Сільськогосподарська посівна система, рядковий пристрій для використання на посівній машині та спосіб зміни виходу насіння посівної машини
Номер патенту: 97640
Опубліковано: 12.03.2012
Автори: Пенфолд Гарн Фарлі, Райлендер Дейвід Джеймз, Пітерсон ДжР. Джеймс Р.
Формула / Реферат
1. Посівна машина, яка містить:
принаймні один брус для навішування робочих органів;
кілька рядкових пристроїв, прикріплених до бруса для навішування робочих органів, причому кожен з кількох рядкових пристроїв має:
дозувальний пристрій для насіння, що містить висівний диск, який забезпечує дозувальну дію щодо кількох насінин;
пристрій для внесення насіння, який одержує насіння із дозувального пристрою для насіння; і датчик насіння, встановлений для виявлення проходження насінин через дозувальний пристрій або пристрій для внесення насіння, причому датчик насіння видає сигнал, який вказує проходження насінин; і
схему обробки, яка приймає сигнал з кожного датчика насіння кожного із кількох рядкових пристроїв і залежно від цього визначає параметр внесення насіння, причому залежно від параметра внесення насіння схема обробки вносить зміни до дії дозування насіння.
2. Посівна машина за п. 1, яка відрізняється тим, що параметром внесення насіння є крок висіву.
3. Посівна машина за п. 2, яка відрізняється тим, що додатково має датчик швидкості пересування по землі, який видає сигнал швидкості до схеми обробки, яка залежно від сигналу швидкості визначає крок висіву.
4. Посівна машина за п. 2, яка відрізняється тим, що містить також датчик швидкості обертання висівного диска, пов'язаний із висівним диском, причому датчик швидкості обертання висівного диска видає сигнал швидкості до схеми обробки, яка залежно від сигналу швидкості визначає крок висіву.
5. Посівна машина за п. 2, яка відрізняється тим, що дозувальний пристрій для насіння містить принаймні один видаляч подвоєнь, пристрій для зміни потоку повітря і привід з регульованою швидкістю для висівного диска, з можливістю регулювання підключений до схеми обробки.
6. Посівна машина за п. 5, яка відрізняється тим, що дозувальний пристрій для насіння містить видаляч подвоєнь, з можливістю регулювання підключений до схеми обробки.
7. Посівна машина за п. 6, яка відрізняється тим, що дозувальний пристрій містить також виконавчий механізм, підключений до видаляча подвоєнь, причому дія дозування включає змінювання утримування насіння на диску, причому видаляч подвоєнь змінює утримування при принаймні частковій зміні його положення виконавчим механізмом.
8. Посівна машина за п. 7, яка відрізняється тим, що схема обробки є частиною системи контролю сіяння, розміщеної у задній частині посівної машини, причому система контролю сіяння має зону дисплея, направлену у бік задньої частини посівної машини.
9. Посівна машина за п. 7, яка відрізняється тим, що схема обробки передбачає регулювання з можливістю вибору для зміни принаймні одного з наступного: крок висіву або щільність посіву.
10. Посівна машина за п. 7, яка відрізняється тим, що схема обробки є частиною системи контролю сіяння, причому система контролю сіяння визначає і відображає принаймні одне з наступного: відсотки пропусків, відсотки подвоєнь, щільність посіву, поточний крок висіву і середній крок висіву.
11. Посівна машина за п. 1, яка відрізняється тим, що параметром внесення насіння є задане вікно часу, упродовж якого, як очікується, насіння пройде через датчик насіння.
12. Рядковий пристрій для використання на посівній машині, яка має систему контролю сіяння, який містить:
дозувальний пристрій для насіння, що містить висівний диск, який забезпечує дозувальну дію щодо кількох насінин;
пристрій для внесення насіння, який одержує насіння із дозувального пристрою для насіння;
датчик насіння, встановлений для виявлення проходження насінин через дозувальний пристрій або пристрій для внесення насіння, причому датчик насіння видає сигнал, який вказує проходження насінин; і
схему обробки, яка приймає сигнал із датчика насіння, причому схема обробки залежно від сигналу визначає параметр внесення насіння, причому залежно від параметра внесення насіння схема обробки вносить зміни до дії дозування насіння.
13. Рядковий пристрій за п. 12, який відрізняється тим, що дозувальний пристрій для насіння містить принаймні один видаляч подвоєнь, пристрій для зміни потоку повітря і регульований привід диска з можливістю регулювання підключений до схеми обробки.
14. Рядковий пристрій за п. 13, який відрізняється тим, що дозувальний пристрій для насіння містить видаляч подвоєнь, з можливістю регулювання підключений до схеми обробки.
15. Рядковий пристрій за п. 14, який відрізняється тим, що дозувальний пристрій додатково має виконавчий механізм, підключений до видаляча подвоєнь, причому дія дозування включає змінювання утримування насіння на диску, причому видаляч подвоєнь змінює утримування при принаймні частковій зміні його положення виконавчим механізмом.
16. Спосіб зміни виходу насіння посівної машини, який включає наступні стадії:
стадію, на якій виявляють параметр внесення насіння, яке пропускають через дозувальний пристрій для насіння або пристрій для внесення насіння, і
стадію, на якій параметр внесення насіння змінюють залежно від цільових критеріїв кроку висіву.
17. Спосіб за п. 16, який відрізняється тим, що стадія змінювання включає стадію, на якій здійснюють принаймні одне з наступного: змінюють швидкість обертання диска у дозувальному пристрої для насіння, змінюють положення видаляча подвоєнь відносно диска або змінюють потік повітря до диска.
18. Спосіб за п. 17, який відрізняється тим, що на стадії змінювання змінюють положення видаляча подвоєнь відносно диска.
