Позиційна шумопеленгаторна станція
Номер патенту: 105308
Опубліковано: 10.03.2016
Автори: Карпенко Євген Валерійович, Білоус Володимир Васильович, Меленко Юрій Ярославович, Павлюк Олег Євгенович, Соловей Володимир Юхимович, Коцюба Віталій Семенович, Зацерковський Руслан Олексійович, Нижник Олександр Ігорович, Липовецька Галина Данилівна, Смідович Ольга Володимірівна, Гурін Олександр Семенович


Формула / Реферат
Позиційна шумопеленгаторна станція, що містить гідроакустичний модуль, який включає комбінований акустичний приймач у складі приймача акустичних сигналів Vx складової коливальної швидкості, приймача акустичних сигналів Vy складової коливальної швидкості, приймача акустичних сигналів тиску Р, тракт аналогової обробки сигналів, у складі X каналу підсилення сигналів, Y каналу підсилення сигналів, Ρ каналу підсилення сигналів, кожний з яких містить вхідний підсилювач, елемент регулювання підсилення, низькочастотний преселектор сигналів, вихідний підсилювач, включені послідовно, контролер тракту аналогової обробки сигналів, перший, другий, третій входи якого з'єднані з виходами, відповідно, X каналу підсилення ННЧ сигналів, Υ каналу підсилення сигналів, Ρ каналу підсилення сигналів, а їх входи АРУ з'єднані з виходом управління контролера тракту аналогової обробки сигналів, компас, перший контролер обміну, з'єднаний першим входом D магістраллю даних і управління гідроакустичного модуля із входом-виходом D контролера тракту аналогової обробки сигналів і виходом D компаса, блок електроживлення гідроакустичного модуля, береговий пост обробки даних, що містить другий контролер обміну, пристрій електроживлення електронної апаратури, цифрову обчислювальну систему обробки даних, управління в складі блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах, блока виміру параметрів, відображення, управління, канал зв'язку гідроакустичного модуля з береговим постом обробки даних, яка відрізняється тим, що в цифрову обчислювальну систему обробки даних, управління вводяться включені послідовно блок формування апаратного, кутового розподілу потоку потужності низької розрізняльності на площині ΟΧΥ на L частотах, з'єднаний першим входом-виходом D із другим входом виходом D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ горизонтальної площини ΟΧΥ на L частотах, блок відновлення фізичного, кутового розподілу потоку потужності високої розрізняльності на площині ΟΧΥ та порогової обробки на L частотах, з'єднаний своїм другим входом-виходом D з першим входом виходом D блока виміру параметрів, відображення, управління, другий вхід-вихід D якого і перший вхід-вихід D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах магістраллю команд і даних цифрової обчислювальної системи з'єднані з першим входом-виходом D другого контролера обміну, канал зв'язку гідроакустичного модуля з апаратурою берегового поста виконаний у вигляді електричного кабелю, що з'єднує інформаційними жилами другий вхід-вихід D першого контролера обміну із другим входом-виходом D другого контролера обміну, а жилами живлення вихід пристрою електроживлення електронної апаратури - із входом блока електроживлення гідроакустичного модуля.
Текст
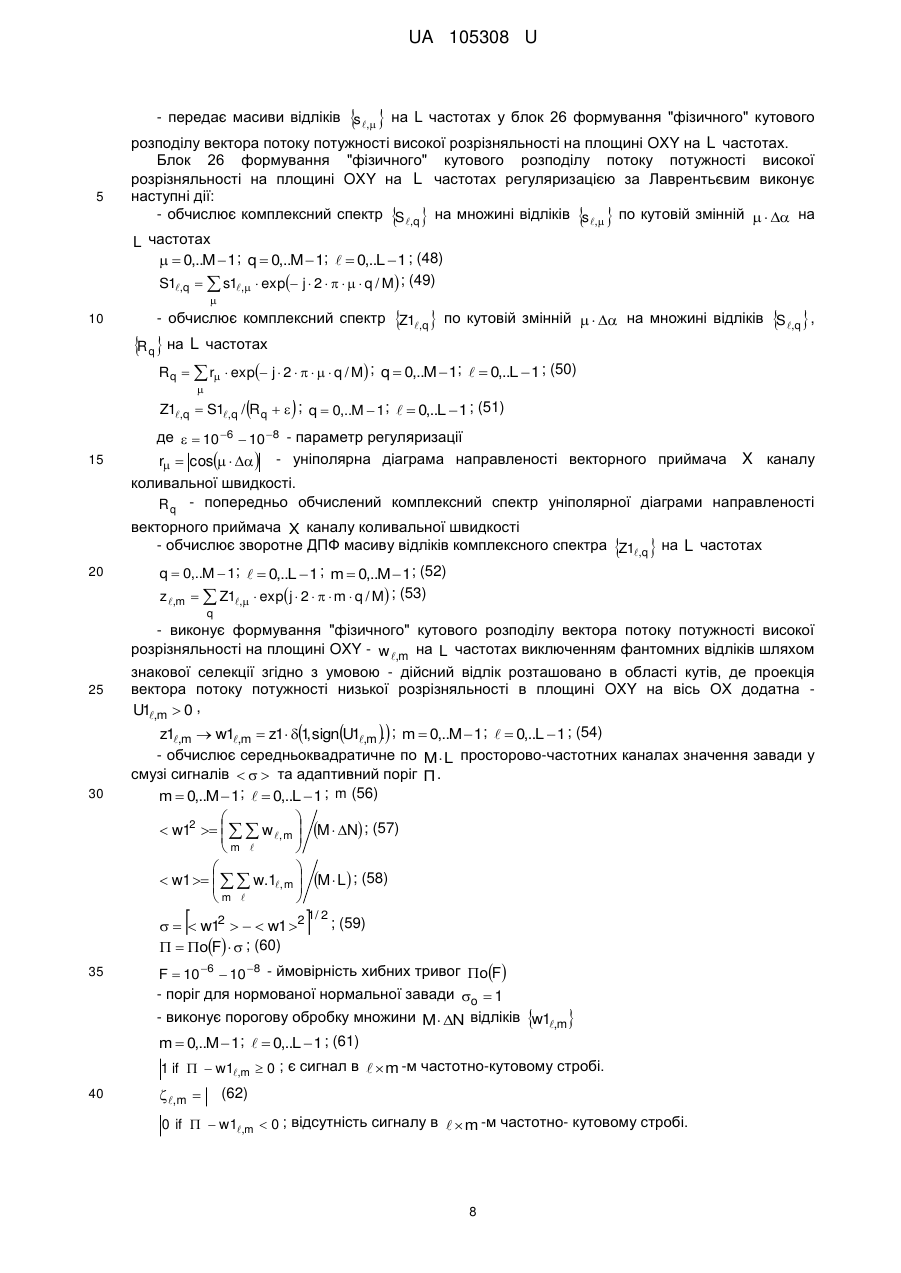
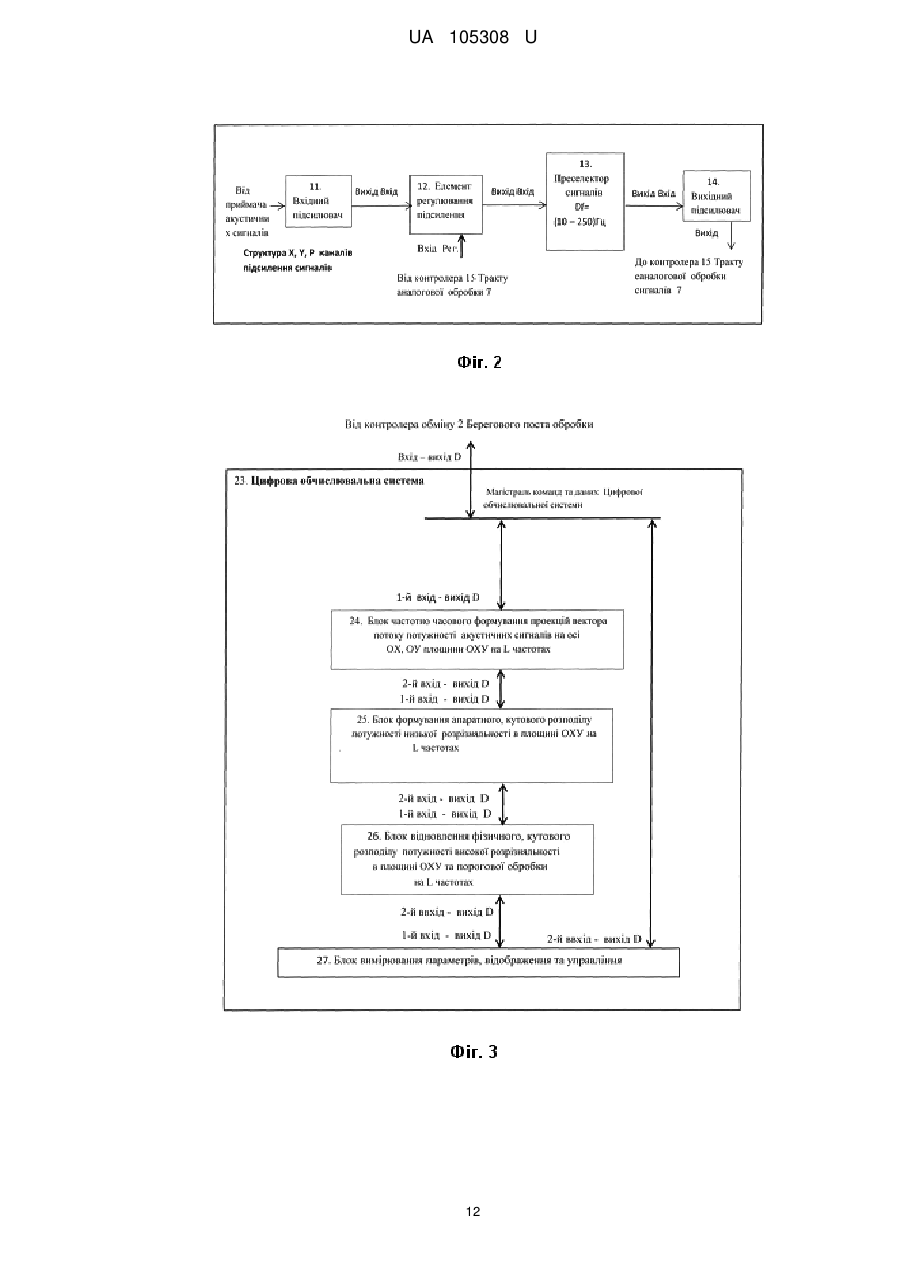
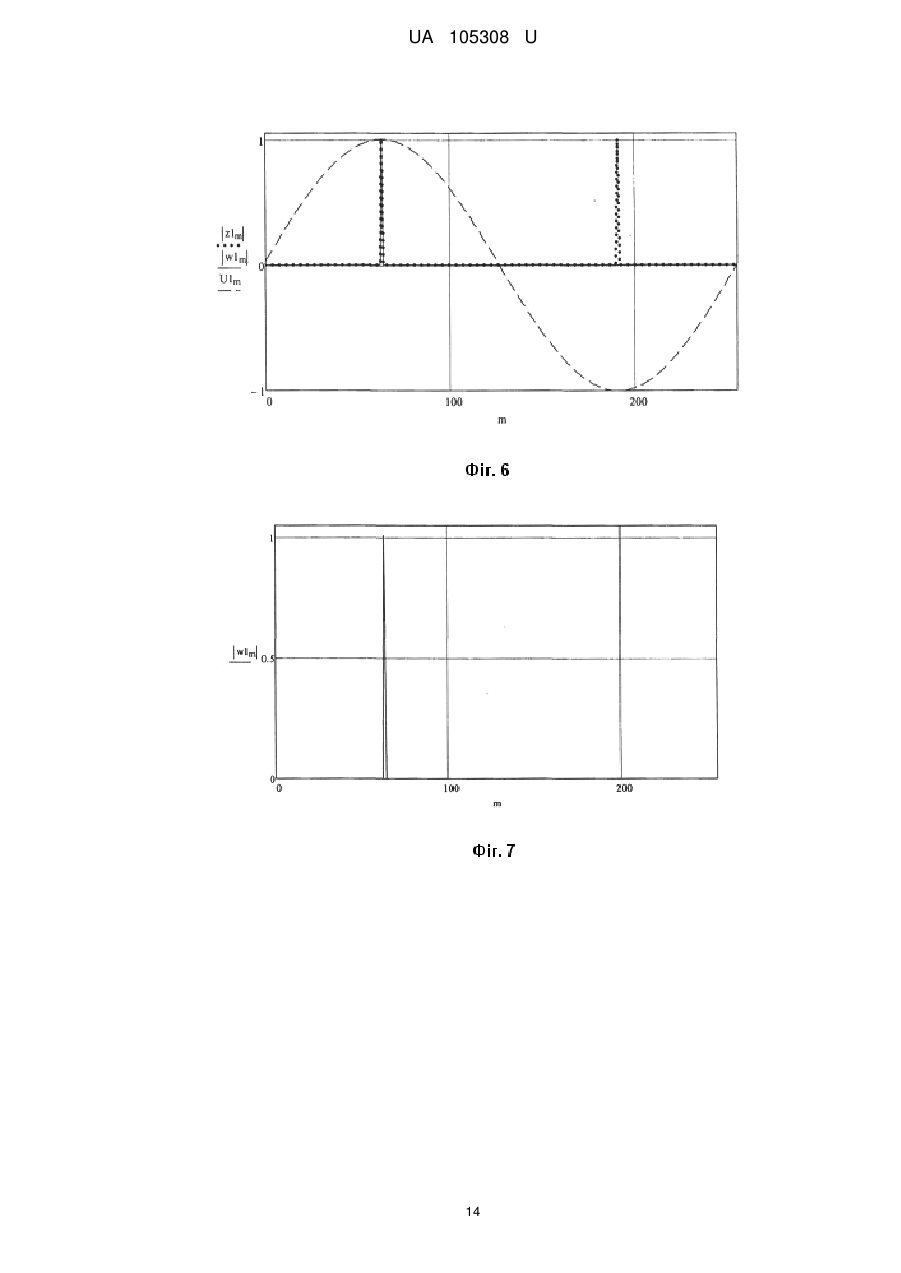
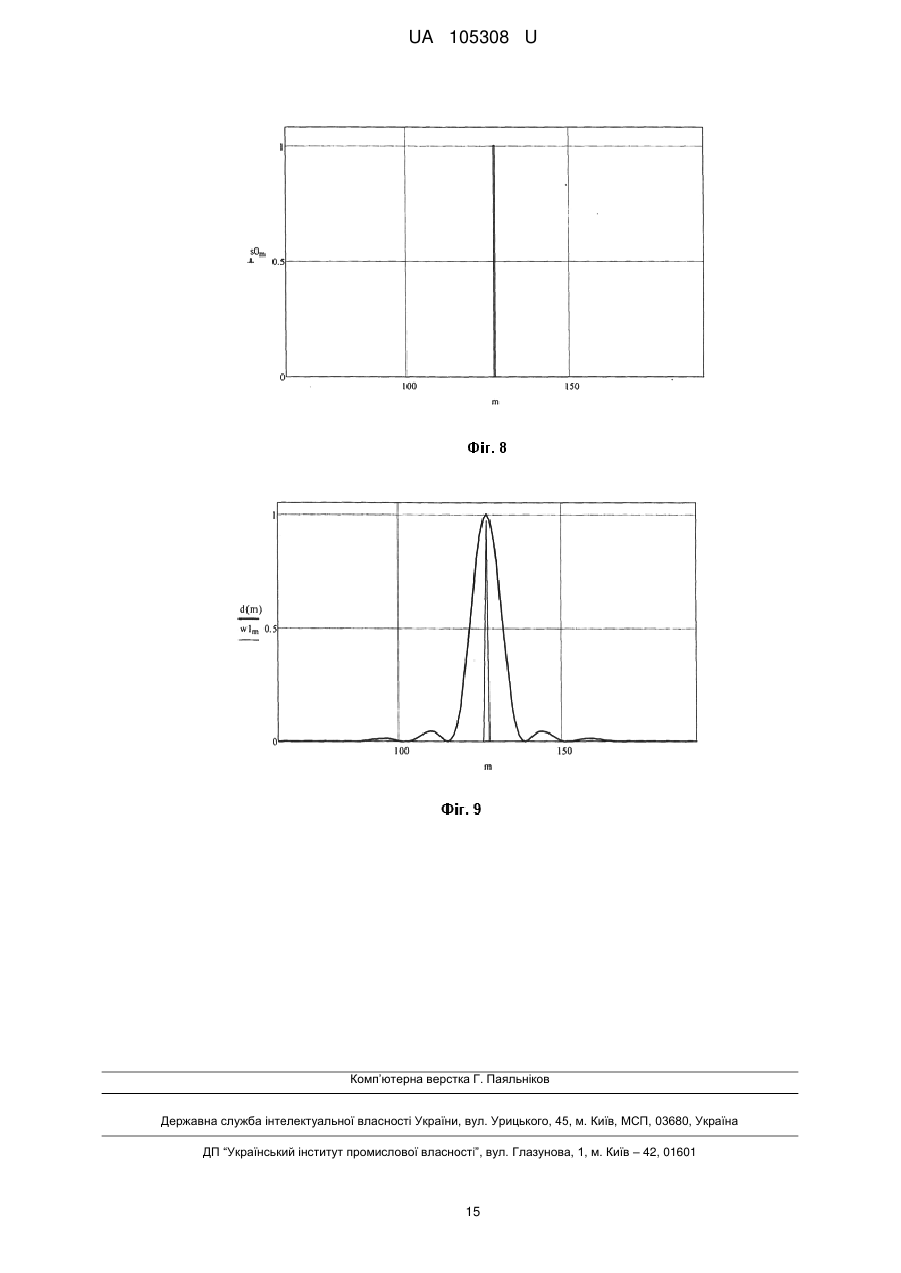
Реферат: Позиційна шумопеленгаторна станція містить гідроакустичний модуль, який включає комбінований акустичний приймач у складі приймача акустичних сигналів Vx складової коливальної швидкості, приймача акустичних сигналів Vy складової коливальної швидкості, приймача акустичних сигналів тиску Р, тракт аналогової обробки сигналів, у складі X каналу підсилення сигналів, Y каналу підсилення сигналів, Ρ каналу підсилення сигналів, кожний з яких містить вхідний підсилювач, елемент регулювання підсилення, низькочастотний преселектор сигналів, вихідний підсилювач, включені послідовно, контролер тракту аналогової обробки сигналів, перший, другий, третій входи якого з'єднані з виходами, відповідно, X каналу підсилення ННЧ сигналів, Υ каналу підсилення сигналів, Ρ каналу підсилення сигналів, а їх входи АРУ з'єднані з виходом управління контролера тракту аналогової обробки сигналів, компас, перший контролер обміну, з'єднаний першим входом D магістраллю даних і управління гідроакустичного модуля із входом-виходом D контролера тракту аналогової обробки сигналів і виходом D компаса, блок електроживлення гідроакустичного модуля, береговий пост обробки даних, що містить другий контролер обміну, пристрій електроживлення електронної апаратури, цифрову обчислювальну систему обробки даних, управління в складі блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах, блока виміру параметрів, відображення, управління, канал зв'язку гідроакустичного модуля з береговим постом обробки даних, причому в цифрову обчислювальну систему обробки даних, управління вводяться включені послідовно блок формування апаратного, кутового розподілу потоку потужності низької розрізняльності на площині ΟΧΥ на L частотах, з'єднаний першим входом-виходом D із другим входом виходом D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ горизонтальної площини ΟΧΥ на L частотах, Блок відновлення фізичного, кутового розподілу потоку потужності високої розрізняльності на площині ΟΧΥ та порогової обробки на L частотах, з'єднаний своїм другим входом-виходом D з першим