Пристрій для вібронакатування
Номер патенту: 9926
Опубліковано: 30.09.1996
Автори: Івахненко Микола Миколайович, Козленко Олександр Олександрович, Галь Анатолій Феодосійович
Формула / Реферат
(57) 1. Устройство для вибронакатывания, содержащее держатель, установленную в держателе инструментальную головку, несущую подпружиненные в осевом направлении деформирующие элементы и связанную через кинематическое звено, включающее рычаг с эксцентриком, установленным на валу электропровода, отличающееся тем, что оно снабжено копиркулачком, выполненным с эксцентрично расположенной относительно его оси цапфой, имеющей винтовой паз, шаговым электродвигателем, блоком управления, соленоидом, установленным на державке инструмента, дополнительным деформирующим элементом, приводом его осевого поступательного перемещения, блоком питания, толкателем головки, кинематическим звеном связи копир-кулачка с шаговым электродвигателем, при этом дополнительный деформирующий элемент установлен внутри основного, соосно с ним, с возможностью относительного перемещения, толкатель соединен с сердечником соленоида, а обмотка соленоида через блок управления соединена с шаговым электродвигателем, цапфа копир-кулачка установлена в отверстии эксцентрика, привод перемещения дополнительного деформирующего элемента выполнен в виде концентрично установленных стержня и пружины, выполненных из материала, обладающего памятью формы.
2. Устройство по п.1, о т л и ч а ю щ е е-с я тем, что кинематическое звено связи копир-кулачка с шаговым электродвигателем выполнено в виде установленной на цапфе кулисы, соединенной с шаговым винтом, на котором установлена шестерня, входящая в зацепление с зубчатым колесом, установленным на валу шагового электродвигателя.
Текст
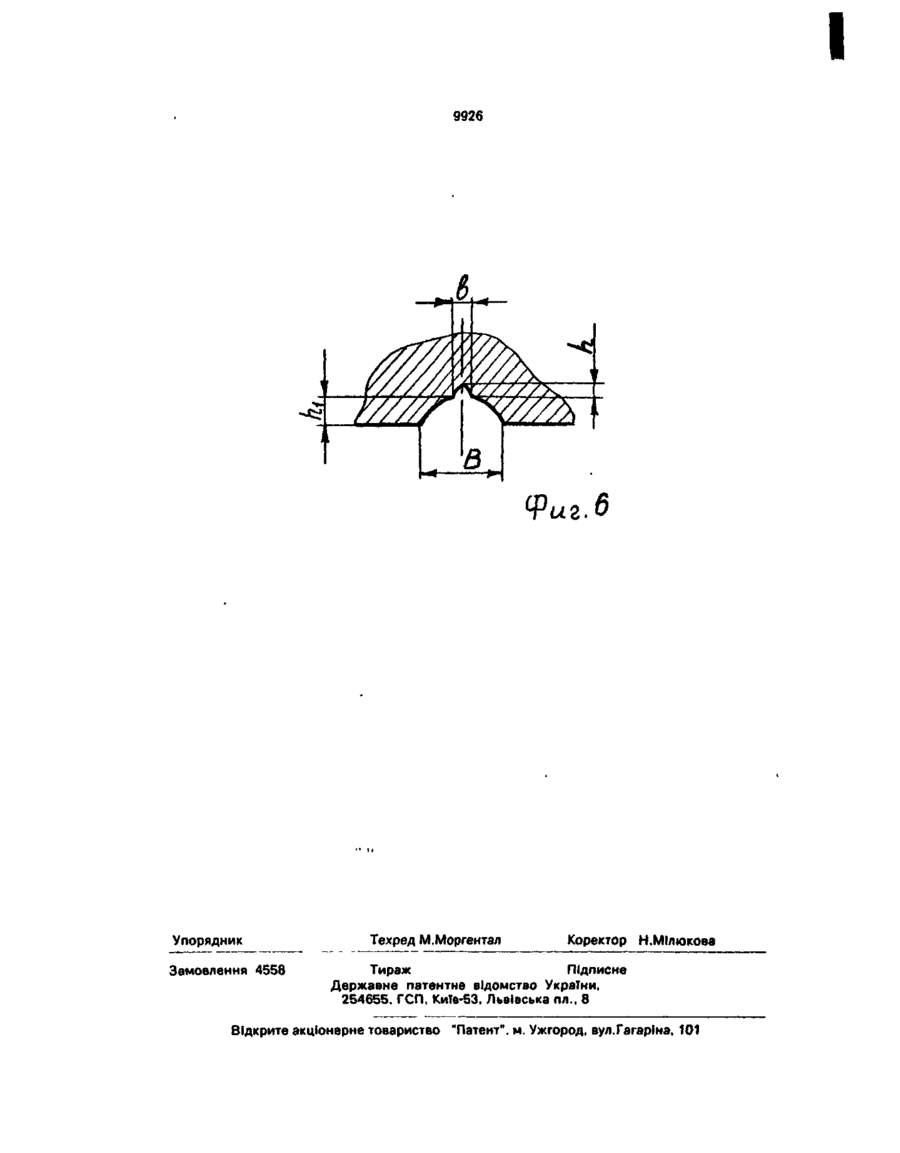
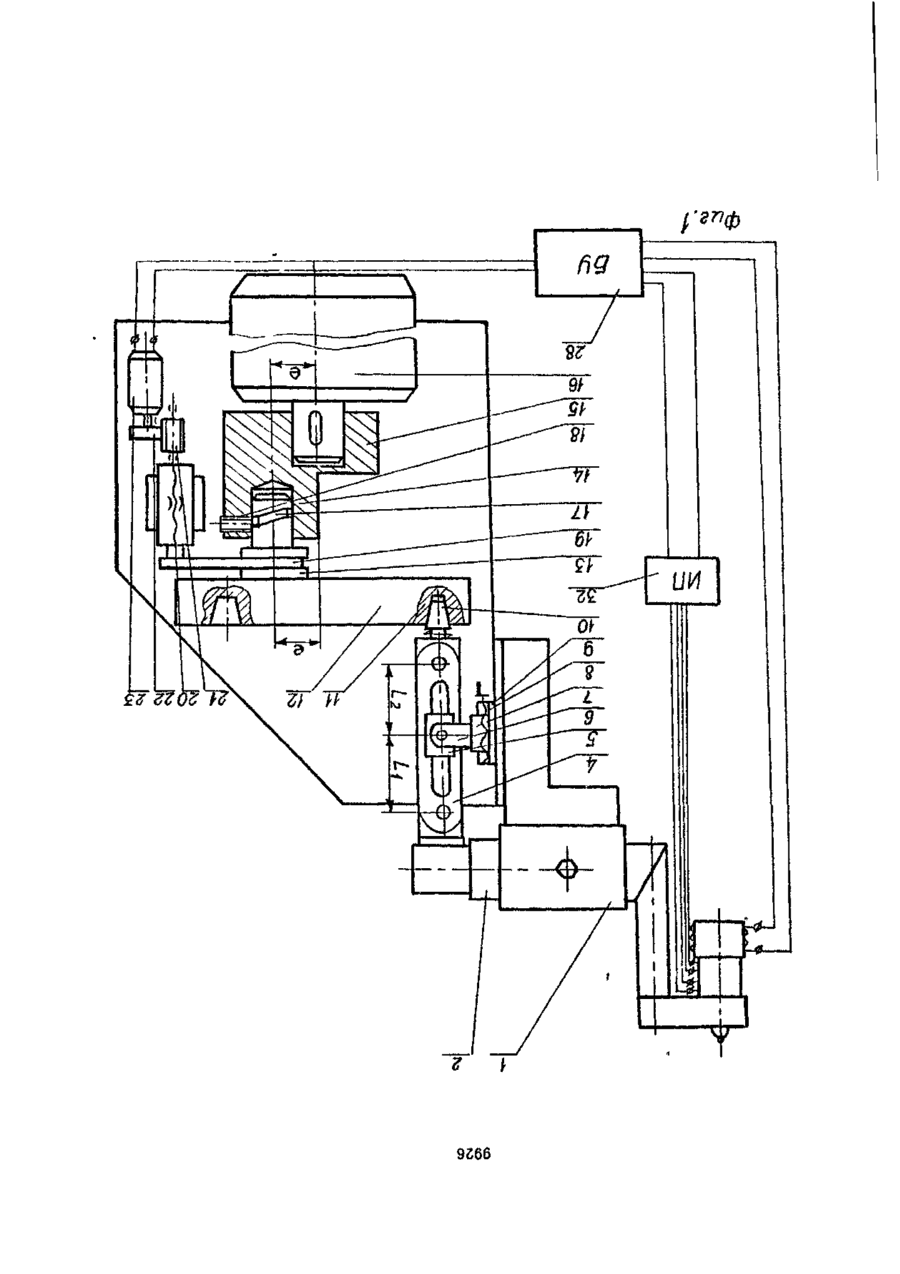
1. Устройство для вибронакатывания, содержащее держатель, установленную в держателе инструментальную головку, несущую подпружиненные в осевом направлении деформирующие элементы и связанную через кинематическое звено, включающее рычаге эксцентриком, установленным на валу электропровода, о т л и ч а ю щ е е с я тем, что оно снабжено копир-кулачком, выполненным с эксцентрично расположенной относительно его оси цапфой, имеющей винтовой паз, шаговым электродвигателем, блоком