19. Спосіб за п. 17, який відрізняється тим, що стадія змінювання включає стадію, на якій змінюють утримування насіння на диску у дозувальному пристрої для насіння залежно від параметра внесення насіння, причому як параметр внесення насіння використовують крок висіву.
20. Спосіб за п. 16, який відрізняється тим, що додатково включає стадію, на якій визначають принаймні одне з наступного: відсотки пропусків, відсотки подвоєнь, поточний крок висіву і середній крок висіву.
21. Спосіб за п. 20, який відрізняється тим, що додатково включає стадію, на якій цільові критерії кроку висіву порівнюють принаймні з одним з наступного: відсотки пропусків, відсотки подвоєнь, поточний крок висіву і середній крок висіву.
22. Спосіб за п. 21, який відрізняється тим, що стадію порівнювання і стадію змінювання здійснюють окремо для кожного рядкового пристрою посівної машини.
23. Спосіб за п. 16, який відрізняється тим, що як цільові критерії кроку висіву використовують заданий період часу, упродовж якого, як очікують, видадуть сигнал з датчика насіння, причому як параметр внесення насіння використовують час проходження насіння через датчик насіння з видачею сигналу, причому цільові критерії кроку висіву для насіння задовольняють при знаходженні часу у межах заданого періоду часу.
Текст
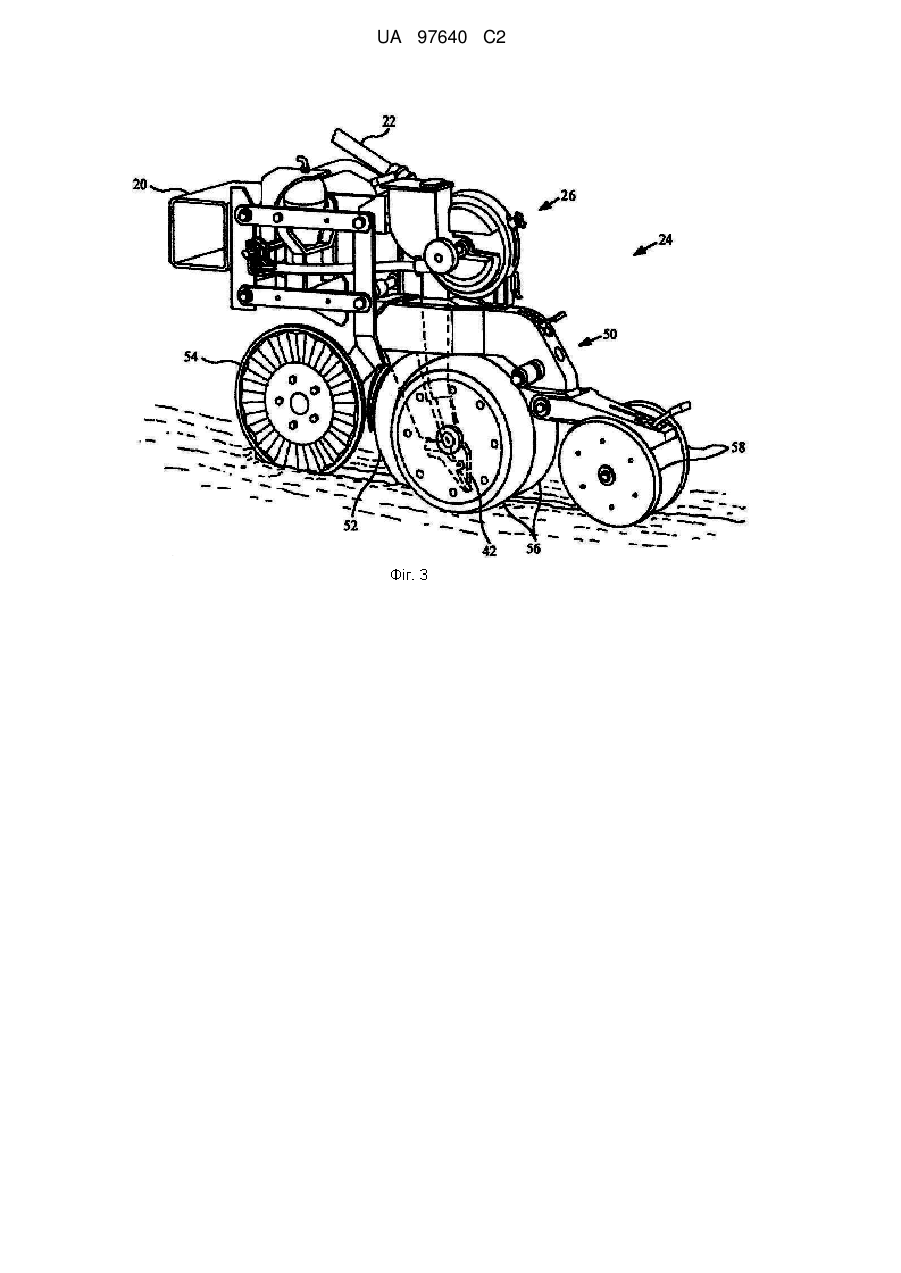
Реферат: Посівна машина, яка має принаймні один брус для навішування робочих органів, кілька рядкових пристроїв і схему обробки. Кожен з кількох рядкових пристроїв прикріплений до бруса для навішування робочих органів. Кожен з рядкових пристроїв має дозувальний пристрій для насіння, пристрій для внесення насіння і датчик насіння. Дозувальний пристрій для насіння містить висівний диск, який забезпечує дозувальну дію щодо кількох насінин. Пристрій для внесення насіння одержує насіння з дозувального пристрою для насіння. Датчик насіння встановлений для виявлення проходження насінин через дозувальний пристрій або пристрій для внесення насіння і видає сигнал, який вказує проходження насінин. Сигнал з кожного з датчиків насіння кожного з кількох рядкових пристроїв одержує схема обробки. Залежно від сигналу, схема обробки визначає параметр внесення насіння, і залежно від параметра внесення насіння, схема обробки вносить зміни до дії дозування насіння. UA 97640 C2 (12) UA 97640 C2 UA 97640 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до сільськогосподарських посівних машин і, зокрема, до контролю внесення насіння посівною машиною у борозну. Сільськогосподарська посівна машина, така, як сіялка для просапних культур або зернова сіялка, вносить насіння на необхідній глибині кількома паралельними борознами для внесення насіння, виконаними у ґрунті. У випадку сіялки для просапних культур кілька пристроїв для сіяння просапних культур типово приводяться до руху по землі з використанням коліс, валів, зірочок, роздавальних коробок передач, ланцюгів тощо. Кожний пристрій для сіяння просапних культур має раму, з можливістю переміщення з'єднану з брусом для навішування робочих органів. Рама може нести основну банку висівного апарата, бункер для гербіцидів і бункер для пестицидів. Якщо використовуються гранульовані гербіциди й пестициди, пов'язані з ними механізми дозування, призначені для розподілу гранульованого продукту у борозни для внесення насіння, відносно прості. З іншого боку, механізми, необхідні для правильного дозування насіння із заданою швидкістю і внесення насіння у заданих відносних місцях і на заданій глибині у борозні для внесення насіння, є відносно складними. Механізми, пов'язані з дозуванням і внесенням насіння можна у цілому поділити на систему дозування насіння й систему внесення насіння, які сполучаються між собою. Система дозування насіння одержує насіння насипом із банки висівного апарата, яка переноситься рамою. Можуть використовуватися різні види систем дозування насіння, такі, як висівні пластини, пальцеві висівні пластини й висівний диск. У випадку системи дозування у вигляді висівного диска, висівний диск виконаний з кількома висівними комірками, розміщеними по його периферії. Насіння переміщається у ці висівні комірки по одній насінині або кілька у кожній висівній комірці залежно від розміру й конфігурації висівної комірки. Для того, щоб сприяти переміщенню й утримуванню насіння у висівних комірках, разом із висівним диском може використовуватися потік повітря, створюваний розрідженням або тиском. Насіння розбивається поодинці й подається із заданою швидкістю до системи внесення насіння. Систему внесення насіння можна розбити на такі категорії: система самопливного висівного апарата й система механічного висівного апарата. У випадку системи самопливного висівного апарата сім'япровід має впускний кінець, розташований під системою дозування насіння. Розбите поодинці насіння із системи дозування насіння просто випадає з випускного кінця сім'япроводу і падає під дією сили тяжіння у борозну для внесення насіння. Сім'япровід може бути