Прецизійна шпиндельна опора
Номер патенту: 70106
Опубліковано: 15.09.2004
Автори: Зіненко Володимир Миколайович, Тарасов Віктор Олексійович

Формула / Реферат
Прецизійна шпиндельна опора, яка включає радіальну шпиндельну опору, стабілізатори радіального положення осі обертання вала радіальної шпиндельної опори, блок стабілізації радіального положення осі обертання вала радіальної шпиндельної опори, яка відрізняється тим, що у фланцях радіальної шпиндельної опори, які установлені на торцях втулки цієї опори, рівномірно по колу виконані чотири отвори, в кожному отворі установлені укладка, пружина, шайба, а між шайбою і регулювальним гвинтом установлений п'єзостовп, причому укладка, пружина, шайба, п'єзостовп і регулювальний гвинт утворюють п'єзоелектричний регулятор радіального положення осі обертання вала радіальної шпиндельної опори, вал радіальної шпиндельної опори установлений в радіальних опорах кочення, причому укладки п'єзоелектричних регуляторів радіального положення осі обертання вала радіальної шпиндельної опори за допомогою пружин і регулювальних гвинтів згаданих п'єзоелектричних регуляторів пружно підтиснуті до зовнішніх кілець радіальних опор кочення, між радіальними опорами кочення в двох площинах рівномірно по колу у втулці радіальної шпиндельної опори установлені датчики величин зазорів, причому датчики величин зазорів, які установлені в одній площині, з розташованим поряд п'єзоелектричним регулятором радіального положення осі обертання вала радіальної шпиндельної опори утворюють стабілізатор радіального положення осі обертання вала радіальної шпиндельної опори, причому кожний з двох стабілізаторів радіального положення осі обертання вала радіальної шпиндельної опори містить не менше восьми датчиків величин зазорів, до заднього фланця радіальної шпиндельної опори прикріплена осьова аеростатична опора прецизійної шпиндельної опори, яка оснащена аеростатичними регуляторами осьового положення вала осьової аеростатичної опори, причому кожний згаданий аеростатичний регулятор містить шайбу з виконаною на ній регулювальною голкою, яка розташована напроти отвору подачі газу в зазор осьової аеростатичної опори, причому шайба, пружиною, яка установлена під цією шайбою, пружно підтиснута до п'єзостовпа, який установлений між шайбою і регулювальним гвинтом, причому вал осьової аеростатичної опори і жорстко з'єднаний з ним вал радіальної шпиндельної опори утворюють вал прецизійної шпиндельної опори, а датчик осьового зміщення вала осьової аеростатичної опори установлений з зазором відносно внутрішньої поверхні торця вала осьової аеростатичної опори, блок стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори містить вимірювачі величин зазорів, обчислювач, вимірювач кута повороту, операційні підсилювачі, вимикачі "робота-вимк.", вимикачі "увімк.-вимк.", перемикачі "пряме-зворотне", диференційні підсилювачі сигналів управління, диференційні підсилювачі сигналів неузгодження, причому датчики величин зазорів через блок стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори електрично зв'язані з п'єзоелектричними регуляторами радіального положення осі обертання вала радіальної шпиндельної опори, блок балансування вала прецизійної шпиндельної опори містить перемикач "п'єзостовп 1 - вимк. - п'єзостовп 2", ємнісний подільник напруги, підсилювач мікронапруги, індикаторний пристрій, піковий детектор, причому п'єзостовпи п'єзоелектричних регуляторів радіального положення осі обертання вала радіальної шпиндельної опори, які установлені по осях УВ і УГ систем координат XВОВУВ і ХГОГУГ електрично зв'язані з індикаторним пристроєм блока балансування вала прецизійної шпиндельної опори і з обчислювачем, блок стабілізації осьового положення вала прецизійної шпиндельної опори містить вимірювач величини осьового зміщення вала осьової аеростатичної опори, задатчик, диференційний підсилювач, вимикачі "увімк.-вимк.", причому датчик величини осьового зміщення вала осьової аеростатичної опори через блок стабілізації осьового положения вала прецизійної шпиндельної опори електрично зв'язаний з аеростатичними регуляторами осьового положення вала осьової аеростатичної опори, причому датчики величин зазорів з'єднані з входами вимірювачів величин зазорів, виходи вимірювачів величин зазорів з'єднані з входами обчислювача, вихід вимірювача кута повороту з'єднаний з входом обчислювача, виходи обчислювача з'єднані з першими і другими входами диференційних підсилювачів сигналів неузгодження, виходи диференційних підсилювачів сигналів неузгодження через вимикач "робота-вимк." з'єднані з п'єзоелектричними регуляторами радіального положення осі обертання вала радіальної шпиндельної опори, входи кожної пари операційних підсилювачів з'єднані з виходом обчислювача, виходи кожної пари операційних підсилювачів через перемикач "пряме-зворотне" зв'язані з входами диференційних підсилювачів сигналів управління, а їх виходи через перемикач "увімк.-вимк." з'єднані з п'єзоелектричними регуляторами радіального положення осі обертання вала радіальної шпиндельної опори стабілізаторів радіального положення осі обертання вала радіальної шпиндельної опори, п'єзостовпи п'єзоелектричних регуляторів радіального положення осі обертання вала радіальної шпиндельної опори, установлені по осях УВ і УГ систем координат ХВОВУВ і ХГОГУГ через перемикач "п'єзостовп 1 - вимк. - п'єзостовп 2", з'єднані з входами ємнісного подільника напруги, а його виходи з'єднані з входами підсилювача мікронапруги, виходи підсилювача мікронапруги з'єднані з входами індикаторного пристрою і з входами пікового детектора, вихід пікового детектора з'єднаний з входом обчислювача, датчик величини осьового зміщення вала осьової аеростатичної опори з'єднаний з вимірювачем величини осьового зміщення вала осьової аеростатичної опори, а його вихід через вимикач "увімк.-вимк." з'єднаний з першим входом диференційного підсилювача, а його другий вхід з'єднаний з виходом задатчика, виходи диференційного підсилювача через вимикач "увімк.-вимк" з'єднані з аеростатичними регуляторами осьового положення вала осьової аеростатичної опори.
Текст
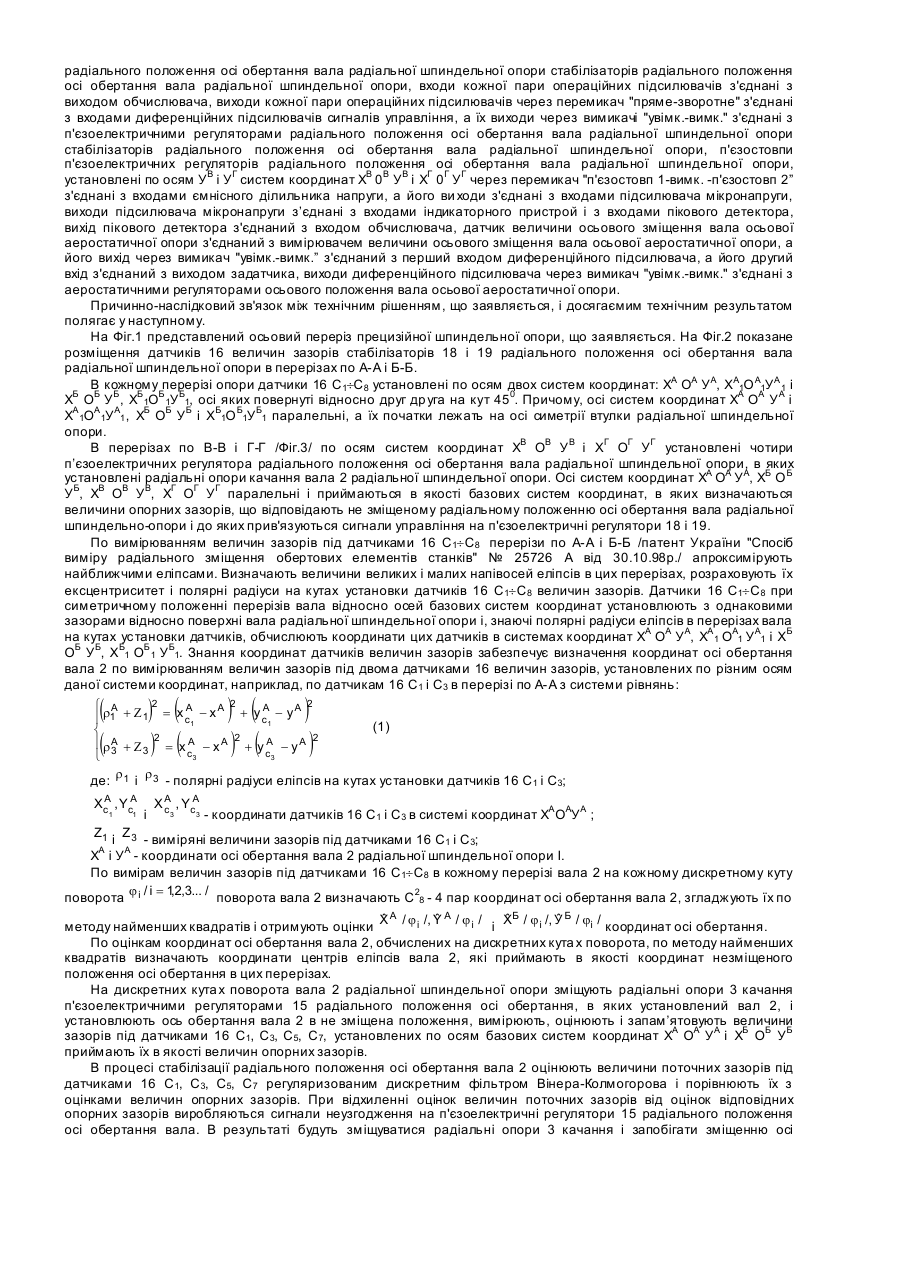
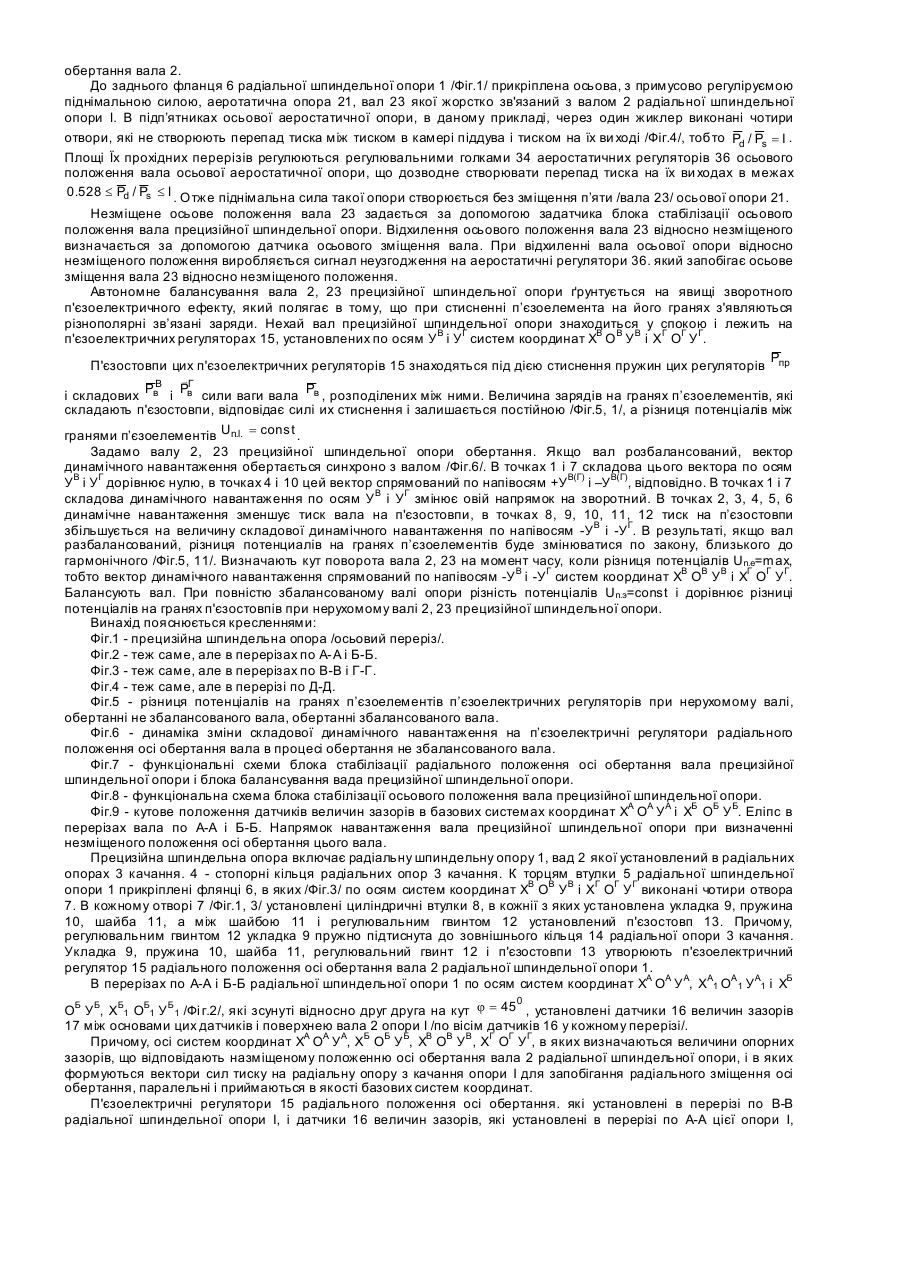
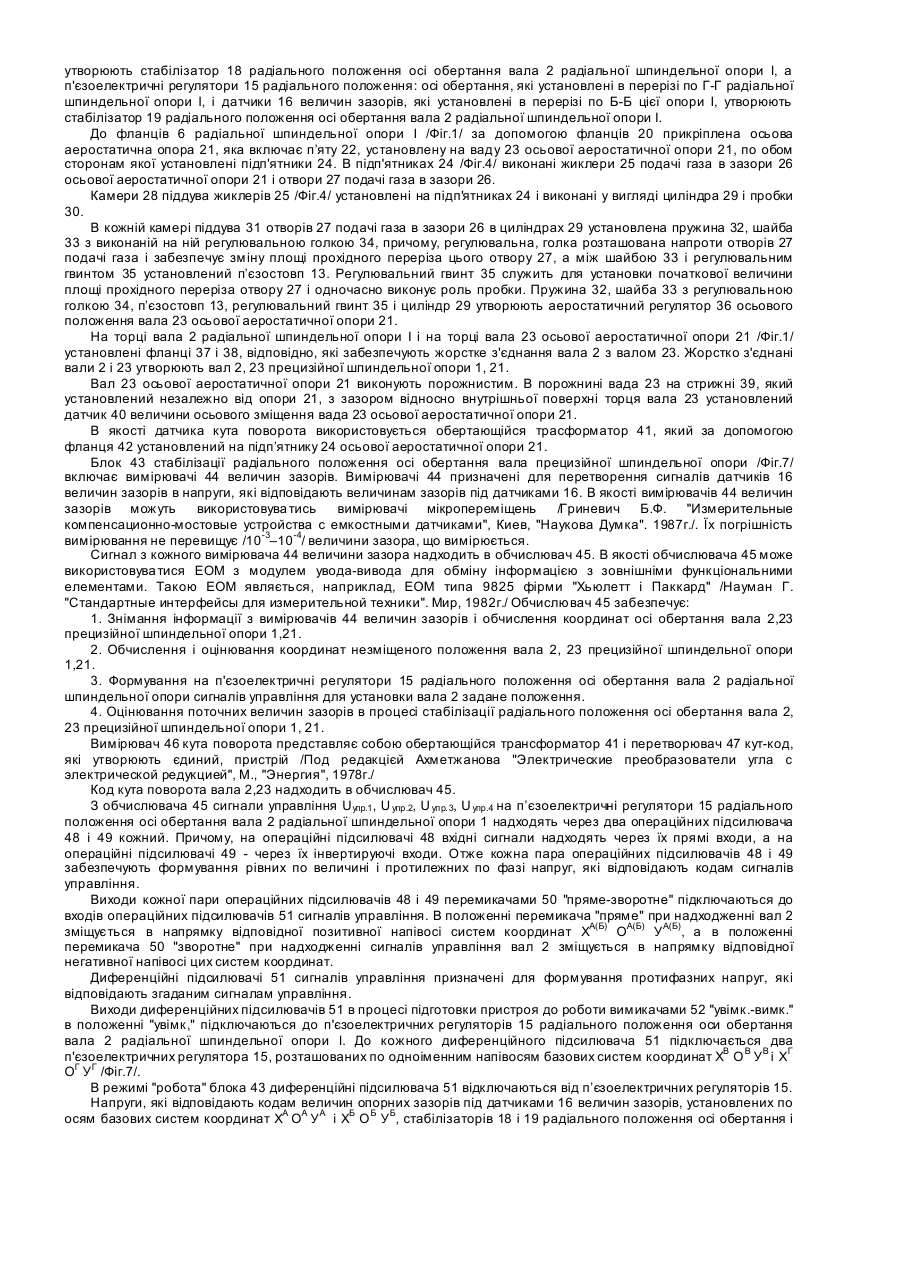
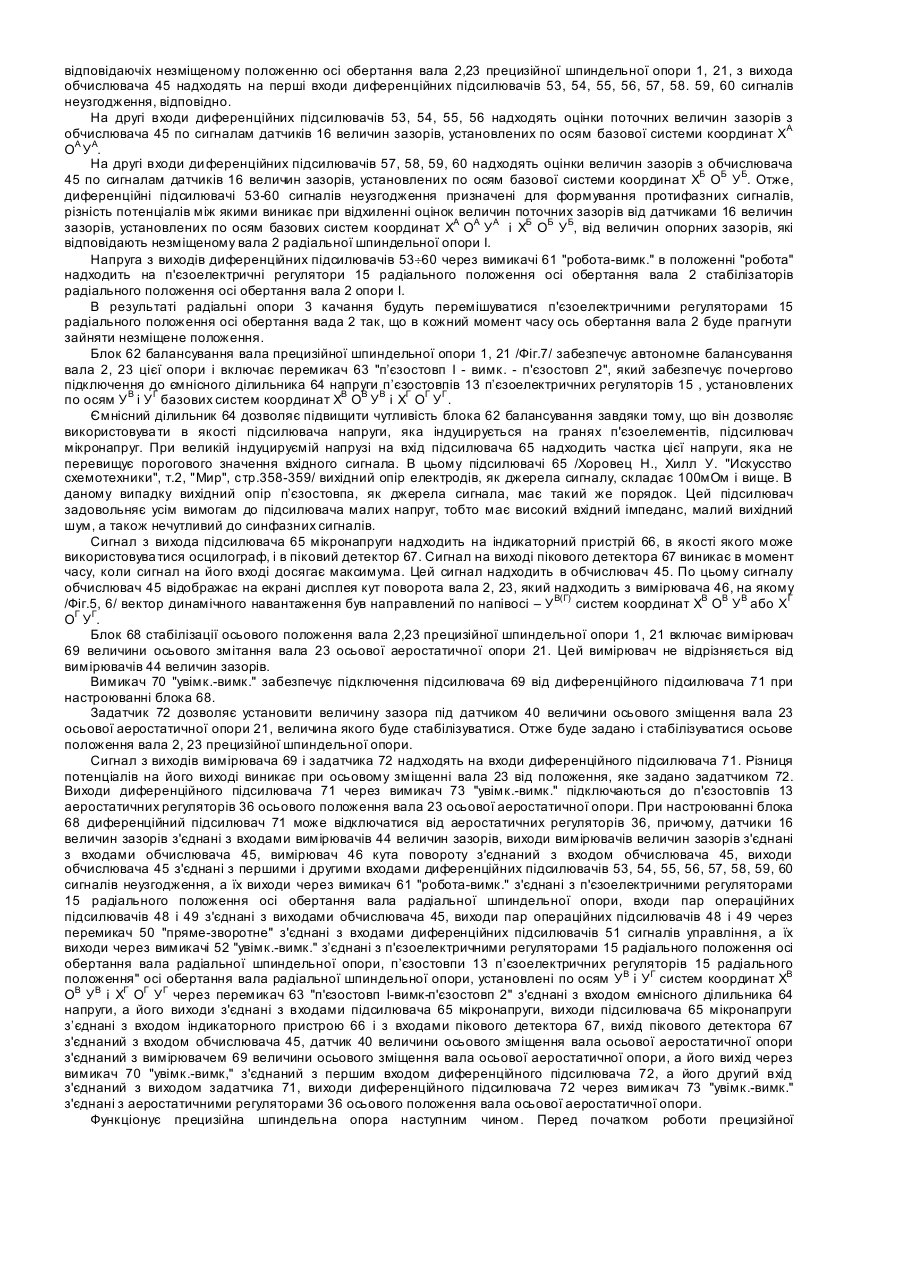
Винахід відноситься до верстатобудування і може бути використаний при конструюванні прецизійних верстатів, шпиндельні опори яких сприймають навантаження без радіального зміщення осі обертання і осьового зміщення вала. Відомий патент України "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори" №25727 А від 30.10.98p. Пристрій по патенту №25727 А вибраний в якості прототипа. Пристрій прототипа включає радіальну аеростатичну опору по зовнішнім сторонам якої установлені компенсатори радіального зміщення осі обертання вала цієї опори. Кожний компенсатор включає рівномірно установлені по колу втулки регулятори тиска газа, які об’єднані в чотири групи регуляторів тиска газа, і датчики величин зазорів, які установлені по осям двох систем координат, осі яких зсунуті на кут 450 . Осі базових систем координат обох компенсаторів, в яких визначаються величини опорних зазорів, що відповідають незміщеному положенню осі обертання вала і к осям яких прив'язуються сигнали управління на групи регуляторів тиска, паралельні між собою. Причому, гр упи регуляторів тиска установлюють симетрично осей базових систем координат. Пристрій прототипу включає також блок стабілізації радіального положення осі обертання вала опори, який включає вимірювачі величин зазорів, обчислювач, вимірювач кута повороту, операційні підсилювачі, вимикачі "робота-вимк.", вимикачі "увімк.-вимк.”, перемикачі "пряме-зворотне", диференційні підсилювачі сигналів управління, диференційні підсилювачі сигналів неузгодження. Недоліком прототипу є складність виготовлення радіальної аеростатичної опори і обмеженість її піднімальної сили. Задача, що вирішується, пологає в заміні радіальної аеростатичної опори на просту в виготовленні радіальну опору на радіальних опорах качання /на радіальних підшипниках/, забезпечив при цьому стабілізацій радіального положення її осі обертання. Задача, що вирішується, полягає також у тому, що в конструкцію прецизійної шпиндельної опори уводиться аеростатичний підп'ятник, піднімальна сила якого регулюється, що забезпечує стабілізацію осьового положення вала цієї опори. Вирішується задача автономного балансування вала цієї опори. Рішення задачі досягається тим, що прецизійна шпиндельна опора, яка включає радіальну шпиндельну опору, стабілізатори радіального положення осі обертання вала радіальної шпиндельної опори, блок стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори, згідно винаходу, в фланцях радіальної шпиндельної опори, які установлені на торцях втулки цієї опори, рівномірно по коду виконані по чотири отвора, в кожному отворі установлені укладка, пружина, шайба, а між шайбою і регулювальний гвинтом установлений п'єзостовп, причому, укладка, пружина, шайба, п'єзостовп і регулювальний гвинт утворюють п’єзоелектричний регулятор радіального положення осі обертання вала радіальної шпиндельної опори, вал радіальної шпиндельної опори установлений в радіальних опорах качання, причому, укладка п’єзоелектричних регуляторів радіального положення осі обертання вала радіальної шпиндельної опора за допомогою пружин і регулювальних гвинтів згаданих п'єзоелектричних регуляторів пружно підтиснуті к зовнішнім кільцям радіальних опор качання, між радіальними опорами качання в двох плоскостях рівномірно по колу у втульці радіальної шпиндельної опори установлені датчики величин зазорів, причому, датчики величин зазорів, які установлені в одній плоскості, з розташованим рядок п'єзоелектричним регулятором радіального положення осі обертання вала радіальної шпиндельної опори утворюють стабілізатор радіального положення осі обертання вала радіальної шпиндельної опори, причому, кожний з двох стабілізаторів радіального положення осі обертання вала радіальної шпиндельної опори містять не менше восьми датчиків величин зазорів, до заднього фланця радіальної шпиндельної опори прикріплена осьова аеростатична опора прецизійної шпиндельної опори, яка наділена аеростатичними регуляторами осьового положення вала осьової аеростатичної опори, причому, кожний згаданий аеростатичний регулятор містить шайбу з виконаною на ній регулювальною голкою, яка розташована напроти отвору подачі газа в зазор осьової аеростатичної опори, причому, шайба пружиною, яка установлена під цією шайбою, пружно підтиснута до п’єзостовпа, який установлений між шайбою і регулювальним гвинтом, причому, вал осьової аеростатичної опори і жорстко з'єднаний з ним вал радіальної шпиндельної опори утворюють вал прецизійної шпиндельної опори, а датчик осьового зміщення вала осьової аеростатичної опори установлений з зазором відносно внутрішньої поверхні торця вала осьової аеростатичної опори, блок стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори містить вимірювачі величин зазорів, обчислювач, вимірювач кута повороту, операційні підсилювачі, вимикачі "робота-вимк.", вимикачі "увімк.