управления, соленоидом, установленным на державке Изобретение относится к обработке металлов поверхностным пластическим деформированием и предназначено для использования в машиностроении при обработке поверхностей деталей механизмов и машин для создания оптимальных условий эксплуатации трущихся пар и образова инструмента, дополнительным деформирующим элементом, приводом его осевого поступательного перемещения, блоком питания, толкателем головки, кинематическим звеном связи копир-кулачка с шаговым электродвигателем, при этом дополнительный деформирующий элемент установлен внутри основного, соосно с ним, с возможностью относительного перемещения, толкатель соединен с сердечником соленоида, а обмотка соленоида через блок управления соединена с шаговым электродвигателем, цапфа копир-кулачка установлена в отверстии эксцентрика, привод перемещения дополнительного деформирующего элемента выполнен в виде концентрично установленных стержня и пружины, выполненных из материала, обладающего памятью формы. 2. Устройство по п.1, о т л и ч а ю щ е ес я тем, что кинематическое звено связи копир-кулачка с шаговым электродвигателем выполнено в виде установленной на цапфе кулисы, соединенной с шаговым винтом, на котором установлена шестерня, входящая в зацепление с зубчатым колесом, установленным на валу шагового электродвигателя. ния поверхностей с высокими декоративными свойствами. Известно устройство для обработки наружных поверхностей поверхностным пластическим деформированием, содержащее шариковые головки с деформирующими эле С > N3 О 9926 ментами, связанные с приводом осцилляции. Недостатками известного устройства являются: ограниченные технологические возможности, не позволяющие регулиро- В вать в процессе обработки глубину образуемой канавки, необходимость остановки станка для регулирования расстояния между шариковыми головками, сложность и низкая точность установки этого расстояния, 10 что снижает производительность и технологические возможности, значительные габариты устройства. В основу изобретения поставлена задача усовершенствования устройства для виб- 15 ронакатывания путем установки дополнительного деформирующего элемента со своими приводом и системой управления, обеспечивающими плавное регулирование геометрических параметров 20 канавки и за счет этого, повышение