Електропривід змінного струму


Формула / Реферат
Електропривід змінного струму, що складається з трифазного автономного інвертора напруги, датчиків струмів фаз та датчика частоти обертання ротора асинхронного двигуна, асинхронного двигуна з короткозамкненим ротором та системи керування, який відрізняється тим, що додатково містить тяговий генератор, некерований випрямляч, блок датчиків величини та частоти лінійної напруги тягового генератора, проміжного фільтра, гальмівного ключа, гальмівної провідності, ключа регулювання збудженням тягового генератора, а до складу системи керування входять: задатчик потужності, що з'єднаний з калькулятором потужності, вихід якого з'єднаний з позитивним входом блока суматора, а від'ємний вхід блока суматора з'єднаний з першим виходом блока розрахунку та фільтрації зворотних зв'язків, вихід блока суматора з'єднаний з регулятором потужності, вихід якого з'єднаний з входом калькулятора задання модуля вектора струму статора, вихід якого з'єднаний з входами калькуляторів повздовжньої та поперечної проекцій вектора струму статора та з другим входом калькулятора кута навантаження, а другий вихід блока розрахунку та фільтрації зворотних зв'язків з'єднаний з входом калькулятора поточного значення величини індуктивності намагнічування, вихід якого з'єднаний з входами калькулятора величини постійної часу ротора та першим входом калькулятора кута навантаження, також другий вихід блока розрахунку та фільтрації зворотних зв'язків з'єднаний з калькулятором поточного значення модуля вектора струму статора, а третій вихід блока розрахунку та фільтрації зворотних зв'язків з'єднаний з входом калькулятора модуля вектора потокозчеплення ротора, вихід якого з'єднаний з третім входом калькулятора кута навантаження, вихід якого з'єднаний з другим входом калькулятора задання повздовжньої проекції вектора струму статора, другим входом калькулятора задання поперечної проекції вектора струму статора, а також другим входом калькулятора поточного кута положення системи координат, а перший вхід калькулятора поточного кута положення системи координат з'єднаний з виходом калькулятора постійної часу ротора, а третій вхід калькулятора поточного кута положення системи координат з'єднаний з третім виходом блока розрахунку та фільтрації зворотних зв'язків, вихід калькулятора задання повздовжньої проекції вектора струму статора з'єднаний з позитивним входом блока суматора, а вихід калькулятора задання поперечної проекції вектора струму статора з'єднаний з позитивним входом іншого блока суматора, а від'ємні входи блоків суматорів з'єднані з другим входом блока розрахунку та фільтрації зворотних зв'язків, виходи блоків суматорів з'єднані з входами регуляторів повздовжньої та поперечної проекції вектора струму статора відповідно, виходи яких надходять на два входи блока компенсації та розрахунку модуля вектора напруги статора, вихід якого з'єднаний з першим входом калькулятора напруг, а другий вхід калькулятора напруг з'єднаний з третім виходом блока розрахунку та фільтрації зворотних зв'язків, перший вихід калькулятора напруг з'єднаний з входом блока формувача імпульсів керування ключами автономного інвертора напруги, а другий вхід блока формувача імпульсів керування ключами автономного інвертора напруги з'єднаний з виходом блока калькулятора поточного кута положення системи координат, також виходом блока калькулятора поточного кута положення системи координат з'єднаний з п'ятим входом блока розрахунку та фільтрації зворотних зв'язків, шість виходів блока формувача імпульсів керування ключами автономного інвертора напруги з'єднані з шістьома ключами автономного інвертора напруги, другий вихід калькулятора напруг з'єднаний з позитивним входом блока суматора, а від'ємний вхід блока суматора з'єднаний з четвертим виходом блока розрахунку та фільтрації зворотних зв'язків, а вихід блока суматора з'єднаний з входом регулятора гальмівної провідності, вихід якого з'єднаний з входом формувача імпульсів керування гальмівним ключем, а вихід блока формувача імпульсів керування гальмівним ключем з'єднаний з гальмівним ключем, третій вихід калькулятора напруг з'єднаний з першим входом блока пошуку "min", а другий вхід блока пошуку "min" з'єднаний з виходом калькулятора обмеження лінійної напруги тягового генератора, вихід блока пошуку "min" з'єднаний з позитивним входом блока суматора, а вихід блока суматора з'єднаний з входом регулятора напруги тягового генератора, вихід якого з'єднаний з входом формувача імпульсів керування ключем регулювання збудження тягового генератора, а вихід формувача імпульсів керування ключем регулювання збудження тягового генератора з'єднаний з ключем регулювання збудження тяговою генератора, вихід датчика вхідного струму автономного інвертора з'єднаний з першим входом блока розрахунку та фільтрації зворотних зв'язків, вихід датчика вхідної напруги автономного інвертора з'єднаний з другим входом блока розрахунку та фільтрації зворотних зв'язків, вихід датчиків фазних струмів асинхронного двигуна з'єднані з третім входом блока розрахунку та фільтрації зворотних зв'язків, вихід датчика частоти обертання ротора асинхронного двигуна з'єднаний з четвертим входом блока розрахунку та фільтрації зворотних зв'язків, перший вихід блока датчиків величини та частоти лінійної напруги тягового генератора з'єднаний з входом калькулятора обмеження напруги тягового генератора, другий вихід блока датчиків величини та частоти лінійної напруги тягового генератора з'єднаний з від'ємним входом блока суматора.