-вимк.", перемикачі "пряме-зворотне", диференційні підсилювачі сигналів управління, диференційні підсилювачі сигналів неузгодження, причому, датчики величин зазорів через блок стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори електрично зв'язані з п’єзоелектричними регуляторами радіального положення осі обертання вала радіальної шпиндельної опори, блок балансування вала прецизійної шпиндельної опори містить перемикач "п’єзостовп 1-вимк. –п’єзостовп 2", ємнісний ділильних напруги, підсилювач мікронапруги, індикаторний пристрій, піковий детектор, причому, п'єзостовпи п’єзоелектричних регуляторів радіального положення осі обертання вала радіальної шпиндельної опори, які установлені по осяй У В і У Г систем координат ХВ 0В У В і ХГ 0Г У Г електрично зв'язані з індикаторним пристроєм блока балансування вала прецизійної шпиндельної опори і з обчислювачем, блок стабілізації осьового положення вала прецизійної шпиндельної опори містять вимірювач величини осьового зміщення вала осьової аеростатичної опори, задатчик, диференційний підсилювач, вимикачі "увімк.-вимк.”, причому, датчик величини осьового зміщення вала осьової аеростатичної опори через блок стабілізації осьового положення вала прецизійної шпиндельної опори електрично зв'язаний з аеростатичними регуляторами осьового положення вала осьової аеростатичної опори, причому, датчики величин зазорів з'єднані з входами вимірювачів величин зазорів, ви ходи вимірювачів величин зазорів з'єднані з входами обчислювача, вихід вимірювача кута поворота з'єднаний з входом обчислювача, виходи обчислювача з'єднані з першими і другими входами диференційних підсилювачів сигналів неузгодження, виходи диференційних підсилювачів сигналів неузгодження через вимикач "робота-вимк." з'єднані з п'єзоелектричними регуляторами радіального положення осі обертання вала радіальної шпиндельної опори стабілізаторів радіального положення осі обертання вала радіальної шпиндельної опори, входи кожної пари операційних підсилювачів з'єднані з виходом обчислювача, виходи кожної пари операційних підсилювачів через перемикач "пряме-зворотне" з'єднані з входами диференційних підсилювачів сигналів управління, а їх виходи через вимикачі "увімк.-вимк." з'єднані з п'єзоелектричними регуляторами радіального положення осі обертання вала радіальної шпиндельної опори стабілізаторів радіального положення осі обертання вала радіальної шпиндельної опори, п'єзостовпи п'єзоелектричних регуляторів радіального положення осі обертання вала радіальної шпиндельної опори, установлені по осям У В і У Г систем координат ХВ 0В У В і XГ 0Г У Г через перемикач "п'єзостовп 1-вимк. -п'єзостовп 2” з'єднані з входами ємнісного ділильника напруги, а його ви ходи з'єднані з входами підсилювача мікронапруги, виходи підсилювача мікронапруги з’єднані з входами індикаторного пристрой і з входами пікового детектора, вихід пікового детектора з'єднаний з входом обчислювача, датчик величини осьового зміщення вала осьової аеростатичної опори з'єднаний з вимірювачем величини осьового зміщення вала осьової аеростатичної опори, а його вихід через вимикач "увімк.-вимк.” з'єднаний з перший входом диференційного підсилювача, а його другий вхід з'єднаний з виходом задатчика, виходи диференційного підсилювача через вимикач "увімк.-вимк." з'єднані з аеростатичними регуляторами осьового положення вала осьової аеростатичної опори. Причинно-наслідковий зв'язок між технічним рішенням, що заявляється, і досягаємим технічним результатом полягає у наступному. На Фіг.1 представлений осьовий переріз прецизійної шпиндельної опори, що заявляється. На Фіг.2 показане розміщення датчиків 16 величин зазорів стабілізаторів 18 і 19 радіального положення осі обертання вала радіальної шпиндельної опори в перерізах по А-А і Б-Б. В кожному перерізі опори датчики 16 С1¸С8 установлені по осям двох систем координат: ХА ОА У А, ХА1О А1У А 1 і ХБ ОБ У Б , ХБ 1ОБ 1У Б1, осі яких повернуті відносно друг др уга на кут 450. Причому, осі систем координат ХА ОА У А і ХА 1ОА 1У А1 , ХБ ОБ У Б і ХБ1О Б1У Б1 паралельні, а їх початки лежать на осі симетрії втулки радіальної шпиндельної опори. В перерізах по В-В і Г-Г /Фіг.3/ по осям систем координат ХВ ОВ У В і XГ ОГ У Г установлені чотири п’єзоелектричних регулятора радіального положення осі обертання вала радіальної шпиндельної опори, в яких установлені радіальні опори качання вала 2 радіальної шпиндельної опори. Осі систем координат ХА ОА У А, ХБ О Б У Б, ХВ ОВ У В, ХГ ОГ У Г паралельні і приймаються в якості базових систем координат, в яких визначаються величини опорних зазорів, що відповідають не зміщеному радіальному положенню осі обертання вала радіальної шпиндельно-опори і до яких прив'язуються сигнали управління на п'єзоелектричні регулятори 18 і 19. По вимірюванням величин зазорів під датчиками 16 С1¸С8 перерізи по А-А і Б-Б /патент України "Спосіб виміру радіального зміщення обертових елементів станків" № 25726 А від 30.10.98p./ апроксимірують найближчими еліпсами. Визначають величини великих і малих напівосей еліпсів в цих перерізах, розраховують їх ексцентриситет і полярні радіуси на кутах установки датчиків 16 С1¸C8 величин зазорів. Датчики 16 С1¸С8 при симетричному положенні перерізів вала відносно осей базових систем координат установлюють з однаковими зазорами відносно поверхні вала радіальної шпиндельної опори і, знаючі полярні радіуси еліпсів в перерізах вала на кутах установки датчиків, обчислюють координати цих датчиків в системах координат ХА ОА У А, ХА 1 ОА1 У А1 і ХБ ОБ У Б, ХБ1 ОБ 1 У Б1. Знання координат датчиків величин зазорів забезпечує визначення координат осі обертання вала 2 по вимірюванням величин зазорів під двома датчиками 16 величин зазорів, установлених по різним осям даної системи координат, наприклад, по датчикам 16 С1 і С3 в перерізі по А-А з системи рівнянь: ) ( ) ( ( ( ) ( ) ( ) ì rA + Z 2 = x A - x A 2 + y A - y A 2 1 ï 1 c1 c1 (1) í 2 2 ï rA + Z 3 = x A - x A + y A - y A 2 c3 c3 î 3 r 1 і r 3 - полярні радіуси еліпсів на кутах установки датчиків 16 С і С ; де: 1 3 A A Xc , Yc 1 1 і A X A , Yc c 3 3 ) - координати датчиків 16 С1 і С3 в системі координат ХА ОАУ А ; Z1 і Z 3 - виміряні величини зазорів під датчиками 16 С і C ; 1 3 ХА і У А - координати осі обертання вала 2 радіальної шпиндельної опори І. По вимірам величин зазорів під датчиками 16 С1¸C8 в кожному перерізі вала 2 на кожному дискретному куту , поворота j i / i = 12,3... / поворота вала 2 визначають С2 - 4 пар координат осі обертання вала 2, згладжують їх по 8 ˆA ˆA ˆБ ˆБ методу найменших квадратів і отримують оцінки X / j i /, Y / j i / і X / j і /, У / jі / координат осі обертання. По оцінкам координат осі обертання вала 2, обчислених на дискретних кута х поворота, по методу найменших квадратів визначають координати центрів еліпсів вала 2, які приймають в якості координат незміщеного положення осі обертання в цих перерізах. На дискретних кута х поворота вала 2 радіальної шпиндельної опори зміщують радіальні опори 3 качання п'єзоелектричними регуляторами 15 радіального положення осі обертання, в яких установлений вал 2, і установлюють ось обертання вала 2 в не зміщена положення, вимірюють, оцінюють і запам’ятовують величини зазорів під датчиками 16 С1, С3, С5, С7, установлених по осям базових систем координат ХА ОА У А і ХБ ОБ У Б приймають їх в якості величин опорних зазорів. В процесі стабілізації радіального положення осі обертання вала 2 оцінюють величини поточних зазорів під датчиками 16 С1, С3, С5, С7 регуляризованим дискретним фільтром Вінеpa-Колмогорова і порівнюють їх з оцінками величин опорних зазорів. При відхиленні оцінок величин поточних зазорів від оцінок відповідних опорних зазорів виробляються сигнали неузгодження на п'єзоелектричні регулятори 15 радіального положення осі обертання вала. В результаті будуть зміщуватися радіальні опори 3 качання і запобігати зміщенню осі обертання вала 2. До заднього фланця 6 радіальної шпиндельної опори 1 /Фіг.1/ прикріплена осьова, з примусово регуліруємою піднімальною силою, аеротатична опора 21, вал 23 якої жорстко зв'язаний з валом 2 радіальної шпиндельної опори І. В підп’ятниках осьової аеростатичної опори, в даному прикладі, через один жиклер виконані чотири отвори, які не створюють перепад тиска між тиском в камері піддува і тиском на їх ви ході /Фіг.4/, тобто Pd / Ps = I . Площі Їх прохідних перерізів регулюються регулювальними голками 34 аеростатичних регуляторів 36 осьового положення вала осьової аеростатичної опори, що дозводне створювати перепад тиска на їх ви ходах в межах 0.528 £ Pd / Ps £ I . Отже піднімальна сила такої опори створюється без зміщення п’яти /вала 23/ осьової опори 21. Незміщене осьове положення вала 23 задається за допомогою задатчика блока стабілізації осьового положення вала прецизійної шпиндельної опори. Відхилення