производительности, уменьшение габаритных размеров и расширение технологических возможностей устройства. Поставленная задача решается тем, что 25 в устройстве для вибронакатывания, содержащем держатель, установленную в держателе инструментальную головку, несущую подпружиненные в осевом направлении деформирующие элементы и связанную через 30 кинематическое звено, включающее рычаг с эксцентриком, установленным на валу электропривода! согласно изобретению, копир кулачком, выполненным с эксцентрично расположенной относительно его оси цапфой, 35 имеющей «зинтовой паз, шаговым электродвигателем, блока управления, соленоидом, установленным на державке инструмента, дополнительным деформирующим элементом, приводом его осевого поступательного 40 перемещения, блоком питания, толкателем головки, кинематическим звеном связи копир - кулачка с шаговым электродвигателем, при этом дополнительный деформирующий элемент установлен внутри основного, соос- 45 но с ним, с возможностью относительного перемещения, толкатель соединен с сердечником соленоида, а обмотка соленоида через блок управления соединена с шаговым электродвигателем, цапфа копир-кулачка 50 установлена в отверстии эксцентрика, привод перемещения дополнительного деформирующего элемента выполнен в виде концентрично установленных стержня и пружины, выполненных из материала, обла- 55 дающего памятью формы. Кроме того, кинематическое звено связи копир - кулачка с шаговым электродвигателем выполнено в виде установленной на цапфе кулисы, соединенной с шаговым вин том, на котором установлена шестерня, входящая в зацепление с зубчатым колесом, установленным на валу шагового электродвигателя. Выполнение дополнительного деформирующего элемента внутри основного и снабжение его приводом осевого перемещения, представляющим концентрично установленные стержень и пружину, изготовленные из материалов, обладающего памятью формы, а также введение копикулачка, шагового электродвигателя и кинематического звена связи между ними, блока управления и соленоида позволяет плавно изменить в процессе обработки геометрические параметры канавки (глубину, ширину, амплитуду) и таким образом расширить технологические возможности, повысить производительность и уменьшить габаритные размеры устройства. Сущность изобретения поясняется чертежами, где на фиг.1 изображено предлагаемое устройство, на фиг.2 - пример выполнения канавок на копире, на фиг.