Спосіб прицілювання
Номер патенту: 93037
Опубліковано: 10.09.2014
Автори: Туренко Сергій Михайлович, Альошин Олександр Михайлович, Архипов Микола Іванович, Черняк Сергій Іванович
Формула / Реферат
1. Спосіб прицілювання, який полягає в тому, що включають приціл, що містить відбивач, блок формування прицільної сітки та вузол ручного уведення кута прицілювання, виконують політ літального апарата в район цілі, оцінюють по приладах параметри польоту, проводять пошук цілі і її виявлення на навколишньому тлі місцевості, визначають дальність до цілі, визначають швидкість руху цілі, визначають, відповідно, для стрільби - кути прицілювання й кут упередження, а для бомбометання необхідне положення цілі для рішення задання прицілювання, пілотують літальний апарат так, щоб ціль на сітці відбивача прицілу зайняла положення, що відповідає, відповідно, для стрільби - кутам прицілювання й упередження, а для бомбометання - необхідному положенню цілі, приймають рішення щодо знаходження цілі в зоні дозволеної стрільби або точці бомбометання і виконують стрільбу/бомбометання, який відрізняється тим, що попередньо допрацьовують приціл літального апарата шляхом встановлення на ньому лазерного далекоміра, приймача супутникової навігаційної системи, телевізійного індикатора, мікропроцесора, малогабаритної електромеханічної інерційної системи й датчиків, після визначення кутів прицілювання й кута упередження відображають на відбивачі прицілу прицільні інформаційні параметри, отримані за допомогою додаткового устаткування й мікропроцесора, а при одержанні прицільних інформаційних параметрів, накладають перехрестя прицілу на ціль шляхом маневрування літальним апаратом у просторі, при цьому параметри польоту визначають шляхом прямих вимірів за допомогою супутникової навігаційної системи малогабаритної електромеханічної інерційної системи й лазерного далекоміра, а параметри польоту, які неможливо визначити за допомогою прямих вимірів - повітряну швидкість, швидкість вітру, кути тангажа та ковзання, визначають непрямим шляхом за інформацією з введених додаткових пристроїв та систем, причому на відбивачі прицілу відображають такі параметри, як необхідні координати цілі, відповідно, при стрільбі - кутове положення цілі відносно осі прицілу, діапазон дальності дозволеної стрільби, при бомбометанні - параметри прицілювання за напрямком та дальністю, а також необхідну службову інформацію, що стосується працездатності лазерного далекоміра та вузла супутникової навігаційної системи, і разові команди дозволу стрільби та бомбометання.
2. Спосіб за п. 1, який відрізняється тим, що параметри польоту власного літального апарата, дальність до цілі й швидкість руху цілі визначають, відповідно, за допомогою лазерного далекоміра, вузла супутникової навігаційної системи, малогабаритної електромеханічної інерційної системи, а задання прицілювання при стрільбі і/або бомбометанні вирішують автоматично за допомогою мікропроцесора.
3. Спосіб за п. 1, який відрізняється тим, що рішення про знаходження цілі в зоні дозволеної стрільби або точці бомбометання приймають на підставі прицільних інформаційних параметрів.
Текст
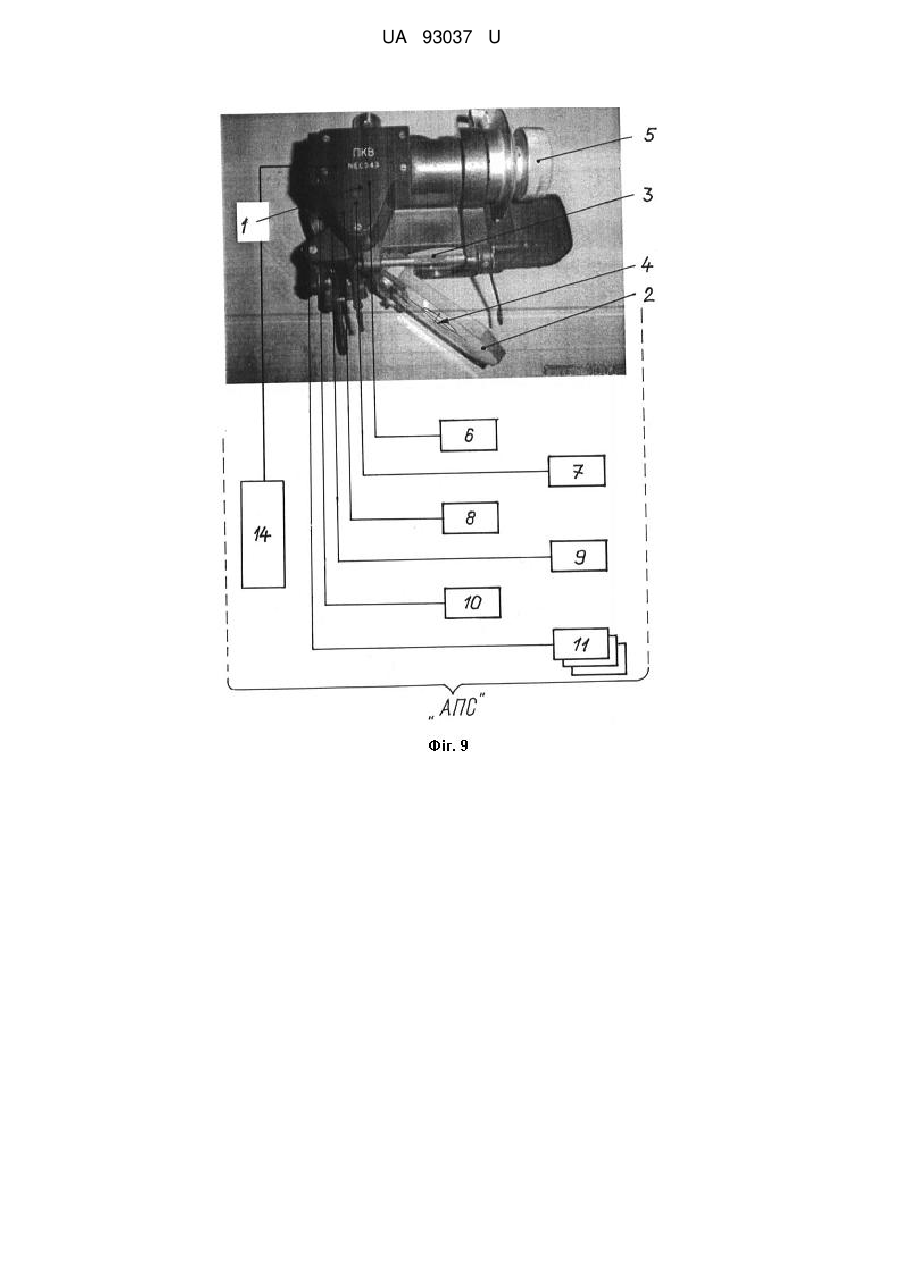
Реферат: Спосіб прицілювання, який полягає в тому, включають приціл, що містить відбивач, блок формування прицільної сітки та вузол ручного уведення кута прицілювання, виконують політ літального апарата в район цілі, оцінюють по приладах параметри польоту, проводять пошук цілі і її виявлення на навколишньому тлі місцевості, визначають дальність до цілі, визначають швидкість руху цілі, визначають відповідно, для стрільби - кути прицілювання й кут упередження, а для бомбометання необхідне положення цілі для рішення задання прицілювання, пілотують літальний апарат так, щоб ціль на сітці відбивача прицілу зайняла положення, що відповідає, відповідно, для стрільби - кутам прицілювання й упередження, а для бомбометання - необхідному положенню цілі, приймають рішення щодо знаходження цілі в зоні дозволеної стрільби або точці бомбометання і виконують стрільбу/бомбометання. Попередньо допрацьовують приціл літального апарата шляхом встановлення на ньому лазерного далекоміра, приймача супутникової навігаційної системи, телевізійного індикатора, мікропроцесора, малогабаритної електромеханічної інерційної системи й датчиків, після визначення кутів прицілювання й кута упередження відображають на відбивачі прицілу прицільні інформаційні параметри, отримані за допомогою додаткового устаткування й мікропроцесора. UA 93037 U (12) UA 93037 U UA 93037 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі озброєння, зокрема