Полярний кран
Формула / Реферат
1. Полярний кран, що містить розміщений над герметичною оболонкою реактора міст з ходовими візками, вантажний візок із змонтованим на ньому механізмом підйому вантажів, електроприводи механізмів головного підйому вантажу, пересування моста і візків з відповідними електродвигунами, електричні кабелі полярного крана з кабельним коробом, що виводить останні в центральну точку купола перекриття, систему керування та круговий підкрановий шлях з монорейкою і з механізмами регулювання геометрії останнього в радіальному та вертикальному напрямках, який відрізняється тим, що кожний електродвигун електроприводів механізмів головного підйому вантажу, пересування моста і візків додатково забезпечений датчиком швидкості, виконавчий орган якого механічно зв'язаний з валом відповідного електродвигуна, при цьому барабани канатів механізмів головного підйому вантажу додатково забезпечені датчиком кількості оборотів барабана каната, виконавчий орган якого механічно зв'язаний з валом відповідного барабана каната, крім того кожний із механізмів підйому вантажів додатково забезпечений датчиком для вимірювання ваги, а паралельно працюючі механізми підйому контейнера з паливом забезпечені датчиком тросового компенсатора, причому всі ці датчики об'єднані в систему моніторингу, що виконана з можливістю зв'язку з системою керування полярним краном.
2. Полярний кран за п. 1, який відрізняється тим, що кожний датчик швидкості встановлений на відповідному електродвигуні електроприводів механізмів головного підйому вантажу, пересування моста, за допомогою фрикційної муфти та адаптера, що механічно зв'язаний з останньою з одного боку та з валом електродвигуна з іншого боку, а кожний датчик кількості оборотів барабана каната встановлений на відповідному валу барабана каната механізмів головного підйому вантажу за допомогою фрикційної муфти та адаптера, що механічно зв'язаний з останньою з одного боку та з валом барабана каната з іншого боку.
Текст
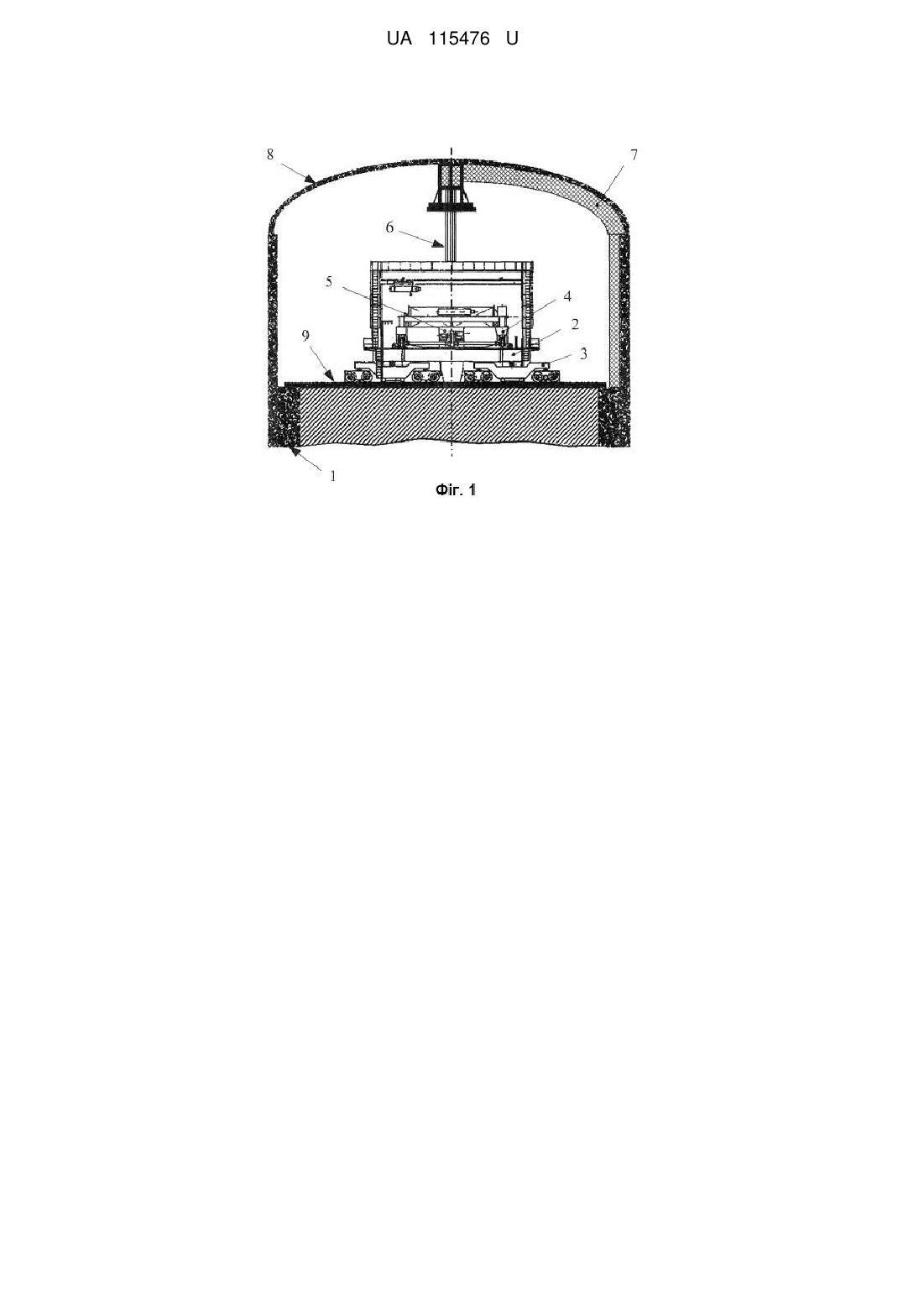
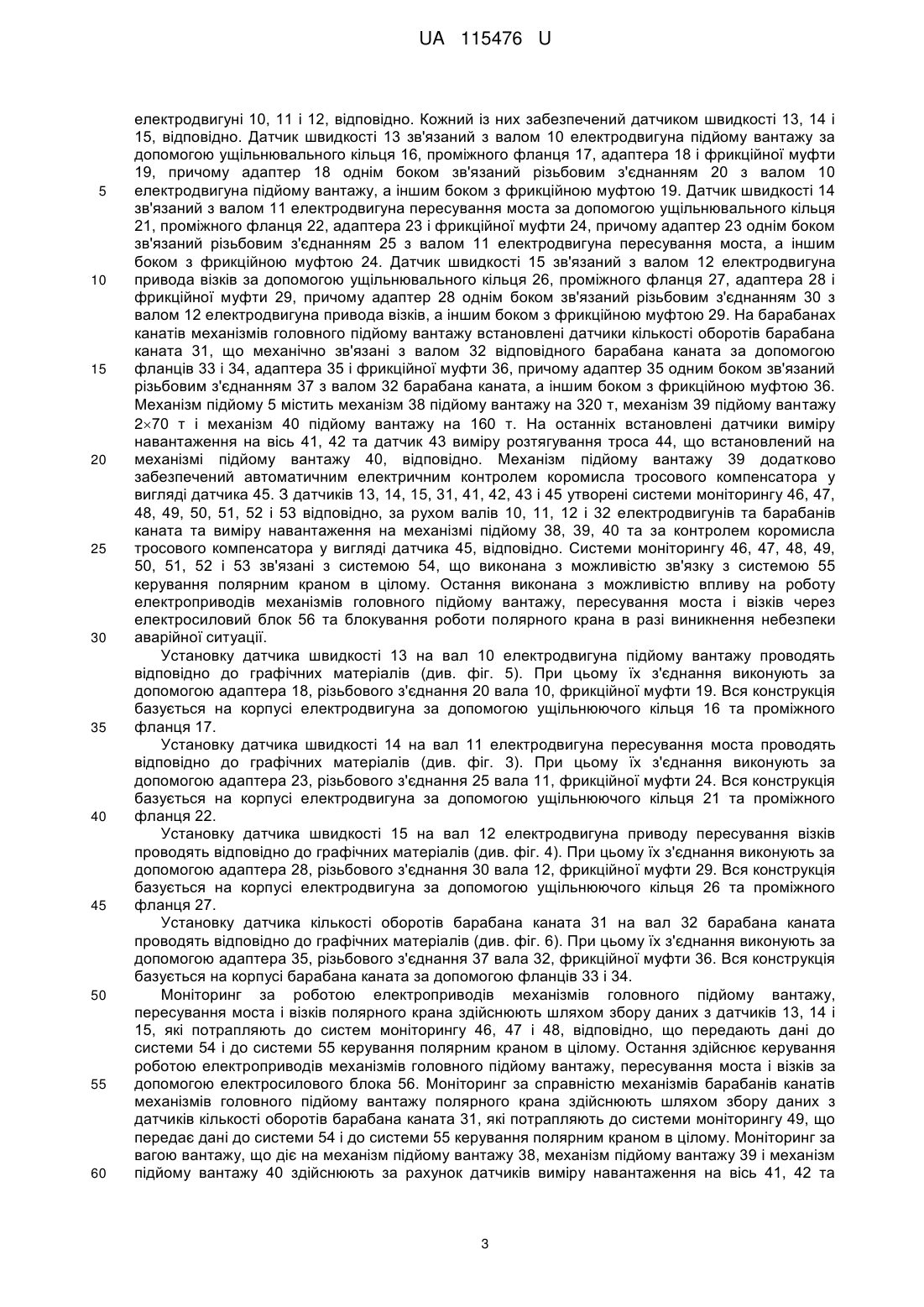
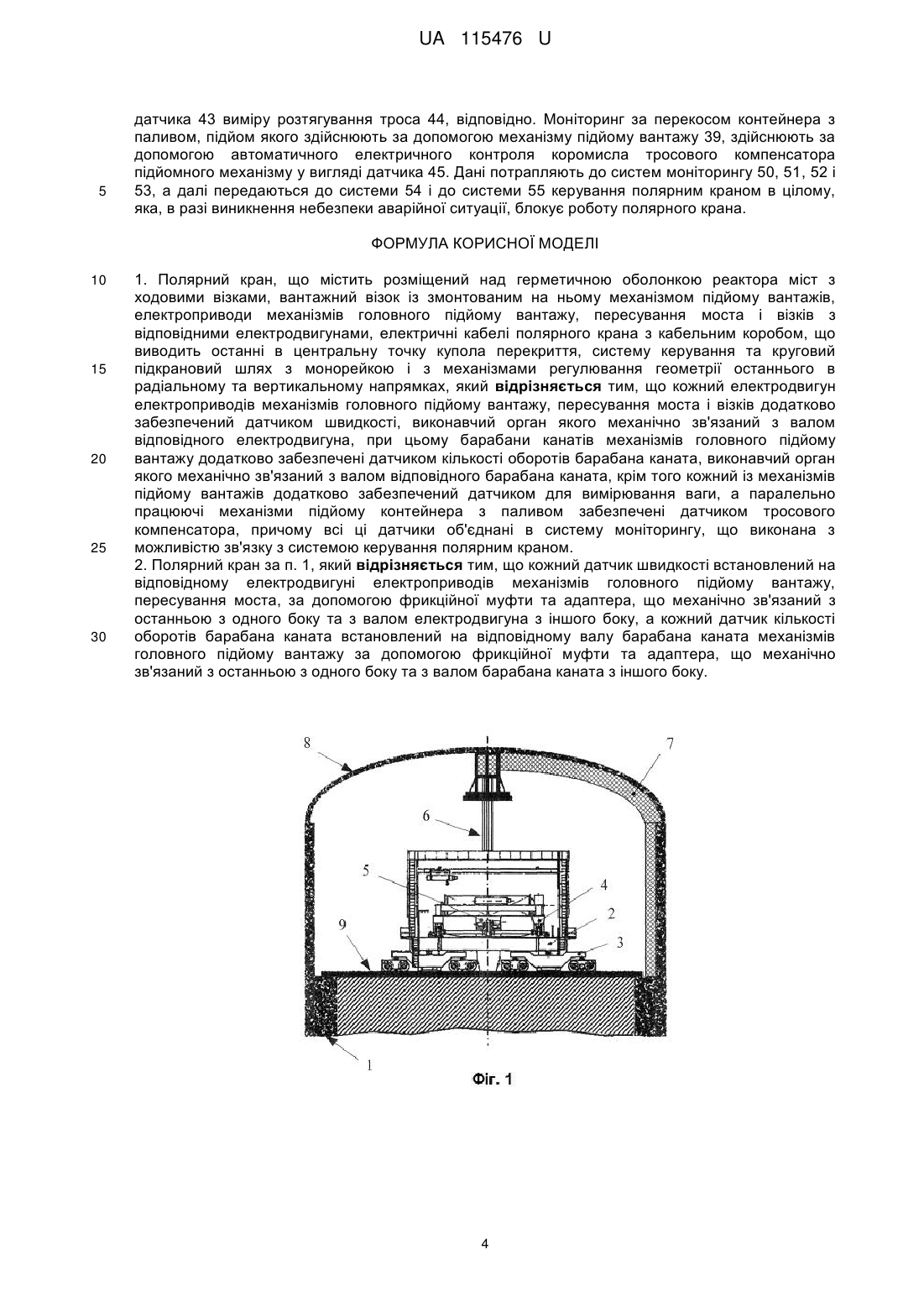
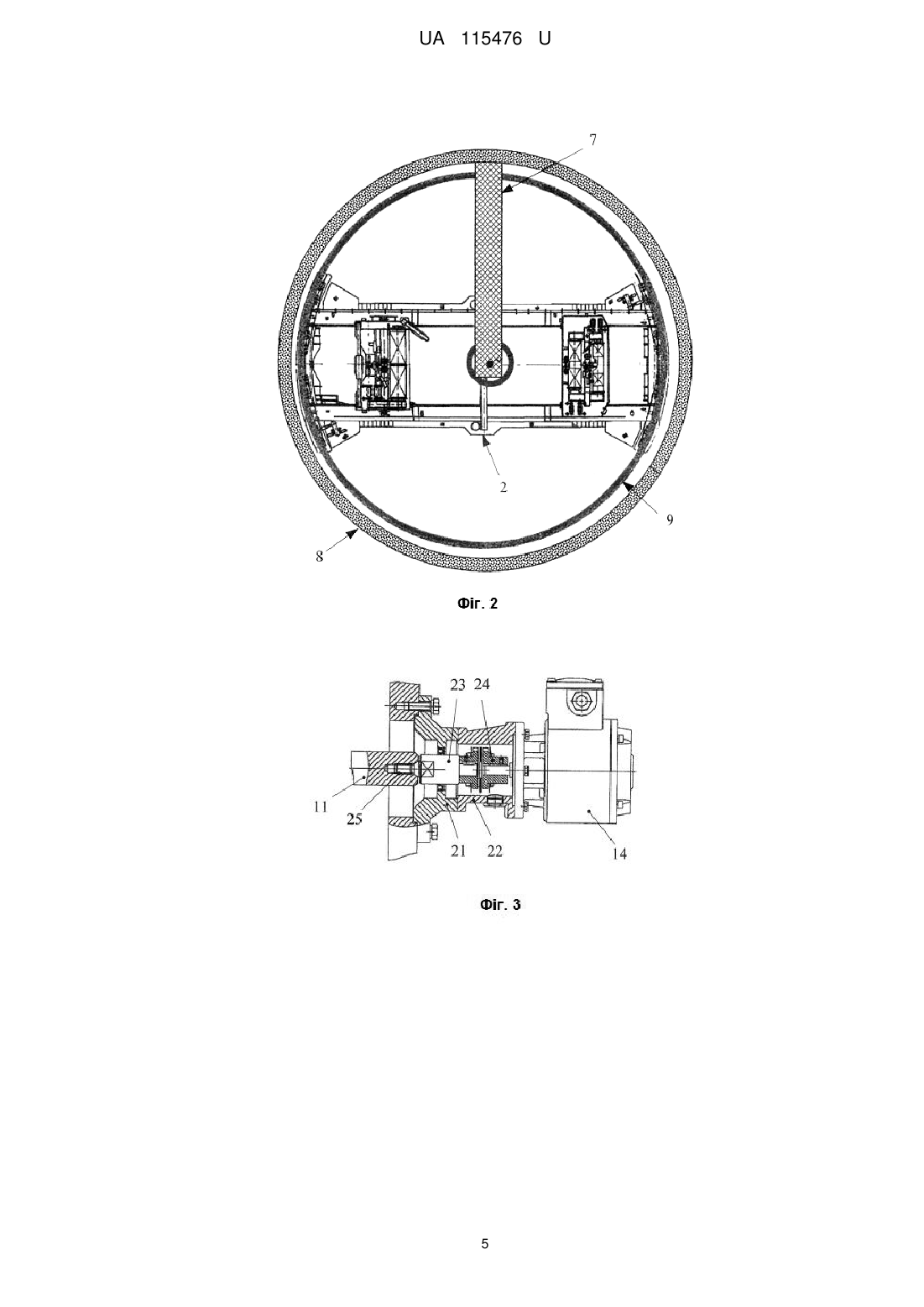
Реферат: UA 115476 U UA 115476 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель стосується підйомно-транспортного обладнання, а саме спеціальних мостових кранів кругової дії, які працюють в інженерних спорудах, що мають циліндричну форму типу реакторних відділень на атомних електростанціях, зокрема під куполом реакторного відділення атомної електростанції з реакторами типу ВВР. Відомий мостовий кран опорний електричний кругової дії, переважно для установки в реакторному відділенні блока атомної електростанції, що містить дві прогонові балки, жорстко з'єднані з ними дві кінцеві балки, які спираються на ходові візки, головний і допоміжний вантажні візки, встановлені з можливістю переміщення уздовж прогонових балок крана, на рамах яких змонтовані відповідно механізми