Текст
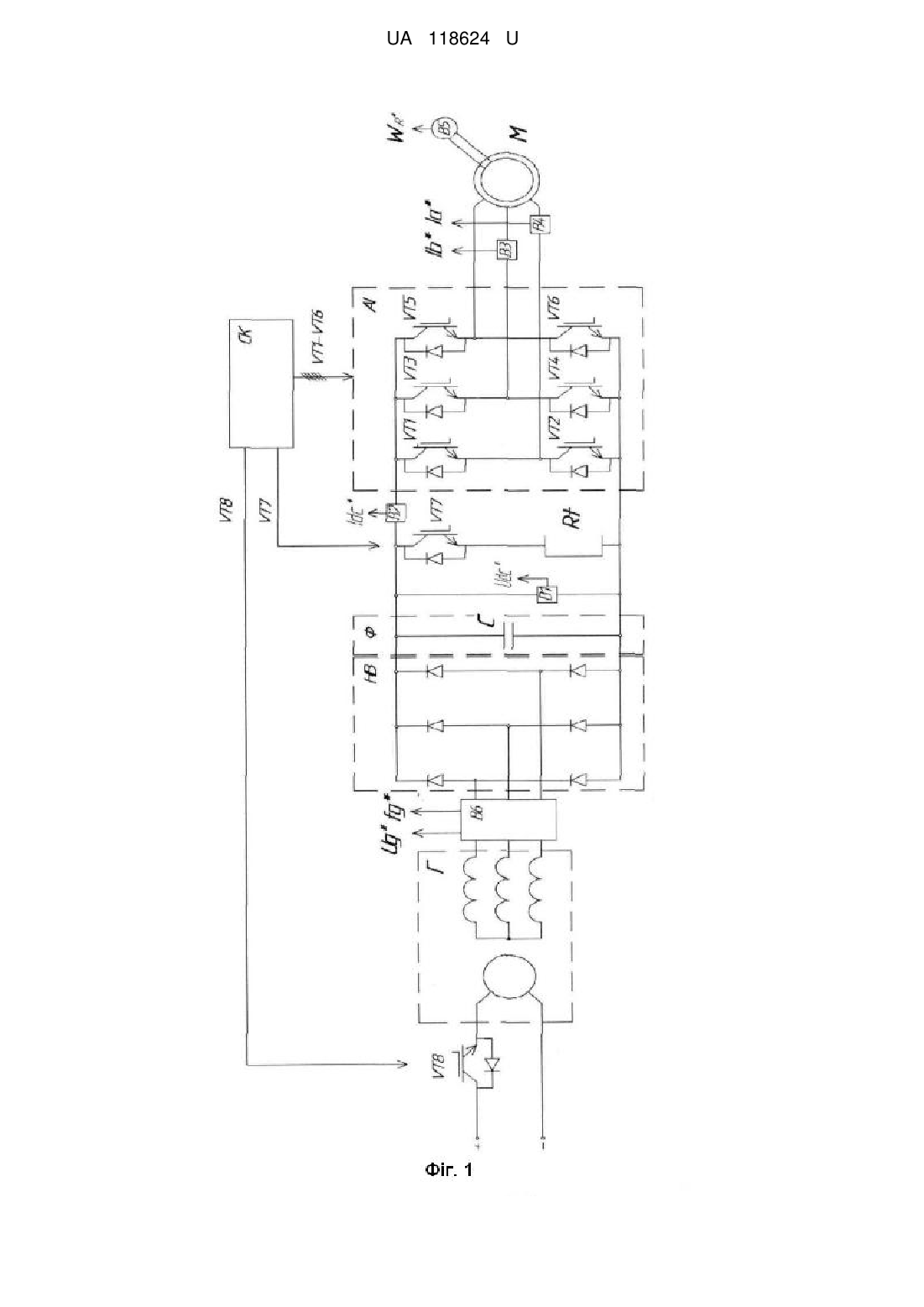
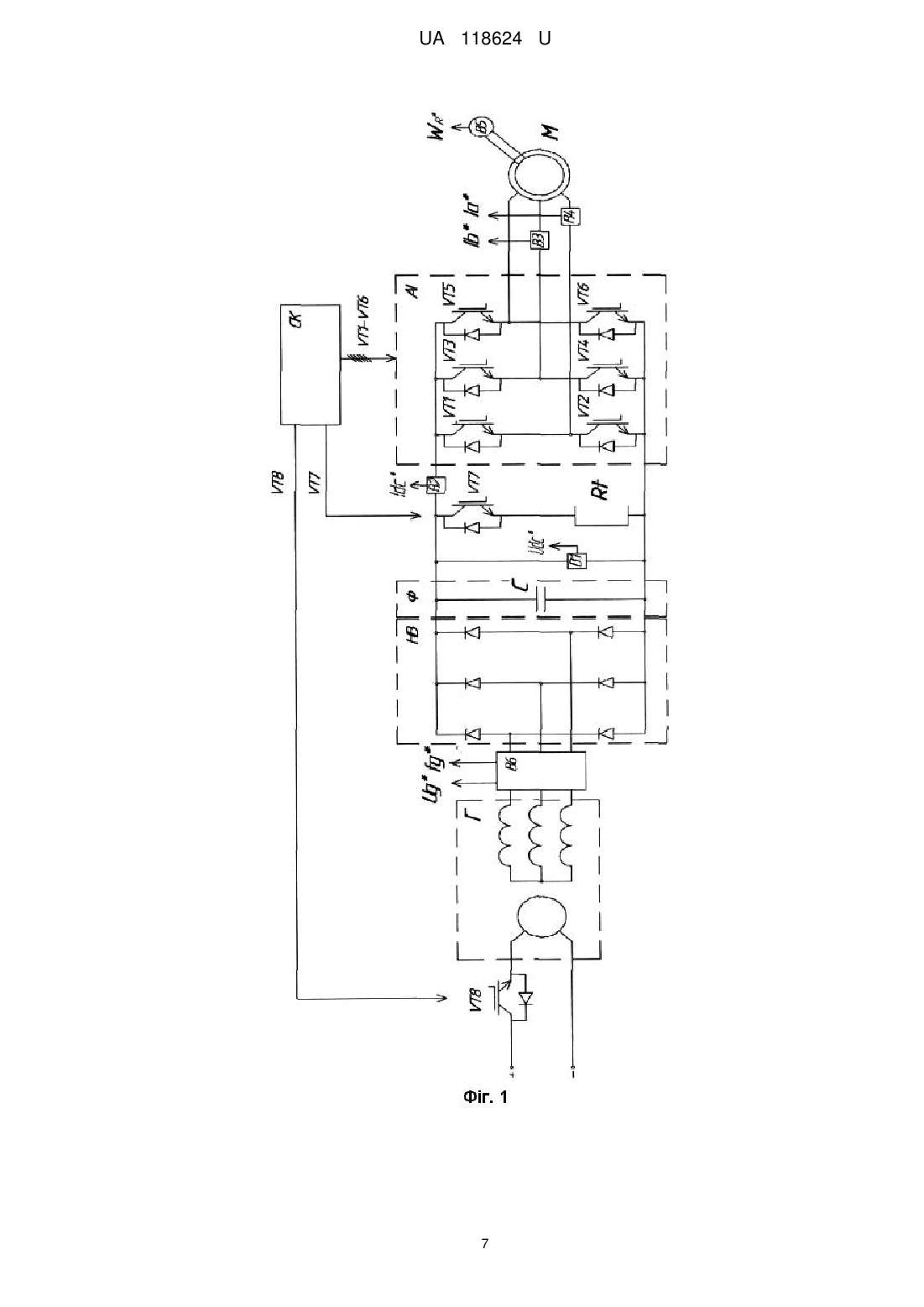
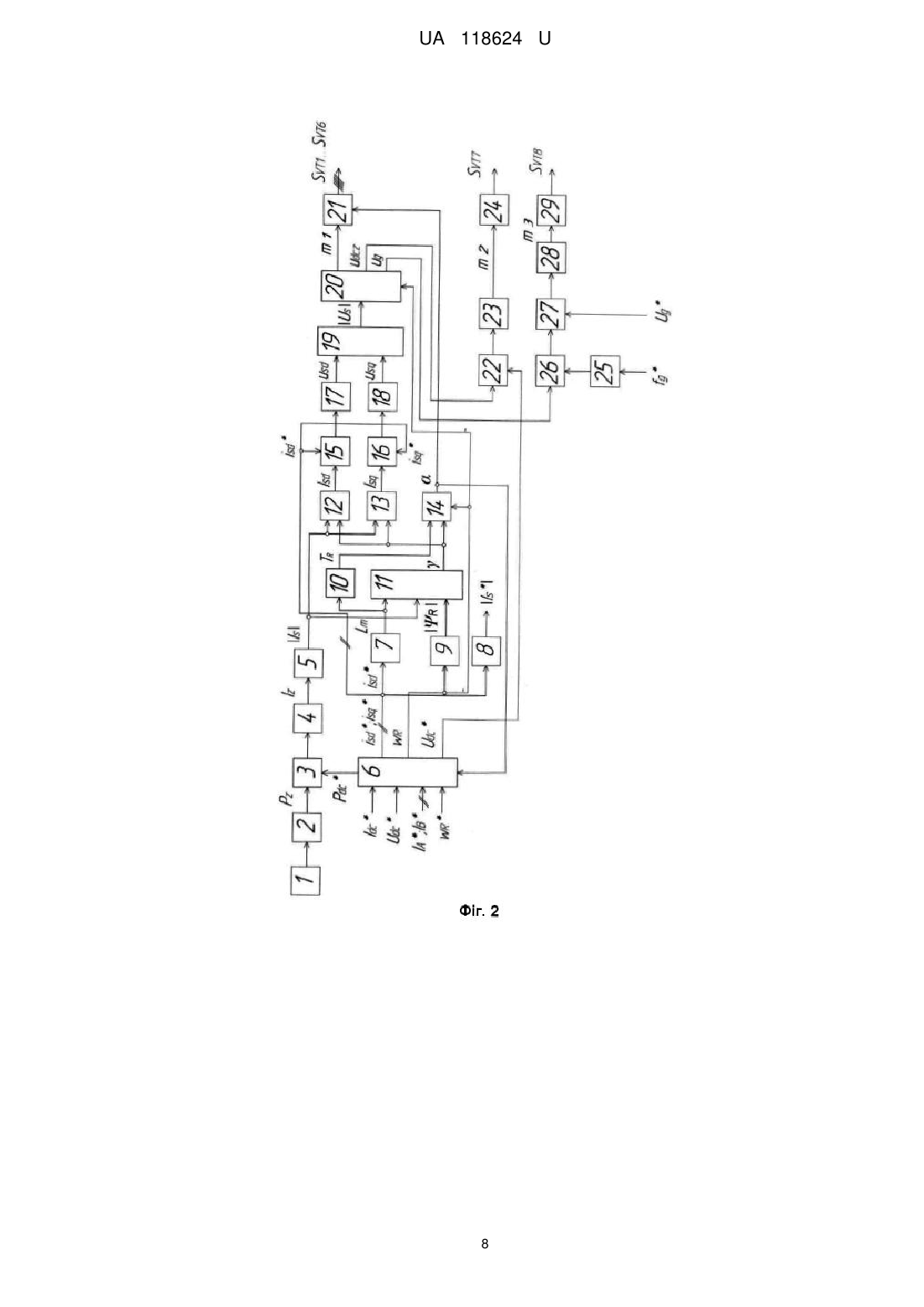
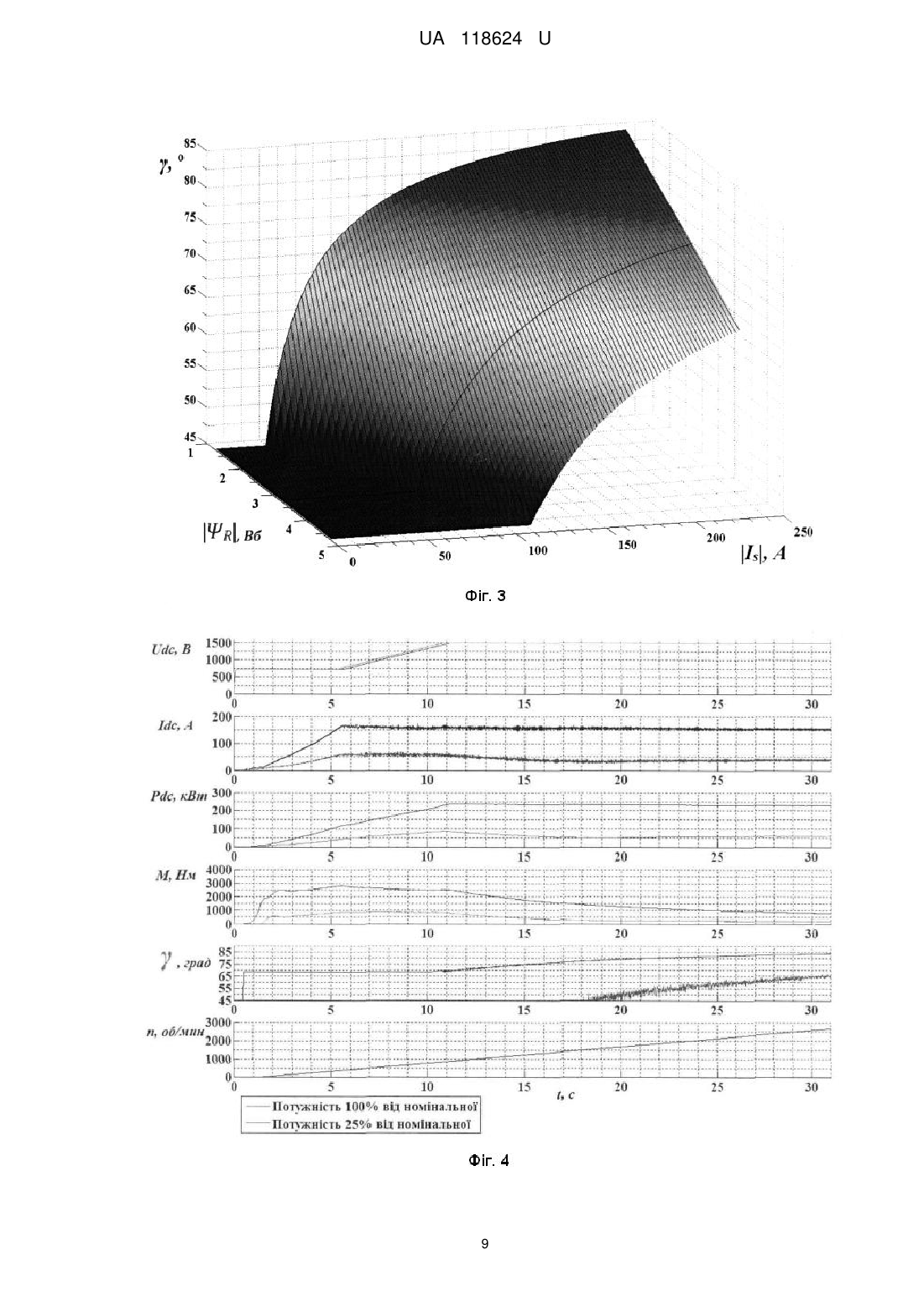
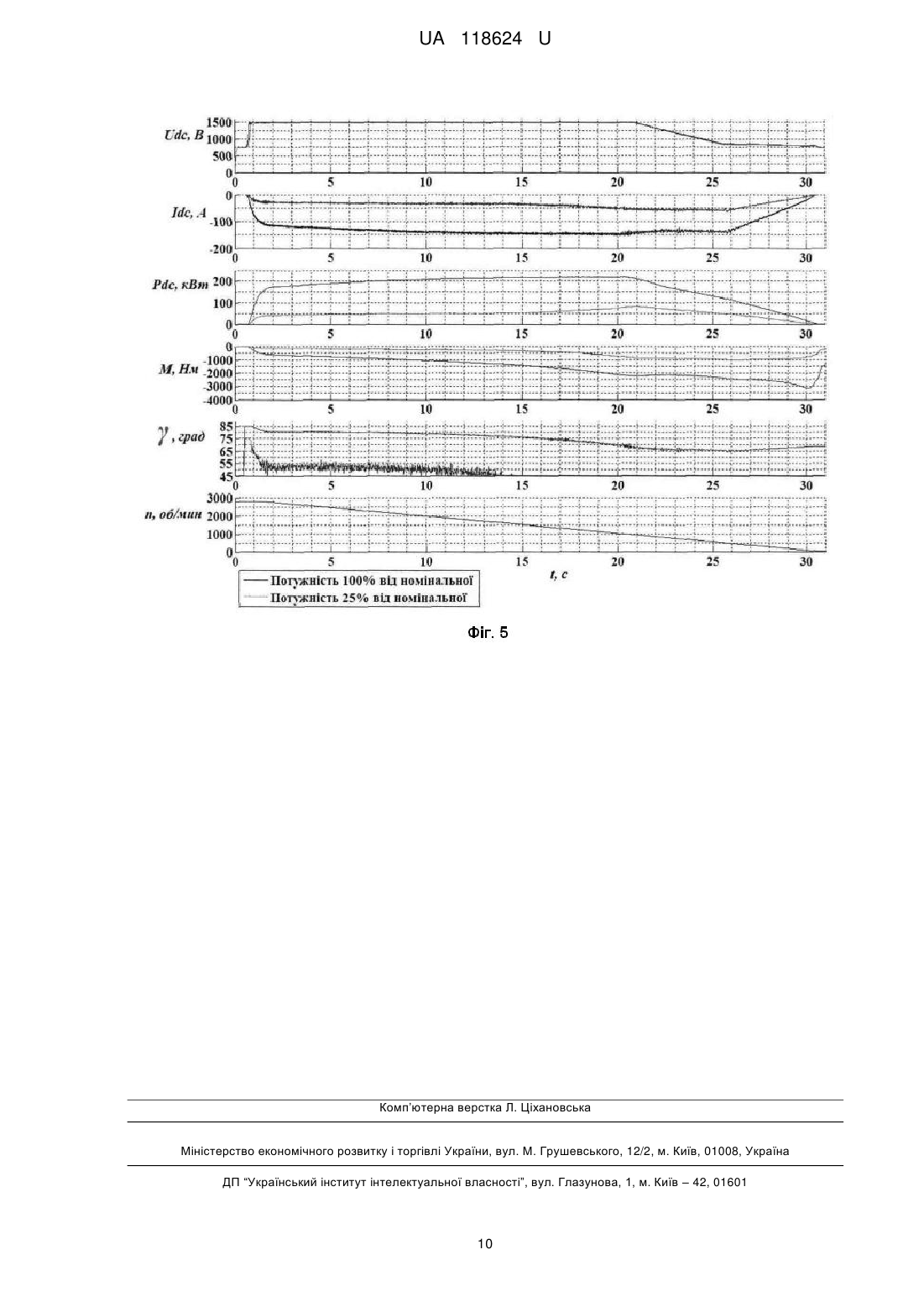
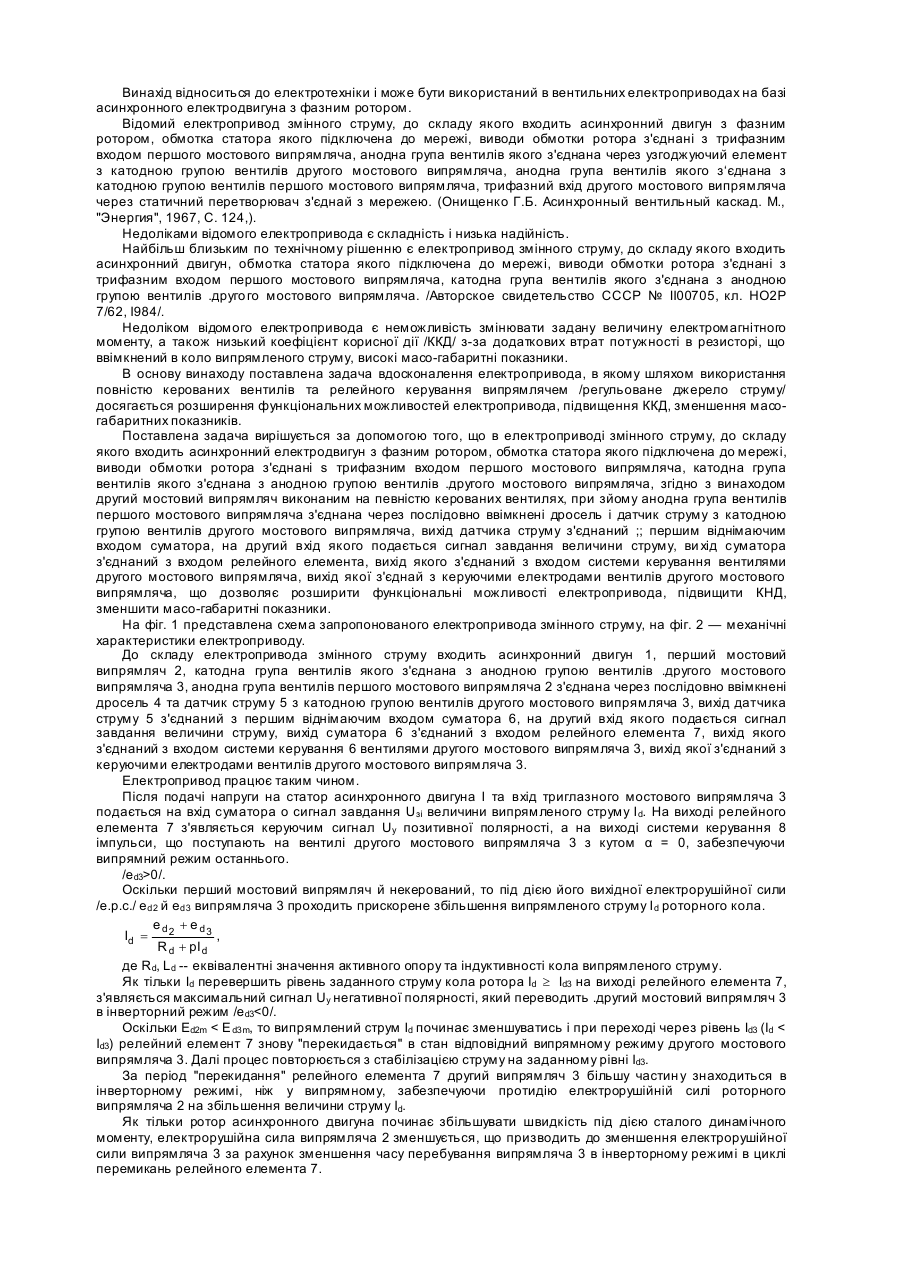
Реферат: UA 118624 U UA 118624 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки, а саме до електроприводів на базі трифазного асинхронного двигуна з короткозамкненим ротором (АД), що живиться від трифазного автономного інвертора напруги (АІ), які працюють в режимі послаблення поля та зі змінною підведеною потужністю, наприклад, тягових електроприводів. Найбільш близьким до пристрою, що заявляється, вибраним за прототип, є "Электропривод переменного тока", патент RU 2254666, МПК Н02Р 7/42, опубл. 20.06.2005, автори Левин П.Н. (RU), Мещеряков В.Н. (RU) патентовласник: Липецкий государственный технический университет (ЛГТУ) (RU), що має в своєму складі трифазний інвертор, два силових виходи якого через датчики фазного струму підключені до двох статорних обмоток асинхронного двигуна, а керуючі виходи інвертора з'єднані з виходом блока формувача імпульсів, датчик швидкості, встановлений на валу асинхронного двигуна, вихід якого з'єднаний з від'ємним входом блока порівняння, позитивним вхід якого підключений до блока задання швидкості, а вихід блока порівняння підключений до входу пропорційно-інтегрального регулятора швидкості, третій силовий вихід інвертора напряму з'єднаний з третьою обмоткою статора двигуна, вихід регулятора швидкості з'єднаний з входом регулятора моменту, вихід якого підключений до першого входу блока формування задання миттєвих значень потокозчеплення ротора, що має три фазних входи, кожний з яких з'єднаний з позитивним входом одного з трьох фазних блоків порівняння, від'ємні входи яких з'єднані з фазними блоками розрахунку потоку фази ротора, а виходи трьох фазних блоків порівняння потоку з'єднані з входами регуляторів фазних потоків ротора двигуна, виходи яких надходять на три перші входи блока ШІМ-регулятора струму, шість виходів якого з'єднані з шістьома керуючими входами трифазного інвертора, виходи двох датчиків струму з'єднані з входом суматора струмів, а також з'єднані з двома входами блока ШІМ-регулятора струму, а також з'єднані з входами двох фазних блоків розрахунку потоку фази ротора двигуна, вихід суматора струмів з'єднаний з входом третього фазного блока розрахунку потоку фази ротора та входом ШІМ-регулятора струму, виходи блоків розрахунку потоків фаз ротора з'єднані з від'ємними входами трьох фазних блоків порівняння потоків ротора, вихід пропорційно-інтегрального регулятора швидкості з'єднаний з першим входом блоку задання тангенса кута, вихід якого з'єднаний з першим входом блоку формування частоти обертання магнітного потоку ротора, другий вхід якого з'єднаний з виходом датчика швидкості, вихід блока формування частоти обертання