Вантажозахватний пристрій
Формула / Реферат
(57) Грузозахватное устройство, преимущественно для пищевых продуктов, содержащее присоединяемый к подьемному механизму корпус, захватные лапы, две из которых расположены на горизонтальных осях в параллельных плоскостях на одном конце корпуса, а третья расположена на другом конце корпуса между первыми двумя лапами, и приводы перемещения последних, отличающееся тем, что оно снабжено расположенными перпендикулярно третьей лапе и закрепленными в корпусе продольно валами, выполненными с поперечными отверстиями на одних концах, в которых расположены горизонтальные оси первых двух захватных лап, и приводными зажимными органами, шарнирно закрепленными на концах первых двух захватных лап, а третья захватная лапа жестко закреплена на корпусе.
Текст
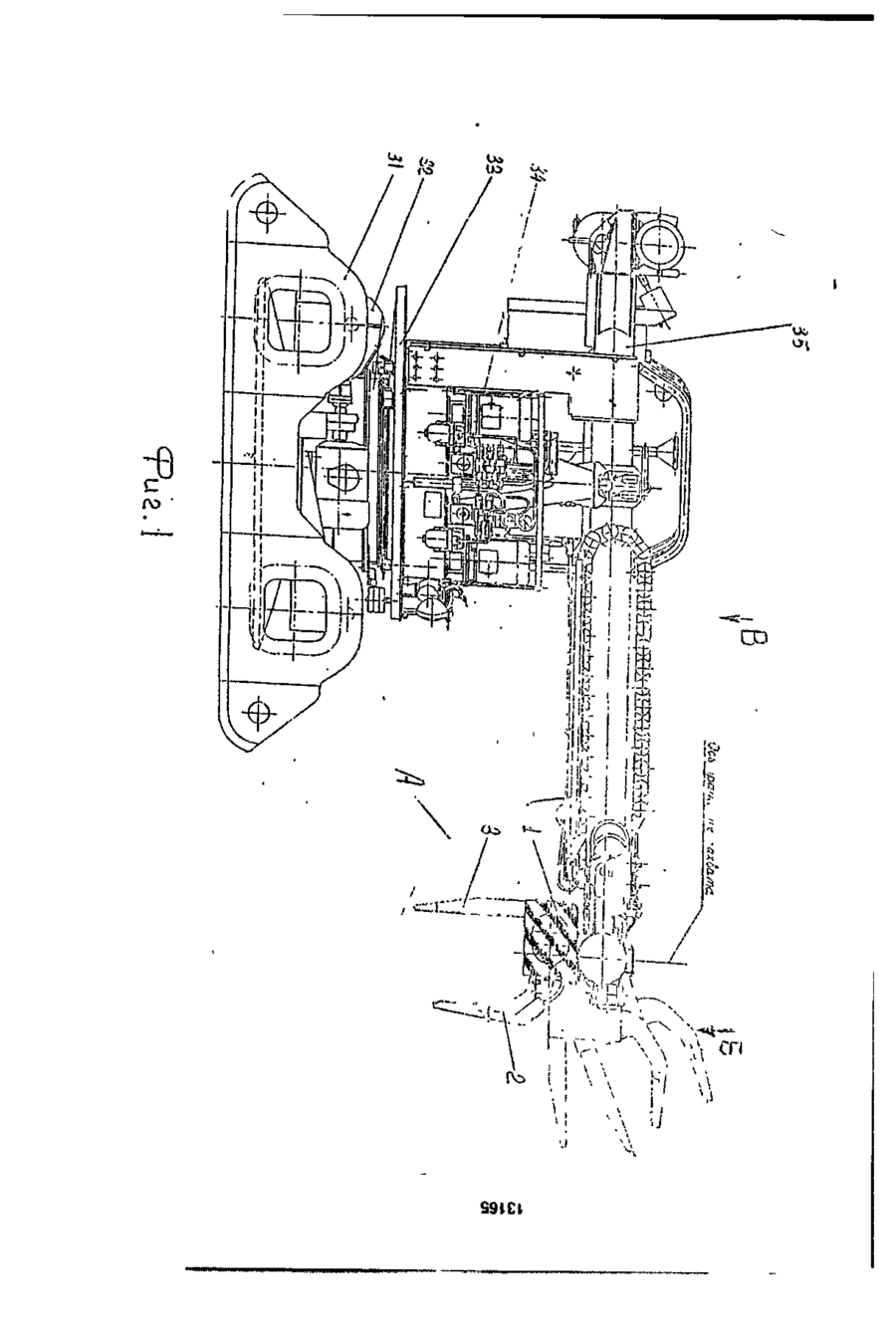
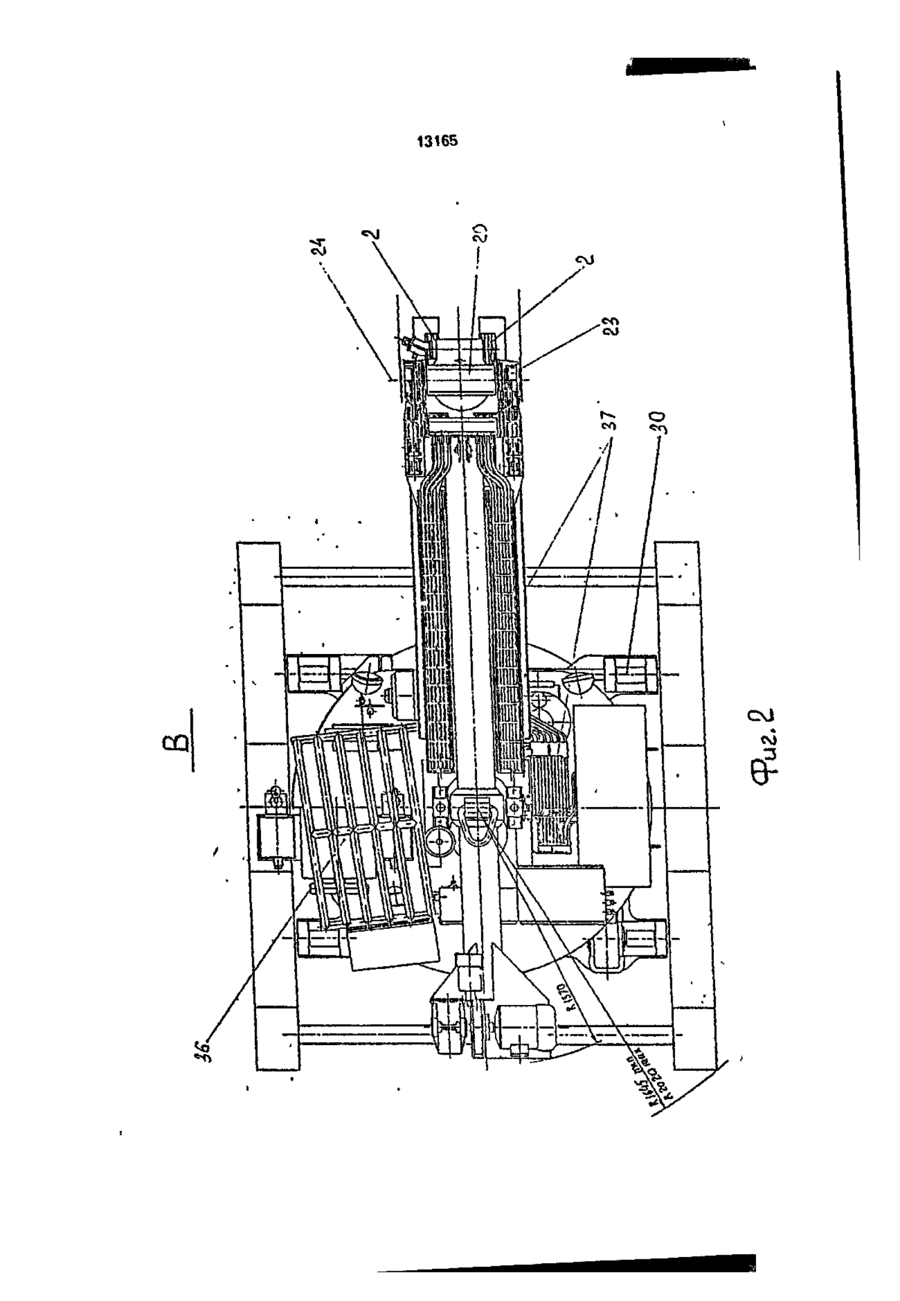
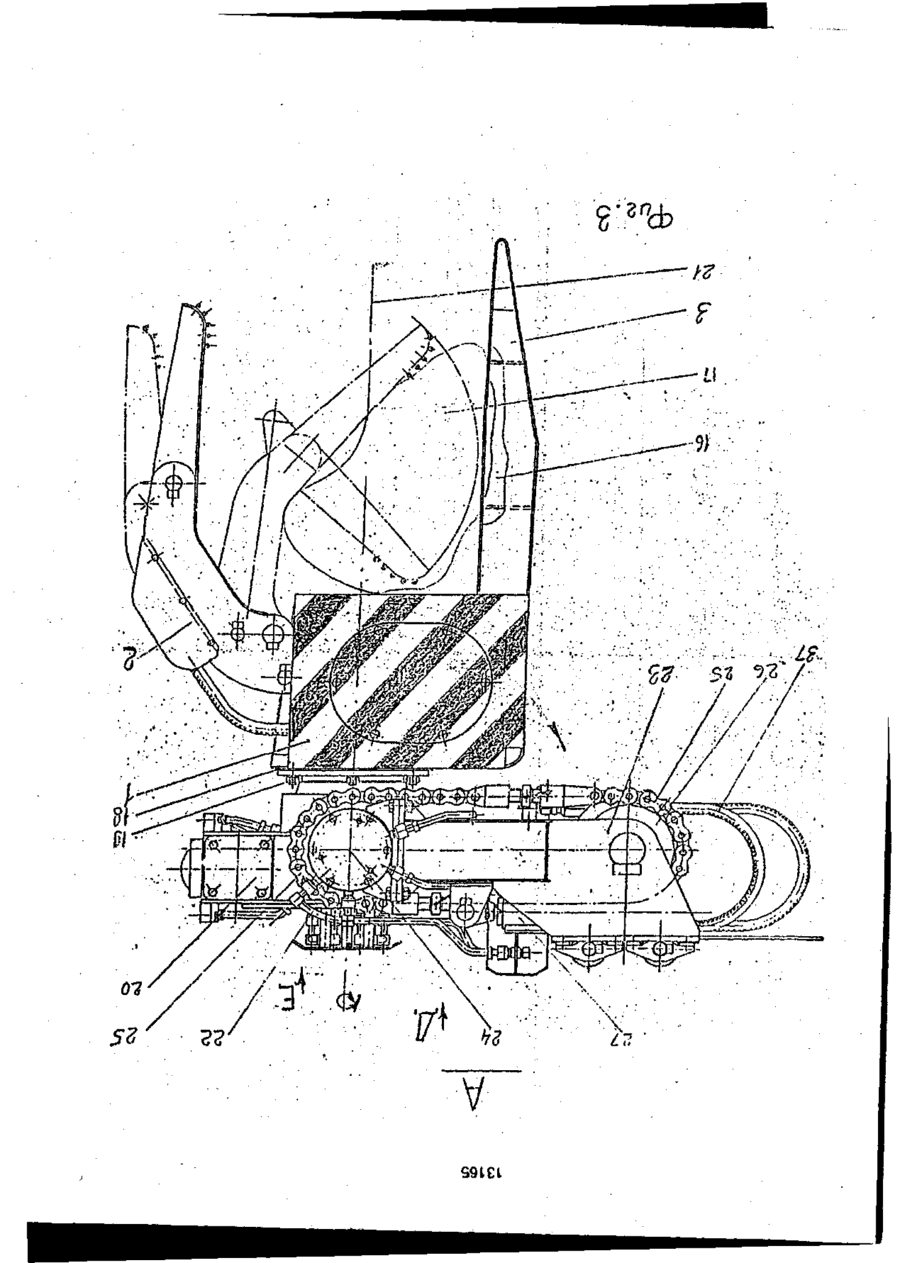
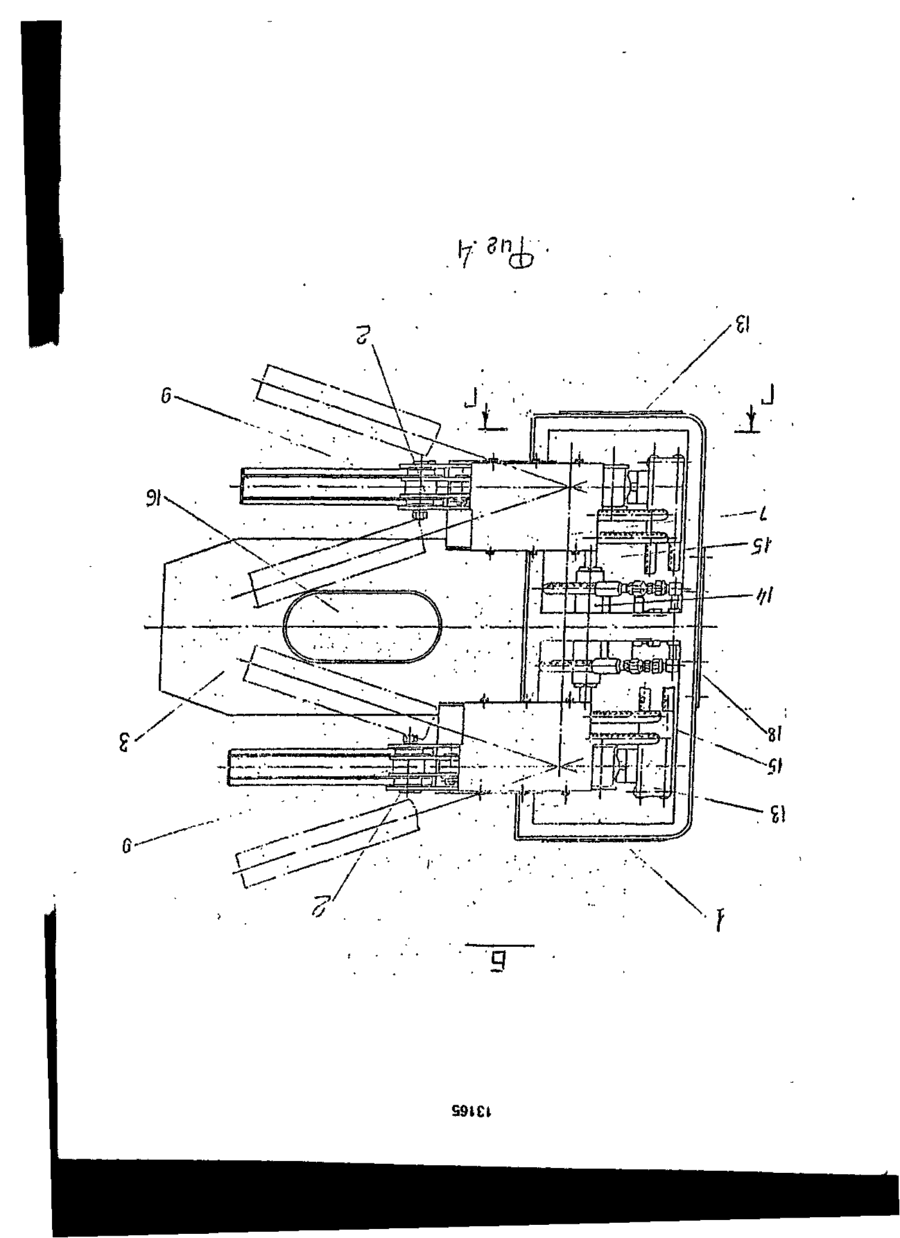
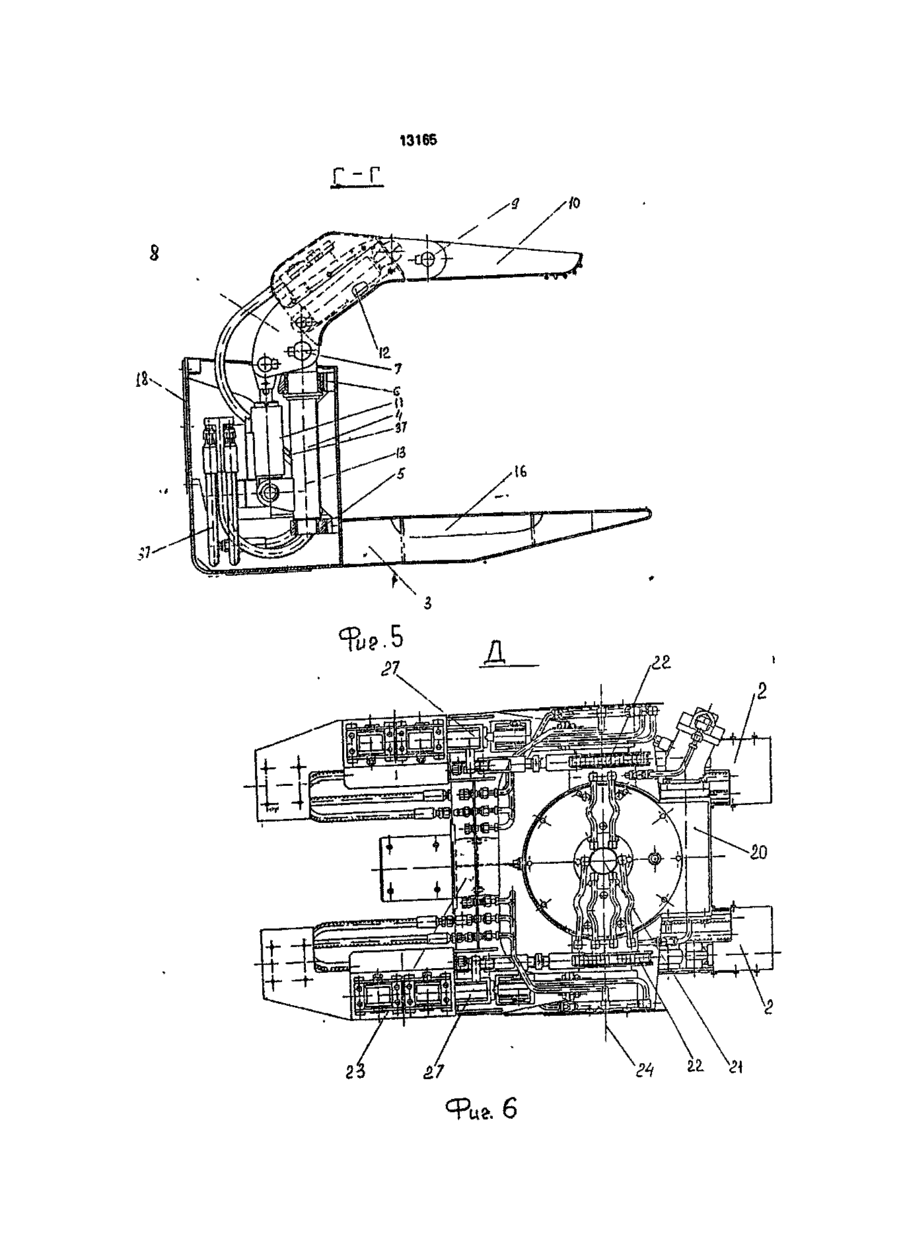
Грузозахватное устройство, преимущественно для пищевых продуктов, содержащее присоединяемый к подьемному механизму корпус, захватные лапы, две из которых рас положены на горизонтальных осях в параллельных плоскостях на одном конце корпуса, а третья расположена на другом конце корпуса между первыми двумя лапами, и приводы перемещения последних, О т л и ч а ю щ е е с я тем, что оно снабжено расположенными перпендикулярно третьей лапе и закрепленными в корпусе продольно валами, выполненными с поперечными отверстиями на одних концах, в которых расположены горизонтальные оси первых двух захватных лап, и приводными зажимными органами, шарнирно закрепленными на концах первых двух захватных лап, а третья захватная лапа жестко закреплена на корпусе. С > со Изобретение относится к грузозахватным устройствам и может быть использовано при погрузочно-разгрузочных