Радіолокаційний вимірник кутових координат

Формула / Реферат
Радіолокаційний вимірник кутових координат, що містить передавач, антенну систему та чотири однакових приймача, що відрізняється тим, що антенна система виконана із першої приймальної рупорної конічної антени з круглим хвилеводом і трьох концентричних коаксиальних рупорних антен, зовнішня з яких є передаючою, а дві інших - приймальними, центри апертур всіх антен з’єднані в одній точці, у круглому хвилеводі рупорної конічної приймальної антени встановлені однакові горизонтальний і вертикальний штирі, зв’язані коаксиальними кабелями з першим і другим приймачами відповідно, коаксиальні рупорні приймальні антени зв’язані коаксиальними фідерними лініями зі другим і третім приймачами, а передаюча антена зв’язана такою ж лінією з передавачем, виходи всіх приймачів зв’язані з обчислювачем кутових координат цілі які визначають по співвідношенням
де θ - кут місця цілі,
β - азимутальний кут цілі,
δ - кутпохилу осі антени до напрямку на ціль, що визначається з наступного трансцендентного рівняння
UmГ, UmВ - амплітуди напруг сигналу на виходах першого і другого приймачів, зв’язаних з горизонтальним і вертикальним штирями в хвилеводі першої приймальної конічної рупорної антени відповідно,
θ0 - кут похилу осі антени до горизонтальної площини,
RH2, RK2 - внутрішній і зовнішній радіуси кільцевої апертури другої приймальної антени, зв’язаної з третім приймачем,
RH3, RК3 - внутрішній і зовнішній радіуси кільцевої апертури третьої приймальної антени, зв’язаної з четвертим приймачем,
λ - довжина хвилі,
Um2, Um3 - амплітуди напруг сигналу на виходах третього і четвертого приймачів, зв’язаних зі другою і третьою приймальними антенами відповідно.
Текст
Радіолокаційний вимірник кутових координат, що містить передавач, антенну систему та чотири однакових приймача, який відрізняється тим, що антенна система виконана із першої приймальної рупорної конічної антени з круглим хвилеводом і трьох концентричних коаксиальних рупорних антен, зовнішня з яких є передаючою, а дві інших приймальними, центри апертур всіх антен з'єднані в одній точці, у круглому хвилеводі рупорної конічної приймальної антени встановлені однакові горизонтальний і вертикальний штирі, зв'язані коаксиальними кабелями з першим і другим приймачами відповідно, коаксиальні рупорні приймальні антени зв'язані коаксиальними фідерними лініями Із другим і третім приймачами, а передаюча антена зв'язана такою ж лінією з передавачем, виходи всіх приймачів зв'язані з обчислювачем кутових координат ЦІЛІ які визначають по співвідношенням: = arc sin sin S cos 9n + cos 5 sin 6n Винахід відноситься до області радіолокації' і може бути використаний для виміру кутових координат цілі у радіолокаторах безперервного випромінювання. Відомий радіолокаційний вимірник кутових координат цілі по максимуму луна-сигналу, що приймається [1, с 41,рис. 1.24]. Антена вимірника має = ± arcsin и: де 8 - кут місця цілі, р - азимутальний кут цілі, б - кут похилу осі антени до напрямку на ціль, що визначається з наступного трансцендентного рівняння1 ) J , -R/n)sinScos
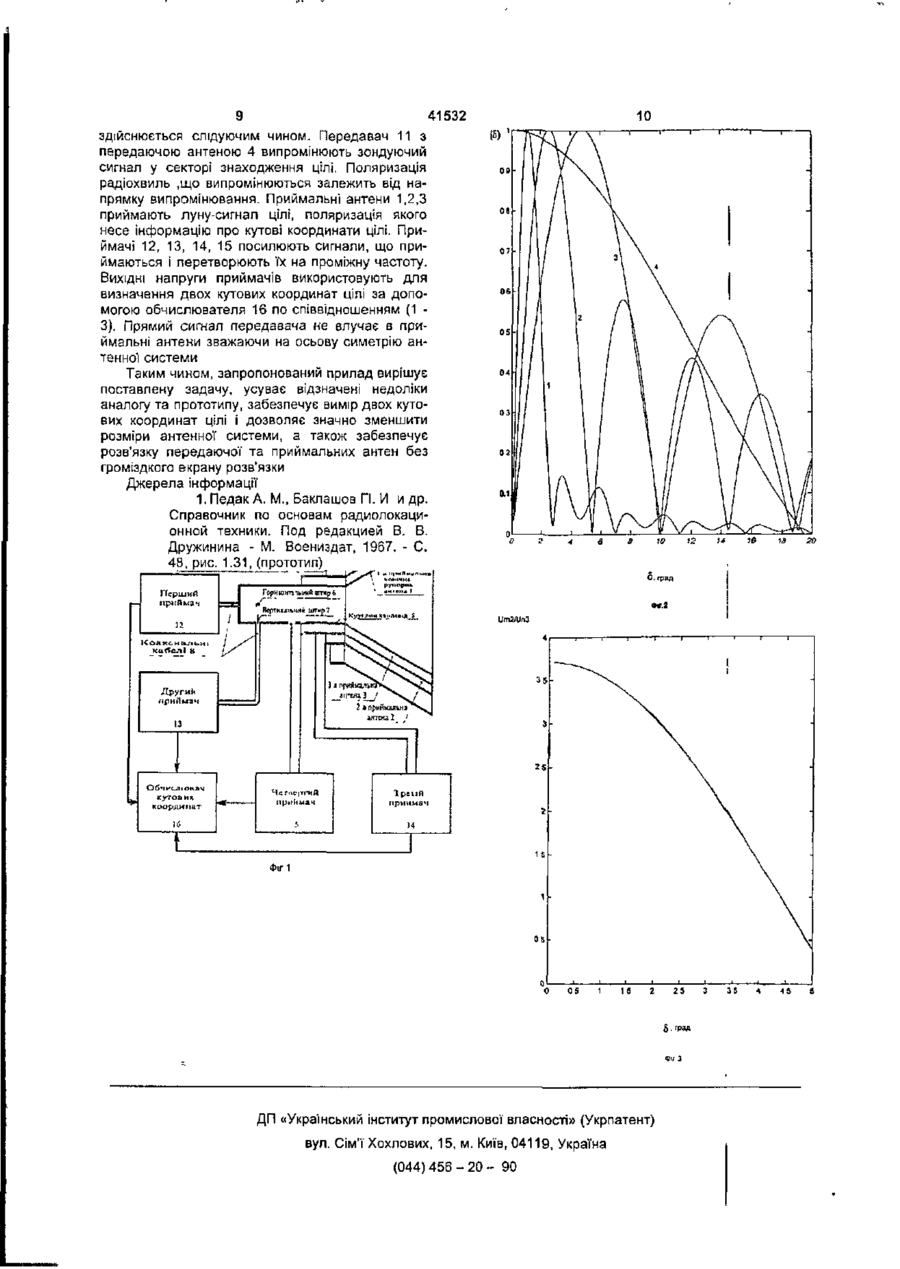
