Контактний модуль
Номер патенту: 81163
Опубліковано: 25.06.2013

Формула / Реферат
1. Контактний модуль, що містить циліндричний корпус, кришку, канали подачі запиленого і відведення очищеного потоків, елементи забезпечення плівкової течії поглинаючої рідини, який відрізняється тим, що він оснащений контактним вузлом у вигляді гвинтового зкривленого висхідного проточного каналу з осьовим входом та радіальним виходом запиленого потоку до контактної зони з рідиною.
2. Контактний модуль за п. 1, який відрізняється тим, що загальна площа каналу для входу ротаційного потоку на (10-15) %, а вихідного каналу в місці контакту з рідиною на (5-6) % перевищує площу поперечного перерізу проточної частини вихідного патрубка вихрового пиловловлювача, до якого він приєднується.
3. Контактний модуль за п. 1, який відрізняється тим, що проточний канал для руху ротаційного потоку має різну шорсткість поверхонь стінок, при цьому внутрішня поверхня, до якої під дією відцентрових сил відбиваються частинки, має більшу шорсткість.
Текст
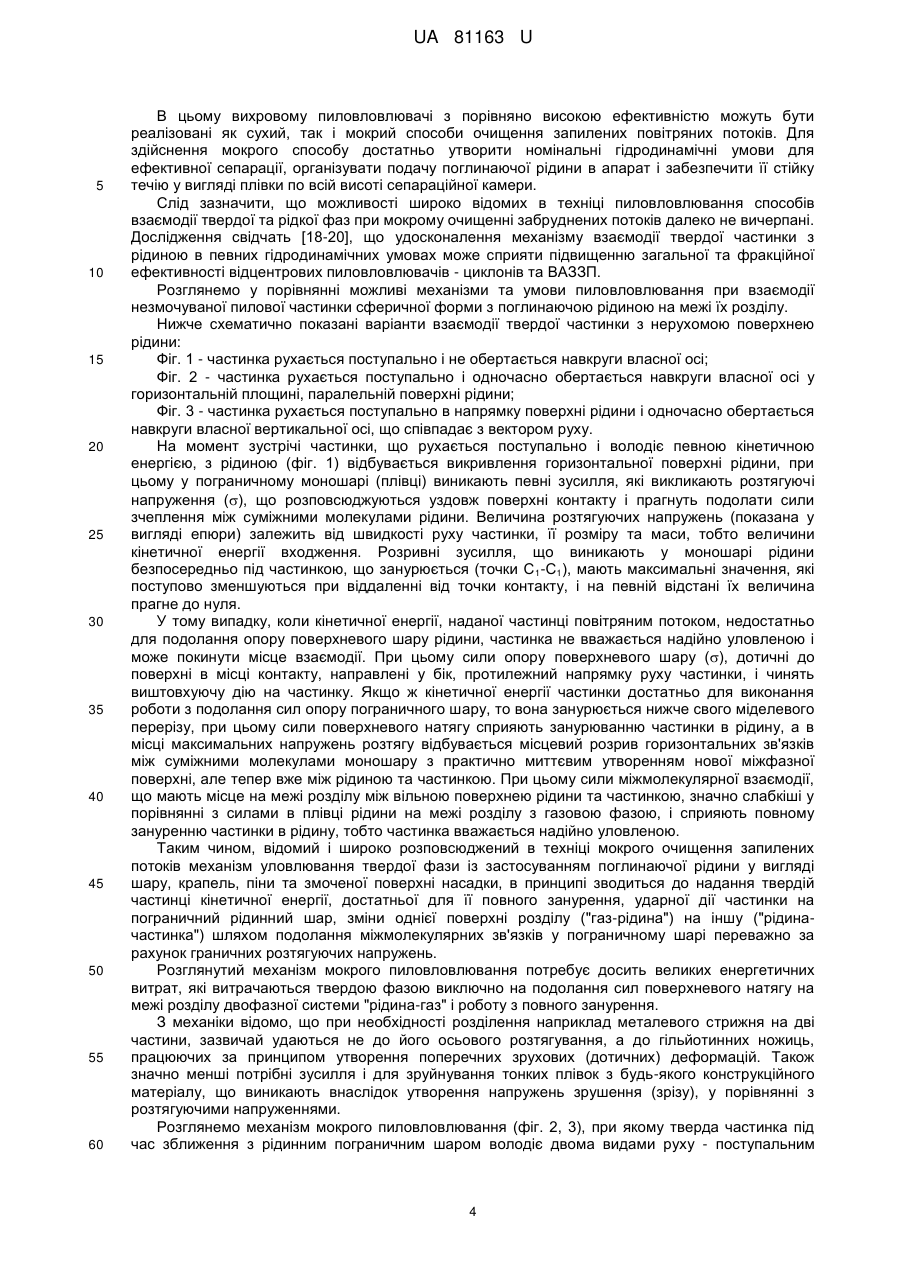
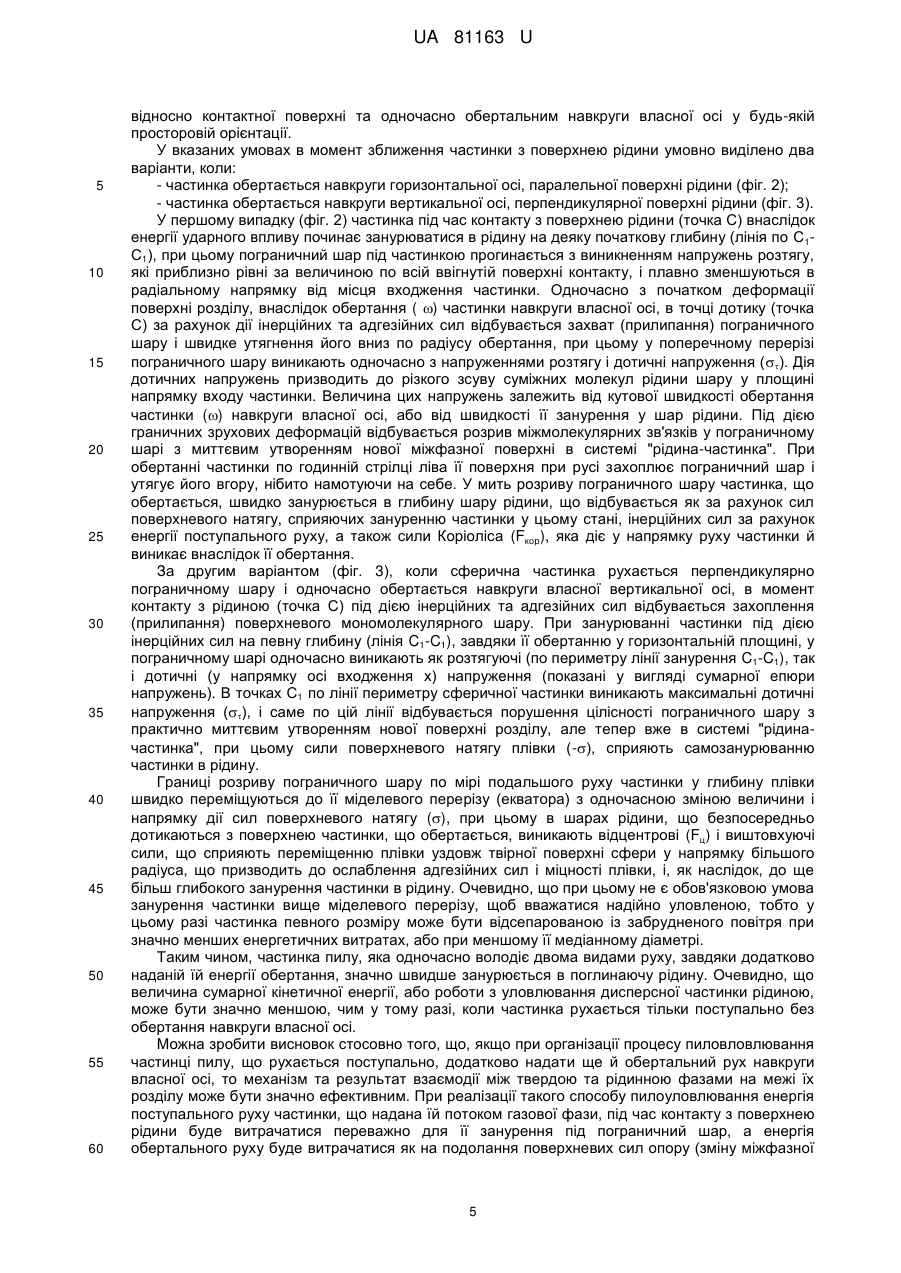
Реферат: Контактний модуль містить циліндричний корпус, кришку, канали подачі запиленого і відведення очищеного потоків, елементи забезпечення плівкової течії поглинаючої рідини. Він оснащений контактним вузлом у вигляді гвинтового скривленого висхідного проточного каналу з осьовим входом та радіальним виходом запиленого потоку до контактної зони з рідиною. UA 81163 U (54) КОНТАКТНИЙ МОДУЛЬ UA 81163 U UA 81163 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки пиловловлювання, зокрема до пристроїв з осадження твердих частинок на рідинній плівці, і може бути використана в хімічній, нафтохімічній, металургійній, харчовій галузях промисловості, а також на підприємствах будівельних матеріалів. Задачею корисної моделі є підвищення ефективності пиловловлювання за рахунок інтенсифікації процесу осадження твердих частинок на рідинній плівці. Відомі [1, 2, 9] основні механізми взаємодії між твердими частинками та рідиною при пиловловлюванні: гравітаційний, інерційний, зачеплення, ударний, ударно-інерційний, під дією відцентрових сил й інші. В сучасних конструкціях мокрих пиловловлювачів сепарація частинок здійснюється під дією декількох механізмів осадження одночасно, але завжди можна виділити превалюючий спосіб, що власне й визначає концепцію пиловловлювача. Ефективність очищення запилених потоків від твердих забруднень в сучасних пиловловлюючих апаратах залежить від багатьох чинників, з яких можна виділити визначні: гідродинаміка (перепускна спроможність з забрудненого повітря, кількість потоків, що взаємодіють, їх швидкості та напрями дії, механізм взаємодії твердої фази з рідиною); характеристика твердої (дисперсність частинок, щільність матеріалу, концентрація і форма частинок та їх адгезійно-когезійні властивості, ступінь електризації та інші), та рідкої фаз (вид: плівка, краплі, піна; товщина