до авіаційних прицілів - авіаційних прицільних систем, а саме до способів прицілювання при стрільбі та бомбометанні по наземних цілях і може бути застосована для інформаційного забезпечення прицільних задавань стрільби по наземних цілях і бомбометання в оптичних прицілах стрільби і бомбометання, розміщених на літальних апаратах (літаках і вертольотах), на яких відсутня можливість використання дистанційних датчиків інформації, або на таких, де зазначені датчики взагалі відсутні. Специфіка застосування некерованих боєприпасів з літального апарата по наземних цілях полягає в тому, що для автоматизації вирішення завдання прицілювання необхідно одержувати і використовувати інформацію про координати і параметри руху літального апарата відносно земля і повітря, інформацію про координати і рух наземних цілей, а також інформацію про стан і рух повітряного середовища. Інформація про координати і параметри руху літального апарата відносно землі і повітря включають в себе: - лінійні координати літального апарата відносно землі, точки зльоту або іншого орієнтира і їхні похідні; - висоту польоту літального апарата над рівнем моря (барометрична або абсолютна висота) і над рівнем земної поверхні (геометрична висота); - швидкість руху літального апарата відносно повітря (істинна повітряна швидкість); - кути, які характеризують положення вектора повітряної швидкості відносно зв'язаної системи координат (кути атаки і ковзання); - істинний і магнітний курс літака, кут нахилу відносно горизонту його траєкторії; - швидкість літального апарата відносно земної поверхні (шляхова швидкість і кут зносу літального апарата); - кути, які характеризують положення літального апарата (зв'язаної системи координат літального апарата) відносно горизонтованої рухомої системи координат, що не обертається (кути рискання, тангажа і крену); - кутові швидкості обертання літального апарата. Інформація про координати і рух наземних цілей включає в себе такі параметри: - дальність до цілі і положення вектора дальності відносно осей зв'язаної системи координат літального апарата (бортовій кут і кут місця цілі); - фактичні лінійні координати цілі відносно літального апарата у зв'язаній системі координат і (або) у горизонтованій рухомій системі координат; - шляхова швидкість цілі відносно земної (водної) поверхні. Стан і рух повітряного середовища характеризується атмосферним тиском, щільністю повітря і напрямком вітру. Відомий спосіб прицілювання, що полягає в підсвічуванні прицільної марки прицілу і сполученні її із центром зображення цілі [1]. До недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження. Відомий спосіб прицілювання, при якому розглядають місце знаходження цілі, по якій передбачається вести стрільбу, виявляють ціль, вводять у поле зору одного з очей цілевказівник, що несе потік інформації тільки про орієнтацію зброї, цілевказівником частково перекривають поле зору ока, за рахунок чого формують два незалежних оптичних канали, один із яких служить тільки для введення інформації про місце знаходження цілі для прицілювання, інший - тільки для введення інформації про орієнтацію зброї, при цьому залежно від розв'язуваного тактичного завдання, місце знаходження цілі, по якій передбачається вести стрільбу, розглядають або неозброєним оком, або зі збільшенням і/або посиленням по яскравості, для чого використовують додаткові оптичні системи, а прицілювання здійснюють сполученням прицільної точки зображення візирної марки, сформованої в просторі об'єктів прицілювання оптичною системою цілевказівника, з вибраною точкою поразки на цілі, причому залежно від тактичного завдання управляють енергетичними співвідношеннями світлових потоків, що надходять по двох незалежних оптичних каналах, вводять виправлення, наприклад, на швидкість і дальність до цілі, усувають надлишкову інформацію про об'єкт прицілювання тим, що рухом голови міняють положення ока спостерігача або жорстко встановлених на його голові додаткових оптичних систем відносно цілевказівника або міняють положення ока щодо додаткових оптичних систем, якщо вони жорстко закріплені на зброї [2]. 