З’єднувальний пристрій, щонайменше двох тіл, зокрема щонайменше двох тіл складових частин групи механічної автоматизації рухів зі знімною групою з’єднання
Формула / Реферат
1. З’єднувальний пристрій (10), який має щонайменше два тіла (11а, 11б) складових частин групи механічної автоматизації рухів, які потрібно з'єднати одне з одним, і групу (12) з'єднання щонайменше двох тіл (11а, 11б) одне з одним з можливістю роз'єднання, який відрізняється тим, що кожне з двох тіл має:
взаємно опорну поверхню (13а, 13б) для взаємного опирання поверхні одного тіла на поверхню другого,
з′єднувальний профіль (14а, 15а, 14б, 15б) для з'єднання з групою (12) з'єднання, визначений щонайменше у двох відповідних протилежних периметричних частинах відповідної взаємно опорної поверхні (13а, 13б), і
щонайменше одну канавку (21а, 21б), виконану у взаємно опорній поверхні (13а, 13б) і таку, що простягається між відповідними двома протилежними периметричними частинами, причому у з'єднаному стані щонайменше одна канавка (21а, 21б) одного з двох тіл (11а, 11б) є оберненою до щонайменше однієї канавки (21а, 21б) другого з двох тіл (11а, 11б) з утворенням отвору (20), і тим, що
група (12) з'єднання має щонайменше одну пару затискних елементів (17, 18), виконаних з можливістю зачеплення із з'єднувальними профілями (14а, 15а, 14б, 15б) і знімного з'єднування один з одним за допомогою щонайменше одного з'єднувального елемента (19), причому з′єднувальний елемент (19) розташовано із зазором у відповідному отворі (20), та щонайменше одну втулку (25, 25'), виконану з можливістю знімного уведення в щонайменше одну канавку (21а, 21б) кожного із щонайменше двох тіл (11а, 11б).
2. Пристрій (10) за п. 1, який відрізняється тим, що взаємно опорні поверхні (13а, 13б) щонайменше двох тіл (11а, 11б) збігаються одна з одною по щонайменше одному розміру (D).
3. Пристрій (10) за п. 2, який відрізняється тим, що протилежні периметричні частини кожної із взаємно опорних поверхонь (13а, 13б) простягаються вздовж відповідної лінії, яка стосується зазначеного розміру.
4. Пристрій (10) за п. 3, який відрізняється тим, що лінії, вздовж яких простягаються протилежні периметричні частини кожної із взаємно опорних поверхонь (13а, 13б), суть прямими лініями, паралельними одна одній, і простягаються під прямим кутом до розміру
(D).
5. Пристрій (10) за будь-яким з пп. 2-4, який відрізняється тим, що щонайменше одна канавка (21а, 21б) простягається паралельно розміру (D).
6. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що кожне з двох тіл (11а, 11б) має декілька канавок (21а, 21б), розташованих паралельно одна одній і на певній відстані одна від одної, причому у з'єднаному стані щонайменше частину канавок (21а, 21б) одного з двох тіл (11а, 11б) обернено до щонайменше відповідної частини канавок (21а, 21б) іншого з двох тіл (11а, 11б) для утворення множини отворів (20).
7. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що щонайменше одна втулка (25) має наскрізний осьовий отвір (26) для проходження в ньому щонайменше одного з'єднувального елемента (19).
8. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що кожен затискний елемент (17, 18) щонайменше однієї пари затискних елементів має пару плоских внутрішніх поверхонь (171, 172, 181, 182), що сходяться одна з одною V-подібним чином
і тим, що кожний із з'єднувальних профілів (14а, 14б, 15а, 15б) кожного з тіл (11а, 11б) має нахилену плоску стінку (140а, 140б, 150а, 150б), що простягається від відповідної взаємно опорної поверхні (13а, 13б), утворюючи гострий кут з нею, причому в з'єднаному стані внутрішні поверхні (171, 172, 181, 182) кожного затискного елемента (17, 18) щонайменше однієї пари затискних елементів спираються на нахилені плоскі стінки (140а, 140б, 150а, 150б) щонайменше двох тіл (11а, 11б), а взаємно опорні поверхні (13а, 13б) щонайменше двох тіл (11а, 11б) спираються одна на одну.
9. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що щонайменше один з'єднувальний елемент (19) складається з різьбового стрижня, протилежні кінці якого виконано з можливістю з'єднання із затискними елементами (17, 18) щонайменше однієї пари затискних елементів.
10. Складова частина групи механічної автоматизації рухів, зокрема виконавчий механізм, повзун, захват, профільний сортовий метал або направляючі рейки, яка відрізняється тим, що має тіло(11а, 11б) з опорною поверхнею (13а, 13б), яка спирається на відповідну опорну поверхню (13а, 13б) тіла (11а, 11б) іншої складової частини, з'єднувальний профіль (14а, 15а, 14б, 15б) з групою (12) з'єднання, визначеною у відповідності до щонайменше двох протилежних периметричних частин опорної поверхні (13а, 13б), причому група (12) з'єднання має щонайменше одну пару затискних елементів (17, 18), які рознімно з'єднані один з одним щонайменше одним з'єднувальним елементом (19) і щонайменше однією втулкою (25, 25'), та щонайменше одну канавку (21а, 21б), виконану у взаємно опорній поверхні (13а, 13б) і яка простягається між двома протилежними периметричними частинами для розташування з зазором з'єднувального елемента (19) та/або щонайменше однієї втулки (25, 25').
11. Складова частина за п. 10, яка відрізняється тим, що протилежні периметричні частини опорної поверхні (13а, 13б) простягаються уздовж відповідної прямої лінії, причому лінії, вздовж яких протилежні периметричні частини простягаються, суть паралельними одна одній і простягаються під прямим кутом до розміру (D) опорної поверхні.
12. Складова частина за п. 11, яка відрізняється тим, що щонайменше одна канавка (21а, 21б) простягається паралельно розміру (D).
13. Складова частина за будь-яким з пп. 10-12, яка відрізняється тим, що тіло (11а, 11б) має декілька канавок (21а, 21б), розташованих паралельно одна одній і на певній відстані одна від одної.