шару, поверхневий натяг, швидкість і напрямок руху та інші) [2]. Відомий механізм сепарації твердих частинок із запилених потоків, суть якого міститься у взаємодії твердої частинки, що рухається поступально з повітряним потоком, з нерухомим або рухомим шаром рідини. У швидкісному потоці повітря тверда частинка набуває кінетичної енергії, яка витрачається на переборювання сил опору поверхневого шару рідини. Якщо частинка пилу має сферичну форму, то вона вважається уловленою [2], коли занурюється в рідину вище свого міделевого перерізу (екватора), і уноситься з очищеним газовим потоком, якщо володіє кінетичною енергією, якої достатньо для занурювання під рівень рідини, що поглинає. Для елемента, що знаходиться на межі будь-якого тіла, симетрія в розподілі міжмолекулярних сил порушується, що призводить до утворення вільної енергії поверхні [2]. Іншим наслідком цього є поява рівнодіючої молекулярних сил, направленої всередину тіла, яка втягує молекули, що розташовані біля поверхні тіла, всередину, і тим самим зменшує поверхню до мінімуму. Так, при відсутності зовнішніх сил рідина завжди намагається прийняти сферичну форму, яка характеризується мінімальною поверхнею та максимальною поверхневою енергією системи. Вільна поверхня рідини подібна м'якій плівці, що утримується багатьма пружними ниточками, направленими всередину її. Плівка діє на тіла, які з нею торкаються, з певною силою, яку й називають поверхневим натягом. Ця сила проявляється на міжфазних поверхнях, що розмежуються, направлена тангенціально до поверхні рідини і уявляє собою відношення зусилля, з яким поверхнева плівка діє на обмежуючий її контур, до довжини цього контуру. У випадку однокомпонентної рідини ця сила чисельно дорівнює енергії і, відповідно, роботі, що необхідна для подріблення рідини. Опір, що чиниться рухливій частинці при безпосередньому контакті з рідиною на межі розділу фаз, обумовлений насамперед силами поверхневого натягу, що мають місце в мономолекулярному шарі за рахунок сил молекулярного зчеплення. Під цим моношаром, тобто в об'ємі вільної рідини, ці сили в значній мірі врівноважені, і подальшому зануренню твердої частинки в глибину плівки рідини вони практично не здійснюють ніякого опору. Відомо [2], що гідрофобними становляться частинки пилу гідрофільних матеріалів внаслідок утворення на поверхнях частинок електричного потенціалу, однойменного із зарядом на поверхні рідини, а також внаслідок адсорбції на поверхні частинок відносно міцного шару молекул повітря, що перешкоджає їх змочуванню. Практикою доведено, що здатність твердих тіл до змочуваності зменшується із зростанням ступеня їх дисперсності, причому майже такий гранично гідрофільний матеріал як кварц, після тонкого помолу стає важкозмочуваним. Установлений також факт, що частинки розміром менше 10 мкм, особливо менше 5 мкм, незалежно від природи матеріалу відносяться до незмочуваних. Якщо поглинаюча рідина незадовільно змочує частинку, що