работах с различными грузами, в том числе неправильной формы, например, мороженое неразделанное мясо, в составе грузоподъемных машин типа "манипулятор" в различных отраслях народного хозяйства. Известно грузозахватное устройство, включающее присоединяемый к грузоподъемному механизму корпус и связанные с ним три лапы, две из которых шарнирно закреплены на одном конце корпуса, а третья закреплена на другом конце корпуса между первыми двумя. Все лапы выполнены однозвенными, причем шарнирно закрепленные имеют возможность поворачиваться относительно поперечных осей. Захватывание груза осуществляется методом грейфера. При этом захватывание груза с размером в месте захвата, меньшим расстояния между шарнирно закрепленными лапами невозможно, так как в связи с этим груз "проваливается" между лапами. Кроме того, выполнение лап однозвенными не позволяет обхватить груз, что иногда приводит к его выпадению в процессе переноса, снижая надежность захвата. Целью изобретения является повышение надежности захвата. Указанная цель достигается тем, что устройство снабжено расположенными перпендикулярно третьей лапе и закрепленными в корпусе валами, выполненными с поперечными отверстиями на одних концах, в которых расположены горизонтальные оси первых двух захватных лап и приводными зажимными органами (гидроцилиндрами), шарнирно закрепленными на концах первых двух захватных лап, а третья захватная лапа жестко закреплена на корпусе. ел Л. о* О 13165 Перечисленные признаки увеличивают удерживающую способность грузозахватного устройства, повышают надежность захвпта. Конструкция устройства поясняется 5 чертежами, где на фиг.1 изображен общий вид устройства: на фиг.2 - то же, вид сверху: на фиг.З - выносной элемент А фиг.1; на фиг.4 - вид Б на фиг.1, при горизонтальном положении грузозахватного устройства; на 10 фиг.5 - разрез Г-Т на фиг.4; на фиг.6 - вид Д на фиг.