скривленим назад, щоб сприяти направленню насіння у борозну для внесення насіння. Система внесення насіння у виконанні механічного висівного апарата зазвичай може класифікуватися як висівний апарат із стрічковим транспортером, висівний апарат із поворотною заслінкою, ланцюговий висівний апарат або пневматичний висівний апарат. Ці типи систем внесення насіння забезпечують у певній мірі рівномірне внесення насіння уздовж заданого шляху на необхідній відстані одне від одного. Деякі типи насіння, таке, як плоске насіння кукурудзи з нанесеними на нього інсектицидами або іншими засобами обробки, розбити поодинці для дозаторів з розрідженням важно. Погане розбиття поодинці різних типів насіння характеризується подвоєннями, пропусками і накопиченнями насінин, що переносяться диском. Подвоєння і пропуски - це кілька насінин і відсутність насіння відповідно у кожній висівній комірці. Накопичення - це кілька насінин, що переносяться прискорювачами накопичень насіння, які виступають з поверхні висівного диска. Ці типи насіння зазвичай найкраще висіваються плоским висівним диском у сполученні з видалячем подвоєнь. У цій галузі існує потреба у сільськогосподарській посівній машині з контролем примусового внесення насіння на точній відстані одне від одного й ефективним регулюванням системи дозування насіння. Пропонується посівна машина, яка має принаймні один брус для навішування робочих органів, кілька рядкових пристроїв і схему обробки. Кожен з кількох рядкових пристроїв прикріплений до бруса для навішування робочих органів. Кожен з кількох рядкових пристроїв має дозувальний пристрій для насіння, пристрій для внесення насіння і принаймні один датчик насіння. Дозувальний пристрій для насіння містить висівний диск, який забезпечує дозувальну дію щодо кількох насінин. Пристрій для внесення насіння одержує насіння з дозувального пристрою для насіння. Датчик насіння встановлений для виявлення проходження насінин через дозувальний пристрій або пристрій для внесення насіння і видає сигнал, який вказує проходження насінин. Сигнал з кожного з датчиків насіння кожного з кількох рядкових пристроїв одержує схема обробки. Залежно від сигналу, схема обробки визначає параметр внесення насіння, і залежно від параметра внесення насіння, схема обробки вносить зміни до дії дозування насіння. 1 UA 97640 C2 5 10 15 20 25 30 35 40 45 50 55 60 Відповідно до іншого аспекту винаходу, пропонується спосіб зміни виходу насіння посівної машини, який включає стадію, на якій виявляють параметр внесення насіння, яке пропускають через дозувальний пристрій для насіння або пристрій для внесення насіння, і стадію, на якій параметр внесення насіння змінюють залежно від цільових критеріїв кроку висіву. Фіг. 1 являє собою вигляд у перспективному зображенні сільськогосподарської посівної машини, яка містить варіант здійснення пропонованого пристрою контролю і керування. Фіг. 2 являє собою вигляд з кінця сільськогосподарської посівної машини, яка має пристрій контролю і керування, показаний на фіг. 1. Фіг. 3 являє собою вигляд у перспективному зображенні рядкового пристрою, який має систему дозування і внесення, що може використовуватися у варіанті здійснення посівної машини, показаної на фіг. 1 і 2. Фіг. 4 являє собою вигляд у перспективному зображенні системи дозування, використовуваної рядковим пристроєм на фіг. 3. Фіг. 5 являє собою частково покомпонентний вигляд у перспективному зображенні системи дозування, показаної на фіг. 4. Фіг. 6 являє собою частковий розріз системи дозування на фіг. 4 і 5. На кресленнях і, зокрема, на фіг. 1, представлена сільськогосподарська система 10, яка включає трактор 12 і посівну машину 14. Посівна машина 14 є у вигляді сіялки для просапних культур 14, але могла б бути і зерновою сіялкою. Трактор 12 забезпечує рушійну силу для сіялки 14 і механізмів на ній. Передбачена система 16 контролю/керування кроку висіву, яка використовується водієм трактора 12 для контролю кроку висіву насіння із сіялки 14. Регулювальна система 18 дозволяє системі 16 контролю/керування змінювати утримування насіння у системі дозування у сіялці 14. На фіг. 2-6 представлені деталі сіялки 14, яка містить брус для навішування робочих органів 20, пристрій подачі насіння 22, рядкові пристрої 24, кожен з яких має дозувальний пристрій 26, який має висівний диск 28 з отворами 30 у ньому і видаляч подвоєнь 32. Видаляч подвоєнь 32 є відомим ще й як пристрій для поштучної подачі насінин 32, який розміщується з можливістю регулювання таким чином, щоб запобігти одночасної подачі двох насінин через кожен отвір 30 у висівному диску 28. Дозувальні пристрої 26 безпосередньо або опосередковано з'єднані з брусом для навішування робочих органів 20, який у свою чергу зчеплений з трактором 12. Насіння подається до дозувальних пристроїв 26 із пристрою подачі насіння 22 і накопичується поверх частини висівного диска 28. Висівний диск 28 з'єднаний по текучому середовищу з генератором потоку повітря, який подає потік