осьового положення вала 23 відносно незміщеного визначається за допомогою датчика осьового зміщення вала. При відхиленні вала осьової опори відносно незміщеного положення виробляється сигнал неузгодження на аеростатичні регулятори 36. який запобігає осьове зміщення вала 23 відносно незміщеного положення. Автономне балансування вала 2, 23 прецизійної шпиндельної опори ґрунтується на явищі зворотного п'єзоелектричного ефекту, який полягає в тому, що при стисненні п’єзоелемента на його гранях з'являються різнополярні зв’язані заряди. Нехай вал прецизійної шпиндельної опори знаходиться у спокою і лежить на п'єзоелектричних регуляторах 15, установлених по осям У В і У Г систем координат ХВ О В У В і ХГ ОГ У Г. P П'єзостовпи цих п'єзоелектричних регуляторів 15 знаходяться під дією стиснення пружин цих регуляторів пр vГ В і складових Pв і Pв сили ваги вала Pв , розподілених між ними. Величина зарядів на гранях п’єзоелементів, які складають п'єзостовпи, відповідає силі их стиснення і залишається постійною /Фіг.5, 1/, а різниця потенціалів між гранями п’єзоелементів Un.l. = const . Задамо валу 2, 23 прецизійної шпиндельної опори обертання. Якщо вал розбалансований, вектор динамічного навантаження обертається синхроно з валом /Фіг.6/. В точках 1 і 7 складова цього вектора по осям У В і У Г дорівнює нулю, в точках 4 і 10 цей вектор спрямований по напівосям +У В(Г) і –У В(Г), відповідно. В точках 1 і 7 складова динамічного навантаження по осям У В і У Г змінює овій напрямок на зворотний. В точках 2, 3, 4, 5, 6 динамічне навантаження зменшує тиск вала на п'єзостовпи, в точках 8, 9, 10, 11, 12 тиск на п’єзостовпи збільшується на величину складової динамічного навантаження по напівосям -У В і -У Г. В результаті, якщо вал разбалансований, різниця потенциалів на гранях п’єзоелементів буде змінюватися по закону, близького до гармонічного /Фіг.5, 11/. Визначають кут поворота вала 2, 23 на момент часу, коли різниця потенціалів U n.e=max, тобто вектор динамічного навантаження спрямований по напівосям -У В і -У Г систем координат ХВ ОВ У В і ХГ ОГ У Г. Балансують вал. При повністю збалансованому валі опори різність потенціалів Un.э=const і дорівнює різниці потенціалів на гранях п'єзостовпів при нерухомому валі 2, 23 прецизійної шпиндельної опори. Винахід пояснюється кресленнями: Фіг.1 - прецизійна шпиндельна опора /осьовий переріз/. Фіг.2 - теж саме, але в перерізах по А-А і Б-Б. Фіг.3 - теж саме, але в перерізах по В-В і Г-Г. Фіг.4 - теж саме, але в перерізі по Д-Д. Фіг.5 - різниця потенціалів на гранях п’єзоелементів п’єзоелектричних регуляторів при нерухомому валі, обертанні не збалансованого вала, обертанні збалансованого вала. Фіг.6 - динаміка зміни складової динамічного навантаження на п’єзоелектричні регулятори радіального положення осі обертання вала в процесі обертання не збалансованого вала. Фіг.7 - функціональні схеми блока стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори і блока балансування вада прецизійної шпиндельної опори. Фіг.8 - функціональна схема блока стабілізації осьового положення вала прецизійної шпиндельної опори. Фіг.9 - кутове положення датчиків величин зазорів в базових системах координат ХА ОА У А і ХБ ОБ У Б. Еліпс в перерізах вала по А-А і Б-Б. Напрямок навантаження вала прецизійної шпиндельної опори при визначенні незміщеного положення осі обертання цього вала. Прецизійна шпиндельна опора включає радіальну шпиндельну опору 1, вад 2 якої установлений в радіальних опорах 3 качання. 4 - стопорні кільця радіальних опор 3 качання. К торцям втулки 5 радіальної шпиндельної опори 1 прикріплені флянці 6, в яких /Фіг.3/ по осям систем координат ХВ ОВ У В і ХГ ОГ У Г виконані чотири отвора 7. В кожному отворі 7 /Фіг.1, 3/ установлені циліндричні втулки 8, в кожнії з яких установлена укладка 9, пружина 10, шайба 11, а між шайбою 11 і регулювальним гвинтом 12 установлений п'єзостовп 13. Причому, регулювальним гвинтом 12 укладка 9 пружно підтиснута до зовнішнього кільця 14 радіальної опори 3 качання. Укладка 9, пружина 10, шайба 11, регулювальний гвинт 12 і п'єзостовпи 13 утворюють п'єзоелектричний регулятор 15 радіального положення осі обертання вала 2 радіальної шпиндельної опори 1. В перерізах по А-А і Б-Б радіальної шпиндельної опори 1 по осям систем координат ХА ОА У А, ХА1 ОА 1 У А1 і ХБ 0 ОБ У Б, ХБ1 ОБ1 У Б 1 /Фі г.2/, які зсунуті відносно друг друга на кут j = 45 , установлені датчики 16 величин зазорів 17 між основами цих датчиків і поверхнею вала 2 опори І /по вісім датчиків 16 у кожному перерізі/. Причому, осі систем координат ХА ОА У А, ХБ ОБ У Б, ХВ ОВ У В , ХГ ОГ У Г, в яких визначаються величини опорних зазорів, що відповідають назміщеному положенню осі обертання вала 2 радіальної шпиндельної опори, і в яких формуються вектори сил тиску на радіальну опору з качання опори І для запобігання радіального зміщення осі обертання, паралельні і приймаються в якості базових систем координат. П'єзоелектричні регулятори 15 радіального положення осі обертання. які установлені в перерізі по В-В радіальної шпиндельної опори І, і датчики 16 величин зазорів, які установлені в перерізі по А-А цієї опори І, утворюють стабілізатор 18 радіального положення осі обертання вала 2 радіальної шпиндельної опори І, а п'єзоелектричні регулятори 15 радіального положення: осі обертання, які установлені в перерізі по Г-Г радіальної шпиндельної опори І, і датчики 16 величин зазорів, які установлені в перерізі по Б-Б цієї опори І, утворюють стабілізатор 19 радіального положення осі обертання вала 2 радіальної шпиндельної опори І. До фланців 6 радіальної шпиндельної опори І /Фіг.1/ за допомогою фланців 20 прикріплена осьова аеростатична опора 21, яка включає п’яту 22, установлену на ваду 23 осьової аеростатичної опори 21, по обом сторонам якої установлені підп'ятники 24. В підп'ятниках 24 /Фіг.4/ виконані жиклери 25 подачі газа в зазори 26 осьової аеростатичної опори 21 і отвори 27 подачі газа в зазори 26. Камери 28 піддува жиклерів 25 /Фіг.4/ установлені на підп'ятниках 24 і виконані у вигляді циліндра 29 і пробки 30. В кожній камері піддува 31 отворів 27 подачі газа в зазори 26 в циліндрах 29 установлена пружина 32, шайба 33 з виконаній на ній регулювальною голкою 34, причому, регулювальна, голка розташована напроти отворів 27 подачі газа і забезпечує зміну площі прохідного переріза цього отвору 27, а між шайбою 33 і регулювальним гвинтом 35 установлений п’єзостовп 13. Регулювальний гвинт 35 служить для установки початкової величини площі прохідного переріза отвору 27 і одночасно виконує роль пробки. Пружина 32, шайба 33 з регулювальною голкою 34, п’єзостовп 13, регулювальний гвинт 35 і циліндр 29 утворюють аеростатичний регулятор 36 осьового положення вала 23 осьової аеростатичної опори 21. На торці вала 2 радіальної шпиндельної опори І і на торці вала 23 осьової аеростатичної опори 21 /Фіг.1/ установлені фланці 37 і 38, відповідно, які забезпечують жорстке з'єднання вала 2 з валом 23. Жорстко з'єднані вали 2 і 23 утворюють вал 2, 23 прецизійної шпиндельної опори 1, 21. Вал 23 осьової аеростатичної опори 21 виконують порожнистим. В порожнині вада 23 на стрижні 39, який установлений незалежно від опори 21, з зазором відносно внутрішньої поверхні торця вала 23 установлений датчик 40 величини осьового зміщення вада 23 осьової аеростатичної опори 21. В якості датчика кута поворота використовується обертающійся трасформатор 41, який за допомогою фланця 42 установлений на підп’ятнику 24 осьової аеростатичної опори 21. Блок 43 стабілізації радіального положення осі обертання вала прецизійної шпиндельної опори /Фіг.7/ включає вимірювачі 44 величин зазорів. Вимірювачі 44 призначені для перетворення сигналів датчиків 16 величин зазорів в напруги, які відповідають величинам зазорів під датчиками 16. В якості вимірювачів 44 величин зазорів можуть використовува тись вимірювачі мікропереміщень /Гриневич Б.Ф. "Измерительные компенсационно-мостовые устройства с емкостными датчиками", Киев, "Наукова Думка". 1987г./. Їх погрішність вимірювання не перевищує /10-3–10-4/ величини зазора, що вимірюється. Сигнал з кожного вимірювача 44 величини зазора надходить в обчислювач 45. В якості обчислювача 45 може використовува тися ЕОМ з модулем увода-вивода для обміну інформацією з зовнішніми функціональними елементами. Такою ЕОМ являється, наприклад, ЕОМ типа 9825 фірми "Хьюлетт і Паккард" /Науман Г. "Стандартные интерфейсы для измерительной техники". Мир, 1982г./ Обчислювач 45 забезпечує: 1. Знімання інформації з вимірювачів 44 величин зазорів і обчислення координат осі обертання вала 2,23 прецизійної шпиндельної опори 1,21. 2. Обчислення і оцінювання координат незміщеного положення вала 2, 23 прецизійної шпиндельної опори 1,21. 3. Формування на п'єзоелектричні регулятори 15 радіального положення осі обертання вала 2 радіальної шпиндельної опори сигналів управління для установки вала 2 задане положення. 4. Оцінювання поточних величин зазорів в процесі стабілізації радіального положення осі обертання вала 2, 23 прецизійної шпиндельної опори 1, 21. Вимірювач 46 кута поворота представляє собою обертающійся трансформатор 41 і перетворювач 47 кут-код, які утворюють єдиний, пристрій /Под редакцієй Ахметжанова "Электрические преобразователи угла с электрической редукцией", М., "Энергия", 1978г./ Код кута поворота вала 2,23 надходить в обчислювач 45. З обчислювача 45 сигнали управління Uупр.1 , U упр.2, U упр.3, U упр.4 на п’єзоелектричні регулятори 15 радіального положення осі обертання вала 2 радіальної шпиндельної опори 1 надходять через два операційних підсилювача 48 і 49 кожний. Причому, на операційні підсилювачі 48 вхідні сигнали надходять через їх прямі входи, а на операційні підсилювачі 49 - через їх інвертируючі входи. Отже кожна пара операційних підсилювачів 48 і 49 забезпечують формування рівних по величині і протилежних по фазі напруг, які відповідають кодам сигналів управління. Виходи кожної пари операційних підсилювачів 48 і 49 перемикачами 50 "пряме-зворотне" підключаються до входів операційних підсилювачів 51 сигналів управління. В положенні перемикача "пряме" при надходженні вал 2 зміщується в напрямку відповідної позитивної напівосі систем координат ХА(Б) ОА(Б) У А(Б), а в положенні перемикача 50 "зворотне" при надходженні сигналів управління вал 2 зміщується в напрямку відповідної негативної напівосі цих систем координат. Диференційні підсилювачі 51 сигналів управління призначені для формування протифазних напруг, які відповідають згаданим сигналам управління. Виходи диференційних підсилювачів 51 в процесі підготовки пристроя до роботи вимикачами 52 "увімк.