Система забезпечення стабілізації/стійкості корабля при кільовій хитавиці
Номер патенту: 103608
Опубліковано: 25.12.2015
Автори: Косяковський Андрій Валерійович, Комаров Володимир Олександрович, Расстригін Олександр Олексійович, Куровська Тетяна Юріївна, Чабаненко Павло Павлович
Формула / Реферат
1. Система забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що містить цистерни, розташовані всередині корпусу корабля по його довжині від носової до кормової частин, зв'язані між собою трубопроводами, перекачувальні насоси, блок керування, ЕОМ та датчик хитавиці корабля, при цьому блок керування зв'язаний зворотним зв'язком з ЕОМ, датчик хитавиці з'єднаний з ЕОМ, ЕОМ зв'язана каналами керування з перекачувальними насосами, перекачувальний насос встановлено в магістралі нагнітання, що являє собою трубопровід між парою сусідніх баків, причому цистерни заповнено водою не менше, ніж наполовину, яка відрізняється тим, що до складу системи додатково введено активний стабілізатор хитавиці та виконавчий механізм керування активним стабілізатором хитавиці, при цьому активний стабілізатор хитавиці закріплено шарнірно до зовнішньої поверхні корпусу корабля по торцю кормової частини корабля у вузлі повороту та з'єднано з виконавчим механізмом, виконавчий механізм керування активним стабілізатором хитавиці з'єднано з ЕОМ, активний стабілізатор хитавиці закріплено вісесиметрично поздовжній осі корабля, активний стабілізатор хитавиці закріплено у вузлі повороту з можливістю його відхилення вверх/вниз на кут не менше 60° відносно осі повороту, що проходить по вузлах повороту, вісь повороту активного стабілізатора хитавиці розміщено паралельно поперечній осі корабля та перпендикулярно поздовжній осі корабля, вісь повороту активного стабілізатора хитавиці розміщено нижче ватерлінії корабля на відстані, при якій задня кромка активного стабілізатора хитавиці знаходиться у воді при його відхиленні відносно осі повороту на максимальний кут вверх.
2. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці виконано довжиною не більше ширини кормової частини корабля і шириною не менше 1/4 довжини зазначеного активного стабілізатора хитавиці.
3. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці виконано прямокутної або трапецеподібної форми в плані зі звуженням бічних сторін у бік вільного торця зазначеного активного стабілізатора хитавиці.
4. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці виконано плоскої форми або аеродинамічної форми із симетричним профілем у поперечному перерізі.
5. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці розміщено над гвинтами корабля на відстані, при якій задня кромка активного стабілізатора хитавиці перекриває струмінь потоку води, що відкидається гвинтами, при його відхиленні відносно осі повороту на максимальний кут вниз.
Текст
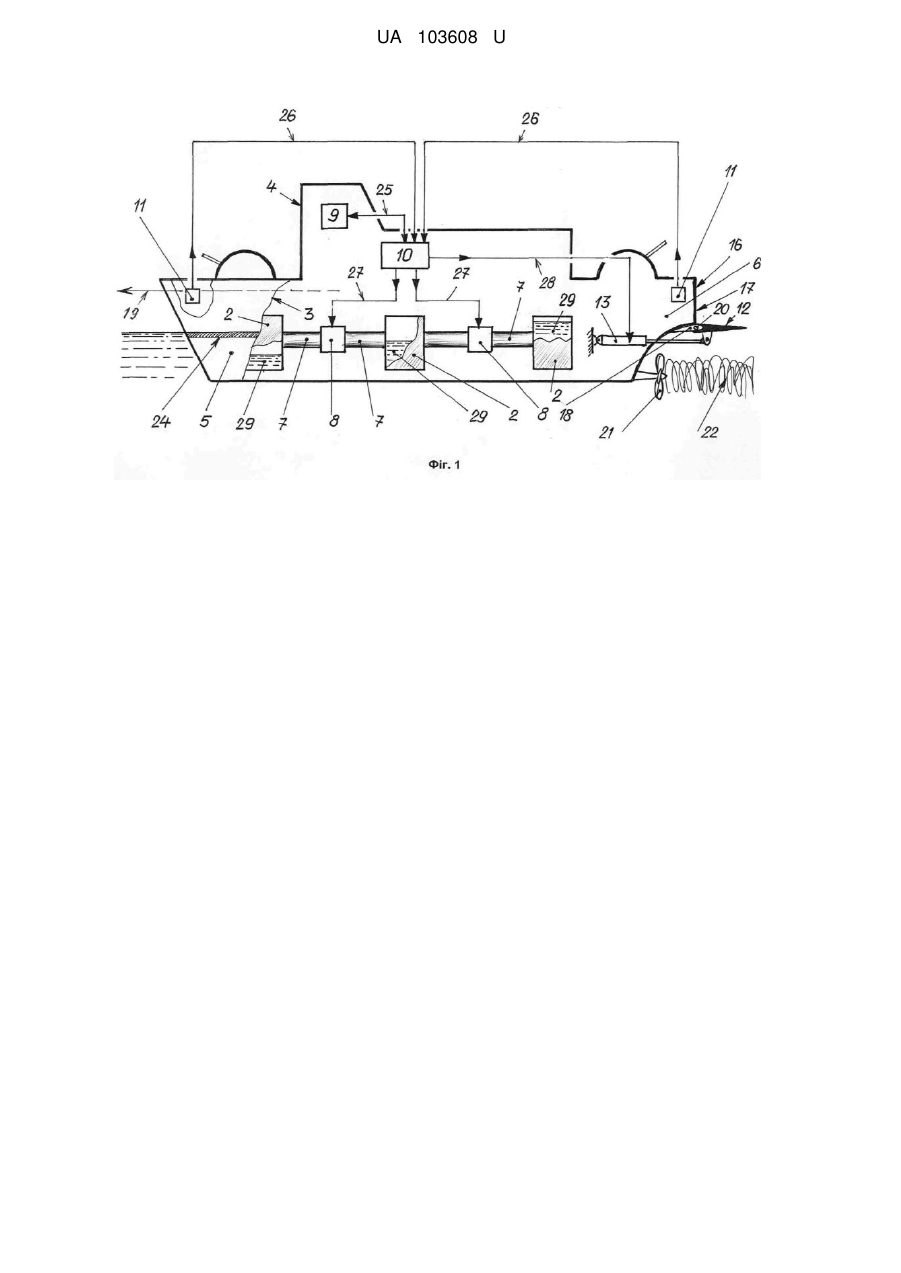
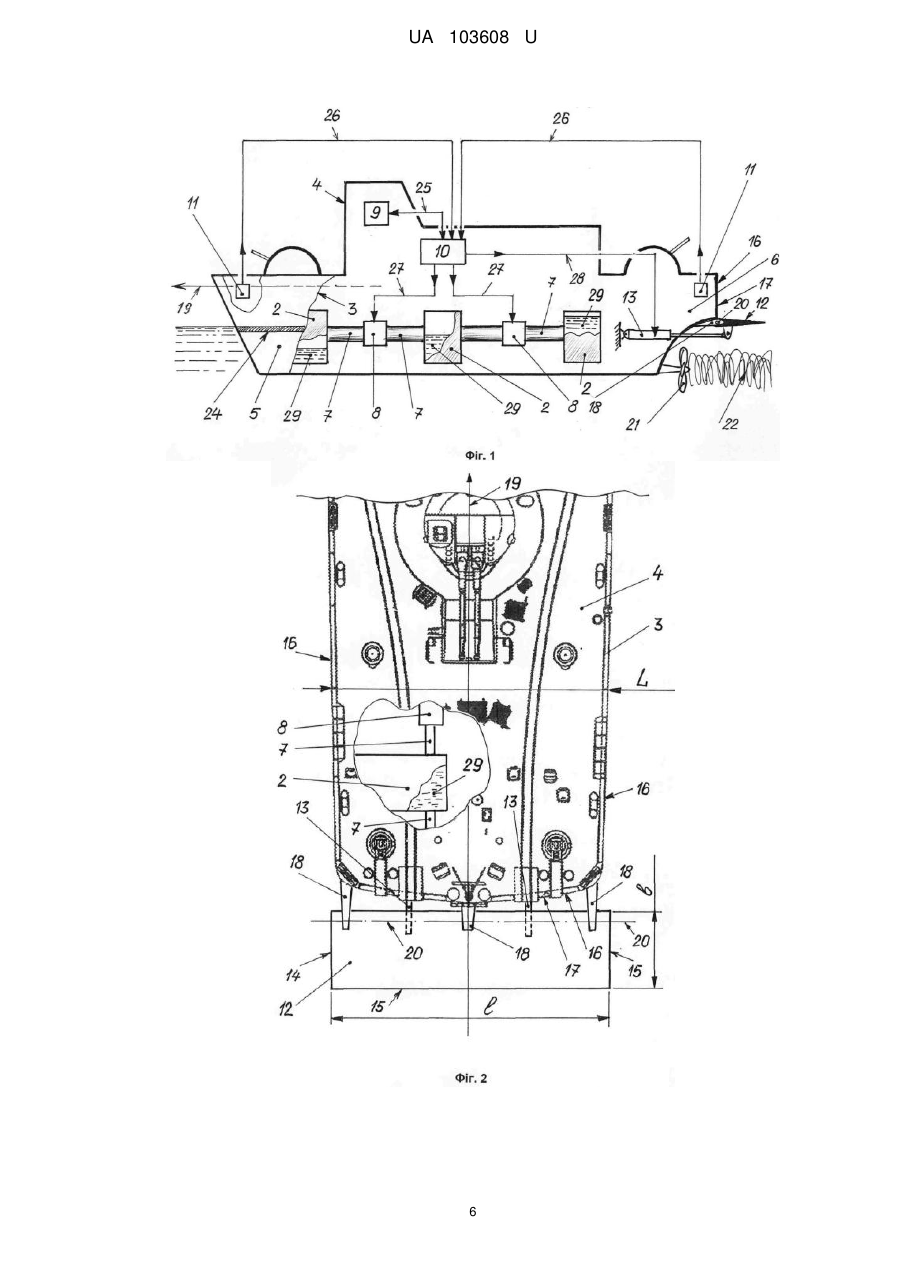
Реферат: Система забезпечення стабілізації/стійкості корабля при кільовій хитавиці містить цистерни, розташовані всередині корпусу корабля по його довжині від носової до кормової частин, зв'язані між собою трубопроводами, перекачувальні насоси, блок керування, ЕОМ та датчик хитавиці корабля. До складу системи додатково введено активний стабілізатор хитавиці та виконавчий механізм керування активним стабілізатором хитавиці. UA 103608 U (12) UA 103608 U UA 103608 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі кораблебудування, зокрема до систем корабля, а саме до систем забезпечення стабілізації/стійкості корабля при кільовій хитавиці, і може бути застосована на кораблях водотоннажністю від 100 і більше тон. Кільова хитавиця - змінне нахилення плаваючого судна (корабля) на ніс і корму під дією хвилювання або інших зовнішніх сил. Кільова хитавиця погіршує умови роботи механізмів, приладів, озброєння, установленого