найчастіше зустрічається на практиці, то поверхня рідини поблизу твердої частинки при їх контакті набуває ввігнуту форму, а сили поверхневого натягу перешкоджають занурюванню частинки. Здатність тонкодисперсних частинок пилу змочуватись суттєво впливає на ефективність її уловлювання в механічних пилоуловлювачах. Для уловлювання гідрофобних частинок необхідно виконання умови: рівень кінетичної енергії, наданий частинці, мусить перевищувати роботу занурення її в рідину, тобто роботу з переборювання сил поверхневого натягу. Ця умова виконується тільки при дуже високих швидкостях наближення фаз. В іншому випадку при 1 UA 81163 U 5 10 15 20 25 30 35 40 45 50 55 60 зіткненні, наприклад з краплею рідини, частинка не просякає в неї, а пружно відбивається, або ж залишається на її поверхні завдяки дії адгезійних сил. В результаті з часом поверхня рідинної плівки чи краплі покривається суцільним шаром, який перешкоджає подальшому захопленню пилинок. В інших рівних умовах ефективність уловлювання гідрофобних частинок тим вище, чим більше швидкість відсепарованих частинок під час контакту з поверхнею розділу фаз. Ця швидкість, як правило, пропорційна кінетичній енергії газового потоку. Тому збільшення загальних енергетичних витрат на очищення повітряних потоків в раціонально cконструйованих мокрих пиловловлювачах, зазвичай, сприяє підвищенню їх ефективності. Розглянемо деякі механізми взаємодії сферичної форми частинки, що не змочується, яка рухається поступально, з нерухомою горизонтальною поверхнею рідини (фіг. 1-3). Нехай напрямок руху частинки (х) складає певний кут () з нормаллю до поверхні рідини (фіг. 1). Сили поверхневого натягу, що діють на межі "рідина-повітря", складають прямий кут з радіусом частинки в точках дотику поверхневої плівки, розташованих на колі периметру (точки С1-С1), і направлені по загальній дотичній до поверхні рідини в точках торкання і до поверхні частинки у тих же точках. Сили поверхневого натягу діють по всій межі взаємодії між рідиною та частинкою, при цьому утворюється результуюча сила, яка діє у протилежному напрямку від вектора швидкості частинки і сприяє виштовхуванню її на поверхню плівки рідини. При будь-яких розмірах і щільності матеріалу частинок можливі такі значення кута входження (), при яких уловлювання частинок може здійснитися тільки при дуже великих швидкостях (W) [2]. Установлено, що у більшості випадків частинки, що досягли поверхні рідини під великим кутом входження (>45°), пружно рикошетують від її вільної поверхні, причому, в залежності від співідношення між величинами W і , вони відбиваються від вільного дзеркала рідини або круто вгору, після чого знову прискорюються і уносяться повітряним потоком (явище вторинного уносу), або рухаються поло над поверхнею рідини, багатократно повторюючи стрибаючі рухи. В останньому випадку можливо повторення рикошетів до тих пір, поки випадковим чином траєкторія стрибаючих частинок не зміниться так, що