магнітного потоку ротора з'єднаний з другим входом блока формування задання миттєвих значень потокозчеплення ротора, а також з'єднаний з першим входом блока розрахунку ковзання, вихід датчика швидкості з'єднаний з другим блоком постійної часу інтегрування, вихід якого з'єднаний з трьома блоками регуляторів фазних потоків ротора та трьома фазними блоками розрахунку потоку ротора. Недоліком прототипу є відсутність можливості роботи електроприводу змінного струму при частотах обертання ротора АД більше за номінальну (режим послаблення поля) та відсутність можливості роботи електроприводу змінного струму при зміні величини підведеної потужності з кутом навантаження, що забезпечує роботу електропривода змінного струму з мінімальними втратами енергії. В основу корисної моделі поставлена задача розробки електроприводу змінного струму, який реалізує роботу в режимі послаблення поля та мінімізує втрати енергії при роботі електроприводу у всьому діапазоні зміни моменту навантаження та підведеної потужності до АД за рахунок визначення оптимального кута навантаження γ, що визначає положення вектору струму статора асинхронного двигуна відносно опорного вектора потокозчеплення ротора, безпосередньо у процесі роботи. Поставлена задача вирішується у електроприводі змінного струму, який складається з трифазного автономного інвертора напруги, датчиків струмів фаз та датчика частоти обертання ротора асинхронного двигуна, асинхронного двигуна з короткозамкненим ротором, регульованого джерела живлення (тяговий генератор з некерованим випрямлячем), блока датчиків величини та частоти лінійної напруги тягового генератора, проміжного фільтра, гальмівного ключа, гальмівного резистора, ключа регулювання збудженням тягового генератора та системи керування. Система керування асинхронним двигуном будується на базі диференційних рівнянь стану АД з урахуванням кута навантаження , що визначає положення вектора струму статора відносно опорного вектора потокозчеплення ротора АД та складається з блока задання потужності, калькулятора потужності, регулятора потужності, калькулятора задання модуля вектора струму статора, блока розрахунку та фільтрації зворотних зв'язків, калькулятора поточного значення величини індуктивності намагнічування, калькулятора поточного значення модуля вектора струму статора, калькулятора модуля вектора потокозчеплення ротора, калькулятора величини постійної часу ротора, калькулятора кута навантаження, калькулятора задання повздовжньої проекції вектора струму статора, 1 UA 118624 U 5 10 15 20 25 30 35 40 45 50 55 60 калькулятора задання поперечної проекції вектора струму статора, калькулятора поточного кута положення системи координат, регулятора повздовжньої проекції вектора струму статора, регулятора поперечної проекції вектора струму статора, блока компенсації та розрахунку модуля вектора напруги статора, калькулятора напруг, регулятора