14. Складова частина за будь-яким з пп. 10-13, яка відрізняється тим, що кожний із з'єднувальних профілів (14а, 15а, 14б, 15б) має нахилену плоску стінку (140а, 150а, 140б, 150б), яка простягається від відповідної опорної поверхні (13а, 13б), утворюючи гострий кут з нею.
15. Знімна група (12) з'єднання щонайменше двох тіл (11а, 11б) складових частин групи механічної автоматизації рухів за будь-яким з пп. 10-14, яка має щонайменше одну пару затискних елементів (17, 18), виконаних з можливістю з'єднання із відповідними з'єднувальними профілями (14а, 15а, 14б, 15б) щонайменше двох тіл (11а, 11б) і рознімного з'єднання один з одним за допомогою щонайменше одного з'єднувального елемента (19), яка відрізняється тим, що кожний затискний елемент (17, 18) щонайменше однієї пари затискних елементів має пару плоских внутрішніх поверхонь (171, 172, 181, 182), що сходяться одна з одною V-подібним чином з можливістю зачеплення в опорному положенні на з'єднувальних профілях (14а, 15а, 14б, 15б), причому з'єднувальний елемент (19) виконано з можливістю його уведення в отвір (20), визначений щонайменше однією канавкою (21а, 21б) двох тіл (11а, 11б), і тим, що має щонайменше одну втулку (25, 25'), виконану з можливістю знімного уведення в щонайменше одну канавку (21а, 21б) кожного із щонайменше двох тіл (11а, 11б).
16. Група (12) з'єднання за п. 15, яка відрізняється тим, що щонайменше одна втулка (25) має наскрізний осьовий отвір (26) для проходження в ньому щонайменше одного з'єднувального елемента (19).
Текст
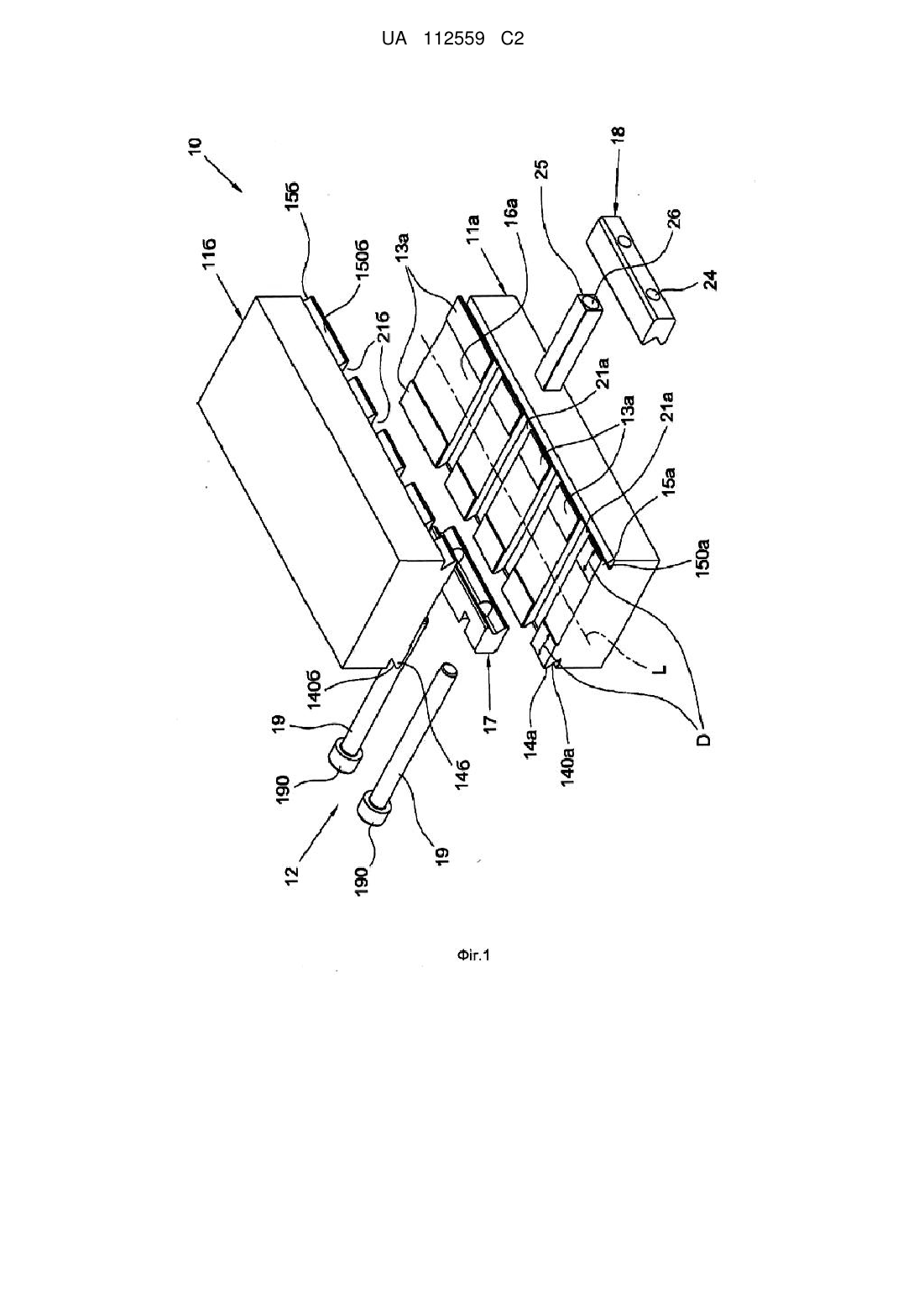
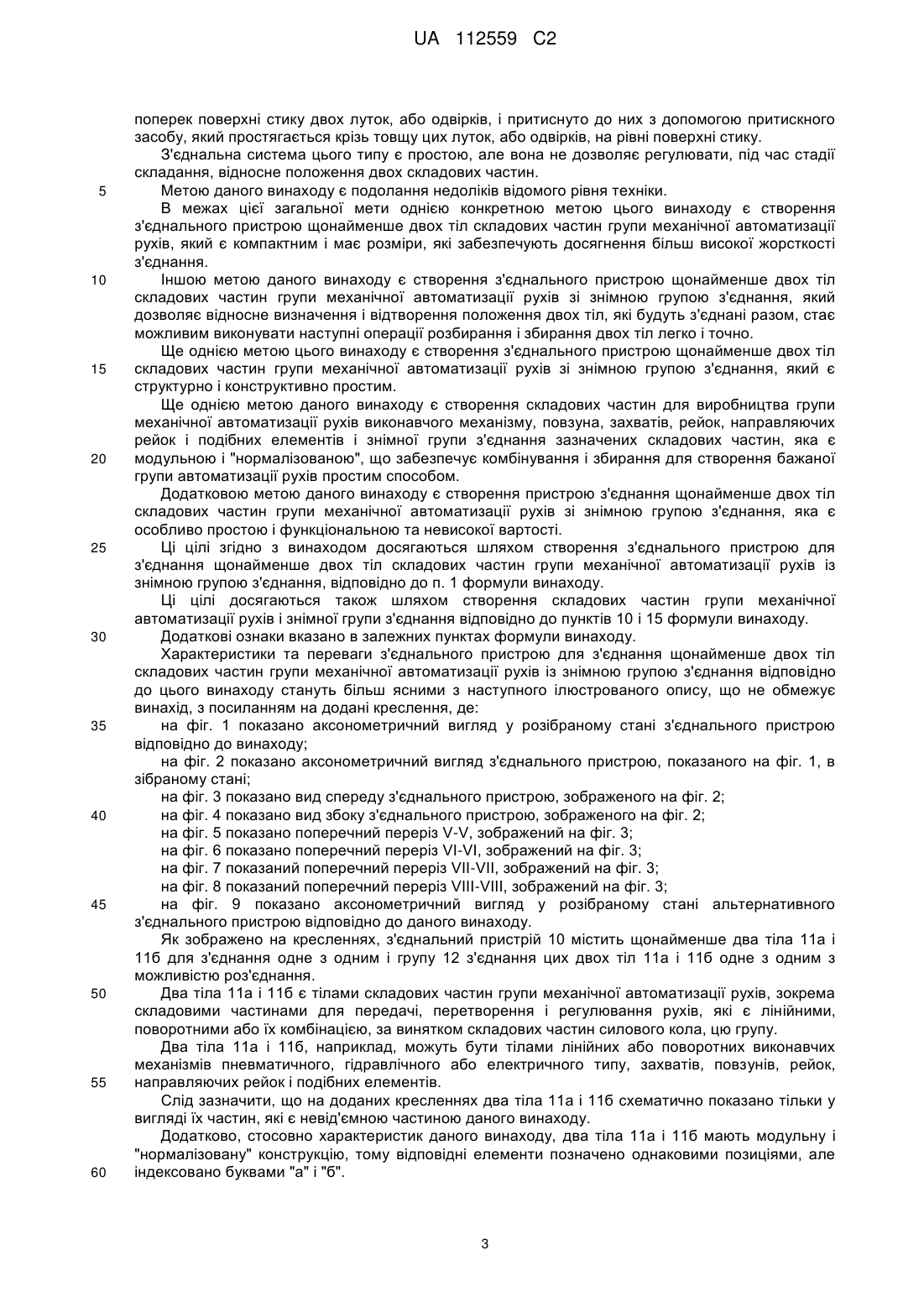
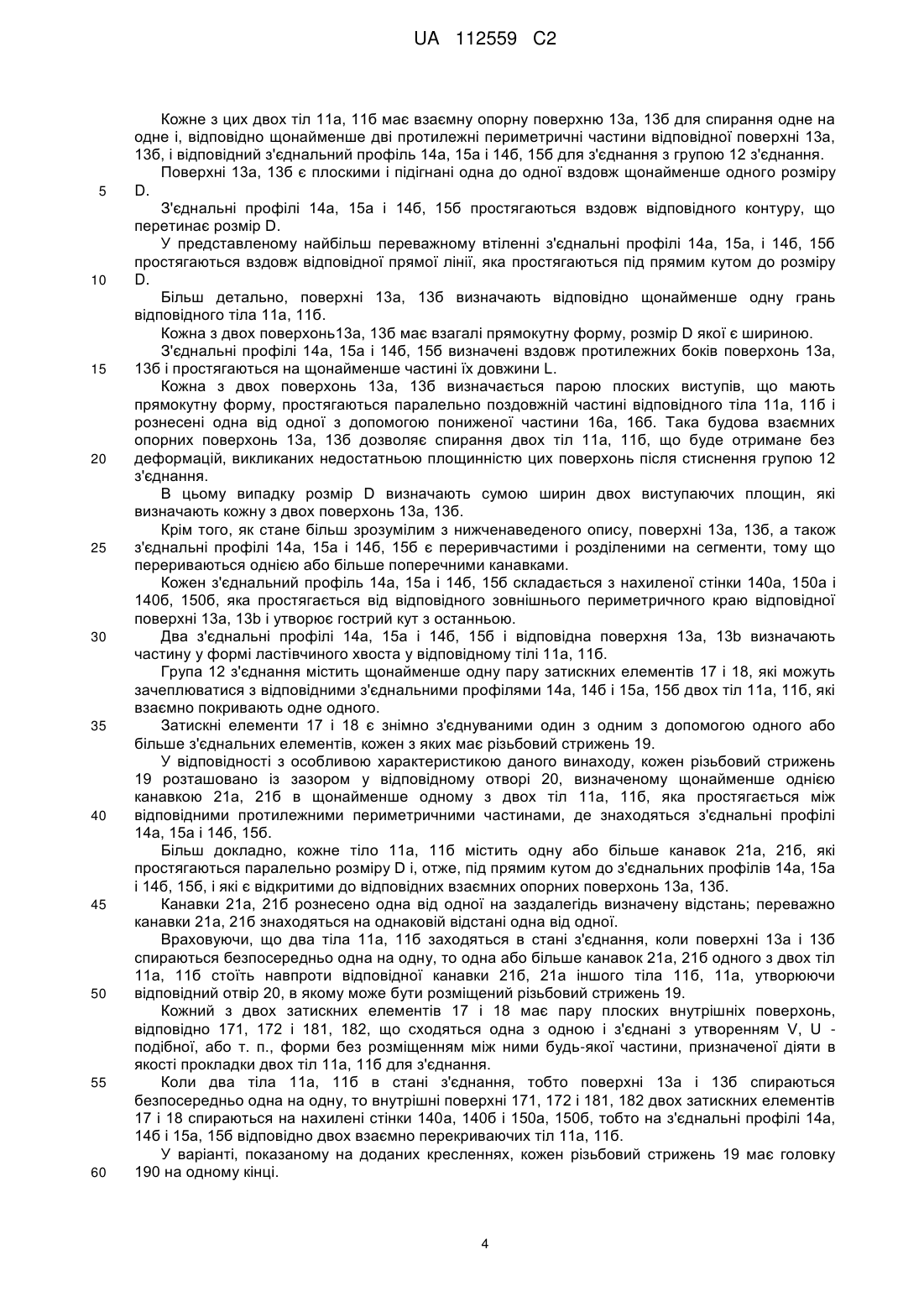
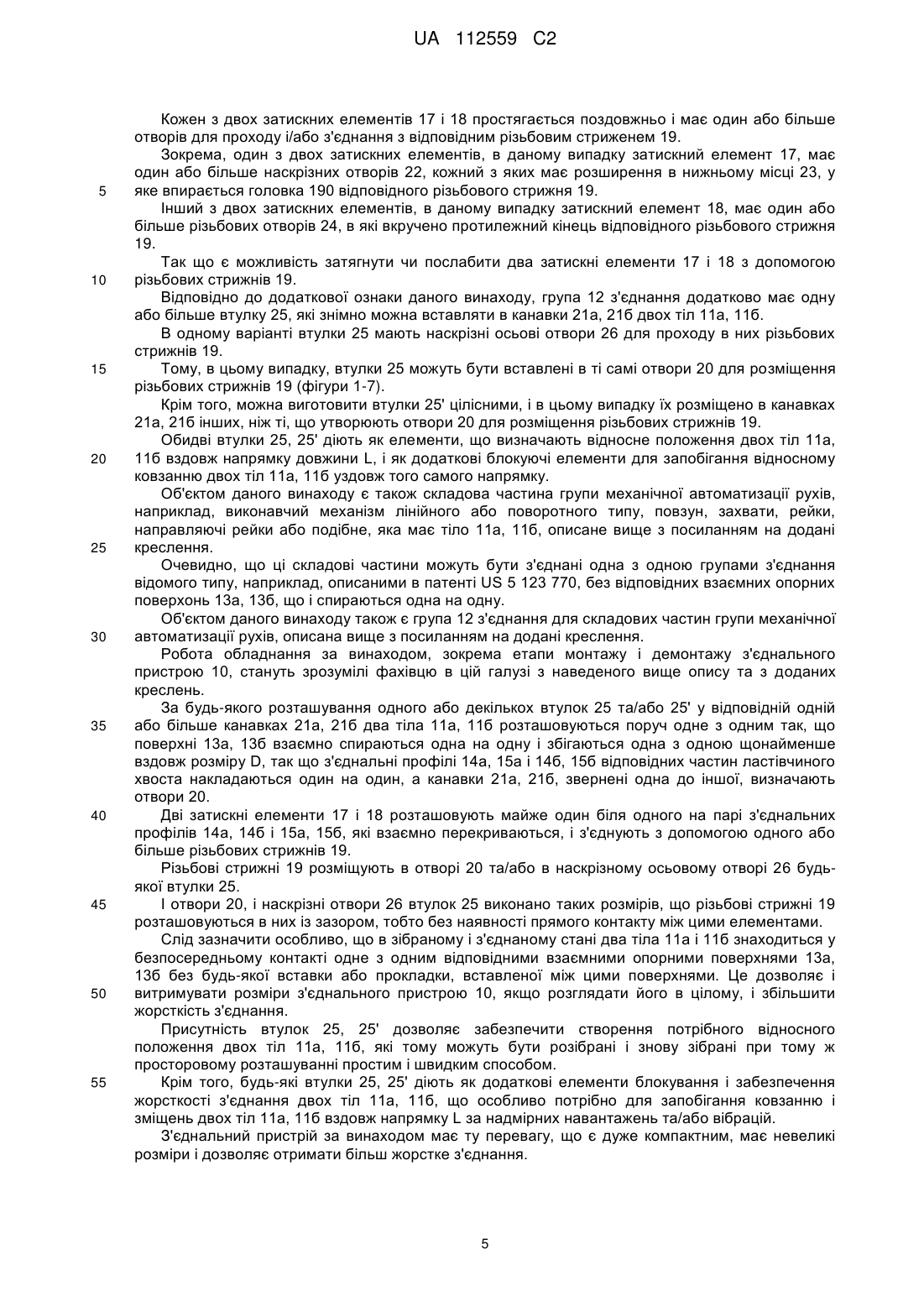
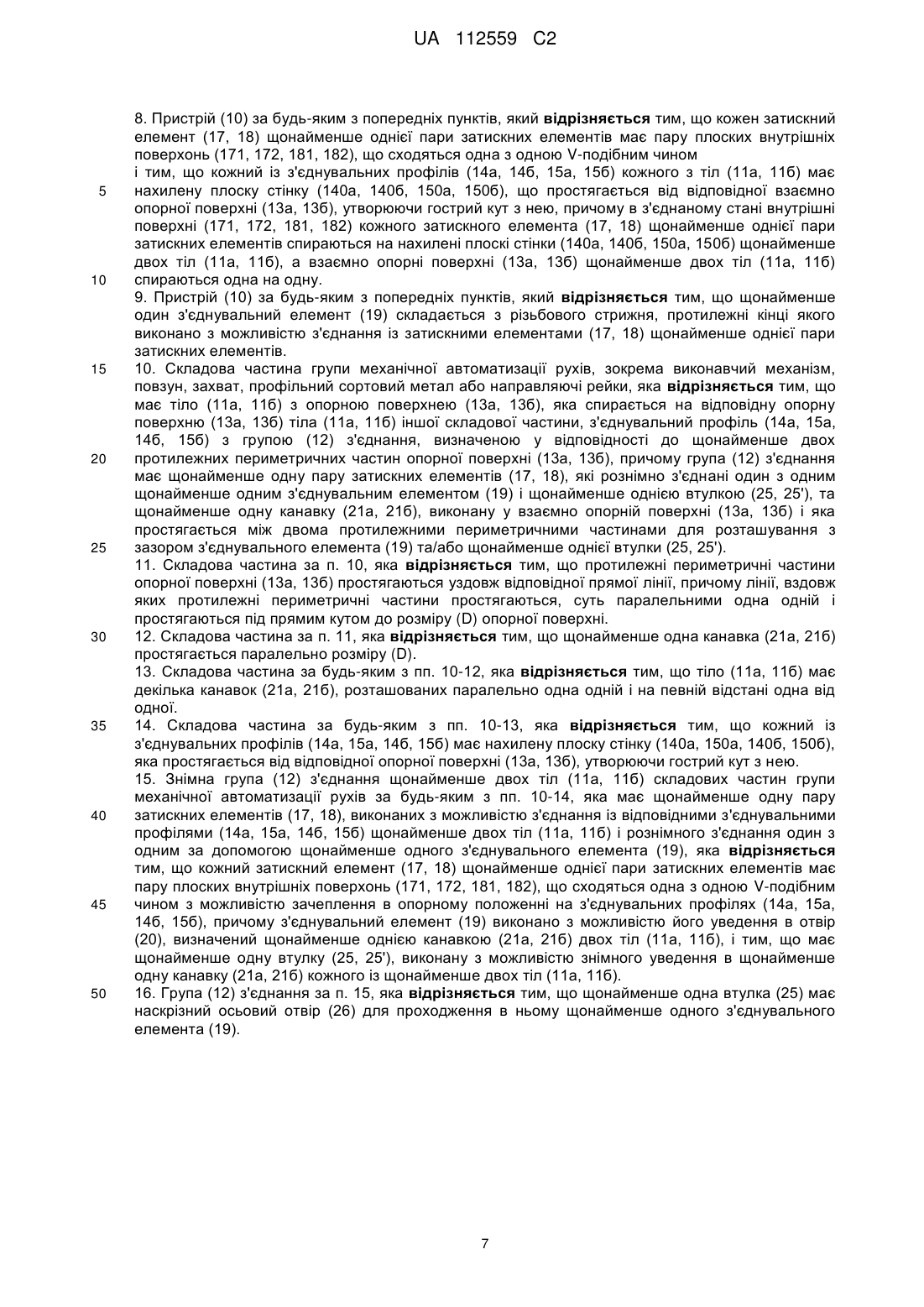
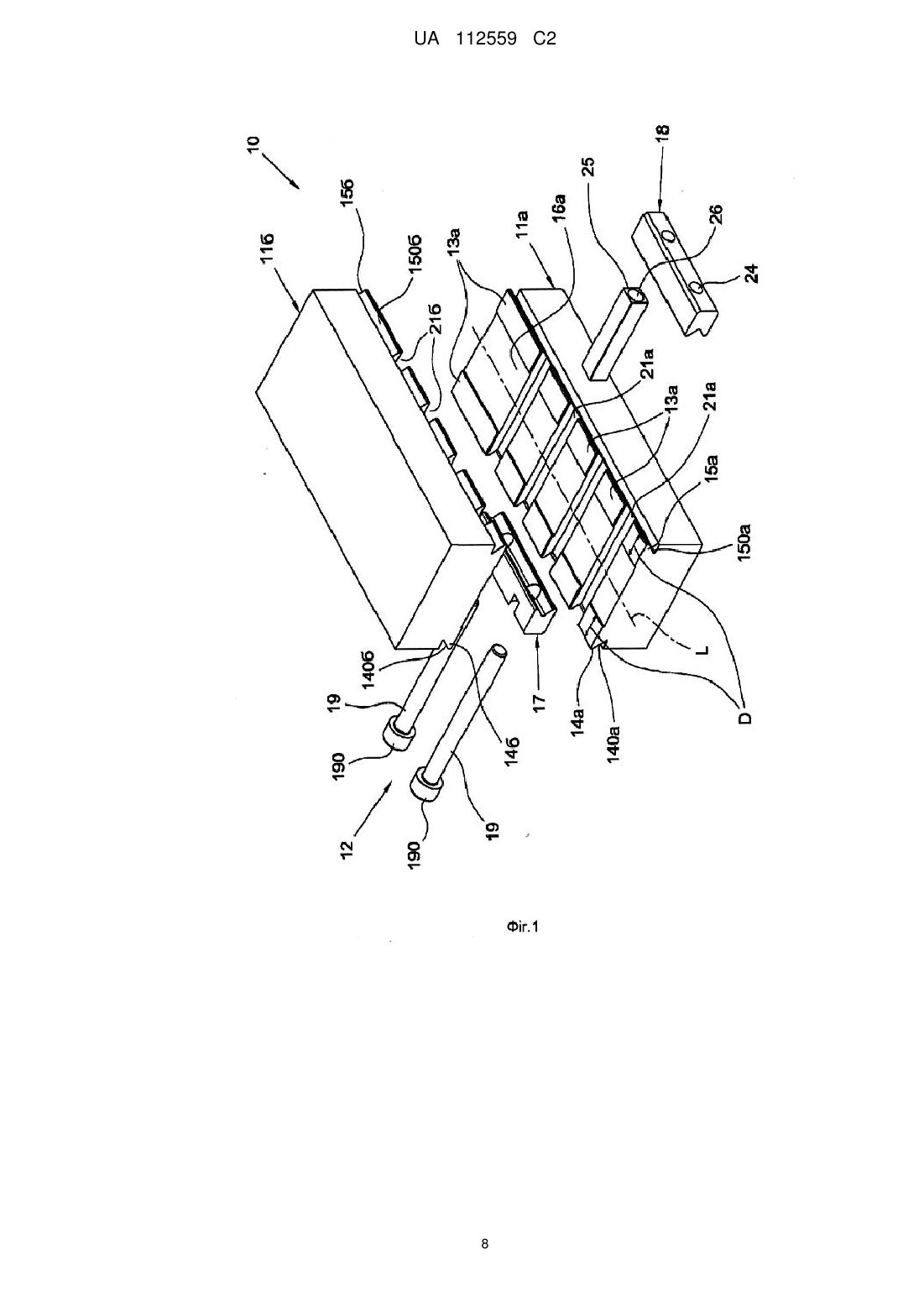
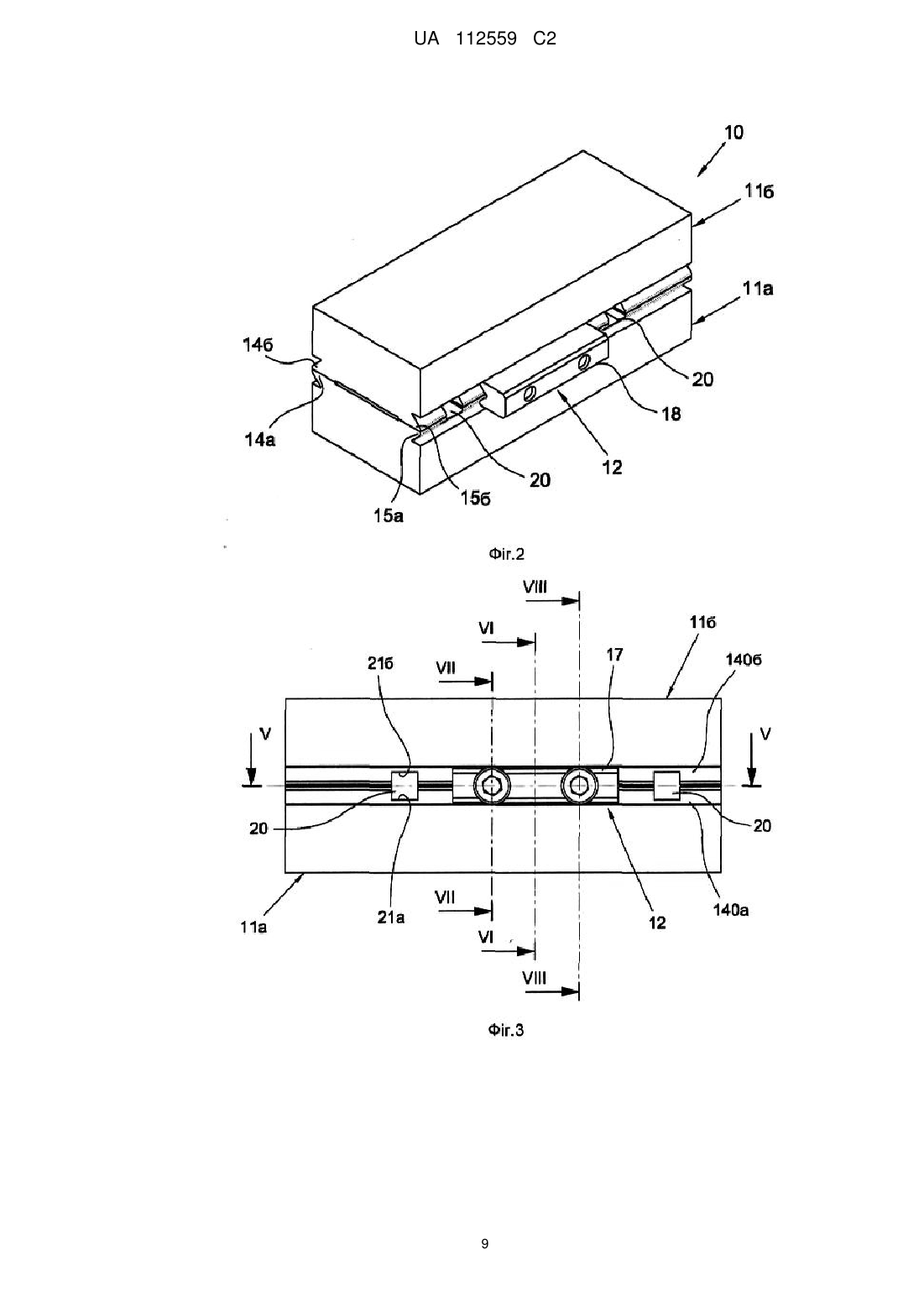
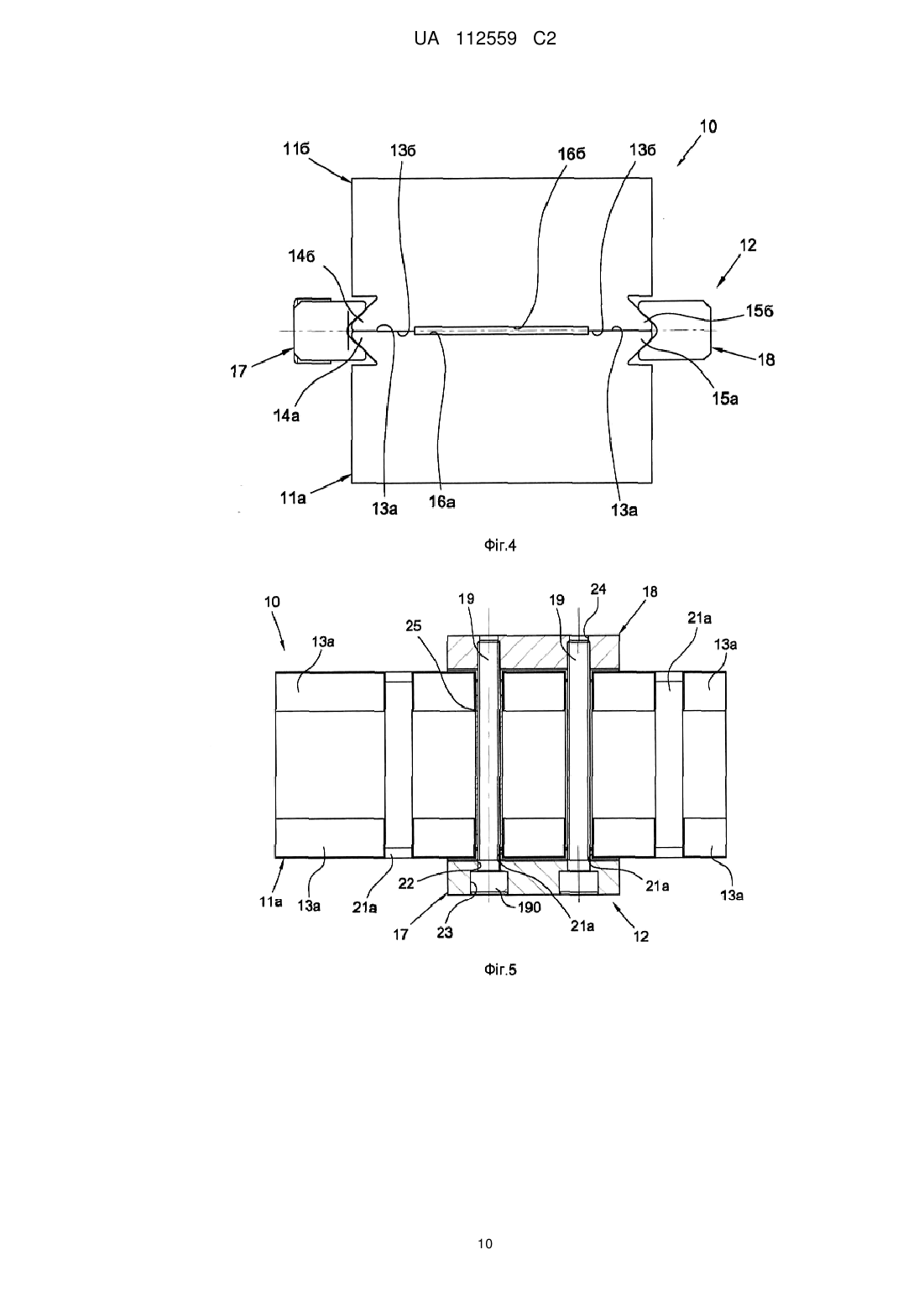
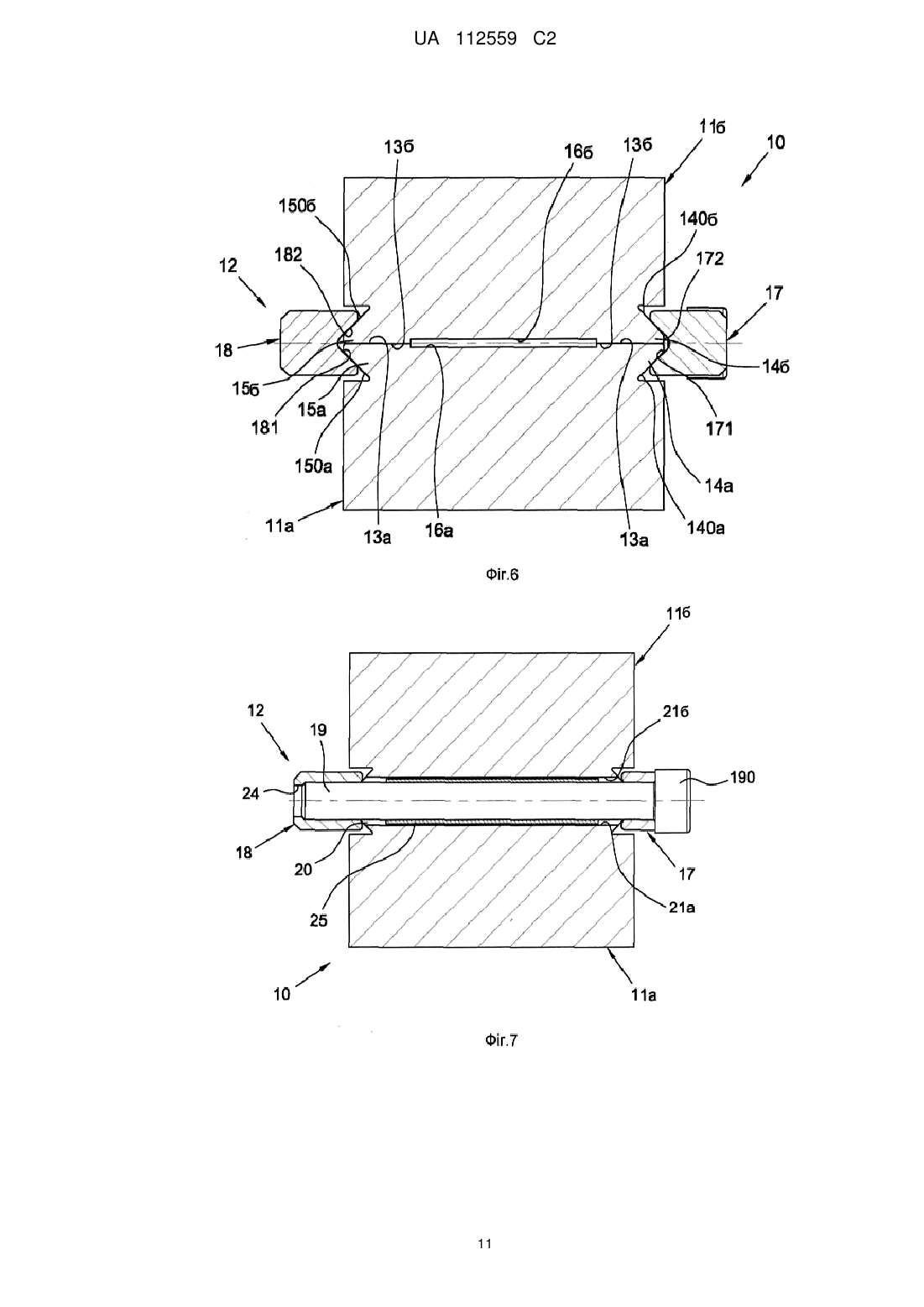
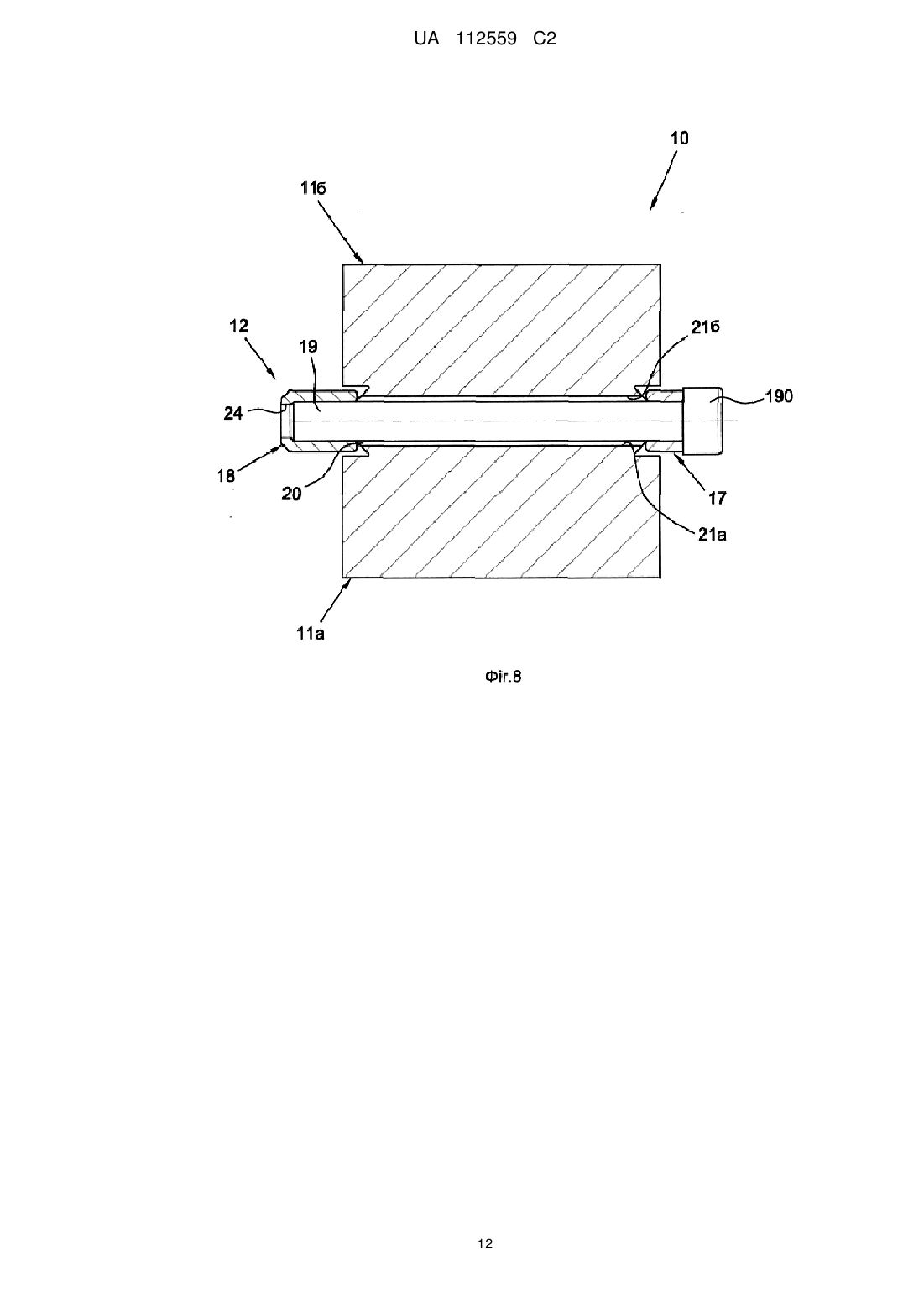
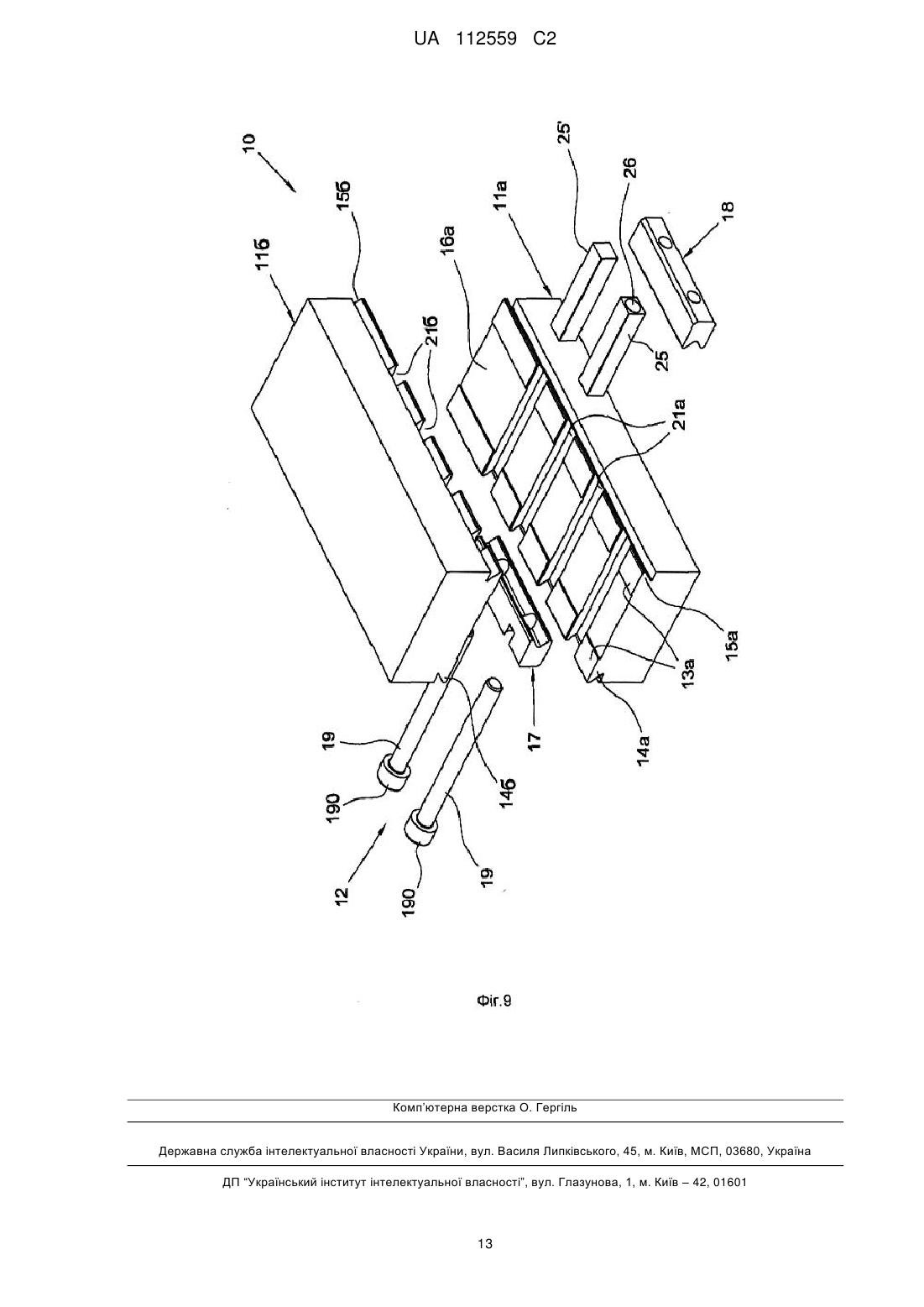
Реферат: З'єднувальний пристрій (10), який має щонайменше два тіла (11а, 11б), зокрема щонайменше два тіла складових частин групи механічної автоматизації рухів, які потрібно з'єднати одне з одним, і групу (12) з'єднання цих двох тіл (11а, 11б) знімно одне до одного, причому кожне з двох тіл має взаємну опорну поверхню (13а, 13б) для спирання одне на одне і профіль (14а, 15а, 14б, 15б) з'єднання з групою (12) з'єднання, визначений щонайменше у двох відповідних двома протилежних периметричних частинах відповідної взаємної опорної поверхні (13а, 13б), і група (12) з'єднання має щонайменше одну пару затискних елементів (17, 18), які можуть входити в зачеплення із з'єднувальними профілями (14а, 15а, 14б, 15б) і які знімно з'єднувані один з одним за допомогою щонайменше одного з'єднувального елемента (19), при цьому з'єднувальний елемент (19) розташовано із зазором у відповідному гнізді (20), що визначене щонайменше однією канавкою (21а, 21б), яка виконана в щонайменше одному із двох тіл (11а, 11б), і яка проходить між відповідними двома протилежними периметричними частинами. UA 112559 C2 (12) UA 112559 C2 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується з'єднального пристрою щонайменше двох тіл складових частин групи механічної автоматизації рухів зі знімною групою з'єднання. Даний винахід також стосується складової частини групи механічної автоматизації рухів, зокрема виконавчого механізму, повзуна, захвату, профільного сортового металу або направляючої рейки або подібних елементів, і до знімної групи з'єднання двох таких складових частин. В цьому описі група механічної автоматизації рухів означає передаточні, перетворюючі та лінійно або обертово рухомі регулюючі складові частини, які з'єднують і комбінують одна з одною для того, щоб мати можливість здійснювати заздалегідь визначений певний ряд рухів за винятком складових частин силового кола, який живить цю групу. Ці складові частини включають, зокрема, пневматичні, гідравлічні або електричні виконавчі механізми, повзуни, захвати, рейки, направляючі рейки або подібні елементи. Групи механічної автоматизації рухів цього типу застосовують, зокрема, в виробничих системах, призначених для обробки, переробки чи складання частин. Це стосується, наприклад, маніпуляторів або так званих маніпуляторів типу "взятипокласти", які виконують в автоматичному режимі піднімання деталі з першого місця, її зміщення і встановлення на інше місце, де вони вивільняють її, можливо змінюючи її просторову орієнтацію. У цих групах механічної автоматизації рухів елементарне переміщення уздовж трьох декартових осей, обертання відносно цих же осей, а також збирання і вивільнення окремих частин здійснюють відповідними лінійними і поворотними виконавчими механізмами і захватами, які комбінують і з'єднують так, щоб отримати бажану серію рухів. Залежно від виробничої системи та від відповідної групи механічної автоматизації рухів, що будуть виконуватися, необхідно вибрати на стадії проектування, тип виконавчих механізмів і/або захватів, які будуть виконувати рухи в залежності від очікуваних навантажень, величини окремих переміщень та доступних просторів, і механічно з'єднати їх один з одним. Якщо потрібно створити маніпулятор типу "взяти-покласти", то можна, виключно як приклад, забезпечити захвати, встановлені на поворотному механізмі, пристосованому, щоб здійснити поворот, який має амплітуду 90° навколо горизонтальної осі, причому, поворотний виконавчий механізм, в свою чергу, встановлюють на повзуні, яким керує лінійний виконавчий механізм, який розташовано на вертикальній осі і, в свою чергу, закріплено на