З схема изменения положения оси копира, на фиг.4 - инструментальная головка, на фиг.5,6 - виды рельефов и профиль канавки. Устройство содержит корпус с инструментальной головкой 1, закрепленной, например, в резце-держателе токарно-винторезного станка, держатель инструментальной головки , 2, основной деформирующий элемент 3. Держатель 2 связан шарнирно с одним концом рычага 4, в паз которого входит сухарь 5, установленный шарнирно на оси стойки 6, закрепленный на ползуне 7. Винт 8 предназначен для одновременного перемещения ползуна 7 со стойкой 6 по направляющей 9 и сухаря 5 по пазу рычага 4. На втором конце рычага 4 установлен подпружиненный копирный ролик 10, который входит в зигзагообразную канавку 11 на торцевой поверхности копиркулачка 12. Копир 12 выполнен с эксцентрично расположенной относительно его оси цапфой 13, которая входит в отверстие 14 эксцентрика 15, установленного на валу привода 16. На цапфе 13 выполнен винтовой паз 17. Винт 18 предназначен для фиксации копира 12, который через кулису 19, соединенную с винтом 20, на котором установлена шестерня 21, находящаяся в зацеплении с колесом 22, связан с шаговым электродвигателем 23. Прижатие основного деформирующего элемента 3 к поверхности обрабатываемой • детали осуществляется толкателем 24, связанным через нагруженную пружину 25 с сердечником 26 соленоидом 27. Обмотка соленоида 27 и шаговый электродвигатель 23 9926 соединены с блоком управления 28. Для перемещения дополнительного деформирующего элемента 29 предназначена приводная пружина 30 и стержень 31, выполненные из материала, обладающего памятью фор- 5 мы, например, из никелида титана, которые соединены через источник питания 32 с блоком управления 28. Устройство работает следующим образом. Корпус с инструментальной головкой 1 10 закреплен, например, в резцедержателе то* карно-винторезного станка. Основной деформирующий элемент 3 прижат к обрабатываемой поверхности детали пружиной 25. При включении привода 16 враще- 15 ние от вала привода получает эксцентрик 15 и копир 12. Вращательное движение копира 12 через подпружиненный ролик 10, который входит в зигзаообразную канавку 11 и рычаг 4 преобразуется в возвратно-посту- 20 пательное движение держателя инструментальной головки 2 и деформирующего элемента 3. При помощи винта 8 изменяется положение ползуна 7 со стойкой 6 на направляющей 9 и сухаря 5 в пазу рычага 4. 