головного і допоміжного підйому вантажу з електроприводами, жорстко прикріплений до прогонових балок портал з електроталлю, яка встановлена з можливістю переміщення уздовж верхньої платформи порталу, і два додаткові механізми підйому вантажу, змонтовані на головному і допоміжному вантажних візках, причому він забезпечений закріпленими на кожній пролітній балці і на кожній бічній стороні головного вантажного візка по два L-подібних антисейсмічних підхватів, виконаних з можливістю взаємодії їх горизонтальних полиць відповідно з підкрановими шляхами і з пролітними балками, приводами ручного дублювання механізмів головного підйому, пересування моста і візків, буферами, змонтованими на вертикальних полицях підхватів головного вантажного візка, і упорами, закріпленими на прогонових балках крана з можливістю взаємодії з ними зазначених буферів, при цьому рама допоміжного вантажного візка однією стороною за допомогою двох осьових шарнірів спирається на раму головною вантажного візка, а іншою стороною - на ходові колеса (див. патент Російської Федерації на корисну модель № 62101, МПК В 66С 17/06, 2007 p.). Однак, в даній конструкції мостового крана кругової дії реалізована конструкція електродвигунів, що не передбачає точного моніторингу за переміщенням виконавчих механізмів крана в просторі реакторного залу за рахунок аналізу системою керування краном кількості оборотів роторів електродвигунів, що відповідають за ці переміщення. Крім того, не забезпечується моніторинг за справністю з'єднань в приводах механізмів головного підйому вантажу, за вагою вантажу, що діє на механізми підйому вантажу. Також не здійснюється контроль за кутом нахилу контейнера з паливом, який потрібно проводити регулярно в зв'язку з тим, що троси в процесі експлуатації крана можуть нерівномірно розтягуватись. Задачею створення даної корисної моделі є створення полярного крана, що забезпечить моніторинг за переміщенням виконавчих механізмів крана в просторі реакторного залу та їх навантаженням у відповідності з вимогами МАРАТЕ за рахунок створення можливості моніторингу та аналізу системою керування полярним краном кількості оборотів роторів електродвигунів, що відповідають за ці переміщення, моніторингу за справністю з'єднань в приводах механізмів головного підйому вантажу, моніторингу за вагою вантажу, що діє на механізми підйому вантажу, та за кутом нахилу контейнера з паливом. Поставлена задача вирішується за рахунок того, що в полярному крані, що містить розміщений над герметичною оболонкою реактора міст з ходовими візками, вантажний візок із змонтованим на ньому механізмом підйому вантажів, електроприводи механізмів головного підйому вантажу, пересування моста і візків з відповідними електродвигунами, електричні кабелі полярного крана з кабельним коробом, що виводить останні в центральну точку купола перекриття, систему керування та круговий підкрановий шлях з монорейкою і з механізмами регулювання