повзуні, яким керує лінійний виконавчий механізм, розташований на горизонтальній осі. Таке розташування дозволяє, наприклад, підняти частину з першого місця, повернути і вертикально та горизонтально перемістити на друге місце розташування, де її вивільнити. Різні складові частини такої групи механічної автоматизації рухів повинні бути з'єднані одна з одною в запланованій послідовності. Традиційно, це з'єднання є знімним і забезпечує використання плит, кронштейнів, косинців і опорних блоків, кожен з яких має ряд різьбових отворів, в яких зачіплюють різьбові елементи, які зафіксовано на окремих складових частинах. "Налагоджувальне" проектування і виробництво кожного окремого з'єднального пристрою в залежності від операційної машини і групи механічної автоматизації рухів, яку буде створено, забирає багато часу і є дорогим, а також обмежує можливість модифікацій і змін. Для того щоб подолати цей недолік, були розроблені різні з'єднувальні системи, які так чи інакше є "нормалізованими" або "стандартизованими" і які дозволяють з'єднання різних складових частин в різних можливих конфігураціях. Перша відома з'єднальна система забезпечує застосування так званих "адаптерів", що складаються з однієї або декількох пластин, які мають різну форму, розташованих між двома складовими частинами, які будуть з'єднані, і за допомогою кріпильних елементів знімного типу кріплять пластини одна до одної і до кожної з двох складових частин, які потрібно з'єднати. Однак при цьому, залежно від типу складових частин, які потрібно з'єднати, і залежно від різних можливостей підключення цих складових частин необхідно мати широкий спектр різних "перехідників". Це в свою чергу тягне за собою ускладнення і ряд витрат, з точки зору часу і вартості, на проектування, виробництво, створення та управління запасами різних видів "перехідників". Крім того, незалежно від того, що є багато типів "перехідників", кількість типів доступних з'єднань в будь-якому випадку обмежена і не забезпечує всі можливі випадки. Друга відома з'єднальна система потребує виготовлення на кожній складовій частині, зокрема на кожному виконавчому механізмі, багатьох різьбових і не різьбових отворів і багатьох прецизійних отворів, що передбачає наявність шаблону для з'єднання або проходження різьбових з'єднувальних елементів і подальше забезпечення з'єднання з установними 1 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 55 штифтами. Розташування, кількість і розмір різьбових і не різьбових отворів і прецизійних отворів однаково повторюють на безлічі типів складових частин (виконавчих механізмів). Ця відома з'єднальна система дозволяє двом складовим частинам, навіть різних типів, безпосереднє з'єднання одна з одною без необхідності вставляти будь-який тип перехідника між ними. Отже, це має ту перевагу, що забезпечує розміри з'єднального пристрою як ціле, і ту перевагу, що забезпечує більшу жорсткість з'єднання між різними складовими частинами. Проте, ця відома з'єднальна система також має межі застосування. Дійсно, з різних технічних причин пристрій, кількість і розміри різьбових і не різьбових і прецизійних отворів не тотожне відтворюються на всіх можливих типах складових частин, тому можуть бути з'єднані разом тільки складові частини типів, що мають різьбові і не різьбові і прецизійні отвори, які є сумісні один з одним по кількості, розташуванню і розмірам. Третя відома з'єднальна система передбачена для отримання частини, що в поперечному перерізі має форму "ластівчиного хвоста", що відповідає щонайменше одній поверхні кожної складової частини. Дві складові частини цього типу з'єднують одна з одною на відповідних частинах ластівчиного хвіста за допомогою пари замикаючих скоб, які з'єднують їх разом за допомогою одного або більше різьбових стрижнів, що стискають ці дві частини, розташовані оберненими і протилежними одна до одної. Кожен з двох затискачів представляє центральну "вставну" частину, яка розташована між двома частинами ластівчиного хвоста, діючи в якості прокладки для двох складових частин, які з'єднують між собою. Різьбові стрижні, що з'єднують два затискачі, розміщені в просторі, створеному між двома складовими частинами, які з'єднують, таким чином забезпечуючи розташування з проміжком один від одного. З'єднальна система такого типу описана, наприклад, в патенті US 5 123 770 на ім'я Montech AG. З'єднальна система цього типу має ту перевагу, що є дуже простою і дозволяє з'єднання різних типів складових частин за умови, що кожна з них оснащена щонайменше частиною ластівчиного хвоста, і при цьому необхідно мати обмежену кількість "перехідників", тобто замикаючих скоб. Крім того, така з'єднальна система дозволяє регулювати, під час стадії складання, відносне положення двох складових частин уздовж поздовжньої осі частин ластівчиного хвоста і простягається перпендикулярно осі, вздовж якої простягаються різьбові стрижні, які з'єднують два затискачі. Проте, ця відома з'єднальна система також має кілька недоліків. Перший недолік полягає в тому, що дві складові частини, з'єднані одна з одною, рознесені одна від одної, що, з одного боку, збільшує розміри з'єднувального пристрою в цілому, а, з іншого боку, зменшує жорсткість з'єднання. Другий недолік полягає в тому, що можливість ковзання уздовж поздовжньої осі частин ластівчиного хвоста може призвести, при застосуванні, до відносних зміщень двох складових частин, що є не бажаним і що викликається, наприклад, вібраціями або надмірним навантаженням. Крім того, в такій з'єднальній системі відсутня будь-яка згадка про відносне положення двох складових частин уздовж поздовжньої осі частин ластівчиного хвоста. У разі ремонту або заміни, що вимагає розбирання і повторного