-вимк." в положенні "увімк," підключаються до п'єзоелектричних регуляторів 15 радіального положення оси обертання вала 2 радіальної шпиндельної опори І. До кожного диференційного підсилювача 51 підключається два п'єзоелектричних регулятора 15, розташованих по одноіменним напівосям базових систем координат ХВ О В У В і ХГ ОГ У Г /Фіг.7/. В режимі "робота" блока 43 диференційні підсилювача 51 відключаються від п’єзоелектричних регуляторів 15. Напруги, які відповідають кодам величин опорних зазорів під датчиками 16 величин зазорів, установлених по осям базових систем координат ХА ОА У А і ХБ О Б У Б, стабілізаторів 18 і 19 радіального положення осі обертання і відповідаючіх незміщеному положенню осі обертання вала 2,23 прецизійної шпиндельної опори 1, 21, з вихода обчислювача 45 надходять на перші входи диференційних підсилювачів 53, 54, 55, 56, 57, 58. 59, 60 сигналів неузгодження, відповідно. На другі входи диференційних підсилювачів 53, 54, 55, 56 надходять оцінки поточних величин зазорів з обчислювача 45 по сигналам датчиків 16 величин зазорів, установлених по осям базової системи координат ХА ОА У А. На другі входи ди ференційних підсилювачів 57, 58, 59, 60 надходять оцінки величин зазорів з обчислювача 45 по сигналам датчиків 16 величин зазорів, установлених по осям базової системи координат ХБ ОБ У Б. Отже, диференційні підсилювачі 53-60 сигналів неузгодження призначені для формування протифазних сигналів, різність потенціалів між якими виникає при відхиленні оцінок величин поточних зазорів від датчиками 16 величин зазорів, установлених по осям базових систем координат ХА ОА У А і ХБ ОБ У Б, від величин опорних зазорів, які відповідають незміщеному вала 2 радіальної шпиндельної опори І. Напруга з виходів диференційних підсилювачів 53¸60 через вимикачі 61 "робота-вимк." в положенні "робота" надходить на п'єзоелектричні регулятори 15 радіального положення осі обертання вала 2 стабілізаторів радіального положення осі обертання вала 2 опори І. В результаті радіальні опори 3 качання будуть перемішуватися п'єзоелектричними регуляторами 15 радіального положення осі обертання вада 2 так, що в кожний момент часу ось обертання вала 2 буде прагнути зайняти незміщене положення. Блок 62 балансування вала прецизійної шпиндельної опори 1, 21 /Фіг.7/ забезпечує автономне балансування вала 2, 23 цієї опори і включає перемикач 63 "п’єзостовп І - вимк. - п'єзостовп 2", який забезпечує почергово підключення до ємнісного ділильника 64 напруги п’єзостовпів 13 п’єзоелектричних регуляторів 15 , установлених по осям У В і У Г базових систем координат ХВ ОВ У В і ХГ ОГ У Г . Ємнісний ділильник 64 дозволяє підвищити чутливість блока 62 балансування завдяки тому, що він дозволяє використовува ти в якості підсилювача напруги, яка індуцирується на гранях п'єзоелементів, підсилювач мікронапруг. При великій індуцируємій напрузі на вхід підсилювача 65 надходить частка цієї напруги, яка не перевищує порогового значення вхідного сигнала. В цьому підсилювачі 65 /Хоровец Н., Хилл У. "Искусство схемотехники", т.2, "Мир", стр.358-359/ вихідний опір електродів, як джерела сигналу, складає 100мОм і вище. В даному випадку вихідний опір п’єзостовпа, як джерела сигнала, має такий же порядок. Цей підсилювач задовольняє усім вимогам до підсилювача малих напруг, тобто має високий вхідний імпеданс, малий вихідний шум, а також нечутливий до синфазних сигналів. Сигнал з вихода підсилювача 65 мікронапруги надходить на індикаторний пристрій 66, в якості якого може використовува тися осцилограф, і в піковий детектор 67. Сигнал на виході пікового детектора 67 виникає в момент часу, коли сигнал на його вході досягає максимума. Цей сигнал надходить в обчислювач 45. По цьому сигналу обчислювач 45 відображає на екрані дисплея кут поворота вала 2, 23, який надходить з вимірювача 46, на якому /Фіг.5, 6/ вектор динамічного навантаження був направлений по напівосі – У В(Г) систем координат ХВ ОВ У В або ХГ ОГ У Г. Блок 68 стабілізації осьового положення вала 2,23 прецизійної шпиндельної опори 1, 21 включає вимірювач 69 величини осьового змітання вала 23 осьової аеростатичної опори 21. Цей вимірювач не відрізняється від вимірювачів 44 величин зазорів. Вимикач 70 "увімк.-вимк." забезпечує підключення підсилювача 69 від диференційного підсилювача 71 при настроюванні блока 68. Задатчик 72 дозволяє установити величину зазора під датчиком 40 величини осьового зміщення вала 23 осьової аеростатичної опори 21, величина якого буде стабілізуватися. Отже буде задано і стабілізуватися осьове положення вала 2, 23 прецизійної шпиндельної опори. Сигнал з виходів вимірювача 69 і задатчика 72 надходять на входи диференційного підсилювача 71. Різниця потенціалів на його виході виникає при осьовому зміщенні вала 23 від положення, яке задано задатчиком 72. Виходи диференційного підсилювача 71 через вимикач 73 "увімк.-вимк." підключаються до п'єзостовпів 13 аеростатичних регуляторів 36 осьового положення вала 23 осьової аеростатичної опори. При настроюванні блока 68 диференційний підсилювач 71 може відключатися від аеростатичних регуляторів 36, причому, датчики 16 величин зазорів з'єднані з входами вимірювачів 44 величин зазорів, виходи вимірювачів величин зазорів з'єднані з входами обчислювача 45, вимірювач 46 кута повороту з'єднаний з входом обчислювача 45, виходи обчислювача 45 з'єднані з першими і другими входами диференційних підсилювачів 53, 54, 55, 56, 57, 58, 59, 60 сигналів неузгодження, а їх виходи через вимикач 61 "робота-вимк." з'єднані з п'єзоелектричними регуляторами 15 радіального положення осі обертання вала радіальної шпиндельної опори, входи пар операційних підсилювачів 48 і 49 з'єднані з виходами обчислювача 45, виходи пар операційних підсилювачів 48 і 49 через перемикач 50 "пряме-зворотне" з'єднані з входами диференційних підсилювачів 51 сигналів управління, а їх виходи через вимикачі 52 "увімк.-вимк." з’єднані з п'єзоелектричними регуляторами 15 радіального положення осі обертання вала радіальної шпиндельної опори, п’єзостовпи 13 п’єзоелектричних регуляторів 15 радіального положення" осі обертання вала радіальної шпиндельної опори, установлені по осям У В і У Г систем координат ХВ ОВ У В і ХГ ОГ У Г через перемикач 63 "п'єзостовп I-вимк-п'єзостовп 2" з'єднані з входом ємнісного ділильника 64 напруги, а його виходи з'єднані з входами підсилювача 65 мікронапруги, виходи підсилювача 65 мікронапруги з’єднані з входом індикаторного пристрою 66 і з входами пікового детектора 67, вихід пікового детектора 67 з'єднаний з входом обчислювача 45, датчик 40 величини осьового зміщення вала осьової аеростатичної опори з'єднаний з вимірювачем 69 величини осьового зміщення вала осьової аеростатичної опори, а його вихід через вимикач 70 "увімк.-вимк," з'єднаний з першим входом диференційного підсилювача 72, а його другий вхід з'єднаний з виходом задатчика 71, виходи диференційного підсилювача 72 через вимикач 73 "увімк.-вимк." з'єднані з аеростатичними регуляторами 36 осьового положення вала осьової аеростатичної опори. Функціонує прецизійна шпиндельна опора наступним чином. Перед початком роботи прецизійної шпиндельної опори 1, 21 виконуються наступні настроювальні операції. 1. При рівних нулю сигналах управління установлюють рівний тиск Pd /рівні піднімальні сили/ на виходах аеростатичних регуляторів 36 осьового положення вала 23 осьової аеростатичної опори 21, які дорівнюють P = / Ps - 0. 528Ps / середньому значенню dссе. 2 робочого діапазона тиска на виходах аеростатичних peгуляторів 36. Радіальні опори 3 качання закріплюються в п'єзоелектричних регуляторах 15 при поданому тиску піддува в камери 26 піддува жиклерів 25 осьової аеростатичної опори. Тому після закріплення радіальних опор 3 іподаному тиску піддува п'ята 22 розташується з однаковими зазорами відносно під’ятників 24. Для установлення рівного тиска на виходах регуляторів 36 осьового положення вала 23 подають тиск піддува Ps в камери 28 піддува жиклерів 25 подачі газа в зазори 26 осьової аеростатичної опори 21, газ в камери піддува 31 аеростатичних регуляторів 36 не подають. П'ята 22 опори 21 установиться з рівними зазорами відносно підп'я тників 24. Вимикач 70 "увімк.