З без стрелы манипулятора; на фиг.7 - вид Е на фиг.З (модуль вращения без вилкообразного корпуса): на фиг.8 - вилкообразный корпус, вид сбоку; на фиг.9 - вид 15 И на фиг. 0; на фигЮ - функциональные возможности манипулятора, оборудованного грузозахватным устройством; на фиг.11 положение манипулятора при передвижении (шагании). 20 Устройство включает корпус 1, на котором с одной стороны шарнирно закреплены де? подвижные лапы 2. а с другой стороны жестко одна широкая неподвижная лапа 3. Каждая подвижная лапа включает вал 4, 25 шарнирно закрепленный в опорах 5 и 6, жестко установленных в корпусе. В верхней части вала выполнено отверстие для оси 7, на которой закреплено первое зоено 8 лапы. Нз свободном конце первого звена с по- 30 мощью оси 9 шарнирно закреплено второе звено 10 лапы. Первое звено 8 лапы установлено с возможностью поворота с помощью п р и в о д н о г о зажимного органа (гидроцилиндра) 11, корпус которого за- 35 креплен на валу 4. Второе звено 10 лапы установлено с возможностью поворота с помощью гидроцилиндра 12, корпус которого закреплен на первом звене 8 лапы. Лапа 2 обладает подвижностью относительно двух 40 взаимно перпендикулярных осей: сведение (разведение) относительно осей 13 валов 4 и открытие (закрытие) относительно осей 7 и 9. Сведение (разведение) лап относительно осей 13 выполняется гидроцилиндром 14 45 с двумя штоками, корпус которого шарнирно закреплен на корпусе 1, а штоки 15 шарнирно соединены с валами 4. Неподвижная лапа 3 снабжена отверстием 16, в которое попадает, как в выемку, выпуклость пере- 50 гружаемого груза 17. С помощью фланца 18 и болтов 19 корпус 1 закреплен на выходном валу модуля вращения 20 вокруг оси 21, который представляет собой червячный редуктор. Корпус этого редуктора имеет с 55 двух сторон цапфы с жестко закрепленными концентрично с ними цепными звездочками 22. Цапфы