геометрії останнього в радіальному та вертикальному напрямках, відповідно до корисної моделі кожний електродвигун електроприводів механізмів головного підйому вантажу, пересування моста і візків додатково забезпечений датчиком швидкості, виконавчий орган якого механічно зв'язаний з валом відповідного електродвигуна, при цьому барабани канатів механізмів головного підйому вантажу додатково забезпечені датчиком кількості оборотів барабана каната, виконавчий орган якого механічно зв'язаний з валом відповідного барабана каната, крім того кожний із механізмів підйому вантажів додатково забезпечений датчиком для вимірювання ваги, а паралельно працюючі механізми підйому контейнера з паливом забезпечені датчиком тросового компенсатора, причому всі ці датчики об'єднані в систему моніторингу, що виконана з можливістю зв'язку з системою керування полярним краном. Крім того, кожний датчик швидкості може бути встановлений на відповідному електродвигуні електроприводів механізмів головного підйому вантажу, пересування моста, за допомогою фрикційної муфти та адаптера, що механічно зв'язаний з останньою з одного боку та з валом електродвигуна з іншого боку, а кожний датчик кількості оборотів барабана каната може бути встановлений на відповідному валу барабана каната механізмів головного підйому вантажу за допомогою фрикційної муфти та адаптера, що механічно зв'язаний з останньою з одного боку та з валом барабана каната з іншого боку. 1 UA 115476 U 5 10 15 20 25 30 35 40 45 50 55 60 Додаткове забезпечення кожного електродвигуна електроприводів механізмів головного підйому вантажу, пересування моста і візків датчиком швидкості, виконавчий орган якого механічно зв'язаний з валом відповідного електродвигуна, при цьому додаткове забезпечення барабанів канатів механізмів головного підйому вантажу датчиком кількості оборотів барабана каната, виконавчий орган якого механічно зв'язаний з валом відповідного барабана каната, крім того додатково забезпечення кожного із механізмів підйому вантажів датчиком для вимірювання ваги, і забезпечення паралельно працюючих механізмів підйому контейнера з паливним датчиком тросового компенсатора, причому об'єднання всіх цих датчиків в систему моніторингу, що виконана з можливістю зв'язку з системою керування полярним краном, дозволяє забезпечити моніторинг за переміщенням та навантаженням виконавчих механізмів крана в просторі реакторного залу у відповідності з вимогами МАГАТЕ з техніки безпеки до функції системи управління краном за рахунок оснащення двигунів і механізмів в приводах головного підйому вантажу відносно недорогими додатковими датчиками і створення можливості на їх основі моніторингу та аналізу системою керування полярним краном кількості оборотів ротора електродвигуна, що відповідає за ці переміщення, та моніторингу за справністю з'єднань в приводах механізмів головного підйому вантажу, моніторингу за вагою вантажу, що діє на механізми підйому вантажу, та