-вимк." блока 68 стабілізації осьового положення вала 2,23 прецизійної шпиндельної опори 1,21 /Фіг.8/ установлюють в положення "вимк." і відключають вимірювач 69 величини осьового зміщення вала 23осьової аеростатичної опори 21 від входу операційного підсилювача 71. Датчик 40 величини осьового зміщення вала 23 установлюють з мінімальним зазором відносно торця вала 23, наприклад, 10мки, що дозволяє вимірювати величину цього зазора з погрішністю 0.01мкм. До вихода вимірювача 69 підключають вольтметр. Відмітим, що радіальні опори 3 качання мають радіальний, а, отже, і осьовий зазор, який складає одиниці мкм. Подають тиск піддува в камеру 31 піддува одного з аеростатичних регуляторів 36, наприклад, установленому на лівому підп’ятнику 24 опори 21. В початковому стані отвори 27 аеростатичних регуляторів 36 закриті регулювальними голками 34. Знімають початкове показання вольтметра UВ/0/. Регулювальним гвинтом 35 починають відкривати отвір 27 цього аеростатичного регулятора 36 і по показанням вольтметра визначають початок переміщення п’яти 22 /при Pd / Ps = 0.528 припиняється витікання газа через отвір 27 з критичною швидкістю і створюється піднімальна сила цього регулятора 36/. По функціональній залежності між величиною мікропереміщення і вихідною напругою вимірювача 69 l=f/Uизм./ зміщують п’яту 22, наприклад, на Імкм /вправо у даному випадку/ і припиняють збільшува ти площу прохідного переріза отвору 27. Подають тиск піддува в камеру тиска 31 аеростатичного регулятора 36, який розташований на правому підп’ятнику 24 напроти регулятора 36, яким була переміщена п'ята 22. Відкривають регулювальним гвинтом 35 отвір 37 цього регулятора. В момент рівності піднімальних сил регуляторів 36 п’ята 22, а, отже, і вал 23 будуть установлені в початкове положення, а показання вольтметра стане рівним початковому U В /0/. Припиняють збільшувати площу прохідного переріза отвора 27. Повторно, на другому кроці, збільшують площу прохідного переріза отвору регулятора 36 на лівому підп'ятнику 24. Зміщують п'яту 26 на Імкм в сторона правого підп'ятника 24. Потім по показанням вольтметра аеростатичним регулятором 36 правого підп'ятника 24 п'яту 22 і вад 23 повертають в початкове положення. Нехай через “n” кроків на /n+1/ кроці збільшення площі прохідного переріза отвору 27 регулятора 36 на лівому підп'ятнику 24 не викликає зміщення п'яти 22, тобто Pd / Ps стало рівним одиниці, Далі поступають наступним чином. Голками 34 закривають отвори 27 обох регуляторів 36. Наведену вище процедуру повторюють на n/2 кроках. Після установки п'яти 22 на n/2 кроці в початкове положення, піднімальні сили обох регуляторів рівні і рівні середньому значенню їх робочого діапазону. Знімають тиск піддува з цих регуляторів 36. Наведені вище дії послідовно виконують для кожної пари аеростатичних регуляторів 36 осьової аеростатичної опори 21. 2. Визначають параметри еліпсів в перерізах вала 2 радіальної шпиндельної опори І плоскостями установки датчиків 16 величин зазорів /в перерізах по А-А і Б-Б Фіг.1/ Послідовно розраховують коoрдинати датчиків 16 величин зазорів стабілізаторів 18 і 19 радіального положення осі обертання вала радіальної шпиндельної опори, установлених по осям систем координат ХА ОА У А, ХА1 ОА1 У А1 і ХБ ОБ У Б, ХБ1 ОБ 1 У Б1 . 2.1. Визначають параметри еліпса в перерізі вала 2 по А-А. Розраховують координати датчиків 16 в цьому перерізі вала 2. Для виконання цих дій знімають тиск піддува з осьової аеростатичної опори 21. Попередньо в першому наближенні за допомогою датчиків 16 величин зазорів вал 2 опори І установлюють соосно з внутрішньої поверхнею втулки 5, а самі датчики 16 відносно поверхні вала 2 установлюють з розрахунковими величинами зазорів. Виконують пуск підпрограми обчислювача 45 "Індикація величин зазорів". Обчислювач 45 з установленою частотою опитує вимірювачі 44 величин зазорів і вимірювача 46 кута поворота. Величини зазорів 17 під датчиками 16 і кут поворота вала 2 відображаються на екрані дисплея. Перемикач 61 "робота-вимк." установлюють в положення: "вимк." і відключають диференційні підсилювачі 53¸60 сигналів неузгодження від п'єзоелектричних регуляторів 15 осьового положення вала 2. Вимикачі 52 "робота-вимк." установлюють в положення "увімк." і підключають виходи диференційних підсилювачів 51 сигналів управління до п'єзоелектричних регуляторів 15. Переріз вала 2 по А-А установлюють симетрично осі ХА базової системи координат ХА ОА У А. Для цього на довільному куту поворота вала 2 під датчиками 16 С1 і С5 стабілізатора 18, установлених по осі У А /Фіг.2/ установлюють рівні величини зазорів Z1/0/=Z5/0/. Якщо для цього вал необхідно зміщувати в напрямку напівосі +У A перемикач 50 "пряме-зворотне" установлюють в положення "пряме", в противному випадку перемикач 50 уcтановлюють в положення "зворотне". В обчислювач 45 уводять сигнал Uупр.1/0/ і виконують пуск підпрограми "Установка вала І". Сигнал управління Uупр.1/0/ з обчислювача 45 надходить на прямий вхід операційного підсилювача 48 і на інвертируючій вхід операційного підсилювача 49. Напруга з виходів операційних підсилювачів 48 і 49 через перемикач 50 надходить на входи відповідного диференційного підсилювача 51, виходи якого через: вимикач 52 в положенні "увімк." підключені до п'єзоелектричних регуляторів 15. Причому, п'єзостовпи 13 п'єзоелектричних регуляторів 15 до виходів диференційного підсилювача 51 в протифазі так, що радіальна опора 3 качання разом з валом 2 буде зміщена в напрямку напівосі +У на величину, яка відповідає величині сигналу сигналу управління Uупр.1 /0/. Виконують пуск підпрограми "Індикація величин зазорів". З екрадисплея враховують величини зазорів Z1/0/ і Z /0/. Якщо Z1 / 0 / ¹ Z 5 / 0 / , змінюючі величину сигнала управління U /0/ і виконуючі пуски підпрограми 5 упр.1 "Установка вала І", методом послідовних наближень досягають виконання рівності Z1 / 0 / = Z 5 / 0 / . Сигнал управління Uупр.1/0/, при якому виконується ця рівність, запам'ятовують. Не змінюючі положення вала 2 з екрана дисплея зраховують і запам'ятовують величини зазорів Z3/0/ і Z7/0/ під датчиками 16, які установлені по напівосям +ХA і -XA системи координат ХА ОА У А, відповідно. З дискретністю Dj відносно початкового кута поворота вала 2 радіальної шпиндельної опори І установлюють на кути поворота Dj , 2 × D j , 3 × D j , ..., 360 - Dj . На кожному куту повороту зміщують вал 2 і під датчиками 16 стабілізатора 18 радіального положення осі обертання вала 2, установлених по осі У А базової системи координат ХА О А У А, установлюють рівні величини зазорів Z1 / k × D j / = Z 5 / k × Dj / виконуючі наведені вище дії. Сигнали , U у пр.1 / к × Dj / управління , при яких виконувались рівності Z1 / k × D j / = Z 5 / k × Dj / , запам’ятовують. U / к × Dj / На кутах поворота вала 2 j = k × Dj / k = 1,2,3 ... / не змінюючі сигнали управління у пр.1 , під датчиком А 16 величини зазора С 7 стабілізатора 18, установленого по напівосі –X системи координат ХА ОА У А , установлюють величину зазору Z 7 / k × D j / = Z 7 / 0 / . Для цього в обчислювач 45 уводять код сигналу управління U у пр. 2 / к × D j / на п’єзоелектричні регулятори 15 радіального положення осі обертання вала 2 стабілізатора 18, які установлені по осі ХA системи координат ХА ОА У А і виконують пуск підпрограми "Установка вала 2". З U / к × Dj / обчислювача 45 напруга сигналу управління у пр. 2 надходить на операційні підсилювачі 48 і 49 і далі через перемикач 50 "пряме-зворотне", операційний підсилювач 51, вимикачі 52 "увімк.-вимк." на п’єзоелектричні регулятори 15 радіального положення вала. Виконують пуск підпрограми "Індикація величин зазорів". З екрана дисплея зраховують величину зазора Z 7 / k × Dj / і порівнюють її з величиною зазора Z /0/. Якщо Z 7 / k × D j / ¹ Z 7 / 0 / , перемикач 50 "пряме-зворотне" 7 установлюють в положення, яке відповідає напрямку зміщення вала 2, змінюють величину сигналу управління U у пр. 2 / к × D j / і, виконуючі пуски підпрограми "Установка вала 2”, методом послідовних наближень досягають U / к × Dj / виконання рівності Z 7 / k × D j / = Z 7 / 0 / . Сигнал управління у пр. 2 , при якому було досягнуто виконання цієї рівності, запам'ятовують. 3 екрана дисплея зраховують і запам’ятовують величину зазора Z 3 / k × Dj / під датчиком 16 величини зазора стабілізатора 18, установленого по напівоcі +ХA системи координат ХА О А У А. Після отримання величин зазорів Z 3 / k × Dj / на усіх дискретних кутах поворота вала 2 вал 2 установлюють на кут поворота j = k × D j , на якому величина зазора Z 7 / k × D j / = min. k = 1,2,3,..., 3600 - 1/ Dj , U у пр.1 / к × Dj / U у пр. 2 / к × D j / В обчислювач 45 уводять сигнали управління і , при яких виконувалось Z1 / k × Dj / = Z 5 / k × D j / і Z 3 / k × D j / = min . Виконують пуски підпрограм "Установка вала І" і "Установка вала 2". Вал 2 буде установлений в задане положення. Почергово виконуючі пуски підпрограм "Індикація величин зазорій” і "Установка вала І" сигналом управління U у пр.1 / к × Dj / під датчиком 16 C1, установленого по напівосі +У А системи координат ХА ОА У А, установлюють S 0 = Z 0 / k × Dj / + Z 0 / k × D j / 7 3 зазор, рівний Z1 (k × Dj) / 2 , обчислюють і запам'ятовують суму . Запам'ятовують 0 сигнал управління U у пр.2 / к × D 4 / , який забезпечує установку зазора Z 1 / k × Dj // 2 . З кроком Dy зміщують вал 2 в напрямку напівосі -У А базової системи координат ХА ОА У А. На кожному j -му кроці зміщення вала 2 обчислюють суму U j у пр 1 . / к × Dj / j S j = Z j3 / k × Dj / + Z 7 / k × Dj / і запам’ятовують сигнал управління . Після переміщення вала 2 з початкового положення на величину визначають сигнал управління U j у пр 1 . / к × Dj / , який відповідає сумі Sj=min. j В обчислювач 45 уводять сигнал управління U у пр. 1 / к × Dj / і виконують пуск підпрограми "Установка вала І". В результаті переріз вала 2 по А-А буде установлений симетрично осі ХA базової системи координат ХА ОА У А. При цьому велика ось еліпса буде лежати на дій осі ХA. Переріз по А-А вала 2 установлюють симетрично осі У A базової системи координат ХА О А У А. Для цього, не змінюючі кут поворота вала 2, зміщують його по осі ХA в межах величини m Z 3 / k × D j // 2 з кроком Dx .