повітря у порожнину 46 та/або порожнину 48. Генератор потоку повітря може мати регульований потік повітря, який перебуває під керуванням регулювальної системи 18. Генератор потоку повітря може створювати тиск, вищий або нижчий за атмосферний, залежно від конструктивного виконання сіялки 14; для легкості пояснення потік повітря розумітиметься як вакуумна система. Потік повітря, створений вакуумною системою, подається у порожнини 46 та/або 48 і, тим самим, до одного боку висівного диска 28, викликаючи протікання повітря через отвори 30. Повітря, що протікає через отвори 30, при обертанні висівного диска 28 через накопичене насіння у дозувальному пристрої 26, притягає насіння до цих отворів. Насінини з'єднуються з отворами 30 і обертаються з накопиченого насіння до точки випуску, як показано штриховою лінією на фіг. 6, з дозувального пристрою 26 таким чином, що можуть переміщатися системою 50 внесення насіння у підготовану у ґрунті борозну. Рядковий пристрій 24 додатково несе дводисковий сошник 52, призначений для утворення у ґрунті борозни для внесення насіння. Спереду дводискового сошника 52 може розміщуватися факультативний передплужник 54, особливо для використання при посіві по стерні. З парою дисків дводискового сошника 52 відповідно пов'язана пара копіювальних коліс 56. Зокрема, кожне копіювальне колесо 56 розміщене у цілому у лінію з кожним відповідним диском дводискового сошника 52 і безпосередньо поруч з його зовнішнім боком. Кожне копіювальне колесо 56 може регулюватися у вертикальному напрямку для регулювання глибини борозни, яка нарізується у ґрунті з використанням дводискового сошника 52. Частиною рядкового пристрою 24 є також пара загортачів 58. Загортачі 58 розміщені у цілому у лінію з дводисковим сошником 52. Загортачі 58 переважно зміщені у напрямку вниз і мають периферійний край з формою, яка залежно від випадку застосування може різнитися. Система 50 внесення насіння показана у вигляді самопливного сім'япроводу 42, але могла б конструктивно виконуватися й інакше, наприклад, як система механічного висівного апарата з привідним колесом тощо. Система дозування насіння 26 одержує насіння із пристрою подачі насіння, наприклад, насіння з віддаленого основного насінного ящика, яке подається пневматично або схожим 2 UA 97640 C2 5 10 15 20 25 30 35 40 45 50 55 60 способом, або з банки висівного апарата, встановленої на брусі 20 для навішування робочих органів або рамі рядкового пристрою 24. У корпусі системи дозування 26 є зона накопичення насіння. Висівний диск 28 має кілька отворів 30, які мають висівні комірки на боці насіння диска 28, поперемінно розташованих по його периферії. Розріджене повітря сприяє входу насіння до висівних комірок і підтримує насіння у висівних комірках. З висівних комірок насіння транспортується до системи 50 внесення насіння. Природно, для сприяння переміщенню насіння дозатор насіння 26 може конструктивно виконуватися з позитивним, а не з вакуумметричним тиском. Видаляч подвоєнь 32 регулюється вручну, як показано на фіг. 4, на якому можна бачити ручний регулятор 44. Ручний регулятор 44 регулюється для переміщення видаляча подвоєнь 32 відносно висівного диска 28 таким чином, щоб кількість насіння, що пропускається ним, можна було зменшити таким чином, щоб кожен отвір 30 переносив лише одну насінину. Регулювання видаляча подвоєнь 32 необхідне для того, щоб висів відбувався з належною швидкістю й оптимальним внесенням насіння. Водій часто ігнорує ручне регулювання, оскільки це відбирає багато часу, і доводиться залишати кабіну трактора і вручну регулювати кілька ручних регуляторів 44. Для досягнення максимальних врожаїв просапні культурі потребують точних рівнів щільності посіву або норм висіву. Деякі культури, такі, як кукурудза і бавовна, дають найбільші врожаї при рівномірному точному кроці висіву або відстанях між рослинами у даному рядку. Відповідно до цього винаходу, крок висіву оцінюється для забезпечення постійного керування кроком висіву рослин для оптимізації врожаю на лану, який має таку саму щільність посіву, але не має точної відстані між рослинами. Коли насіння виходить з дозувального пристрою 26, протікає через сім'япровід 42 і виявляється датчиком насіння 34, як показано на фіг. 6, датчик насіння 34 видає сигнал, який посилається до електронної схеми обробки, яка може знаходитися у системі контролю 16. Дисплей 36 у системі контролю 16 видає інформацію водію у вигляді відсотка пропусків, відсотка подвійного висіву, фактичного або середнього кроку висіву. Схема обробки одержує сигнал датчика насіння 34 для передачі параметра внесення насіння, який у представленому варіанті здійснення є у вигляді часу між проходженням кожної насінини. Схема обробки одержує додатково сигнал швидкості, пов'язаний зі швидкістю трактора 12 та/або сіялки 14 по землі з датчика швидкості 58. Датчик швидкості 58 може знаходитися на тракторі 12 або сіялці 14, і цей сигнал вказує швидкість сіялки 14 по землі. Сигнал швидкості