входом-виходом D блока виміру параметрів, відображення, управління, другий вхідвихід D якого і перший вхід-вихід D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах магістраллю команд і даних цифрової обчислювальної системи з'єднані з першим входом-виходом D другого контролера обміну, канал зв'язку гідроакустичного модуля з апаратурою берегового поста виконаний у вигляді електричного кабелю, що з'єднує інформаційними жилами другий вхід-вихід D першого контролера обміну із другим входом - виходом D другого контролера обміну, а жилами живлення вихід пристрою електроживлення електронної апаратури - із входом блока електроживлення гідроакустичного модуля. UA 105308 U 5 10 15 20 Пропоноване технічне рішення належить до області акустики, гідроакустики та призначене для виявлення об'єктів за їх власним акустичним випромінюванням. Відомі гідроакустичні станції із гнучкою протяжною антеною, наприклад шумопеленгаторна станція за патентом SU № 1840459, МПК G01S 7/52. У прийомний тракт шумопеленгаторної станції, що містить гнучку протяжну антену, пристрій попередньої обробки сигналів, пристрій аналого-цифрового перетворення й ущільнення інформації, спектроаналізатор і m -канальний формувач характеристик направленості, для однозначності пеленгування введені друга гнучка протяжна антена, другий пристрій попередньої обробки сигналів, другий пристрій аналогоцифрового перетворення й ущільнення інформації, другий спектроаналізатор і m -канальний помножувач, що компенсують просторовий напрямок приходу звукової хвилі в кормовому секторі. Для роботи в області наднизьких частот f = (10 – 150) Гц із довжиною хвилі = (150 – 30) м лінійні антени на базі приймачів тиску з міжелементною відстанню b / 0.5 і шириною характеристики направленості, нормальної до розкриву антени 20 , що розраховується по формулі (1) [1] мають протяжність акустичної частини L 900 60 м, а разом з кабельбуксиром (1200-200) м [2], являють собою складні в експлуатації технічні пристрої, мають обмежений сектор огляду D 60 і вимагають компенсації віброзавади в кормовому секторі носія, що є їхнім недоліком. 2 arcsin / n b ; (1) sin / 2 /n b ; (2) n b / sin / 2 ; 20 ; sin 20 / 2 0.1736 ; f 150 Гц; c / f 1500/ 150 10 м; n b / sin / 2 10 / 0 / 1736 57 м; 25 30 35 40 45 50 f 10 Гц; c / f 1500/ 10 150 м; n b / sin / 2 150 / 0 / 1736 864 м; Відомий пристрій "Автономна станція гідроакустичного спостереження" згідно з патентом на корисну модель SU № 24890, МПК G10K 11/00, G01H 17/00, що включає гідроакустичний антенний модуль, який містить N гідроакустичних реєстраторів, виконаних у вигляді гідроакустичного приймача тиску, попереднього смугового підсилювача, аналого-цифрового перетворювача, процесора сигналів з накопичувачем, з'єднаних послідовно й розміщених на відомій поверхні, наприклад ділянці сфери, на відстані, що не перевищує половину довжини хвилі, обчислювальний бортовий модуль, пристрій встановлення і зняття гідроакустичного антенного модуля, сигнальних пристроїв для пошуку гідроакустичного антенного модуля що сплив. Недоліки пристрою: - гідроакустичний антенний модуль сферичної геометрії, побудований на приймачах тиску з міжелементною хвильовою відстанню b / 0.5 при роботі на частоті f 150 Гц, для ширини діаграми направленості 20 повинен мати діаметр сфери d 60 м, що призводить до збільшення габаритів; - у пристрої відсутній канал зв'язку з бортовою апаратурою, що унеможливлює оперативне знімання і аналіз даних. Найбільш близьким за призначенням, робочому діапазоні частот, типу акустичних датчиків є багатоканальний комбінований гідроакустичний комплекс за патентом RU № 82972, МПК Η04В 10/00, що містить акустичну антену у вигляді M комбінованих акустичних приймачів (КАП), виконаних у вигляді M приймачів тиску і M векторних приймачів, 4 M канальний підсилювач, підключений входами до відповідних 4 M виходів M КАП, телеметричний блок, у складі АЦП, з'єднаного входами з виходами 4 M канального підсилювача, першого контролера обміну, включених послідовно (в описі включає аналого-цифрову перетворюючу схему, підключену своїми входами до виходів 4 M канального підсилювача, єдину схему електронного мультиплексування й оптичний випромінювач, зв'язаний оптичною лінією зв'язку з оптичним ресивером), лінію зв'язку, береговий пост, другий контролер обміну, сигнал з якого надходить у цифрову обчислювальну систему (в описі систему збору, обробки і відображення інформації), додатково оснащену програмним модулем для формування діаграми направленості в режимі реального часу та пристроєм доступу до цифрових мереж передачі даних. У згаданому патенті комбіновані акустичні приймачі, розміщені еквідистантно уздовж лінійної бази, утворюючи фазовану лінійну решітку. 1 UA 105308 U Діаграма направленості такої лінійної еквідистантної M елементної решітки дорівнює добутку діаграми направленості окремого комбінованого приймача o і діаграми 5 10 15 20 25 30 35 направленості лінійної решітки ненаправлених приймачів 1 [1]. Визначення напрямку на джерело, що шумить, в пристрої-прототипі виконується скануванням простору променем, орієнтація якого задається різними фазовими зсувами між сигналами окремих приймачів. У прототипі ширина діаграми направленості лінійної решітки ненаправлених приймачів 1o, , компенсованої під кутом o , що визначає точність, пеленгування максимальним амплітудним методом, описується виразом [1]. 