складання двох складових частин, потрібен особливий досвід відповідних операторів для пошуку початкового і правильного відносного положення самих складових частин з використанням вимірювальних інструментів, а також потрібна додаткова витрата часу. З'єднальна система, яка описана в патенті DE 19951452-A1 на ім'я Montech AG, забезпечує подолання цього останнього недоліку. Ця з'єднальна система забезпечує застосування багатьох установних штифтів, кожен з яких має один кінець, вставлений в отвір, який виконано в одному з двох затискачів, і протилежний кінець, вставлений в отвір, виконано у відповідній складовій частині або частині для з'єднання. Однак це рішення є конструктивно складним і вимагає обробку обох кріпильних затискачів і обох складових частин або частин, що повинні бути з'єднані, для виготовлення в них відповідної кількості місць для вставки установних штифтів. Крім того, це рішення також має таки ж недоліки, що зазначені в посиланні на патент US 5 123 770, що стосується розмірів і жорсткості з'єднального пристрою в цілому. Відомий також (див. патентну заявку Франції 2 584 115) з'єднальний пристрій двох заздалегідь приготовлених панелей з допомогою двох затискних колодок, розташованих на обох боках двох вертикально розташованих панелей. Обидві затискні колодки розташовано 2 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 55 60 поперек поверхні стику двох луток, або одвірків, і притиснуто до них з допомогою притискного засобу, який простягається крізь товщу цих луток, або одвірків, на рівні поверхні стику. З'єднальна система цього типу є простою, але вона не дозволяє регулювати, під час стадії складання, відносне положення двох складових частин. Метою даного винаходу є подолання недоліків відомого рівня техніки. В межах цієї загальної мети однією конкретною метою цього винаходу є створення з'єднального пристрою щонайменше двох тіл складових частин групи механічної автоматизації рухів, який є компактним і має розміри, які забезпечують досягнення більш високої жорсткості з'єднання. Іншою метою даного винаходу є створення з'єднального пристрою щонайменше двох тіл складових частин групи механічної автоматизації рухів зі знімною групою з'єднання, який дозволяє відносне визначення і відтворення положення двох тіл, які будуть з'єднані разом, стає можливим виконувати наступні операції розбирання і збирання двох тіл легко і точно. Ще однією метою цього винаходу є створення з'єднального пристрою щонайменше двох тіл складових частин групи механічної автоматизації рухів зі знімною групою з'єднання, який є структурно і конструктивно простим. Ще однією метою даного винаходу є створення складових частин для виробництва групи механічної автоматизації рухів виконавчого механізму, повзуна, захватів, рейок, направляючих рейок і подібних елементів і знімної групи з'єднання зазначених складових частин, яка є модульною і "нормалізованою", що забезпечує комбінування і збирання для створення бажаної групи автоматизації рухів простим способом. Додатковою метою даного винаходу є створення пристрою з'єднання щонайменше двох тіл складових частин групи механічної автоматизації рухів зі знімною групою з'єднання, яка є особливо простою і функціональною та невисокої вартості. Ці цілі згідно з винаходом досягаються шляхом створення з'єднального пристрою для з'єднання щонайменше двох тіл складових частин групи механічної автоматизації рухів із знімною групою з'єднання, відповідно до п. 1 формули винаходу. Ці цілі досягаються також шляхом створення складових частин групи механічної автоматизації рухів і знімної групи з'єднання відповідно до пунктів 10 і 15 формули винаходу. Додаткові ознаки вказано в залежних пунктах формули винаходу. Характеристики та переваги з'єднального пристрою для з'єднання щонайменше двох тіл складових частин групи механічної автоматизації рухів із знімною групою з'єднання відповідно до цього винаходу стануть більш ясними з наступного ілюстрованого опису, що не обмежує винахід, з посиланням на додані креслення, де: на фіг. 1 показано аксонометричний вигляд у розібраному стані з'єднального пристрою відповідно до винаходу; на фіг. 2 показано аксонометричний вигляд з'єднального пристрою, показаного на фіг. 1, в зібраному стані; на фіг. 3 показано вид спереду з'єднального пристрою, зображеного на фіг. 2; на фіг. 4 показано вид збоку з'єднального пристрою, зображеного на фіг. 2; на фіг. 5 показано поперечний переріз V-V, зображений на фіг. 3; на фіг. 6 показано поперечний переріз VІ-VІ, зображений на фіг. 3; на фіг. 7 показаний поперечний переріз VІІ-VІІ, зображений на фіг. 3; на фіг. 8 показаний поперечний переріз VІІІ-VІІІ, зображений на фіг. 3; на фіг. 9 показано аксонометричний вигляд у розібраному стані альтернативного з'єднального пристрою відповідно до даного винаходу. Як зображено на кресленнях, з'єднальний пристрій 10 містить щонайменше два тіла 11а і 11б для з'єднання одне з одним і групу 12 з'єднання цих двох тіл 11а і 11б одне з одним з можливістю роз'єднання. Два тіла 11а і 11б є тілами складових частин групи механічної автоматизації рухів, зокрема складовими частинами для передачі, перетворення і регулювання рухів, які є лінійними, поворотними або їх комбінацією, за винятком складових частин силового кола, цю групу. Два тіла 11а і 11б, наприклад, можуть бути тілами лінійних або поворотних виконавчих механізмів пневматичного, гідравлічного або електричного типу, захватів, повзунів, рейок, направляючих рейок і подібних елементів. Слід зазначити, що на доданих кресленнях два тіла 11а і 11б схематично показано тільки у вигляді їх частин, які є невід'ємною частиною даного винаходу. Додатково, стосовно характеристик даного винаходу, два тіла 11а і 11б мають модульну і "нормалізовану" конструкцію, тому відповідні елементи позначено однаковими позиціями, але індексовано буквами "а" і "б". 