25 При этом плавно изменяются значения плеч. U и 12 рычага 4 и соответственно величина _ амплитуды колебания держателя 2 с деформирующим элементом 3. Для изменения положения копира 12 из 30 блока управления 28 подается сигнал на шаговый двигатель 23. Вращение электродвигателя 23 через колесо 22, шестерню 23 и винт 20 преобразуется в поступательное движение кулисы 19, которая связана с цап- 35 фой 13 копира 12. За счет выполнения на цапфе винтового паза 17 копир получает винтовое движение, при этом изменяется положение его оси относительно оси вращения привода 16 в пределах от 0 до 2е. где е- 40 величина эксцентриситета эксцентрика 15 и цапфы 13 копира 12. Вследствие чего зигзагообразная канавка 11, выполненная относительно оси вращения привода 16 и на обрабатываемой поверхности деформирующий элемент 3 выдавливает канавку с рельефом, отличающимся от рельефа, полученного при соединении оси копира 12 с осью вращения привода 16, т.е. при е - 0. Для изменения глубины hi и ширины В выдавливаемого микрорельефа из блока управления 28 подается сигнал на соленоид 27, сердечник 26 которого воздействует на деформирующий элемент 3 через нагружающую пружину 25 и толкатель 24. При подаче сигнала из блока управления 28 через источник питания 32 на приводную пружину 30 или стержень 31 происходит перемещение дополнительного деформирующего элемента 29, что вызывает изменение глубины и ширины выдавливаемой канавки. При прохождении тока через приводную пружину 30 последняя нагревается и распрямляется, выдвигая при этом дополнительный деформирующий элемент 29. Нагревание стержня 31 при пропускании через него тока вызывает уменьшение его длины и встроенный деформирующий элемент утапливается. Приводная пружина и стер" жень выполняются изолированными друг от друга и от остальных элементов деформирующей головки. Та..им образом изменяя усилие прижатия основного деформирующего элемента 3 и дополнительного элемента 29, а также положение корпуса 12 и конфигурацию канавки 1 1 , можно получить практически неограниченный диапазон регулярных рельефов с переменными геометрическими параметрами канавки. 9Z66
ДивитисяДодаткова інформація