гальмівної провідності, калькулятора обмеження лінійної напруги тягового генератора, регулятора напруги тягового генератора, п'яти блоків суматорів, блока пошуку "min", трьох блоків формувачів імпульсів керування, вихідні сигнали яких подаються на шість ключів автономного інвертора, ключ регулювання збудження тягового генератора, гальмівний ключ. Корисна модель пояснюється кресленнями: Фіг. 1 - схема електроприводу змінного струму з системою керування; Фіг. 2 - структурна схема системи керування електроприводом змінного струму; Фіг. 3 - функція кута навантаження залежно від підведеної потужності та частоти обертання ротора АД; Фіг. 4 - осцилограми вхідних напруги, струму та потужності АI, фазних струмів та частоти обертання ротора АД в режимі тяги; Фіг. 5 - осцилограми вхідних напруги, струму та потужності АІ, фазних струмів та частоти обертання ротора АД в режимі ЕДГ. Схема електроприводу змінного струму, що зображена на фігурі 1, складається з трифазного автономного інвертора напруги АІ, датчиків струмів фаз В3, В4 та датчика частоти обертання ротора асинхронного двигуна В5, асинхронного двигуна з короткозамкнемим ротором М, системи керування СК, тягового генератора Г, некерованого випрямляча НВ, блока датчиків величини та частоти лінійної напруги тягового генератора В6, проміжного фільтра Ф, гальмівного ключа VT7, гальмівної провідності Rt, ключа регулювання збудженням тягового генератора VT8, датчика вхідного струму ΑΙ Β2, датчика вхідної напруги АІ ВІ. Система керування електроприводом змінного струму фіг. 2 складається з задатчика потужності 1, що з'єднаний з калькулятором потужності 2, вихід якого з'єднаний з позитивним входом блока суматора 3, а від'ємний вхід блока суматора з'єднаний з першим виходом блока розрахунку та фільтрації зворотних зв'язків 6, вихід блока суматора з'єднаний і регулятором потужності 4, вихід якого з'єднаний з входом калькулятора задання модуля вектора струму статора 5, вихід якого з'єднаний з входами калькуляторів повздовжньої та поперечної проекцій вектора струму статора 12, 13 та з другим входом калькулятора кута навантаження 11, а другий вихід блока розрахунку та фільтрації зворотних зв'язків 6 з'єднаний з входом калькулятора поточного значення величини індуктивності намагнічування 7, вихід якого з'єднаний з входами калькулятора величини постійної часу ротора 10 та першим входом калькулятора кута навантаження 11, також другий вихід блока розрахунку та фільтрації зворотних зв'язків 6 з'єднаний з калькулятором поточного значення модуля вектора струму статора 8, а третій вихід блока розрахунку та фільтрації зворотних зв'язків 6 з'єднаний з входом калькулятора модуля вектора потокозчеплення ротора 9, вихід якого з'єднаний з третім входом калькулятора кута навантаження 11, вихід якого з'єднаний з другим входом калькулятора задання повздовжньої проекції вектора струму статора 12, другим