кут її входження () стане достатньо малим для виконання граничної умови з урахуванням сталої швидкості (W) наближення частинки з поверхнею рідини. Якщо товщина шару поглинаючої рідини значно більше розміру твердої частинки, то остання може цілком зануритися в рідину. Потовщені плівки та шари рідини необхідні для надійного уловлювання частинок при їх підвищених концентраціях в запилених потоках, особливо при наявності в них грубодисперсних фракцій. Такі умови створюються під час очищення запилених повітряних потоків в мокрих плівкових пилоуловлювачах, при цьому для уловлювання частинок використовують немодифіковану рідину, зазвичай воду. Розглянутий вище механізм взаємодії частинки пилу з рідиною (спосіб осадження) покладений в основу роботи практично всіх сучасних конструкцій мокрих пилоуловлювачів, наприклад газопромивачів та високошвидкісних скруберів Вентурі [1, 3, 9]. Відомий спосіб уловлювання твердих частинок, розподілених в рухомому газовому потоці, з допомогою диспергованої у цей потік краплинною рідиною (порожнинні газопромивачі) [1-9]. Відомий спосіб уловлювання твердих частинок, розподілених у повітряному потоці, з допомогою змоченої поверхні інертних тіл (пиловловлювання на інертних тілах) [1, 9]. Відомий також спосіб уловлювання твердих частинок, розподілених у повітряному потоці, з допомогою рідинної багатократної піни, при цьому взаємодія між пиловими частинками та рідиною здійснюється як із-зовні, так і зсередини газових пузирів, що утворюються шляхом барботажу (пінний режим) [2, 3, 9]. В основу перелічених вище способів пиловловлювання фактично закладений принцип динамічної (ударної) взаємодії твердої частинки, що рухається поступально або по криволінійних траєкторіях, з рухомою або нерухомою завадою у вигляді мономолекулярного пограничного шару рідини, що має певну величину опору, обумовлену поверхневим натягом. Спосіб відцентрової сепарації твердих частинок з використанням плівки рідини реалізується в центробіжних пиловловлювачах мокрого типу - циклонах і вихрових апаратах [8, 10-15]. В сухих відцентрових пиловловлювачах відсепарований пил накопичується в бункерній частині. В мокрих пиловловлювачах процес сепарації закінчується при контакті частинок із поглинаючою рідиною, при цьому цей контакт здійснюється на змочених стінках сепараційної камери апарата. Ефективність пиловловлювання при цьому більш висока, ніж в апаратах сухого типу, однак за умови, що поверхня осадження неперервно обновлюється. У протилежному випадку дзеркало рідини покривається суцільним шаром уловлених, але не цілком занурених частинок, які екранують контактну поверхню від нових частинок, які неперервно надходять із закрученого потоку аерозолю, що призводить до суттєвого зниження уловлюючої здатності. У відцентрових пиловловлювачах виконання умови з відновлення якості уловлюючої поверхні 2 UA 81163 U 5 10 15 20 25 30 35 40 45 50 55 досягається подачею рідини із-зовні, рівномірним її