шарнирно закреплены в вилкообразном корпусе 23, в результате чего червячный редуктор, а, значит и все гру зозахватное устройство, может качаться относительно горизонтальной оси 24. Качание осуществляется с помощью пары цепей 52, пары приводных звездочек 26 и пары гидроцилиндров 27. Корпуса этих гидроцилиндров снабжены рейками, которые входят о зацепление с подреечными шестернями. Указанные шестерни жестко связаны с приводными звездочками 26. Эти пары располагаются с двух сторон вилкообразного корпуса 23. С помощью штекерного соединения и болтов (условно не показаны) вилкообразный корпус 23 закреплен на подвижной части 28 стрелы манипулятора 29. Манипулятор содержит ходовую часть 30 шагающего типа, включающую башмаки 31, механизм передвижения 32 и платформу поворотную 33. На поворотной платформе 33 закреплена насосная станция гидропривода 34, качающаяся стрела 35 и пульт управления 36. Управление манипулятором осуществляется с пульта оператором. Подача рабочей жидкости на грузозахватное устройство осуществляется по шлангам 37. коллекторам 38 (вдоль оси 24) и коллектору, расположенному вдоль оси 21 червячного колеса редуктора модуля вращения 20. Устройство работает следующим образом. С помощью гидроцилиндра 14 оператор разводит (сводит) лапы 2 на нужное расстояние друг от друга. С помощью гидроцилиндров 11 и 12 оператор открывает первое 8 и второе 10 звенья лап. Включением гидроцилиндра 27 устройство ориентируется в пространстве таким образом, чтобы неподвижная лапа 3 располагалась вертикально. Далее качанием стрелы 35 производится внедрение лапы 3 между грузовыми единицами, например, мороженым неразделенным мясом. Для лучшего внедрения между тушами грузозахватное устройство с помощью гидромотора червячного редуктора модуля вращения 20 поворачивается то в одну, то в другую стороны, тем самым раздвигая туши. При этом оператор следит за