входом калькулятора задання поперечної проекції вектора струму статора 13, а також другим входом калькулятора поточного кута положення системи координат 14, а перший вхід калькулятора поточного кута положення системи координат 14 з'єднаний з виходом калькулятора постійної часу ротора 10, а третій вхід калькулятора поточного кута положення системи координат 14 з'єднаний з третім виходом блока розрахунку та фільтрації зворотних зв'язків 6, вихід калькулятора задання повздовжньої проекції вектора струму статора 12 з'єднаний з позитивним входом блока суматора 15, а вихід калькулятора задання поперечної проекції вектора струму статора 13 з'єднаний з позитивним входом іншого блока суматора 16, а від'ємні входи блоків суматорів 15 та 16 з'єднані з другим входом блока розрахунку та фільтрації зворотних зв'язків 6, виходи блоків суматорів 15 та 16 з'єднані з входами регуляторів повздовжньої та поперечної проекції вектора струму статора 17 та 18 відповідно, виходи яких надходять на два входи блока компенсації та розрахунку модуля вектора напруги статора 19, вихід якого знаний з першим входом калькулятора напруг 20, а другий вхід калькулятора напруг з'єднаний з третім виходом блока розрахунку та фільтрації зворотних зв'язків 6, перший вихід калькулятора напруг 20 з'єднаний з входом блока формувача імпульсів керування ключами автономного інвертора напруги 21, а другий вхід блока формувача імпульсів керування ключами автономного інвертора напруги з'єднаний з виходом блока калькулятора поточного кута положення системи координат 14, також виходом блока калькулятора поточного кута положення системи координат 14 з'єднаний з п'ятим входом блока розрахунку та фільтрації зворотних зв'язків 6, шість виходів блока формувача імпульсів керування ключами автономного інвертора напруги 21 з'єднані з шістьома ключами 2 UA 118624 U 5 10 15 20 25 30 35 40 45 50 55 автономного інвертора напруги SVT1-SVT6, Другий вихід калькулятора напруг 20 з'єднаний з позитивним входом блока суматора 22, а від'ємний вхід блока суматора 22 з'єднаний з четвертим виходом блока розрахунку та фільтрації зворотних зв'язків 6, а вихід блока суматора 6 з'єднаний з входом регулятора гальмівної провідності 23, вихід якого з'єднаний з входом формувача імпульсів керування гальмівним ключем 24, а вихід блока формувача імпульсів керування гальмівним ключем 24 з'єднаний з гальмівним ключем SVT7, третій вихід калькулятора напруг 20 з'єднаний з першим входом блока пошуку "min" 26, а другий вхід блока пошуку "min" 26 з'єднаний з виходом калькулятора обмеження лінійної напруги тягового генератора 25, вихід блока пошуку "min" 26 з'єднаний з позитивним входом блока суматора 27, а вихід блока суматора 27 з'єднаний з входом регулятора напруги тягового генератора 28, вихід якого з'єднаний з входом формувача імпульсів керування ключем регулювання збудження тягового генератора 29, а вихід