на кораблі. Також кільова хитавиця викликає зниження швидкості ходу судна (корабля), негативно діє на організм людини, приводячи до погіршення самопочуття й втрати працездатності, на кораблях призводить до неможливості використовувати встановлені бойові системи, виводячи тим самим їх з боєздатності, при значних амплітудах може призвести до втрати стійкості судна (корабля) і його затоплення [1]. Система забезпечення стабілізації/стійкості корабля при кільовій хитавиці повинна забезпечувати зменшення амплітуди коливань у поздовжньому каналі при русі по схвильованій водній поверхні за рахунок зміни центрування корабля (судна), що дозволяє підвищити ефективність застосування артилерійського озброєння корабля щодо прицільної стрільби, розширити межі його морехідності тощо [2]. Відома система забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що містить заповнену рідиною ємність, розміщену в корпусі корабля, яка з'єднана з нагнітаючим патрубком меншою мірою одного насоса, і що має меншою мірою один зливальний отвір [3]. До недоліків відомої системи забезпечення стабілізації/стійкості корабля при кільовій хитавиці належить те, що вона має певну інерційність та передбачає використання потужних енергетичних установок (насосів) для здійснення перекачування баласту (води) з однієї цистерни у другу, розташованих по довжині корпусу корабля. Встановлення потужних енергетичних установок (насосів) і автоматичного пристрою, що керує роботою насосу, значно ускладнює й здорожує конструкцію. Найбільш близьким технічним рішенням, як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є система забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що містить цистерни, розташовані всередині корпусу корабля по його довжині від носової до кормової частин, зв'язані між собою трубопроводами, перекачувальні насоси, блок керування, ЕОМ та датчик хитавиці корабля, при цьому блок керування зв'язаний зворотним зв'язком з ЕОМ, датчик хитавиці з'єднаний з ЕОМ, ЕОМ зв'язана каналами керування з перекачувальними насосами, перекачувальний насос встановлено в магістралі нагнітання, що являє собою трубопровід між парою сусідніх баків, причому цистерни заповнено водою не менше, ніж наполовину [3]. До недоліків відомої системи забезпечення стабілізації/стійкості корабля при кільовій хитавиці, яку вибрано за найближчий аналог (прототип), належить те, що вона має певну інерційність та передбачає використання потужних перекачувальних насосів (енергетичних установок) для здійснення перекачування баласту (води) з однієї цистерни у другу, розташованих по довжині корпусу корабля. Це не дозволяє ефективно застосовувати артилерійське озброєння корабля щодо прицільної стрільби, розширити межи морехідності корабля тощо. В основу корисної моделі поставлено задачу шляхом встановлення на торцю кормової частини корабля активного стабілізатора хитавиці, який розміщено у воді нижче ватерлінії над гвинтами з можливістю відхилення на кут ± 60° вверх/вниз відносно поздовжньої осі корабля, і який встановлено своєю віссю повороту паралельно поздовжньої осі корабля і перпендикулярно вертикальної осі корабля, забезпечити підвищення стабілізації/стійкості корабля при кільовій хитавиці. Суть корисної моделі в системі забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що містить цистерни, розташовані всередині корпусу корабля по його довжині від носової до кормової частин, зв'язані між собою трубопроводами, перекачувальні насоси, блок керування, ЕОМ та датчик хитавиці корабля, при цьому блок керування зв'язаний зворотним зв'язком з ЕОМ, датчик хитавиці з'єднаний з ЕОМ, ЕОМ зв'язана каналами керування з перекачувальними насосами, перекачувальний насос встановлено в магістралі нагнітання, що являє собою трубопровід між парою сусідніх баків, причому цистерни заповнено водою не менше, ніж