розподіленням по внутрішній поверхні сепараційної камери, неперервним відведенням забрудненої рідини за межі апарата на регенерацію або наступну технологічну переробку. Питома витрата рідини (води, розчину) при 3 3 цьому сягає 0,0025 м на 1 м очищуваного повітря, що є цілком достатнім для ефективної роботи мокрого пиловловлювача. На даний час конструктивно найпростішим та широко розповсюдженим представником технічних пристроїв з мокрого пиловловлювання є відцентровий скрубер [6], або циклон с водяною плівкою [2, 3], процес пилоуловлювання в якому протікає у такий спосіб. Крупні пилові частинки під дією відцентрових сил по криволінійній траєкторії рухаються в радіальному напрямку і досягають змоченої поверхні безпосередньо за входом запиленого потоку вже на першому витку висхідної спіралі. В залежності від розміру і швидкості частинки або занурюються у рідину і відводяться з рідиною через нижній штуцер на регенерацію, або, не переборовши опір плівки рідини, пружно відбиваються від стінки і знову повертаються у повітряний потік, що відводиться з апарата. Поряд з великими частинками пилу в сепараційній камері досить ефективно уловлюються середні та мілкі фракції із шарів течії, достатньо близько розташованих до стінок. Вступають у взаємодію з поглинаючою рідиною і уловлюються також погано змочувані частинки, в тому числі і з розміром менше 5 мкм, якщо під час контакту центробіжний рух їх у повітрі характеризується числом Рейнольдса Re>5. В протилежному випадку частинки недостатньо занурюються в плівку рідини і можуть бути зірвані з неї й винесені висхідним потоком. Незмочувані частинки пилу (dч
ДивитисяДодаткова інформація
Назва патенту англійськоюContact module
Автори англійськоюHalich Roman Vasyliovych, Yakuba Oleksandr Rodionovych
Назва патенту російськоюКонтактный модуль
Автори російськоюГалич Роман Васильевич, Якуба Александр Родионович
МПК / Мітки
МПК: B04C 3/06, B01D 45/12
Мітки: контактний, модуль
Код посилання
<a href="https://ua.patents.su/15-81163-kontaktnijj-modul.html" target="_blank" rel="follow" title="База патентів України">Контактний модуль</a>
Контактний водонагрівальний модуль
Номер патенту: 46806
Опубліковано: 17.06.2002
Автори: Комяк Олександр Олександрович, Нікітін Валерій Юрійович, Сезоненко Борис Дмитрович, Сезоненко Олексій Борисович, Алексєєнко Віктор Васильович, Скотнікова Тетяна Володимирівна, Карп Ігор Миколайович, Сорока Валентин Онисимович
МПК: F24H 1/10
Мітки: контактний, модуль, водонагрівальний
Формула / Реферат:
Контактний водонагрівальний модуль, який містить циліндричний корпус з приєднаними до нього днищем, димовідвідним та зливним патрубками, з розташованими всередині співвісно з корпусом циліндричною топкою, приєднаною нижньою частиною своєї бокової поверхні до днища і обладнаною паливоспалювальним пристроєм та вихідним патрубком, з'єднаним з верхньою частиною бокової поверхні, кільцевою обичайкою, яка встановлена для утворення водяної сорочки,...