A Винахід відноситься до області радіолокації1 і може бути використаний для виміру кутових координат цілі у радіолокаторах безперервного випромінювання. Відомий радіолокаційний вимірник кутових координат цілі по максимуму луна-сигналу, що приймається [1, с 41,рис. 1.24]. Антена вимірника має и: •sin. /3 = ± arcsm UmB UmB де 8 - кут місця цілі, р - азимутальний кут цілі, * 5 - кут похилу осі антени до напрямку на ціль, що визначається з наступного трансцендентного рівняння л л -довжина хвилі; Um2, Um3 - амплітуди напруг сигналу на вихо я f/p дах третього і четвертого приймачів, звязаних зі другій і третьою приймальними антенами відповідно. Знак «+» в співвідношенні (2) беруть у випадку, коли амплітуда суми вихідних напруг третього і четвертого приймачів більше амплітуди різниці цих напруг, а знак «-» беруть у противному випадку Таку перевірку знаку виконує обчислювач по вихідним напругам цих приймачів на проміжній частоті У запропонованому приладі можна використовувати як імпульсний передавач, так і передавач безперервного випромінювання Принцип дії припаду заснований на використанні властивості коаксіальної рупорної антени з хвилею типу ТЕМ і кільцевою апертурою, який 41532 полягає в тому, що поляризація радіохвиль ,що випромінюються в такій антені залежить від напрямку випромінювання. Це дозволяє визначити кутові координати цілі по поляризації' радіохвиль, що приймаються конічною рупорною антеною. Запропонований прилад дозволяє вимірювати кутові координати цілі з допомогою системи непорушних антен, центри апертур яких суміщені в одній точці. Використання суміщених антен дозво1 ляє істотно зменшити розміри антенної системи. Крім того, прилад забезпечує розв'язку передаючих та приймальних антен без громіздкого екрану розв'язки у радіолокаторі безперервного випромінювання, що також зменшує розміри антенної системи Технічна суттєвість і принцип дії запропонованого приладу пояснюються фіг.1, 2, 3 На фіг.1 представлена спрощена структурна схема запропонованого радіолокаційного вимірника кутових координат і показаний спрощений ескіз його антенної системи. На фіг.2 представлені розрахункові нормовані діаграми спрямованості антен запропонованого радіолокатора F(5) На фіг З представлена розрахункова залежність відношення амплітуд сигналів на виходах третього і четвертого приймачів Um2/Um3 від куту 5 між віссю антенної системи і напрямком на ціль. До составу запропонованого приладу на схемі фіг.1 входять наступні основні елементи: перша приймальна конічна рупорна антена 1; друга приймальна антена 2 у вигляді коаксіальної рупорної антени з апертурою кільцевої" форми (такий рупор вживлюється коаксиальною фідерною лінією І в ньому збуджується хвиля типу ТЕМ); третя приймальна антена 3 у вигляді коаксіальної рупорної антени з апертурою кільцевої форми (розмір кільцевої' апертури цієї антени трохи більше, ніж у антени 2); передаюча антена 4 у вигляді зовнішньої коаксіально'і рупорної антени з апертурою кільцевої форми, круглий хвилевід 5 першої приймальної' антени; горизонтальний штир 6 у круглому хвилеводі першої антени; вертикальний штир 7 у круглому хвилеводі першої антени, коаксіальні кабелі 8, що