тем, чтобы одно из грузовых мест попало между лапами устройства. После чего оператор включает гидроцилиндр 11 и 12 на закрытие звеньев лап и обжимает тушу мяса 17. После обжима туши одна из ее выпуклостей попадает в отверстие 16 неподвижной лапы 3. Таким образом груз оказывается захваченным поперек и готов к транспортированию. С помощью движений манипулятора (кочание и телескопирование стрелы и поворота платформы) груз переносится в зону укладки. Перед укладкой, вращая грузозахватное устройство относительно оси 21 и качая его относительно оси 24, оператор ориентирует его заданным образом. Т.о. происходит ориентация 13165 груза перед укладкой. Затем движениями ные лапы 2 замыкаются и прижимают груз к манипулятора груз опускается, лапы 2 раслапеЗ. Захватывание таким образом заверкрываются, устройство освобождается от шено, груз готов к транспортированию, когруза и готово к новому циклу. Для захвата торое описано выше. груза, например, мороженой полутуши го- 5 Использование предлагаемого технивядины с торца за лодыжку устройство устаческого решения обеспечивает надежный навливается так, чтобы лапа 3 находилась в обжим груза неправильной формы, позвогоризонтальном положении. Телескопироляет удерживать груз как за узкие, так и за ванием стрелы лапа 3 внедряется между широкие стороны, увеличивает удерживагрузовыми единицами с торца, так чтобы 10 ющую способность грузозахватного устодна из них легла на лапу 3. Далее сведенройства. 13165 c\J CM СО V 99LCL б 3\ S91EI 13165 г-г Фиг. 6 13165 13165 Положения манипулятора при шагании Упорядник Замовлення 4102 Техред М.Моргентал Коректор А. Обручар Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент*, м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюLoad gripping device
Автори англійськоюKryzhanovskyi Biacheslav Vasyliovych
Назва патенту російськоюГрузозахватное устройство