0.55 I / Iмах /М b coso ; (3) I / Iмах - відносна до Iмах зміна інтенсивності акустичного поля. З (3) випливає розширення головного й додаткових пелюсток діаграми направленості компенсованої лінійної решітки при скануванні пропорційно 1/ coso , що веде до погіршення точності пеленгування максимальним амплітудним методом, розрізняльної здатності, завадостійкості, а також обмежує сектор огляду діапазоном кутів / 3 / 3 . Існує також обмеження фізичного порядку на збільшення завадостійкості, точності пеленгування в пристрої прототипі, а саме «…неможливість значного збільшення числа комбінованих акустичних приймачів і апертури антени через значні дисперсійні викривлення акустичного сигналу при його поширенні у мілкому морі. Внаслідок таких викривлень алгоритми фазування сигналів, прийнятих окремими елементами антени, як і покладені в основу формувача діаграми направленості і сам алгоритм вимірювання азимутального кута на джерело звуку за формулою (1) стають неефективними. У результаті дальність дії вимірювальної антени не збільшується, а похибка виміру пеленга не зменшується при збільшенні апертури антени. [3]. В основу технічного рішення, що заявляється, поставлено задачу вдосконалення відомого пристрою для забезпечення поліпшення функціональних характеристик позиційної шумопеленгаторної станції: підвищення точності вимірювання пеленга позиційної шумопеленгаторної станції на базі КАП; мінімізацію підводної апаратури шумопеленгаторної станції. Згадані вдосконалення вирішуються на базі векторного опису акустичного поля шляхом формування апаратного кутового розподілу потоку потужності низької розрізняльності в площині ΟΧΥ на L частотах в наднизькому діапазонні з наступним відновленням "фізичного" кутового розподілу потоку потужності високої розрізняльності. При використанні векторного опису акустичного поля [4] вихідні просторові сигнали u , v на частоті двох ортогональних векторних приймачів з осями, орієнтованими уздовж координатних осей ΟΧ, ΟΥ, описуються виразами (4), (5) rx s0 , d cos s0 , d u ; (4) ry s0 , d sin s0 , d v ; (5) де: rx cos ; ry sin ; 0, 2 ; (6) 40 45 s0 , - модуль проекції вектора потоку акустичної потужності на площину ΟΧΥ з кутом приходу на частоті ; rx - діаграма направленості векторного приймача, орієнтованого уздовж осі ОХ; ry - діаграма направленості векторного приймача, орієнтованого уздовж осі ΟΥ; u - x -компонента проекції вектора потоку акустичної потужності на площину OXY на частоті ; v - y -компонента проекції вектора потоку акустичної потужності на площину ΟΧΥ на частоті . Компоненти проекції вектора потоку акустичної потужності на площину ΟΧΥ при поворотах на кут , можуть бути отримані синус-косинусною інтерполяцією відліків u , v . cos u sin v cos rx s, d sin ry s0 , d cos cos sin sin s, d cos s, d U, ; (7) 2 UA 105308 U sin u cos v sin rx s, d cos ry s, d sin cos cos sin s, d sin s, d V , ; (8) r1 cos ; (9) r 2 sin ; (10) r1 s0 , d U, ; (11) 5 r 2 s0 , d V , ; (12) У виразах (11), (12) модуль проекції вектора потоку потужності на площину ΟΧΥ s0 , є додатними для всіх значень , 10 s, 0 . (13) Вважаючи, що за час спостереження T 30 сек. у зоні радіусом (5-10) км перебуває тільки одне джерело гармонійного сигналу на частоті із шириною спектральної лінії f 0.5 1 Гц із невідомим кутом приходу j , можна представити s0 , з урахуванням (13) у вигляді s, S0 , j ; S0 0 . (14) 15 Діаграми направленості векторних приймачів r1 , r 2 , згідно з (9), (10) біполярні і двонаправлені. Уніполярні діаграми p1 , p2 с алгебраїчні модулі від r1 , r 2 . 20 p1 r1 ; p2 r 2 . (15) Уніполярні проекції апаратного кутового розподілу проекції вектора потоку акустичної потужності U1, , V1, на площину ΟΧΥ з урахуванням (13)-(15) можуть бути отримані обчисленням алгебраїчного модуля згортки (11), (12) U, U1, r1 s, d r1 s0 , j d r1 j s0 r1 j s0 p1 j s0 p1 s, d s1, ; (16) V , V 2, r 2 s0 , d r 2 j s0 , j d r 2 j s0 r 2 j s0 p2 j s0 p2 s, d s2, ; (17) p1 s, d s1, ; (18); p2 s, d s2, . (19) 25 30 Вирази (18), (19) являють собою інтегральні рівняння типу згортки для проекції вектора потоку акустичної потужності модулем s, на площину ΟΧΥ з ядром p1 , p2 амплітудною діаграмою направленості векторних приймачів і правою частиною відповідних їм вихідних сигналів s1, , s2, . Для чисельного рішення рівнянь виконується дискретизація їх діаграм направленості p1 , p2 і правих частин s1 , s2 no кутових змінних , . m 0 ,. M 1; 0 ,. M 1; 2 / M : d ; m m ; ; 0 ,. L 1; (20) p1m p1m p1m, ; 35 (21) p2m p2m p2m, ; s1, s1m, s1m, ; s2, s2m, s2m, . (22) Позначення w , s , . (23) З урахуванням (20)-(23) 3 2 / L ; UA 105308 U p1 s, d p1m, w , s1m, ; 0 ,. M 1; m 0 ,. M 1; 0 ,. L 1; (24) p2 s0 , d p2m, w , s2m, ; 0 ,. M 1; m 0 ,. M 1; 0 ,. L 1. (25) Співвідношення (24), (25) являють собою систему лінійних рівнянь М-го порядку для невідомої змінної - вектора по індексу w, на частоті з матрицею коефіцієнтів p1m, , 5 p2m, та правою частиною - вектором s1m, , s2m, . Відновлення "фізичного" кутового розподілу потоку потужності на площині ΟΧΥ - w om, можливо рішенням довільної із систем 10 рівнянь (24), (25). Пропонується по виміряних відліках u , v вихідних сигналів одиничного комбінованого акустичного приймача сформувати апаратний кутовий розподіл потоку потужності низької розрізняльності s1m, є на площині OXY шляхом синус-косинусної інтерполяції відліків u , v та відновити "фізичний" кутовий розподіл потоку потужності високої розрізняльності