1 UA 93037 U 5 10 15 20 25 30 35 40 45 50 55 До недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання необхідну для ефективного застосування авіаційних засобів ураження. Відомий спосіб прицілювання по рухомій цілі, що включає пошук цілі, її виявлення й наведення зброї на ціль за допомогою коліматорного прицілу шляхом сполучення прицільної марки з ціллю, при цьому пошук, виявлення цілі й наведення зброї на ціль здійснюють працюючими в погодженому режимі двома очами шляхом одержання одним оком безпосередньої видимої інформації про ціль, а другим оком - точно такої ж інформації, що пройшла через коліматорний приціл, який виконано у вигляді одиночної лінзи без оправи, джерела світла з прицільною маркою й оптичним клином, причому при наведенні зброї на ціль проводять сполучення прицільної марки з ціллю або одночасно сполучають прицільну марку й відкритий приціл з ціллю, та проводять автоматичну підтримку контрасту між прицільною маркою й навколишнім тлом цілі [3]. До недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання необхідну для ефективного застосування авіаційних засобів ураження. Відомий спосіб прицілювання заснований на пошуку цілі, її виявленні на навколишньому тлі й наведенні зброї на ціль за допомогою звичайного коліматорного прицілу шляхом накладення на неї прицільної марки, яскравість якої періодично змінюється із частотою, що лежить у межах сприйнятливості ока [4]. До недоліків відомого способу належить те, що у цьому способі пошук цілі здійснюють обома очима без використання коліматорного прицілу. При виявленні цілі оператор інтуїтивно направляє зброю із установленим на ньому коліматорним прицілом у напрямку цілі, а потім, прикриваючи одне око, іншим оком шукає ціль через коліматорний приціл. Час, витрачений на пошук цілі одним оком через коліматорний приціл, залежить від кваліфікації оператора й від часу акомодації його ока. При виявленні цілі в полі зору коліматорного прицілу оператор здійснює наведення зброї на ціль за допомогою сполучення прицільної марки з ціллю. Завдяки тому, що яскравість прицільної марки періодично змінюється із частотою, що лежить у межах сприйнятливості ока, повної втрати контрасту між прицільною маркою й навколишнім тлом, на якому знаходиться ціль, не відбувається. Відомий спосіб прицілювання, що полягає в спостереженні лінії прицілювання за ціллю, формуванні інформаційного поля каналу наведення, лінія нульових сигналів керування якого сполучена з лінією прицілювання, при цьому за допомогою автомата супроводу цілі роблять вимір поточних координат, що визначають кутове відхилення цілі щодо лінії прицілювання, і здійснюють розворот лінії нульових сигналів керування інформаційного поля каналу наведення від лінії прицілювання, пропорційно обмірюваному кутовому відхиленню цілі, шляхом подачі сигналів керування, що подаються на акустооптичний дефлектор передавального модуля каналу наведення [5]. До недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження. Відомий спосіб прицілювання, що включає пошук цілі, наведення на неї зброї й сполучення прицільної марки з відеозображенням цілі на моніторі, одержуваним з оглядової відеокамери, закріпленої на зброї, із забезпеченням паралельності головної оптичної осі її об'єктива напрямку стрільби зброї, при цьому пошук цілі й наведення зброї проводять попередньо в широкому тілесному куті по відеозображенню, після чого здійснюють точне наведення зброї й контроль поразки цілі по збільшеному відеозображенню цілі за допомогою сполучення прицільної марки й відеозображення цілі на моніторі, одержуваного від першої додаткової відеокамери, закріпленої на зброї, із забезпеченням паралельності й односпрямованості головних оптичних осей об'єктивів обох відеокамер, причому в процесі точного наведення зброї визначають відстань до цілі за допомогою відеозображення цілі, отриманого при одночасній реєстрації відеозображень цілі від першої додаткової відеокамери й ідентичної їй другої додаткової відеокамери, встановлюваної на зброї із забезпеченням паралельності й 2 UA 93037 U 5 10 15 20 25 30 35 40 45 50 55 60 односпрямованості головних оптичних осей об'єктивів обох додаткових відеокамер, рознесених одна відносно одної на задану відстань, що служить стереоскопічним базисом [6]. До недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження. Відомий спосіб прицілювання, який полягає в тому, що сприймають зображення цілі й наводять на неї приціл, при цьому одночасно зі згаданим зображенням цілі чітко сприймають як мінімум ще одне сформоване зображення цілі, що має інші характеристики й розташоване в межах 45° від нього, що не перешкоджає баченню першого зображення цілі й принаймні частині навколишнього її тла, причому для остаточної стадії попереднього й потім для точного наведення прицілу використовують найбільш зручне зображення цілі або сполучення зображень, для чого зменшують сприйману яскравість зайвих зображень цілі за допомогою переміщення ока щодо прицілу або зосереджують увагу на зручному зображенні цілі або сполученні зображень, а додатково сформоване зображення цілі одержують або за допомогою телескопічної системи, або за