3 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 55 60 Кожне з цих двох тіл 11а, 11б має взаємну опорну поверхню 13a, 13б для спирання одне на одне і, відповідно щонайменше дві протилежні периметричні частини відповідної поверхні 13а, 13б, і відповідний з'єднальний профіль 14а, 15а і 14б, 15б для з'єднання з групою 12 з'єднання. Поверхні 13a, 13б є плоскими і підігнані одна до одної вздовж щонайменше одного розміру D. З'єднальні профілі 14а, 15а і 14б, 15б простягаються вздовж відповідного контуру, що перетинає розмір D. У представленому найбільш переважному втіленні з'єднальні профілі 14а, 15а, і 14б, 15б простягаються вздовж відповідної прямої лінії, яка простягаються під прямим кутом до розміру D. Більш детально, поверхні 13a, 13б визначають відповідно щонайменше одну грань відповідного тіла 11а, 11б. Кожна з двох поверхонь13а, 13б має взагалі прямокутну форму, розмір D якої є шириною. З'єднальні профілі 14а, 15а і 14б, 15б визначені вздовж протилежних боків поверхонь 13а, 13б і простягаються на щонайменше частині їх довжини L. Кожна з двох поверхонь 13а, 13б визначається парою плоских виступів, що мають прямокутну форму, простягаються паралельно поздовжній частині відповідного тіла 11а, 11б і рознесені одна від одної з допомогою пониженої частини 16а, 16б. Така будова взаємних опорних поверхонь 13а, 13б дозволяє спирання двох тіл 11а, 11б, що буде отримане без деформацій, викликаних недостатньою площинністю цих поверхонь після стиснення групою 12 з'єднання. В цьому випадку розмір D визначають сумою ширин двох виступаючих площин, які визначають кожну з двох поверхонь 13a, 13б. Крім того, як стане більш зрозумілим з нижченаведеного опису, поверхні 13а, 13б, а також з'єднальні профілі 14а, 15а і 14б, 15б є переривчастими і розділеними на сегменти, тому що перериваються однією або більше поперечними канавками. Кожен з'єднальний профіль 14а, 15а і 14б, 15б складається з нахиленої стінки 140a, 150a і 140б, 150б, яка простягається від відповідного зовнішнього периметричного краю відповідної поверхні 13а, 13b і утворює гострий кут з останньою. Два з'єднальні профілі 14а, 15а і 14б, 15б і відповідна поверхня 13a, 13b визначають частину у формі ластівчиного хвоста у відповідному тілі 11а, 11б. Група 12 з'єднання містить щонайменше одну пару затискних елементів 17 і 18, які можуть зачеплюватися з відповідними з'єднальними профілями 14а, 14б і 15а, 15б двох тіл 11а, 11б, які взаємно покривають одне одного. Затискні елементи 17 і 18 є знімно з'єднуваними один з одним з допомогою одного або більше з'єднальних елементів, кожен з яких має різьбовий стрижень 19. У відповідності з особливою характеристикою даного винаходу, кожен різьбовий стрижень 19 розташовано із зазором у відповідному отворі 20, визначеному щонайменше однією канавкою 21а, 21б в щонайменше одному з двох тіл 11a, 11б, яка простягається між відповідними протилежними периметричними частинами, де знаходяться з'єднальні профілі 14а, 15а і 14б, 15б. Більш докладно, кожне тіло 11а, 11б містить одну або більше канавок 21а, 21б, які простягаються паралельно розміру D і, отже, під прямим кутом до з'єднальних профілів 14а, 15а і 14б, 15б, і які є відкритими до відповідних взаємних опорних поверхонь 13a, 13б. Канавки 21а, 21б рознесено одна від одної на заздалегідь визначену відстань; переважно канавки 21а, 21б знаходяться на однаковій відстані одна від одної. Враховуючи, що два тіла 11а, 11б заходяться в стані з'єднання, коли поверхні 13а і 13б спираються безпосередньо одна на одну, то одна або більше канавок 21а, 21б одного з двох тіл 11а, 11б стоїть навпроти відповідної канавки 21б, 21а іншого тіла 11б, 11а, утворюючи відповідний отвір 20, в якому може бути розміщений різьбовий стрижень 19. Кожний з двох затискних елементів 17 і 18 має пару плоских внутрішніх поверхонь, відповідно 171, 172 і 181, 182, що сходяться одна з одною і з'єднані з утворенням V, U подібної, або т. п., форми без розміщенням між ними будь-якої частини, призначеної діяти в якості прокладки двох тіл 11а, 11б для з'єднання. Коли два тіла 11а, 11б в стані з'єднання, тобто поверхні 13а і 13б спираються безпосередньо одна на одну, то внутрішні поверхні 171, 172 і 181, 182 двох затискних елементів 17 і 18 спираються на нахилені стінки 140a, 140б і 150a, 150б, тобто на з'єднальні профілі 14а, 14б і 15а, 15б відповідно двох взаємно перекриваючих тіл 11а, 11б. У варіанті, показаному на доданих кресленнях, кожен різьбовий стрижень 19 має головку 190 на одному кінці. 4 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 55 Кожен з двох затискних елементів 17 і 18 простягається поздовжньо і має один або більше отворів для проходу і/або з'єднання з відповідним різьбовим стриженем 19. Зокрема, один з двох затискних елементів, в даному випадку затискний елемент 17, має один або більше наскрізних отворів 22, кожний з яких має розширення в нижньому місці 23, у яке впирається головка 190 відповідного різьбового стрижня 19. Інший з двох затискних елементів, в даному випадку затискний елемент 18, має один або більше різьбових отворів 24, в які вкручено протилежний кінець відповідного різьбового стрижня 19. Так що є можливість затягнути чи послабити два затискні елементи 17 і 18 з допомогою різьбових стрижнів 19. Відповідно до додаткової ознаки даного винаходу, група 12 з'єднання додатково має одну або більше втулку 25, які знімно можна вставляти в канавки 21а, 21б двох тіл 11а, 11б. В одному варіанті втулки 25 мають наскрізні осьові отвори 26 для проходу в них різьбових стрижнів 19. Тому, в цьому випадку, втулки 25 