w om, рішенням системи лінійних рівнянь Μ-го порядку по виміряному апаратному кутовому розподілу потоку потужності низької розрізняльності на кожній частоті - U1m, , V1m, і відомої діаграмі 15 20 направленості p1m, p2m, . Вихідне інтегральне рівняння Фредгольма першого роду (15) та його алгебраізоване наближення - система рівнянь (24) належать до некоректного типу задач, що вимагає спеціальних методів їх рішення. У пристрої, що заявляється, відновлення "фізичного" кутового розподілу потоку потужності високої розрізняльності - w om, виконується методом регуляризації Лаврентьєва. [5] Sq, expi 2 q / M ; w om, Rq q 0 ,. L 1; q 0 ,. M 1; 0 ,. M 1; (26) де: S1q, s1m, exp i 2 q m / M ; 0 ,. L 1; q 0 ,. M 1; 0 ,. M 1; (27). m Rq p1m,0 exp i 2 q m / M ; q 0 ,. M 1; m 0 ,. M 1; (28) 25 10 6 10 8 - параметр регуляризації S1 - Фур'є спектр по кутовій змінній m правої частини системи рівнянь (21) - вектора s1m, . 30 35 40 45 R - Фур'є спектр по кутовій змінній m діаграми направленості p1m, 0 . Поставлена задача вирішується тим, що, у відомій позиційній шумопелегаторній станції, що містить гідроакустичний модуль, який включає комбінований акустичний приймач у складі приймача акустичних сигналів Vx складової коливальної швидкості, приймача акустичних сигналів Vy складової коливальної швидкості, приймача акустичних сигналів тиску P , Тракт аналогової обробки сигналів, у складі X каналу підсилення сигналів, Y каналу підсилення сигналів, P каналу підсилення сигналів, кожний з яких містить вхідний підсилювач, елемент регулювання підсилення, низькочастотний преселектор сигналів, вихідний підсилювач, включені послідовно, контролер тракту аналогової обробки, перший, другий, третій входи якого з'єднані з виходами, відповідно, X каналу підсилення ННЧ сигналів, Y каналу підсилення сигналів, P каналу підсилення сигналів, а їх входи АРУ з'єднані з виходом управління контролера тракту аналогової обробки сигналів, компас, перший контролер обміну, з'єднаний першим входом D магістраллю даних і управління гідроакустичного модуля із входом-виходом D контролера тракту аналогової обробки сигналів і виходом D компаса, блок електроживлення гідроакустичного модуля, береговий пост обробки даних, що містить другий контролер обміну, пристрій електроживлення електронної апаратури, цифрову обчислювальну систему обробки даних, управління в складі блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах, блока виміру параметрів, відображення, управління, канал зв'язку гідроакустичного модуля з береговим постом обробки даних, новим є те, що в цифрову обчислювальну систему обробки даних, управління вводяться включені 4 UA 105308 U 5 10 15 20 послідовно блок формування апаратного, кутового розподілу потоку потужності низької розрізняльності на площині ΟΧΥ на L частотах, з'єднаний першим входом-виходом D із другим входом-виходом D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ горизонтальної площини ΟΧΥ на L частотах, блок відновлення "фізичного", кутового розподілу потоку потужності високої розрізняльності на площині ΟΧΥ та порогової обробки на L частотах, з'єднаний своїм другим входом-виходом D з першим входом-виходом D блока виміру параметрів, відображення, управління, другий вхід вихід D якого і перший вхід-вихід D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах магістраллю команд і даних цифрової обчислювальної системи з'єднані з першим входом-виходом D другого контролера обміну, канал зв'язку Гідроакустичного модуля з апаратурою берегового поста виконаний у вигляді електричного кабелю, що з'єднує інформаційними жилами другий вхід-вихід D першого контролера обміну із другим входомвиходом D другого контролера обміну, а жилами живлення вихід пристрою електроживлення електронної апаратури із входом блока електроживлення гідроакустичного модуля. Пропоноване технічне рішення пояснюється наступними графічними матеріалами: на Фіг. 1 представлена структура Позиційної шумопеленгаторної станції; на Фіг. 2 представлена структура канальних підсилювачів сигналів; на Фіг. 3 представлена структура Системи цифрової обробки сигналів; на Фіг. 4 представлені: штриховою лінією p сигнал ненаправленого приймача тиску, як функція кута приходу сигналу , безперервною товстою лінією u cos - сигнал приймача коливальної швидкості, орієнтованого уздовж осі ОХ, безперервною лінією середньої товщини v sin - сигнал приймача коливальної швидкості, орієнтованого уздовж осі ΟΥ, пунктирною лінією U1 cos 1 - сигнал "фантомного" приймача коливальної швидкості, орієнтованого під кутом 1 / 6 щодо осі ОХ, сформованого синус-косинусною інтерполяцією сигналів u і 25 v по кутовій змінній , безперевною лінією середньої товщини U2 cos 2 - сигнал "фантомного" приймача коливальної швидкості, орієнтованого під кутом 2 2 / 3 відносно осі ОХ, сформованого синус-косинусною інтерполяцією сигналів u і v по кутовій змінній ; на Фіг. 5 представлені у полярних координатах діаграми направленості у горизонтальній площині: штриховою лінією p - приймача тиску, безперервною товстою лінією u - приймача 30 коливальної швидкості, орієнтованого у напрямку осі ОХ, безперервною лінією середньої товщини v - приймача коливальної швидкості, орієнтованого у напрямку осі ΟΥ, пунктирною лінією U1 - фантомного приймача коливальної швидкості, орієнтованого під кутом 1 / 6 , сформованого синус-косинусною інтерполяцією сигналів u і v , безперервною тонкою лінією U2 - фантомного