формувача імпульсів керування ключем регулювання збудження тягового генератора з'єднаний з ключем регулювання збудження тягового генератора SVT8, вихід датчика вхідного струму автономного інвертора В2 з'єднаний з першим входом блока розрахунку та фільтрації зворотних зв'язків 6, вихід датчика вхідної напруги автономного інвертора В1 з'єднаний з другим входом блока розрахунку та фільтрації зворотних зв'язків 6, виходи датчиків фазних струмів асинхронного двигуна В3 та В4 з'єднані з третім входом блока розрахунку та фільтрації зворотних зв'язків 6, вихід датчика частоти обертання ротора асинхронного двигуна В5 з'єднаний з четвертим входом блока розрахунку та фільтрації зворотних зв'язків 6, перший вихід блока датчиків величини та частоти лінійної напруги тягового генератора В6 з'єднаний з входом калькулятора обмеження напруги тягового генератора 25, другий вихід блока датчиків величини та частоти лінійної напруги тягового генератора В6 з'єднаний з від'ємним входом блока суматора 27. Система керування електроприводом змінного струму та працює наступним чином; задатчик потужності 1 формує сигнал задання в діапазоні від 0 до 1 при умові роботи асинхронного двигуна в режимі тяги або в діапазоні від 0 до -1 при умові роботи АД в режимі електродинамічного гальмування. Цей сигнал надходить на вхід блока калькулятора потужності 2. В блоці 2 відбувається формування дискретних сигналів режимів роботи АД залежно від знаку вхідного сигналу та формування сигналу задання потужності Pz в діапазоні від 0 до 1, що надходить на вхід блока суматора 3. Також на вхід блока 3 надходить від'ємний сигнал потужності, що споживається АІ Pdc * . Вихідним сигналом блока 3 є сигнал відхилення величини потужності, що споживається АІ, від сигналу задання. Сигнал відхилення надходить на вхід регулятора потужності 4. Вихідним сигналом регулятора потужності є величина задання модуля вектора струму статора I z в діапазоні від 0 до 1, що надходить на вхід блока калькулятора модуля вектора струму статора 5. У блоці 5 залежно від базової величини струму статора виконується розрахунок модуля вектора струму статора Is . При необхідності, у цьому блоці виконується також обмеження модуля вектора струму статора в функції частоти обертання ротора АД. Вихідними сигналами блока розрахунку та фільтрації зворотних зв'язків 6 є сигнал вхідного струму ΑΙ Idc * з датчика струму В2, сигнал вхідної напруги АІ Udc * з датчика напруги В1, сигнали струмів фаз Α IA * та В IB * з датчиків струмів В4 та В3 відповідно, сигнал частоти обертання ротора АД R * з датчика В5. У блоці 6 відбувається фільтрація вхідних сигналів та з урахуванням поточного кута положення системи координат , що розраховується в блоці калькулятора 14, перевід системи струмів з датчиків струмів фаз А та В у систему в ортогональних осях dq , що орієнтована віссю d по напрямку вектора потокозчеплення ротора АД. Вихідні