за кутом нахилу контейнера з паливом. Використання пропонованого полярного крана дозволяє забезпечити наступний технічний результат: - досягається можливість забезпечення електродвигунів полярного крана датчиками, що здатні проводити моніторинг за переміщенням виконавчих механізмів крана в просторі реакторного залу; - досягається можливість забезпечення приводів механізмів головного підйому вантажу полярного крана датчиками, що здатні розпізнати виникнення можливих поломок в цих механізмах; - досягається можливість забезпечення електродвигунів полярного крана системою моніторингу за переміщенням виконавчих механізмів крана в просторі реакторного залу та їх навантаженням у відповідності з вимогами МАГАТЕ з техніки безпеки до функції системи управління краном; - забезпечується можливість модернізації двигунів полярного крана в період його простою під час корисної роботи реакторного блока АЕС (виробництві електроенергії); - забезпечується можливість контролю за вагою вантажу, що діє на механізми підйому вантажу та оперативного реагування на ситуації, що виникають в процесі роботи; - забезпечується можливість здійснення регулярного контролю за кутом нахилу контейнера з паливом, який може виникати в зв'язку з тим, що троси в процесі експлуатації крана можуть нерівномірно розтягуватись. Крім того: - забезпечуються відносно низькі витрати на модернізацію полярного крана у відповідності з вимогами МАГ ATE з техніки безпеки до функції системи управління краном. - забезпечується можливість проведення модернізації полярного крана в реакторному залі АЕС; - з'являється можливість в подальшому використовувати як електроприводи механізми головного підйому вантажу, пересування моста і візків, двигуни постійного струму вітчизняних виробників. На фіг. 1 зображений полярний кран, вигляд збоку, на фіг.2 вигляд зверху на полярний кран, на фіг.3 - збільшене зображення вузла кріплення датчика швидкості на електродвигуні привода пересування моста; на фіг.4 - збільшене зображення вузла кріплення датчика швидкості на електродвигуні привода візків; на фіг. 5 - збільшене зображення вузла кріплення датчика швидкості на електродвигуні привода підйому вантажу; на фіг.6 - збільшене зображення вузла кріплення датчика кількості оборотів барабана каната на барабані каната механізмів головного підйому вантажу; на фіг. 7 - розміщення датчиків виміру навантаження на вісь, на фіг. 8 - розріз А-А на фіг. 7, на фіг. 9 - розріз Б-Б на фіг. 7, на фіг. 10 - контроль балансування трос-важеля, на фіг. 11 - збільшене зображення В на фіг. 11, фіг 12 - структурна схема інформаційної системи моніторингу за роботою механізмів головного підйому вантажу, пересування моста і візків. Полярний кран містить розміщений над герметичною оболонкою 1 реактора міст 2 з ходовими візками 3, вантажний візок 4 із змонтованим на ньому механізмом підйому вантажів 5, електроприводи механізмів головного підйому вантажу, пересування моста і