приймача коливальної швидкості, орієнтованого під кутом 2 2 / 3 , 35 сформованого синус-косинусною інтерполяцією сигналів u , v ; 40 на Фіг. потужності косинусної виміряним OXY - U1 6 представлені: штриховою лінією U1m - апаратне кутове розподілення потоку на площині OXY, яке отримане електронним скануванням простору шляхом синусінтерполяції сигналів um і v m , пунктиром z1m - рішення системи рівнянь за кутовим розподілом модуля потоку потужності низької розрізняльності на площині та передавальній функції - діаграмі направленості pm , яке включає хибний відлік, дзеркальний відносно істинного, для кута орієнтації вектора потоку потужності на горизонтальній площині 63 , безперервною лінією w1m - "фізичне" кутове розподілення модуля потоку потужності на площині високої розрізняльності - рішення системи рівнянь для "фізичного" спектра - w по виміряному апаратному кутовому розподілу модуля потоку 45 потужності на площині OXY - U1m та діаграмі направленості - p , відселектоване від "невірного" за знаком проекції вектора потоку потужності на вісь ОХ - U1m ; на Фіг. 7 представлено безперервною лінією w1m - "фізичний » кутовий розподіл модуля потоку потужності на площині високої розрізняльності - рішення системи рівнянь по виміряному 5 UA 105308 U апаратному кутовому розподілу модуля потоку потужності на площині OXY - U1m , отриманому електронним скануванням та діаграмі направленості - p , відселектоване від "невірного" за 5 знаком проекції вектора потоку потужності на вісь OX - U1m ; на Фіг. 8 одиничним стовпцем представлено сингулярний кутовий розподіл модуля потоку потужності на площині OXY som 127, m у функції кута m ; на Фіг. 9 представлені: безперервною лінією середньої товщини dm діаграма направленості прототипу у горизонтальній площині OXY, безперервною тонкою лінією w1m - рішення системи рівнянь по виміряному апаратному кутовому розподілу модуля потоку потужності на площині OXY - U1m та діаграмі направленості - pm , відселектоване за знаком проекції вектора потоку 10 15 20 25 30 35 40 45 50 потужності на вісь OX- U1m Позиційна шумопеленгаторна станція 1 містить Гідроакустичний модуль 2, встановлений на дні моря акустичний приймач 3 у вигляді Комбінованого акустичного приймача, у складі приймача акустичних сигналів X складової коливальної швидкості 4, приймача акустичних сигналів Y складової коливальної швидкості 5, приймача акустичних сигналів тиску P 6, Тракт аналогової обробки сигналів 7 у складі X каналу підсилення сигналів 8, Y каналу підсилення сигналів 9, P каналу підсилення сигналів 10, кожний з яких виконаний у вигляді вхідного підсилювача 11, елемента регулювання підсилення 12, низькочастотного преселектора 13, вихідного підсилювача 14, включених послідовно, контролера 15 тракту аналогової обробки сигналів 7, перший, другий, третій, входи якого з'єднані з виходами, відповідно, X каналу підсилення сигналів 8, Y каналу підсилення сигналів 9, P каналу підсилювача сигналів 10, а їх входи АРУ з'єднані з виходом управління контролера 15 тракту аналогової обробки сигналів 7, компас 16, перший контролер обміну 17, з'єднаний першим входом D магістраллю даних і управління гідроакустичного модуля 2 з виходом D контролера 15 тракту аналогової обробки сигналів 7 і виходом D компаса 16, блок електроживлення гідроакустичного модуля 18, береговий пост обробки даних 20, що містить другий контролер обміну 21, пристрій електроживлення електронної апаратури 22, Цифрову обчислювальну систему обробки даних 23 у складі блока 24 формування проекції вектора потоку потужності сигналів на площину ΟΧΥ на L частотах, блока 27 порогової обробки, виміру параметрів відображення, управління, канал зв'язку 19 Гідроакустичного модуля 2 з береговим постом обробки даних 20, при цьому у цифрову обчислювальну систему обробки даних 23 уводяться включені послідовно блок 25 формування апаратного кутового розподілу потоку потужності низької розрізняльності на площині OXY на L частотах, з'єднаний своїм першим входом-виходом D із другим входом-виходом D блока 24 формування проекції вектора потоку потужності акустичних сигналів на площину OXY на L частотах, блок 26 відновлення "фізичного" кутового розподілу потоку потужності високої розрізняльності в площині OXY та порогової обробки на L частотах, з'єднаний своїм другим входом-виходом D з першим входом-виходом D блока 27 виміру параметрів, відображення, управління, другий вхід-вихід D якого і перший вхід-вихід D блока 24 формування проекцій вектора потоку потужності на осі OX, OY площини OXY на L частотах магістраллю команд і даних Цифрової обчислювальної системи з'єднані з першим входом виходом D другого контролера обміну 21, а канал зв'язку 19 виконаний у вигляді електричного кабелю, що з'єднує інформаційними жилами другий вхід-вихід D першого контролера обміну 17 із другим входомвиходом D другого контролера обміну 21, жилами живлення вихід пристрою електроживлення електронної апаратури 22 із входом блока електроживлення 18 гідроакустичного модуля 2. Пристрій працює в такий спосіб. Вихідні сигнали: xt приймача X складової коливальної швидкості 4, yt приймача Y складової коливальної швидкості 5, pt приймача акустичних сигналів тиску P 6 - надходять відповідно на входи X , Y , P каналів підсилення 8, 9, 10. Сигнали в X , Y , P каналах підсилення 8, 9, 10. підсилюються, стаціонаризуються автоматичним регулюванням підсилення по керуючих командах контролера 15 тракту аналогової обробки ННЧ сигналів 7, фільтруються канальними преселекторами смугою Df (10 250 ) Гц, надходять, відповідно, на 1-й, 2-й, 3-й входи контролера 15 Тракту аналогової обробки сигналів 7 і синхронно дискредитуються із частотою Fд 512 . 