наполовину, полягає в тому, що до складу системи додатково введено активний стабілізатор хитавиці та виконавчий механізм керування активним стабілізатором хитавиці. Суть корисної моделі полягає і в тому, що активний стабілізатор хитавиці закріплено шарнірно до зовнішньої поверхні корпусу корабля по торцю кормової частини корабля у вузлі повороту та з'єднано з виконавчим механізмом, виконавчий механізм керування активним стабілізатором хитавиці з'єднано з ЕОМ, активний стабілізатор хитавиці закріплено вісесиметрично поздовжній осі корабля, активний стабілізатор хитавиці закріплено у вузлі 1 UA 103608 U 5 10 15 20 25 30 35 40 45 50 55 повороту з можливістю його відхилення вверх/вниз на кут не менше 60° відносно осі повороту, що проходить по вузлах повороту, вісь повороту активного стабілізатора хитавиці розміщено паралельно поперечній осі корабля та перпендикулярно поздовжній осі корабля, вісь повороту активного стабілізатора хитавиці розміщено нижче ватерлінії корабля на відстані, при якій задня кромка активного стабілізатора хитавиці знаходиться у воді при його відхиленні відносно осі повороту на максимальний кут вверх. Суть корисної моделі полягає також в тому, що активний стабілізатор хитавиці виконано довжиною не більше ширини кормової частини корабля і шириною не менше 1/4 довжини зазначеного активного стабілізатора хитавиці, активний стабілізатор хитавиці виконано прямокутної або трапецеподібної форми в плані зі звуженням бічних сторін у бік вільного торця зазначеного активного стабілізатора хитавиці, зазначений активний стабілізатор хитавиці виконано плоскої форми або аеродинамічної форми із симетричним профілем у поперечному перерізі. Новим в корисній моделі є те, що активний стабілізатор хитавиці розміщено над гвинтами корабля на відстані, при якій задня кромка активного стабілізатора хитавиці перекриває струмінь потоку води, що відкидається гвинтами, при його відхиленні відносно осі повороту на максимальний кут вниз. Порівняльний аналіз технічного рішення з прототипом дозволяє зробити висновок, що система забезпечення стабілізації/стійкості корабля при кільовій хитавиці, яка заявляється, відрізняється тим, що до складу системи додатково введено активний стабілізатор хитавиці та виконавчий механізм керування активним стабілізатором хитавиці, активний стабілізатор хитавиці закріплено шарнірно до зовнішньої поверхні корпусу корабля по торцю кормової частини корабля у вузлі повороту та з'єднано з виконавчим механізмом, виконавчий механізм керування активним стабілізатором хитавиці з'єднано з ЕОМ, активний стабілізатор хитавиці закріплено вісесиметрично поздовжній осі корабля, активний стабілізатор хитавиці закріплено у вузлі повороту з можливістю його відхилення вверх/вниз на кут не менше 60° відносно осі повороту, що проходить по вузлах повороту, вісь повороту активного стабілізатора хитавиці розміщено паралельно поперечній осі корабля та перпендикулярно поздовжній осі корабля, вісь повороту активного стабілізатора хитавиці розміщено нижче ватерлінії корабля на відстані, при якій задня кромка активного стабілізатора хитавиці знаходиться у воді при його відхиленні відносно осі повороту на максимальний кут вверх, активний стабілізатор хитавиці виконано довжиною не більше ширини кормової частини корабля і шириною не менше 1/4 довжини зазначеного активного стабілізатора хитавиці, активний стабілізатор хитавиці виконано прямокутної або трапецеподібної форми в плані зі звуженням бічних сторін у бік вільного торця зазначеного активного стабілізатора хитавиці, активний стабілізатор хитавиці виконано плоскої форми або аеродинамічної форми із симетричним профілем у поперечному перерізі, активний стабілізатор хитавиці розміщено над гвинтами корабля на відстані, при якій задня кромка активного стабілізатора хитавиці перекриває струмінь потоку