Автори російськоюКрыжановский Вячеслав Васильевич
МПК / Мітки
МПК: B66C 1/00
Мітки: вантажозахватний, пристрій
Код посилання
<a href="https://ua.patents.su/12-13165-vantazhozakhvatnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Вантажозахватний пристрій</a>
Вантажозахватний пристрій
Номер патенту: 8161
Опубліковано: 26.12.1995
Автори: Рудштейн Ілля Лазаревич, Шканов Олег Юхимович, Семковськая Наталя Парфеніївна, Кацовіч Григорій Мойсейович, Матвієнко Володимир Федорович, Берман Кирил Адольфович, Демішев Костянтин Іванович, Смоляр Іван Яковлевич, Хозло Віталій Христофорович, Челпанов Геннадій Павлович, Жигулін Володимир Іванович
МПК: B66C 1/42
Мітки: вантажозахватний, пристрій
Формула / Реферат:
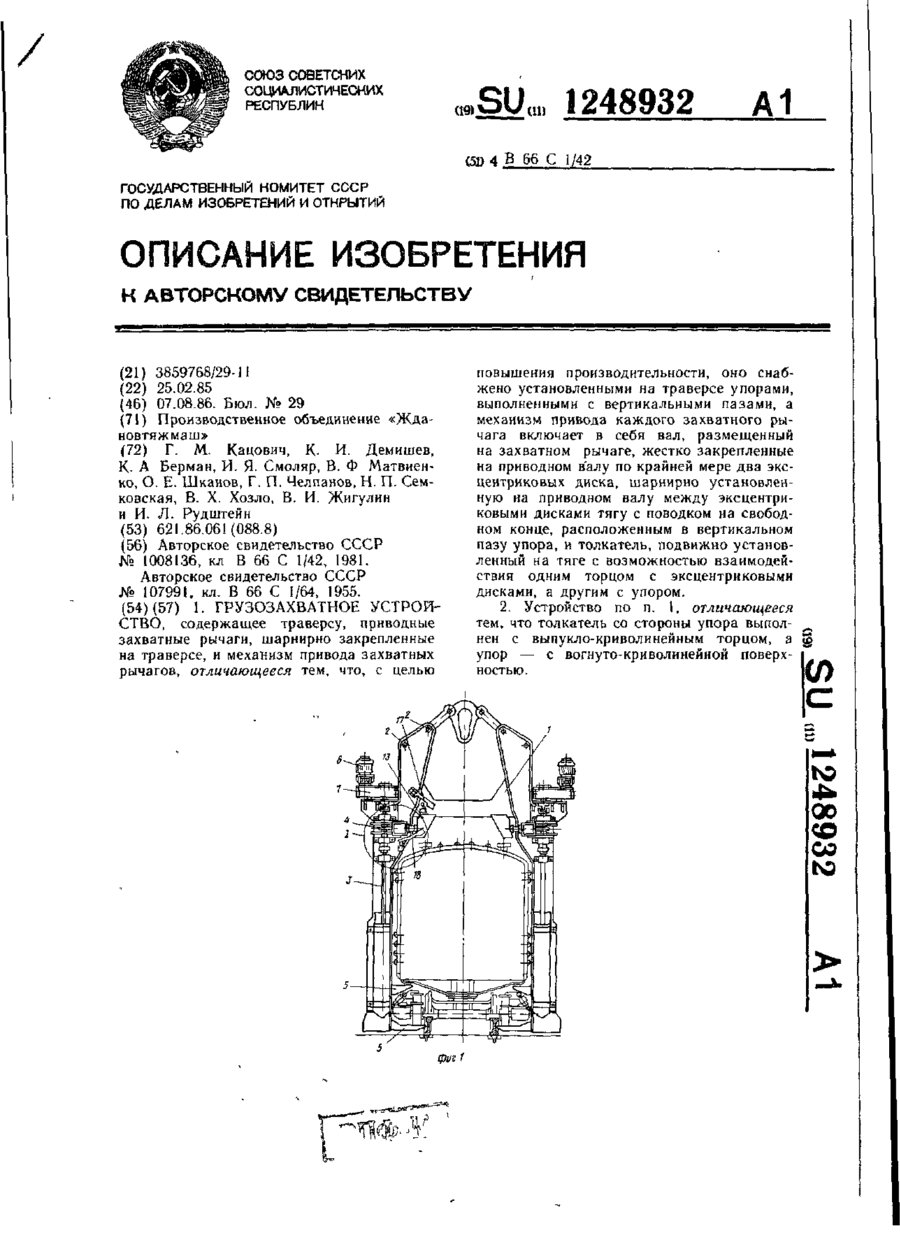
(57) 1. ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, содержащее траверсу, приводные захватные рычаги, шарнирно закрепленные на траверсе, и механизм привода захватных рычагов, отличающееся тем, что, с целью повышения производительности, оно снабжено установленными на траверсе упорами, выполненными с вертикальными пазами, а механизм привода каждого захватного рычага включает в себя вал, размещенный на захватном рычаге, жестко закрепленные на приводном валу по...
Вантажозахватний пристрій до навантажувача
Номер патенту: 12509
Опубліковано: 28.02.1997
Автор: Рахманов Микола Миколайович
МПК: B66F 9/06
Мітки: навантажувача, пристрій, вантажозахватний
Формула / Реферат:
Грузозахватное устройство к погрузчику, содержащее навешиваемую на каретку грузоподъемника стрелу, снабженную механизмом бокового смещения и захватным приспособлением с приводом, включающим вертикальную ось с шестерней, находящуюся с ней в зацеплении зубчатую рейку и гидроцилиндр перемещения рейки, отличающееся тем, что захватное приспособление выполнено в виде поворотно установленных под стрелой вертикальных валов, на нижних концах...