6 UA 105308 U t x t t g1 xt d ; (29) yt y1t pt p1t t g1 yt d ; (30) t g1 pt d ; (31) 5 t tn n t ; t 1/ F ; xt x n ; yt y n ; pt pn ; (32) g1 - імпульсна характеристика безперервної лінійної системи - каналу підсилення сигналів 10 зі смугою преселектора - Df (10 250 ) Гц. Через перший контролер обміну 17, канал зв'язку 19, другий контролер обміну 21 відліки дискретизованих сигналів - x n ; y n ; pn з виходу контролера 15 Тракту аналогової обробки сигналів 7 надходять на 1-й вхід-вихід D блока 24 формування проекції вектора потоку потужності акустичних сигналів на площину ΟΧΥ, відліки сигналу компаса 16 - n надходять 15 на 2-й вхід-вихід D блока 27 виміру параметрів, відображення, управління. Блок 24 формування проекції вектора потоку потужності акустичних сигналів на площину O ΧΥ виконує наступні дії: - набирає масиви N канальних часових відліків сигналів xk,n ; yk,n ; k,n на N p часових інтервалах T , що не перекриваються і обчислює їх комплексні спектри Xk, ; Yk, ; Pk, , N F T ; n 0,..N 1; k 0,..N 1; 0,..L 1 ; (34) Xk, xk,n exp j 2 n / N ; (35) n Yk, yk,n exp j 2 n / N ; (36) n 20 Pk, pk,n exp j 2 n / N ; (37) n - формує ортогональні компоненти проекції вектора потоку потужності акустичних сигналів на площину OXY - uk, , vk, поелементним перемноженням комплексних відліків Xk, , Yk, з комплексно спряженими відліками P *k, на L частотах 25 0,..N 1; (38) k, X1k, P *k, ; (39) k, Y1k, P *k, ; (40) - накопичує відліки k, , k, за N періодів Фур'є - аналізу на n частотах k 0,..N 1; 0,..L 1 ; (41) u k, ; (42) 30 35 v k, ; (43) - передає масиви з N накопичених відліків сигналів u , v на L частотах у блок 25 формування кутового розподілу вектора потоку потужності низької розрізняльності на площині OXY на L частотах. Блок 25 формування кутового розподілу вектора потоку потужності низької розрізняльності на площині OXY на L частотах виконує наступні дії: - формує множину M біполярних відліків U, із кроком 2 / M синус-косинусною інтерполяцією відліків сигналів u , v по кутовій змінній на L частотах 0,..M 1 ; 0,..L 1 ; (44) U, u cos v sin ; (45) 40 - формує множину M уніполярних відліків s, із кроком 2 / M на L частотах 0,..M 1 ; 0,..L 1 ; (46) s, U, ; (47) 7 UA 105308 U - передає масиви відліків s, на L частотах у блок 26 формування "фізичного" кутового 5 розподілу вектора потоку потужності високої розрізняльності на площині OXY на L частотах. Блок 26 формування "фізичного" кутового розподілу потоку потужності високої розрізняльності на площині OXY на L частотах регуляризацією за Лаврентьєвим виконує наступні дії: - обчислює комплексний спектр S,q на множині відліків s, по кутовій змінній на L частотах 0,..M 1 ; q 0,..M 1; 0,..L 1 ; (48) S1,q s1, exp j 2 q / M ; (49) 10 - обчислює комплексний спектр Z1,q по кутовій змінній на множині відліків S,q , R q на L частотах Rq r exp j 2 q / M ; q 0,..M 1; 0,..L 1 ; (50) Z1,q S1,q / Rq ; q 0,..M 1; 0,..L 1 ; (51) 15 де 10 6 10 8 - параметр регуляризації r cos - уніполярна діаграма направленості векторного приймача X каналу коливальної швидкості. R q - попередньо обчислений комплексний спектр уніполярної діаграми направленості векторного приймача X каналу коливальної швидкості - обчислює зворотне ДПФ масиву відліків комплексного спектра Z1,q на L частотах 20 q 0,..M 1; 0,..L 1 ; m 0,..M 1; (52) z,m Z1, expj 2 m q / M ; (53) q 25 30 - виконує формування "фізичного" кутового розподілу вектора потоку потужності високої розрізняльності на площині OXY - w ,m на L частотах виключенням фантомних відліків шляхом знакової селекції згідно з умовою - дійсний відлік розташовано в області кутів, де проекція вектора потоку потужності низької розрізняльності в площині OXY на вісь ОХ додатна U1,m 0 , z1,m w1,m z1 1 signU1,m . ; m 0,..M 1; 0,..L 1 ; (54) , - обчислює середньоквадратичне по M L просторово-частотних каналах значення завади у смузі сигналів та адаптивний поріг П . m 0,..M 1; 0,..L 1 ; m (56) w12 w , m M N ; (57) m w1 w.1, m M L ; (58) m w12 w1 2 оF ; (60) 35 1/ 2 ; (59) F 10 6 10 8 - ймовірність хибних тривог оF - поріг для нормованої нормальної завади o 1 - виконує порогову обробку множини M N відліків w1,m m 0,..M 1; 0,..L 1 ; (61) 1 if w1,m 0 ; є сигнал в m -м частотно-кутовому стробі. 40 ,m (62) 0 if w1,m 0 ; відсутність сигналу в m -м частотно- кутовому стробі. 8 UA 105308 U - передає формуляри , m; ;m; w1,m відліків, які перевищили поріг та відселектовані від хибних, у блок 27 виміру параметрів відображення й управління. Блок 27 виміру параметрів, відображення і управління обчислює частоту сигналу f,m 5 10 15 пеленг ,m з поправкою на кут орієнтації Гідроакустичного модуля - , відліків w1,m , що перевищили поріг, та відображає дані на індикаторі. f,m f ; f 1/ N t ; (63) ,m mod m , 2 ; 2 / M . (64) Виявлення об'єкта по його власному випромінюванню наднизьких частот в прототипі і пристрої, що заявляється, забезпечується просторовою, частотно-часовою обробкою. У прототипі акустична система - лінійна дискретна антена, утворена H комбінованими акустичними приймачами, розставленими еквідистантно із кроком b без екрана. Діаграма направленості прототипу в горизонтальній площині - dпрот складної антени згідно з [1] визначається виразами (65), (66), (67) dпрот r1кап r 2лін cos sin H b / sin / H sin b / sin ; (65) де r кап cos ; (66). r кап - діаграма направленості одиночного КАП. 20 r 2лін sin H b / sin / H sin b / sin (67) r 2лін - діаграма направленості лінійної дискретной антени H ненаправлених приймачів, розташованих еквідистантно з між елементною відстанню b та довжиною хвилі .