допомогою електронно-оптичного перетворювача або за допомогою тепловізійного приладу спостереження [7]. До недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження. Відомий спосіб прицілювання, реалізований у пристрої для прицілювання комплексу озброєння, який полягає в підсвічуванні прицільної марки й сполученні її із центром зображення цілі, при цьому забезпечується одноманітність прицілювання у всіх випадках стрільби, у тому числі при стрільбі при русі об'єкта техніки, по рухомій цілі, що супроводжується зміною дальності, при бічному вітрі та інше [8]. Це досягнуто за рахунок введення виправлень на відхилення умов стрільби від нормальних у положення зброї, а не прицільної марки. До недоліків відомого способу належить те, що при стрільбі в умовах перешкод (особливо світлових), а також складних (яскравих і строкатих) фонів засобом ураження на великі дальності істотно зростає небезпека втрати цілі й зриву стрільби. Світлові перешкоди, що діють на око навідника, зліплять його. А оскільки процес прицілювання при стрільбі керованим засобом ураження (насамперед, ракетою) триває значний час (до 20 с), то ймовірність його зриву велика (в 2-3 рази більше, ніж при звичайній стрільбі артилерійськими снарядами). Крім того, при промаху керованого засобу ураження (ракети) навідник змушений утримувати прицільну марку на центрі цілі (точці прицілювання) до закінчення програми наведення керованого засобу ураження, що на 4-5 секунд триває довше, ніж рух керованого засобу ураження на максимальну дальність. Це значно збільшує час на поразку цілі. Збільшення ймовірності зриву прицілювання й часу на поразку цілі значно знижує ефективність стрільби керованим засобом ураження ракетою. Найбільш близьким технічним рішенням як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є спосіб прицілювання, який полягає в тому, що включають приціл, що містить відбивач, блок формування прицільної сітки та вузол ручного уведення кута прицілювання, виконують політ літального апарата в район цілі, оцінюють по приладах параметри польоту, проводять пошук цілі і її виявлення на навколишньому тлі місцевості, визначають дальність до цілі, визначають швидкість руху цілі, визначають відповідно, для стрільби - кути прицілювання й кут упередження, а для бомбометання необхідне положення цілі для рішення завдання прицілювання, пілотують літальний апарат так, щоб ціль на сітці відбивача прицілу зайняла положення, що відповідає, відповідно, для стрільби - кутам прицілювання й упередження, а для бомбометання - необхідному положенню цілі, приймають рішення щодо знаходженні цілі в зоні дозволеної стрільби або точці бомбометання і виконують стрільбу/бомбометання [9]. До недоліків відомого способу, який вибрано за найближчий аналог (прототип), належить те, що оператор не забезпечується інформацією щодо щирої (а не приладової) швидкості польоту, кутах сковзання, зносу, швидкості вітру, при цьому задача прицілювання вирішується вручну ізза відсутності автоматизованого забезпечення льотчика (оператора) інформацією, що вказана вище (за відсутністю на літальному апараті пристроїв та датчиків передачі зазначеної інформації). До основних недоліків відомого способу належить те, що не забезпечують автоматичне одержання інформації (прицільних інформаційних параметрів та їх відображення 3 UA 93037 U 5 10 15 20 25 30 35 40 45 50 55 на відбивачі прицілу), необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом, спрощення керування літальним апаратом під час прицілювання та не забезпечують точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження, що, у комплексі не сприяє підвищення точності прицілювання та ефективності стрільби/бомбометання по нерухомій/рухомій наземній цілі. В основу корисної моделі поставлено задачу шляхом введення до технології прицілювання нових технологічних операцій, що сприятимуть автоматичному отриманню прицільних інформаційних параметрів та їх відображення на відбивачі прицілу, забезпечити в комплексі підвищення точності прицілювання та ефективності стрільби/бомбометання по нерухомій/рухомій наземній цілі. Суть корисної моделі в способі прицілювання, який полягає в тому, що включають приціл, що містить відбивач, блок формування прицільної сітки та вузол ручного уведення кута прицілювання, виконують політ літального апарата в район цілі, оцінюють по приладах параметри польоту, проводять пошук цілі і її виявлення на навколишньому тлі місцевості, визначають дальність до цілі, визначають швидкість руху цілі, визначають відповідно, для стрільби - кути прицілювання й кут упередження, а для бомбометання необхідне положення цілі для рішення