візків, електричні кабелі 6 полярного крана з кабельним коробом 7, що виводить останні до купола перекриття 8, систему керування полярним краном та круговий підкрановий шлях з монорейкою 9. Електроприводи механізмів головного підйому вантажу, пересування моста і візків містять 2 UA 115476 U 5 10 15 20 25 30 35 40 45 50 55 60 електродвигуні 10, 11 і 12, відповідно. Кожний із них забезпечений датчиком швидкості 13, 14 і 15, відповідно. Датчик швидкості 13 зв'язаний з валом 10 електродвигуна підйому вантажу за допомогою ущільнювального кільця 16, проміжного фланця 17, адаптера 18 і фрикційної муфти 19, причому адаптер 18 однім боком зв'язаний різьбовим з'єднанням 20 з валом 10 електродвигуна підйому вантажу, а іншим боком з фрикційною муфтою 19. Датчик швидкості 14 зв'язаний з валом 11 електродвигуна пересування моста за допомогою ущільнювального кільця 21, проміжного фланця 22, адаптера 23 і фрикційної муфти 24, причому адаптер 23 однім боком зв'язаний різьбовим з'єднанням 25 з валом 11 електродвигуна пересування моста, а іншим боком з фрикційною муфтою 24. Датчик швидкості 15 зв'язаний з валом 12 електродвигуна привода візків за допомогою ущільнювального кільця 26, проміжного фланця 27, адаптера 28 і фрикційної муфти 29, причому адаптер 28 однім боком зв'язаний різьбовим з'єднанням 30 з валом 12 електродвигуна привода візків, а іншим боком з фрикційною муфтою 29. На барабанах канатів механізмів головного підйому вантажу встановлені датчики кількості оборотів барабана каната 31, що механічно зв'язані з валом 32 відповідного барабана каната за допомогою фланців 33 і 34, адаптера 35 і фрикційної муфти 36, причому адаптер 35 одним боком зв'язаний різьбовим з'єднанням 37 з валом 32 барабана каната, а іншим боком з фрикційною муфтою 36. Механізм підйому 5 містить механізм 38 підйому вантажу на 320 т, механізм 39 підйому вантажу 270 т і механізм 40 підйому вантажу на 160 т. На останніх встановлені датчики виміру навантаження на вісь 41, 42 та датчик 43 виміру розтягування троса 44, що встановлений на механізмі підйому вантажу 40, відповідно. Механізм підйому вантажу 39 додатково забезпечений автоматичним електричним контролем коромисла тросового компенсатора у вигляді датчика 45. З датчиків 13, 14, 15, 31, 41, 42, 43 і 45 утворені системи моніторингу 46, 47, 48, 49, 50, 51, 52 і 53 відповідно, за рухом валів 10, 11, 12 і 32 електродвигунів та барабанів каната та виміру навантаження на механізмі підйому 38, 39, 40 та за контролем коромисла тросового компенсатора у вигляді датчика 45, відповідно. Системи моніторингу 46, 47, 48, 49, 50, 51, 52 і 53 зв'язані з системою 54, що виконана з можливістю зв'язку з системою 55 керування полярним краном в цілому. Остання виконана з можливістю впливу на роботу електроприводів механізмів головного підйому вантажу, пересування моста і візків через електросиловий блок 56 та блокування роботи полярного крана в разі виникнення небезпеки аварійної