Масообмінний контактний пристрій

Номер патенту: 92839
Опубліковано: 10.12.2010
Автори: Малета Олеся Володимирівна, Малета Богдан Володимирович
МПК: B01D 3/30
Мітки: контактний, масообмінний, пристрій
Формула / Реферат:
Масообмінний контактний пристрій, що містить полотно тарілки з контактним елементом, додаткове полотно тарілки, рухомий двосторонній клапан, виконаний у вигляді встановлених одна над одною суцільних пластин, з'єднаних між собою дистанційною стійкою, обмежувачі підйому і опускання, обичайку, яка має по периметру отвори, виконані в два ряди - верхній і нижній, з додатковим кожухом, встановленим коаксіально обичайці, з утворенням кільцевого...
Плівковий контактний протитечійний апарат
Номер патенту: 25844
Опубліковано: 27.08.2007
Автор: Коберідзе Володимир Якович
МПК: B01D 53/18, B01D 19/00
Мітки: протитечійний, апарат, контактний, плівковий
Формула / Реферат:
Плівковий контактний протитечійний апарат колонного типу, що містить контактні пристрої, вхідний патрубок для подачі рідини, патрубок для подачі газу в апарат, патрубок для відводу газу з апарата і патрубок для зливу рідини з апарата, який відрізняється тим, що контактний пристрій виконаний у вигляді двох порожнистих конусів: верхнього, меншого діаметра, і нижнього, більшого діаметра, розташованих із зазором один до одного вздовж осі апарата,...
Розбірний контактний вузол

Номер патенту: 3190
Опубліковано: 15.10.2004
Автори: Шевченко Сергій Грігорович, Козирський Володимир Вікторович, Каплун Віктор Володимирович
МПК: H01R 11/00, H01R 4/38
Мітки: контактний, вузол, розбірний
Формула / Реферат:
Розбірний контактний вузол, що містить болтове кріплення та струмопроводи, контактна поверхня яких вкрита композитним змащенням, який відрізняється тим, що композитне змащення містить мілкодисперсний порошок із сплаву з ефектом пам'яті форми.
Контактний пристрій для масообмінних апаратів

Номер патенту: 83273
Опубліковано: 25.06.2008
Автори: Малета Олеся Володимирівна, Малета Богдан Володимирович
МПК: B01D 3/16, B01D 3/18, B01D 3/22
Мітки: контактний, масообмінних, пристрій, апаратів
Формула / Реферат:
1. Контактний пристрій для масообмінних апаратів, що містить барботажне полотно тарілки з контактними елементами, гідрозатвор тарілки для перетікання рідини на нижчерозташовану тарілку, який відрізняється тим, що під полотном барботажної тарілки встановлений піддон з паровим патрубком, а між піддоном та полотном барботажної тарілки розміщений стік з патрубком вирівнювання тиску, при цьому елементи піддона та стоку утворюють гідрозатвор в...
Попередній патент: Спосіб корекції венозних порушень у постінсультних хворих із зміненими запальними маркерами
Наступний патент: Сигналізатор рівня
Випадковий патент: Корозійностійкий тампонажний склад