може передаватися до схеми обробки передачею сигналу з трактора 12, або ця швидкість може визначатися шляхом розміщення датчика швидкості 58 на сіялці 14 з ув'язкою датчика швидкості 58 з колесом, що контактує з землею, системою глобального позиціювання, акустичною системою, направленою на землю або радіолокаційною системою, направленою на землю. У іншому варіанті здійснення цього винаходу сигналом швидкості, використовуваним системою обробки, є швидкість обертання висівного диска 28. Із висівним диском 28 пов'язаний датчик швидкості обертання 60, який видає сигнал, що вказує швидкість обертання висівного диска 28. Сигнал датчика швидкості обертання 60, що вказує швидкість обертання висівного диска 28, використовується схемою обробки разом із сигналом з датчика насіння 34 для видачі параметра внесення насіння, який використовується схемою обробки як оцінка роботи висівного диска 28, і якщо параметр внесення насіння виходить за цільові межі, регулювальна система 18 використовується для зміни роботи дозувального пристрою 26, щоб привести параметр внесення насіння у цільові межі. Параметром внесення насіння може серед інших вважатися відстань між насінинами. Крім того, схема обробки як критерій для кроку насінин може використовувати заданий час, і при цьому використовується певне задане вікно часу, і очікується, що упродовж цього заданого часу одна або кілька насінин пройде або пройдуть через датчик насіння 34. Якщо упродовж цього вікна часу через датчик насіння 34 проходить задана кількість насінин, то крок вважається правильним, як це може відбуватися з подвоєннями або пропусками. І напроти, якщо упродовж цього вікна проходить кількість насінин, менша або більша за задану, то крок вважається неправильним. Альтернативно, як визначення внесення насіння, задане переміщення висівного диска 28 може порівнюватися з кількістю внесених насінин. Наприклад, один оберт висівного диска 28 може включати внесення конкретної кількості насінин, скажімо, 24 насінини. Відхилення від цієї кількості насінин на оберт вказує на необхідність регулювання. Якщо задане переміщення еквівалентне одній висівній комірці, то виявлення кожної насінини ув'язується на основі один до одного з переміщенням висівного диска 28. Регулювальна система 18 містить виконавчий механізм 38, пов'язаний з кожним дозувальним пристроєм 26, і органи керування 40, пов'язані з дисплеєм 36, таким чином, що 3 UA 97640 C2 5 10 15 20 25 30 35 40 45 50 55 видаляч подвоєнь 32 та/або потік повітря з генератора 22 потоку повітря можна регулювати для зміни роботи висівного диска 28 і внесення насіння у борозну. Датчик насіння 34 може виконуватися у вигляді оптичного датчика з джерелом світла, розміщеним на одному боці сім'япроводу 42, й оптичним датчиком на протилежному боці сім'япроводу 42. Датчик насіння 34 видає вхідний сигнал для визначення часу між проходженнями насінин через датчик 34. Якщо час між проходженнями насінин дуже малий з огляду на цільові щільність посіву, ширину міжрядь і швидкість, це вказує на те, що дозувальним пристроєм 26 подаються більш, ніж одна насінина за цей період часу. Якщо час між проходженнями насінин занадто великий, це вказує на пропуски. Ця інформація може відображатися на дисплеї 36, і органи керування 40 дозволяють водію регулювати видаляч подвоєнь 32 шляхом включення виконавчого механізму 38, щоб більш або менш агресивно видаляти подвоєння. Крім того, можна регулювати потік повітря, що подається до висівного диска 28, шляхом зміни швидкості вентилятора, який створює розрідження, або регулювання потоку повітря, що подається у порожнини 46 та/або 48 кожного дозувального пристрою 26. Крім того, для зміни кроку висіву регулювальна система 18 може передбачати регулювання швидкості електричного, гідравлічного або іншого приводу, який може бути підключеним до висівного диска 28. Якщо видаляч подвоєнь 32 розміщений таким чином, що занадто агресивно видаляє подвоєння, він може вибивати насіння з диска, спричиняючи пропуски у послідовності висіву. Дисплей 36, а також орган керування 40 можуть утворювати об'єднаний блок, який може розміщатися на задньому боці сіялки 14 з таким розрахунком, щоб водій міг контролювати кожен дозувальний пристрій 26, фактично спостерігаючи за насінням, яке подається ним. Додатково, дисплей 36 і органи керування 40 можуть розміщуватися у такому робочому положенні, наприклад, у кабіні трактора 12, таким чином, щоб роботу дозувальних пристроїв 26 можна було регулювати під час роботи сіялки 14. Відстань між насінинами - це інформація, недоступна з відомих технічних рішень, і використовується для активації механізму зворотного зв'язку виконавчого механізму 38 або рівня розрідження, забезпечуваного вакуумною системою, для оптимізації кроку висіву, що подаються висівним диском 28. Це використовується з великою перевагою, якщо кукурудза сіється з різними сортами насіння у рядкових пристроях 24. Наприклад, якщо необхідно посіяти кукурудзу різних сортів, і при