води, що відкидається гвинтами, при його відхиленні відносно осі повороту на максимальний кут вниз. Суть корисної моделі пояснюється за допомогою креслень, де на Фіг. 1 показано конструктивно-компонувальну схему системи забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, на Фіг. 2 показано схему розміщення активного стабілізатора хитавиці на кормовій частині корабля (на вигляді зверху), на Фіг. 3 показано схему розміщення 3 активного стабілізатора хитавиці на кормовій частині корабля (на вигляді /4 збоку), на Фіг. 4-9 показано варіанти конструктивного виконання активного стабілізатора хитавиці, на Фіг. 10 показано схему розміщення активного стабілізатора хитавиці на кормовій частині корабля відносно поздовжньої осі корабля, на Фіг. 11 показано схему розміщення вузлів повороту на кормовій частині корабля (на вигляді зверху), на Фіг. 12 показано схему відхилення активного стабілізатора хитавиці вверх/вниз на кут β не менше 60° відносно осі повороту, що проходить по вузлах повороту, на Фіг. 13 показано схему розміщення активного стабілізатора хитавиці над гвинтами корабля та його відхилення вверх/вниз на кут β, на Фіг. 14 показано схему розміщення осі повороту активного стабілізатора паралельно поперечній осі корабля та перпендикулярно поздовжній осі зазначеного корабля, на Фіг. 15 показано схему розміщення осі повороту активного стабілізатора хитавиці нижче ватерлінії корабля на відстані , при якій задня кромка активного стабілізатора хитавиці знаходиться у воді при його відхиленні відносно осі повороту на максимальний кут β повороту вверх, на Фіг. 16 показано блок-схему системи забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, на Фіг. 17 показано схему реалізації відповідного поздовжнього кута диференту корабля (судна) при його русі по схвильованій водній поверхні за рахунок зміни його центрування за допомогою активного стабілізатора хитавиці. 2 UA 103608 U 5 10 15 20 25 30 35 40 45 50 55 60 Хвилювання моря й виникаюча внаслідок цього кільова хитавиця корабля призводять до ряду шкідливих наслідків, основними з яких є наступні: поява додаткових навантажень на корпус корабля й на окремі його конструкції; заливання палуби водою через заривання носовою частиною корабля під поверхню хвилі; погіршення умов експлуатації різних приладів, пристроїв, систем і механізмів; погіршення керованості корабля; втрата швидкості ходу корабля через зростання опору корпуса при хитавиці, погіршення умов роботи рушіїв і збільшення нишпорення корабля; погіршення умов життєдіяльності для екіпажа (і пасажирів) та зниження ступеня комфорту для екіпажа (і пасажирів) корабля; зниження ефективності застосовування артилерійського озброєння корабля щодо прицільної стрільби [5]. Система 1 забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, містить (як варіант конструктивного виконання) цистерни 2, розташовані всередині корпусу 3 корабля 4 по його довжині від носової 5 до кормової 6 частин, трубопроводи 7 (що з'єднують цистерни 2 між собою), перекачувальні насоси 8, блок керування 9, ЕОМ 10, датчик 11 хитавиці корабля, активний стабілізатор 12 хитавиці та виконавчий механізм 13 керування активним стабілізатором хитавиці (див. схему на Фіг. 1). Конструктивно активний стабілізатор 12 хитавиці виконано: довжиною l не більше ширини L кормової частини 6 корабля 4 (див. схеми на Фіг. 2-5); 1 шириною b не менше /4 довжини l зазначеного активного стабілізатора 12 хитавиці (див. схеми на Фіг. 1-10); прямокутної (див. схеми на Фіг. 4, 7, 9) або трапецеподібної форми в плані зі звуженням бічних сторін 14 у бік вільного торця 15 (див. схему на Фіг. 5) зазначеного активного стабілізатора 12 хитавиці; плоскої форми (див. схеми на Фіг. 6-7) (або аеродинамічної форми із симетричним профілем у поперечному перерізі - див. схеми на Фіг. 1, 8-9, 12-13,15). Конструктивно і