можуть бути вставлені в ті самі отвори 20 для розміщення різьбових стрижнів 19 (фігури 1-7). Крім того, можна виготовити втулки 25' цілісними, і в цьому випадку їх розміщено в канавках 21а, 21б інших, ніж ті, що утворюють отвори 20 для розміщення різьбових стрижнів 19. Обидві втулки 25, 25' діють як елементи, що визначають відносне положення двох тіл 11а, 11б вздовж напрямку довжини L, і як додаткові блокуючі елементи для запобігання відносному ковзанню двох тіл 11а, 11б уздовж того самого напрямку. Об'єктом даного винаходу є також складова частина групи механічної автоматизації рухів, наприклад, виконавчий механізм лінійного або поворотного типу, повзун, захвати, рейки, направляючі рейки або подібне, яка має тіло 11а, 11б, описане вище з посиланням на додані креслення. Очевидно, що ці складові частини можуть бути з'єднані одна з одною групами з'єднання відомого типу, наприклад, описаними в патенті US 5 123 770, без відповідних взаємних опорних поверхонь 13a, 13б, що і спираються одна на одну. Об'єктом даного винаходу також є група 12 з'єднання для складових частин групи механічної автоматизації рухів, описана вище з посиланням на додані креслення. Робота обладнання за винаходом, зокрема етапи монтажу і демонтажу з'єднального пристрою 10, стануть зрозумілі фахівцю в цій галузі з наведеного вище опису та з доданих креслень. За будь-якого розташування одного або декількох втулок 25 та/або 25' у відповідній одній або більше канавках 21а, 21б два тіла 11а, 11б розташовуються поруч одне з одним так, що поверхні 13а, 13б взаємно спираються одна на одну і збігаються одна з одною щонайменше вздовж розміру D, так що з'єднальні профілі 14а, 15а і 14б, 15б відповідних частин ластівчиного хвоста накладаються один на один, а канавки 21a, 21б, звернені одна до іншої, визначають отвори 20. Дві затискні елементи 17 і 18 розташовують майже один біля одного на парі з'єднальних профілів 14а, 14б і 15а, 15б, які взаємно перекриваються, і з'єднують з допомогою одного або більше різьбових стрижнів 19. Різьбові стрижні 19 розміщують в отворі 20 та/або в наскрізному осьовому отворі 26 будьякої втулки 25. І отвори 20, і наскрізні отвори 26 втулок 25 виконано таких розмірів, що різьбові стрижні 19 розташовуються в них із зазором, тобто без наявності прямого контакту між цими елементами. Слід зазначити особливо, що в зібраному і з'єднаному стані два тіла 11а і 11б знаходиться у безпосередньому контакті одне з одним відповідними взаємними опорними поверхнями 13а, 13б без будь-якої вставки або прокладки, вставленої між цими поверхнями. Це дозволяє і витримувати розміри з'єднального пристрою 10, якщо розглядати його в цілому, і збільшити жорсткість з'єднання. Присутність втулок 25, 25' дозволяє забезпечити створення потрібного відносного положення двох тіл 11а, 11б, які тому можуть бути розібрані і знову зібрані при тому ж просторовому розташуванні простим і швидким способом. Крім того, будь-які втулки 25, 25' діють як додаткові елементи блокування і забезпечення жорсткості з'єднання двох тіл 11а, 11б, що особливо потрібно для запобігання ковзанню і зміщень двох тіл 11а, 11б вздовж напрямку L за надмірних навантажень та/або вібрацій. З'єднальний пристрій за винаходом має ту перевагу, що є дуже компактним, має невеликі розміри і дозволяє отримати більш жорстке з'єднання. 5 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 55 60 Він також дозволяє визначити і повторно відтворити відносне положення двох тіл, з'єднаних разом, забезпечуючи проведення наступних операції розбірки і повторної збірки двох тіл легко і точно. Складові частини для виробництва групи механічної автоматизації рухів за винаходом, а також знімна група з'єднання цих складових частин за винаходом є структурно і конструктивно простими, а з точки зору характеристик їх з'єднання то вони можуть бути легко "стандартизовані" і "нормалізовані" у вигляді модулів, які можна комбінувати і збирати між собою, щоб забезпечити бажану групу автоматизації рухів. Такий з'єднальний пристрій, в будь-якому випадку, може мати численні модифікації і варіанти, що відповідають винаходу; крім того, всі деталі можуть бути замінені технічно еквівалентними елементами. Наприклад, взаємні опорні поверхні двох тіл можуть мати форму не двох виступів, а можуть безперервно простягатися між двома послідовними канавками; з'єднальний елемент двох затискних елементів може бути приєднано до них з допомогою гайок; форма, і зокрема поперечний переріз канавок, отворів, які вони визначають, і втулок можуть відрізнятися від представлених на доданих кресленнях. На практиці будь-якими матеріалами і будь-якими розмірами можливо користуватись залежно від технічних умов. ФОРМУЛА ВИНАХОДУ 1. З’єднувальний пристрій (10), який має щонайменше два тіла (11а, 11б) складових частин групи механічної автоматизації рухів, які потрібно з'єднати одне з одним, і групу (12) з'єднання щонайменше двох тіл (11а, 11б) одне з одним з можливістю роз'єднання, який відрізняється тим, що кожне з двох тіл має: взаємно опорну поверхню (13а, 13б) для взаємного опирання поверхні одного тіла на поверхню другого, з′єднувальний профіль (14а, 15а, 14б, 15б) для з'єднання з групою (12) з'єднання, визначений щонайменше у двох відповідних протилежних периметричних частинах відповідної взаємно опорної поверхні (13а, 13б), і щонайменше одну канавку (21а, 21б), виконану у взаємно опорній поверхні (13а, 13б) і таку, що простягається між відповідними двома протилежними периметричними частинами, причому у з'єднаному стані щонайменше одна канавка (21а, 21б) одного з двох тіл (11а, 11б) є оберненою до щонайменше однієї канавки (21а, 21б) другого з двох тіл (11а, 11б) з утворенням отвору (20), і тим, що група (12) з'єднання має щонайменше одну пару затискних елементів (17, 18), виконаних з можливістю зачеплення із з'єднувальними профілями (14а, 15а, 14б, 15б) і знімного з'єднування один з одним за допомогою щонайменше одного з'єднувального елемента (19), причому з′єднувальний елемент (19) розташовано із зазором у відповідному отворі (20), та щонайменше одну втулку (25, 25'), виконану з можливістю знімного уведення в щонайменше одну канавку (21а, 21б) кожного із щонайменше двох тіл (11а, 11б). 