Пристрій для кріплення контейнера
Номер патенту: 4184
Опубліковано: 27.12.1994
Автори: Вернигора Анатолій Миколайович, Святний Іван Єремійович, Кохан Анатолій Омел'янович
МПК: B60P 7/06
Мітки: контейнера, пристрій, кріплення
Формула / Реферат:
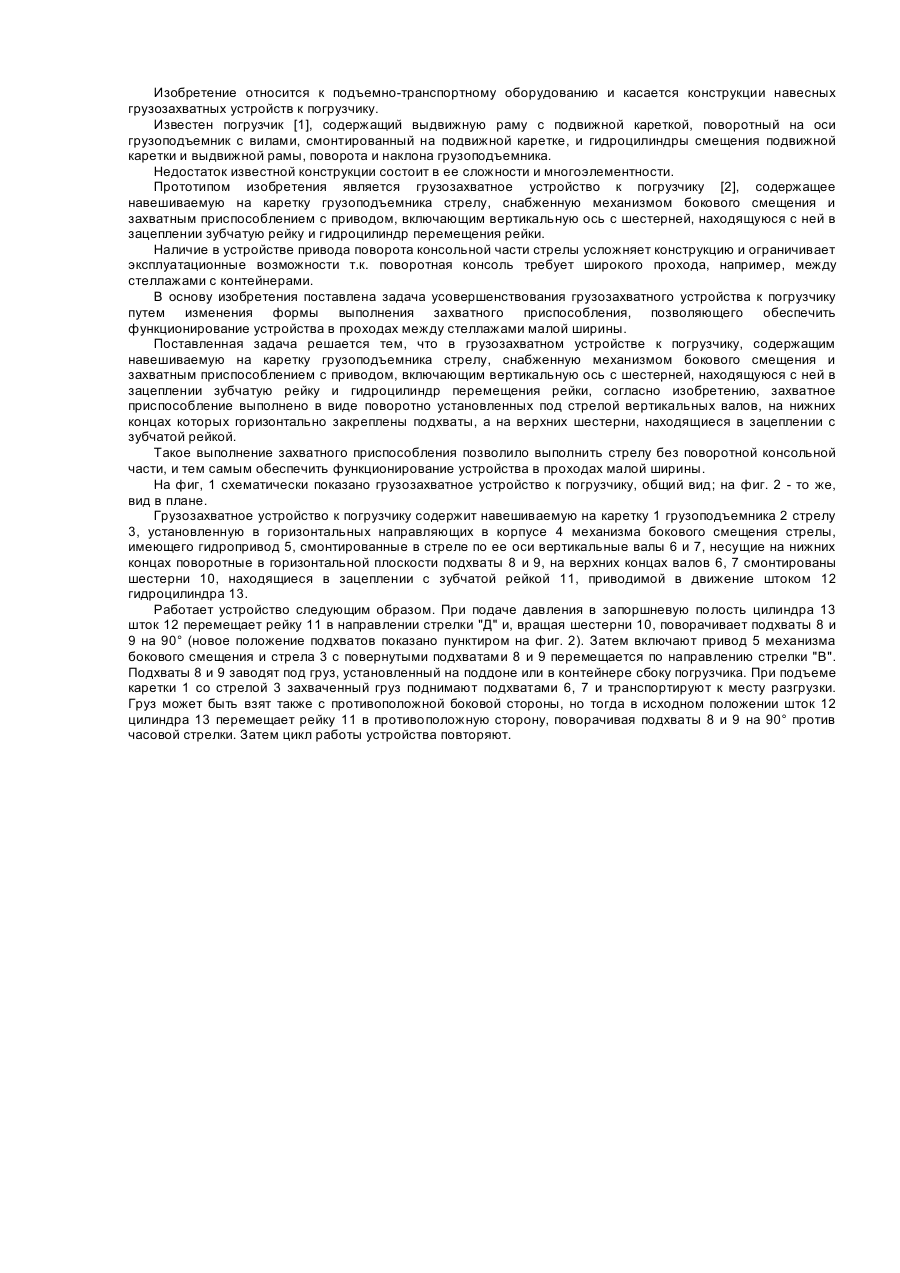
Устройство для крепления контейнера, имеющего опорные лапы, поддерживаемые платформой транспортного средства, содержащее опорную плиту, установленный в ней выступающий вверх корпус для ограничения горизонтального перемещения контейнера и размещенный в корпусе и предназначенный для взаимодействия с опорной лапой подпружиненный фиксатор со стопорами его положения, отличающееся тем, что, с целью упрощения конструкции и улучшения условий...
Пристрій для заземлення шин
Номер патенту: 2307
Опубліковано: 26.12.1994
Автори: Осипенко Сергій Іванович, Фьодоров Юрій Борисович
МПК: H02B 1/00
Мітки: пристрій, заземлення, шин
Формула / Реферат:
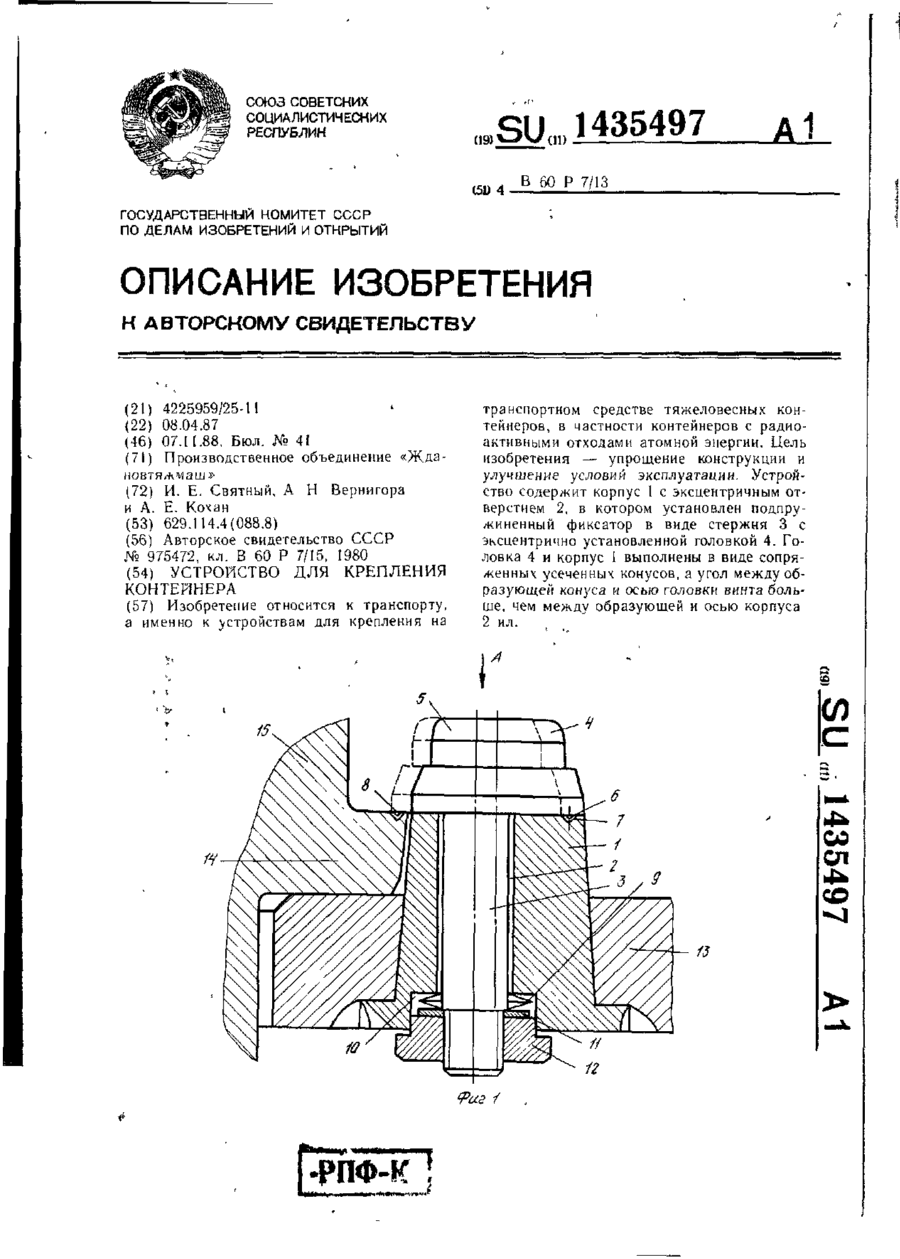
Устройство для заземлення шин шкафа комплектного распределительного устройства, содержащее ножи заземления, жестко закрепленные на валах, установленных в нижней части шкафа и шарнирно соединенных с приводом, отличающееся тем, что, с целью упрощения конструкции и снижения материалоемкости, вал выполнен единым для всех ножей заземления и расположен параллельно фасаду шкафа на двух опорах.