технологічно складові частини (відповідно, позиції 2, 7-13) системи 1 забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, розміщено на кораблі 4 таким чином: перекачувальний насос 8 встановлено в магістралі нагнітання, що являє собою трубопровід 7 між парою сусідніх баків 2 (див. схему на Фіг. 1), активний стабілізатор 12 хитавиці закріплено шарнірно до зовнішньої поверхні 16 корпусу 3 корабля 4 по торцю 17 кормової частини 6 корабля 4 у вузлі 18 повороту (див. схеми на Фіг. 13,10,12-13,14-15), активний стабілізатор 12 хитавиці закріплено вісесиметрично поздовжній осі 19 корабля 4 (див. схеми на Фіг. 1-14), активний стабілізатор 12 хитавиці закріплено у вузлі 18 повороту з можливістю його відхилення вверх/вниз на кут β не менше 60° відносно осі 20 повороту, що проходить по вузлах повороту 18 (див. схему на Фіг. 12), активний стабілізатор 12 хитавиці розміщено над гвинтами 21 корабля 4 на відстані h, при якій задня кромка 15 активного стабілізатора 12 хитавиці перекриває струмінь 22 потоку води, що відкидається гвинтами 21, при його відхиленні відносно осі 20 повороту) на максимальний кут β повороту вниз (див. схему на Фіг. 13). вісь 20 повороту активного стабілізатора 12 хитавиці розміщено паралельно поперечній осі 23 корабля 4 та перпендикулярно поздовжній осі 19 зазначеного корабля 4 (див. схему на Фіг. 14), вісь 20 повороту активного стабілізатора 12 хитавиці розміщено нижче ватерлінії 24 корабля 4 на відстані , при якій задня кромка 15 активного стабілізатора 12 хитавиці знаходиться у воді при його відхиленні відносно осі 20 повороту на максимальний кут β повороту вверх (див. схему на Фіг. 15). Конструктивно і технологічно складові частини (відповідно, позиції 2, 7-13) системи 1 забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, з'єднані між собою таким чином (див. схему на Фіг. 1 та блок-схему на Фіг. 16): блок 9 керування зв'язаний зворотним зв'язком 25 з ЕОМ 10, датчик 11 хитавиці з'єднаний інформаційним каналом 26 з ЕОМ 10, ЕОМ 10 зв'язана каналами керування 27 з перекачувальними насосами 8 (див. схему на Фіг. 1), активний стабілізатор 12 хитавиці з'єднано з виконавчим механізмом 13 (див. схему на Фіг. 1), 3 UA 103608 U 5 10 15 20 25 30 35 40 45 50 55 виконавчий механізм 13 керування активним стабілізатором хитавиці з'єднано командним каналом 28 керування з ЕОМ 10 (див. схему на Фіг. 1 та блок-схему на Фіг. 16). Цистерни 2, що розташовані всередині корпусу 3 корабля 4 по його довжині від носової 5 до кормової 6 частин, заповнено водою 29 не менше, ніж наполовину (див. схему на Фіг. 1). Система 1 забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, працює (для стабілізації/стійкості корабля при його русі по водній поверхні при кільовій хитавиці) таким чином. За допомогою блока 9 керування (який зв'язаний зворотним зв'язком 25 з ЕОМ 10) вводиться в роботу ЕОМ 10, яка починає відслідковувати роботу датчика 11 хитавиці (див. схему на Фіг. 1 та блок-схему на Фіг. 16). Датчик 11 хитавиці, що встановлений на кораблі 4, сприймає хитавицю корабля 4 в напрямку поздовжньої осі 18 корабля. 3 датчика 11 хитавиці сигнал по інформаційному каналу 26 надходить до ЕОМ 10. В ЕОМ 10 сигнал з датчика 11 хитавиці переробляється і каналами керування 27 подається на відповідні перекачувальні насоси 8. За допомогою перекачувальних насосів 8 вода 29 з цистерн 2 перекачується або в цистерни 2, що розташовані в носовій частині 5 корпусу 3 корабля 4, або навпаки, в цистерни 2, що розташовані в кормовій частині 6 корпусу 3 корабля 4. Зазначене забезпечує реалізацію відповідного поздовжнього кута диференту корабля (судна) при русі по схвильованій водній поверхні за рахунок зміни його центрування, який в залежності від ступеня хвилювання водної поверхні (висоти хвилі) змінюється, що змінює розподіл між складовими гідродинамічних сил (нормальної та