2. Пристрій (10) за п. 1, який відрізняється тим, що взаємно опорні поверхні (13а, 13б) щонайменше двох тіл (11а, 11б) збігаються одна з одною по щонайменше одному розміру (D). 3. Пристрій (10) за п. 2, який відрізняється тим, що протилежні периметричні частини кожної із взаємно опорних поверхонь (13а, 13б) простягаються вздовж відповідної лінії, яка стосується зазначеного розміру. 4. Пристрій (10) за п. 3, який відрізняється тим, що лінії, вздовж яких простягаються протилежні периметричні частини кожної із взаємно опорних поверхонь (13а, 13б), суть прямими лініями, паралельними одна одній, і простягаються під прямим кутом до розміру (D). 5. Пристрій (10) за будь-яким з пп. 2-4, який відрізняється тим, що щонайменше одна канавка (21а, 21б) простягається паралельно розміру (D). 6. Пристрій (10) забудь-яким з попередніх пунктів, який відрізняється тим, що кожне з двох тіл (11а, 11б) має декілька канавок (21а, 21б), розташованих паралельно одна одній і на певній відстані одна від одної, причому у з'єднаному стані щонайменше частину канавок (21а, 21б) одного з двох тіл (11а, 11б) обернено до щонайменше відповідної частини канавок (21а, 21б) іншого з двох тіл (11а, 11б) для утворення множини отворів (20). 7. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що щонайменше одна втулка (25) має наскрізний осьовий отвір (26) для проходження в ньому щонайменше одного з'єднувального елемента (19). 6 UA 112559 C2 5 10 15 20 25 30 35 40 45 50 8. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що кожен затискний елемент (17, 18) щонайменше однієї пари затискних елементів має пару плоских внутрішніх поверхонь (171, 172, 181, 182), що сходяться одна з одною V-подібним чином і тим, що кожний із з'єднувальних профілів (14а, 14б, 15а, 15б) кожного з тіл (11а, 11б) має нахилену плоску стінку (140а, 140б, 150а, 150б), що простягається від відповідної взаємно опорної поверхні (13а, 13б), утворюючи гострий кут з нею, причому в з'єднаному стані внутрішні поверхні (171, 172, 181, 182) кожного затискного елемента (17, 18) щонайменше однієї пари затискних елементів спираються на нахилені плоскі стінки (140а, 140б, 150а, 150б) щонайменше двох тіл (11а, 11б), а взаємно опорні поверхні (13а, 13б) щонайменше двох тіл (11а, 11б) спираються одна на одну. 9. Пристрій (10) за будь-яким з попередніх пунктів, який відрізняється тим, що щонайменше один з'єднувальний елемент (19) складається з різьбового стрижня, протилежні кінці якого виконано з можливістю з'єднання із затискними елементами (17, 18) щонайменше однієї пари затискних елементів. 10. Складова частина групи механічної автоматизації рухів, зокрема виконавчий механізм, повзун, захват, профільний сортовий метал або направляючі рейки, яка відрізняється тим, що має тіло (11а, 11б) з опорною поверхнею (13а, 13б), яка спирається на відповідну опорну поверхню (13а, 13б) тіла (11а, 11б) іншої складової частини, з'єднувальний профіль (14а, 15а, 14б, 15б) з групою (12) з'єднання, визначеною у відповідності до щонайменше двох протилежних периметричних частин опорної поверхні (13а, 13б), причому група (12) з'єднання має щонайменше одну пару затискних елементів (17, 18), які рознімно з'єднані один з одним щонайменше одним з'єднувальним елементом (19) і щонайменше однією втулкою (25, 25'), та щонайменше одну канавку (21а, 21б), виконану у взаємно опорній поверхні (13а, 13б) і яка простягається між двома протилежними периметричними частинами для розташування з зазором з'єднувального елемента (19) та/або щонайменше однієї втулки (25, 25'). 11. Складова частина за п. 10, яка відрізняється тим, що протилежні периметричні частини опорної поверхні (13а, 13б) простягаються уздовж відповідної прямої лінії, причому лінії, вздовж яких протилежні периметричні частини простягаються, суть паралельними одна одній і простягаються під прямим кутом до розміру (D) опорної поверхні. 12. Складова частина за п. 11, яка відрізняється тим, що щонайменше одна канавка (21а, 21б) простягається паралельно розміру (D). 13. Складова частина за будь-яким з пп. 10-12, яка відрізняється тим, що тіло (11а, 11б) має декілька канавок (21а, 21б), розташованих паралельно одна одній і на певній відстані одна від одної. 14. Складова частина за будь-яким з пп. 10-13, яка відрізняється тим, що кожний із з'єднувальних профілів (14а, 15а, 14б, 15б) має нахилену плоску стінку (140а, 150а, 140б, 150б), яка простягається від відповідної опорної поверхні (13а, 13б), утворюючи гострий кут з нею. 15. Знімна група (12) з'єднання щонайменше двох тіл (11а, 11б) складових частин групи механічної автоматизації рухів за будь-яким з пп. 10-14, яка має щонайменше одну пару затискних елементів (17, 18), виконаних з можливістю з'єднання із відповідними з'єднувальними профілями (14а, 15а, 14б, 15б) щонайменше двох тіл (11а, 11б) і рознімного з'єднання один з одним за допомогою щонайменше одного з'єднувального елемента (19), яка відрізняється тим, що кожний затискний елемент (17, 18) щонайменше однієї пари затискних елементів має пару плоских внутрішніх поверхонь (171, 172, 181, 182), що сходяться одна з одною V-подібним чином з можливістю зачеплення в опорному положенні на з'єднувальних профілях (14а, 15а, 14б, 15б), причому з'єднувальний елемент (19) виконано з можливістю його уведення в отвір (20), визначений щонайменше однією канавкою (21а, 21б) двох тіл (11а, 11б), і тим, що має щонайменше одну втулку (25, 25'), виконану з можливістю знімного уведення в щонайменше одну канавку (21а, 21б) кожного із щонайменше двох тіл (11а, 11б). 16. Група (12) з'єднання за п. 15, яка відрізняється тим, що щонайменше одна втулка (25) має наскрізний осьовий отвір (26) для проходження в ньому щонайменше одного з'єднувального елемента (19). 7 UA 112559 C2 8 UA 112559 C2 9 UA 112559 C2 10 UA 112559 C2 11 UA 112559 C2 12 UA 112559 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