[1] У прототипі ширина діаграми направленостіі, описуваної (65), на рівні половинної потужності - 0.5 прот , розрахована при H 7 , b / 0.5 дорівнює 0.5 прот 11.7 . (68) 25 У пристрої, що заявляється, з M променів, утворених синус-косинусною інтерполяцією вихідних сигналів одиничного КАП та редукцією до "ідеального" вимірювального приладу як діаграма направленості в горизонтальній площині - r in приймається рішення алгебраїчної 30 системи рівнянь типу згортки M -го порядку - w ,m методом регуляризації за Лаврентьєвим для сингулярного кутового спектра на вході, відповідному апаратному кутовому розподілу потоку потужності на виході та відомій передатній функції - діаграмі направленості векторного приймача при одиночному точковому джерелу за відсутності шумів. r m in w m ; (69) де m m ; m 0,..M 1; 2 / M . (70) Ширина діаграми направленості 0.5 in у пропонованому пристрої приймається такою, що дорівнює - дискрету кутової змінної алгебраїчної системи рівнянь - при M 256 35 40 45 0.5 in 360/ 256 180/ 1.4 ; (71) Потенційна точність виміру кутової координати - середньоквадратична похибка виміру пеленга - при максимальному амплітудному методі пеленгування в прототипі і пристрої, що заявляється, дорівнює згідно з [6] 0.6 0.5 ; (72) де - пеленгаційна чутливість. При однакових значеннях параметра γ виграш у точності пеленгування дорівнює B prot / in 0.5 prot / 0.5 in .(73) Рішення, що заявляється, при однакових параметрах частотно-часової обробки забезпечує підвищення точності пеленгування в 8.3 разу; зменшення апаратурних витрат у гідроакустичному модулі - числа комбінованих векторних приймачів в 7 раз (14 приймачів коливальної швидкості, 7 приймачів тиску); числа каналів підсилення в 21 раз. Порівнювані параметри прототипу і технічного рішення, що заявляється, наведені в Таблиці. Джерела інформації: 9 UA 105308 U 5 10 1. Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике, с. 10, 18, 19 Ленинград "Судостроение". 1988. 2. Ряписов. Е. Гидроакустические станции с гибкими протяженными буксируемыуи антеннами ВМС США. Commi narod ru > txt / 1995 / 017. htm 3. Гидроакустический комплекс для измерения азимутального угла на источник звука в (19) (11) (13) мелком море SU 2474836 4. Щуров В.А. Векторная акустика океана. Владивосток. Дальнаука. 2003. 5. Верлань А.Ф., Сизиков В.С. Интегральные уравнения. Методы. Алгоритмы. Программы, с. 289-291. Киев. Наукова думка. 1986 6. Колчеданцев А.С. Гидроакустические станции, с. 54 Ленинград. Судостроение. 1982. Таблиця Пристрій Параметр Число комбінованих акустичних приймачів Ширина диграми направленості 0.5 Виграш у точності вимірювання пеленгу Прототип 7 11.7° 1 1.4° B prot / in 0.5 prot / 0.5 in Нове технічне рішення 8.3 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 Позиційна шумопеленгаторна станція, що містить гідроакустичний модуль, який включає комбінований акустичний приймач у складі приймача акустичних сигналів Vx складової коливальної швидкості, приймача акустичних сигналів Vy складової коливальної швидкості, приймача акустичних сигналів тиску Р, тракт аналогової обробки сигналів, у складі X каналу підсилення сигналів, Y каналу підсилення сигналів, Ρ каналу підсилення сигналів, кожний з яких містить вхідний підсилювач, елемент регулювання підсилення, низькочастотний преселектор сигналів, вихідний підсилювач, включені послідовно, контролер тракту аналогової обробки сигналів, перший, другий, третій входи якого з'єднані з виходами, відповідно, X каналу підсилення ННЧ сигналів, Υ каналу підсилення сигналів, Ρ каналу підсилення сигналів, а їх входи АРУ з'єднані з виходом управління контролера тракту аналогової обробки сигналів, компас, перший контролер обміну, з'єднаний першим входом D магістраллю даних і управління гідроакустичного модуля із входом-виходом D контролера тракту аналогової обробки сигналів і виходом D компаса, блок електроживлення гідроакустичного модуля, береговий пост обробки даних, що містить другий контролер обміну, пристрій електроживлення електронної апаратури, цифрову обчислювальну систему обробки даних, управління в складі блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах, блока виміру параметрів, відображення, управління, канал зв'язку гідроакустичного модуля з береговим постом обробки даних, яка відрізняється тим, що в цифрову обчислювальну систему обробки даних, управління вводяться включені послідовно блок формування апаратного, кутового розподілу потоку потужності низької розрізняльності на площині ΟΧΥ на L частотах, з'єднаний першим входом-виходом D із другим входом виходом D блока частотночасового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ горизонтальної площини ΟΧΥ на L частотах, блок відновлення фізичного, кутового розподілу потоку потужності високої розрізняльності на площині ΟΧΥ та порогової обробки на L частотах, з'єднаний своїм другим входом-виходом D з першим входом виходом D блока виміру параметрів, відображення, управління, другий вхід-вихід D якого і перший вхід-вихід D блока частотно-часового формування проекцій вектора потоку потужності на осі ΟΧ, ΟΥ площини ΟΧΥ на L частотах магістраллю команд і даних цифрової обчислювальної системи з'єднані з першим входомвиходом D другого контролера обміну, канал зв'язку гідроакустичного модуля з апаратурою берегового поста виконаний у вигляді електричного кабелю, що з'єднує інформаційними жилами другий вхід-вихід D першого контролера обміну із другим входом-виходом D другого контролера обміну, а жилами живлення вихід пристрою електроживлення електронної апаратури - із входом блока електроживлення гідроакустичного модуля. 10 UA 105308 U 11 UA 105308 U 12 UA 105308 U 13 UA 105308 U 14 UA 105308 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 15