поздовжньої) та значення поздовжнього моменту. В результаті зменшується опір на подолання хвиль (потрібна потужність двигуна), а тому і зменшується кільова хитавиця корабля (судна) до певного значення висоти хвиль, завдяки чому підвищується ефективність прицільної стрільби з артилерійського озброєння корабля. При цьому також покращуються розгінні характеристики корабля (судна). У випадку, коли перекачуванням води 29 по магістралях нагнітання (по трубопроводах 7) з цистерн 2, які розташовані в носовій частині 5 корпусу 3 корабля 4, в цистерни 2, що розташовані в кормовій частині 6 корпусу 3 корабля 4, та навпаки, не вдається знизити хитавицю корабля по його поздовжній осі 19, з блока 9 керування (який зв'язаний зворотним зв'язком 25 з ЕОМ 10) подається команда на ЕОМ 10 для введення зазначеною ЕОМ 10 в дію активного стабілізатора 12 хитавиці (який з'єднано з виконавчим механізмом 13) - див. схему на Фіг. 1 та блок-схему на Фіг. 16. У відповідності до сигналів з датчика 11 хитавиці, ЕОМ 10 відпрацьовує відповідні командні сигнали, які по командному каналу 28 керування подаються на виконавчий механізм 13 керування активним стабілізатором хитавиці (який з'єднано з активним стабілізатором 12 хитавиці, що закріплений у вузлах 18 повороту (які, у свою чергу, жорстко закріплені на зовнішньої поверхні 16 корпусу 3 корабля 4 по торцю 17 кормової частини 6 корабля 4)). Виконавчий механізм 13 керування активним стабілізатором хитавиці здійснює переміщення зазначеного активного стабілізатора 12 хитавиці (який занурено у воду і конструктивно знаходиться нижче ватерлінії 24 і вище гвинтів 21) вверх/вниз на кут не менше 60°, чим забезпечує додаткову стабілізацію/стійкість корабля при кільовій хитавиці при перекачуванні води між цистернами. Зазначена стабілізація (для корабля військового призначення) забезпечить: - підвищення ефективності прицільної стрільби з артилерійського озброєння корабля, - покращення розгінних характеристик корабля (для кораблів спеціального призначення), - зменшення навантажень на корпус корабля й на окремі його конструкції. Підвищення ефективності застосування системи забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що заявляється, у порівнянні з прототипом, досягається шляхом додаткової зміни центрування корабля (судна) спеціальним обладнанням, яке виконано у вигляді керуючої поверхні, введенням системи автоматичного керування за допомогою спеціальної керуючої поверхні за кормовим зрізом корабля (судна) під ватерлінією з використанням при цьому певного закону керування нею, в результаті чого забезпечується зменшення кільової хитавиці, що призводить у сумарному ефекті до підвищення ефективності прицільної стрільби артилерійським озброєнням кораблів, крім того, покращуються розгінні характеристики корабля (судна). Реалізація запропонованого підходу забезпечує оптимізувати характеристики силової установки та забезпечити необхідні часові та швидкісні і морехідні характеристики з силовою установкою меншої потужності (вагою, вартістю та ін.) або розширити діапазон морехідних характеристик при наявної потужності або збільшити корисне навантаження (запас засобів ураження тощо). 60 4 UA 103608 U 5 10 ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Крылов А.Н. Качка корабля // Энциклопедический словарь Брокгауза и Ефрона: В 86 томах (82 т. И 4 доп.). - СПб., - С. 1890-1907. 2. Шмырев А.Н. Успокоители качки судов. Л., Судостроение, 1972 г. 3. Дмитриев В.И. Советское подводное кораблестроение. М.: Воениздат, 1990. - 288 с. аналог. 4. Семенов-Тян-Шанский В.В., Благовещенский С.Н., Холодилин А.Н. "Качка корабля", Учебник для ВУЗов, Транспорт, - М.: 400 с. Глава восьмая. Успокоители качки. § 47. Активные гидродинамические успокоители качки. § 48. Успокоительные цистерны. § 49. Успокоители продольной качки - прототип. 