Назва патенту англійськоюVibrating roller burnishing
Автори англійськоюIvakhnenko Mykola Mykolaiovych, Hal Anatolii Feodosiiovych, Kozlenko Oleksandr Oleksandrovych
Назва патенту російськоюУстройство для вибронакатки
Автори російськоюИвахненко Николай Николаевич, Галь Анатолий Феодосьевич, Козленко Александр Александрович
МПК / Мітки
МПК: B24B 39/00
Мітки: пристрій, вібронакатування
Код посилання
<a href="https://ua.patents.su/12-9926-pristrijj-dlya-vibronakatuvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вібронакатування</a>
Пристрій для вимірювання фазового зсуву
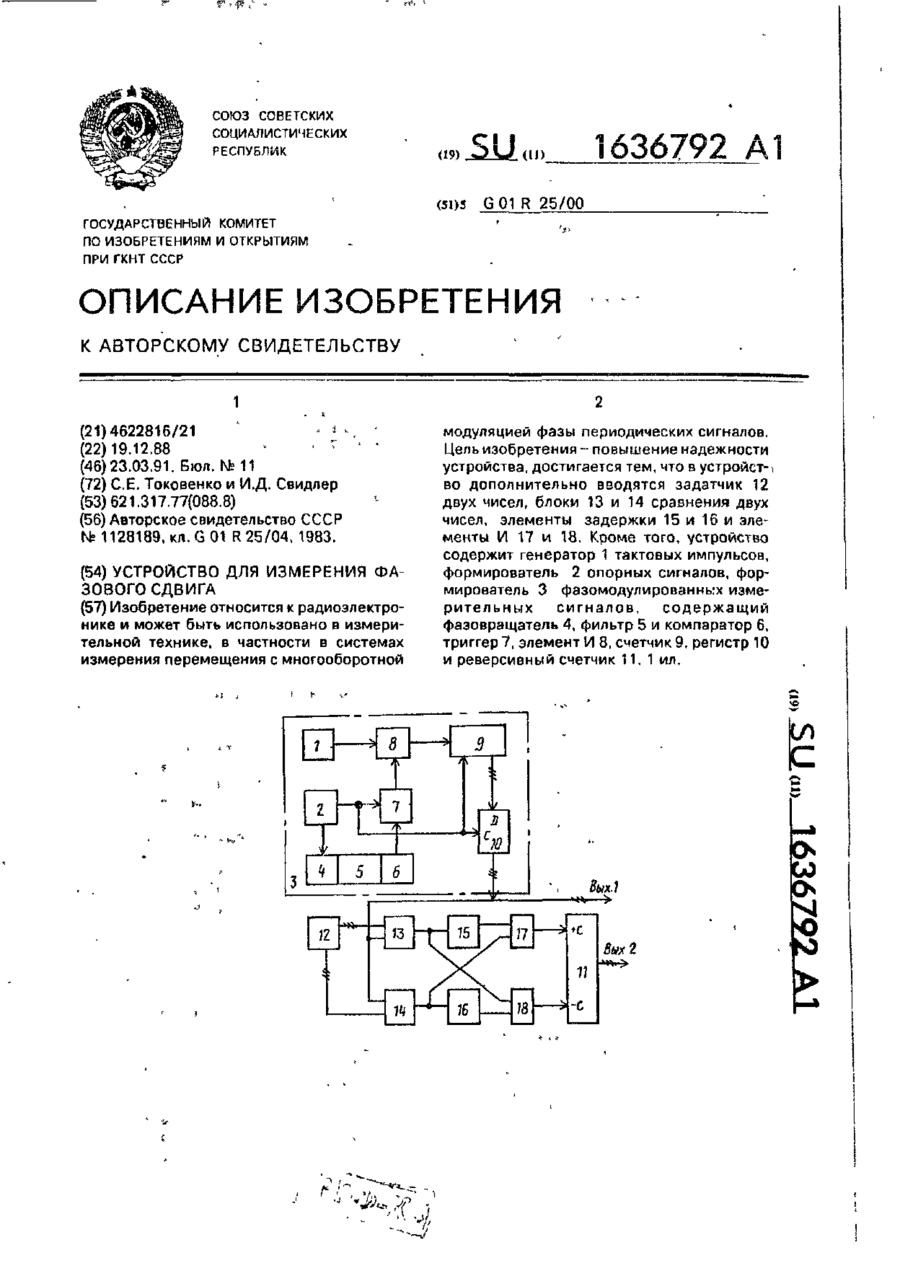
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: фазового, вимірювання, пристрій, зсуву
Формула / Реферат:
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій для керування тиристорним перетворювачем
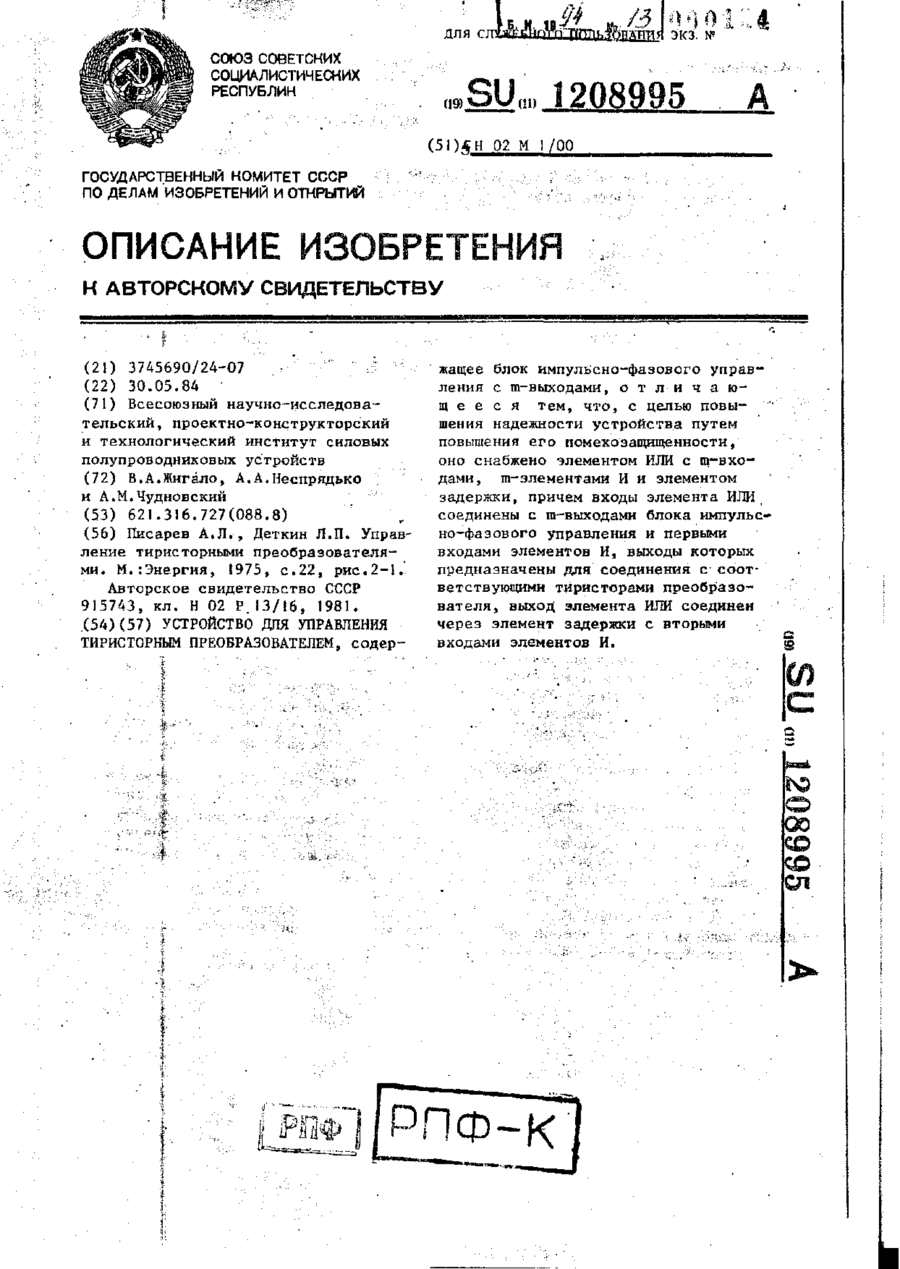
Номер патенту: 8809
Опубліковано: 30.09.1996
Автори: Жигало Володимир Олександрович, Чудновський Олександр Михайлович, Неспрядько Ала Аркадіївна
Мітки: керування, тиристорним, перетворювачем, пристрій
Формула / Реферат:
Устройство для управления тиристорным преобразователем, содержащее блок импульсно-фазового управления с m-выходами, отличающееся тем, что, с целью повышения надежности устройства путем повышения его помехозащищенности, оно снабжено элементом ИЛИ с m-входами, m-элементами И и элементом задержки, причем входы элемента ИЛИ соединены с m-выходами блока импульсно-фазового управления и первыми входами элементов И, выходы которых предназначены...
Пристрій для вимірювання переміщень
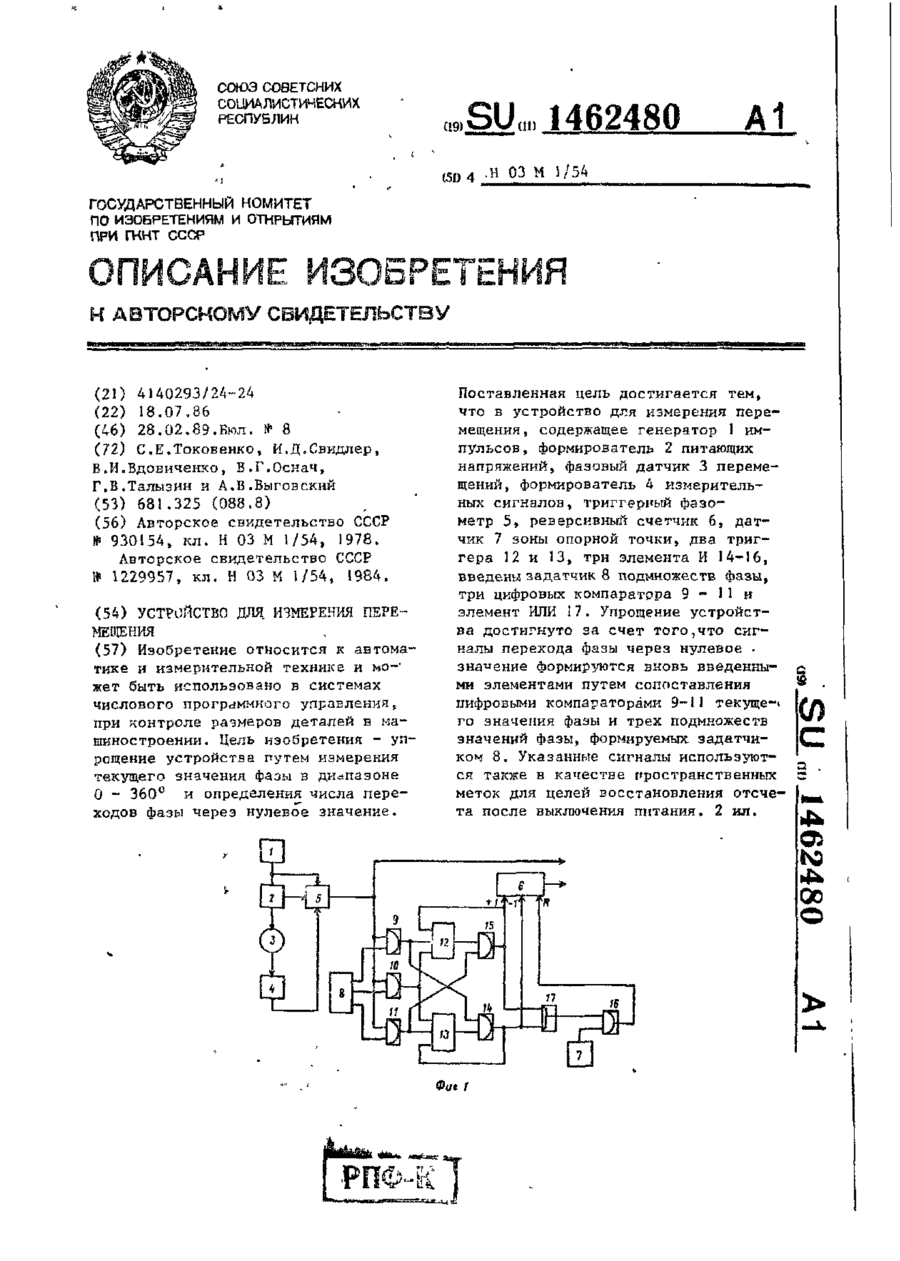
Номер патенту: 454
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович, Тализін Григорій Володимирович, Вдовиченко Валерій Іванович, Виговський Олександр Володимирович, Оснач Віктор Григорович
МПК: H03M 1/50
Мітки: вимірювання, пристрій, переміщень
Формула / Реферат:
Формула изобретенияУстройство для измерения перемещения, содержащее генератор импульсов, выход которого соединен с входом формирователя питающих напряжений и с первым входом триггерного фазометра, второй вход которого подключен к первому выходу формирователя питающих напряжений, второй выход которого соединен с входом фазового датчика перемещений, выход которого через формирователь измерительных сигналов подключен к третьему входу...
