фільтрованих регульованих змінних об'єкта керування і його моделі, які спотворюють значення оцінок імовірнісних характеристик. Стабілізація цих оцінок підвищує точність визначення поточних значень коефіцієнта передачі km моделі об'єкта. При цьому середньоквадратичне відхилення похибки регулювання основного контуру поліпшується від значення σе=48,2 до значення σе=39,4. 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 55 Спосіб самоналагодження коефіцієнта передачі регулятора, що включає стабілізацію на заданому значенні регульованої змінної об'єкта керування, коефіцієнт передачі якого змінюється у часі, за рахунок зміни керуючої дії регулятора, фільтрацію регульованих змінних об'єкта керування і його моделі від низькочастотних складових, викликаних змінами збурюючих впливів на об'єкт керування, обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних об'єкта керування і його моделі, обчислення поточного значення різниці оцінок імовірнісних характеристик, зміну коефіцієнта передачі моделі об'єкта в напрямку зменшення значення різниці оцінок аж до нуля, обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, який відрізняється тим, що додатково визначають знаки фільтрованих регульованих змінних і, у випадку збігу цих знаків, продовжують обчислення на ковзному інтервалі часу поточних оцінок імовірнісних характеристик фільтрованих регульованих змінних, обчислення поточного значення різниці оцінок імовірнісних характеристик і обчислення коефіцієнта передачі регулятора по змінному коефіцієнту передачі моделі об'єкта, а у випадку розбіжності знаків фільтрованих регульованих змінних оцінки імовірнісних характеристик та коефіцієнти передачі зберігають на попередньому рівні, при цьому оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування стабілізують на фіксованому значенні, для чого обчислюють поточне значення різниці між цією оцінкою й фіксованим значенням, перетворюють поточне значення різниці, наприклад інтегрують, і множать на перетворену величину оцінку імовірнісної характеристики фільтрованої регульованої змінної об'єкта керування, зменшуючи за рахунок цього значення різниці аж до нуля, одночасно на цю перетворену величину множать і оцінку імовірнісної характеристики фільтрованої регульованої змінної моделі об'єкта керування. 8 UA 113967 U 9 UA 113967 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 13/02
Мітки: спосіб, коефіцієнта, самоналагодження, передачі, регулятора
Код посилання
<a href="https://ua.patents.su/12-113967-sposib-samonalagodzhennya-koeficiehnta-peredachi-regulyatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб самоналагодження коефіцієнта передачі регулятора</a>
Спосіб керування трифазним фільтрокомпенсуючим перетворювачем з використанням нейронечіткого регулятора
Номер патенту: 61913
Опубліковано: 10.08.2011
Автори: Гусев Олександр Олександрович, Іванець Сергій Анатолійович
МПК: H02M 1/12
Мітки: використанням, регулятора, трифазним, нейронечіткого, спосіб, керування, перетворювачем, фільтрокомпенсуючим
Формула / Реферат:
Спосіб керування трифазним фільтрокомпенсуючим перетворювачем з використанням нейронечіткого регулятора, який відрізняється тим, що в процесі керування нейронечіткий регулятор відслідковує зміни струму в навантаженні і змінює значення напруги на конденсаторах компенсатора.
Спосіб і пристрій зв’язку для вибору числа кодових каналів і асоційованого коефіцієнта розширення для передачі cdma
Номер патенту: 92191
Опубліковано: 11.10.2010
Автори: Міхель Юрген, Рааф Бернхард
МПК: H04B 1/707
Мітки: вибору, спосіб, передачі, числа, пристрій, кодових, зв'язку, асоційованого, каналів, розширення, коефіцієнта
Формула / Реферат:
1. Спосіб зв'язку для вибору числа кодових каналів і асоційованого коефіцієнта розширення для передачі CDMA між передавальним і приймальним пристроєм, який міститьвизначення набору допустимих пар параметрів, причому параметри є числом кодових каналів і асоційованим коефіцієнтом розширення, у відповідності з щонайменше одним першим критерієм вибору,вибір пари параметрів з набору допустимих пар параметрів для передачі CDMA у...
Вимірювач комплексного коефіцієнта передачі
Номер патенту: 99074
Опубліковано: 10.07.2012
Автори: Боков Геннадій Вікторович, Афонін Пилип Ігорович, Бугайов Павло Олександрович, Лащенко Ірина Вікторівна
МПК: G01R 27/06
Мітки: передачі, вимірювач, коефіцієнта, комплексного
Формула / Реферат:
Вимірювач комплексного коефіцієнта передачі, що складається з генератора НВЧ з дискретною електронною перестройкою частоти, подільника потужності, коаксіально-хвилеводних переходів, двоканального хвилевідно-щілинного перетворювача, що має вимірювальний і опорний канали та детекторні головки, а також узгоджених навантажень, який відрізняється тим, що перетворювач має дві детекторні головки, що збуджуються як опорним, так і вимірювальним...
Спосіб керування енергією передачі у безпровідному пристрої зв’язку
Номер патенту: 72259
Опубліковано: 15.02.2005
Автори: Тідеманн Едвард Г., молодший, Саркар Сандіп, Сайфаддін Ахмед
МПК: H04B 7/00, H04J 13/00, H04L 27/00, H04L 9/00
Мітки: зв'язку, передачі, пристрої, спосіб, керування, енергією, безпровідному
Формула / Реферат:
1. У безпровідному пристрої зв'язку спосіб керування енергією передачі у віддаленій станції у відповідь на прийняті команди керування потужністю замкненого контуру, який включає операції:(а) ідентифікації тих з зазначених прийнятих команд керування потужністю замкненого контуру, які базуються на виключених з передачі частинах сигналу зворотного каналу, причому зазначена операція ідентифікації виконується залежно від зумовленого типу...
Спосіб керування вентильним двигуном у синхронному режимі з використанням нечіткого регулятора
Номер патенту: 40910
Опубліковано: 27.04.2009
Автори: Іванець Сергій Анатолійович, Гусев Олександр Олександрович
МПК: H02P 6/00
Мітки: вентильним, режимі, регулятора, спосіб, нечіткого, використанням, синхронному, двигуном, керування
Формула / Реферат:
Спосіб керування вентильним двигуном у синхронному режимі з використанням нечіткого регулятора, який відрізняється тим, що використовують єдиний нечіткий регулятор як на етапі стабілізації швидкості, так і на етапі розгону двигуна з використанням частотного пуску.
Попередній патент: Вальцівний верстат
Наступний патент: Спосіб припинення кровотечі ложа жовчного міхура після холецистектомії
Випадковий патент: Векторно-аналізаторний інтерференційний пристрій вимірювання діелектричної проникності матеріалів