завдання прицілювання, пілотують літальний апарат так, щоб ціль на сітці відбивача прицілу зайняла положення, що відповідає, відповідно, для стрільби - кутам прицілювання й упередження, а для бомбометання - необхідному положенню цілі, приймають рішення щодо знаходження цілі в зоні дозволеної стрільби або точці бомбометання і виконують стрільбу/бомбометання, полягає в тому, що попередньо допрацьовують приціл літального апарата шляхом встановлення на ньому лазерного далекоміра, приймача супутникової навігаційної системи, телевізійного індикатора, мікропроцесора, малогабаритної електромеханічної інерційної системи й датчиків, після визначення кутів прицілювання й кута упередження відображають на відбивачі прицілу прицільні інформаційні параметри, отримані за допомогою додаткового устаткування й мікропроцесора, а при одержанні прицільних інформаційних параметрів, накладають перехрестя прицілу на ціль шляхом маневрування літальним апаратом у просторі. Суть корисної моделі полягає і в тому, що параметри польоту визначають шляхом прямих вимірів за допомогою вузла супутникової навігаційної системи малогабаритної електромеханічної інерційної системи й лазерного далекоміра, а параметри польоту, які неможливо визначити за допомогою прямих вимірів - повітряну швидкість, швидкість вітру, кути тангажа та ковзання, визначають непрямим шляхом за інформацією з введених додаткових пристроїв та систем. Суть корисної моделі полягає також і в тому, що на відбивачі прицілу відображають такі параметри, як необхідні координати цілі, відповідно, при стрільбі - кутове положення цілі відносно осі прицілу, діапазон дальності дозволеної стрільби, при бомбометанні - параметри прицілювання за напрямком та дальністю, а також необхідну службову інформацію, що стосується працездатності лазерного далекоміра та вузла супутникової навігаційної системи, і разові команди дозволу стрільби та бомбометання. Новим в корисній моделі є те, що параметри польоту власного літального апарата, дальність до цілі й швидкість руху цілі визначають, відповідно, за допомогою лазерного далекоміра, вузла супутникової навігаційної системи, малогабаритної електромеханічної інерційної системи, а завдання прицілювання при стрільбі і/або бомбометанні вирішують автоматично за допомогою мікропроцесора. Новим в корисній моделі є також й те, що рішення про знаходження цілі в зоні дозволеної стрільби або точці бомбометання приймають на підставі прицільних інформаційних параметрів. Рішення технічної задачі в способі прицілювання, який заявляється, дійсно можливе тому, що: - шляхом доопрацювання прицілу літального апарата додатковим встановленням на ньому лазерного далекоміра, вузла супутникової навігаційної системи, телевізійного індикатора, мікропроцесора, малогабаритної електромеханічної інерційної системи й датчиків забезпечують автоматичне одержання інформації, необхідної для вирішення задач прицілювання безпосередніми вимірами та/або побічним способом; - шляхом відображення (після визначення кутів прицілювання й упередження) на відбивачі прицілу прицільних інформаційних параметрів, отриманих за допомогою додаткового устаткування й мікропроцесора забезпечують спрощення керування літальним апаратом під час прицілювання; - шляхом маневрування літальним апаратом у просторі (після одержання прицільних інформаційних параметрів і накладання перехрестя прицілу на ціль) забезпечують точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження. 4 UA 93037 U 5 10 15 20 25 30 35 40 45 50 55 Суть корисної моделі в способі прицілювання пояснюється за допомогою креслень, де на Фіг. 1-8 показано схеми поетапного виконання технологічних операцій, що являють собою у комплексі суть способу прицілювання, який заявляється, на Фіг. 9 показано блок-схему прицілу, за допомогою якого здійснюється спосіб прицілювання, який заявляється. Спосіб прицілювання, що заявляється, реалізується за допомогою прицілу (наприклад, прицілу коліматорного вертолітного типу ПКВ [10]), що містить відбивач, блок формування прицільної сітки та вузол ручного уведення кута прицілювання, а також додаткового обладнання, яке встановлено на ньому (на літальному апараті, наприклад, на вертольоті типу Мі-8МТ, Мі-8МТВ, Мі-17), а саме за допомогою лазерного далекоміра, приймача супутникової навігаційної системи, телевізійного індикатора, мікропроцесора, малогабаритної електромеханічної інерційної системи й датчиків (див. схему на Фіг. 9), які створюють авіаційну прицільну систему (позиція "АПС") - див. схеми на Фіг. 1 та на Фіг. 9. Дана система забезпечує прицілювання при застосуванні некерованих авіаційних ракет, стрільбі з