На кожному Z j / k × Dj / Z j5 / k × Dj / кроці зміщення вала 2 по осі ХA вимірюють величини зазорів 1 і під датчиками 16 стабілізатора 18, установлених по осі У A базової системи координат ХА ОА У А i обчислюють їх суму. Зміщують вал j j S j = Z 1 / k × Dj / + Z 5 / k × Dj / = min 2 в положення, при якому сума і установлюють вал 2 симетрично відносно осі j У A. Сигнал управління U у пр. 2 / к × Dj / запам'ятовують. Не змінюючі положення вала 2 під усіма датчиками 16 величин зазорів, зміщуючі їх по висоті зазора, установлюють рівні величини зазорів Z1=Z 2=Z 3=Z4=Z5=Z 6=Z 7=Z 8=Z. В результаті виконання наведених вище дій на куту j = k × Dj поворота вала 2, на якому був досягнутий мінімум величини зазора Z 3 / k × Dj / = min , центр переріза вала по А-А суміщують з початком базової системи координат ХА О А У А, а сам переріз вада 2 установлюють симетрично осей цієї системи координат /Фіг.9/. Цей кут j = k × Dj приймають в якості початка відліку кута поворота вала 2, тобто нульового j = 0 кута поворота. Визначають ексцентриситет еліпса в перерізі вада 2 по А-А. Для цього вал 2 установлюють на кут поворота 0 j = 90 . Почергово, виконуючі пуски підпрограм "Індикація величин зазорів", "Устновка вала I”, "Установка вала 2", по наведеній вище методиці під датчиками С 1 і С5, С3 і С7 стабілізатора 18 установлюють рівні величини зазорів: 0 0 0 Z j= 90 3 0 Z j= 90 7 j Z1 = 90 = Z j= 90 5 ; (2) = і установлюють переріз вада 2 /Фіг.9/ симетрично осей базової сиcтеми координат ХА ОА У А. Припускаючі, що мала напівось еліпса рівна розрахунковому радіусу R вала 2 b=R, обчислюють ексцентриситет еліпса. Для цього в обчислювач 45 уводять значення радіуса R і виконують пуск підпрограми "Обчислення ексцентриситета". Обчислювач 45 опитує відповідні вимірювачі 44 величин зазорів і обчислює величину великої напівосі еліпса: æ j =0 0 j =90 0 ö a A = R + ç Z1 - Z1 ÷ è ø (3) j =0 0 Z де: 1 - величина зазора під датчиком C1 на нульовому j = 0 куту поворота вала 2. Обчислюється напівфокусна відстань "СA" еліпса в перерізі вала 2 по А-А: (a ) A 2 (4) , а також розраховується і запам'ятовується ексцентриситет цього еліпса e=CA/aA. Так як вал 2 радіальної шпиндельної опори І виготовляється д погрішностями розмірів і форми, уточнюють величину малої напівоcі еліпса "b", яка була прийнята рівною розрахунковій величині радіуса R вала 2, а, отже, уточнюють параметри еліпса в перерізі вала 2 по А-А. CA = - b2 0 Для уточнення форми еліпса в перерізі вала 2 по А-А вал 2 установлюють на кут поворота j = 45 . Тоді вершина еліпса "d" /Фіг.9/ переміститься під центр основи датчика 16 С2. 0 Зміщують вал 2 і на куту поворота j = 45 установлюють під датчиками 16 С2, С6, С4, О8 стабілізатора 18 0 Z j=45 = Z j=45 2 6 0 0 Z j=45 = Z j=45 4 8 рівні величини зазорів: , "Установка вала І" і "Установка вала 2". 0 . Для цього, як і раніше, використовуються підпрограми Так як датчики 16 С1 ¸С8 на куту поворота j = 0 були установлені з однаковими зазорами Z1=Z 2=Z3=Z4=Z5=Z 6=Z 7=Z8=Z відносно поверхні вала 2 при суміщеному центрі еліпса з початком базової системи координат ХА ОА У А, а його осі були суміщені з осями цієї системи координат, центр еліпса в перерізі вала 2 по АА після установки під датчиками 16 С2 і C6, С4 і С8 рівних величин зазорів буде співпадати з початком базової системи координат. Тоді, якщо мала напівось еліпса b=R, під датчиками 16 величин зазорів С 1, С3, С5, С7 зазори 0 0 j Z1 =45 , Z j= 45 3 j =45 0 Z1розр . 0 , 0 Z j=45 , Z j= 45 5 7 повинні мати наступні розрахункові значення: é ù b2 b2 ú = Z1 - ê 2 2 ê 1 - e 2 × cos2 a - 45 0 1 - e cos a 1 ú 1 ë û; ( ) é b2 j =45 0 Z 3розр . = Z 3 + êa A 2 2 0 ê 1 - e × cos a 3 - 45 ë ( ) ù ú (5) ú û; é ù b2 b2 j =45 0 ú Z 5розр . = Z 5 - ê 2 2 0 2 2 ê 1 - e × cos a - 45 1 - e cos a 5 ú 5 ë û; ( ) é b2 j =45 0 Z 7розр. = Z 7 - ê a A 2 2 0 ê 1 - e × cos a 7 - 45 ë ( ) ù ú ú û. Виконують пуск підпрограми "Розрахунок величин зазорів". Розраховуються і запам’ятовуються величини 0 0 0 = 45 Z j = 45. , Z jрозр . розр 3 0 = 45 = 45 Z jрозр . , Z jрозр . 5 7 зазорів , Не змінюючі положення вала 2 виконують пуск підпрограми "Індикація величин зазорів", зраховують з екрана дисплея величини зазорів під датчиками 16 С1, C3, C5, С7 і порівнюють їх з отриманими розрахунковими величинами зазорів. Якщо мала напівось еліпса b=R, ці зазори попарно рівні. У противному разі припущення про рівність малої напівосі еліпса “b” розрахунковому значенню радіуса R вала 2 невірне. Для визначення істинного значення малої напівоcі еліпса "b", а, отже, і форми переріза вала 2, виконують пуск підпрограми "Розрахунок малої напівосі еліпса". Варірується значення радіуса R, наприклад, з кроком 0,01мкм в діапазоні R ± 3d в им. , де d в им. - середньоквадратична погрішність вимірювання радіуса R вала 2. Для кожного j -го значення радіуса 0 датчиками 16: ×= 0 Rj розраховуються параметри еліпса aA/j/, CA/j/, e/j/ і величини зазорів під 0 0 j =45 =45 =45 =45 Z1розр . ( j), Z jрозр . ( j) Z jрозр . ( j), Z jрозр . ( j) 3 5 7 , 2 2 і обчислюється різність по нормі: 2 éZ j=45 - Zj =45 ù + é Zj =45 - Z j=45 ù + é Z j=45 - Z j=450 ù + é Z j=450 - Z j= 450 ù 1 .( j) ú роз 3роз.(j) ú 5роз.(j) ú 7роз.(j) ú ê 1в им. ê 3в им. ê 5в им. ê 7в им. ë û ë û ë û ë û 0 0 0 0 0 2 В якості малої напівосі “в” еліпса приймають значення R/j/, якому відповідає мінімальна норма /6/. Розраховують величину великої напівоcі еліпса: æ j =00 j = 900 ö a A = R( j) + ç Z 1 - Z1 (7) ÷ è ø, R напівфокусні відстані "С ", а також ексцентриситет еліпса "e". 2.2. Розраховують координати датчиків 16 величин зазорів стабілізатора 18 радіального положення осі обертання вала 2. Для цього виконують пуск підпрограми "Обчислення координат датчиків". Похідними даними для роботи цієї підпрограми являються величина зазора Z під датчиками 16 і кути a i /Фіг.9/ установки цих датчиків 16 на куту 0 j = 0 поворота вала 2. Розраховуються полярні радіуси r i еліпса на кутах установки датчиків 16; b2 ri = (8) 1 - (e A ) 2 × cos2 a i Розраховуються і запам'ятовуються координати датчиків 16 стабілізатора 18 в системах координат ХА ОА У А і ХА 1ОА 1У А1 : [x [x [x [x A c7 ][ ] = r + z; y = 0;] [x = 0; y = -(r + z );] = 0; y = -( r + z );] [x = -(r + Z ); y = 0;] (9) = -(r + Z ); y = 0;] [x = 0; y = r + z.] Б c1 Б Б = 0; y Б = r1 + z; x1c = rБ + z; y1c = 0; c A c1 A c3 A c5 A A A = 0; y c = r1 + z; x1c = r A + z; y1c = 0; 1 A 2 A c3 3 1 A 1c 4 A c5 5 A 7 A c7 2 A 1c4 A 1c 6 4 A 6 A 1c 8 A 1c6 A 1c8 A 8 Примітка. Для виконання установок вала 2 при виконанні операцій, які були розглянуті, можуть використовува тися і п'єзоелектричні регулятори 15 стабілізатора 19, управління якими здійснюється сигналами управління Uупр.3 i U упр.4. 2.3. Визначають параметри еліпса в перерізі вала 2 по Б-Б. Розраховують координати датчиків 16 величин зазорів стабілізатора 19 радіального положення осі обертання вала 2 радіальної шпиндельної опори І. Для цього виконують п.2,1 і п.2.2 . При цьому сигнали управління Uупр.3 і Uупр.4 на п’єзоелектричні регулятори 15 надходять при виконанні підпрограм "Установка вала 3” і "Установка вала 4". Координати датчиків 16, установленних по осям систем координат ХБ ОБ У Б і ХБ 1 О Б1 У Б 1 мають вигляд: [x [x [x [x Б c3 Б c5 Б c7 ][ ] = r + z; y = 0;] [x = 0; y = -(r + z );] = 0; y = -( r + z);] [x = -(r + Z ); y = 0;] (10) = -(r + Z ); y = 0;] [x = 0; y = r + z.] 1 2 Б c3 3 1 Б 1c 4 2 Б 1c 4 Б 4 Б c5 Б 5 Б 1c 6 Б 6 Б 7 Б c7 Б 1c 8 Б 1c 8 Б 1c 6 8 3. В перерізах вала 2 по А-А і Б-Б радіальної шпиндельної опори І в базових системах координат ХА О А У А і ХБ Б Б О У визначають координати не зміщеного положення oсі обертання вала 2, яка проходить через центри еліпсів, що апроксимірують ці перерізи вала 2. При визначенні координат незміщеного положення осі обертання вала 2 тиск піддува в осьову аеростатичну опору 21 не подають. Вимикачами 52 і 61 п'єзоелектричні регулятори 15 відключають від блока 43 стабілізації радіального положення осі обертання вала 2 радіальної шпиндельної опори І, чим виключають їх вплив на положення вала 2. Уведем /Фіг.9/ рухому зв'язану з валом 2 в плоскості його переднього торця систему координат Х2О 2У 2 . Її осі координат на куту j = 0 поворота вала 2 паралельні осям базових систем координат ХА О А У А і ХБ ОБ У Б. Вал 2 радіальної шпиндельної опори І установлюють на кут j = 0 . Навантажують вал 2 силою P по oсі Х2 в напрямку напівосі –X2, системи координат Х2О2У 2 , достатньої для того, щоб вибрати зазор між внутрішнім кільцем» трьома кульками і зовнішнім кільцем радіальної опори 3 качання. Виконують пуск підпрограми "Обчислення координат осі обертання вала". Обчислювач 45 послідовно N разів опитує кожний вимірювач 44 величини зазора по датчикам 16. Обчислюються асимптотичне незміщені оцінки величин цих зазорів: 1 N ˆ Z A (Б) (j 1 ) = å Z iA(Б ) (j1, n) i N n=1 (11) В пам’яті обчислювача 45 формуються два масива оцінок величин зазорів на куту поворота вала 2 j 1 = 0 ; ˆA ˆ ˆ ˆA ˆA ˆ ˆ7 ˆ Z1 ( j1 ), Z A (j1 ), Z A (j1 ), Z 4 (j1 ), Z 5 (j 1 ), Z A (j 1 ), Z A (j 1 ), Z A ( j1 ) 2 3 6 8 , (12) ˆ ˆ ˆ ˆ4 ˆ5 ˆ ˆ7 ˆ (13) ZБ (j 1 ), Z Б (j 1 ), Z Б (j1 ), Z Б (j1 ), Z Б (j1 ), Z Б ( j1 ), Z Б ( j1 ), Z Б ( j1 ) 1 2 3 6 8 і розраховуються полярні радіуси еліпсів на куту установки датчиків 16 у відповідності з /8/. Для кожного перерізі вала 2 вирішуються 24 системи алгебраїчних рівнянь другого порядку вигляду /І/, В результаті в пам’яті обчислювача 45 буде сформовано два масива координат осі обертання вала 2 /патент України "Спосіб виміру радіального зміщення обертових елементів станків", №25726 А від 30.10.98p./: [x ][x [x ][x A A (0), y1 ( 0) ; 1 Б ( 0), y Б (0) ; 1 1 ][x A (0), y A (0) ; 2 2 ][x Б (0), yБ (0) ; 2 2 ] [x A ( 0), y A (0); ,..., 3 3 ] [x Б (0), y Б (0) ,..., 3 3 ] A ( 0), y A (0) . 24 24 ] Б ( 0), y Б (0) . 24 24 (14) (15) Відхилення цих координат від істинних координат осі обертання вала 2 визначається погрішностями визначення координат датчиків 16 величин зазорів, погрішностями визначення параметрів еліпсів в перерізах вала 2 і погрішностями вимірювання величин зазорів. 