сигнали поточних проекцій вектора струму на осі d та q - isd * та isd * надходять на вхід блока калькулятора поточного значення модуля вектора струму статора 8, сигнал поточної проекції струму статора на повздовжню вісь d isd * подається на вхід блока калькулятора індуктивності намагнічування 7, що виконує розрахунок поточного значення Lm з урахуванням кривої намагнічування, що може бути апроксимована будь-яким відомим способом, залежно від необхідної точності та обчислювальної потужності процесора системи керування. Автором був використаний поліноміальний метод апроксимації кривої намагнічування. Вихідним сигналом блока 7 є сигнал поточного значення величини індуктивності намагнічування Lm , що надходить на входи блоків калькулятора постійної часу ротора TR 10 та калькулятора куга положення вектора струму статора відносно вектора потокозчеплення ротора 11. Вхідним сигналом блока калькулятора модуля вектора 3 UA 118624 U потокозчеплення ротора 9 є сигнал частоти обертання ротора R , що є вихідним для блока 6. У блоці 9 відбувається розрахунок значення модуля вектора потокозчеплення ротора АД R залежно від частоти обертання ротора АД. Функція R f R складається з двох ділянок: лінійної, що відповідає номінальному значенню 5 R та нелінійної, що починається при перевищенні частоти обертання ротора АД понад номінальну, та перехід у режим "послаблення поля". Нелінійна ділянка апроксимована поліноміальним методом. У блоці 11 відбувається розрахунок положення вектора струму статора відносно опорного вектора потокозчеплення ротора за формулою: arccos R Is Lm (1) 10 Де R - модуль вектора потокозчеплення ротора АД; Is - модуль вектора струму статора АД; Lm - індуктивність намагнічування АД. 15 Отримане значення обмежується в діапазоні від 45° до
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 21/02
Мітки: змінного, струму, електропривід
Код посилання
<a href="https://ua.patents.su/12-118624-elektroprivid-zminnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Електропривід змінного струму</a>
Електропривід змінного струму
Номер патенту: 63254
Опубліковано: 15.01.2004
Автори: Самчелєєв Юрій Павлович, Карпук Ігор Анатолійович, Шевченко Іван Степанович, Скурятін Юрій Васильович
Мітки: струму, електропривід, змінного
Формула / Реферат:
Електропривід змінного струму, до складу якого входить асинхронний електродвигун з фазним ротором, обмотка статора якого підключена до мережі, виводи обмотки ротора з’єднані з трифазним входом першого мостового випрямляча, катодна група вентилів якого з’єднана з анодною групою вентилів другого мостового випрямляча, який відрізняється тим, що другий мостовий випрямляч виконаний на повністю керованих вентилях, при цьому анодна група вентилів...
Електропривід змінного струму
Номер патенту: 73605
Опубліковано: 15.08.2005
Автори: Скурятін Юрій Васильович, Шевченко Іван Степанович, Самчелєєв Юрій Павлович, Карпук Ігор Анатолійович