артилерійської зброї, розміщеної в підвісних контейнерах, стрільбі з носового кулемета ПКТ, встановленого нерухомо і при бомбометанні з горизонтального польоту і з кабрування. Зазначена вище система (позиція "АПС") (див. схему на Фіг. 9) забезпечує формування прицільної інформації при стрільбі з вертольотів типу Мі-8МТ, Мі-8МТВ, Мі-17 (всіх модифікацій) наступними видами зброї: - некерованими ракетами С-5, С-8; - з кулемета ПКТ, встановленого нерухомо в носовій частині фюзеляжа; - з кулеметів ЯкБ-12,7 та ГШГ, встановлених у підвісних гондолах ГУВ-1; - з гранатометів АГ-17В, встановлених у підвісних гондолах ГУВ-2; - з гармат ГШ-23Л, встановлених в УПК-23-250. Первинними джерелами висхідної інформації для вирішення задачі прицілювання в авіаційній прицільній системі (позиція "АПС") є: - глобальна супутникова система навігації GLONASS/GPS; - лазерний далекомір, датчики кутових швидкостей, - пульт керування і індикації (розміщений штатно на борту вертольота, що надає інформацію щодо вибору типу зброї і режимі прицілювання, а також типу боєприпасу). По первинній інформації визначаються координати і параметри руху цілі, координати і параметри руху вертольота, його просторове розташування, складові вектори швидкості вітру і кут зносу вертольота. В результаті рішення задачі прицілювання формується інформація для керування вертольотом і зброєю, попереджувальні і виконавчі сигнали дозволу стрільби й скидання бомб. З урахуванням визначеного вище, спосіб прицілювання, що заявляється, полягає в наступному. Попередньо базовий приціл 1, що містить відбивач 2, блок 3 формування прицільної сітки 4 та вузол 5 ручного уведення кута прицілювання, дообладнують шляхом встановлення лазерного далекоміра 6, вузол 7 супутникової навігаційної системи, телевізійного індикатора 8, мікропроцесора 9, малогабаритної електромеханічної інерційної системи 10 й датчиків 11 (див. схему на Фіг. 1 та схему на Фіг. 9). Після дообладнання прицілу 1 і літального апарата 12 (наприклад, вертольота типу Мі-8) зазначеним вище обладнанням (позиції 2-10) та датчиками 11 (які створюють авіаційну прицільну систему (позиція "АПС") - див. схему на Фіг. 10), здійснюють зліт літального апарата 12 і його політ в район цілі 13 (див. схему на Фіг. 2). В процесі польоту (а особливо в районі цілі 13) оцінюють по приладах (14), що штатно встановлені на літальному апараті 12, параметри польоту, при цьому параметри польоту визначають шляхом прямих вимірів за допомогою вузла супутникової навігаційної системи 7 (позиція GPS - див. схему на Фіг. 2), малогабаритної електромеханічної інерційної системи 10 та лазерного далекоміра 6, а параметри польоту, які неможливо визначити за допомогою прямих вимірів - повітряну швидкість Vла, швидкість Vв вітру й кути (позиції ω та γ), відповідно, тангажа та ковзання, визначають непрямим шляхом за інформацією з додаткових датчиків 11, вбудованих у літальний апарат 12 (наприклад, вертоліт типу Мі-8 всіх модифікацій) (див. схему на Фіг. 2). В районі 15 цілі проводять пошук цілі 13 та її виявлення на навколишньому тлі 16 місцевості (див. схему на Фіг. 3). При виявленні цілі 13 на навколишньому тлі 16 місцевості визначають дальність D до зазначеної цілі 13 (за допомогою лазерного далекоміра 6), а якщо ціль 13 рухома - то 5 UA 93037 U 5 10 15 20 25 30 35 40 45 визначають швидкість Vц руху зазначеної цілі (за допомогою малогабаритної електромеханічної інерційної системи 10 та мікропроцесора 9 побічним способом) (див. схему на Фіг. 3). Далі визначають кути δ прицілювання й кут φ упередження для рішення завдання прицілювання (а для бомбометання - необхідне положення цілі 13 для рішення завдання прицілювання), при цьому завдання прицілювання при стрільбі і/або бомбометанні вирішують автоматично за допомогою мікропроцесора 9 (див. схему на Фіг. 4). Після визначення кутів δ прицілювання й кута φ упередження відображають на відбивачі 2 прицілу 1 прицільні інформаційні параметри, отримані за допомогою додаткового устаткування (позиції 6-8, 10, 11) й мікропроцесора 9, причому на відбивачі 2 прицілу 1 відображають такі параметри, як необхідні координати цілі 13, відповідно, при стрільбі - кутове положення цілі відносно осі прицілу 1, діапазон дальності дозволеної стрільби, при бомбометанні - параметри прицілювання за напрямком та дальністю D, а також необхідну службову інформацію, що стосується працездатності лазерного далекоміра 6 та вузла супутникової навігаційної системи 7, і разові команди дозволу стрільби та бомбометання (див. схему на Фіг. 5). При одержанні прицільних інформаційних параметрів, накладають перехрестя (прицільну сітку 4) прицілу 1 