0 Для точного визначення координат осі обертання вала 2 на куту j = 0 його поворота 24 пари координат осі обертання вала 2 в кожному перерізі згладжують но методу найменших квадратів: 24 ì [ åí x i =1 î AБ А (Б ) - хі ] [ 2 (о ) + у А (Б) А (Б ) - уі ] 2ü ( о) ý = min þ . (16) Прирівнюють похідну від /16/ нулю і отримують вираження для оцінки координат осі обертання вала 2 в перерізах по А-А і Б-Б: 24 24 å х А (Б) ( j1 ) і å у А (Б) ( j1) і (17) у A(Б ) (j1 ) = і =1 ˆ 24 ; . Обчислюються і запамятовуються оцінки координат осі у відповідності з /17/. На цьому робота підпрограми закінчується. Вал 2 опори І по показанням вимірювача 46 кута поворота послідовно установлюють на кути поворота j 2 = D j1 , j 3 = 2 × Dj1 , j 4 = 3 × D j1 , …, j k = k × Dj1 . На кожному дискретному куту поворота вал 2 навантажують x A(Б ) (j1 ) = і =1 ˆ 24 силою P по осі X2, в напрямку осі –X2 і виконують пуск підпрограми "Обчислення координат осі обертання вала". Отримують /к - І/ оцінку координат осі обертання вала 2 в кожному перерізі: [xˆ A ][ ][ ] [ ] (j 2 ), у А (j 2 ) ; x A ( j3 ), у А (j 3 ) ; x A ( j 4 ), у А ( j 4 ) , ..., x A (j k ), у А (jk ) ; ˆ ˆ ˆ ˆ ˆ ˆ ˆ [xˆ ( j ), у (j ) ]; [xˆ ( j ), у (j ) ]; [xˆ ( j ),уˆ ( j )] , ˆ ˆ ˆ ˆ , [x ( j ),у (j )] ; Б Б 2 Б 2 Б k Б 3 Б Б 3 4 Б 4 (18) k в перерізах вала по А-А і Б-Б в базових системах координат ХАОАУ А і ХБ ОБУ Б по методу найменших квадратів визначають координати незміщеного положення осі обертання вала 2, що проходить через центри еліпсів, які апроксимірують ці перерізи вала 2 k k ˆ å х А (Б ) ( jk ) ˆ åу А( Б) (jk ) (19) k ; . Для цього виконують пуск підпрограми "Обчислення координат не зміщеного положення осі обертання вала". Координати [ХA , У A] і [XБ , У Б] запам'ятовуються. 4. Вал 2 прецизійної шпиндельної опори І послідовно установлюють на кути поворота j1 = 0 , j 2 = Dj 2 , x A ( Б) = k =1 k y A (Б ) = k =1 j 3 = 2 × Dj 2 , ..., j j = j × Dj2 , …, j j = 3600 - D j 2 . На кожному куту поворота ось обертання в перерізах по А-А і Б-Б вала 2, яка проходить через центр еліпсів, що апроксимірують ці перерізи вала 2, установлюють в незміщене положення / в точки з координатами [ХA, У A] і [ХБ , У Б]. Вимірюють, оцінюють і запам’ятовують в якості опорних A A A Z A / j j / Z3 / j j / Z5 / j j / Z7 / j j / ZБ / j / ZБ / j / ZБ / j / ZБ / j / величини зазорів 1 , , , i 1 j , 3 j , 5 j , 7 j під датчиками 16 величин зазорів С1, C3, С5, С7, які установлені по осям базових систем координат ХАО АУ А і ХБ ОБ У Б і які відповідають незміщеному положенню осі обертання вала 2 на цих кутах повороту. Для виконання цих дій по показанням вимірювача 46 кута поворота вал 2 установлюють на кут поворота 0 j = 0 . Виконують пуск підпрограми "Індикація координат осі обертання вала". Обчислювач 45 N разів опитує кожний вимірювач 44 величини зазора по датчикам С1¸С8 /Фіг.2, 7/, установлених по осям систем координат ХA O A У A, ХA 1 OA 1 У A1 і ХБ OБ У Б, ХБ1 OБ1 У Б1 , перетворює вихідні напруги вимірювачів 44 в цифрові двійкові коди і обчислює їх асимптотичне незміщені оцінки у відповідності з /11/. По оцінкам величин виміряних зазорів ˆA ˆ8 ˆ1 ˆ8 Z1 / j1 / ¸ Z A / j1 / в перерізі по А-А вала 2 і оцінкам величин виміряних зазорів ZБ / j1 / ¸ Z Б / j1 / в перерізі по Б-Б вала 2 виконуються дії по обчисленню координат осі обертання вала. Оцінки координат осі обертання вала 2 з ˆА ˆA ˆБ ˆБ /17/ Х / j1 /, Y / j1 / , Х / j1 /, Y / j1 / відображаються на екрані дисплея. [ ][ ] 0 Порівнюють обчислені координати вала 2 на куту j1 = 0 координатами [XА, У А], [XБ, У Б] незміщеного положення осі обертання вала 2. Якщо хоч би одна рівність ˆ ˆ ˆ ˆ ХА / j1 / = ХА ,Y A / j1 / = У А і ХБ / j1 / = Х Б, YБ / j1 / = У Б (20) не виконується, вимикачі 52 "увімк.-вимк." установлюють в положення "увімк.” і підключають диференційні підсилювачі 51 сигналів управління до п’єзоелектричних регуляторів 15 стабілізаторів 18 і 19 радіального положення осі обертання вала шпиндельної опори І. Вимикачі 61 "робота-вимк." установлюють в положення "вимк." і відключають диференційні підсилювачі 53¸60 сигналів неузгодження від п'єзоелектричних регуляторів 15. Виконуючі пуски підпрограм "Установка вала І", "Установка вала 2", "Установка вала 3”, "Установка вала 4" U у пр. 1 / j1 / U у пр. 2 / j1 / U у пр. 3 / j1 / U у пр. 4 / j1 / сигналами управління , , , , методом послідовних наближень досягають виконання рівностей /20/ і установлюють вал у не зміщене положення. Не змінюючи положення вала 2 виконують пуски підпрограми "Формування масиву опорних зазорів”. Обчислювач 45 N разів опитує кожний вимірювач 44 величини зазору, перетворює вихідні напруги вимірювачів 44 у ци фрові двійкові коди і обчислює оцінки величин зазорів у відповідності з /11/. Оцінки величин опорних зазорів ˆA ˆ ˆ ˆ ˆ ˆ ˆ Z1 on / j1 / Z 3 on / j1 / Z A on / j1 / Z A on / j1 / ZБ on / j1 / ZБ on / j1 / Z Бon / j1 / Z Бon / j1 / ˆA , , 5 , 7 i 1 , 3 , 5 , 7 пересилаються у перші вісім вічок масиву опорних зазорів. Наведені вище дії послідовно виконують на кутах поворота вала 2 j 2 = Dj1, j 3 = 2 × Dj1, j 4 = 3 × D j1, ..., [ ] [ ] j j = 360 - Dj1. В результаті в пам’яті обчислювача 45 буде сформований масив величин опорних зазорів для заданих дискретних значень кута поворота вала 2 радіальної шпиндельної опори І: [j [j [j ] (j );] (j );] 1 ˆA ˆA ˆA ˆ7 ˆ1 ˆ3 ˆ5 ˆ7 : Z1 on (j1), Z 3 on (j1 ), Z5 on (j1 ), Z A on ( j1 ), ZБ on (j1 ), ZБ on (j1 ), ZБ on (j1 ), ZБ on (j1 ); 2 ˆA ˆ3 ˆ5 ˆ7 ˆ1 ˆ3 ˆ5 ˆ7 : Z1 on (j2 ), Z A on (j2 ), Z A on (j2 ), Z A on (j2 ), ZБ on( j2 ), ZБon (j 2 ), ZБon (j2 ), ZБon ˆA ˆA ˆA ˆA ˆБ ˆБ ˆБ ˆБ 3 : Z1 on (j3 ), Z 3 on (j3 ), Z 5 on (j3 ), Z 7 on (j3 ), Z1 on( j3 ), Z3 on (j3 ), Z5 on (j3 ), Z7 on .. .. . .. . .. . .. . .. . .. . .. . .. . .. . .. . .. . .. . . .. . .. . .. . ˆ [j : Z j 2 3 ] A ˆA ˆA ˆA ˆБ ˆБ ˆБ ˆБ 1 on ( j), Z3 on ( j ), Z5 on( j ), Z 7 on ( j), Z1 on ( j), Z 3 on ( j), Z5 on ( j), Z7 on ( j); 5. Балансують вал 2. 23 прецизійної шпиндельної опори 1. 21. Для виконання балансування вал 2, 23 опори 1, 21 по показанням вимірювача 46 кута поворота 0 установлюють, наприклад, на кут j = 0 . Виконують пуск підпрограми "Обчислення координат осі обертання вала" /див. п. 4/. Обчислюються і ˆ А (Б) / 0 /, У А (Б ) / 0 / ˆ запам’ятовуються оцінки /17/ координат осі обертання вала 2 X . [ ] Вимикачі 61 "робота-вимк." установлюють в положення "вимк." і відключають п'єзоелектричні регулятори 15 радіального положення осi обертання вала від блока 43. Регулювальними гвинтами 12 п’єзоелектричних регуляторів 15, установлених по осям ХВ і ХГ систем координат XВ ОВ У В і XГ ОГ У Г , для підвищення точності балансування зменшують тиск укладок 9 на зовнішні кільця 14 радіальних опор 3 качання. Перемикач 63 "п’єзостовп І-вимк.-п'єзостовп 2" блока 62 балансування вала прецизійної шпиндельної опори установлюють в положення "п’єзостовп І" і підключають к входу підсилювача 65 мікронапруги /через ділильник 64/ п’єзостовп 13 п’єзоелектричного регулятора 15, який установлений на напівосі -У В системи координат ХВ О В У В в перерізі по В-В вала 2. Виконують пуск підпрограми обчислювача 45 "Балансування" і включають блок 62 балансування. По екрану осцилографа, який використовується в якості блока 66 індикації, вимірюють величину напруги на п’єзостовпі 13, яка обумовлена явищем зворотного п’єзоефекта /Фіг.5, 1/, який виникає під тиском пружини 10 на п'єзостовп 13. Перемикач 63 установлюють в положення "п’єзостовп 2” і до входа блока 62 підключають п’єзостовп 13 п’єзоелектричного регулятора 15, установленого по напівосі -У Г системи координат ХГ О Г У Г в перерізі вала 2 по Г-Г. Як і в першому випадку вимірюють і запам’ятовують напругу на цьому п’єзоcтовпі 13. Примітка. В залежності від розташування центра ваги вала 2,23 до підсилювача мікронапруги 65 можуть підключатися п’єзостовпи 13 п'єзорегуляторів 15, установлених по напівосям +У В і +У Г. Валу 2,23 задають обертання з номінальною швидкістю. До входа блока 62 перемикачем 63 почергово PД підключають п'єзостовпи 13. В момент часу, коли вектор динамічного навантаження y спрямований по напівосі В(Г) –У /Фіг.6/, тиск на п’єзостовпи 13 і напруги, що на них індуцируються, досягають максимума /Фіг.5, 11/. В момент часу. коля напруга досягаї максимума /Фіг.5, точка 10/, піковий детектор 67 видав в обчислювач 45 сигнал максимума. По цьому сигналу обчислювач 45 опитує вимірювач 46 кута поворота вала і відображає цей кут на екрані дисплея. На цьому куту поворота вектор динамічного навантаження був спрямований по напівосі -У B або по напівосі -У Г. Балансують вал відомим способом. При повністю збалансованому ваді напруги, які індуцируються на його п’єзоcтовпах, будуть постійними /Фіг.5, 111/ і рівні початковим /Фіг.5, І/ напругам на цих п’єзостовпах 13 п’єзоелектричних регуляторів 15. 0 Установлюють вал 2,23 на кут поворота j = 0 . Регулювальними гвинтами 12 відновлюють тиск укладок 9 на зовнішні кільця 14 радіальних опор 3 качання і, виконуючі пуски підпрограми "Обчислення координат осі обертання вала", регулювальними гвинтами 12 установлюють вал 2, 23 в початкове положення з координатами ˆ ˆ X A(Б ) / 0 / , У A(Б ) / 0 / . ˆa 6. Розраховують вагові функції К dh регуляризованого фільтра Вінера-Колмогорова для оцінки поточних значень величин зазорів під датчиками 16, установлених по осям базових систем координат. Регуляризований фільтр Вінера-Колмогорова /под редакцией Тихонова А,Н. "Вычислительные методы и програмирование", т. 8, изд. МГУ, 1967г./ для оцінки дискретних вимірювань має вигляд: N N N h h h d ˆa ˆa å å K Z (m - l ) × KZ (l - i) × Kdh (i) + aKdh (m) = å K Z(m - l) × K ZU( l) (22) l =0 , 0 £ m £ N : N - розмір інтервалу спостереження, де: a = 1 / q, / q = 1 2,3 / ; , l =0i =0 J 1 = å Z( j + k )Z( j ) J j =0 - кореляційна функція повного вхідного сигнала, погрішність обчислення якого не перевищує „h”; K h (k ) Z d K ZU(k ) = 1 J å Z( j + k ) × U( j) J j=1 - кореляційна функція повного вхідного і корисного сигнала; ˆ dh K a - імпульсна вагова функція фільтра по параметру регуляризації " a ", коли погрішність завдання кореляційних функцій не перевищує „ d ” і „h”, відповідно. Кореляційні функції отримують на моделі для середнього значення опорних зазорів, а шум моделюється по відомій середньоквадратичній погрішності вимірювача величини зазора s в им. . Оцінку поточної величини зазора під і-им датчиком 16 величина зазора отримують як суму зважених вимірювань величин зазорів, які надійшли на інтервалі спостереження N: ˆ ˆd ˆd ˆd ˆd Z i = Z i( o ) × k ah ( o ) + Zi (1) × k ah (1) + Z i( 2 ) × k ah ( 2) + ... + Zi (N) × k ah (N) ,(23) де: Zi / o / - перше вимірювання величини зазора, яке надійшло на інтервалі спостереження N на куту поворота j k : Zi (N) - останнє вимірювання величини зазора, яке надійшло на інтервалі спостереження N, на куту поворота j k вала опори. Д Дисперсія ф цієї оцінки в N раз менше дисперсії вимірювання вимірювача 44 величини зазору; Дф = Д в им. / N (24) . Для розрахунку вагови х функцій фільтра рівняння (22) записується у вигляді системи алгебраїчних рівнянь. В результаті реалізації підпрограми "Розрахунок вагових функцій" вирішується ця система рівнянь і розраховуються ˆa ˆa ˆa ˆa вагові функції K dh / 0 / , K dh / 1/ , K dh / 2 / ,…, K dh / N / . 