цьому певні рядкові пристрої 24 можуть мати насіння одного конкретного сорту кукурудзи, а інші рядкові пристрої 24 матимуть насіння іншого сорту кукурудзи, для індивідуального регулювання утримування насіння висівним диском 28 при пересуванні сіялки 14 по лану використовується індивідуальне виявлення кроку посіву кожним рядковим пристроєм 24. Хоча упродовж певного часу регулювання видаляча подвоєнь є можливим вручну, зворотний зв'язок з датчика насіння і можливість для водія вибирати режим автоматичного регулювання або вибраний режим регулювання видаляча подвоєнь, обертова швидкість висівного диска та/або потік повітря є особливо корисним аспектом цього винаходу. Коли датчик 34 виявляє насінину, видається сигнал, який посилається до системи контролю 16. Система контролю 16 виявляє крок висіву, коли насінини виходять із дозувального пристрою 26, або коли вони проходять через систему 50 внесення. Система контролю 16 передає інформацію до системи керування і регулювальної системи 18, причому всі функції обробки виконуються схемою обробки, яка може розміщатися у системі 16 контролю. Утримування насінин на висівному диску 28 змінюється залежно від кроку висіву. В систему контролю/керування 16 і видаляч подвоєнь 32 можуть вводитися критерії припустимого відсотка пропусків і подвоєнь, та/або потік повітря до конкретного дозувального пристрою 26 регулюється регулювальною системою 18, виходячи з відхилень від цих критеріїв. Якщо кількість пропусків занадто велика, потік повітря може підсилюватися, та/або видаляч подвоєнь 32 регулюватиметься у бік меншої агресивності. Якщо занадто високий відсоток подвоєнь, то потік повітря до дозувального пристрою 26 зменшується та/або видаляч подвоєнь 32 регулюється у бік більшої агресивності. Схема обробки у системі контролю 16 виконує функції прийому сигналу з датчика насіння 34. Сигналу, який представляє насіння, що проходить через сім'япровід 42. Схема обробки визначає розрахунком або з довідкової таблиці відповідність цільовим критеріям кроку висіву і посилає команди виконавчому механізму 38 змінити крок висіву та/або утримування насіння на диску 28. Схемою обробки визначаються відсоток пропусків, відсоток подвоєнь, поточний крок висіву і середній крок висіву. Ця інформація відображається на дисплеї 36 і може використовуватися для зміни кроку висіву схемою обробки, яка посилає сигнал або команду виконавчому механізму 38. Цільові критерії висіву можуть бути простими, такими, як число, яке представляє необхідний крок висіву, можуть включати припустимий відсоток пропусків, відсоток 4 UA 97640 C2 подвоєнь, поточний крок висіву і середній крок висіву, або навіть можуть змінюватися залежно від ділянки на лану і для різних рядкових пристроїв. Вище описаний переважний варіант здійснення, але зрозуміло, що можливі й інші варіанти в межах обсягу цього винаходу. 5 ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 60 1. Посівна машина, яка містить: принаймні один брус для навішування робочих органів; кілька рядкових пристроїв, прикріплених до бруса для навішування робочих органів, причому кожен з кількох рядкових пристроїв має: дозувальний пристрій для насіння, що містить висівний диск, який забезпечує дозувальну дію щодо кількох насінин; пристрій для внесення насіння, який одержує насіння із дозувального пристрою для насіння; і датчик насіння, встановлений для виявлення проходження насінин через дозувальний пристрій або пристрій для внесення насіння, причому датчик насіння видає сигнал, який вказує проходження насінин; і схему обробки, яка приймає сигнал з кожного датчика насіння кожного із кількох рядкових пристроїв і залежно від цього визначає параметр внесення насіння, причому залежно від параметра внесення насіння схема обробки вносить зміни до дії дозування насіння. 2. Посівна машина за п. 1, яка відрізняється тим, що параметром внесення насіння є крок висіву. 3. Посівна машина за п. 2, яка відрізняється тим, що додатково має датчик швидкості пересування по землі, який видає сигнал швидкості до схеми обробки, яка залежно від сигналу швидкості визначає крок висіву. 4. Посівна машина за п. 2, яка відрізняється тим, що містить також датчик швидкості обертання висівного диска, пов'язаний із висівним диском, причому датчик швидкості обертання висівного диска видає сигнал швидкості до схеми обробки, яка залежно від сигналу швидкості визначає крок висіву. 5. Посівна машина за п. 2, яка відрізняється тим, що дозувальний пристрій для насіння містить принаймні один видаляч подвоєнь, пристрій для зміни потоку повітря і привід з регульованою швидкістю для висівного диска, з можливістю регулювання підключений до схеми обробки. 6. Посівна машина за п. 5, яка відрізняється тим, що дозувальний пристрій для насіння містить видаляч подвоєнь, з можливістю регулювання підключений до схеми обробки. 