на ціль 13 шляхом маневрування літальним апаратом 12 у просторі (див. схеми на Фіг. 5-6). Продовжують технологічний процес прицілювання тим, що пілотують літальний апарат 12 так, щоб ціль 13 у прицільній сітці 4 відбивача 2 прицілу 1 зайняла положення, що відповідає кутам δ прицілювання й упередження (позиція φ), а для бомбометання - необхідне положення цілі 13. Після чого ухвалюють рішення щодо знаходження цілі 13 в зоні дозволеної стрільби або точці бомбометання (при цьому рішення про знаходження цілі 13 в зоні дозволеної стрільби або точці бомбометання приймають на підставі прицільних інформаційних параметрів) (див. схему на Фіг. 6). Завершують технологічний процес прицілювання тим, що виконують стрільбу (див. схему на Фіг. 7) або бомбометання (див. схему на Фіг. 8). Підвищення ефективності застосування способу прицілювання, що заявляється, у порівнянні з прототипом досягається тим, що шляхом автоматизації одержання інформації та розв'язку задач прицілювання забезпечують спрощення керування літальним апаратом під час прицілювання та точність прицілювання, необхідну для ефективного застосування авіаційних засобів ураження. Джерела інформації: 1. Патент Российской Федерации № 2079090 - аналог. 2. Патент Российской Федерации № 2107878 - аналог. 3. Патент Российской Федерации № 2168692 - аналог. 4. Патент США № 3963356 від 1976р. (МПК 6 G 02 В 27/34) - аналог. 5. Патент Российской Федерации № 2413159 - аналог. 6. Патент Российской Федерации № 2395054 - аналог. 7. Патент Российской Федерации № 2155926 - аналог. 8. "Танк Т-80Б. Техническое описание и инструкция по эксплуатации", кн.1., М.: Воениздат, 1984, с.48-64 - аналог. 9. Патент США № 4136963 "Способ ведения прицельной стрельбы", 1979 г., МПК 6 G 02 В 27/34 - прототип 10. Вертолет МИ-8. Устройство и техническое обслуживание - М.: Транспорт, 1988. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 1. Спосіб прицілювання, який полягає в тому, що включають приціл, що містить відбивач, блок формування прицільної сітки та вузол ручного уведення кута прицілювання, виконують політ літального апарата в район цілі, оцінюють по приладах параметри польоту, проводять пошук цілі і її виявлення на навколишньому тлі місцевості, визначають дальність до цілі, визначають швидкість руху цілі, визначають, відповідно, для стрільби - кути прицілювання й кут упередження, а для бомбометання необхідне положення цілі для рішення задання прицілювання, пілотують літальний апарат так, щоб ціль на сітці відбивача прицілу зайняла положення, що відповідає, відповідно, для стрільби - кутам прицілювання й упередження, а для бомбометання - необхідному положенню цілі, приймають рішення щодо знаходження цілі в зоні дозволеної стрільби або точці бомбометання і виконують стрільбу/бомбометання, який відрізняється тим, що попередньо допрацьовують приціл літального апарата шляхом встановлення на ньому лазерного далекоміра, приймача супутникової навігаційної системи, 6 UA 93037 U 5 10 15 20 телевізійного індикатора, мікропроцесора, малогабаритної електромеханічної інерційної системи й датчиків, після визначення кутів прицілювання й кута упередження відображають на відбивачі прицілу прицільні інформаційні параметри, отримані за допомогою додаткового устаткування й мікропроцесора, а при одержанні прицільних інформаційних параметрів, накладають перехрестя прицілу на ціль шляхом маневрування літальним апаратом у просторі, при цьому параметри польоту визначають шляхом прямих вимірів за допомогою супутникової навігаційної системи малогабаритної електромеханічної інерційної системи й лазерного далекоміра, а параметри польоту, які неможливо визначити за допомогою прямих вимірів повітряну швидкість, швидкість вітру, кути тангажа та ковзання, визначають непрямим шляхом за інформацією з введених додаткових пристроїв та систем, причому на відбивачі прицілу відображають такі параметри, як необхідні координати цілі, відповідно, при стрільбі - кутове положення цілі відносно осі прицілу, діапазон дальності дозволеної стрільби, при бомбометанні - параметри прицілювання за напрямком та дальністю, а також необхідну службову інформацію, що стосується працездатності лазерного далекоміра та вузла супутникової навігаційної системи, і разові команди дозволу стрільби та бомбометання. 2. Спосіб за п. 1, який відрізняється тим, що параметри польоту власного літального апарата, дальність до цілі й швидкість руху цілі визначають, відповідно, за допомогою лазерного далекоміра, вузла супутникової навігаційної системи, малогабаритної електромеханічної інерційної системи, а задання прицілювання при стрільбі і/або бомбометанні вирішують автоматично за допомогою мікропроцесора. 3. Спосіб за п. 1, який відрізняється тим, що рішення про знаходження цілі в зоні дозволеної стрільби або точці бомбометання приймають на підставі прицільних інформаційних параметрів. 7 UA 93037 U 8 UA 93037 U 9 UA 93037 U 10 UA 93037 U 11 UA 93037 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Автори англійськоюArkhypov Mykola Ivanovych, Turenko Serhii Mykhailovych, Alioshyn Oleksandr Mykhailovych, Cherniak Serhiy Ivanovych