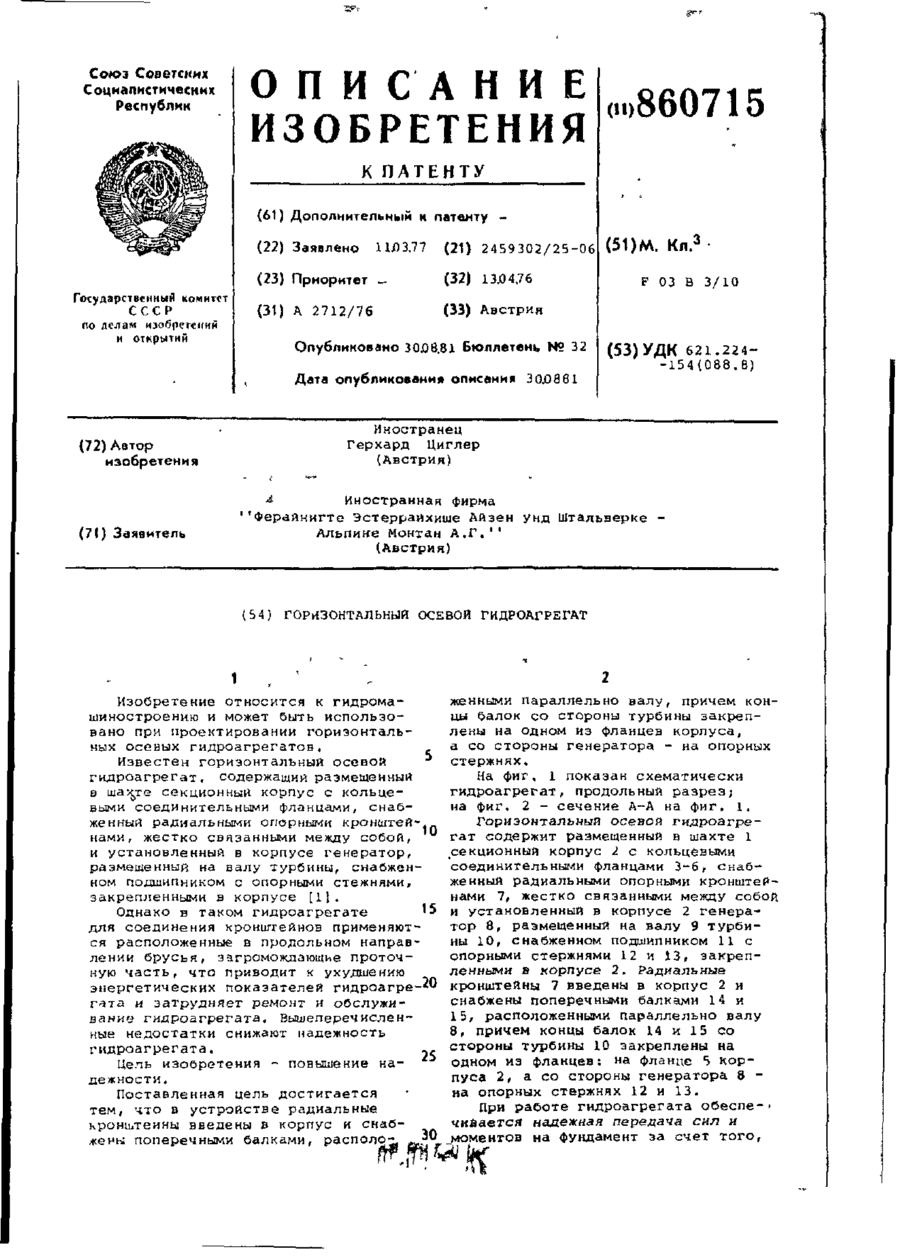
Горизонтальний осьовий гідроагрегат
Номер патенту: 5969
Опубліковано: 29.12.1994
Автор: Герхард Ціглер
МПК: F03B 3/10
Мітки: осьовий, гідроагрегат, горизонтальний
Формула / Реферат:
Горизонтальный осевой гидроагрегат, содержащий размещенный в шахте секционный корпус с кольцевыми соединительными фланцами, снабженный радиальными опорными кронштейнами, жестко связанными между собой, и установленный в корпусе генератор, размещенный на валу турбины, снабженном подшипником с опорными стержнями, закрепленными в корпусе, отличающийся тем, что, с целью повышения надежности, радиальные кронштейны введены в корпус и снабжены...
Попередній патент: Установка для гарячого пресування виробів з порошків шляхом пропускання електричного струму
Наступний патент: Лопать вітрового колеса з композиційних матеріалів та спосіб його виготовлення
Випадковий патент: Спосіб діагностики туберкульозної інфекції у дітей