зв'язують штирі 6, 7 з першим І другим приймачами; коаксіальні фідерні лінії 9, що зв'язують другу і третю приймальні антени з третім І четвертим приймачами відповідно; коаксіальна фідерна лінія 10, що зв'язує передаючу антену з передавачем; передавач 11 (може бути виконаний у вигляді / \ 1 cos5 2л J sin 2sin5 p = )sin5cosa> sin де 5 - кут між віссю антени І напрямком випромінювання, RH, RK - внутрішній і зовнішній радіуси кільцевої'апертури. Співвідношення (4) отримане з геометрії рупо передавача безперервного сигналу, або у вигляді імпульсного передавача); перший приймач 12, вхід якого зв'язаний з горизонтальним штирем 6; другий приймач 13, вхід якого зв'язаний з вертикальним штирем 7; третій приймач 14, вхід якого зв'язаний зі другою приймальною антеною; четвертий приймач 15, вхід якого зв'язаний з третьою приймальною антеною; обчислювач 16 для обчислення кутових координат цілей по амплітудам сигналів приймачів 12, 13, 14, 15 з допомогою співвідношень (1 - 3). Нижче пояснюється принцип дн запропонованого приладу і обґрунтовуються його істотні відокремлювальні признаки. Для випромінювання радіохвиль в запропонованому радіолокаторі використовується коаксіальна рупорна антена з апертурою кільцевої форми В такому рупорі збуджується хвиля типу ТЕМ Така антена не випромінює вздовж вісі антенної системи, але випромінює в інших напрямках У вертикальній площині антена випромінює радіохвилі вертикальної' поляризації, в горизонтальній площині - радіохвилі горизонтальної поляризації, а в інших площинах вектор поляризації поля ,що випромінюється збігається з кутом похилу площини Тобто поляризація радіохвиль, що випромінюються такою антеною, залежить від напрямку випромінювання. Пропонується використати цю властивість коаксіальної рупорної антени для визначення однієї з кутових координат цілі по поляризації' лунасигналу, що приймається. Луна-сигнал цілі приймають першою конічною рупорною приймальною антеною 1, а кут похилу площини поляризації' визначають по відношенню амплітуд сигналів, прийнятих горизонтальним І вертикальним штирями у круглому хвилеводі цієї" антени. Так можна визначити одну з кутових координат цілі. Для визначення другий кутовій координати цілі пропонується використати дві концентричні коаксіальні рупорні приймальні антени 2, 3 з різними розмірами кільцевих апертур. Діаграма спрямованості такий антени симетрична відносно ВІСІ антени і залежить від розмірів кільцевої апертури. Це дозволяє визначити кут між віссю антени і напрямком на ціль по відношенню амплітуд сигналів, прийнятих антенами 2, 3. Для доказу можливості практичної' реалізації запропонованого технічного рішення нижче приводяться необхідні математичні співвідношення Вектор попяризації' поля ,що випромінюється коаксиальною рупорною антеною лежить в площин випромінювання, а її діаграма спрямованості симетрична відносно вісі антени і визначається наступним співвідношенням dip, (4) рної коаксіальної антени з врахуванням того, що в такому рупорі збуджується хвиля типу ТЕМ Приклади розрахунку нормованих діаграм спрямованості передаючий, другій і третій коаксіальних завзятих антен F(5) представлені на фіг.2, де крива 