ДивитисяДодаткова інформація
Автори англійськоюZatserkovskyi Ruslan Oleksiiovych, Kotsiuba Vitalii Semenovych, Melenko Yurii Yaroslavovych
Автори російськоюЗацерковский Руслан Алексеевич, Кочерга Виталий Семенович, Меленко Юрий Ярославич
МПК / Мітки
МПК: H04B 10/00, G01H 17/00, G10K 11/00
Мітки: шумопеленгаторна, позиційна, станція
Код посилання
<a href="https://ua.patents.su/17-105308-pozicijjna-shumopelengatorna-stanciya.html" target="_blank" rel="follow" title="База патентів України">Позиційна шумопеленгаторна станція</a>
Станція радіотехнічного контролю
Номер патенту: 97271
Опубліковано: 25.01.2012
Автори: Яковлев Віталій Васильович, Рябкін Юрій Вікторович, Немчин Олександр Федорович, Коротков Вячеслав Валентинович, Гришко Микола Мефодійович, Марченко Василь Васильович
МПК: G01S 3/02, G01S 13/66
Мітки: контролю, радіотехнічного, станція
Формула / Реферат:
1. Станція радіотехнічного контролю, що містить антенно-фідерну систему, радіоприймальний тракт та систему керування, аналізу та обробки сигналів, при цьому до складу радіоприймального тракту входять блок комутації та керування антенно-фідерною системою, багатоканальний радіоприймальний пристрій, блок комутації сигналів проміжної частоти, блок комутації відеосигналів та блок керування станцією - автоматизоване робоче місце, до складу системи...
Відмовостійка гідроакустична станція

Номер патенту: 83799
Опубліковано: 25.09.2013
Автори: Меленко Юрій Ярославович, Халілов Едуард Магеррамович, Зубченко Ігор Васильович, Гулега Леонід Григорович, Коцюба Віталій Семенович, Зацерковський Руслан Олексійович, Фалєєв Ігор Михайлович, Ковальчук Костянтин Володимирович
МПК: G01S 13/42, H01Q 21/00, G01S 13/90
Мітки: станція, відмовостійка, гідроакустична
Формула / Реферат:
Відмовостійка гідроакустична станція, яка включає локаційний комплекс, що містить М-канальну антенну систему приймачів-випрoмінювачів, М комутаторів "Випромінювання - Прийом", підключених своїми входами - виходами до відповідних приймачів-випрoмінювачів, Тракт збудження приймачів-випрoмінювачів, підключений своїми М виходами до входів М відповідних комутаторів "Випромінювання - Прийом", Тракт передуючої аналого-цифрової...
Відмовостійка гідроакустична станція

Номер патенту: 105448
Опубліковано: 12.05.2014
Автори: Зубченко Ігор Васильович, Халілов Едуард Магеррамович, Гулега Леонід Григорович, Ковальчук Костянтин Володимирович, Зацерковський Руслан Олексійович, Фалєєв Ігор Михайлович, Меленко Юрій Ярославович, Коцюба Віталій Семенович
МПК: G01S 13/42, G01S 13/90
Мітки: станція, відмовостійка, гідроакустична
Формула / Реферат:
Відмовостійка гідроакустична станція, яка включає локаційний комплекс, що містить М-канальну антенну систему приймачів-випромінювачів, М комутаторів Випромінювання-Прийом, підключених своїми входами-виходами до відповідних приймачів-випромінювачів, тракт збудження приймачів-випромінювачів, підключений своїми М виходами до входів М відповідних комутаторів Випромінювання-Прийом, тракт передуючої аналого-цифрової обробки сигналів, підключений...
Позиційна сервосистема
Номер патенту: 78637
Опубліковано: 10.04.2007
Автори: Євстаф''єв Євген Володимирович, Кучеров Дмитро Павлович, Гамалій Наталія Вікторівна, Трач Віктор Іванович, Чіпіжко Юрій Анатолійович, Богучарський В''ячеслав Вікторович
МПК: H02P 6/00, G05G 19/00, G05B 11/00
Мітки: позиційна, сервосистема
Формула / Реферат:
Позиційна сервосистема, яка містить керуючу частину, що складається з формувача вектора стану, пристрою стикування з шиною локальної системи керування, обчислювача різниці, регулятора положення та суматора, виконавчу частину, що складається з підсилювача-комутатора, виконавчого двигуна, редуктора та об'єкта регулювання, канал вимірювання, що складається з датчиків швидкості та положення, при цьому вихід формувача вектора стану зв'язано з...
Борона гнучка просапна позиційна м.і.бездольного
Номер патенту: 72473
Опубліковано: 15.03.2005
Автор: Бездольний Микола Іванович
МПК: A01B 19/00
Мітки: гнучка, борона, просапна, позиційна, м.і.бездольного
Формула / Реферат:
Борона гнучка просапна позиційна, що має раму, виконану у вигляді вертикального бруса для кріплення у штатному гнізді просапного культиватора і прикріплених до нього гряділів, до кінців яких приєднаний з можливістю обертання навколо поздовжньої осі ланцюговий зубовий модуль, а в середній частині гряділів установлена розпірна штанга для зміни відстані між їх кінцями, яка відрізняється тим, що гряділі виконані у вигляді П-подібної рамки, яка...
Попередній патент: Спосіб моделювання хронічного калькульозного холециститу
Наступний патент: Рахівниця соробан
Випадковий патент: Спосіб відновлення зношених поверхонь металевих деталей