Автори російськоюАрхипов Николай Иванович, Туренко Сергей Михайлович, Алешин Александр Михайлович, Черняк Сергей Иванович
МПК / Мітки
МПК: F41G 3/00, G02B 27/00, F41G 1/00
Мітки: прицілювання, спосіб
Код посилання
<a href="https://ua.patents.su/14-93037-sposib-pricilyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб прицілювання</a>
Спосіб прицілювання стрілецької зброї
Номер патенту: 9248
Опубліковано: 15.09.2005
Автори: Квітка Леонід Антонович, Долженков Олександр Федорович, Васильєв Георгій Іванович
МПК: F41G 3/16
Мітки: стрілецької, зброї, спосіб, прицілювання
Формула / Реферат:
Спосіб прицілювання стрілецької зброї, що включає одночасне спостереження за навколишнім простором і зображення прицільної марки, виявлення цілі та суміщення марки з ціллю, який відрізняється тим, що проводять оптико-електронне формування уявної "фантомної" осі прицілювання, при цьому суміщають зображення відеосигналу цілі, сформованого підствольною телевізійною камерою, який передається до монокулярного пристрою відображення за...
Пристрій для прицілювання та стрільби по цілі із вогнепальної зброї
Номер патенту: 26704
Опубліковано: 10.10.2007
Автори: Квітка Леонід Антонович, Долженков Олександр Федорович
МПК: F41G 3/16
Мітки: зброї, цілі, пристрій, прицілювання, вогнепальної, стрільби
Формула / Реферат:
Пристрій для прицілювання та стрільби по цілі із вогнепальної зброї, що містить блок формування зображення, блок відображення інформації, який відрізняється тим, що блок формування зображення, у вигляді телевізійної камери, закріплений на ребрі долоні руки стрільця, а зображення активної прицільної марки формується блоком голографічного когерентного випромінювача, розташованого на зброї.
Спосіб прицілювання
Номер патенту: 52457
Опубліковано: 16.12.2002
Автори: Архипов Микола Іванович, Кравчук Ілля Степанович
МПК: F41G 1/00
Мітки: прицілювання, спосіб
Формула / Реферат:
1. Спосіб прицілювання, при якому вмикають приціл, виконують прицільну марку, одержують відображення прицільної марки на відбивачі прицілу, спостерігають положення прицільної марки відносно цілі і виконують наступне сполучення прицільної марки з ціллю шляхом зміни просторового положення об'єкта техніки з розміщеним на ньому озброєнням, який відрізняється тим, що водночас із включенням прицілу вмикають додаткове джерело формування прицільної...
Спосіб прицілювання
Номер патенту: 41041
Опубліковано: 27.04.2009
Автори: Архипов Микола Іванович, Кравчук Ілля Степанович, Альошин Олександр Михайлович, Туренко Сергій Михайлович
МПК: F41G 1/00
Мітки: спосіб, прицілювання
Формула / Реферат:
1. Спосіб прицілювання, при якому вмикають приціл, що встановлений на об'єкті військової техніки типу літального апарата, виробляють прицільну марку, спостерігають просторове положення прицільної марки відносно цілі, виконують сполучення прицільної марки з ціллю шляхом коректування просторового положення зазначеного об'єкта військової техніки і на завершальному етапі прицілювання після сполучення прицільної марки з ціллю виконують...
Пристрій для прицілювання для вогнепальної зброї і вогнепальна зброя з можливістю встановлення пристрою для прицілювання
Номер патенту: 83822
Опубліковано: 26.08.2008
Автор: Крістіан Шерпф
МПК: F41G 3/06
Мітки: зброї, пристрою, прицілювання, пристрій, вогнепальна, зброя, можливістю, вогнепальної, встановлення
Формула / Реферат:
1. Пристрій для прицілювання для вогнепальної зброї з індикаторним пристроєм, який є складовою вимірювального пристрою для визначення відстані до цілі, яку спостерігають і яку можна бачити у полі зору стрільця, який відрізняється тим, що має перехідний пристрій (11), за допомогою якого розташовані у/на пристрої для прицілювання (1) складові вимірювального пристрою у визначеному режимі монтажу пристрою для прицілювання (1) на вогнепальній...
Попередній патент: Спосіб діагностики стадій хронічного стресу
Наступний патент: Спосіб захисту об’єктів бронетанкової техніки від самоприцілювальних бойових елементів касетних засобів ураження, оснащених інфрачервоними датчиками цілі
Випадковий патент: Двоконтурний панельний теплообмінник з подвійними рідинними сорочками