7. Посівна машина за п. 6, яка відрізняється тим, що дозувальний пристрій містить також виконавчий механізм, підключений до видаляча подвоєнь, причому дія дозування включає змінювання утримування насіння на диску, причому видаляч подвоєнь змінює утримування при принаймні частковій зміні його положення виконавчим механізмом. 8. Посівна машина за п. 7, яка відрізняється тим, що схема обробки є частиною системи контролю сіяння, розміщеної у задній частині посівної машини, причому система контролю сіяння має зону дисплея, направлену у бік задньої частини посівної машини. 9. Посівна машина за п. 7, яка відрізняється тим, що схема обробки передбачає регулювання з можливістю вибору для зміни принаймні одного з наступного: крок висіву або щільність посіву. 10. Посівна машина за п. 7, яка відрізняється тим, що схема обробки є частиною системи контролю сіяння, причому система контролю сіяння визначає і відображає принаймні одне з наступного: відсотки пропусків, відсотки подвоєнь, щільність посіву, поточний крок висіву і середній крок висіву. 11. Посівна машина за п. 1, яка відрізняється тим, що параметром внесення насіння є задане вікно часу, упродовж якого, як очікується, насіння пройде через датчик насіння. 12. Рядковий пристрій для використання на посівній машині, яка має систему контролю сіяння, який містить: дозувальний пристрій для насіння, що містить висівний диск, який забезпечує дозувальну дію щодо кількох насінин; пристрій для внесення насіння, який одержує насіння із дозувального пристрою для насіння; датчик насіння, встановлений для виявлення проходження насінин через дозувальний пристрій або пристрій для внесення насіння, причому датчик насіння видає сигнал, який вказує проходження насінин; і схему обробки, яка приймає сигнал із датчика насіння, причому схема обробки залежно від сигналу визначає параметр внесення насіння, причому залежно від параметра внесення насіння схема обробки вносить зміни до дії дозування насіння. 5 UA 97640 C2 5 10 15 20 25 30 35 13. Рядковий пристрій за п. 12, який відрізняється тим, що дозувальний пристрій для насіння містить принаймні один видаляч подвоєнь, пристрій для зміни потоку повітря і регульований привід диска з можливістю регулювання підключений до схеми обробки. 14. Рядковий пристрій за п. 13, який відрізняється тим, що дозувальний пристрій для насіння містить видаляч подвоєнь, з можливістю регулювання підключений до схеми обробки. 15. Рядковий пристрій за п. 14, який відрізняється тим, що дозувальний пристрій додатково має виконавчий механізм, підключений до видаляча подвоєнь, причому дія дозування включає змінювання утримування насіння на диску, причому видаляч подвоєнь змінює утримування при принаймні частковій зміні його положення виконавчим механізмом. 16. Спосіб зміни виходу насіння посівної машини, який включає наступні стадії: стадію, на якій виявляють параметр внесення насіння, яке пропускають через дозувальний пристрій для насіння або пристрій для внесення насіння, і стадію, на якій параметр внесення насіння змінюють залежно від цільових критеріїв кроку висіву. 17. Спосіб за п. 16, який відрізняється тим, що стадія змінювання включає стадію, на якій здійснюють принаймні одне з наступного: змінюють швидкість обертання диска у дозувальному пристрої для насіння, змінюють положення видаляча подвоєнь відносно диска або змінюють потік повітря до диска. 18. Спосіб за п. 17, який відрізняється тим, що на стадії змінювання змінюють положення видаляча подвоєнь відносно диска. 19. Спосіб за п. 17, який відрізняється тим, що стадія змінювання включає стадію, на якій змінюють утримування насіння на диску у дозувальному пристрої для насіння залежно від параметра внесення насіння, причому як параметр внесення насіння використовують крок висіву. 20. Спосіб за п. 16, який відрізняється тим, що додатково включає стадію, на якій визначають принаймні одне з наступного: відсотки пропусків, відсотки подвоєнь, поточний крок висіву і середній крок висіву. 21. Спосіб за п. 20, який відрізняється тим, що додатково включає стадію, на якій цільові критерії кроку висіву порівнюють принаймні з одним з наступного: відсотки пропусків, відсотки подвоєнь, поточний крок висіву і середній крок висіву. 22. Спосіб за п. 21, який відрізняється тим, що стадію порівнювання і стадію змінювання здійснюють окремо для кожного рядкового пристрою посівної машини. 23. Спосіб за п. 16, який відрізняється тим, що як цільові критерії кроку висіву використовують заданий період часу, упродовж якого, як очікують, видадуть сигнал з датчика насіння, причому як параметр внесення насіння використовують час проходження насіння через датчик насіння з видачею сигналу, причому цільові критерії кроку висіву для насіння задовольняють при знаходженні часу у межах заданого періоду часу. 6 UA 97640 C2 7 UA 97640 C2 8 UA 97640 C2 9 UA 97640 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюAgricultural seeding system, a row system for use on a seeding machine and a method of altering seed output of a seeding machine
Автори англійськоюPeterson JR. James. R., Rylander David James, Penfold Garn Farley