Пристрій для гідростатичного волочіння тонкого дроту
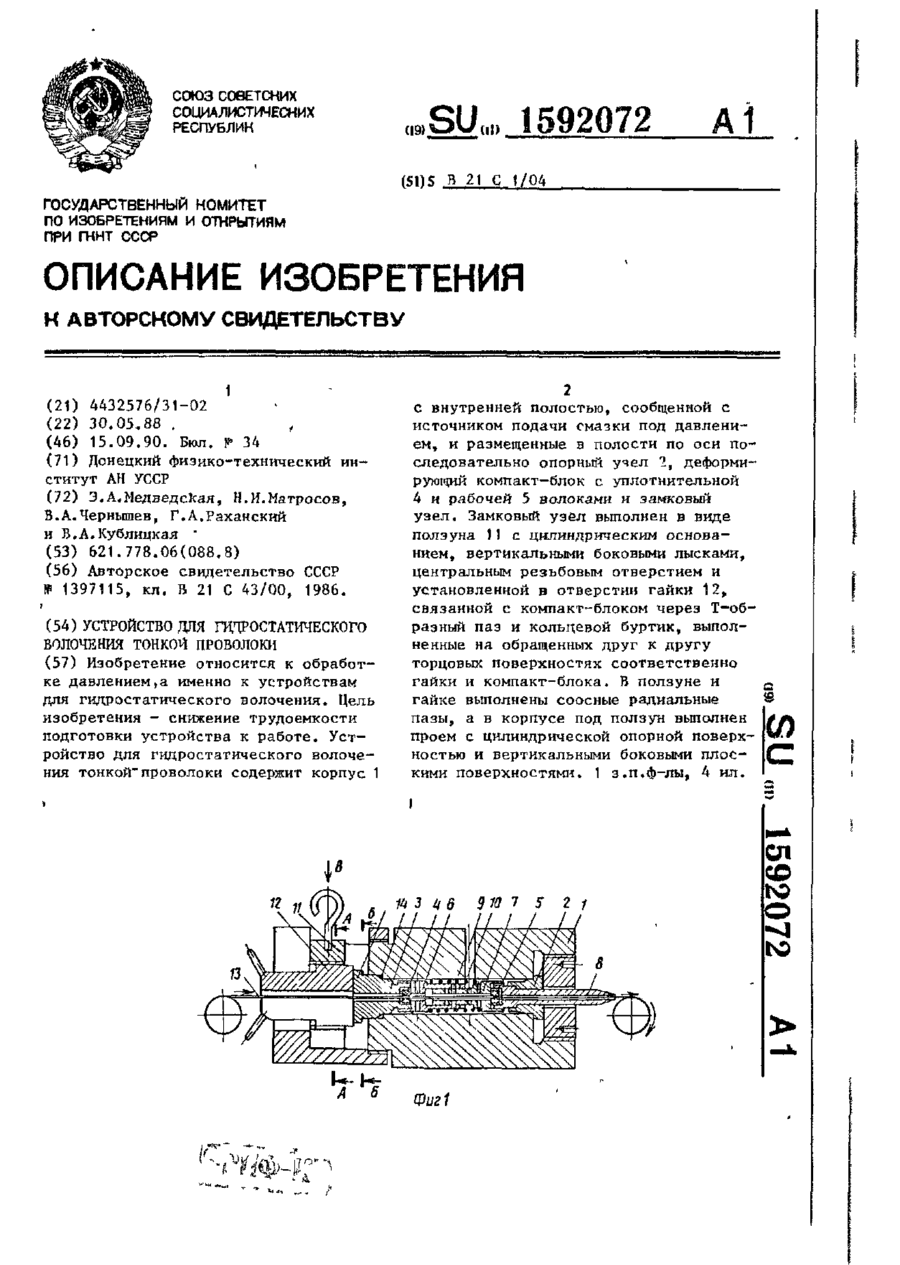
Номер патенту: 636
Опубліковано: 15.12.1993
Автори: Матросов Микола Іванович, Чернишев Владислав Анатолійович, Кублицька Валентина Олександрівна, Медведська Ельвіда Олександрівна, Раханський Генадій Афанасійович
МПК: B21C 1/02
Мітки: дроту, волочіння, тонкого, пристрій, гідростатичного
Текст:
...входит в зацепление с матрицедержателем 3, а продольный паз^ выполненный в ползуне, и гайка дают возможность осуществить это, не воздействуя на длинномерную проволочную заготовку, используемую в форме катуш ки, и исключая вероятность ее обрьюа. Затем поворотом гайки в пределах до 180° деформирующий компакт-блок продвигается дальше и, соприкасаясь с уплотнительным элементом 14, мягко, без присущей клиновому затвору динамики t сжимает...