5. EdwART. Толковый Военно-морской Словарь, 2010. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 1. Система забезпечення стабілізації/стійкості корабля при кільовій хитавиці, що містить цистерни, розташовані всередині корпусу корабля по його довжині від носової до кормової частин, зв'язані між собою трубопроводами, перекачувальні насоси, блок керування, ЕОМ та датчик хитавиці корабля, при цьому блок керування зв'язаний зворотним зв'язком з ЕОМ, датчик хитавиці з'єднаний з ЕОМ, ЕОМ зв'язана каналами керування з перекачувальними насосами, перекачувальний насос встановлено в магістралі нагнітання, що являє собою трубопровід між парою сусідніх баків, причому цистерни заповнено водою не менше, ніж наполовину, яка відрізняється тим, що до складу системи додатково введено активний стабілізатор хитавиці та виконавчий механізм керування активним стабілізатором хитавиці, при цьому активний стабілізатор хитавиці закріплено шарнірно до зовнішньої поверхні корпусу корабля по торцю кормової частини корабля у вузлі повороту та з'єднано з виконавчим механізмом, виконавчий механізм керування активним стабілізатором хитавиці з'єднано з ЕОМ, активний стабілізатор хитавиці закріплено вісесиметрично поздовжній осі корабля, активний стабілізатор хитавиці закріплено у вузлі повороту з можливістю його відхилення вверх/вниз на кут не менше 60° відносно осі повороту, що проходить по вузлах повороту, вісь повороту активного стабілізатора хитавиці розміщено паралельно поперечній осі корабля та перпендикулярно поздовжній осі корабля, вісь повороту активного стабілізатора хитавиці розміщено нижче ватерлінії корабля на відстані, при якій задня кромка активного стабілізатора хитавиці знаходиться у воді при його відхиленні відносно осі повороту на максимальний кут вверх. 2. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці виконано довжиною не більше ширини кормової частини корабля і шириною не менше 1/4 довжини зазначеного активного стабілізатора хитавиці. 3. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці виконано прямокутної або трапецеподібної форми в плані зі звуженням бічних сторін у бік вільного торця зазначеного активного стабілізатора хитавиці. 4. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці виконано плоскої форми або аеродинамічної форми із симетричним профілем у поперечному перерізі. 5. Система за п. 1, яка відрізняється тим, що активний стабілізатор хитавиці розміщено над гвинтами корабля на відстані, при якій задня кромка активного стабілізатора хитавиці перекриває струмінь потоку води, що відкидається гвинтами, при його відхиленні відносно осі повороту на максимальний кут вниз. 5 UA 103608 U 6 UA 103608 U 7 UA 103608 U 8 UA 103608 U 9 UA 103608 U 10 UA 103608 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B63B 39/00, B63B 39/06, B63B 1/16, B63H 1/00
Мітки: кільовій, корабля, забезпечення, хитавиці, система
Код посилання
<a href="https://ua.patents.su/13-103608-sistema-zabezpechennya-stabilizaci-stijjkosti-korablya-pri-kilovijj-khitavici.html" target="_blank" rel="follow" title="База патентів України">Система забезпечення стабілізації/стійкості корабля при кільовій хитавиці</a>
Заспокоювач хитавиці судна
Номер патенту: 69930
Опубліковано: 15.09.2004
Автори: Чорний Анатолій Петрович, Казакевіч Андрей В'ячеслав, Хільський В'ячеслав Петрович
МПК: B63B 39/00
Мітки: хитавиці, заспокоювач, судна
Формула / Реферат:
1. Заспокоювач хитавиці судна, що має пера, які одною стороною жорстко закріплені до бортів судна, який відрізняється тим, що його пера виконані у вигляді горизонтальних пластин, які розташовані нижче підошви найбільших ймовірних хвиль у носовій та кормовій частинах корпусу, і мають ширину, що не виходить за ширину палуби судна, або у вигляді скулових кілів, які розташовані на скулах корпусу по довжині судна постійного перерізу, і мають...