Автори англійськоюTamiozzo, Corrado
Автори російськоюТамиоццо Коррадо
МПК / Мітки
Мітки: групи, пристрій, щонайменше, знімною, з'єднання, зокрема, рухів, групою, складових, з'єднувальний, автоматизації, частин, тіл, двох, механічної
Код посилання
<a href="https://ua.patents.su/15-112559-zehdnuvalnijj-pristrijj-shhonajjmenshe-dvokh-til-zokrema-shhonajjmenshe-dvokh-til-skladovikh-chastin-grupi-mekhanichno-avtomatizaci-rukhiv-zi-znimnoyu-grupoyu-zehdnannya.html" target="_blank" rel="follow" title="База патентів України">З’єднувальний пристрій, щонайменше двох тіл, зокрема щонайменше двох тіл складових частин групи механічної автоматизації рухів зі знімною групою з’єднання</a>
Пристрій та спосіб з’єднання складових частин курильних виробів
Номер патенту: 101871
Опубліковано: 13.05.2013
Автори: Луве Алєксіс, Талльє Бернар
МПК: A24D 3/02, A24F 47/00
Мітки: з'єднання, виробів, пристрій, складових, курильних, частин, спосіб
Формула / Реферат:
1. Спосіб з'єднання двох або декількох різних складових частин для виготовлення курильних виробів, у яких щонайменше одну зі складових частин неможливо чисто розрізати, який включає такі операції:подавання потоку складових частин, спрямованого вздовж рухомого тракту транспортування (209);компонування з потоку складових частин груп з двох або декількох різних складових частин, причому кожна група відповідає окремому курильному...
Пакети, що складаються щонайменше з двох комплектів одиниць товарів, засіб, спосіб і пристрій для виготовлення пакетів
Номер патенту: 51760
Опубліковано: 16.12.2002
Автори: Омдаль Б'ярне, Коккешвольд Тур, Єнсен Єнс Бейлегор, Гундерсен Гейр Віктор, Естергор Бент
МПК: B65D 71/02, B63B 27/00, B66C 1/12
Мітки: одиниць, щонайменше, складаються, засіб, виготовлення, пакетів, двох, товарів, спосіб, пакети, пристрій, комплектів
Формула / Реферат:
1. Пакет, що містить щонайменше одну пару стосів (А, В) одиниць товарів, охоплених саме навантажувальним стропом, що затискається, який містить центральну петлю підвіски (14), що простирається нагору між стосами (А, В) і крізь центральний отвір у верхній частині стропа, який відрізняється тим, що строп має форму замкнутої петлі стрічки (2), ширина якої, власне кажучи, дорівнює ширині в поперечному напрямку стосів (А, В), а також тим, що...
Спосіб безперервного відділення біонафти і її складових частин від газового потоку, що утворюється в процесах швидкого піролізу/термолізу, та пристрій для його здійснення
Номер патенту: 81189
Опубліковано: 10.12.2007
Автори: Радлєн Десмонд Ст.А.Г., Яварі Голам Х., Джонсон Варен Л.
МПК: B01D 45/16, B01D 53/24, B01D 5/00
Мітки: складових, безперервного, відділення, швидкого, утворюється, біонафти, процесах, газового, потоку, здійснення, частин, спосіб, пристрій
Формула / Реферат:
1. Спосіб безперервного відділення біонафти і її складових частин від газового потоку, що утворюється в процесах швидкого піролізу/термолізу, у зручній формі у вигляді рідини, з одержанням газу, що не конденсується та вільного від забруднюючих домішок, який відрізняється тим, що включає відділення біонафти і її складових частин від газового потоку шляхом гарячої інерційної сепарації за такої температури біонафти, за якої в'язкі й/або густі...
Система місткостей для щонайменше двох речовин
Номер патенту: 7526
Опубліковано: 15.06.2005
Автор: Підборецький Олександр Сергійович
МПК: B65D 25/04
Мітки: двох, система, щонайменше, речовин, місткостей
Формула / Реферат:
1. Система місткостей для щонайменше двох речовин, кожна з яких містить трубчастий корпус з донним та вхідним краєм, останній з яких закритий кришкою, і принаймні одна з них - клапан, виконаний у формі диска та суцільної периферичної закраїни, що знаходиться усередині місткості і герметично закриває корпус, яка відрізняється тим, що клапан розташований на донному краї корпусу принаймні однієї з місткостей, внутрішня поверхня периферичної...
Пристрій для центрування двох профільних заготовок, зокрема рейок, в машині для контактного стикового зварювання
Номер патенту: 46040
Опубліковано: 15.05.2002
Автори: Богорський Михайло Володимирович, Кучук-Яценко Сергій Іванович, Грабчев Борис Леонідович, Кривонос Вадим Петрович
МПК: B23K 11/04
Мітки: центрування, зокрема, контактного, машини, стикового, пристрій, заготовок, рейок, профільних, зварювання, двох
Формула / Реферат:
Пристрій для центрування двох профільних заготовок, зокрема рейок, в машині для контактного стикового зварювання, який містить в собі механізм коректування положення зварюваних заготовок, два датчики, які вимірюють відстань від спільної бази до суміщуваних поверхонь зварюваних заготовок у зоні стикування торців, а також послідовно з'єднані диференціальний підсилювач та формувач сигналу непогодження, при цьому входи диференціального...
Попередній патент: Похідні дигідробензооксазину та дигідропіридооксазину
Наступний патент: Пристрій для утворення аерозолю та спосіб видалення курильного виробу з пристрою для утворення аерозолю
Випадковий патент: Спосіб фільтраційного сушіння сипких матеріалів