ситуації. Установку датчика швидкості 13 на вал 10 електродвигуна підйому вантажу проводять відповідно до графічних матеріалів (див. фіг. 5). При цьому їх з'єднання виконують за допомогою адаптера 18, різьбового з'єднання 20 вала 10, фрикційної муфти 19. Вся конструкція базується на корпусі електродвигуна за допомогою ущільнюючого кільця 16 та проміжного фланця 17. Установку датчика швидкості 14 на вал 11 електродвигуна пересування моста проводять відповідно до графічних матеріалів (див. фіг. 3). При цьому їх з'єднання виконують за допомогою адаптера 23, різьбового з'єднання 25 вала 11, фрикційної муфти 24. Вся конструкція базується на корпусі електродвигуна за допомогою ущільнюючого кільця 21 та проміжного фланця 22. Установку датчика швидкості 15 на вал 12 електродвигуна приводу пересування візків проводять відповідно до графічних матеріалів (див. фіг. 4). При цьому їх з'єднання виконують за допомогою адаптера 28, різьбового з'єднання 30 вала 12, фрикційної муфти 29. Вся конструкція базується на корпусі електродвигуна за допомогою ущільнюючого кільця 26 та проміжного фланця 27. Установку датчика кількості оборотів барабана каната 31 на вал 32 барабана каната проводять відповідно до графічних матеріалів (див. фіг. 6). При цьому їх з'єднання виконують за допомогою адаптера 35, різьбового з'єднання 37 вала 32, фрикційної муфти 36. Вся конструкція базується на корпусі барабана каната за допомогою фланців 33 і 34. Моніторинг за роботою електроприводів механізмів головного підйому вантажу, пересування моста і візків полярного крана здійснюють шляхом збору даних з датчиків 13, 14 і 15, які потрапляють до систем моніторингу 46, 47 і 48, відповідно, що передають дані до системи 54 і до системи 55 керування полярним краном в цілому. Остання здійснює керування роботою електроприводів механізмів головного підйому вантажу, пересування моста і візків за допомогою електросилового блока 56. Моніторинг за справністю механізмів барабанів канатів механізмів головного підйому вантажу полярного крана здійснюють шляхом збору даних з датчиків кількості оборотів барабана каната 31, які потрапляють до системи моніторингу 49, що передає дані до системи 54 і до системи 55 керування полярним краном в цілому. Моніторинг за вагою вантажу, що діє на механізм підйому вантажу 38, механізм підйому вантажу 39 і механізм підйому вантажу 40 здійснюють за рахунок датчиків виміру навантаження на вісь 41, 42 та 3 UA 115476 U 5 датчика 43 виміру розтягування троса 44, відповідно. Моніторинг за перекосом контейнера з паливом, підйом якого здійснюють за допомогою механізму підйому вантажу 39, здійснюють за допомогою автоматичного електричного контроля коромисла тросового компенсатора підйомного механізму у вигляді датчика 45. Дані потрапляють до систем моніторингу 50, 51, 52 і 53, а далі передаються до системи 54 і до системи 55 керування полярним краном в цілому, яка, в разі виникнення небезпеки аварійної ситуації, блокує роботу полярного крана. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 1. Полярний кран, що містить розміщений над герметичною оболонкою реактора міст з ходовими візками, вантажний візок із змонтованим на ньому механізмом підйому вантажів, електроприводи механізмів головного підйому вантажу, пересування моста і візків з відповідними електродвигунами, електричні кабелі полярного крана з кабельним коробом, що виводить останні в центральну точку купола перекриття, систему керування та круговий підкрановий шлях з монорейкою і з механізмами регулювання геометрії останнього в радіальному та вертикальному напрямках, який відрізняється тим, що кожний електродвигун електроприводів механізмів головного підйому вантажу, пересування моста і візків додатково забезпечений датчиком швидкості, виконавчий орган якого механічно зв'язаний з валом відповідного електродвигуна, при цьому барабани канатів механізмів головного підйому вантажу додатково забезпечені датчиком кількості оборотів барабана каната, виконавчий орган якого механічно зв'язаний з валом відповідного барабана каната, крім того кожний із механізмів підйому вантажів додатково забезпечений датчиком для вимірювання ваги, а паралельно працюючі механізми підйому контейнера з паливом забезпечені датчиком тросового компенсатора, причому всі ці датчики об'єднані в систему моніторингу, що виконана з можливістю зв'язку з системою керування полярним краном. 2. Полярний кран за п. 1, який відрізняється тим, що кожний датчик швидкості встановлений на відповідному електродвигуні електроприводів механізмів головного підйому вантажу, пересування моста, за допомогою фрикційної муфти та адаптера, що механічно зв'язаний з останньою з одного боку та з валом електродвигуна з іншого боку, а кожний датчик кількості оборотів барабана каната встановлений на відповідному валу барабана каната механізмів головного підйому вантажу за допомогою фрикційної муфти та адаптера, що механічно зв'язаний з останньою з одного боку та з валом барабана каната з іншого боку. 4 UA 115476 U 5 UA 115476 U 6 UA 115476 U 7 UA 115476 U 8 UA 115476 U 9 UA 115476 U 10 UA 115476 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Автори російськоюTrezza Bianca
МПК / Мітки
МПК: B66C 17/06
Код посилання
<a href="https://ua.patents.su/13-115476-polyarnijj-kran.html" target="_blank" rel="follow" title="База патентів України">Полярний кран</a>
Баштовий кран
Номер патенту: 100083
Опубліковано: 12.11.2012
Автори: Шумілов Георгій Володимирович, Ловейкін Вячеслав Сергійович
МПК: B66C 23/16
Формула / Реферат:
Баштовий кран, що має механізм підйому вантажу, який містить приводний механізм підйому, барабан, вантажний канат, противагу, гакову підвіску та механізм зміни вильоту вантажу, що складається з тягового каната, вантажної каретки, приводного механізму вантажної каретки, який відрізняється тим, що противага через вантажний канат, барабан та муфту зв'язана з приводним механізмом підйому, а тяговий канат вантажної каретки запасований через...