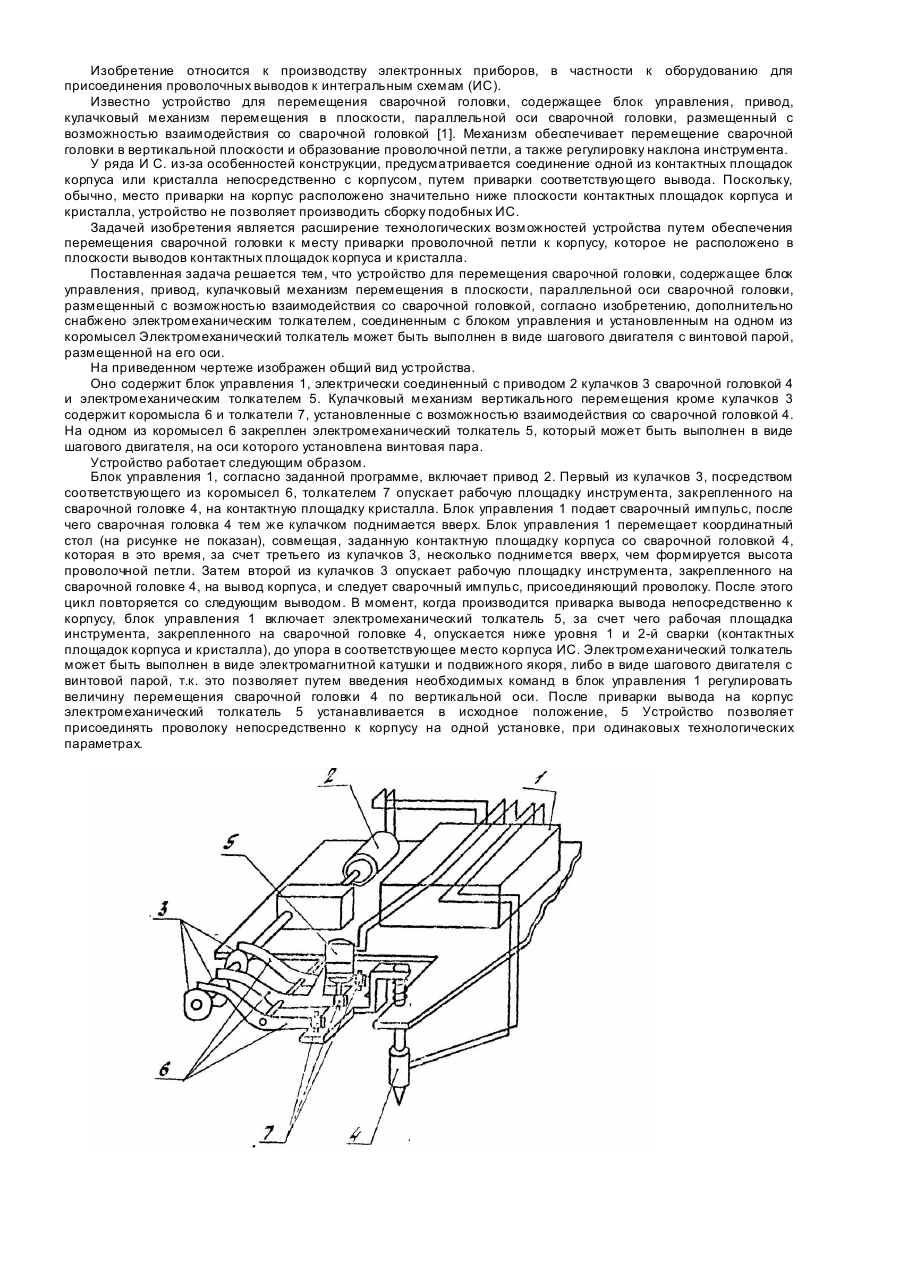
Пристрій для переміщення зварювальної головки
Номер патенту: 2640
Опубліковано: 26.12.1994
Автори: Молчанов Костянтин Вікторович, Хомін Ігор Богданович, Куляк Михайло Васильович
МПК: H01L 21/60
Мітки: зварювальної, переміщення, пристрій, головки
Формула / Реферат:
1. Устройство для перемещения сварочной головки, содержащее блок управления, привод, кулачковый механизм перемещения в плоскости, параллельной оси сварочной головки, размещенный с возможностью взаимодействия со сварочной головкой, отличающееся тем, что кулачковый механизм перемещения снабжен электромеханическим толкателем, соединенным с блоком управления и установленным на одном из коромысел.2. Устройство по п.1, отличающееся тем, что...
Попередній патент: Спосіб виготовлення охолоджуючого пристрою
Наступний патент: Система для піднімання затонулих об’єктів
Випадковий патент: Прямоточний клапан