Радіолокаційна станція комплексної системи захисту корабля
Номер патенту: 83795
Опубліковано: 25.09.2013
Автори: Гузь Володимир Іванович, Стецюк Володимир Леонтійович, Ліпатов Валерій Павлович, Піронер Ян Михайлович, Долеско Анатолій Олександрович
МПК: G01S 13/04
Мітки: корабля, станція, радіолокаційна, комплексної, захисту, системі
Формула / Реферат:
Радіолокаційна станція комплексної системи захисту корабля, що містить антенний пост з антеною, пульт оператора та розподільний щит, при цьому до складу антенного поста входять антенна система, передавач, надвисокочастотний приймач, підсилювач проміжної частоти та модуль процесорів, до складу пульта оператора входять панельний комп'ютер пульта оператора, що містить з'єднані між собою монітор пульта оператора РЛС та процесор керування і...
Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля
Номер патенту: 83797
Опубліковано: 25.09.2013
Автори: Долеско Анатолій Олександрович, Стецюк Володимир Леонтійович, Баранчук Олександр Іванович, Ліпатов Валерій Павлович, Піронер Ян Михайлович, Гузь Володимир Іванович
МПК: H01Q 1/34
Мітки: корабля, станції, системі, захисту, комплексної, керування, радіолокаційної, положенням, пристрій, антени
Формула / Реферат:
Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля, що містить приймально-передавальну антену з електронною апаратурою радіолокаційної станції, які з'єднані високочастотним хвилевідним трактом з багатоканальними обертовим та поворотними зчленуваннями, та приводи повороту та обертання, причому зазначені приводи містять електродвигуни з механічними передачами, редукторами та обмежуючими упорами,...
Спосіб забезпечення стійкості руху колісної машини
Номер патенту: 24482
Опубліковано: 10.07.2007
Автори: Подригало Михайло Абович, Волков Володимир Петрович, Доброгорский Максим Васильович, Гриненко Михайло Миколайович
МПК: B60W 10/00
Мітки: забезпечення, колісної, стійкості, спосіб, руху, машини
Формула / Реферат:
Спосіб забезпечення стійкості руху колісної машини, що включає регулювання гальмівного моменту на її колесах, який відрізняється тим, що попередньо визначають величину дестабілізуючого моменту Мдес, потім стабілізуючого Mстаб, порівнюють зазначені величини моментів і, використовуючи показники гальмівних моментів на кожному колесі, регулюють Mстаб доти, поки різниця Мдес-Mстаб не буде дорівнювати нулю.
Спосіб рятування пілотованого космічного корабля з аварійної ракети-носія
Номер патенту: 20362
Опубліковано: 15.01.2007
Автори: Кулігін Анатолій Михайлович, Шашин Микола Митрофанович, Зиков Микола Єфимович, Мокін Олександр Васильович, Мокін Андрій Олександрович, Морозов Олег Дмитрович
МПК: B64G 1/00, F42B 15/00
Мітки: пілотованого, спосіб, аварійної, рятування, корабля, космічного, ракети-носія
Формула / Реферат:
Спосіб рятування пілотованого космічного корабля з аварійної ракети-носія, що включає відділення пілотованого космічного корабля від ракети-носія при працюючій маршовій рушійній установці ракети-носія, яка рухається з кутом атаки, і запускання рушійної установки системи аварійного рятування пілотованого космічного корабля, який відрізняється тим, що перед відділенням пілотованого космічного корабля вимикають маршову рушійну установку...
Попередній патент: Водогрійний котел
Наступний патент: Спосіб виробництва коньяку
Випадковий патент: Штам salmonella typhimurium b для виготовлення вакцин і діагностичних препаратів