Багатошвидкісний механізм піднімання крана мостового типу
Номер патенту: 41845
Опубліковано: 10.06.2009
Автори: Веремчук Інна Володимирівна, Скворцов Максим Миколайович, Кияшко Володимир Тимофійович
МПК: B66C 17/00
Мітки: типу, крана, піднімання, мостового, механізм, багатошвидкісний
Формула / Реферат:
Багатошвидкісний механізм підйому та опускання вантажу крана мостового типу, що містить привід, вантажний візок та канат, який відрізняється тим, що на кінцевих балках стаціонарно встановлені щонайменше два механізми піднімання та опускання вантажу, на барабанах яких закріплений канат, зв'язаний із вантажозахоплюючим пристроєм через напрямні ролики, встановлені на візках з індивідуальними механізмами пересування для зміни відстані між ними та...
Баштовий кран
Номер патенту: 53790
Опубліковано: 25.10.2010
Автори: Ловейкін Вячеслав Сергійович, Шумілов Георгій Володимирович
МПК: B66C 23/16
Формула / Реферат:
Баштовий кран, що містить башту, стрілу, противагову консоль, канат, противагу, механізм підйому та механізм пересування вантажної каретки, який відрізняється тим, що кран містить механізм підйому та механізм пересування вантажної каретки, які зв'язані канатами з відповідними противагами так, що при переміщенні, підйомі або опусканні вантажу відповідна противага рухається вздовж противагової консолі.
Портальний кран
Номер патенту: 60373
Опубліковано: 25.06.2011
Автори: Цьока Василь Васильович, Вовненко Геннадій Миколайович, Протиняк Ігор Стефанович, Вовненко Тетяна Борисівна
МПК: B66C 19/00
Мітки: портальний, кран
Формула / Реферат:
Портальний кран, що містить встановлений на підкрановий шлях портал з механізмом пересування, змонтовану на порталі поворотну колону та встановлені на ній стрілову систему, механізм зміни вильоту стріли, кабіну машиніста крана, машинне приміщення з механізмом підйому вантажу, який відрізняється тим, що стрілова система виконана у вигляді рухомо зчленованих між собою стріли, хобота і жорсткої відтяжки, при цьому оголовок стріли та оголовок...
Кран мостовий
Номер патенту: 26901
Опубліковано: 10.10.2007
Автори: Ісьєміні Ігор Ісаакович, Дядечко Віктор Олександрович, Дінігуб Сергій Анатолійович, Пивовар Павло Григорович, Наталіч Валерій Сергійович
МПК: B66C 17/00
Формула / Реферат:
1. Кран мостовий, що містить двобалкову пролітну споруду, з'єднану з кінцевими балками, що мають колеса для переміщення крана по кранових рейках і механізм підйому із крюковою підвіскою, при цьому кран оснащено елементами пристрою пересування струмопроводу і електроустаткуванням, який відрізняється тим, що пролітна споруда виконана у вигляді двофермової конструкції, з'єднаної поперечними стяжками і оснащеної їздовою двотавровою балкою,...
Попередній патент: Будівельна теплоізоляційна панель
Наступний патент: Твердопаливний водогрійний котел “пітра”
Випадковий патент: Спосіб ідентифікації друкованих об'єктів