МПК: H02P 23/00, H02P 25/16
Мітки: струму, змінного, електропривід
Формула / Реферат:
Електропривід змінного струму, до складу якого входить асинхронний електродвигун з фазним ротором, обмотка статора якого підключена до мережі, перший мостовий випрямляч, трифазний вхід якого з'єднаний з обмотками ротора, другий мостовий випрямляч, анодна група вентилів якого з'єднана з катодною групою вентилів першого мостового випрямляча, установлений на валу двигуна датчик швидкості, вихід якого з'єднаний з першим віднімаючим входом першого...
Електропривід змінного струму
Номер патенту: 58150
Опубліковано: 15.07.2003
Автори: Шевченко Іван Степанович, Самчелєєв Юрій Павлович, Карпук Ігор Анатолійович, Потапов Володимир Дмитрович
МПК: H02P 21/00, H02P 7/00, H02P 23/10, H02P 1/00
Мітки: електропривід, змінного, струму
Формула / Реферат:
Електропривід змінного струму, що містить асинхронний двигун з фазним ротором, виводи якого під'єднані до першого трифазного мостового випрямляча, індуктивно-ємнісний перетворювач, вхід якого з'єднаний з трифазною мережею, а вихід під'єднаний до входу другого трифазного некерованого мостового випрямляча, при цьому мости з'єднані послідовно з співпадаючою провідністю їх вентилів, який відрізняється тим, що перший трифазний мостовий випрямляч...
Електропривід змінного струму

Номер патенту: 57051
Опубліковано: 16.06.2003
Автори: ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ, Ленська Олена Олександрівна
МПК: H02P 27/04
Мітки: електропривід, струму, змінного
Формула / Реферат:
1. Електропривід змінного струму, який містить асинхронний двигун з фазним ротором, в якому обмотки кожної фази ротора поділені на частини, в загальному випадку нерівні, які з'єднані за схемою противмикання, обмотки фаз з'єднані в зірку, який відрізняється тим, що містить мостовий випрямляч, який підключений до вузлів з'єднання частин роторних обмоток.2. Електропривід за п.1, який відрізняється тим, що мостовий випрямляч є керованим, а...
Електропривід змінного струму для вагоноштовхача
Номер патенту: 77689
Опубліковано: 15.01.2007
Автор: Долгов Юрій Леонідович
Мітки: змінного, вагоноштовхача, струму, електропривід
Формула / Реферат:
Електропривід змінного струму для вагоноштовхача, що містить асинхронний двигун з фазним ротором і релейно-контакторним дистанційним керуванням по чотирьох тролеях і засоби гальмування, який відрізняється тим, що у ланцюг ротора двигуна введені нерегульовані резистори, засоби гальмування містять однофазний електромагніт, вимикачі гальм і пристрої подачі постійного струму, котрий гальванічно роз’вязаний з мережею трифазного струму, причому два...
Попередній патент: Спосіб приготування вафельних трубочок з начинкою
Наступний патент: Мінеральне мікродобриво гранульоване
Випадковий патент: Консорціум штамів агробактерій для виготовлення бактеріального добрива під шовковицю