1 побудована дня передаючий антени 4, 41532 крива 2 - для другої приймальної антени 2, крива З - для третьої приймальної антени 3. Там же для порівняння призведена діаграма спрямованості першої приймально'і рупорної конічної антени 1 (крива 4). Діаграми побудовані в залежності від куту 5 між віссю антени та напрямком випромінювання. Слідує відзначити, що діаграма спрямованості рупорної конічної антени 1 при прийомі лунасигналу цілі, що опромінюється коаксиальною рупорною антеною, також буде симетричною відносно вісі антени. З діаграм фіг.2 видно, що коаксіальні рупорні антени не випромінюють в напрямку вісі антени, але випромінюють в Інших напрямках і їхні діаграми спрямованості істотно залежать від розмірів кільцевої апертури. Сектор виміру кутової координати цілі визначається розмірами передаючої аніони 4 (в розрахунковому прикладі цей сектор складав 5=±3° від вісі антени). Поза цим сектором луна-сигналів цілей не буде. Діаграми спрямованості другій і третьої приймальних антен 2, 3 Істотно відрізняються, бо ці антени мають різні розміри. Відношення амплітуд сигналів другій і третьої приймальних антен містить інформацію про кутову координату цілі 5. Це можна бачити з графіка на фіг.З, де представлена розрахункова залежність відношення амплітуд сигналів Um2/Um3 на виході третього г четвертого приймачів 14, 15, зв'язаних зі другій 2 І третьою 3 приймальними антенами Ця залежність розрахована з допомогою співвідношення (3) і свідчить про той, що по відношенню амплітуд цих сигналів можна однозначно визначити кут 5 цілі у всьому робочому секторі антени, що передає. Розрахунки графіків на фіг.2, 3 проведені для антенної системи з наступними параметрами: довжина хвилі А = 0.05 м, внутрішній і зовнішній радіуси апертури передаючої коаксіальної антени RH = 0,35м, RK = 1м, внутрішній і зовнішній радіуси апертури другої" приймальної коаксіальної антени RH2 = 0,3м RK2= 0,35м; внутрішній і зовнішній радіуси апертури третьої приймальної' коаксіальної антени RH3 = 0,15м, RK3= 0,2М; радіус апертури конічного рупору першої приймальної антени R = 0,15м розрахунки підтверджують можливість однозначного визначення кутової координати 6 цілі по відношенню амплітуд напруг сигналів другій і третьої приймальних коаксіальних рупорних антен на виходах приймачів 14, 15 з допомогою трансцендентного рівняння (3), що отримане на основі співвідношення (4). В означеному робочому секторі передаючої антенн і це рівняння має єдине рішення. Іншу кутову координату цілі можна визначити по куту похилу у площини поляризації приймаємого луна-сигналу цілі. Цей кут у визначають за допомогою першої приймальної конічної рупорної антени 1 та двох ортогональних штирів 6, 7 у круглому хвилеводі цієї антени. Кут похилу площини поляризаційну визначається відношенням амплітуд напруг Umr, Ums сигналу на виходах першого і другого приймачів, зв'язаних з горизонтальним і вертикальним штирями у хвилеводі першої" приймальної конічної рупорної антени, по співвідно шенню у = ±arclg- ' т Г UтВ (5) Знак «+» в співвідношенні (5) беруть у випадку, коли напруги Ur, UB синфазні, а знак «-» - коли вони противофазні. Цей знак вибирають за