7. Робота прецизійної шпиндельної опори в режимі стабілізації осьового положення вала 2, 23 і стабілізації радіального положення осі обертання вала 2, 23 прецизійної шпиндельної опори. Стабілізація осьового положення вала 2, 23 здійснюється наступним чином. Включають блок 68 стабілізації осьового положення вала 2,23 /Фіг.8/. Вимикач 70 установлюють в положення "вимк.". Датчик 40 осьового зміщення вала 23 по показанням вимірювача 69 величини осьового зміщення вала 23 установлюють відносно торця вала 23 з зазором, наприклад, 10мкм. На виході задатчика 72 установлюють напругу, яка рівна вихідній напрузі вимірювача 69. Вимикачі 70 і 73 "увімк.-вимк." установлюють в положення "увімк.". Сигналя з виходів задатчика 72 і вимірювача 69 надходять на входи диференційного вимірювача 71. При осьовому вміщенні вала 2,23 сигнал на виході вимірювача 69 відрізняється від сигнала на виході задатчика 72. В результаті на виході диференційного підсилювача 71 виникає сигнал неузгодження, який надходить на аеростатичні регулятори 36 осьового положення вала 23. В результаті після незначного зміщення осьове положення вала 23 буде відновлене. Стабілізація радіального положення осі обертання вала 23 прецизійної шпиндельної опори 1, 21 здійснюється так. Вимикачі 52 установлюють в положення "вимк.". Вимикачі 61 "робота-вимк." установлюють в положення "робота" і підключають п'єзоелектричні регулятори 15 стабілізаторів 18 і 19 до диференційннх підсилювачів 53¸60 сигналів неузгодження. Виконують пуск підпрограми "Стабілізація". В момент часу її п уска величини опорних зазорів ˆБ ˆA ˆ ˆ ˆ ˆ ˆ5 ˆ7 Z1 on / j1 / Z A / j / Z A / j / Z A / j / Z on / j1 / Z Б / j1 / Z Б on / j1 / Z Б on / j1 / 3 on , 3 on 1 , 5 on 1 , 7 on 1 i , , , для кута j 1 = 0 поворота вала 2, 23 зраховуються з масива опорних зазорів обчислювача 45. При повороті вада 2, 23 на кут 360 - D , тобто з випередженням на кут D відносно кута повороту j 1 = 0 , величини опорних зазорів паралельно перетворюються у відповідні напруги і надходять на перші входи відповідних диференційних підсилювачів 53 - 60 сигналів неузгодження, а з пам'яті обчислювача 45 зраховуються величини опорних зазорів ˆБ ˆБ ˆA ˆA ˆБ ˆA ˆA ˆБ Z 1 on / j 2 / Z 2 on / j 2 / Z 5 on / j 2 / Z 7 on / j 2 / Z 1 on / j 2 / Z 3 on / j 2 / Z 5 on / j 2 / Z 7 on / j 2 / , i , , , , , для другої дискрети j 2 , стабілізації радіального положення осі обертання вала 2, 23. На другі входи диференційних підсилювачів 53¸60 сигналів неузгодження на куту поворота вала 2, 23 360 - D на /N-І/ обертах цього вала через обчислювач 45 надходять сигнали вимірювачів 44 по сигналам датчиків 16 С1, С3, С5 , С7 стабілізаторів 18 і 19, установлених по осям базових систем координат. Сигнали неузгодження /Фіг.7/ з виходів диференційних підсилювачів 53-60 надходять на п’єзостовпи 13 п'єзоелектричних регуляторів 15 радіального положення осі обертання. Причому, ці сигнали неузгодження надходять на регулятори 15 в межах кута поворота j 1 - D = j = j 2 - D , і запобігають радіальне зміщення осі обертання вала 2, 23. Величини зазорів під датчиками 16 С1, С3, С5, С7 стабілізаторів 18 і 19, які зраховуються обчислювачем 45 з вимірювачів 44 на дискетах 360 - D j 2 - D j 3 - D j 4 - D ,..., на перших /N-1/ обертах вала , , , 2, 23, запам’ятовуються. Формуються масиви поточних величин зазорів, наприклад, для датчика 16 C1 в перерізі по А-А вала A Z1 (N-1) 2 для диcкрети j2 кута поворота: A Z1 (1) / j 2 - D / , A Z1 (2 ) / j 2 - D / , A Z1 (3 ) / j 2 - D / ,…, / j2 - D / , де верхній індекс відповідав номеру оборота вала 2, 23. Починаючі з N-го оберта вала 2, 23 виконується оцінювання поточних величин зазорів під датчиками 16 С1, С3, С5, С7 стабілізаторів 18 і 19 дискретним фільтром /22/ Вінера-Колмогорова. Для того ж датчика 16 С в перерізі по А-А вала 2 для углової дискрети j 2 І. На куту j 2 / D 1 > D 2 / обчислювач 45 опитує - відповідний вимірювач 44. Z A (N) / j 2 - D 1 / 2. Оцінюється величина зазора 1 у відповідності з /23/: A (1) A ( 2) ˆ a A a ˆ ˆ ˆ ˆ Z1 ( j 2 - D1) = Z1 (j 2 - D 1 ) × K d h ( o) + Z1 × K d h (1) + ... + Z ( N) × K ah (N - 1) 1 d ˆ ZA / j2 - D1 / 3. Оцінка величини зазора 1 в момент часу поворота вала 2 на кут j = j 2 - D перетворюється у відповідну цій оцінці напругу, яка з випередженням відносно кута поворота на кут D , час поворота вала 2,23 на який рівен часу затримки спрацюванню п'єзоелектричних регуляторів 15, надходить на вхід відповідного диференційного підсилювача 53¸60 сигнала неузгодження. на другий вхід якого одночасно з ним надходить ˆ ZA / j / напруга, яка відповідає величині опорного зазора 1 on 2 . Z A (N+1) / j 2 - D 1 / При зрахуванні на /N+1/ оберті вала на куту j 2 - D1 величини зазора 1 перший член масиву A Z1 (1) ( j 2 - D 1 ) стирається, елементи масива зсуваються на одне слово, а вимірювання становиться останнім елементом масиву. A Z1 (N+1) / j 2 - D 1 / Z A (N+1) / j 2 - D 1 / Виконується оцінка /N+1/ вимірювання 1 ˆ ZA / j - D / Як і раніше, оцінка 1 on 2 перетворюється в напругу і одночасно з напругою величини опорного зазора на куту надходить на вхід відповідного диференційного підсилювача сигнала неузгодження. Оцінювання величин опорних і величин поточних зазорів дозволяє збільшити величини зазорів під датчиками 16 величин зазорів і знизити вимогу до вимірювачів 44 величин зазорів.
ДивитисяДодаткова інформація
Назва патенту англійськоюPrecision spindle support
Автори англійськоюTarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюПрецизионная шпиндельная опора
Автори російськоюТарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 19/00
Мітки: прецизійна, опора, шпиндельна
Код посилання
<a href="https://ua.patents.su/16-70106-precizijjna-shpindelna-opora.html" target="_blank" rel="follow" title="База патентів України">Прецизійна шпиндельна опора</a>
Суміщена шпиндельна опора
Номер патенту: 15383
Опубліковано: 30.06.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B24B 41/00, F16C 29/04, F16C 32/06
Мітки: шпиндельна, опора, суміщена
Формула / Реферат:
1. Совмещенная шпиндельная опора, содержащая корпус, в котором размещен вал, установленный на опоре качения и радиальной аэростатической опоре, выполненной параллельно с опорой качения, отличающаяся тем, что опора снабжена дополнительной опорой качения, установленной параллельно имеющейся, а по обеим сторонам радиальной аэростатической опоры, расположены не менее двух однорядных радиальных аэростатических опор с принудительно регулируемой...
Малогабаритна напівавтоматична прецизійна ділильна головка

Номер патенту: 69125
Опубліковано: 16.08.2004
Автори: Зіненко Володимир Миколайович, Тарасов Віктор Олексійович
МПК: B23B 41/00
Мітки: головка, прецизійна, малогабаритна, ділильна, напівавтоматична
Формула / Реферат:
Малогабаритна напівавтоматична прецизійна ділильна головка, яка містить аеростатичний шпиндельний вузол, пристрій фіксації кутового положення вала аеростатичного шпиндельного вузла, пристрій вимірювання кута повороту вала аеростатичного шпиндельного вузла, яка відрізняється тим, що пристрій фіксації кутового положення вала аеростатичного шпиндельного вузла містить діафрагму, яка прикріплена до переднього торця вала аеростатичного шпиндельного...
Шпиндельна бабка фрезерно – свердлильного верстата
Номер патенту: 36625
Опубліковано: 16.04.2001
Автори: Сіндєєв Володимир Іванович, Кроль Олег Соломонович
МПК: B23B 23/00, B23Q 1/26
Мітки: верстата, свердлильного, шпиндельна, фрезерно, бабка
Формула / Реферат:
Шпиндельна бабка фрезерно-свердлильного верстата, яка містить затискні елементи, розміщені в розточці корпуса шпиндельної бабки верстата і виконані у вигляді двох втулок тангенціального затискача, яка відрізняється тим, що в розточці корпуса шпиндельної бабки верстата додатково розміщено рейковий зубчатий механізм для вертикального переміщення пінолю шпиндельного вузла, кінематичне узгоджений з двома втулками тангенціального затискача.
Шпиндельна бабка фрезерного верстата
Номер патенту: 5240
Опубліковано: 28.12.1994
Автор: Мілащенко Володимир Іванович
МПК: B27C 5/00
Мітки: шпиндельна, фрезерного, верстата, бабка
Формула / Реферат:
Шпиндельная бабка фрезерного станка, включающая корпус, шпиндель с пинолью и хвостовиком, механизм подачи шпинделя и фиксатор шпинделя, отличающаяся тем, что шпиндель выполнен полым, а его хвостовик выполнен в виде промежуточного валика, один конец которого расположен внутри шпинделя и связан с ним шлицевым соединением, причем другой конец промежуточного валика установлен м опорах корпуса шпиндельной бабки, при этом фиксатор установлен на...
Газова опора

Номер патенту: 51835
Опубліковано: 16.12.2002
Автори: Чмут Олександр Олексійович, Власюк Віталій Володимирович
МПК: F16C 32/06
Формула / Реферат:
1. Газова опора, яка містить привідний вал, змонтований в корпусі на двох радіально - упорних підшипниках, утворених конічними поверхнями вала і конічними поверхнями втулок, що охоплюють цей вал, розділених між собою газовим зазором, причому одна із втулок установлена в корпусі жорстко, а друга - з можливістю осьового переміщення за допомогою пристрою зміщення, що діє на торцеву поверхню цієї втулки, а також систему подачі стисненого газу в...
Попередній патент: Спосіб прогнозування ризику рецидиву виразкових дуоденальних кровотеч у осіб молодого віку
Наступний патент: Процес зміцнення і гідроізолювання грунтів та пристрій для його здійснення
Випадковий патент: Спосіб лікування соматоформних розладів