Назва патенту російськоюСельскохозяйственная посевная система, рядковое устройство для использования на посевной машине и способ изменения выхода семян посевной машины
Автори російськоюПитерсон ДжР. Джеймс Р., Райлендер Дэйвид Джеймз, Пенфолд Гарн Фарли
МПК / Мітки
МПК: A01B 39/12, G06F 7/70, A01C 7/08, G06F 15/00
Мітки: система, рядковий, насіння, посівна, спосіб, посівної, сільськогосподарська, використання, машини, посівний, виходу, зміни, пристрій
Код посилання
<a href="https://ua.patents.su/12-97640-silskogospodarska-posivna-sistema-ryadkovijj-pristrijj-dlya-vikoristannya-na-posivnijj-mashini-ta-sposib-zmini-vikhodu-nasinnya-posivno-mashini.html" target="_blank" rel="follow" title="База патентів України">Сільськогосподарська посівна система, рядковий пристрій для використання на посівній машині та спосіб зміни виходу насіння посівної машини</a>
Пристрій для розкриття і закриття посівної борозни та сільськогосподарська машина, що містить такий пристрій
Номер патенту: 82863
Опубліковано: 26.05.2008
Автори: Кітон Майлз Реймонд, Райлендер Дейвід Джеймз, Томпосон Уільям Хенсен
МПК: A01C 5/00, A01B 49/06
Мітки: закриття, пристрій, містить, посівної, борозни, розкриття, машина, сільськогосподарська
Формула / Реферат:
1. Пристрій для розкриття і закриття посівної борозни в ґрунті, що містить:розкривач (20) борозни, що має пару дисків (52), які розташовані під гострим кутом () відносно один одного, при цьому кожен диск (52) має внутрішню (58) і зовнішню сторону (60), при цьому внутрішні сторони (58) дисків обернені одна до одної, а зовнішні сторони (60) розташовані протилежно одна...
Бункер для використання з сільськогосподарською машиною (варіанти), сільськогосподарська машина, датчик рівня заповнення бункера для використання в бункері сільськогосподарської машини
Номер патенту: 96005
Опубліковано: 26.09.2011
Автор: Ковальчук Тревор
МПК: G01F 23/28, A01D 75/00, A01C 7/20
Мітки: сільськогосподарська, використання, заповнення, бункера, датчик, машини, сільськогосподарсько, бункері, рівня, варіанти, машиною, сільськогосподарською, бункер, машина
Формула / Реферат:
1. Бункер для використання з сільськогосподарською машиною, виконаний з можливістю утримування сільськогосподарського продукту, який повинен селективно виводитися, коли сільськогосподарська машина проходить по полю, який містить:ємність, виконану з можливістю розміщення сільськогосподарського продукту, який розподіляється по полю; ідатчик, розміщений в ємності, з'єднаний магнітним способом з ємністю і виконаний з можливістю...
Сільськогосподарська посівна машина з компактним сошником/загортачем
Номер патенту: 92189
Опубліковано: 11.10.2010
Автори: Фрейзьєр Майкл Є., Флауерс Роналд Т., Маріман Натан А.
МПК: A01C 5/00, A01B 15/00
Мітки: машина, компактним, сільськогосподарська, посівна
Формула / Реферат:
1. Сільськогосподарська посівна машина, що може рухатися у напрямку посадки, яка містить:раму;вузол дискового сошника, який переноситься зазначеною рамою, який включає пару дисків сошника, зовнішня сторона кожного з яких відвернута від зазначеної рами, і має першу вісь обертання;вузол копіювального колеса, який переноситься зазначеною рамою, який включає пару копіювальних коліс, кожне на зовнішній стороні відповідного...
Система для контролю висіву насіння
Номер патенту: 62849
Опубліковано: 12.09.2011
Автор: Журкіна Надія Миколаївна
МПК: G01D 9/00, G01D 5/00, A01C 7/00
Мітки: система, висіву, насіння, контролю
Формула / Реферат:
Система для контролю висіву насіння, що містить монітор, блок обробки даних, кабельну розводку сіялки, датчики висіву насіння та датчик шляху, програму, зашиту в контролер блоку обробки даних, яка відрізняється тим, що вимірювальний елемент датчика висіву насіння виконаний у вигляді металевої конструкції, в тіло якої вмонтовано пластини і фольгованого склотексталіту, які служать обкладками вимірювального конденсатора, екран монітора...
Спосіб підвищення урожаю насіння і виходу олії у ріпаку
Номер патенту: 64920
Опубліковано: 15.03.2004
Автори: Рогач Віктор Васильович, Гуляєв Борис Іванович, Кур'ята Володимир Григорович
МПК: A01N 61/00, A01P 21/00, A01G 7/00
Мітки: підвищення, урожаю, ріпаку, виходу, спосіб, олії, насіння
Формула / Реферат:
Спосіб підвищення урожаю насіння і виходу олії ріпаку шляхом обприскування рослин речовиною ретардантної дії, який відрізняється тим, що як речовину ретардантної дії використовують водний розчин препарату культар (25 % емульсія паклобутразолу (2,4-диметил-1-(1,2,4-триазоліл-1)-1-(4-хлорфеніл) пентанол-3), похідне 1,2,4-триазолу) в концентрації 0,10 % (0,025 % діючої речовини паклобутразолу), при цьому обробку рослин здійснюють на початку...
Попередній патент: Октагідропіроло[3,4-b]пірольні похідні, спосіб їх одержання та застосування їх як рецепторів гістаміну-3
Наступний патент: Водна суспензія 4-[[4-[[4-(2-ціаноетеніл)-2,6-диметилфеніл]аміно]-2-піримідиніл]аміно]бензонітрилу (tmc278)
Випадковий патент: Вогнезахисний препарат "flame stop"