допомогою обчислювателя шляхом порівняння амплітуд суми та різниці напруг Ur, UB Азимут р і кут місця 0 цілі визначають по співвідношенням (1), (2), що отримані із геометричних співвідношень зв'язку кутових координат р, 0 з координатами б,у. Виконання антенної системи з концентричних коаксіальних рупорних антен і суміщення центрів апертур цих антен вимагається також для забезпечення розв'язки передаючої1 та приймальних антен. Така розв'язка забезпечена осьовою симетрією антенної системи, що дозволяє виконати антенну систему без громіздкого екрану розв'язки. Суміщення центрів апертур всіх антен дозволяє істотно зменшити загальні розміри антенної системи. Штирі 6,7 у круглому хвилеводі першої приймальної' антени вимагаються для визначення куту похилу у площини поляризації радіохвиль ,що приймаються, а цей кут містить інформацію про кутові координати цілі. Таким чином, запропонований прилад може бути практично реалізований, а відзначені вище відокремлювальні признаки є істотними і принципово необхідні для реалізації приладу. Основні елементи запропонованого приладу па схемі фіг. 1 виконані слідуючим чином Антенна система виконана із першої приймальної рупорно'і конічної антени з круглим хвилеводом і трьох концентричних коаксіальних рупорних антен, зовнішня з яких є передаючою, а дві інших - приймальними Центри апертур всіх антен суміщені в одній точці. Розміри апертур антен вибирають з заданих вимог до ширини сектору виміру кутових координат. У цьому секторі обертати антенну систему по кутовим координатам не вимагається Коаксіальні рупорні антени 2, 3 зв'язані з приймачами 14, 15 коаксіальними фідерними ЛІНІЯМИ 9, конструкція яких ясна з ескізу антени на фіг 1 Така ж коаксіальна фідерна лінія 10 використовується для зв'язку передаючої антени 4 з передавачем 11. У круглому хвилеводі 5 першої' приймальної антени 1 встановлені однакові горизонтальний 6 і вертикальний 7 штирі, зв'язані коаксіальними кабелями з приймачами 12, 13 Передавач 11 може бути виконаний з безперервним або з імпульсним сигналом Приймачі 12, 13, 14, 15 однакові і можуть бути виконані у вигляді супергетеродинних приймачів з загальним гетеродином. Обмеження амплітуд сигналів у приймачах не допустимо. Приймачі та передавач не відрізняються від відповідних елементів прототипу. Обчислювач 16 являє собою мікроЗВМ для рішення трансцендентного рівняння (3) і обчислення кутових координат цілі по співвідношенням (1), (2) Для введення в обчислювач значень амплітуд вихідних напруг приймачів можна використати аналого-цифрові перетворювачі. Динаміка роботи запропонованого припаду 9 41532 здійснюється слідуючим чином. Передавач 11 з передаючою антеною 4 випромінюють зондуючий сигнал у секторі знаходження цілі. Поляризація радіохвиль ,що випромінюються залежить від напрямку випромінювання. Приймальні антени 1,2,3 приймають луну-сигнал цілі, поляризація якого несе інформацію про кутові координати цілі. Приймачі 12, 13, 14, 15 посилюють сигнали, що приймаються і перетворюють їх на проміжну частоту Вихідні напруги приймачів використовують для визначення двох кутових координат цілі за допомогою обчислювателя 16 по співвідношенням (1 3). Прямий сигнал передавача не влучає в приймальні антени зважаючи на осьову симетрію антенної системи Таким чином, запропонований прилад вирішує поставлену задачу, усуває відзначені недоліки аналогу та прототипу, забезпечує вимір двох кутових координат цілі і дозволяє значно зменшити розміри антенної' системи, а також забезпечує розв'язку передаючої та приймальних антен без громіздкого екрану розв'язки Джерела інформації І.Педак А. М., Баклашов П. И и др. Справочник по основам радиолокационной техники. Под редакцией В В. Дружинина - М Воениздат, 1967. - С. 48, рис. 1.31, (прототип). 10 1 ГО І г і \ Vл \І 10 12 Й.ГП 1
ДивитисяДодаткова інформація
Автори англійськоюPoroshyn Serhiy Mykhailovych
Автори російськоюПорошин Сергей Михайлович
МПК / Мітки
МПК: G01S 13/04
Мітки: радіолокаційний, координат, кутових, вимірник
Код посилання
<a href="https://ua.patents.su/12-41532-radiolokacijjnijj-vimirnik-kutovikh-koordinat.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний вимірник кутових координат</a>
Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/14
Мітки: радіолокаційний, кутових, координат, випромінюванням, вимірювач, фазовий, бе3упинним
Формула / Реферат:
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по...
Радіолокаційний вимірник радіальної швидкості цілі
Номер патенту: 41531
Опубліковано: 17.09.2001
Автор: Порошин Сергій Михайлович
МПК: G01S 11/00
Мітки: вимірник, радіальної, цілі, радіолокаційний, швидкості
Формула / Реферат:
Радіолокаційний вимірник радіальної швидкості цілі, що містить приймально-передаючу антену, передавач у вигляді генератора високої частоти f0 приймач з амплітудним детектором, підсилювач частот Допплера та індикатор, який відрізняється тим, що до складу передавача додатково включений генератор високої частоти f0+Df, що періодично перестроюється, девіація частоти якого Df має величину у межах від 0 до подвоєного значення максимально можливої...
Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: кутових, вимірювання, координат, спосіб, цілі
Формула / Реферат:
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух...
Радіолокаційний фазовий далекомір безупинного випромінювання
Номер патенту: 40135
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/02
Мітки: безупинного, радіолокаційний, фазовий, випромінювання, далекомір
Формула / Реферат:
Радіолокаційний фазовий далекомір безупинного випромінювання, що містить передавач із генератора високочастотного безупинного сигналу, генератора низькочастотної напруги, що модулює, і модулятора, приймач, фазовимірювач зсуву фаз вихідної напруги приймача щодо напруги генератора, що модулює, і антену у вигляді конічного рупора з круглим хвилеводом, що відрізняється тим, що до складу далекоміра додатково включений пристрій повороту...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: спосіб, вимірювання, секвентного, цілі, радіолокатора, наземного, координат, кутових
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Попередній патент: Радіолокаційний вимірник радіальної швидкості цілі
Наступний патент: Спосіб виробництва столового білого вина “весільне”
Випадковий патент: Гербіцидна композиція